Асинхронные электродвигатели: схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный – с короткозамкнутым ротором
- 3-х фазный – с короткозамкнутым ротором
- 3-х фазный – с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
Недостатки:
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
Преимущества фазного:
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
Недостатки:
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания – в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент – в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки – не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи – они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска – они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности.
Асинхронный электродвигатель: устройство и принцип работы
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.

- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали

Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.

То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
С ним наша жизнь стала более комфортной.
Асинхронные электродвигатели
Асинхронные погружные электродвигатели (ПЭД) — это наиболее широко используемый тип двигателей для привода электроцентробежных насосов. Несмотря на то, что они не способны развивать высокие обороты, как двигатели на постоянных магнитах (вентильные), они доказали свою надежность в ходе эксплуатации, обладают меньшей себестоимостью и трудоемкостью изготовления. Стандартные асинхронные двигатели просты в эксплуатации и доступны в широком диапазоне типоразмеров по мощности, габариту и исполнению.
От технического уровня на стадии проекта, качества изготовления и надежной работы двигателя зависит долговечная работа установки. Компания «Новомет» имеет собственную научно-техническую базу для проектирования, изготовления и испытания опытных образцов, а также производственную базу для серийного изготовления погружных электродвигателей.
область применения
- Применяются в качестве привода центробежных насосов, применяемых для откачки пластовой жидкости.

возможности
- Выпускаются в габаритах от 96 мм до 185 мм
- Номинальная мощность в диапазоне от 16 до 650 кВт
особенности
- Широкая линейка типоразмеров по мощности и габариту
- Применение компаундированного статора позволяет добиться полной герметезации обмоток, устранить перегрев, увеличить сопротивление изоляции в 10 раз
- Фильтр для масла в основании двигателя позволяет продлить срок безотказной эксплуатации
| Наружный диаметр двигателя |
Номинальная мощность |
||
|
1 секция |
2 секции |
3 секции |
|
|
96 мм 3.78 дюйма |
16-32 кВт (@50Гц) |
45-56 кВт (@50Гц) |
70-100 кВт (@50Гц) |
|
103 мм 4. |
16-90 кВт (@50Гц) |
63-160 кВт (@50Гц) |
140-250 кВт (@50Гц) |
|
117 мм 4.60 дюйма |
12-125 кВт (@50Гц) |
90-250 кВт (@50Гц) |
270-400 кВт (@50Гц) |
|
130 мм 5.12 дюйма |
22-140 кВт (@50Гц) |
160-300 кВт (@50Гц) |
350-560 кВт (@50Гц) |
|
143 мм 5.62 дюйма |
63-220 кВт (@50Гц) |
260-440 кВт (@50Гц) |
555 кВт (@50Гц) |
|
185 мм 7.44 дюйма |
100-400 кВт (@50Гц) |
345-650 кВт (@50Гц) |
|
 06 дюйма
06 дюймаВ настоящее время компанией «НОВОМЕТ» производится широкая линейка асинхронных электродвигателей, освоено 6 габаритов: 96, 103, 117, 130, 143 и 185 мм. Число типоразмеров ПЭД – от 7 до 28 в каждом габарите диапазон мощностей – от 8 до 650 кВт. Обширная номенклатура позволяет подобрать наиболее оптимальное сочетание двигатель-насос, для обеспечения работы установки с максимально возможным КПД.
Число типоразмеров ПЭД – от 7 до 28 в каждом габарите диапазон мощностей – от 8 до 650 кВт. Обширная номенклатура позволяет подобрать наиболее оптимальное сочетание двигатель-насос, для обеспечения работы установки с максимально возможным КПД.
В зависимости от конструкции электродвигатели могут изготавливаться в различных модификациях, например с трубчатым охладителем (для температуры окружающей среды до 200°С), с двухсторонним выходом вала (для установок перевернутого типа, или присоединения погружного сепаратора механических примесей).
Электродвигатели оснащаются погружным блоком контроля параметров установки различных производителей, в том числе ТМС-Новомет.
Погружной электродвигатель состоит из основных элементов: неподвижного статора, вращающегося ротора, головки с токовводом и основания. Электродвигатель выполняется маслозаполненным. В головке электродвигателя, расположенной в верхней части, размещена колодка токоввода и узел упорного подшипника, который воспринимает осевые нагрузки от веса ротора. Основание расположено в нижней части электродвигателя и содержит фильтр для очистки масла. Головка и основание герметично соединены с корпусом статора резьбой.
Основание расположено в нижней части электродвигателя и содержит фильтр для очистки масла. Головка и основание герметично соединены с корпусом статора резьбой.
Низковольтные асинхронные электродвигатели многополюсные по доступным ценам от «Электроресурс»
Предприятие «Электроресурс» занимается продажей различных видов продукции. Ассортимент включает низковольтные асинхронные взрывозащищенные электродвигатели общепромышленного использования. Изделия создаются согласно существующим стандартам. Каждая из существующих линеек электродвигателей – это обширная номенклатура низковольтного оборудования. Отдельные варианты различаются по таким параметрам, как частота совершения вращательных движений, мощность, питающее напряжение, конструктивные особенности. Тот технический уровень, которого удалось достичь, а также достойное качество материалов и деталей, используемых в производственной деятельности, обеспечивают высокую надежность, эффективность и удобство использования готовых изделий.
Мы производим и реализуем электромоторы совместно с деловыми партнерами. Сотрудничество c ОАО «ЭЛДИН» и ООО «ЭЛЕКТРОРЕСУРС» позволило производить особые многополюсные низковольтные электрические двигатели, относящиеся к серии ВАБ. Они были разработаны для оборудования воздушного охлаждения, чья мощность варьируется в пределах от 6,5 до 110 кВт, а частота вращения составляет 250-750 оборотов за минуту.
Базовые характеристики асинхронных низковольтных электродвигателей в стандартном исполнении:
- уровень шума: от 61 до 90 Гц;
- допустимые уровни звуковой мощности: от 77 до 87 Гц;
- высота вращения оси: от 160 до 450;
- допустимая температура окружающей среды: от -60 до +45ºС;
- класс нагревостойкости изоляции 155(F) согласно актуальным государственным стандаратам;
- класс изоляции 180(Н) по запросу.
