Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток.
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера).
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами.
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера.
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Бесщеточные генераторы. Почему они мало используются
Если автомобильный генератор выходит из строя, то самой распространенной причиной является износ щеточного узла. Однако давным-давно изобретены бесщеточные генераторы – почему же они до сих пор не вытеснили своих якобы менее продвинутых «конкурентов»?
Самая распространенная и массовая на сегодня конструкция автомобильного генератора – с использованием графитовых щеток, подающих напряжение на обмотку ротора (так называемую «катушку возбуждения») через пару вращающихся скользящих контактов в виде медных колец на валу ротора.
В такой конструкции крайне просто и эффективно реализовано поддержание стабильного напряжения в бортсети автомобиля на любых оборотах двигателя и, соответственно, генератора – электронный блок стабилизации напряжения (который по старинке принято именовать «реле-регулятором») отслеживает уровень напряжения на выходе и уменьшает или увеличивает ток в катушке возбуждения. Как только напряжение проседает, ток увеличивается. Как только оно приближается к верхнему пределу 14,2 вольта – уменьшается. Этот процесс идет быстро и непрерывно, и в результате мы имеем стабильное напряжение и на холостых оборотах, и на высокой скорости.
Щеточный узел – сухой и слабо защищенный от песка и влаги. А все, что открыто и трется без смазки, постепенно изнашивается и отказывает. Именно щеточный узел является наиболее частым источником выходов генератора из строя.
Однако в последние годы слово «БЕСщеточный» (или его аналог «бесколлекторный») на слуху у «широких народных масс» (с) – оно стало известно даже относительно далеким от техники людям. В самых разных сферах быта активно пропагандируются бесщеточные электромоторы – сегодня на них летают квадрокоптеры, крутятся шуруповерты, косят газоны триммеры и работают прочие механизмы и гаджеты. Даже откровенным гуманитариям уже успешно внушили, что «щетки – это плохо: они изнашиваются, отказывают, греются и вызывают потери тока». Почему же в автомобильном генераторе щеточный узел до сих пор не исчез, тогда как в последнее время от него все чаще отказываются даже в моторчиках дешевых детских игрушек?!
Может быть, потому, что на бесколлекторные (или же бесщеточные – как больше нравится) технологии массово переводятся электромоторы, а мы-то ведем речь про генератор? Нет, дело не в этом. Тут как раз никаких препятствий нет. Электромотор и электрогенератор – чрезвычайно похожие по своей сути электрические машины, вдобавок зачастую обратимые: мотор способен вырабатывать ток, если его вращать принудительно, а генератор может выполнять роль мотора, если на него опять же подать ток извне.
Тут как раз никаких препятствий нет. Электромотор и электрогенератор – чрезвычайно похожие по своей сути электрические машины, вдобавок зачастую обратимые: мотор способен вырабатывать ток, если его вращать принудительно, а генератор может выполнять роль мотора, если на него опять же подать ток извне.
Использовать бесщеточный генератор в автомобиле можно, это давно реализовано и практикуется. Однако выпускаются подобные генераторы весьма ограничено и массовыми почему-то не стали… Почему?
Сделать автомобильный генератор бесщеточным в принципе не так сложно. Для чего, собственно, нужны щетки? Чтобы подать через них питание 12 вольт на катушку возбуждения внутри вращающегося ротора. После чего сегментный ротор с катушкой, на которую подан постоянный ток от аккумулятора, становится многополюсным электромагнитом и порождает возникновение тока в неподвижной обмотке – в статоре.
Убрать скользящий щеточный контакт в автомобильном генераторе возможно за счет особой конструкции ротора. Для этого ротор делают удлиненным, а катушку возбуждения выполняют в виде внешнего кольца и неподвижно закрепляют на статоре. Ведь для работы генератора ротор должен стать магнитом, а как намагничивать ротор – катушкой внутри, или катушкой снаружи – непринципиально…
Для этого ротор делают удлиненным, а катушку возбуждения выполняют в виде внешнего кольца и неподвижно закрепляют на статоре. Ведь для работы генератора ротор должен стать магнитом, а как намагничивать ротор – катушкой внутри, или катушкой снаружи – непринципиально…
Первые бесщеточные генераторы с неподвижной катушкой возбуждения встречались на автомобилях и полвека назад, и даже раньше. Как правило, ставили их на коммерческий транспорт (дальнобойные грузовики) и сельскохозяйственные и строительные машины (комбайны, трактора, бульдозеры и т. п.). Первым была важна увеличенная надежность и уменьшенная вероятность отказов на длинных перегонах пути, а вторым – защита от постоянно сопровождающих их при работе абразивной пыли и влаги, способных быстро убивать щеточный узел, проникая в генератор через вентиляционные щели. В принципе, в ограниченных объемах используются они в подобных машинах и по сей день.
Однако, согласитесь: генератор, не боящийся воды и пыли, с увеличенным сроком службы благодаря отказу от трущихся насухую деталей – это весьма недурственно! Причем неплохо для любого генератора, а не только для установленного на грузовике или комбайне! Почему же технология не распространилась на массовый легковой сегмент? Причин тут несколько.
- Технология производства бесщеточных генераторов более многоэтапна, и генераторы в конечном итоге существенно дороже.
- При сопоставимых технологиях производства (без дорогостоящих инноваций) бесщеточный генератор в итоге получается крупнее и тяжелее щеточного с теми же характеристиками.
- Большинство грузовых и сельскохозяйственных «бесщеточников» имели относительно узкий диапазон рабочих оборотов, на которых они эффективны, и на холостом ходу и просто на пониженных передачах толком не заряжали аккумулятор.
- Современные «бесщеточники» существенно усложнились, дабы сохранить компактность, одновременно получив возможность выдавать большие токи с малых оборотов и не бояться оборотов высоких. Вдобавок к неподвижной обмотке возбуждения в конструкцию добавились постоянные магниты, позволяющие увеличить токоотдачу на малых оборотах, специальные размагничивающие обмотки, нейтрализующие действие постоянных магнитов на высоких оборотах, многофазные статоры, усложненные диодные мосты.


