Внешние силы и нагрузки
Все внешние силы (нагрузки), действующие на изучаемое тело, следует рассматривать как проявление взаимодействия его с окружающими телами, которое представляется в виде сил или пар сил (моментов).
Все внешние силы (нагрузки) могут рассматриваться как сосредоточенные или распределённые.
В природе сосредоточенных сил не бывает. Все реальные тела практически контактируют через небольшие площадки. Однако принцип Сен-Венана позволяет распределенную нагрузку заменить равнодействующей силой, что упрощает расчёт.
Сосредоточенные нагрузки выражаются в ньютонах [H] и обозначается буквой F.
Распределённые нагрузки обозначаются буквой q и они бывают:
- поверхностными (например, давление ветра, воды на стенку). Размерность [FL-2].
- объёмными. Их размерность [FL-3].
- распределенными по длине (например, силу тяжести стержня, учитывая небольшие размеры его поперечного сечения, рассматривают как распределённую нагрузку по длине).


Сосредоточенные и распределённые нагрузки могут быть как статическими, так и динамическими.
Статическими называются нагрузки, которые изменяют свою величину или точку приложения с очень небольшой скоростью, так что возникающими при этом ускорениями можно пренебречь.
Динамическими называются нагрузки, изменяющиеся во времени с большой скоростью. Возникшие при этом силы инерции могут многократно превосходить те же нагрузки, приложенные статически.
Законы изменения нагрузок во времени могут иметь весьма сложный характер.
В сопротивлении материалов основным изучаемым элементом конструкции является брус – тело, у которого один из линейных размеров (длина) значительно превышает два других, определяющих поперечное сечение. При работе конструкции ее элементы воспринимают внешние силы и действие их передают друг другу.
Классификация внешних нагрузок
Внешние силы делятся на активные и реактивные (реакции связей).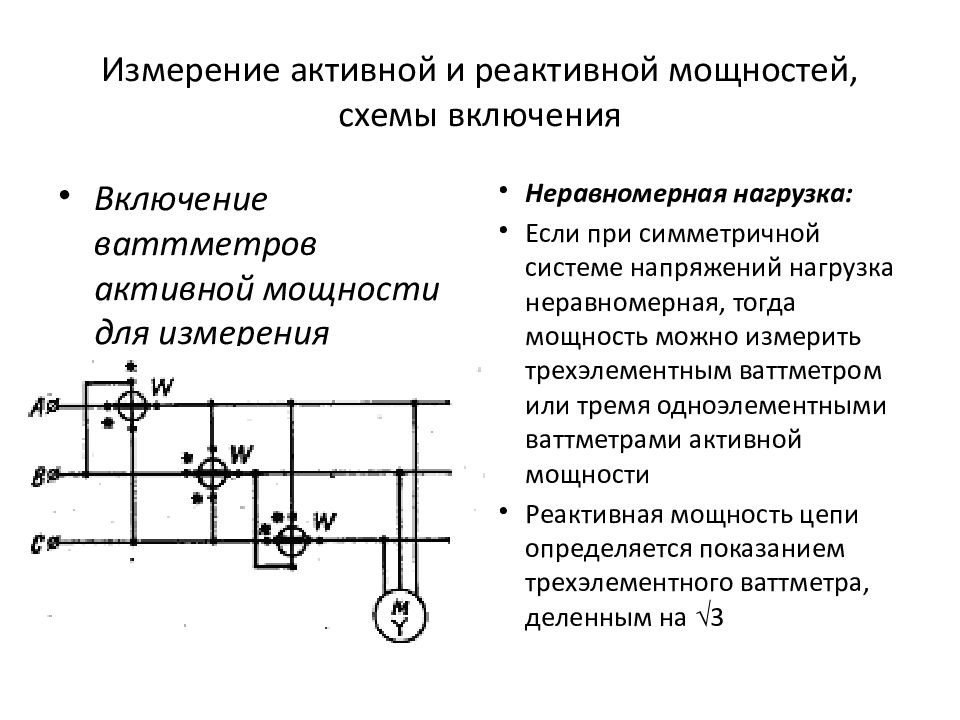 Активные связи принято называть нагрузками.
Активные связи принято называть нагрузками.
По способу приложения нагрузки бывают объемные и поверхностные, распределенные и сосредоточенные, по характеру изменения в процессе приложения – статические, динамические и повторно-переменные, по продолжительности действия – постоянные и временные.
Примеры решения задач >
Внутренние силовые факторы >
Активные силы и реакции связей . 46. Силы внешние и внутренние
Введение в динамику механической системы. Механическая система. Классификация сил, действующих на механическую систему силы активные (задаваемые) и реакции связей силы внешние и внутренние. Свойства внутренних сил. Масса системы. Центр масс радиус-вектор и координата центра масс. [c.8]С и с т е м а с идеальными связями. Рассмотрим систему, на которую наложены связи, не изменяющиеся со временем. Разделим все действующие на точки системы внешние и внутренние силы на активные и реакции связей.

Внешнюю силу, приложенную к какой-либо точке системы, обозначим а внутреннюю А . Заметим, что внутренние и внешние силы могут включать в себя как активные силы, так и силы реакций связей. [c.281]
Внутренние силы не влияют явно на движение центра масс. Они могут влиять только неявно, через внешние силы. Следовательно, одними внутренними силами, без внешних, нельзя вывести из равновесия или изменить движение центра масс системы. Но внутренними силами для неизолированной механической системы можно создать движение отдельных частей системы и, следовательно, взаимодействие с внешними телами, вызывая этим внешние силы реакций связей или изменяя активные силы. Это может изменить движение центра масс или вывести его из равновесия.
В отличие от всех остальных сил, действующих на механическую систему и называемых активными силами, реакции внешних и внутренних связей называются пассивными. Модуль и направление каждой активной силы не зависит от других сил, приложенных к системе (например, силы тяжести и др.), модули же и направления реакций связей зависят от совокупности действующих на систему сил, а также и от движения системы.
Модуль и направление каждой активной силы не зависит от других сил, приложенных к системе (например, силы тяжести и др.), модули же и направления реакций связей зависят от совокупности действующих на систему сил, а также и от движения системы.
Теорема живых сил. Прежде чем выводить другие следствия из общего уравнения динамики, удобно установить здесь еще одну о ц ую теорему о движении системы, формулировка которой не зависит от подразделения сил на внешние и внутренние или активные и реакции связей. [c.278]
Как известно из теоретической механики, опорные реакции балок определяют путем составления для всей балки и решения уравнений равновесия статики. Будем помнить, что при определении внутренних сил реакции связей учитываются наравне с активными внешними силами, действующими на балку.
Как внешние, так и внутренние силы могут быть в свою очередь или активными, или реакциями связей. Разделение сил на внешние и внутренние является условным и зависит от того, движение какой системы тел мы рассматриваем. Например, если рассматривать
[c.331]
Например, если рассматривать
[c.331]
Дифференциальные уравнения движения системы. Рассмотрим систему, состоящую из п материальных точек. Выделим какую-нибудь точку системы с массой т — Обозначим равнодействующую всех приложенных к точке внешних сил (и активных и реакций связей) через Р1, а равнодействующую всех внутренних сил — через Р к. Если точка имеет при этом ускорение у, то по основному закону динамики
Определение 1. В отличие от сил реакций связей заранее заданные силы к (внутренние или внешние) называют активными силами. [c.115]
Следует отметить, что внутренние силы при действии па систему внешних активных сил или сил реакций внешних связей могут косвенно влиять на изменение количества движения системы Р и момента количества движения К. Не изменяя непосредственно эти величины, внутренние силы могут изменять состояние системы (г, у). Изменение состояния системы приводит, вообще говоря, к изменению результирующей внешних
 153]
153]
Силы, действующие на тела такой системы, можно подразделить на две категории внешние—силы, приложенные к телам данной системы, но обусловленные наличием других тел, не входящих в эту систему, ц внутренние—силы взаимодействия между телами одной и той же системы. Такое подразделение относится как к активным силам, так и к реакциям связей [c.87]
Установив понятие работы силы на возможном перемещении, можно расширить классификацию связей. Рассматривая силы, приложенные к точкам системы, для каждой точки можно распределить приложенные к ней силы на два класса активные силы н реакции связей. Обозначим равнодействующую всех активных сил (внешних и внутренних), приложенных к точке В/, равнодействующую всех сил реакций связей равнодействующую всех сил Е , т. е.
В неизолированных механических системах внутренние силы, вызывая движение отдельных частей системы вследствие взаимодействия о внешними телами или окружающей материальной средой, могут вызвать внешние силы в виде сил реакций связей или изменения активных сил, которые могут изменить количество движения системы. [c.289]
[c.289]
В уравнениях (27) и (29) в число внешних и внутренних сил входят и активные силы и силы реакции связей. Но в случае стационарных связей без трения реакции таких связей не производят работы при любом перемещении системы. Поэтому в этом случае неизвестные реакции связей не входят ни в одно из уравнений (27) и (29). [c.640]
Действительно, если система находится в равновесии, то в равновесии находятся и все тела данной системы. Поэтому мы можем каждое тело освободить от наложенных на него внешних и внутренних связей, заменив их соответствующими реакциями, и рассматривать равновесие каждого тела, используя уже знакомые нам условия равновесия. При этом только надо иметь ввиду, что внутренние силы взаимодействия между телами системы (активные и реакции внутренних связей) по аксиоме о равенстве сил действия и противодействия обязательно равны по модулю и имеют противоположные направления. Так, освобождая тело А (рис. 219) от внутренней связи 17
 259]
259]
Реакции представляют собой силы, определяемые связями в данном случае это будут внешние силы, так как они не вызываются действием точек, принадлежащих телу. В связи с этим необходимо различать два рода внешних сил активные, или прямо приложенные силы, которые задают произвольно и заставляют действовать на тело, и силы связи, или реакции, возникающие автоматически как следствия первых. Внутренние силы, действующие между точками системы, представляют собою также силы связи, но они попарно исключаются и не входят в условия равновесия.
К общим теоремам предыдущего параграфа мы пришли, отправляясь от разделения сил, действующих на систему, на внешние и внутренние. Здесь мы применим другой критерий классификации (п. 3) и разделим эти силы на активные (или прямо приложенные) и реакции связей. Точнее, обозначим через f,- равнодействующую активных сил, приложенных к любой точке [c.266]
Отметим, что деления системы сил на внутренние и внешние силы и на активные силы и реакции связей не взаимосвязаны.
 [c.89]
[c.89]Общие замечания о теоремах и законах динамики. Рассмотрим движение системы материальных точек Pj = 1, 2,. .., N) в некоторой инерциальной системе координат. Пусть — масса точки а — ее радиус-вектор относительно начала координат. Если система несвободна, то ее можно рассматривать как свободную, если помимо активных сил, приложенных к точкам системы, учесть реакции связей. Если затем все силы, приложенные к системе, разбить на внешние и внутренние, то из аксиом Ньютона получим дифференциальные уравнения движения рассматриваемой механической системы в виде [c.156]
Представляется также интересным разделить реакции связей, подобно активным силам, на внутренние и внешние ( 171). Если внутренние связи идеальны, сумма их реакций равна нулю [c.303]
Если ввести понятия реактивных и активных переменных, причем первые характеризуют реакцию материала на внешние термомеханические воздействия, а вторые — внутренние силы, порожденные этими воздействиями, то каждая активная переменная связана с реактивными переменными с помощью определяющего уравнения. При этом также существует и обратная связь, т.е. каждая реактивная переменная зависит от активных переменных. В соответствии с принципом причинности любая реактивная переменная может зависеть от настоящих и прошлых значений активных переменных, но не от их значений в будущем.