Главные преимущества низковольтного асинхронного оборудования
- Регулярный мониторинг рынка, в котором функционирует компания, позволяет расширять номенклатуру.
- Стабильное повышение технического и экономического уровня производимых двигателей в зависимости от изменений, происходящих на рынке.
- Стабильность установочно-присоединительных параметров изделий, что позволяет использовать их для проведения замены оборудования, которое устарело, либо перестало функционировать в прежнем режиме.
- Удобство получения готовой продукции. При необходимости все технические характеристики низковольтных электродвигателей, а также расценки и условия поставки можно оговорить заблаговременно.
- Заключение официального договора с каждым клиентом.
- Выбор оптимального способа транспортировки электродвигателей находится в зависимости от заказанного товара. Специалисты выбирают подходящие средства и способ отгрузки.
- Все двигатели и другие виды оборудования поставляются со склада, располагающегося в Ярославле.
- На все виды электродвигателей оформлены сертификаты, есть разрешение на эксплуатацию во взрывоопасных районах.
- Наличие в штате квалифицированных специалистов с большим опытом, которые всегда готовы оказать техническую поддержку.

Разновидности асинхронных низковольтных электродвигателей
На выбор предлагаются различные комплектации:
- взрывозащитные электродвигатели;
- отличающиеся более высокой степенью безопасности;
- защищенные от воспламенения из-за взаимодействия с горючей пылью;
- дополненные тормозом и так далее.
Вы можете подобрать асинхронные электродвигатели, предназначенные для морского использования или для оснащения приводов прокатных станов.
Электрические показатели электродвигателей
Температурный класс Т4. Номинальные данные и мощности регламентированы для температуры окружающей среды 40°С. Превышение температуры по классу B.
| Типоразмер двигателя | Мощность (кВт) | Частота вращения (об/мин) | КПД (%) | Коэффициент мощности (о. с.) с.) |
Ток при 380 В (А) |
|---|---|---|---|---|---|
| 750 об/мин (синхронная частота вращения) | |||||
| с алюминиевой литой обмоткой ротора | |||||
| BA160SА8 | 4.0 | 730 | 84.0 | 0.71 | 10.2 |
| BA160SВ8 | 5.5 | 735 | 86.0 | 0.73 | 13.3 |
| BA160S8 | 7.5 | 730 | 86.0 | 0.75 | 17.7 |
| BA160М8 | 11.0 | 730 | 88.0 | 0.75 | 19.6 |
| ВАБ200SC8 | 9.0 | 730 | 88.5 | 0.80 | 19.3 |
| с медной стержневой обмоткой ротора | |||||
| ВАБ200SC8 | 9. 0 0 |
740 | 90.3 | 0.80 | 18.9 |
| 500 об/мин (синхронная частота вращения) | |||||
| с алюминиевой литой обмоткой ротора | |||||
| ВАБ160S12 | 3.0 | 480 | 83.0 | 0.75 | 7.3 |
| ВАБ160S12 | 5.5 | 481 | 80.8 | 0.72 | 14 |
| ВАБ180S12 | 6.0 | 483 | 81.7 | 0.71 | 16 |
| ВАБ180MA12 | 7.5 | 482 | 83.0 | 0.72 | 19 |
| ВАБ180MB12 | 9.0 | 480 | 83.5 | 0.72 | 23 |
| с медной стержневой обмоткой ротора | |||||
| ВАБ200SB12 | 6. 5 5 |
488 | 85.1 | 0.71 | 16.3 |
| ВАБ200SC12 | 7.5 | 488 | 86.0 | 0.71 | 18.7 |
| ВАБ200MB12 | 9.0 | 489 | 86.3 | 0.70 | 22.6 |
| ВАБ200LB12 | 11.0 | 489 | 86.9 | 0.70 | 27.5 |
3-фазные низковольтные электродвигатели с короткозамкнутым ротором Класс изоляции F. Режим работы S1.