Все это и ряд других факторов ограничивали и продолжают ограничивать распространение таких генераторов. А после эволюционной оптимизации генераторов со щетками (ставших мощнее, компактнее, линейнее и т. п.) преимущества «бесщеточников» оказались еще менее выраженными. Несмотря на явно изнашивающиеся пары трения медь-графит, реально щеточные генераторы ходят весьма долго и их не принято считать потенциально проблемным узлом автомобиля, требующим инновационных вмешательств.
Впрочем, в ряде случаев бесщеточные генераторы имеют актуальность не только на фурах и тракторах. К примеру, щеточного узла нет на некоторых генераторах ряда дизельных кроссоверов BMW и Mercedes. В их моторах применяются генераторы повышенной мощности (180-190 ампер) с водяным охлаждением, которые прикручиваются своей задней крышкой к крышке водяной рубашки двигателя с соответствующим отверстием, как бы «затыкая его своим задом», и, таким образом, частично омываются антифризом. В конструкции мощных водоохлаждаемых генераторов щетки сильно затрудняют компоновку и обслуживание, поэтому от них иногда отказываются.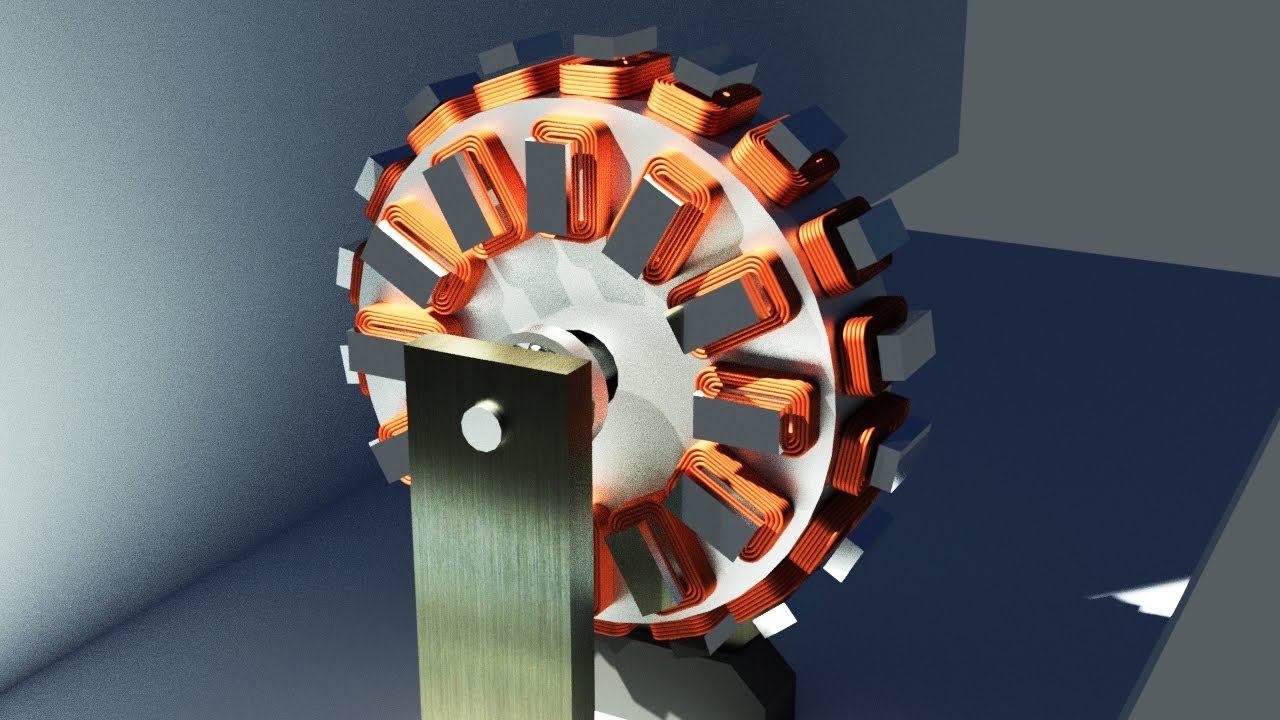 Также серийно встречаются такие генераторы в некоторых комплектациях серьезных рамных внедорожников типа Nissan Patrol. А уазисты любят внедрять в свои тюнингованные «котлеты» не боящиеся купания в болоте 110-амперные бесщеточные генераторы от автобусов ПАЗ. Ну а алтайский завод тракторного электрооборудования еще с советских времен (и, кажется, по сей день!) производит небольшими тиражами бесщеточный генератор для моделей ВАЗ классического (01-07) и раннего переднеприводного (08-099) семейств.
Также серийно встречаются такие генераторы в некоторых комплектациях серьезных рамных внедорожников типа Nissan Patrol. А уазисты любят внедрять в свои тюнингованные «котлеты» не боящиеся купания в болоте 110-амперные бесщеточные генераторы от автобусов ПАЗ. Ну а алтайский завод тракторного электрооборудования еще с советских времен (и, кажется, по сей день!) производит небольшими тиражами бесщеточный генератор для моделей ВАЗ классического (01-07) и раннего переднеприводного (08-099) семейств.
Тем не менее в конечном итоге все решает экономика и отчасти инжиниринг. На сегодняшний день в массовом потребительском автопроме надежность простейшего щеточного генератора принята за образец баланса цены, живучести и ремонтопригодности. И отходят от этого канона лишь в относительно редких случаях, когда проектирование технически сложного, продвинутого и достаточно дорогого автомобиля неизбежно требует усложненных и недешевых решений…
бесколлекторный генератор — это..
 . Что такое бесколлекторный генератор?
. Что такое бесколлекторный генератор?- бесколлекторный генератор
brushless generator
Англо-русский словарь технических терминов. 2005.