[c.182]
При этом также существует и обратная связь, т.е. каждая реактивная переменная зависит от активных переменных. В соответствии с принципом причинности любая реактивная переменная может зависеть от настоящих и прошлых значений активных переменных, но не от их значений в будущем.
[c.182]
В теории механизмов, в зависимости от характера решаемых задач, применяют различные классификации сил. Согласно первой классификации действующие на механическую систему силы подразделяют на заданные (активные) и реакции связей. Согласно второй классификации действующие на систему силы делят на внешние и внутренние по отношению к этой системе. Эти две классификации сил известны из курса обнщй механики. Третья классификация является специфичной для теории механизмов. Согласно третьей классификации силы, действующие на механизм и развивающие мощность, подразделяют на силы движущие и силы сопротивления. [c.56]
Принцип Даламбера для системы материальных точек. Рассмотрим систему п материальных точек М, М ,. . ., Л/ , на которую наложены геометрические неосвобождающие связи (н. 1.1. гл. XVII), которые, вообще говоря, не будем предполагать стационарными и идеальными. Массы точек обозначим mi, m2,. .., т . Равнодействующую заданных активных сил (как внешних, так и внутренних), приложенных к v-й точке, обозначим Fv, а равноде11ствующую реакций связей, приложенных к v-й точке, через (v = l, 2,. … .., п) (рис. 20.4). Для каждой из точек системы, на основании второго закона Ньютона, будем иметь
[c.363]
Рассмотрим систему п материальных точек М, М ,. . ., Л/ , на которую наложены геометрические неосвобождающие связи (н. 1.1. гл. XVII), которые, вообще говоря, не будем предполагать стационарными и идеальными. Массы точек обозначим mi, m2,. .., т . Равнодействующую заданных активных сил (как внешних, так и внутренних), приложенных к v-й точке, обозначим Fv, а равноде11ствующую реакций связей, приложенных к v-й точке, через (v = l, 2,. … .., п) (рис. 20.4). Для каждой из точек системы, на основании второго закона Ньютона, будем иметь
[c.363]
Действующие на механическую систему активные силы 1 реакции связей разделя-ют на внешние F% и внутренние Fi (индексы е и i от латинских exterior — внешний и interior — внутренний). Внешними называют силы, действующие на точки системы со стороны точек или тел, не входящих в состав данной системы. Внутренними называют силы, с которыми точки или тела данной системы действуют друг на друга. Это разделение является условным и зависит от того, какая механическая система рассматривается. Например, если рассматривается движение всей Солнечной системы, то сила притяжения Земли к Солнцу будет внутренней если же рассматривается движение системы Земля — Луна, то для этой системы та же сила будет внешней.
[c.263]
Например, если рассматривается движение всей Солнечной системы, то сила притяжения Земли к Солнцу будет внутренней если же рассматривается движение системы Земля — Луна, то для этой системы та же сила будет внешней.
[c.263]
Рассмотрим теперь механическую систему, состоящую из п материальных точек. Выделим какую-нибудь из точек системы с массой wZfe. Под действием приложенных к ней внешних и внутренних сил и Fi (в которые входят и активные силы, и реакции связей) точка будет двигаться по отношению к инерциальной системе отсчета с некоторым ускорением сг . Введя для этой точки силу инерции —mtflf , получим согласно равенству (85), что [c.345]
Обозначим равнодействующие всех (и внешних, и внутренних) активных сил и реакций связей, действующихjia какую-нибудь точку системы 5ft, соответственно через FI и Тогд , поскольку каждая из точек системы находится в раэновесии, а сле- [c.361]
Силы, действующие в мате- Классификация сил. В динамике, как и в риальной системе, подраз- статике, приступая К решению каждои за-деляют на внутренние и дачи, МЫ должны В первую очередь опре-внешние или на активные и делить материальную точку, или абсолютно реакции связей твердое тело, или материальную систему,
[c.255]
В динамике, как и в риальной системе, подраз- статике, приступая К решению каждои за-деляют на внутренние и дачи, МЫ должны В первую очередь опре-внешние или на активные и делить материальную точку, или абсолютно реакции связей твердое тело, или материальную систему,
[c.255]
Представим равнодействующую силу, приложенную к каждо1[ точке системы, разложенной не на активную силу и реакцию связей, а па внутреннюю и внешнюю силы по отношению ко всей системе [c.344]
На элементы конструкции действуют внешние нагрузки активные и реактивные (реакции связей), — под действием которых возникают внутренние силы силы взашлсдейстЕ ия между частицами твердого тела, препятствующие ею деформации. Как всякую системук сил, внутренние силы, распределенные в сечении нагружен)яого бруса, можно привести центру тяжести сеяния, в результате получим главный вектор R и главный момент М (R) внутренних сил в сечении. Метод сечений позволяет определить внутренние силы, возникающие в поперечных сечениях бруса, через внеииние нагрузки. [c.4]
[c.4]
Обращаем внимание, что, говоря о внутренних силовых факторах, не рекомендуется употреблять глагол действуют, лучше говорить возникают. Выскажем некоторые соображения в защиту этой рекомендации. Известно, что существуют две основные системы построения курса сопротивления материалов. Согласно первой, продольные силы, изгибающие моменты и т. д. рассматриваются как внутренние силовые факторы, согласно второй — как равнодействуюнгие внешних сил, приложенных по одну сторону от проведенного сечения. Здесь, следуя программе для техникумов, методике, принятой ведущими кафедрами вузов, мы трактуем изгибающие моменты и прочие аналогичные величины как внутренние силовые факторы. При этом естественно говорить о их возникновении под действием внешних сил подобно тому, как возникают реакции связей абсолютно жестких тел. При таком подходе нелогично приписывать внутренним силовым факторам какую-либо активную роль, скажем, говорить, что изгибающий момент вызывает изгиб бруса.
 Такой подход последовательно проведен во всей книге, и мы неоднократно подчеркиваем реактивный характер внутренних силовых факторов. Из сказанного не следует делать вывод о недопустимости иных трактовок, но принятая более логична.
[c.56]
Такой подход последовательно проведен во всей книге, и мы неоднократно подчеркиваем реактивный характер внутренних силовых факторов. Из сказанного не следует делать вывод о недопустимости иных трактовок, но принятая более логична.
[c.56]Изобразим систему вместе с действуюшими на нее внешними силами активными (Р = mig, Q = mag, G = m.g) и реакциями связей (Ni, Fi, R, Nj, Fj). Внутренние силы не показываем, так как [c.228]
Докажем необходимость и достаточность этого условия равновесия. Пусть система, на которую наложены идеальные голоно.ч-ные стационарные удерживающие связи, состоит из п точек. Обозначил через F/, равнодействующую приложенных к к-й точке активных сил, а через — равнодействующую реакций внешних и внутренних связей, наложенных на ту же точку. При равновесии системы каждая ее точка также находится в равновесии, поэтому для каждой точки можно записать условие равновесия в виде [c.267]
Система уравнений (14. 3) выражает принцип Даламбе-ра для системы материальных точек если к каждой точ ке движущейся механической системы условно приложить соответствующую силу инерции, то в любой момент движения действующие на эту точку активные силы [внешние и внутренние), силы реакций связей внешних и внутренних) и сила инерции образуют уравновешен ную систему сил.
[c.281]
3) выражает принцип Даламбе-ра для системы материальных точек если к каждой точ ке движущейся механической системы условно приложить соответствующую силу инерции, то в любой момент движения действующие на эту точку активные силы [внешние и внутренние), силы реакций связей внешних и внутренних) и сила инерции образуют уравновешен ную систему сил.
[c.281]
Оси координат и точки, относительно которых берутся моменты сил, выбираются так, чтобы не подлежащие определению неизвестные силы не входили в уравнения равновесия. Если из составленных уравнений для нерас-члененной системы определить искомые величины hj представляется возможным, то применяют метод расчленения системы на составные части. К каждой части прикладываются активные силы (внешние и внутренние), реакции отброшенных внешних и внутренних связей и силы инерции. Составляются уравнения принципа Да-ламбера для каждой части, и в результате их совместного решения находятся искомые величины. [c.284]
Чтобы избежать опасной путаницы, мы тотчас же условиися, что эта вторая классификация сил не зависит от первой. Для некоторых частных систем, как, например, для свободного твер дого тела, находящегося под действием силы тяжести и поверхностных растягивающих или сжимающих сил, обе классификации приводят к одному и тому же распределению сил в этом случае активные силы (вес и поверхностные силы) являются внешними, а реакции (силы связей твердого тела) — внутренними. Но достаточно подумать о связях, осуществляемых посредством соединенил системы, с внешними по отношению к ней телами (например, подвешенное или опертое твердое тело), а с другой стороны, о силах, происходящих не от связей, но возбуждаемых искусственными приспособлениями или возникающих в естественных физических условиях (например, ньютонианское притяжение между материальными элементами движущейся системы), чтобы видеть, что, вообще говоря, и активные силы, и силы реакции могут быть как внешними >шк и внутренними.
[c.255]
Для некоторых частных систем, как, например, для свободного твер дого тела, находящегося под действием силы тяжести и поверхностных растягивающих или сжимающих сил, обе классификации приводят к одному и тому же распределению сил в этом случае активные силы (вес и поверхностные силы) являются внешними, а реакции (силы связей твердого тела) — внутренними. Но достаточно подумать о связях, осуществляемых посредством соединенил системы, с внешними по отношению к ней телами (например, подвешенное или опертое твердое тело), а с другой стороны, о силах, происходящих не от связей, но возбуждаемых искусственными приспособлениями или возникающих в естественных физических условиях (например, ньютонианское притяжение между материальными элементами движущейся системы), чтобы видеть, что, вообще говоря, и активные силы, и силы реакции могут быть как внешними >шк и внутренними.
[c.255]
Две указанные выше классификации сил, действующих на материальную систему, играют ва>1общих теорем и последующих конкретных приложений. Не будет поэтому лишним вспомнить, что аналогичные обстоятельства имели место в статике, где сначала, разделив силы на внешние и внутренние, мы пришли к основным условиям равновесия (т. I, гл. XII), приложимым в качествь необходимых к всевозможным типам материальных систем (например, к стержневым системам, нитям и т. д., гл. XIV) и, в частности, являющимся достаточными для равновесия твердого тела (гл. Х1П) затем в общей статике (гл. XV), отправляясь от разделения сил на активные силы и реакции и присоединяя ограничительные предпо—ложения о природе связей (отсутствие трения), мы пришли, примени принцип виртуальной работы, к исключению неизвестных реакций н условий равновесия.
[c.256]
Не будет поэтому лишним вспомнить, что аналогичные обстоятельства имели место в статике, где сначала, разделив силы на внешние и внутренние, мы пришли к основным условиям равновесия (т. I, гл. XII), приложимым в качествь необходимых к всевозможным типам материальных систем (например, к стержневым системам, нитям и т. д., гл. XIV) и, в частности, являющимся достаточными для равновесия твердого тела (гл. Х1П) затем в общей статике (гл. XV), отправляясь от разделения сил на активные силы и реакции и присоединяя ограничительные предпо—ложения о природе связей (отсутствие трения), мы пришли, примени принцип виртуальной работы, к исключению неизвестных реакций н условий равновесия.