| В сети | |||||||
|---|---|---|---|---|---|---|---|
| Вид охлаждения | IC411 | ||||||
| Момент нагрузки | — | ||||||
| Частота | 50гц | ||||||
| Диапазон регулирования | — | ||||||
| Тип | P2H (кВт) | П2H (об/мин) | I1380В (А) | КПД (%) | Cos φ | MH (Нм) | Mмакс (Нм) |
| RA71A2 | 0. 37 37 |
2835 | 1.0 | 71.0 | 0.78 | 1.3 | 3.4 |
| RA71B2 | 0.55 | 2835 | 1.3 | 76.0 | 0.83 | 1.9 | 5.2 |
| RA80A2 | 0.75 | 2835 | 1.8 | 75.5 | 0.83 | 2.5 | 7.1 |
| RA80B2 | 1.1 | 2820 | 2.5 | 79.0 | 0.86 | 3.7 | 10.4 |
| RA90S2 | 1.5 | 2820 | 3.3 | 79.0 | 0.87 | 5.1 | 13.7 |
| RA90L2 | 2.2 | 2820 | 82. 0 0 |
0.87 | 0.80 | 7.5 | 23.1 |
| RA100L2 | 3.0 | 2805 | 6.5 | 82.0 | 0.86 | 10.2 | 32.7 |
| RA112M2 | 4.0 | 2865 | 8.1 | 85.0 | 0.88 | 13.3 | 48.0 |
| A71A2 | 0.75 | 2835 | 1.8 | 75.5 | 0.83 | 2.5 | 7.1 |
| A71B2 | 1.1 | 2820 | 2.5 | 79.0 | 0.86 | 3.7 | 10.4 |
| A80A2 | 1.5 | 2820 | 3.3 | 79.0 | 0.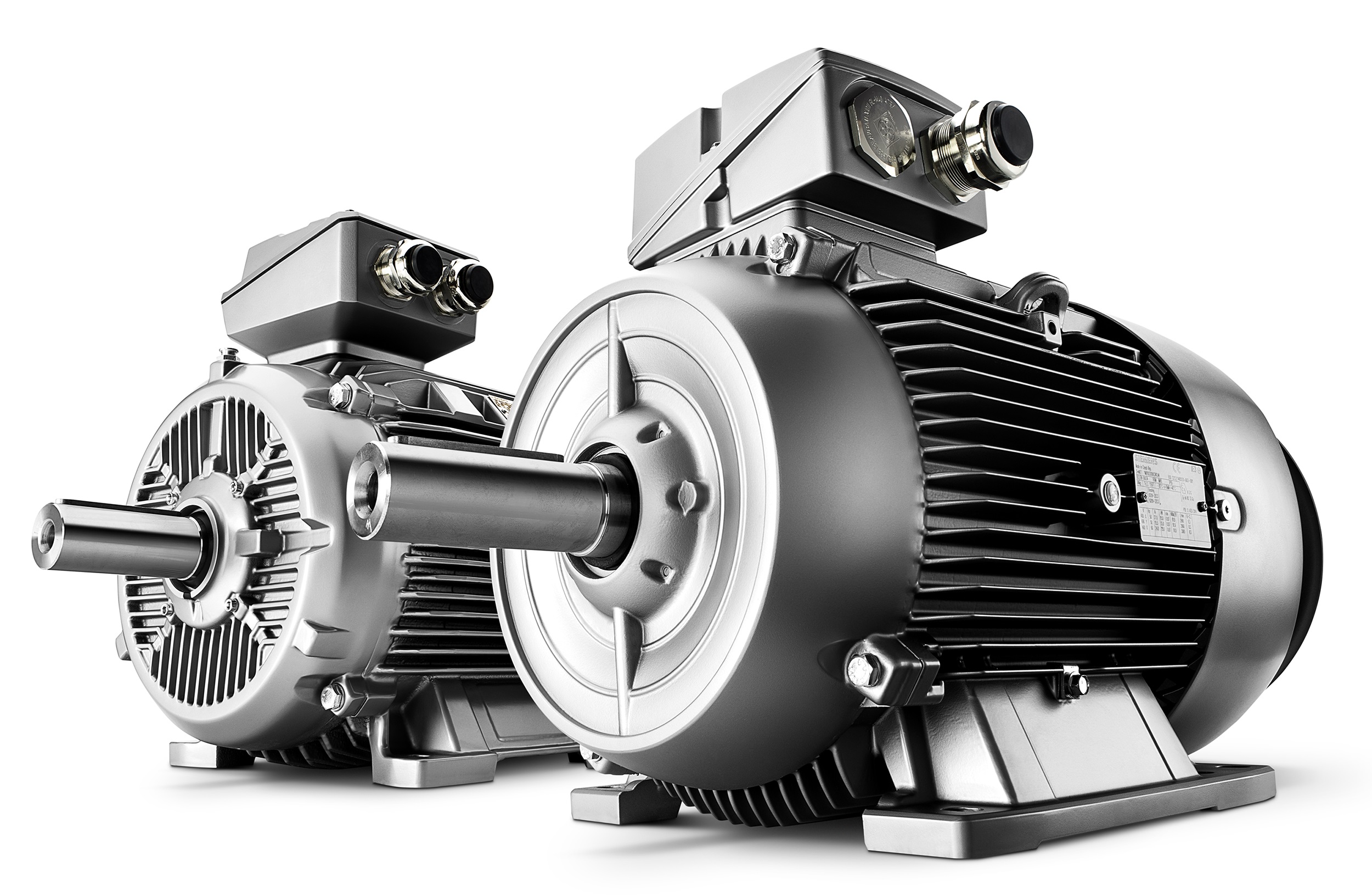 87 87 |
5.1 | 13.7 |
| A80B2 | 2.2 | 2820 | 4.6 | 82.0 | 0.87 | 7.5 | 23.1 |
| A90L2 | 3.0 | 2805 | 6.5 | 82.0 | 0.86 | 10.2 | 32.7 |
| A100S2 | 4.0 | 2850 | 8.4 | 84.0 | 0.86 | 13.4 | 48.3 |
| A100L2 | 5.5 | 2890 | 11.0 | 87.0 | 0.87 | 18.2 | 61.8 |
| A112M2 | 7.5 | 2885 | 14.7 | 88.0 | 0.88 | 24.8 | 84. 4 4 |
| A132M2 | 11.0 | 2870 | 22 | 88.0 | 0.88 | 36.6 | 128 |
| АИР160S2 | 15.0 | 2940 | 30 | 89.0 | 0.86 | 48.7 | 156 |
| АИР160М2 | 18.5 | 2940 | 35 | 90.0 | 0.87 | 60.1 | 192 |
| АИР160S4 | 15.0 | 1460 | 29 | 89.0 | 0.87 | 98.1 | 284 |
| АИР160М4 | 18.5 | 1460 | 35 | 90.0 | 0.89 | 121 | 351 |
| АИР160S8 | 7. 5 5 |
730 | 18 | 85.0 | 0.73 | 98.1 | 235 |
| АИР160M8 | 11.0 | 730 | 26 | 87.0 | 0.75 | 144 | 346 |
Применение асинхронных электродвигателей в промышленности | Полезные статьи
Агрегат, преобразующий электрическую энергию в механическую, называется электродвигателем. Эти машины могут применяться в бытовой технике (маломощные асинхронные двигатели) и в промышленности (краны и лебедки общепромышленного значения и прочее).
Рисунок 1. Классический пример трехфазного асинхронного электродвигателя — двигатель серии АИР Наибольшее распространение получили трехфазные асинхронные электродвигатели — они используются во всех сферах народного хозяйства (станки и оборудование, автоматика, телемеханика и т. д.).
д.).
На сегодняшний день именно этот тип электрических машин наиболее распространен. Объясняется это простотой эксплуатации, надежностью этих машин, небольшим весом и удачными габаритными размерами.
Электродвигатель с короткозамкнутым ротором используется в электроприводах разных станков (металлообрабатывающих, грузоподъемных, ткацких, деревообрабатывающих), в вентиляторах, землеройных машинах, в лифтах, насосах, бытовых приборах и т.д.
Электродвигатель асинхронный с короткозамкнутым ротором позволяет значительно снизить энергопотребление оборудованием, которое он питает, обеспечить высокий уровень его надежности, увеличить срок службы. Совокупность этих характеристик, как правило, сразу положительно отражается на модернизации всего производства.