- бесклинкерный шлаковый цемент
- бесколлекторный двигатель
Смотреть что такое «бесколлекторный генератор» в других словарях:
Униполярный генератор — бесколлекторный генератор постоянного тока, действие которого основано на явлении униполярной индукции (См. Униполярная индукция). На статоре У. г. (рис.) расположены (соосно с валом генератора) две тороидальные катушки возбуждения,… … Большая советская энциклопедия
Электродвигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Honda Insight — Honda Insight … Википедия
ДПТ — Рис.
1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … ВикипедияДвигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Постоянного тока электродвигатель — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
VisSim — Семантика: Модульность Класс языка: Визуальное программирование Появился в: 1989 Автор(ы): Visual Solutions … Википедия
 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … ВикипедияБесколлекторный генератор постоянного тока
Полезная модель относится к области электрических машин постоянного тока и может быть использована на промышленных предприятиях и электрическом железнодорожном транспорте, а также на других видах электрического транспорта в качестве высоковольтного источника постоянного тока.
Задачей полезной модели является повышение мощности генератора за счет сглаживания пульсаций напряжения, и повышение надежности работы генератора за счет выполнения приводного двигателя в виде асинхронного двигателя или двигателя постоянного тока
Технический результат достигается тем, что в бесколлекторный генератор постоянного тока, содержащий статор с парой полюсов, на которых размещены обмотки возбуждения, якорь с якорными обмотками, закрепленный на валу генератора, который соединен с валом приводного двигателя, подключенного к источнику питания, контактное устройство, выполненное в виде двух сплошных проводящих контактных колец с неподвижно установленными на них токосъемными скользящими щетками, согласно заявляемой полезной модели, введен блок управления с полномостовыми инверторами и пакетом программ управления работой генератора, на паре полюсов статора размещены две автономные, независимые друг от друга, первая и вторая обмотки возбуждения, соединенные с блоком управления, который подключен к источнику питания, причем на якоре также размещены две автономные, независимые друг от друга, первая и вторая якорные обмотки, при этом начало первой и второй якорных обмоток присоединено к первому сплошному проводящему контактному кольцу, а конец первой и второй якорных обмоток присоединен ко второму сплошному проводящему контактному кольцу, источник питания представляет собой источник постоянного тока, питающий через блок управления обмотки возбуждения постоянным током и выполненный с возможностью преобразования постоянного напряжения в переменное, а приводным двигателем является двигатель постоянного тока или асинхронный двигатель, при этом блок управления выполнен с возможностью управления переключением полярности постоянного тока в обмотках возбуждения в зависимости от нахождения якорных обмоток в верхнем или нижнем положениях. 4 ил.
4 ил.
Полезная модель относится к области электрических машин постоянного тока и может быть использована на промышленных предприятиях и электрическом железнодорожном транспорте, а также на других видах электрического транспорта в качестве высоковольтного источника постоянного тока.
Наиболее близким техническим решением является генератор постоянного тока по патенту РФ 2396676, МПК H02K 23/26, H02K 23/68, 10.08.2010, содержащий статор с полюсами, на которых размещены обмотки возбуждения, якорь с якорной обмоткой, закрепленный на валу генератора, соединенном с валом приводного синхронного двигателя, подключенным к источнику переменного напряжения, контактное устройство, выполненное в виде двух проводящих сплошных контактных колец, с неподвижно установленными на них токосъемными скользящими щетками, при этом к одному из проводящих контактных колец присоединено начало якорной обмотки, а ко второму проводящему контактному кольцу подключен конец якорной обмотки, причем обмотки возбуждения генератора подключены, к источнику переменного напряжения.
Недостатком данного генератора является его невысокая мощность из-за невысокого значения электродвижущей силы (ЭДС) в результате пульсаций напряжения и тока на выходе генератора, обусловленных переменным синусоидальным током, подаваемым в обмотку возбуждения.
Другим недостатком генератора является его невысокая надежность из-за выполнения приводного двигателя в виде синхронного электродвигателя, что обуславливает необходимость поддержания частоты возбуждающего напряжения генератора с частотой вращения его ротора.
Задачей полезной модели является повышение мощности генератора за счет сглаживания пульсаций напряжения, и повышение надежности работы генератора за счет выполнения приводного двигателя в виде асинхронного двигателя или двигателя постоянного тока
Технический результат достигается тем, что в бесколлекторный генератор постоянного тока, содержащий статор с парой полюсов, на которых размещены обмотки возбуждения, якорь с якорными обмотками, закрепленный на валу генератора, который соединен с валом приводного двигателя, подключенного к источнику питания, контактное устройство, выполненное в виде двух сплошных проводящих контактных колец с неподвижно установленными на них токосъемными скользящими щетками, согласно заявляемой полезной модели, введен блок управления с полномостовыми инверторами и пакетом программ управления работой генератора, на паре полюсов статора размещены две автономные, независимые друг от друга, первая и вторая обмотки возбуждения, соединенные с блоком управления, который подключен к источнику питания, причем на якоре также размещены две автономные, независимые друг от друга, первая и вторая якорные обмотки, при этом начало первой и второй якорных обмоток присоединено к первому сплошному проводящему контактному кольцу, а конец первой и второй якорных обмоток присоединен ко второму сплошному проводящему контактному кольцу, источник питания представляет собой источник постоянного тока, питающий через блок управления обмотки возбуждения постоянным током и выполненный с возможностью преобразования постоянного напряжения в переменное, а приводным двигателем является двигатель постоянного тока или асинхронный двигатель, при этом блок управления выполнен с возможностью управления переключением полярности постоянного тока в обмотках возбуждения в зависимости от нахождения якорных обмоток в верхнем или нижнем положениях.
Сущность полезной модели поясняется чертежами, где на фиг.1 изображена электрическая схема генератора, на фиг.2, 3 показаны положения якоря генератора, на котором расположены первая и вторая якорные обмотки, а именно, на фиг.2 — при верхнем и нижнем положениях, соответственно, первой и второй якорных обмоток, когда угол поворота якоря равен 90°, на фиг.3 — при нижнем и верхнем положениях, соответственно, первой и второй якорных обмоток, когда угол поворота якоря равен 270°, на фиг.4 — зависимость ЭДС (е) от угла поворота якоря ().