[c.256]
Мы получили таким образом теорему живых сил в дифференциал ной форме во время движения материальной системы с какими угодно связями и под действием каких угодно сил приращение, которое получает живая сила системы за какой-нибудь элементк времени, равно полной работе, совершаемой за тот же самый элемент времени всеми силами, действующими на систему (внешними и внутренними, активными и реакциями). [c.278]
В результате Л. Б. Левенсон приходит к ряду выводов. Проблема сил инерции существует, ибо ученые до сих пор не пришли к единому мнению об их сущности. Силы могут быть активными и реактивными к последним относятся силы трения, сопротивление среды, силы упругости и силы инерции. Своеобразие сил инерции заключается в следующем 1) по происхождению и действию сила инерции стоит особняком, не являясь ни внешней, ни внутренней (в узком понимании) силой 2) возникающие в одиночку (не парами) силы инерции должны быть уравновешены 3) при отсутствии физической связи, передающей ускорение, сила инерции, хотя и существует как кинематическая реакция материи, но проявить свое действие в ясном виде не может 4) при свободном движении материальной точки из-за полного отсутствия связей действие силы инерции также не может явно проявиться тогда ускоряющая сила действует непосредственно на каждую частицу тела, минуя связи, и сообщает всем частицам равные и параллельные ускорения. [c.49]
Связи, реакции связей и принцип освобождаемости в статике.
Теоретическая механика
Принцип освобождаемости.
Связи и реакции связей
Как уже упоминалось в предыдущих статьях, статика изучает условия, при которых тела и материальные точки находятся в состоянии равновесия. Казалось бы, благодаря аксиомам статики, описывающим основные свойства силового взаимодействия между телами, решение задач равновесия тел не должно представлять трудностей — неизвестные силы можно найти, зная, что они должны уравновешиваться известными силами, отсюда и ключ к решению.
Тем не менее, основная сложность при расчетах заключается в том, что силы — векторные величины, и для решения задач необходимо знать не только их скалярные размерности (модули), но и направление в пространстве, а также точки приложения. В результате получается, что каждая неизвестная сила содержит три вопроса: куда она направлена, где приложена, и какова ее величина?
Исключить некоторые неизвестные составляющие сил помогает анализ связей между телами. Как мы уже знаем, все тела и материальные точки подразделяются на свободные и связанные (несвободные). В статике чаще всего приходится решать задачи, в которых рассматривается условие равновесия связанных тел, т. е. имеющих некоторые (или полные) ограничения на перемещение в пространстве относительно других тел.
Эти ограничения называются связями.
Примерами связей, ограничивающих перемещение тела, может послужить поверхность или какая-либо опора, на которой лежит тело, жесткая заделка части тела в массив, исключающая любое его перемещение, а также гибкие и шарнирные связи, частично ограничивающие возможность тела перемещаться в пространстве.
Анализ таких связей позволяет понять, какие силовые факторы возникают в них при противодействии перемещению связанного тела. Эти силовые факторы называют силами реакции или реакциями связей (обычно их называют просто реакциями).
Силы, которыми тело воздействует (давит) на связи называют силами давления.
Следует отметить, что силы реакций и давлений приложены к различным телам, поэтому не представляют собой систему сил.
Силы, действующие на любое тело можно разделить на активные и реактивные.
Активные силы стремятся перемещать тело, к которому они приложены, в пространстве, а реактивные силы — препятствуют этому перемещению. Силы реакции связей относятся к реактивным силам.
Принципиальное отличие активных сил от реактивных заключается в том, что величина реактивных сил зависит от величины активных сил, но не наоборот. Активные силы часто называют нагрузками.
При решении большинства задач статики несвободное тело условно изображают как свободное с помощью так называемого принципа освобождаемости, который формулируется следующим образом: всякое несвободное (связанное) тело можно рассматривать как свободное, если отбросить связи и заменить их реакциями.
***
Типичные связи тел и их реакции
Рассмотрим наиболее часто встречающиеся связи, а также возникающие в них реакции при приложении нагрузок.
Идеально гладкая плоскость
Реакция идеально гладкой плоскости направлена перпендикулярно опорной плоскости в сторону тела, так как такая связь не дает телу перемещаться лишь в одном направлении — в сторону опорной плоскости, т. е. перпендикулярно ей (см. рисунок 1,а).
Если же тело находится на наклонной плоскости, то силу его тяжести G можно разложить на две составляющие, из которых одна будет направлена параллельно плоскости (Xa), другая — перпендикулярно ей (Ya). При этом первая сила будет стремиться передвигать тело по плоскости в сторону уклона, а вторая — прижимать его к плоскости (см. рисунок 1,б).
Реакция наклонной плоскости будет равна по модулю составляющей, перпендикулярной плоскости и направлена в сторону, противоположную этой составляющей, уравновешивая ее. Если тело касается плоскости одной точкой (например, шар или угол), то реакция будет приложена к этой точке тела.
В других случаях, когда тело касается плоскости некоторой поверхностью, имеет место взаимодействие посредством нагрузки, распределенной по этой поверхности (распределенной нагрузки).
Идеально гладкая поверхность
Идеально гладкая поверхность (отличается от плоскости криволинейностью) реагирует перпендикулярно касательной плоскости, т. е. по нормали к опорной поверхности в сторону тела, так как нормаль — единственное направление перемещения тела, которое не допускает данная связь (см. рисунок 1,в).
Закрепленная точка или ребро угла
В случае, если перемещение тела ограничивается закрепленной точкой или ребром угла, реакция связи направлена по нормали к поверхности идеально гладкого тела в сторону тела, так как нормаль к поверхности тела — единственное направление, движение в котором ограничено этим видом связи (см. рисунок 1,г).
Гибкая связь
Реакция гибкой связи (гибкая нить) не дает телу удаляться от точки подвеса и поэтому направлена вдоль связи от тела к точке подвеса, т. е. известны точка приложения реакции гибкой связи и ее направление. На рисунке 2 изображена гибкая связь, служащая связующим звеном между двумя стержнями и телом.
В конструкциях широкое распространение имеют связи, которые называются шарнирами. Шарнир представляет собой подвижное соединение двух тел (деталей), допускающее только вращение вокруг общей точки (шаровой шарнир) или вокруг общей оси (цилиндрический шарнир). Рассмотрим, какие реакции возникают при связывании тела с помощью шарниров.
Идеально гладкий цилиндрический шарнир
При связывании тела цилиндрическим шарниром возможно его перемещение вдоль оси шарнира и вращение относительно этой оси.
Реакция цилиндрического шарнира расположена в плоскости, перпендикулярной его оси и пересекает эту ось. Направление вектора реакции шарнира на этой плоскости зависит от направления вектора нагрузки.
Примером цилиндрического шарнира может послужить обыкновенный подшипник качения.
Идеально гладкий шаровой шарнир
В этом случае заранее известно лишь то, что реакция проходит через центр шарнира, так как тело, связанное шаровым шарниром, может поворачиваться в любом направлении относительно оси шарнира, но не может совершать никаких линейных перемещений в пространстве, т. е. удаляться от центра шарнира или приближаться к нему.
Идеально гладкий подпятник
Подпятник можно рассматривать, как сочетание цилиндрического шарнира и опорной плоскости, поэтому реакция подпятника считается состоящей из двух составляющих: Xa и Ya. При этом одна из реакций будет направлена вдоль нормали к опоре в сторону тела (как у опорной плоскости), другая — перпендикулярно оси подпятника (как у цилиндрического шарнира).
Полная реакция подпятника будет равна векторной сумме этих составляющих: Ra = Xa +Ya.
Стержень, закрепленный шарнирно
Стержень, закрепленный двумя концами в идеально гладких шарнирах и нагруженный концами (рис. 2), реагирует только по линии, соединяющей оси шарниров, т. е. вдоль своей оси (согласно III аксиоме статики). При этом реакция стержня может быть направлена и к центру шарнира (точке крепления), и от него (в зависимости от направления нагрузки), поскольку этот вид связи удерживает тело на фиксированном расстоянии, не позволяя ему удаляться или приближаться. Этим стержень принципиально отличается от гибкой связи, у которой реакция всегда направлена от точки крепления в сторону связи (гибкая связь удерживает тело только от удаления, не запрещая ему приближаться к точке крепления).
Жесткая заделка
Этот вид связи полностью лишает тело возможности перемещаться в любом направлении и вращаться относительно какой-либо оси или точки.
При жесткой заделке тела (рис. 3) в опоре возникает не только реактивная сила RA, но и реактивный момент МA.
Жесткая заделка является «темной лошадкой» при вычислениях, поскольку изначально ни направление реакций, ни их величина неизвестны, особенно если нагрузка представлена системой сил. Тем не менее, используя разложение активных сил на составляющие, последовательно можно определить и реактивную силу RA, и реактивный момент MA, действующие в жесткой заделке.
В случае, если тело связано не только жесткой заделкой, но и другим видом связи, задача становится нерешимой обычными методами статики, поскольку неизвестных реакций больше, чем возможное количество уравнений равновесия.
Пример решения задачи по определению реакций жесткой заделки приведен на этой странице.
***
Понятие бруса и балки в технической механике
В статике нередко приходится решать задачи на условие равновесия элементов конструкций, называемых брусьями.
Брусом принято считать твердое тело, у которого длина значительное больше поперечных размеров. Осью бруса считается геометрическое место (множество) центров тяжести всех поперечных сечений этого бруса.
Брус с прямолинейной осью, положенный на опоры и изгибаемый приложенными к нему нагрузками, называют балкой.
***
Распределенные нагрузки
Главная страница
Дистанционное образование
Специальности
Учебные дисциплины
Олимпиады и тесты
2. СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
13
2.1. Свободное и несвободное тело. Активные и реактивные силы
Тело называется свободным, если под действием приложенных к нему сил может перемещаться в любом направлении (рис. 2.1, а).
Тело, свобода перемещения которого ограничена другими телами, называется несвободным (рис. 2.1, б).
Тела, ограничивающие свободу перемещения данного тела, называются его связями.
При действии данного тела на связь с ее стороны возникает противодействие. Сила, с которой связь действует на данное тело, называется реакцией связи (R).
Таким образом, все силы, действующие на данное тело, можно подразделить на активные и реактивные силы.
Активными называются известные по модулю и направлению силы, с которыми на данное тело действуют другие тела, не являющиеся его связями.
Реактивные силы – это реакции связей данного тела. Реакции связей возникают только в том случае, когда тело под действием активных сил давит на связи. При этом направление реакции связи противоположно направлению, по которому связь препятствует перемещению данного тела, и зависит от типа связи.
При решении задач статики часто используется принцип освобождаемости тел от связей. Согласно этому принципу несвободное тело (рис. 2.1, б) можно рассматривать как свободное, если связи заменить их реакциями (рис. 2.1, в).
2.2. Основные типы связей
1.Абсолютно гладкая плоскость (или поверхность), где силы трения пренебрежимо малы. Реакция R гладкой плоскости (или поверхности) направлена по нормали к поверхности (рис. 2.2, а – 2.2, в).
2.Ребро. Реакция ребра R направлена по нормали к поверхности тела, опирающегося на это ребро (рис. 2.2, г).
3.Гибкая связь (трос, канат, нить). Реакция нити Т на данное тело направлена вдоль нити (рис. 2.2, д). Гибкая связь может испытывать только растяжение. При этом растягивающее усилие (натяжение) нити неизменно на всех ее участках и равно реакциям нити на соединяемые ей тела. При растяжении реакции направлены от тел, соединяемых нитью (рис. 2.2, е). Если пренебречь силами трения, то натяжение нити на всех ее участках равно величине подвешенного к ней груза (Т = Р).