Основные виды и некоторые характеристики электродвигателя асинхронного однофазного и трехфазного
Сегодня самыми востребованными в разных отраслях промышленности и любого производства являются следующие виды машин:
- общепромышленные — применяются на производстве и в агропромышленном секторе;
- взрывозащищенные — предназначены для использования в отраслях промышленности взрывоопасной: химическая, добыча нефти, газовая и угледобывающая промышленность;
- электродвигатели крановые, подходящие для работы в составе любых поворотных и крановых механизмов.

Рисунок 2. Двигатель с фазным ротором — крановый серии МТF. Электродвигатели прочно вошли в современную промышленность. От их надежности и качества зависит все производство. Не важно, стиральная машина или ткацкий станок, складское оборудование или система вентиляции — работа многих машин невозможна без исправной работы электромотора. В этой связи важно не просто купить электродвигатель, например у надежного поставщика, но и неукоснительно соблюдать все указанные в сопроводительных документах условия эксплуатации. Для северного сурового климата, к примеру, требуются специальные двигатели, которые рассчитаны на эксплуатацию в условиях низких температур. Для эффективной работы в электродвигателях может использоваться встроенная температурная защита. Такое конструктивное решение позволяет отключить двигатель от сети, если температура обмоток или подшипников превысит норму, или включить дополнительные вентиляторы обдува.
Для оформления заказа позвоните менеджерам компании Кабель. РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту [email protected] с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту [email protected] с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
NORD — Электродвигатели NORD DRIVEYSTEMS
Электродвигатели
Большая мощность, маленький расход
NORD поставляет широкий спектр электродвигателей, которые отвечают всем принятым мировым требованиям и стандартам эффективности. Наши двигатели находят применение в многочисленных приложениях, потому что они не только мощные и прочные, но и комбинируются со всеми редукторами NORD.
Будь то в мешалках, конвейерных системах, внутрипроизводственной логистике или пищевой промышленности, электродвигатели NORD можно найти везде, где требуется высокая мощность. Они работают надежно и с очень высоким КПД (до 95 процентов) на протяжении многих лет. Это позволяет нашим клиентам экономить на эксплуатационных расходах и одновременно сохраняет окружающую среду.
Доводы в пользу покупки электродвигателей NORD:
- Максимальная эффективность
Наши электродвигатели соответствуют требованиям действующего стандарта IEC 60034-30-1: 2014 и EUP 640/2009, а экономичные синхронные двигатели – даже самому высокому классу эффективности IE4. - Лучшее качество
Мы производим все двигатели на собственном производстве в соответствии со строгими стандартами. - Высокая эксплуатационная готовность
Благодаря нашему собственному производству мы можем доставить все наши электродвигатели за короткое время по всему миру. - Высокая гибкость
Благодаря одинаковым размерам двигателей вы можете легко переходить с одного класса энергоэффективности на следующий, без необходимости проведения механической регулировки.
Экономичные и сильные: наши электродвигатели
Электрические приводы в промышленных применениях расходуют до 70 процентов от общей потребляемой энергии. Для многих компаний здесь открывается большой потенциал для оптимизации.
Поэтому мы в NORD разработали серию мощных энергосберегающих двигателей. Эти одиночные двигатели характеризуются очень высоким КПД и иногда значительно эффективнее, чем это требует актуальное постановление ЕС.
Энергоэффективные электродвигатели NORD подходят практически для любого применения. Самая экономичная серия IE4 выпускается в трех типоразмерах с мощностью от 1,1 до 5,5 кВт.
Вы хотите значительно сократить свои затраты на энергию? Тогда получите информацию о наших энергоэффективных синхронных двигателях IE4 прямо сейчас!
Нажмите здесь
Электродвигатели для особых областей применения
В некоторых областях применения стандартные двигатели не могут быть использованы, например, потому что условия окружающей среды слишком суровы, транспортируемые грузы слишком тяжелые или существует опасность взрыва.
Для таких случаев в нашем ассортименте есть специальные двигатели в диапазоне мощности от 0,12 до 30 кВт: взрывозащищенные версии доступны в вариантах для использования в пылевой атмосфере и в газовой атмосфере. Наши двигатели сертифицированы в соответствии с требованиями ATEX, IECEx и HazLoc. Посмотрите, как ведут себя наши одиночные двигатели в сложнейших условиях на сталелитейном заводе!
Посмотреть видео
Асинхронные электродвигатели. Виды и устройство. Работа
Асинхронные электродвигатели были изобретены в 1889 году. В настоящее время выпускается большой спектр электрических двигателей. Из них наибольшую популярность приобрел электродвигатель асинхронного типа, трехфазный. Половина всей электроэнергии в мире расходуется такими электродвигателями. Они нашли широкое использование во многих отраслях промышленности, в быту, электроинструменте, так как имеет невысокую стоимость, повышенную надежность, простое обслуживание и эксплуатацию.
Область использования таких электромашин становиться все шире, так как их конструкция совершенствуется. В переводе с английского такой электродвигатель называют индукционным. И это легко объяснить, так как это вид моторов, в котором явление индукции применяется для создания полюсов, другими словами, применяются наводки для образования движущей силы. Особенностью асинхронных двигателей является отличие частоты поля от скорости вращения вала. В других типах двигателей используются постоянные магниты, обмотки и т.д.
Устройство
Асинхронные электродвигатели состоят из:
- Ротора.
- Статора.
Статор, состоит из основных частей:
- Корпус. Служит для образования соединений деталей мотора. При малом размере мотора корпус цельнолитой. Материал изготовления – чугун. Могут использоваться сплавы алюминия, либо сталь. Часто в небольших двигателях функцию сердечника выполняет корпус. В больших моторах со значительной мощностью корпус имеет сварную конструкцию.
- Сердечник. Эта деталь запрессована в корпус, и предназначена для повышения магнитной индукции, изготовлена из электротехнической стали в виде пластин. Для уменьшения потерь, возникающих при вихревых токах, сердечник покрывается лаком.
- Обмотка. Она расположена в пазах сердечника. Для ее намотки применяется медная проволока, секциями, соединенными между собой по определенной схеме. Витки образуют 3 катушки, которые по сути дела играют роль обмотки статора. Эта обмотка первичная, непосредственно к ней подключается питание.