Цифрами на фиг.1, 2, 3 обозначены:
1 — статор,
2 — пара полюсов,
3а — первая обмотка возбуждения,
3б — вторая обмотка возбуждения,
4 — якорь,
5а — первая якорная обмотка,
5б — вторая якорная обмотка,
6 — контактное устройство,
7 — вал генератора,
8 — первое сплошное проводящее контактное кольцо,
9 — второе сплошное проводящее контактное кольцо,
10 — токосъемная скользящая щетка первого проводящего контактного кольца,
11 — токосъемная скользящая щетка второго проводящего контактного кольца,
12 — нагрузочное сопротивление,
13 — приводной двигатель (двигатель постоянного тока или асинхронный двигатель),
14 — вал приводного двигателя,
15 — источник питания (источник постоянного тока),
16 — блок управления.
Бесколлекторный генератор постоянного тока содержит статор 1 с нарой полюсов 2, на которых размещены обмотки возбуждения 3а и 3б, якорь 4 с якорными обмотками 5а и 5б, закрепленный на валу 7 генератора, который соединен с валом 14 приводного двигателя 13, подключенного к источнику 15 питания, а также контактное устройство 6, закрепленное на валу 7 генератора. Контактное устройство 6 выполнено в виде двух сплошных проводящих контактных колец, первого 8 и второго 9. На сплошных проводящих контактных кольцах 8 и 9, соответственно, неподвижно установлены токосъемные скользящие щетки 10 и 11, с которых снимается постоянное напряжение генератора UA , к которому подключено нагрузочное сопротивление 12.
Отличием предлагаемого бесколлекторного генератора постоянного тока является то, что в него введен блок 16 управления с полномостовыми инверторами (на чертеже условно не показаны) и пакетом программ управления работой генератора. Программа управления составляется заранее для заданного режима работы и в процессе работы бесколлекторного генератора остается постоянной. На паре полюсов 2 статора 1 размещены две автономные, независимые друг от друга, обмотки возбуждения, соответственно, на одном полюсе первая 3a и на другом полюсе вторая 3б, управляемые, соответственно, первым и вторым полномостовыми инверторами (на чертеже условно не показаны) блока 16 управления. Каждая обмотка возбуждения 3а и 3б, токи в которых переключаются независимыми первым и вторым полномостовыми инверторами, включена в полнотактную схему преобразования, которая управляет направлением тока в обмотке возбуждения в зависимости от места нахождения якорных обмоток 5а и 5б — в верхней или нижней части ротора, т.е. в блоке 16 управления первый полномостовой инвертор управляет направлением тока в первой обмотке возбуждения 3а в зависимости от места нахождения первой якорной обмотки 5а, а второй полномостовой инвертор управляет направлением тока во второй обмотке возбуждения 3б в зависимости от места нахождения второй якорной обмотки 56.
На паре полюсов 2 статора 1 размещены две автономные, независимые друг от друга, обмотки возбуждения, соответственно, на одном полюсе первая 3a и на другом полюсе вторая 3б, управляемые, соответственно, первым и вторым полномостовыми инверторами (на чертеже условно не показаны) блока 16 управления. Каждая обмотка возбуждения 3а и 3б, токи в которых переключаются независимыми первым и вторым полномостовыми инверторами, включена в полнотактную схему преобразования, которая управляет направлением тока в обмотке возбуждения в зависимости от места нахождения якорных обмоток 5а и 5б — в верхней или нижней части ротора, т.е. в блоке 16 управления первый полномостовой инвертор управляет направлением тока в первой обмотке возбуждения 3а в зависимости от места нахождения первой якорной обмотки 5а, а второй полномостовой инвертор управляет направлением тока во второй обмотке возбуждения 3б в зависимости от места нахождения второй якорной обмотки 56.
Полномостовые инверторы блока 16 управления питают обмотки возбуждения 3а и 3б постоянным током, меняющим свою полярность с положительной полярности на отрицательную через 180° по программе, установленной в блоке 16 управления.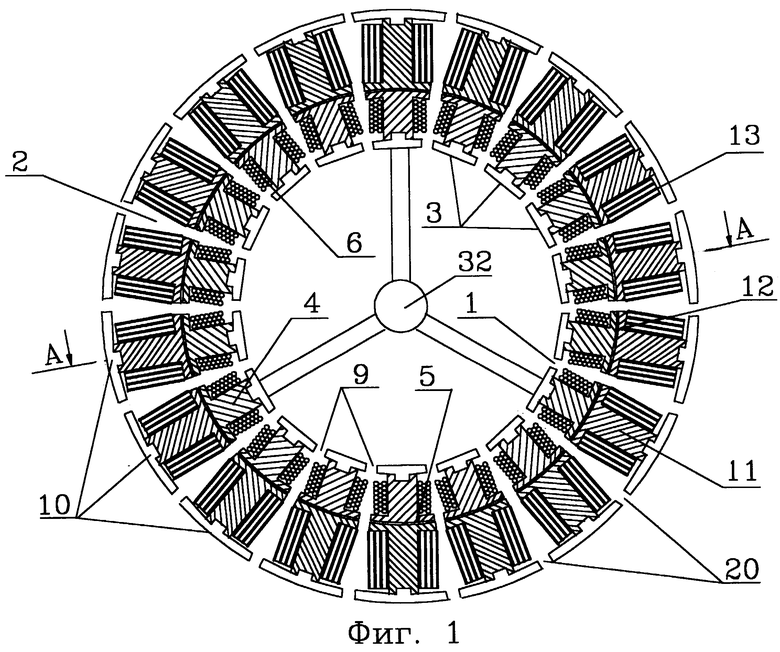 С вала 7 генератора информация об угле положения вала передается в блок 16 управления, где по результатам этой информации осуществляется управление токами обмоток 3а и 3б возбуждения, а также общее управление режимами работы генератора.
С вала 7 генератора информация об угле положения вала передается в блок 16 управления, где по результатам этой информации осуществляется управление токами обмоток 3а и 3б возбуждения, а также общее управление режимами работы генератора.