4.Тонкий невесомый (незагруженный) стержень с шарнирами по концам.
Шарнир – это устройство, допускающее поворот одного тела относительно другого. Реакция тонкого стержня N на данное тело направлена по прямой, соединяющей шарнирные концы стержня (рис. 2.3, а). В зависимости от направления сил, действующих со стороны шарниров, прямой невесомый
14
стержень АВ может испытывать растяжение или сжатие (рис. 2.3, б). Усилие стержня изображается его реакциями на шарниры: при растяжении – стрелками от шарниров, а при сжатии – стрелками к шарнирам.
5. Шарнирно-подвижная опора (рис. 2.4, а). Эта связь допускает поворот данного тела вокруг оси опорного шарнира и поступательное (линейное) перемещение тела параллельно опорной плоскости. Реакция связи R проходит через центр шарнира перпендикулярно опорной плоскости. Конструкция шарнира представляет собой подшипник (цилиндрический шарнир), наружная обойма которого крепится к опоре, а внутренний валик – к данному телу. Шарнирно-подвижная опора эквивалентна одной связи 4-го типа (рис. 2.4, б).
6. Шарнирно-неподвижная опора (рис. 2.4, в). Эта связь допускает только поворот данного тела вокруг оси опорного шарнира, препятствуя любому поступательному движению тела. Реакция связи R проходит через центр шарнира, но линия действия реакции может быть какой угодно в зависимости от сил, действующих на данное тело. Таким образом, определению подлежат как модуль R, так и угол α, определяющий направление реакции. Очень часто вместо R и α определяют составляющие Х и У реакции по взаимно перпендикулярным осям х и у, после чего, используя в условиях плоской задачи зависимости (1.1) и (1.2), определяют модуль и направление реакции
R = X + У = Хi + Уj
где Х, У – проекция R на оси х, у.
R = \/ Х2 + У2 , tg α = У / Х → α
Шарнирно-неподвижная опора эквивалентна двум связям 4-го типа (рис. 2.4, г).
7.Жестко защемляющая опора (заделка). Эта связь (рис. 2.4, д)
препятствует любому поступательному и вращательному движению данного
тела. Составляющими реакции заделки А являются горизонтальная Ха, вертикальная Уа составляющие и опорный момент Ма. Заделка эквивалентна трем связям 4-го типа, оси которых не должны пересекаться в данной точке
(рис. 2.4, е).
8.Шаровой шарнир (рис. 2.4, ж). Эта связь представляет собой шар, который может вращаться внутри сферической полости. Линия действия реакции R проходит как угодно в пространстве через центр шара. Модуль и направление реакции R можно определить через ее составляющие Х, У и Z по зависимостям (1.2) и (1.3).
Активные и реактивные силы в рычажном механизме захвата при контакте ведомого звена с твёрдым телом Текст научной статьи по специальности «Механика и машиностроение»
Преимущества измерителя массового расхода и плотности, построенного на описанном принципе, следующие: он может работать на потоке среды, осуществляет измерение на всём объёме (интегральным образом), обладает весьма малым гидравлическим сопротивлением.
Как видим, решение рассмотренной задачи представляет не только теоретический интерес, но и может быть использовано при построении измерительного прибора для измерения массового
расхода и плотности жидкости.
СПИСОК ЛИТЕРАТУРЫ
1. Майоров Е. В., Онищук В. А. Об инерционном способе одновременного измерения массового расхода жидкости и её плотности // Прикладная физика. — 2005. — №6. — С. 18.
2. Лойцянский Л. Г. Механика жидкости и газа: учебник для вузов. — 7-е изд., испр. — Москва : Дрофа, 2003.
REFERENCES
1. Mayorov E. V., Onishchuk V. A. Ob inertsionnom sposobe odnovremennogo izmereniya massovogo raskhoda zhidkosti I ee plotnosti [On the inertial method of simultaneous measurement of the mass flow rate of a liquid and its density] // Applied Physics, 2005, №6, P. 18.
2. Loytsyanskiy L. G. Mekhanika zhidkosti I gaza: uchebnik dlya vuzov [Fluid and gas mechanics: a textbook for universities]. 7th ed., Corr. Moscow: Drofa, 2003.
Жиляев Олег Валентинович, аспирант кафедры «Тепловая и топливная энергетика» УлГТУ, заместитель главного конструктора, руководитель Бюро новой продукции отдела главного конструктора Научно-Производственного Общества «Новые Технологии Эксплуатации Скважин», (ООО НПО «НТЭС») г. Бугульма (Республика Татарстан), [email protected].
Поступила 28.01.2019 г.
УДК 531.1; 531.8
В. К. МАНЖОСОВ, А. А. САМСОНОВ
АКТИВНЫЕ И РЕАКТИВНЫЕ СИЛЫ В РЫЧАЖНОМ МЕХАНИЗМЕ ЗАХВАТА ПРИ КОНТАКТЕ ВЕДОМОГО ЗВЕНА С ТВЁРДЫМ ТЕЛОМ
Статья посвящена передаче движения в рычажном механизме захвата. В технологических системах такие механизмы используются для подъёма и перемещения твёрдых цилиндрических тел. Силы трения в зоне контакта ведомого звена с цилиндрической поверхностью исключают возможность разрыва связи твёрдого тела и ведомого звена.
Определено соотношение силы на ведущем звене и возникающей нормальной реакции в зоне контакта ведомого звена с цилиндрической поверхностью. Определено влияние параметров механизма на соотношение этих сил. Определяется зона, в которой отношение сил достигает наименьших значений.
Ключевые слова: рычажный механизм, механизм захвата, передача движения, силы трения, угол передачи движения, условия равновесия.
Захваты рычажного типа составляют распространённую группу устройств, удерживающих объект транспортировки за счёт контактного взаимодействия ведомого звена с объектом [1, 2].
© Манжосов В. К., Самсонов А. А., 2019
В работе [3] рассмотрена схема манипулятора для захвата и перемещения твёрдых цилиндрических тел. Исполнительный механизм (рис. 1), обеспечивающий захват, представляет собой рычажный механизм. Ведущее звено (ползун) исполнительного механизма перемещается поступательно, а ведомое звено (клешня) совершает вращательное движение в плоскости звена АВ = I (рис. 2) и клешни ОБС (обозначим эту плоскость как плоскость х-у).
Рис. 1. Механизм захвата
Рис. 2. Схема механизма в момент захвата
При захвате цилиндрических тел исполнительных механизмов как минимум три. Углы между плоскостями исполнительных механизмов определяются как ф = 2ж / п, где п — число исполнительных механизмов (п > 2).
Схема исполнительного механизма в момент контакта с объектом захвата представлена на рис. 2. При контакте точка С имеет координаты хС и ус = -к. Положение звена ОА в момент контакта определяется углом р . Расстояние от точки С до точек Б и О определяется отрезками БС= 1БС и ОС= 1С .
Положение отрезка ОС относительно вертикали определяется углом рк, положение отрезка БС относительно ОБ= 1Б определяется углом рБ .
При контакте с твёрдым телом в точке контакта (в точке С) повороту звена ОБС противодействует нормальная составляющая реакции — Я и сила трения Е = / ■ Я, где / — коэффициент трения.
Если при перемещении твёрдого тела захват удерживает его за счёт сил трения Е, то величина этих сил должна быть определена из условия надёжности захвата.
Рассекая звено АВ и используя аксиому связей, определим соотношение между движущей силой Р, действующей на ползун, и продольной силой N в поперечном сечении звена АВ. На рис. 3 представлена схема сил, действующих на ползун В и отсечённую часть звена АВ.
N,
Рис. 3. Схема сил, действующих на ползун В и отсечённую часть звена АВ
Рис. 4. Схема сил, действующих на часть звена АВ и ведомое звено (клешню) ОБС
Из условия статического равновесия сил (полагая, что связи звеньев идеальные) следует, что
N cos р-P _ 0, N _ P / cos /3. (1)
На рис. 4 представлена схема сил, действующих на отсечённую часть звена АВ и ведомое звено (клешню) ОБСв момент контакта с твёрдым телом. Из условия статического равновесия сил (полагая, что связи звеньев за исключением в зоне контакта идеальные) следует, что
N cosa-lA — Rh — F ■ xc _ 0, F _ f ■ RN _ R(h + f’ Xc ), (2)
lA cosa
где a — угол давления.
Приравнивая (1) и (2), приходим к равенству
P _ R(h + f ■ xc ) p _ (h + f ■ xc ) cos 3 _ , R ~
cos 3
L cosa
L cos a
В зависимости от угла р и длин звеньев ОА = 1А , АВ = l определяются углы / и рА (рис. 2): 1А /sin/ = l/sinp, sin3 = -ysinp, 3 = arcsin(-ysinp), рА = я-(р + /). В зависимости от lD, хС и h определяются lC , ph, pDC , lDC, pD :
(3)
(4)
lc — ‘sj Xc + h
ph _ arc sin
cos pD _
V lc J
l2 +12 -12 2l l
, Pdc (P + Ph ), lDc _л112c + lD — 2lclD cos Pdc
(pD _ arc cos
Перейдём к относительным величинам: Тогда
l_l / 1а ; xc _ xc/ 1А ; h _ h / 1А ; 1d _ 1D / 1А ;
l2 + i2 — I2
1d^1dc lc
2l l ^1d1dc
l Dc lDc / la ; l c lc / la
■ n sinp .1d1dc
R
cosa
(5)
(6)
(7)
(8)
От угла (рА зависит величина угла передачи движения от звена АВ рычагу ОВ (обозначим его как у) и величина угла давления а = ж /2 — у:
гя-рА, если р<я/2-3; \р +3, если р<я/2-
рА, если р>я/2-3;
у_.
я-(р + 3), если р>я/2-3
(9)
Координата хС точки контакта зависит от поперечных размеров объекта захвата. я /2 .
Так как a _ я / 2 — у, то cos a _ sin у и равенство (8) можно представить в виде
P _ (h + f ■ Xc ) cos 3 R sin у
(10)
На рис. 5 представлены диаграммы, характеризующие изменение углов (рА, у и ß в зависимости от угла ( . Изменение угла ( рассматривается в диапазоне от 1 до 2 радиан при следующих параметрах механизма: l = 5; lD = 1,2; xC = 1; h = 1,2.
В рассматриваемом диапазоне параметров угол ß изменяется в весьма малых пределах от 0,17 до 0,2. В этой связи угол (А = ж — (( + ß) практически линейно зависит от угла ( .
Диаграмма угла передачи движения у имеет чётко выраженный максимум при ( = 1,37. Величина угла у при этом достигает значения у = 1,57 = ж/2 . На рис. 5 затенённая зона показывает область рационального диапазона угла (, при котором целесообразно обеспечивать контакт ведомого звена (клешни) с твёрдым телом. В этом диапазоне угол передачи движения у принимает значения от 1,5 до 1,57.
Обратимся к расчётной зависимости (10), определяющей соотношение движущей силы Р и возникающей в контактной зоне реакции R, значение которой определяет силу трения F = f • R,способной удержать твёрдое тело при захвате и его перемещении.
На рис. 6 представлена диаграмма соотношения сил P/R зависимости от угла (, при котором происходит контакт ведомого звена с твёрдым телом (коэффициент трения f = 0,2). Параметры механизма захвата приняты следующими: l = 5; lD = 1,2; xC = 1; h = 1,2.