Ротор:
- Ротор – элемент двигателя, находящийся во вращении, предназначен для трансформации магнитного поля в энергию движения, состоит из частей:
- Вал. Подшипники вала находятся на его хвостовиках. При сборке двигателя подшипники запрессовываются, фиксируются болтами к крышкам корпуса.
- Сердечник. Его сборку производят на валу двигателя. Он состоит из металлических пластин электротехнической стали, которая обладает свойством малого сопротивления магнитному полю. Форма сердечника в виде цилиндра используется для укладки катушки якоря, которая называется вторичной. Она получает энергию от магнитного поля, появляющегося вокруг обмоток статора при подаче питания.
- С короткозамкнутым ротором.
Такой тип двигателя оснащен обмоткой в виде алюминиевых стержней, расположенных в пазах сердечника. На торце ротора они замыкаются между собой кольцами.
- С ротором, оснащенным контактными кольцами.
Оба типа моторов имеют схожую конструкцию статора. Разница состоит лишь в конструкции якоря.Классификация по числу фаз
Асинхронные электродвигатели трехфазные являются основными типами моторов. Они оснащены 3-мя обмотками на статоре, смещены на 120 градусов, соединены между собой треугольником, либо звездой, получают питание от трех фаз переменного тока.
Асинхронные электродвигатели небольшой мощности чаще всего изготавливаются двухфазными. Они отличаются от 3-фазных моторов оснащением 2-мя обмотками на статоре, которые смещены между собой на угол 90 градусов.
В случае равенства токов по модулю, и их сдвигу по фазе на 90 градусов, действие мотора не будет иметь отличия от 3-фазного двигателя. Но такие типы двигателей чаще подключаются от однофазной сети, а искусственный сдвиг на 90 градусов образуется за счет конденсаторов.
Асинхронные электродвигатели однофазные оснащаются единственной обмоткой на статоре. Они практически не могут работать. Когда вал электродвигателя неподвижен, то при подаче питания образуется только импульсное магнитное поле, а момент вращения равен нулю. Но если ротор у такого электродвигателя принудительно раскрутить, то он сможет функционировать и приводить в действие какой-либо привод механизма.
В таком случае пульсирующее поле складывается из 2-х симметричных полей: прямого и обратного. Они образуют разные моменты: один двигательный, другой тормозной. Но двигательный момент получается больше тормозного, возникающего вследствие токов ротора высокой частоты.
В связи с этим 1-фазные моторы оснащаются второй обмоткой, применяющейся в качестве пусковой. В ее цепи для сдвига фаз подключают конденсаторы. Их емкость имеет значительную величину, и может достигать нескольких десятков мкФ при маломощном моторе, меньше 1000 ватт.
В управляющих системах применяют 2-фазные асинхронные электродвигатели, получившие название исполнительных. Они оснащены двумя обмотками статора, которые имеют сдвиг фаз на 90 градусов. Одна обмотка (возбуждения) питается от сети 50 герц, а вторая применяется в качестве управляющей.
Чтобы образовалось магнитное поле с вращающим моментом, ток в управляющей обмотке должен иметь сдвиг 90 градусов. Для регулировки скорости мотора изменяют значение тока в этой обмотке, либо меняют угол фазы. Реверсивное движение обеспечивается сменой фазы в обмотке управления на 180 градусов, с помощью переключения обмотки.
2-фазные асинхронные электродвигатели производятся в разных исполнениях:
- Короткозамкнутым ротором.
- Полым магнитным ротором.
- Полым немагнитным ротором.
Чтобы преобразовать движение вращения в поступательное движение, необходимо применение определенных механизмов. Поэтому при необходимости двигатель конструктивно выполняют таким образом, что его ротор сделан в виде бегунка с линейными движениями.
В таком случае двигатель получается развернутым. Обмотка статора такого мотора сделана, как и у обычного двигателя, но она должна быть уложена на всей длине перемещения бегунка (ротора) в пазы. Такой ротор в виде бегунка чаще бывает короткозамкнутым. К нему присоединен привод механизма. На краях статора располагают ограничители, которые не дают ротору выходить за определенные пределы.
Принцип действияЯкорь электродвигателя приводится в действие с помощью эффекта магнитного поля, возникающего в катушках статора. Для лучшего понимания принципа работы мотора, нужно освежить в памяти закон самоиндукции. Он говорит, что вокруг подключенного к питанию проводника образуется магнитное поле. Его величина прямо зависит от индуктивности проводника и потока частиц.
Также, магнитное поле образует силу, направленную в определенную сторону, которая вращает ротор мотора. Чтобы двигатель работал с достаточной эффективностью, нужно получить значительный магнитный поток. Его можно создать особой установкой первичной обмотки.
Источник напряжения выдает переменное напряжение, значит, вокруг статора магнитное поле будет с такими же свойствами, и прямо зависит от изменения тока сети. Фазы смещены между собой на 120 градусов.
Процессы в обмотке статораВсе фазы сети подключаются к катушкам статора, каждая фаза к определенной катушке. Поэтому магнитное поле будет иметь смещение на 120 градусов. Питание поступает в виде переменного напряжения, значит, вокруг катушек возникнет переменное магнитное поле.
Схема двигателя выполняется так, чтобы магнитное поле вокруг катушек постепенно менялось и переходило от одной катушки к другой. Так образуется магнитное поле с эффектом вращения. Можно определить частоту вращения, которая будет измеряться в числе оборотов вала мотора. Она вычисляется по формуле:
n = 60*f / p, где f – частота тока в сети, р – количество пар полюсов статора.
Работа ротораПроцессы во вторичной обмотке ротора, и особенность конструкции, которую имеют асинхронные электродвигатели с короткозамкнутым ротором.
К обмотке якоря напряжение не подается. Оно возникает из-за индукционной связи с первичной обмоткой. Из-за этого и происходит действие, обратное действию в статоре. Оно соответствует закону: при пересечении проводника магнитным потоком, в нем образуется электрический ток. Магнитное поле возникает вокруг первичной обмотки от того, что к ней подключается трехфазное питание.
Совместная работа ротора и статораМы имеем асинхронный мотор с ротором, в котором протекает электрический ток по его обмотке. Этот ток станет причиной появления магнитного поля возле обмотки якоря. Но полярность потока не будет совпадать с потоком статора. А значит, и сила, которая создается им, будет противодействовать силе магнитного поля первичной обмотки, что заставит двигаться ротор, потому что на нем выполнена вторичная обмотка, а вал закреплен на подшипниках в корпусе мотора.