На якоре 4 также размещены две автономные, независимые друг от друга, первая 5а и вторая 5б якорные обмотки, разнесенные на 180°, т.е. они разнесены равномерно друг от друга на 90° от начала и конца каждой обмотки. Начало первой 5а и второй 5б якорных обмоток присоединено к первому сплошному проводящему контактному кольцу 8, а конец первой 5а и второй 5б якорных обмоток присоединен ко второму сплошному проводящему контактному кольцу 9, т.е. якорные обмотки 5а и 5б соединяются параллельно и ток нагрузки повышается до двух раз, а мощность на выходе повышается в два раза.
Приводным двигателем 13 является двигатель постоянного тока или асинхронный двигатель.
Блок 16 управления подключен к источнику 15 питания. К источнику 15 питания подключены, через блок 16 управления, первая 3а и вторая 3б обмотки возбуждения, на которые подается постоянное напряжение UВ возбуждения, т. е. источник 15 питания представляет собой источник постоянного тока, питающий через блок 16 управления первую 3а и вторую 3б обмотки возбуждения постоянным током.
е. источник 15 питания представляет собой источник постоянного тока, питающий через блок 16 управления первую 3а и вторую 3б обмотки возбуждения постоянным током.
Источник 15 питания, управляемый блоком 16, выполнен с возможностью преобразования постоянного напряжения в переменное в случае, если приводным двигателя 13 является асинхронный двигатель.
Блок 16 управления выполнен с возможностью управления переключением полярности постоянного тока в обмотках 3а и 3б возбуждения в зависимости от нахождения якорных обмоток 5а и 5б в верхнем или нижнем положениях.
Рассмотрим работу бесколлекторного генератора постоянного тока при выполнении источника 15 постоянного тока с возможностью преобразования постоянного напряжения в переменное, при этом приводным двигателем 13 является асинхронный двигатель.
При включении генератора, переменное напряжение, преобразованное из постоянного напряжения, от источника 15 постоянного тока поступает на приводной асинхронный двигатель 13. Вал 14 приводного асинхронного двигателя 13 начинает вращаться против часовой стрелки с установившейся частотой. Так как число пар полюсов генератора равно единице, вал 14 приводного асинхронного двигателя 13 и, соединенный с ним, вал 7 генератора совершают один оборот за период «Т» питающего напряжения. При этом за один оборот якоря 4 изменяется направление тока в обмотках возбуждения (3а и 3б), и происходит смена полярности полюсов 2. При этом постоянство полярности ЭДС, индуктируемой под действием магнитного поля полюсов 2 в якорных обмотках 5а и 5б при вращении якоря 4, обеспечивается следующим образом.
Вал 14 приводного асинхронного двигателя 13 начинает вращаться против часовой стрелки с установившейся частотой. Так как число пар полюсов генератора равно единице, вал 14 приводного асинхронного двигателя 13 и, соединенный с ним, вал 7 генератора совершают один оборот за период «Т» питающего напряжения. При этом за один оборот якоря 4 изменяется направление тока в обмотках возбуждения (3а и 3б), и происходит смена полярности полюсов 2. При этом постоянство полярности ЭДС, индуктируемой под действием магнитного поля полюсов 2 в якорных обмотках 5а и 5б при вращении якоря 4, обеспечивается следующим образом.
В первой половине оборота якоря 4, например, при угле равном 90° (фиг.2), щетка 10, соприкасающаяся с первым сплошным проводящим контактным кольцом 8, соединенным с началом первой 5а и второй 5б якорных обмоток, имеет положительный потенциал, вследствие того, что к этой щетке подводится ток от активной стороны якорной обмотки 5а, расположенной под полюсом N, щетка 11 в этот момент времени имеет отрицательный потенциал.
При угле поворота якоря 4 равном 270° (фиг.3), когда активные стороны якорных обмоток 5а и 5б поменялись местами, полярность щеток 11 и 10 остается неизменной, так как при нижнем положении активной стороны якорной обмотки 5а и верхнем положении активной стороны якорной обмотки 5б, нижний полюс меняет свою полярность с S на N, а верхний с N на S. В результате полярность ЭДС, индуктируемой в якорных обмотках 5а и 5б при вращении якоря 4, сохраняется постоянной (фиг.4).
Блок 16 с пакетом программ управления работой генератора управляет запуском приводного асинхронного двигателя и токами возбуждения генератора.
При запуске приводного асинхронного двигателя одновременно включаются первый и второй полномостовые инверторы (на чертеже условно не показаны) блока 16 управления, которые питают обмотки 3а и 3б возбуждения постоянным током. Токи возбуждения в первой 3а и второй 3б обмотках возбуждения, наводят ЭДС, соответственно, в первой 5а и второй 5б якорных обмотках. Токи в первой 3а и второй 3б обмотках возбуждения имеют такие направления, что ЭДС совпадают с полярностями в начале первой 5а и второй 56 якорных обмоток. На фиг.2 в первой половине оборота якоря 4, при угле равном 90°, первая 5а и вторая 5б якорные обмотки находятся, соответственно, в верхнем и нижнем положениях вала ротора генератора.
На фиг.2 в первой половине оборота якоря 4, при угле равном 90°, первая 5а и вторая 5б якорные обмотки находятся, соответственно, в верхнем и нижнем положениях вала ротора генератора.
Далее, с перемещением вала 7 генератора еще на 180° (фиг.3) полномостовые инверторы блока 16 управления вызывают токи возбуждения в обмотках 3а и 3б возбуждения, но обратной полярности. Постоянный ток меняет свою полярность (с положительной полярности на отрицательную полярность) через 180° в соответствии с программой управления работы генератора. Эти токи возбуждения в первой 3а и второй 3б обмотках возбуждения, наводят ЭДС, соответственно, в первой 5а и второй 5б якорных обмотках, совпадающие с ранее возбужденными полярностями.