25
&
а 2
н
^
а 1,5
К
£ 1
£ 0,5
О
1 = 5; 4 = 1,2;
<Ра = 1′ h =1 7
«X у
ß /
<P, рал
1 1,1 1J2 U 1,4 L5 1,6 1,7 1,8 1,9 2 Рис. 5. Изменение углов (A, у и ß в зависимости от угла (
1.7
1,65
bi
1,Ь
ч Я 1,55
и
и Я К 1.5
а 1,45
о
н
о 1,4
о
и
1,35
1.3
Г =5: lD = хс =1; h = 1. 1 — /
/
/
£>:рад
1 1,1 и 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2 Рис. 6. Диаграмма соотношения сил Р/Лзависимости от угла р при коэффициенте трения / = 0,2
На диаграмме явно можно проследить диапазон минимальных соотношений сил P/R, который вновь попадает в область рациональных значений угла (, когда целесообразно обеспечить контакт ведомого звена (клешни) с твёрдым телом. При принятых параметрах минимальное соотношение сил P/R = 1,37. Это указывает на то, что даже в наиболее благоприятном случае значение движущей силы Р почти на 40 % превышает реакцию R в зоне контакта.
Анализируя зависимость (10), заметим, что для снижения соотношения P/R необходимо увеличивать угол ß и стремиться обеспечить значение угла у близким к ж /2. Целесообразно также стремиться к уменьшению h и xC .
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И. И. Механизмы в современной технике. Т. 1. Рычажные механизмы. — Москва : Наука, 1970. — 608 с.
2. Mannaa A. R., Akyurt M., El-Kalay A. K. Six-link Gripperfor Cylindrical Objects // Journal of Islamic Academy of Sciences 3:1, pp. 6- 10, 1990.
3. Самсонов А. А. Манипуляторы для дистанционного перемещения грузов // Сб. материалов 52-й НТК УлГТУ. Ч. 1. — Ульяновск :УлГТУ, 2018. — С. 132 — 135.
REFERENCES
1. Аrtobolevskij I. I. Mekhanizmy v sovremennoj tekhnike. Mechanisms in modern technology. T. 1. Lever mechanisms. Moscow: Science, 1970, 608 p.
2. Mannaa A. R., Akyurt M., El-Kalay A. K. Six-link Gripperfor Cylindrical Objects // Journal of Islamic Academy of Sciences 3:1, pp. 6-10, 1990.
3. Samsonov А. А. Manipulyatory dlya distantsionnogo peremeshheniya gruzov [Manipulators for remote movement of goods] // Sb. materialov 52-j NTK UlGTU. [Materials of the 52nd NTK UlSTU]. CH. Part 1. Ulyanovsk: UlSTU, 2018, pр. 132-135.
Манжосов Владимир Кузьмич, доктор технических наук, профессор, профессор кафедры «Промышленное и гражданское строительство» Ульяновского государственного технического университета. Имеет статьи, монографии, изобретения в области динамики машин, моделирования процессов удара [e-mail: [email protected] ].
Самсонов Александр Анатольевич, аспирант кафедры «Промышленное и гражданское строительство» Ульяновского государственного технического университета. Имеет статьи и патенты в области создания механизмов различного технологического назначения [e-mail: [email protected]].
Поступила 11.02.2019 г.
Активные силы — Большая Энциклопедия Нефти и Газа, статья, страница 1
Активные силы
Cтраница 1
Активные силы, действующие на систему, в общем случае могут зависеть не только от положений и скоростей точек системы и времени, но и от некоторых параметров. [1]
Активные силы не зависят от связей, а значит, и от реакций связей, наложенных на твердое тело. [2]
Активные силы — понятие, связанное со вторым и третьим законами Ньютона. [4]
Активные силы, приложенные к каждой материальной точке движущейся системы и реакции связей, ограничивающих ее движение, уравновешиваются силами инерции. [5]
Активные силы можно также условно назвать заданными силами; это те из сил, приложенных к механической системе, которые сохраняются, если связи мгновенно исчезнут. Реакции связен называют иногда пассивными силами; они заранее неизвестны и зависят не только от тех материальных приспособлений, которые реализуют связи, но и от активных сил и от движения системы. [6]
Активные силы вызывают ускорение материальных тел и реакции Силы не могут вызывать ускорение и появляются при сил. [7]
Активные силы, действующие на катки в виде колес ( рис. 66), кроме силы тяжести Р обычно состоят из силы Q, приложенной к центру колеса параллельно общей касательной в точке А, и пары сил с моментом L, стремящейся катить колесо, называемое в этом случае ведомо-ведущим. Если L 0, а 2 0, то колесо называют ведомым; если L O, a 2 0, то ведущим. Ведомо-ведущими являются колеса локомотива, идущего вторым в составе поезда. [8]
Активные силы можно также условно назвать заданными силамщ это те из сил, приложенных к механической системе, которые сохраняются, если связи мгновенно исчезнут. [9]
Активные силы, например центробежная сила при криволинейном течении и гидростатическая подъемная сила в течении с переменной в вертикальном направлении плотностью, также очень сильно влияют на переход ламинарного течения в турбулентное. [10]
Активные силы, действующие на катки в виде колес ( рис. 66), кроме силы тяжести F обычно состоят из силы Q, приложенной к центру колеса параллельно общей касательной в точке А, и пары сил с моментом L, стремящейся катить колесо, называемое в этом случае ведомо-ведущим. Если L 0, a Q Q, то колесо называют ведомым; если L O, a Q-Q, то ведущим. Ведомо — ведущими являются колеса локомотива, идущего вторым в составе поезда. [11]
Активные силы вызывают деформацию. Реактивные силы препятствуют перемещению частиц металла при деформации. В процессе деформации тела приложенные к нему внешние силы вызывают в нем возникновение внутренних сил, стремящихся восстановить первоначальную форму и размеры тела. Это происходит вследствие изменения межатомных расстояний, следовательно, изменение величины силы взаимодействия приводит к нарушению межатомного равновесия. Внешние силы встречают противодействие внутренних сил. Эти внутренние силы вызывают напряжения в теле. Напряжением называют интенсивность внутренней силы, приходящуюся на единицу площади сечения. Напряжение на схемах изображают векторами — стрелками, показывающими направление действия сил. [13]
Активные силы принято называть нагрузками. По способу приложения нагрузки бывают объемные и поверхностные ( распределенные и сосредоточенные), по характеру изменения в процессе приложения — статические, динамические и повторно-переменные, по продолжительности действия — постоянные и временные. [14]
Активные силы в высокотемпературной области деформации вызывают знак, противоположный знаку деформаций, которые образуются в процессе наложения сварных швов. Приложением активных сил можно заметным образом уменьшить величину остаточной деформации, устранить ее совершенно и получить даже деформации знака, обратного знаку тех деформаций, которые получаются при сварке в ненагруженном состоянии. [15]
Страницы: 1 2 3 4
Активные реактивные силы — Большая Энциклопедия Нефти и Газа, статья, страница 1
Активные реактивные силы
Cтраница 1
Активные и реактивные силы являются внешними силами ( нагрузками), вызывающими деформацию изгиба в балке. [1]
Принцип Даламбера формулируется так: активные и реактивные силы, действующие на материальную точку, вместе с силами инерции образуют систему взаимно уравновешенных сил, удовлетворяющую всем условиям равновесия. [2]
Как было сказано выше, внешними нагрузками балки являются активные и реактивные силы и моменты. [3]
Решая задачу первым способом, мы учитывали только фактически действующие на тело активные и реактивные силы и составили шесть всеобщих уравнений движения ( 169) и ( 192), связывающих проекции этих сил с массами и с проекциями ускорений частиц тела. [4]
Для определения внутренних силовых факторов применим метод сечений, причем изображать балку будем только одной линией — осью, к которой приложены активные и реактивные силы. [5]
Пусть все активные и реактивные силы и массы механизма приведены к одному из его звеньев. [6]
Расчеты с учетом инерционных нагрузок ведутся известным из теоретической механики методом кинетостатики, основанном на принципе Даламбера. Согласно этому принципу все активные и реактивные силы, приложенные к телу, вместе с силами инерции образуют систему взаимно уравновешенных сил, удовлетворяющую всем условиям равновесия. Таким образом, задачи динамики и сопромата решаются методами статики. [7]
Страницы: 1
Силы действия и реагирования: закон и примеры — стенограмма видео и урока
Пары сил и третий закон Ньютона
Третий закон Ньютона гласит, что силы всегда действуют парами. Рассмотрим пример мальчика, играющего с игрушкой для собаки, и его иллюстрации. Мальчик действует на игрушку собаки, а игрушка собаки — на мальчика. Эти две силы создают пару взаимодействия .Силы всегда приходят парами, как в этом примере. Рассмотрим мальчика (A) как одну систему, а игрушку (B) как другую. Какие силы действуют на каждую из двух систем? Представьте себе мальчика, тянущего за игрушкой, а игрушку вытаскивают из мальчика. Вы можете видеть, что каждая система воздействует на другую. Две силы — F (A на B) и F (B на A) — это силы взаимодействия между ними. Обратите внимание на симметрию: A на B и B на A.
Силы F (A на B) и F (B на A) представляют собой пару взаимодействий , которая представляет собой набор двух сил, которые направлены в противоположных направлениях, имеют равные величины и действуют на разные объекты.Иногда пару взаимодействия называют парой действие-реакция. Это может означать, что одно вызывает другое; однако это не так. Например, сила, с которой мальчик тянет игрушку, не заставляет игрушку тянуть мальчика. Эти две силы либо существуют вместе, либо не существуют вовсе.
Не может быть единственной силы, действующей в одиночку. Силы приходят только в парах действие-противодействие. Тщательно продумайте, как двигать скейтборд ногой. Ваша ступня отталкивается от земли. Сила действует на землю.Однако вы двигаетесь, поэтому сила должна действовать и на вас. Почему вы переезжаете? Какая сила действует на вас? Вы двигаетесь, потому что сила воздействия вашей ноги на землю создает силу реакции земли на вашу ногу. Вы «чувствуете» землю, потому что чувствуете силу реакции, давящую на вашу ногу. Сила реакции — это то, что заставляет вас двигаться, потому что она действует на вас.
Третий закон движения Ньютона объясняет, что силы всегда действуют парами действие-противодействие.Третий закон гласит, что для каждой силы действия существует равная и противоположная сила противодействия. Представьте, что вы попадаете в бейсбольный мяч. Бита оказывает на мяч силу. Это сила действия. Мяч оказывает на биту одинаковую и противоположную силу. Это сила реакции. Такая пара взаимодействия — еще один пример третьего закона Ньютона. Бейсбол заставляет биту двигаться в одном направлении, а бита — в противоположном. Эти две силы создают пару взаимодействия на разных объектах, они равны по силе и противоположны по направлению.Сила (F) А (бита) на В (мяч) равна по величине и противоположна по направлению силе В на А: F (А на В) = — F (В на А).
Ньютон понял, что если один объект тянет за другой, второй объект также тянет назад первый объект. Если один объект толкает другой, второй толкает первый объект. Другими словами, на каждое действие одной силы есть противодействие другой силы.
Парные диаграммы действие-реакция
При сортировке сил действия и противодействия полезно рисовать диаграммы.Нарисуйте каждый объект отдельно от другого. Представьте каждую силу в виде стрелки в соответствующем направлении. Рекомендации в этой таблице могут помочь вам разобраться в силах действия и противодействия.