Разберемся в ситуации, когда взаимодействуют силы магнитных полей ротора и статора, по истечении времени. Известно, что магнитное поле первичной катушки вращается с определенной частотой. Образованная им сила будет передвигаться с такой же скоростью. Это приводит в действие асинхронный двигатель, его ротор будет вращаться вокруг своей оси.
Подключение двигателя к питаниюДля запуска электродвигателя его нужно подключить к напряжению 3-фазного тока. Выполнить такое подключение возможно двумя методами: звездой и треугольником.
Схема звездой
Здесь изображен способ соединения треугольником.
Схемы собираются в клеммной коробке, расположенной на корпусе двигателя.
Чтобы запустить электродвигатель в обратном направлении вращения, необходимо только изменить местами две любые фазы путем перебрасывания двух проводов в коробке двигателя.
Похожие темы:
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), известный как беличья клетка. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из листов электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель сначала начинает вращаться.Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически становятся такими же, как у ротора с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает прохождение тока в обмотках статора.Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит, главным образом, от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные соотношения.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение, s, связывает эти два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, определяется уравнением трансформатора
E = 4,44 f N № м
, где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток по Веберсу.Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
E r = 4,44 s f N Ñ „ m = s E
Описание синхронных двигателейСинхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Существует два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем с переключаемым сопротивлением, содержит ротор, отлитый из стали, который имеет выемки или зубцы, называемые выступающими полюсами.Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются основными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента. Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
% {[data-embed-type = «image» data-embed-id = «5df27717f6d5f267ee27f7d9» data-embed-element = «aside» data-embed-align = «left» data-embed-alt = «Eetweb Com Sr Двигатель «data-embed-src =» https://base.imgix.net/files/base/ebm/machinedesign/image/2013/01/eetweb_com_SR_motor.png?auto=format&fit=max&w=1440 «data-embed-caption = «»]}% Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них щелей. Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники. Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения скорости вращения двигателя.
▷ Синхронные и асинхронные двигатели — где их использовать?
Многие люди часто путают термины «синхронные» и «асинхронные двигатели» и их применение. Именно поэтому один из новейших членов сообщества электротехники написал эту статью. Проверьте это ниже:
Следующая информация касается общих принципов работы синхронных и асинхронных двигателей, их преимуществ, а также где они обычно используются и чего можно достичь с помощью каждого из этих двигателей.
Давайте сначала сконцентрируемся на их принципах работы…
Синхронные и асинхронные двигатели — принципы работы
Синхронные двигатели
Это типичный электродвигатель переменного тока, способный развивать синхронную скорость. В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, что обеспечивает синхронизацию. Основной принцип работы заключается в том, что когда двигатель подключен к сети, электричество течет в обмотки статора, создавая вращающееся электромагнитное поле.Это, в свою очередь, индуцируется на обмотках ротора, который затем начинает вращаться.
Требуется внешний источник постоянного тока, чтобы синхронизировать направление и положение вращения ротора с направлением вращения статора. В результате такой блокировки двигатель либо должен работать синхронно, либо не вращаться совсем.
Двигатели асинхронные
Принцип работы асинхронных двигателей почти такой же, как и у синхронных двигателей, за исключением того, что к ним не подключен внешний возбудитель.Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока.
Единственная загвоздка здесь в том, что в асинхронных двигателях нет внешнего устройства, подключенного для возбуждения ротора, и, следовательно, скорость ротора зависит от переменной магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться со скоростью, меньшей, чем скорость магнитного поля статора.Поскольку скорость ротора и скорость магнитного поля статора меняются, эти двигатели известны как асинхронные двигатели. Разница в скорости известна как «проскальзывание».
Синхронные и асинхронные двигатели — преимущества и недостатки
- Синхронный двигатель работает с постоянной скоростью и заданной частотой независимо от нагрузки. Но скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с запаздыванием, так и с опережением, тогда как асинхронный двигатель всегда работает с запаздыванием p.f, который может быть очень низким при уменьшении нагрузок.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель может запускаться самостоятельно.
- На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения, как на асинхронный двигатель.
- Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель не требует внешнего возбуждения для работы.
- Синхронные двигатели обычно дороги и сложны по сравнению с асинхронными двигателями, которые менее дороги и удобны для пользователя. Синхронные двигатели
- особенно хороши для низкоскоростных приводов (ниже 300 об / мин), потому что их коэффициент мощности всегда можно отрегулировать до 1,0, и они очень эффективны. С другой стороны, асинхронные двигатели отлично подходят для скоростей выше 600 об / мин.
- В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях за счет использования мощных электронных преобразователей, которые генерируют очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронные и асинхронные двигатели — применение
Приложения для синхронных двигателей
- Они обычно используются на электростанциях для достижения соответствующего коэффициента мощности. Они работают параллельно шинам и часто перегружаются извне для достижения желаемого коэффициента мощности.
- Они также используются в обрабатывающей промышленности, где используется большое количество асинхронных двигателей и трансформаторов для преодоления запаздывающей p.f.
- Используется на электростанциях для выработки электроэнергии с заданной частотой.
- Используется для управления напряжением путем изменения его возбуждения в линиях передачи.
Применение асинхронных двигателей
Более 90% двигателей, используемых в мире, являются асинхронными двигателями, и они находят широкое применение в самых разных областях. Вот некоторые из них:
- Центробежные вентиляторы, нагнетатели и насосы
- Компрессоры
- Конвейеры
- Подъемники, а также краны большой грузоподъемности
- Станки токарные
- Масляные, текстильные, бумажные комбинаты и т. Д.
Заключение
В заключение, синхронные двигатели используются только тогда, когда от машины требуются характеристики низкой или сверхнизкой скорости, а также при желаемых коэффициентах мощности (как отстающих, так и опережающих). В то время как асинхронные двигатели преимущественно используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, подъемники, шлифовальные машины и т. Д.
Что вы думаете об этой статье? Вам это помогло?