Так как па якоре 4 размещены две автономные, независимые друг от друга, первая 5а и вторая 5б якорные обмотки, разнесенные на 180° (они разнесены равномерно друг от друга на 90° от начала и конца каждой обмотки), выходная ЭДС генератора получается без пульсаций, такой, как она представлена на фиг. 4 (без учета потерь в обмотке якоря, которой можно пренебречь).
4 (без учета потерь в обмотке якоря, которой можно пренебречь).
В результате со щеток 10 и 11, контактирующих со сплошными проводящими контактными кольцами 8 и 9, на выход генератора, к которому подключено нагрузочное сопротивление 12, подается постоянное напряжение UA .
Использование заявляемой полезной модели позволит, по сравнению с прототипом, повысить мощность и надежность работы генератора за счет введения в него блока управления с полномостовыми инверторами и пакетом программ управления работой генератора, размещением на полюсах статора двух автономных, независимых друг от друга, первой и второй обмоток возбуждения, управляемых двумя независимыми первым и вторым полномостовыми инверторами, размещением на якоре двух автономных, независимых друг от друга, первой и второй якорных обмоток, разнесенных на 180°, выполнения источника питания в виде источника постоянного тока с возможностью преобразования постоянного напряжения в переменное и питающего через блок управления обмотки возбуждения постоянным током, а приводного двигателя — в виде асинхронного двигателя или двигателя постоянного тока.
Бесколлекторный генератор постоянного тока, содержащий статор с парой полюсов, на которых размещены обмотки возбуждения, якорь с якорными обмотками, закрепленный на валу генератора, который соединен с валом приводного двигателя, подключенного к источнику питания, контактное устройство, выполненное в виде двух сплошных проводящих контактных колец с неподвижно установленными на них токосъемными скользящими щетками, отличающийся тем, что в него введен блок управления с полномостовыми инверторами и пакетом программ управления работой генератора, на паре полюсов статора размещены две автономные, независимые друг от друга, первая и вторая обмотки возбуждения, соединенные с блоком управления, который подключен к источнику питания, причем на якоре также размещены две автономные, независимые друг от друга, первая и вторая якорные обмотки, при этом начало первой и второй якорных обмоток присоединено к первому сплошному проводящему контактному кольцу, а конец первой и второй якорных обмоток присоединен ко второму сплошному проводящему контактному кольцу, источник питания представляет собой источник постоянного тока, питающий через блок управления обмотки возбуждения постоянным током и выполненный с возможностью преобразования постоянного напряжения в переменное, а приводным двигателем является двигатель постоянного тока или асинхронный двигатель, при этом блок управления выполнен с возможностью управления переключением полярности постоянного тока в обмотках возбуждения в зависимости от нахождения якорных обмоток в верхнем или нижнем положениях.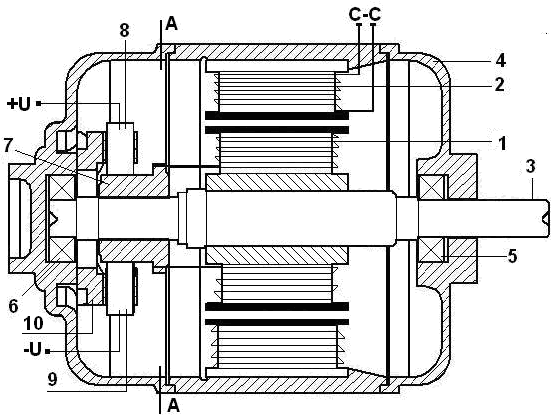
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателяКак видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
рис. 3).
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесколлекторный двигатель в компьютерном дисководеПринцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор.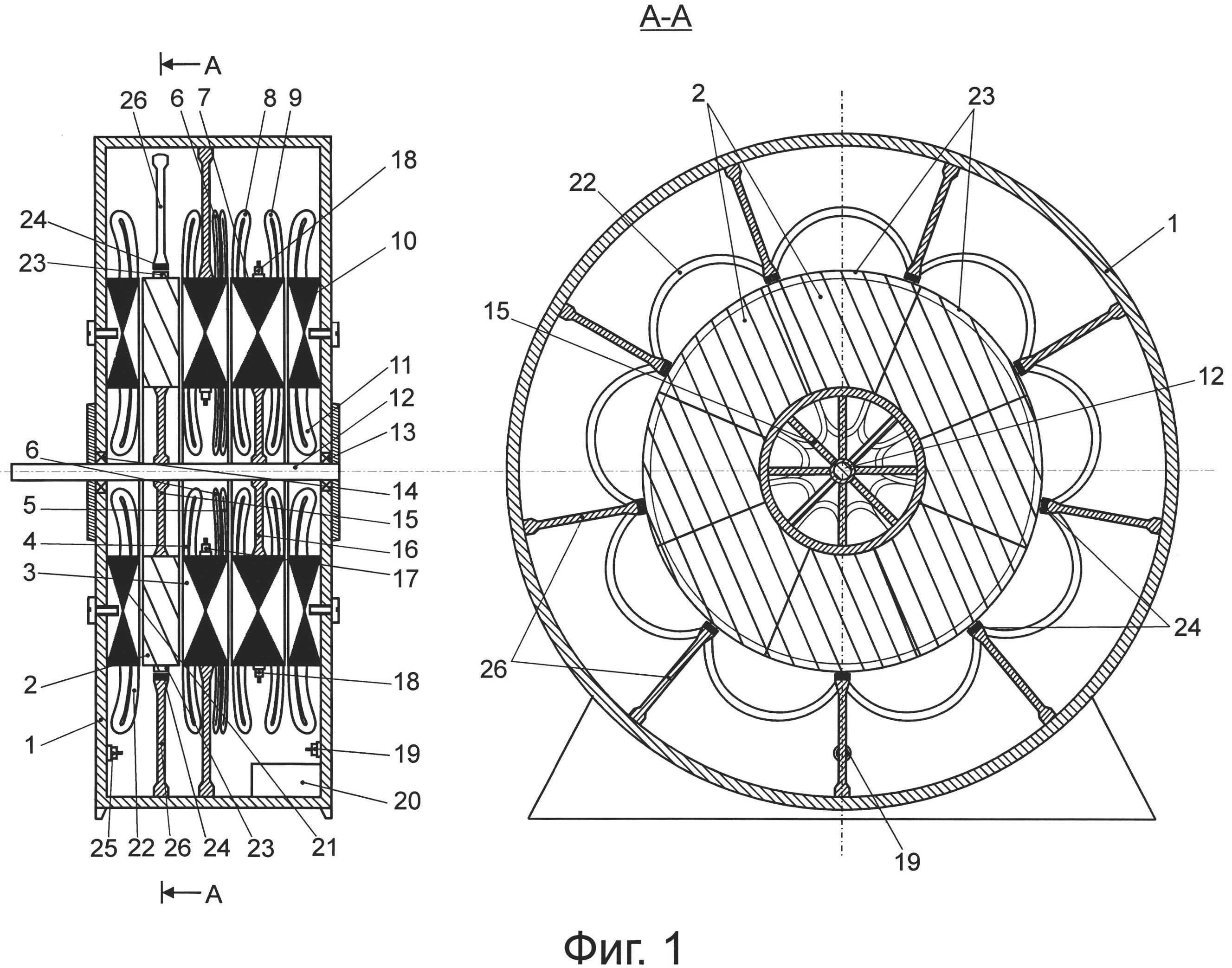 В результате питание подается на другую обмотку и цикл повторяется.