Рассмотрим ситуацию, когда вы держите книгу в руке. Вы можете нарисовать одну схему для себя и одну для книги. Есть ли пары взаимодействия? Вы можете использовать стрелки для обозначения силы и направления силы. В этом случае пара взаимодействия — это сила книги на руке и сила руки на книге.
Примеры действия-реакции
Мы уже рассмотрели некоторые примеры. Но каковы еще примеры действия-противодействия? Посмотрим на ракетный двигатель. Третий закон Ньютона объясняет, как работают ракетные двигатели. Горячие газы вытесняются из задней части ракеты. Это сила действия. Газы действуют на ракету с равной и противоположной силой. Это сила реакции. Реакция толкает ракету вверх и отрывает ее от земли.
Также подумайте, что происходит, когда дайвер прыгает на трамплин? Доска отскакивает и поднимает дайвера в воздух.Сила воздействия на доску со стороны дайвера вызывает силу реакции со стороны доски на дайвера. Сила дайвера на доске равна силе, действующей на доску, и противоположна ей. Подумайте о том, как сила трамплина влияет на работу дайвера. Чем больше сила приложена к трамплину, тем выше будет прыжок.
Наконец, подумайте о том, как команда экипажа использует третий закон движения Ньютона для перемещения лодки.Когда весло опускается в воду, вода оказывает одинаковое усилие на обе стороны весла. Однако, когда участники тянут весла, поверхность их плоской стороны отталкивается от воды. Вода отталкивает весла с равной и противоположной силой. Лодка движется в направлении, противоположном веслам, с силой, равной силе весла, когда они отталкиваются от воды. Лодка движется, потому что силы против нее неуравновешены. Как вы думаете, почему важно, чтобы все члены экипажа одновременно тянули весла? Что ж, если члены экипажа не работают вместе, их собственные силы будут уравновешивать друг друга, уменьшая общую несбалансированную силу, которую они пытаются достичь.
Вращающийся водяной спринклер — еще один пример сил действия и противодействия. Вода нагнетается из спринклера. Это действие. Реакция — это движение разбрызгивателей от воды. Вы чувствуете такую же реакцию, когда держите водяной шланг и быстро включаете воду. Возможно, вы видели, как пожарные изо всех сил пытаются контролировать пожарный шланг. Когда вода покидает шланг, его выталкивают назад. Эта реакция затрудняет обращение со шлангом.
Осьминоги и кальмары также используют третий закон движения Ньютона.Осьминог или кальмар передвигается, сначала втягивая воду в свое тело. Затем животное с силой выдавливает воду из своего тела через отверстие за головой. Сила вытесненной воды перемещает животное в противоположном направлении.
Вот последний пример, когда мы думаем о третьем законе Ньютона и о том, что силы действуют в противоположных направлениях; вы только что надули воздушный шар. Сначала держите его отверстием вниз и отпустите. В каком направлении движется воздушный шар? При открытии вниз воздушный шар движется вверх.Снова надуйте шар, держите его горизонтально и отпустите. В каком направлении движется воздушный шар? Воздушный шар будет двигаться горизонтально от конца, из которого выходит воздух. Как бы вы объяснили, почему оба шара не движутся в одном направлении? Направление движения противоположно направлению выходящего воздуха.
Итоги урока
Силы всегда действуют парами. Третий закон Ньютона гласит, что для каждой действующей силы существует равная и противоположная сила противодействия.Пары действие-реакция можно увидеть во всех сферах жизни, от бейсбола и скейтбординга до морских животных и ракетных кораблей. При различении силы действия и противодействия вы можете рассмотреть возможность рисования диаграммы, которая иллюстрирует объекты, на которые действует сила, и направление этих сил.
Третий закон движения Ньютона
- Для каждой силы воздействия существует равная и противоположная сила реакции
- Также называются парами действие-реакция
- Парная диаграмма действие-реакция иногда полезна для определения силы действия и противодействия
Результаты обучения
Закончив, вы сможете:
- Вспомнить третий закон движения Ньютона
- Объясните взаимосвязь между силами действия и противодействия
- Приведите пример пары действие-противодействие
ньютонов — Реактивная сила на двух объектах с центральными силами
У меня есть путаница с реактивными силами, в том, как они действуют, и я надеюсь подчеркнуть свое замешательство с некоторыми (очень) плохо нарисованными мной рисунками.
Насколько я понимаю (вероятно, неверно), реактивная сила третьего закона Ньютона — это вектор силы, равный по величине и противоположный по направлению приложенной силы. В случае объекта, совершающего круговое движение, ось ощущает внешнюю силу от вращающегося тела. Если я стреляю из пистолета, сила выстрела отталкивает меня (отсюда и удар ногой). У пушек есть колеса не зря. Насколько я понимаю, это показано на изображении, которое я вырезал, но на нем изображен человек, бьющий кого-то в лицо, и соответствующие силы в результате: Я не совсем уверен, совпадает ли $ F_ {face} $ с нормальной силой, но силы должны быть сбалансированы, так как после контакта кулак перестает двигаться и испытывает шок (точно так же, как удар по черепу может сломать тебе руку).Нормальная сила, или просто $ F_ {face} $ — это сила реакции от лица к лицу в результате самого удара. По крайней мере, так я считаю.
Это понимание реактивных сил причиняет мне боль сейчас, когда я рассматриваю следующий сценарий: два объекта чувствуют центральные силы в результате друг друга (пусть центральной силой будет гравитация).
На втором плохом рисунке у меня есть и $ A $, и $ B $, оказывающие друг на друга силу. $ A $ чувствует силу $ F_ {ab} $ (сила на $ A $ в результате $ B $), в то время как $ B $ ощущает $ F_ {ba} $ (сила на $ B $ в результате $ A $) .Пусть $ F_ {ab} = -F_ {ba} $.
Силы с буквой R впереди являются реактивными — и я построил их из ошибочной необходимости, которую я не могу строго опровергнуть. Если $ A $ тянет за $ B $, то по третьему закону Ньютона $ B $ должен тянуть за $ A $, точно так же, как лицо ударяет кулаком, как кулак ударяет по лицу. Это утверждение объясняет принудительное воздействие $ RF_ {ba} $ на $ A $, и та же ошибочная логика применяется к $ B $ и $ RF_ {ab} $. Может ли кто-нибудь выделить ключевые недоразумения, которые вызывают у меня этот странный ход мыслей?
Модель сил поясничного отдела позвоночника, предназначенная для анализа, с активными и…
Контекст 1
… при создании биомеханической модели, которая представляет силы, действующие на позвоночник, было сделано несколько предположений. Во время определенной физической нагрузки положение туловища будет изменено, скорее всего, в прогрессивном направлении или просто согнуто вперед на угол?, Что вызовет реакцию тела для стабилизации туловища. Этот ответ вызовет сжимающие силы в поясничном отделе позвоночника за счет сокращения мышц живота и спины, как показано на рисунке 2, вызывая повышение внутрибрюшного давления (ВБД), а также давления в мышцах спины (BMP), которое создается жесткостью сокращенных мышц спины. .BMP зависит от уровня сокращения мышц спины, и гипотетически целью является обеспечение механической поддержки. Обе силы давления зависят от размера области, на которую они действуют, они считаются сконцентрированными как результирующие силы в центре каждой области поясничного позвонка и ориентированы перпендикулярно оси позвоночника для простоты анализа. Кроме того, внутрибрюшная полость упрощена и показана эллиптической, что на самом деле, скорее всего, не так. Поясничный сегмент туловища, показанный на Рисунке 3, упрощен, с учётом сил, возникающих во время физического эксперимента.Внешние силы имеют отношение к результирующим силам, которые …
Контекст 2
… на поясничном отделе позвоночника и по величине напряжения, которое они создают, но в целях универсального использования этой модели их величина и направление не соответствуют не имеет первостепенного значения. Они включены в силы поперечного сечения наряду с силами массы верхней и нижней части тела (относительно площадей поперечного сечения). На рисунке 3 представлена модель сил поясничного сегмента позвоночника, изолированная от остального тела.F R, F S и M R — силы реакции на нижнем сечении поясничного отдела позвоночника, F C, F L1 и M L1 — активные силы на верхнем сечении поясничного отдела позвоночника, а G — массовая сила объема поясничного отдела позвоночника. IAP и BMP представляют собой результирующие силы для каждого позвоночного, вызванные ими. Вектор силы тяжести отмечен g. Если нижняя часть зафиксирована, как предполагалось, то F C, F L1 и M L1 состоят из всех внешних и мышечных сил, индуцированных в этой области. Предполагается, что динамические силы равны нулю, поскольку система должна сначала преодолеть статическое равновесие.Также предполагается, что нижняя часть тела зафиксирована. Диапазон движений поясничного отдела позвоночника 72 градуса при фиксированном тазе. Во время повседневной деятельности исправить таз невозможно, но это не входит в объем данного анализа. Уравнения статического равновесия для нашей модели в осевом и перпендикулярном направлениях дают два важных …
ReaxFF / AMBER — модель гибридного реактивного / нереактивного силового поля для моделирования молекулярной динамики
J Chem Theory Comput. Авторская рукопись; доступно в PMC 2021 25 мая.
Опубликовано в окончательной редакции как:
PMCID: PMC8145783
NIHMSID: NIHMS1703862
Али Рахнамун
Кафедра химии и кафедра биохимии и молекулярной биологии, Университет штата Мичиган, Ист-Лансинг, 48824-1322, Мичиган Соединенные Штаты;
Mehmet Cagri Kaymak
Департамент компьютерных наук и инженерии, Университет штата Мичиган, Ист-Лансинг, Мичиган 48824-1322, США
Мадушанка Манатунга
Департамент химии и факультет биохимии и молекулярной биологии, Университет штата Мичиган, Восточный Лансинг, Мичиган, 48824-1322, США;
Андреас В.Götz
Суперкомпьютерный центр Сан-Диего, Калифорнийский университет Сан-Диего, Ла-Хойя, Калифорния 92093-0505, США;
Адри К. Т. ван Дуин
Кафедра машиностроения, Государственный университет Пенсильвании, Юниверсити Парк, Пенсильвания 16802, США;
Kenneth M. Merz, Jr.