Асинхронные двигатели переменного тока
|
Разница между синхронным и асинхронным двигателем (со сравнительной таблицей)
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требования к контактным кольцам и щеткам, их стоимость, эффективность, коэффициент мощности, источник тока, скорость, самозапуск , влияние на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различия между синхронным и асинхронным двигателем объясняются ниже в виде таблицы.
| BASIS | СИНХРОННЫЙ ДВИГАТЕЛЬ | АСИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Определение | Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость. N |
| Тип | Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. | Асинхронный двигатель переменного тока известен как асинхронный двигатель. |
| Скольжение | Без проскальзывания. Значение скольжения равно нулю. | Имеют пробуксовку, поэтому величина пробуксовки не равна нулю. |
| Дополнительный источник питания | Требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. | Не требует дополнительных источников запуска. |
| Контактное кольцо и щетки | Требуются контактное кольцо и щетки | Контактное кольцо и щетки не требуются. |
| Стоимость | Синхронный двигатель дороже по сравнению с асинхронным двигателем | Дешевле |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Изменяя возбуждение, коэффициент мощности может быть соответственно отрегулирован как отстающий, опережающий или единичный. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Электропитание | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самозапуск | Синхронный двигатель не самозапускается | Самозапуск |
| Влияние на крутящий момент | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости, ниже 300 об / мин. | Двигатель работает со скоростью выше 600 об / мин безупречно. |
| Применения | Синхронные двигатели используются на электростанциях, обрабатывающей промышленности и т. Д., Они также используются в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, то есть скорость ротора равна скорости статора двигателя.Отсюда следует соотношение N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор Асинхронного двигателя вращается со скоростью меньше синхронной, т.е. N
Разница между синхронным и асинхронным двигателем
- Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной.
- Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
- Синхронному двигателю требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости. Асинхронный двигатель не требует дополнительного источника пуска.
- Контактное кольцо и щетки необходимы в синхронном двигателе, тогда как асинхронный двигатель не требует контактного кольца и щеток. Только асинхронный двигатель с обмоткой требует и контактного кольца, и щеток.
- Синхронный двигатель дороже асинхронного двигателя.
- КПД синхронного двигателя больше, чем у асинхронного двигателя.
- Путем изменения возбуждения коэффициент мощности синхронного двигателя может быть отрегулирован соответственно как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с отстающим коэффициентом мощности.
- Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель запускается автоматически.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, но влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин работа асинхронного двигателя превосходна. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т. д.
- Синхронный двигатель используется в различных сферах применения на электростанциях, обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Таким образом, синхронный двигатель отличается от асинхронного двигателя.
Асинхронный двигатель | КСБ
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе создается током намагничивания, передаваемым через предоставленную электрическую энергию. Асинхронные двигатели характеризуются скольжением, т.е.е. зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля питающего напряжения.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор состоит из распределенных катушек, которые индуцируют напряжение в стержнях ротора (см. Индукция) посредством вращающегося магнитного поля. Это приводит к сильному протеканию тока в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм.Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора подключается к переменным резисторам, обычно используемым в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает плавный процесс пуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одно- или двухпроводных шин, закороченных на концах кольцевым проводником.Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис.1 Асинхронный двигатель
Рис.1 Асинхронный двигатель: Асинхронный двигатель в разрезе
В отношении контакта с водой различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором. См. Рис.2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||||
|---|---|---|---|---|---|
| Ротор | Обмотка | Сухой корпус | Сухой корпус (погружной 9019 9019 9019 9024 Сухой двигатель) 9024 | Сухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель |
| Влажный (двигатель с мокрым ротором) | Сухой двигатель (герметичный двигатель) | Двигатель с мокрым ротором насоса с мокрым ротором | Полностью погружной двигатель (заполненный жидкостью) | ||
Рис.2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
Сухой двигатель имеет различные типы защиты от проникновения воды (см. Тип защиты).
Погружной электродвигатель частично или полностью погружен в воду и обычно устанавливается в вертикальном положении. Тепло, вырабатываемое двигателем, передается непосредственно окружающей обрабатываемой жидкости. Его отличительной особенностью является корпус двигателя, который смачивается снаружи (см. Погружной электронасос).Внутреннее смачивание и глубина погружения отличают погружные двигатели с масляным или воздушным наполнением для малых и средних глубин погружения (погружные насосы для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, находящейся внутри и снаружи. Они рассчитаны на любую глубину погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные.Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см. Герметичный моторный насос).
Двигатель с мокрым ротором заполнен жидкостью и, в отличие от погружного двигателя, его корпус не смачивается снаружи. Он имеет подшипники с жидкостной смазкой (см. Подшипники скольжения) и вместе с насосом образует герметичный насосный агрегат (насос с мокрым ротором). Двигатель может быть оборудован мокрой обмоткой статора или, в сочетании с корпусом, сухой обмоткой, и часто является двигателем, который выбирают для циркуляционных насосов.
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем)Электродвигатели — это машины, которые преобразуют электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть предназначены для работы на переменном (AC) или постоянном (DC) токе. Двигатели переменного тока подразделяются на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторые общие черты, например, в конструкции, но совершенно разные по принципу действия и производительности.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и то, как они работают. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, относящуюся к работе однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока?Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу магнитного поля, действующего на проводник с током, который испытывает механическую силу.Где статор генерирует статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея вращательного магнитного поля RMF. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче входного переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток либо посредством индукции, либо через внешний источник тока, генерирующий собственное магнитное поле.Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью возбуждения статора и ротором, двигатель называется асинхронным двигателем.Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателях BLDC (бесщеточный постоянного тока), шаговых двигателях и серводвигателях.
Связанные сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его вращающееся магнитное поле статора, называемое синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока.Ротор может быть спроектирован для создания собственного магнитного поля с использованием внешнего источника постоянного тока через контактные кольца или постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных полюсам статора или целых кратных полюсов. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется с вращающимся магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не запускается сразу с синхронной скоростью (вращательное магнитное поле).Поэтому для обеспечения пускового момента используется дополнительная обмотка, называемая « демпферная обмотка ». Во время запуска он действует как асинхронный двигатель. Таким образом, предполагается, что синхронные двигатели не самозапускающиеся , им нужен дополнительный пусковой механизм.