В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.

Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
 Далее цикл повторяется.
Далее цикл повторяется.В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.

Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Патент №2303849 — Бесколлекторный синхронный генератор с постоянными магнитами
Настоящее изобретение относится к области электротехники, а именно к бесколлекторным электрическим машинам, в частности электрогенераторам постоянного тока, и может быть использовано в любой области науки и техники, где требуются автономные источники питания. Технический результат — создание компактного высокоэффективного электрического генератора, который позволяет при сохранении относительно простой и надежной конструкции широко варьировать выходные параметры электрического тока в зависимости от условий эксплуатации. Сущность изобретения состоит в том, что бесколлекторный синхронный генератор с постоянными магнитами состоит из одной или нескольких секций, каждая из которых включает ротор с круговым магнитопроводом, на котором с одинаковым шагом закреплено четное количество постоянных магнитов, статор, несущий четное число подковообразных электромагнитов, расположенных попарно напротив друг друга и имеющих по две катушки с последовательно встречным направлением обмотки, устройство для выпрямления электрического тока. Постоянные магниты закреплены на магнитопроводе таким образом, что образуют два параллельных ряда полюсов с продольно и поперечно чередующейся полярностью. Электромагниты сориентированы поперек названных рядов полюсов так, что каждая из катушек электромагнита расположена над одним из параллельных рядов полюсов ротора. Количество полюсов в одном ряду, равное n, удовлетворяет соотношению: n=10+4k, где k — целое число, принимающее значения 0, 1, 2, 3 и т.д. Количество электромагнитов в генераторе обычно не превышает число (n-2).
Сущность изобретения состоит в том, что бесколлекторный синхронный генератор с постоянными магнитами состоит из одной или нескольких секций, каждая из которых включает ротор с круговым магнитопроводом, на котором с одинаковым шагом закреплено четное количество постоянных магнитов, статор, несущий четное число подковообразных электромагнитов, расположенных попарно напротив друг друга и имеющих по две катушки с последовательно встречным направлением обмотки, устройство для выпрямления электрического тока. Постоянные магниты закреплены на магнитопроводе таким образом, что образуют два параллельных ряда полюсов с продольно и поперечно чередующейся полярностью. Электромагниты сориентированы поперек названных рядов полюсов так, что каждая из катушек электромагнита расположена над одним из параллельных рядов полюсов ротора. Количество полюсов в одном ряду, равное n, удовлетворяет соотношению: n=10+4k, где k — целое число, принимающее значения 0, 1, 2, 3 и т.д. Количество электромагнитов в генераторе обычно не превышает число (n-2). 12 з.п. ф-лы, 9 ил.
12 з.п. ф-лы, 9 ил.
Классификация патента
| Код | Наименование |
|---|---|
| МПК H02K 21/14 | Синхронные двигатели и генераторы с постоянными магнитами — с магнитами, вращающимися внутри якоря |
| МПК H02K 21/18 | Синхронные двигатели и генераторы с постоянными магнитами — с подковообразным сердечником якоряс униполярным взаимодействием 21/20 |
Brushless gas & diesel generator capacitor avr cbb61 350v 24uf 50/60hz e212600 Sale
Доставка
Общее расчетное время, необходимое для получения заказа, показано ниже:
- Вы размещаете свой заказ
- (Время обработки)
- Мы отправляем ваш заказ
- (Время доставки)
- Доставка!
Общее расчетное время доставки
Общее время доставки рассчитывается с момента размещения вашего заказа до момента его доставки. Общее время доставки разбито на время обработки и время доставки.
Общее время доставки разбито на время обработки и время доставки.
Время обработки: Время, необходимое для подготовки вашего(их) товара (ов) для отправки из нашего склада. Это включая подготовку ваших товаров, проверку качества и упаковку для отправки.
Время доставки: Время нужно вашему(им) товару(ам) для отправления из нашего склада в вашего назначения.
Рекомендуемые способы доставки для вашей страны/региона приведены ниже:
Доставка до: Отправка изЭтот склад не может быть отправлен к вам.
| Метод(ы) доставки | Срока доставки | Информация о треке |
|---|
Примечание:
(1) Время доставки, указанное выше, относится к расчетному времени рабочих дней, которое будет отправлена после отправки заказа.
(2) Рабочие дни не включают субботу/воскресенье и любые праздничные дни.
(3) Эти оценки основаны на нормальных обстоятельствах и не являются гарантией сроков доставки.
(4) Мы не несем ответственности за сбои или задержки в доставке в результате любого форс-мажорного события, такого как стихийное бедствие, непогоды, войны, таможенные вопросы и любые другие события, находящиеся вне нашего прямого контроля.