Кафедра химии и кафедра биохимии и молекулярной биологии, Университет штата Мичиган, Ист-Лансинг, Мичиган 48824-1322, США;
Хасан Метин Актулга
Департамент компьютерных наук и инженерии, Университет штата Мичиган, Ист-Лансинг, Мичиган 48824-1322, США;
Али Рахнамун, кафедра химии и кафедра биохимии и молекулярной биологии, Университет штата Мичиган, Ист-Лансинг, Мичиган 48824-1322, США;
Авторы, отвечающие за переписку: Кеннет М.Merz, Jr. — кафедра химии и кафедра биохимии и молекулярной биологии, Университет штата Мичиган, Ист-Лансинг, Мичиган 48824-1322, США; moc.liamg@1zremk, ude.usm@ekrjzrem, Хасан Метин Актулга — Департамент компьютерных наук и инженерии, Университет штата Мичиган, Ист-Лансинг, Мичиган 48824-1322, США; ude.usm@amhAbstract
Комбинированные квантово-механические / молекулярно-механические (КМ / ММ) модели с использованием полуэмпирических методов и ab initio методов широко освещались в последние несколько десятилетий.Было показано, что эти методы способны обеспечить уникальное понимание целого ряда проблем, но они по-прежнему ограничены относительно короткими временными масштабами, особенно в моделях QM / MM, использующих методы ab initio . Промежуточный подход между моделью, основанной на КМ и классической механикой, может помочь заполнить этот временной промежуток и облегчить изучение ряда интересных проблем. Реактивные силовые поля представляют собой промежуточный подход, исследуемый в этой статье. Широко используемой реактивной моделью является ReaxFF, которая в значительной степени применяется к задачам материаловедения и обычно используется как автономная (т.е., вся система моделируется с помощью ReaxFF). Мы сообщаем о гибридном инструменте молекулярной динамики (MD) ReaxFF / AMBER, который представляет возможности ReaxFF для регистрации разрыва и образования связей в программном пакете AMBER MD. Этот инструмент позволяет нам изучать локальные реактивные события в больших системах за небольшую часть вычислительных затрат моделей QM / MM. Мы описываем реализацию ReaxFF / AMBER, проверяем эту реализацию, используя сольватированную в воде молекулу бензола, и сравниваем ее характеристики с рядом аналогичных подходов.Чтобы проиллюстрировать прогностические возможности ReaxFF / AMBER, мы провели исследование перегруппировки Клайзена в водном растворе. Впервые для ReaxFF мы смогли использовать потенциал средней силы AMBER (PMF) для проведения исследования PMF этой органической реакции. Возможность фиксировать локальные реакции в больших системах с использованием комбинированного ReaxFF / AMBER открывает ряд проблем, которые можно решить с помощью этой модели для решения как химических, так и биологических процессов.
Графический реферат
1.ВВЕДЕНИЕ
Точное моделирование химии относительно больших и сложных систем в достаточно длительных временных масштабах важно для инструментов вычислительного атомистического моделирования. Моделирование классической молекулярной механики (ММ) оказалось полезным для изучения сложных систем, в которых не происходит разрыва или образования связей. В таких методах эмпирические силовые поля (EFF), которые могут описывать взаимосвязь между геометрией и энергией системы с набором относительно простых потенциальных функций, использовались для описания многих систем вокруг их равновесной конфигурации.Однако методы, основанные на EFF, не могут моделировать химические реакции из-за жестких требований к связности таких методов. Методы квантовой механики (QM) могут смягчить ограничения методов на основе EFF, такие как образование или разрыв связей и флуктуации заряда из-за изменений геометрии. Однако модели QM обычно применяются к фрагментам областей, участвующих, скажем, в ферментативной реакции, что ограничивает возможность исследования влияния воздействия окружающей среды. Хотя методы, основанные на КМ, могут быть очень точными при прогнозировании событий химической реакции, они по-прежнему ограничиваются небольшими системами, моделируемыми в коротких временных масштабах.
Гибридные методы квантовой механики / молекулярной механики (QM / MM) были разработаны для объединения лучших характеристик моделей EFF и QM для решения ряда химических проблем. 1,2 В методах QM / MM вся система делится на две отдельные зоны QM и MM. Зона QM — это химически активная область, которая обрабатывается рядом методов QM, а остальная часть системы — это зона MM, которая обрабатывается с помощью EFF. С момента появления метода QM / MM были реализованы различные подходы, и этот метод нашел широкое применение для работы со сложными системами в реалистичных средах из-за значительного снижения вычислительных затрат по сравнению с чистыми методами QM. 3–7 В пакете AMBER MD уже давно поддерживаются различные инструменты моделирования QM / MM. 8,9 Некоторые методы QM, включая полуэмпирическое пренебрежение двухатомным перекрытием (NDDO) и плотно-функциональным плотным связыванием (DFTB), являются встроенными (т. Е. внутреннее ) и изначально поддерживаются в AMBER. 10,11 Более продвинутые методы QM поддерживаются через интерфейс интеграции на основе файлов с внешними пакетами программного обеспечения QM. 12,13
Несмотря на очень инновационные методы, алгоритмические улучшения и быстрые реализации, вычислительные затраты области QM по-прежнему остаются фактором, ограничивающим скорость при моделировании QM / MM.Поле реактивной силы (ReaxFF) — это потенциал, основанный на концепции длины связи / порядка связи, который объединяет методы QM и MM с точки зрения функциональности и вычислительных затрат. Важно отметить, что ReaxFF обеспечивает разумное приближение реактивных явлений при вычислительных затратах, сопоставимых с методами MM. В этой статье мы сообщаем о гибридном инструменте ReaxFF / AMBER MD, который представляет возможности ReaxFF для отслеживания разрыва и образования связей в программном пакете AMBER MD. Этот инструмент позволяет нам изучать локальные реактивные события в больших системах за небольшую часть вычислительных затрат моделей QM / MM.
Еще одна серьезная проблема с атомистическим моделированием состоит в том, что химические реакции через переходные состояния могут происходить в масштабе времени, который не может быть достигнут с помощью обычного молекулярно-динамического моделирования. Поэтому для определения переходного состояния химической реакции используются подходы, основанные на расширенных методах отбора проб, с использованием методов QM / MM. Зонтичный отбор проб 14 — один из наиболее известных усовершенствованных методов отбора проб, который можно легко использовать в новом инструменте ReaxFF / AMBER. Мы используем его здесь, чтобы наметить профиль реакции перегруппировки Клейзена в качестве валидационного исследования.
2. ПРЕДЫСТОРИЯ О REAXFF
ReaxFF — это классическая модель ММ по духу, которая явно моделирует химические реакции на основе концепции длины связи / порядка связи и динамического распределения зарядов. Подобно нереактивным моделям ММ, ReaxFF состоит из двух наборов терминов: связанных и несвязанных (ван-дер-ваальсовых и электростатических взаимодействий). Однако ReaxFF допускает образование и диссоциацию связей и, следовательно, имеет значительно отличающиеся условия связывания, чем классические потенциалы.
Чтобы проиллюстрировать философию метода, мы описываем определение энергии связи с использованием порядков связи для углерода и водорода (другие элементы также зависят от их конкретных свойств), в то время как структура и определение остальных терминов можно найти в оригинальном описании ReaxFF. 15 Тип одиночного атома в ReaxFF определяет каждый элемент, например, нет sp , sp 2 или sp 3 гибридизированных атомов углерода, а есть только один тип атома углерода.Энергия связи ( E связь , уравнение 1) описывается как функция сигмы (BOijσ), первая π (BOijπ) и второй π (BOijππ) ордера на облигации, а также соответствующие параметры D e , p be 1 и p bc 2 параметров. Сами различные порядки связей (BOijσ, BOijπ, BOijππ) вычисляются с использованием попарного расстояния ( r ij ) между атомами i — j , идеальных расстояний связи (r0σ, r0π, r0ππ) для типы атомов i и j , а также параметры силового поля p bo [1–6] , как показано в уравнении 2.Все три члена в уравнении 2 рассматриваются для связи между двумя атомами углерода, в то время как только первый член используется для связи σ , которая образуется между атомом углерода и атомом водорода. Однако представление на основе попарного расстояния даст небольшие порядки связи между 1 и 3 атомами, что приведет к завышению порядка связи между соответствующими атомами. Коррекция порядка облигаций ( BO ij в уравнении 3) применяется для минимизации дальних порядков облигаций для таких ситуаций, где Δi ′ (уравнение 4) — отклонение нескорректированного суммирования порядков облигаций от валентности. состояние атома (например,g., углерод и водород имеют валентности четыре и один соответственно).
Ebond = −Deσ⋅BOijσ⋅exp [pbe1 (1- (BOijσ) pbc2)] — Deπ⋅BOijπ − Deππ⋅BOijππ
(1)
BOij ′ = BOijσ + BOijπ + BOijππ = exp [pbo1⋅ ( rijroσ) pbo2] + exp [pbo3⋅ (rijroπ) pbo4] + exp [pbo5⋅ (rijroππ) pbo6]
(2)
BOij = BOij′⋅f1 (Δi ′, Δj ′) ⋅f4 (Δi ′, BOij ′) ⋅f5 (Δj ′, BOij ′)
(3)
Δi ′ = — Vali + ∑j = 1соседей (i) BOij ′
(4)
Во время моделирования MD, порядки связи оцениваются на каждом временном шаге и используются для определения атомной связности в пределах заранее определенного отрезка расстояния (обычно 5 Å).Временной шаг 0,25 фс может использоваться для большинства симуляций, в то время как меньший временной шаг необходим для исследований при более высоких температурах (> 1500K). Кривые энергии непрерывны на протяжении всего процесса моделирования, даже в областях, связанных с образованием / разрывом связи, где благоприятные реакции могут происходить автоматически без каких-либо ограничений. Это обеспечивается включением других условий, связанных с порядком выпуска облигаций (см. Уравнение 5). Углы соединения ( E val ) и скручивания ( E tor ) оцениваются с использованием аналогичных соображений относительно порядка соединения.В потенциале порядка связи атомы часто не достигают своих оптимальных координационных чисел. Следовательно, ReaxFF требует дополнительных абстракций, таких как одиночная пара ( E lp ), коррекция избыточной / недостаточной координации ( E более и E менее ), штраф за 3 тела ( E pen ) для систем с двумя двойными связями, разделяющими атом, член трехчастичного сопряжения ( E coa ), поправка на C 2 ( E C2 ), поправка на энергию тройной связи ( E тройной ) и 4-элементное спряжение ( E конъюнктура ).Возможности резюмируются ниже. Подробные выражения для каждого термина можно найти в литературе. 15
Эсистема = Ebond + Elp + Eover + Eunder + Eval + Epen + Ecoa + EC2 + Etriple + Etors + Econj + EH -bond + EvdWaals + ECoulomb
(5)
Чтобы предотвратить скачки энергии во время образования / диссоциации связи, в ReaxFF существуют несвязанные взаимодействия между каждой парой атомов (даже для 1–2, 1–3 взаимодействий). Электростатические взаимодействия представлены экранированным кулоновским членом, а взаимодействие Ван-дер-Ваальса использует экранированный потенциал Морзе для предотвращения нереалистичных значений на очень коротких расстояниях.Важным и дорогостоящим в вычислительном отношении предшественником электростатических взаимодействий является необходимость динамического определения частичных зарядов на каждом этапе MD, что достигается с помощью моделей заряда (таких как QEq 16 и EEM 17 ), которые требуют решения линейной системы. уравнений. Полученная формула является сложной, но очень гибкой и переносимой. Это позволило ReaxFF широко применять для решения широкого круга сложных задач. Первоначально разработан для углеводородов; 15 Метод ReaxFF широко использовался для исследования сложных систем в широком диапазоне приложений, включая биологические системы, 18–22 материалы, 23–29 катализаторы, 30,31 горение и батареи. 32
В дополнение к исходной программе ReaxFF на основе Fortran, 15 ReaxFF также доступен в пакете Purdue Reactive Molecular Dynamics (PuReMD) с открытым исходным кодом 33,34 и интегрирован в большой открытый исходный код. -масштабный атомно-молекулярный массово-параллельный симулятор (LAMMPS). 35 Метод ReaxFF также доступен в других важных средах моделирования, включая программу Amsterdam Density Functional (ADF) 36 и Materials Studio, выпущенную Biovia по лицензии (https: // www.3dsbiovia.com), а также Nanohub (http://www.nanohub.org).