Это может быть двигатель с раздельным возбуждением или без возбуждения, т.е. первый требует отдельного источника постоянного тока, возбуждает обмотки ротора и генерирует магнитное поле, в то время как последний описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора. и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты питания и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменять частоту питания. Это достигается за счет использования частотно-регулируемого привода (VFD).
Связанные сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью статора и ротора.
Ротор асинхронного двигателя представляет собой короткозамкнутый ротор или ротор с обмоткой. Ротор с короткозамкнутым ротором построен с использованием тяжелых медных стержней, соединенных на конце с помощью токопроводящего кольца, которое электрически закорачивает их вместе. Ротор с обмоткой состоит из нескольких обмоток поверх многослойного стального сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его порождает, и пытается устранить ее, догоняя скорость статора RMF (синхронную скорость). При этом ротор вращается в направлении статора RMF. Асинхронный двигатель , так как он работает по принципу индукции, также известен как асинхронный двигатель .
Асинхронный двигатель никогда не может работать на синхронной скорости, вместо этого она всегда ниже, чем синхронная скорость, и это зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если в случае, если он работает с синхронной скоростью, это означает, что ротор магнитно заблокирован, и между полем статора и ротора нет разницы. Следовательно, не будет магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать с меньшей скоростью, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет наведенному току проходить через медные шины. В то время как заведенный ротор позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Пускателе двигателя». Дело в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного подключения переменного резистора к обмоткам ротора с помощью контактных колец.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое изменяется в зависимости от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанное сообщение:
Различия между синхронным двигателем и асинхронным двигателемВ следующей таблице показаны основные различия между синхронным двигателем и асинхронным (индукционным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель — это тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это тип двигателя переменного тока, который работает со скоростью, меньшей, чем синхронная скорость. |
| Он работает по принципу магнитной блокировки между полем ротора и статора. | Он работает по принципу электромагнитной индукции между статором и ротором. |
| Нет скольжения, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе есть скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты питания и количество полюсов статора. Н с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. это всегда меньше синхронной скорости. N = N с (1 с) N |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускаются и не требуют дополнительных механизмов. |
| Ротор требует дополнительного источника тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронному двигателю с отдельным возбуждением требуется дополнительный источник постоянного тока для питания обмотки ротора. | Не требует дополнительных источников. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Для этого не требуются контактные кольца, однако, намотанный тип может использовать контактные кольца для управления скоростью. |
| Скорость двигателя регулируется только путем изменения частоты питания с помощью частотно-регулируемого привода. | Скорость двигателя можно регулировать, используя переменное сопротивление ротора, а также устройства частотно-регулируемого привода. |
| Источник входного напряжения не изменяет скорость или крутящий момент синхронного двигателя. | Источник входного напряжения может использоваться для изменения крутящего момента и скорости двигателя. |
| Колебания основного напряжения питания не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Начальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Операция сложная. | Операция проста и удобна для пользователя. |
| Если предлагают высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью частотно-регулируемого привода. | Работать на малой скорости довольно сложно. |
| Лучше всего работает на более низких оборотах, обычно ниже 300 об / мин. | Лучше всего подходит для работы на скорости выше 600 об / мин. |
| Может работать с отстающим, опережающим или единичным коэффициентом мощности, регулируя его возбуждение. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в качестве опережающего коэффициента мощности. | Его нельзя использовать для корректировки коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, резкое изменение нагрузки вызовет колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая при этом функцию коррекции коэффициента мощности. С другой стороны, асинхронные двигатели используются для высоких оборотов с регулируемой скоростью, будучи недорогими и простыми в эксплуатации.
Связанное сообщение об электрических двигателях.
Электродвигатели переменного тока от NORD DRIVESYSTEMS
Трехфазные асинхронные двигатели NORD — надежность и универсальность
NORD производит четыре различных линейки электродвигателей переменного тока для различных областей применения. В то время как двигатели с гладким корпусом идеально подходят для пищевой промышленности, двухскоростные двигатели и однофазные двигатели обеспечивают необходимую мощность для станков, насосов, конвейерных лент или вентиляторов.
Наши трехфазные асинхронные двигатели обеспечивают стандартные ступени мощности от 0,16 до 75 л.с. и отличаются непревзойденной производительностью, высоким качеством изготовления и длительным сроком службы. Двигатели переменного тока могут быть объединены с полным портфелем редукторов и приводной техники NORD для получения комплексного решения.
Преимущества наших трехфазных асинхронных двигателей:
- Долговечность
Наши стандартные двигатели обеспечивают непревзойденную защиту от электрических и механических перегрузок. - Низкие затраты на техническое обслуживание
Благодаря высокому качеству изготовления и простой конструкции затраты на техническое обслуживание сведены к минимуму. - Универсальность
Трехфазные асинхронные двигатели NORD подходят для множества применений в самых разных отраслях промышленности.
Наши однофазные двигатели: простая конструкция, надежная работа
Наши однофазные двигатели доступны в трех версиях: для простых применений мы рекомендуем экономичный однофазный двигатель со схемой Штейнмеца; для более требовательных приложений лучшим решением являются конструкции с рабочим конденсатором или рабочим и пусковым конденсаторами.
Доступны однофазные двигатели мощностью от 0,16 до 2 л.с. Они могут работать на частотах 50 или 60 Гц при 115 или 230 В и поддерживать широкий диапазон напряжения (от 220 до 240 В).
Двухскоростные двигатели: один привод, гибкие скорости
Ассортимент двигателей NORD включает двухскоростные двигатели для различных применений, требующих гибкости. Эти приводы позволяют работать с двумя или более фиксированными скоростями. Мы поставляем этот тип двигателя в 4/2 полюсном, 8/4 полюсном, 8/2 полюсном и 6/4 полюсном исполнении и, при необходимости, с обмоткой Даландера.
Двигатели с гладким корпусом для применений, где необходимы санитария и чистота
Трехфазные асинхронные двигателиNORD также доступны в версии с промывкой и гладкой поверхностью. Наши двигатели с гладким корпусом очень легко чистятся и идеально подходят для использования в пищевой и фармацевтической промышленности. Они идеально подходят для комбинации с алюминиевыми линейными, угловыми коническими редукторами NORD и червячными редукторами SMI для комплексного решения по промывке.