3. ИНТЕГРАЦИЯ REAXFF / AMBER
Подобно методам QM / MM, в методе ReaxFF / AMBER атомы делятся на три категории: (i) атомы ReaxFF, которые включают все атомы в химически реактивной области и обрабатываются реализация ReaxFF, (ii) переходные атомы ReaxFF / MM, которые включают все атомы в пределах определенной границы области ReaxFF и обрабатываются совместно ReaxFF и AMBER, и (iii) атомы MM, которые включают все оставшиеся атомы и являются обрабатывается исключительно AMBER.Эти категории проиллюстрированы сферическими формами, но эти области, очевидно, могут иметь любую форму. Далее мы опишем реализацию метода ReaxFF / AMBER.
ReaxFF / AMBER регионов в реализации интеграции.
3.1. Реализация.
AMBER — это драйвер моделирования в интеграции ReaxFF / AMBER MD. После того, как AMBER классифицирует атомы по соответствующим группам, он отправляет всю необходимую информацию для атомов ReaxFF и ReaxFF / MM в программу ReaxFF.Инструмент ReaxFF / AMBER в настоящее время использует интерфейс внешней модели; то есть необходимые передачи данных между ReaxFF и AMBER выполняются с использованием файлового обмена данными. Поэтому после того, как AMBER завершает запись файлов обмена данными, он запускает программу ReaxFF как внешний двоичный файл и ожидает своих выходных файлов. Затем программа ReaxFF запускает непериодическое моделирование с нулевым шагом для расчета динамических зарядов, энергии и сил на атомах ReaxFF и ReaxFF / MM. По завершении он записывает эту информацию обратно в другой файл, который, наконец, считывается AMBER для завершения вычислений энергии и силы для областей ReaxFF / MM и MM.
При реализации интерфейса между программами ReaxFF и AMBER мы приняли следующую процедуру для успешной гибридной модели:
Рассчитаны динамические заряды на атомах ReaxFF под действием атомов ReaxFF / MM со статическими зарядами.
Все взаимодействия ReaxFF (как указано в уравнении 5 выше) между парами ReaxFF – ReaxFF рассчитываются без каких-либо изменений.
Электростатические взаимодействия между парами атомов ReaxFF (с динамическим зарядом) -ReaxFF / MM (со статическим зарядом) рассчитываются ReaxFF.
Ван-дер-Ваальсовы взаимодействия между парами атомов ReaxFF – ReaxFF / MM обрабатываются AMBER (например, с использованием потенциала Леннарда-Джонса).
Взаимодействия между парами MM-ReaxFF / MM и MM-MM обрабатываются AMBER как обычно.
Следует отметить, что у текущего инструмента ReaxFF / AMBER есть некоторые ограничения. Теперь можно изучать только системы с нековалентными связями между областями ReaxFF и ReaxFF / MM. Кроме того, на данный момент можно использовать только параллелизм с общей памятью.Тем не менее, как мы продемонстрируем ниже, текущая реализация служит доказательством осуществимости и преимуществ этого подхода.
3.2. Динамические заряды с использованием модифицированного метода выравнивания электроотрицательности (mEEM).
Поскольку мы позволяем статически заряженным ММ и атомам переходной области поляризовать атомы ReaxFF, модель динамического заряда, используемая ReaxFF, должна быть изменена. Как упоминалось ранее, ReaxFF может использовать метод выравнивания зарядов (QEq) или выравнивания электроотрицательности (EEM) для определения зарядов.Наша текущая реализация основана на EEM. Прежде чем описывать необходимые модификации, мы кратко обсудим модель заряда EEM, которая в настоящее время используется ReaxFF / AMBER.
Модель заряда EEM 29 основана на принципе, согласно которому заряды должны распределяться по атомам, чтобы удовлетворять ограничениям как для суммарного заряда системы, так и для уравновешенной электроотрицательности атомов. Пусть заряды атомов равны q = ( q 1 , q 2 ,…, q n ), а позиции будут R = ( r 1 , r 2 ,…, r n ), где q i ∈ R и r i ∈
09 R На основе принципа выравнивания электроотрицательности Сандерсона, 37 , необходимо уравнять электроотрицательность всех атомов.
где ϵ i — электроотрицательность атома i , а ϵ_ — средняя молекулярная электроотрицательность. Другое ограничение вынуждает сумму зарядов атомов быть равной данному чистому заряду системы.
Ограничения и параметризованные межатомные взаимодействия могут быть объединены в следующее линейное уравнение, в котором заряды q являются решением:
[h2n1nT0] [qϵ _] = [- χqnet]
Здесь χ — вектор атомных электроотрицательностей n на 1, а значения H ij , то есть отдельные элементы n на n Матрица H , определяются как δ ij η i + (1 — δ ij ) F ij, F ij ij — оператор дельты Кронекера, η i — идемпотенциал, а F ij определяется как
Fi, j = 1rij3 + γij − 33, rij≤rnonb 0, иначе
В приведенных выше уравнениях rij = ‖ri − rj‖ — это расстояние между атомами i и j , r nonb — радиус отсечки, γij = γiγj — попарный экранирующий член , настроенный для типов элементов атомов i и j , чтобы избежать неограниченной электростатической энергии на малых расстояниях, а ϵ_ — диэлектрическая проницаемость среды.Было продемонстрировано, что модель EEM воспроизводит рассчитанные QM заряды Малликена. 38
Чтобы учесть поляризационный эффект атомов переходной области на основной области ReaxFF, мы вводим атомы ReaxFF / AMBER как частицы с фиксированными зарядами в решатель EEM. Это делается путем модификации системы уравнений следующим образом. Предполагая, что имеется c атомов ReaxFF и t атомов переходной области, тогда H core ∈ R c × c захватывает взаимодействия внутри основной области ReaxFF, а H core-trans ∈ R c × t фиксирует воздействие атомов переходной области на атомы ReaxFF.
[Hcore Hcore-trans 1cHtrans-core Htrans 1t1cT1tT0] [qcore qtrans ϵ _] = [- χcore −χtrans qnet]
Поскольку прямое решение вышеупомянутой линейной системы масштабируется кубическим образом с числом общих атомов, обычно используются итерационные решатели для получения приближений к оптимизированным динамическим зарядам. В такой итерационной схеме мы развиваем только заряды на основных атомах, поскольку q trans — фиксированные значения, заданные в силовом поле MM. Таким образом, строки, соответствующие атомам переходной области, можно не учитывать в указанной выше линейной системе, и мы получаем
[Hcore Hcore-trans 1c1cT1tT0] [qcore ϵ _] = [- χcore qnet]
Поскольку q trans является фиксированным, его можно переставить как
[Hcore 1c1cT0] [qcore ϵ _] = [- χcore qnet] — [Hcore-trans 0tT] [qtrans]
Эти модификации гарантируют, что наличие фиксированных зарядов не замедлит этап уравновешивания зарядов, поскольку фиксированные заряды и динамические заряды разделены.См. Пример в разделе «Вспомогательная информация» (S1).
Вышеуказанных модификаций достаточно для запуска непериодических симуляций ReaxFF / MM, а также периодических граничных симуляций без дальнодействующих электростатических взаимодействий. При периодическом моделировании границ с электростатическими взаимодействиями на больших расстояниях AMBER использует подход Эвальда с сеткой частиц (PME), который вычисляет взаимодействия в пределах определенного расстояния отсечки напрямую и аппроксимирует остальные по сетке. 39 Чтобы иметь возможность учитывать дальнодействующие взаимодействия в EEM, мы включили влияние точек сетки на атомы ReaxFF путем дальнейшего расширения матрицы EEM, то есть путем добавления столбца и строки, содержащих эффекты точки сетки.Эта схема не сохраняет энергию при моделировании NVE с периодическими границами, потому что ReaxFF использует конусообразные электростатические взаимодействия 40 , которые заставляют кулоновские эффекты медленно затухать до 0 при радиусе отсечки взаимодействия, который обычно устанавливается равным 10–12 Å (см. SI, Рисунок S1). Снижение кулоновских взаимодействий является встроенной функцией формулировки ReaxFF, и существующие наборы параметров ReaxFF были обучены с учетом этого принципа проектирования. Мы считаем, что путем переобучения параметров ReaxFF без сужающихся кулоновских ядер можно успешно включить периодическое моделирование границ с помощью PME, но это выходит за рамки данной статьи, поэтому мы оставляем это в качестве темы для дальнейшего изучения.
3.3. Проверка.
Для проверки полученной комбинации ReaxFF / AMBER мы провели эксперименты с системами бензол-в-воде, одна с периодическими граничными условиями, а другая без (). Бензол не реагирует с водой, но цель этих вычислительных экспериментов состояла в том, чтобы подтвердить, что метод ReaxFF / MM может обеспечить энергосбережение и произвести разумные динамические заряды.
(Слева) Бензол ReaxFF в капле воды TIP3P с общим количеством атомов 627, (справа) Бензол ReaxFF в резервуаре с водой TIP3P с общим количеством атомов 4398.
Для обоих симуляций (непериодического и периодического) системы сначала минимизируют энергию, а затем нагревают до 300 K с помощью термостата Берендсена в AMBER. Наконец, моделирование ReaxFF / MM NVE запускается с использованием временного шага 0,25 фс для проверки энергосбережения и заряда. Был выбран относительно короткий временной шаг, поскольку это рекомендуемая настройка для моделирования ReaxFF, особенно в присутствии атомов H. Для всех симуляций алгоритм SHAKE был отключен.
Как показано на, энергия сохраняется для обоих моделей.показывает заряды углерода и водорода для атомов Reax (обозначаемых как Reax-C и Reax-H, соответственно), а также среднее значение по всем атомам C и H на временном шаге (обозначается как Reax-C-Avg и Reax-H. -Avg соответственно). Как можно видеть, динамические заряды, создаваемые ReaxFF / MM под действием статически заряженных атомов переходной области, соответствуют зарядам углерода и водорода, указанным в силовом поле AMBER для бензола (обозначенном как AMBER-C и AMBER-H, соответственно. ).
Моделирование молекулы бензола в воде с использованием модели воды TIP3P и ансамбля NVE.Использовался шаг по времени 0,25 фс. (Синий) Непериодическое граничное условие с бесконечным обрезанием. (Красный) Периодическое граничное условие с отсечкой QM 10 Å (qmcut = 10 Å) и отключенным взаимодействием ReaxFF / PME (qm_pme = 0).
Динамические заряды ReaxFF и фиксированные заряды AMBER с моделированием ReaxFF / MM молекулы бензола в воде с периодическими граничными условиями с использованием параметров qmcut = 10 A и qm_pme = 0
3.4. Анализ производительности.
Как упоминалось ранее, мотивация метода ReaxFF / MM заключается в том, что он может значительно сократить время вычислений, которое потребовалось бы для сопоставимого моделирования QM / MM.Чтобы проиллюстрировать это, мы провели сравнительный анализ вычислительных затрат на отдельные модели уравновешивания аллилвинилового эфира (AVE), который состоит из 14 атомов, с использованием ReaxFF, PuReMD, SCC-DTFB, PM3, MM, метода Хартри – Фока (HF) и функционала плотности. теория (ДПФ) с использованием функционала B3LYP. В расчетах HF и DFT использовался базисный набор 6–31G *. Тестовое моделирование проводилось с использованием автономных программ ReaxFF, PuReMD, AMBER и программного пакета QUICK 41 в режиме последовательного выполнения на процессоре Intel Xeon E5–2670 v2, который работает на 2.50 ГГц. Ориентировочное время на шаги моделирования показано в.
Таблица 1.
Время последовательного выполнения в секундах на временной шаг и наносекундах в день для вычислений SCC-DFTB, PM3, ReaxFF, PuReMD, MM, HF и DFT a