(5) Ускоренная доставка не может использоваться для адресов PO Box
расчетные налоги:предполагаемые налоги: может применяться налог на товары и услуги.
Способ оплаты
Мы поддерживаем следующие способы оплаты.Нажмите для получения дополнительной информации, если вы запутались в как платить.*В настоящее время мы предлагаем COD платежи для Саудовской Аравии, Объединенных Арабских Эмиратов, Кувейта, Омана, Бахрейна, Таиланда, Сингапура, Малайзии, Филиппин, Индонезии. Мы отправим код подтверждения на ваш мобильный телефон, чтобы подтвердить правильность ваших контактных данных. Пожалуйста, убедитесь, что вы следуете всем инструкциям, содержащимся в сообщении.
Мы отправим код подтверждения на ваш мобильный телефон, чтобы подтвердить правильность ваших контактных данных. Пожалуйста, убедитесь, что вы следуете всем инструкциям, содержащимся в сообщении.
*Оплата с рассрочкой (кредитная карта) или Boleto Bancário доступна только для заказов с доставкой в Бразилии.
Хорошая вибрация: безлопастные турбины могут принести энергию ветра в ваш дом | Возобновляемая энергия
Гигантские ветряные электростанции, расположенные вдоль холмов и берегов, — не единственный способ использовать силу ветра, говорят пионеры зеленой энергетики, которые планируют заново изобрести энергию ветра, отказавшись от необходимости в турбинных башнях, лопастях и даже ветре.
«Мы не против традиционных ветряных электростанций», — говорит Давид Яньес, изобретатель Vortex Bladeless. Его стартап из шести человек, расположенный недалеко от Мадрида, впервые разработал конструкцию турбины, которая может использовать энергию ветра без широких белых лопастей, которые считаются синонимом энергии ветра.
Дизайн недавно получил одобрение государственной энергетической компании Норвегии Equinor, которая включила Vortex в список 10 самых интересных стартапов в энергетическом секторе. Equinor также предложит поддержку в развитии стартапов в рамках своей программы технического акселератора.
Безлопастные турбины стоят на высоте 3 метра и представляют собой цилиндр с закругленной вершиной, закрепленный вертикально с помощью упругого стержня. Неподготовленному глазу кажется, что он качается взад и вперед, как игрушку на приборной панели автомобиля. На самом деле он разработан, чтобы колебаться в пределах диапазона ветра и генерировать электричество от вибрации.
Это уже вызвало недоумение на форуме Reddit, где турбину сравнивали с гигантской вибрирующей секс-игрушкой, или «скайбратором». Безошибочно фаллический дизайн собрал на сайте более 94 000 оценок и 3500 комментариев. Самый популярный комментарий предполагает, что подобное устройство может быть найдено в ящике комода вашей матери. Он получил 20 000 положительных оценок пользователей Reddit.
Он получил 20 000 положительных оценок пользователей Reddit.
«Наша технология обладает различными характеристиками, которые могут помочь заполнить пробелы, в которых традиционные ветряные электростанции могут не подходить», — говорит Яньес.
Эти пробелы могут включать городские и жилые районы, где влияние ветряной электростанции было бы слишком большим, а пространство для ее строительства было бы слишком маленьким. Он отражает ту же тенденцию к установке небольших локальных генераторов энергии, что помогло домам и компаниям по всей стране сэкономить на счетах за электроэнергию.
«Это могло быть ответом ветровой энергии на домашние солнечные панели», — говорит Яньес.
«Они хорошо дополняют друг друга, потому что солнечные панели производят электроэнергию в течение дня, а скорость ветра, как правило, выше ночью», — говорит он.«Но главное преимущество технологии заключается в снижении ее воздействия на окружающую среду, визуального воздействия, а также затрат на эксплуатацию и техническое обслуживание турбины».
Турбина не представляет опасности для миграций птиц или дикой природы, особенно при использовании в городских условиях. Для людей, живущих или работающих поблизости, турбина будет создавать шум с частотой, практически не обнаруживаемой людьми.
«Сегодня турбина небольшая и вырабатывает небольшое количество электроэнергии. Но мы ищем промышленного партнера, который расширил бы наши планы до 140-метровой турбины с мощностью 1 мегаватт », — говорит Яньес.
Vortex — не единственный стартап, который надеется заново изобрести энергию ветра. Alpha 311, начавшаяся в садовом сарае в Уитстабле, Кент, начала производство небольшой вертикальной ветряной турбины, которая, по ее утверждению, может вырабатывать электричество без ветра.
Двухметровая турбина, сделанная из переработанного пластика, предназначена для установки на существующие уличные фонари и вырабатывает электричество, поскольку проезжающие машины вытесняют воздух. Независимое исследование, проведенное по заказу компании, показало, что каждая турбина, установленная вдоль автомагистрали, может вырабатывать столько же электроэнергии, сколько 20 квадратных метров солнечных панелей, что более чем достаточно, чтобы держать уличный фонарь включенным, а также обеспечивать питание местной энергосистемы.
Уменьшенная версия турбины высотой менее 1 метра будет установлена на O2 Arena в Лондоне, где она поможет вырабатывать чистую электроэнергию для 9 миллионов человек, которые посещают развлекательные заведения в течение обычного года.
«Хотя наши турбины можно разместить где угодно, оптимальное расположение — рядом с шоссе, где они могут быть встроены в существующую инфраструктуру. Нет необходимости что-либо копать, так как они могут быть прикреплены к уже имеющимся осветительным колоннам и использовать существующие кабели для непосредственного ввода в сеть », — говорит Майк Шоу, представитель компании.«Площадь небольшая, а автомагистрали — не самое красивое место».
Пожалуй, наиболее амбициозным отклонением от стандартной ветряной турбины стал немецкий стартап SkySails, который надеется использовать бортовую конструкцию для использования энергии ветра прямо с неба.
SkySails производит большие полностью автоматизированные воздушные змеи, предназначенные для полета на высоте 400 метров, чтобы уловить силу высокогорного ветра. Во время подъема кайт тянет за трос, привязанный к лебедке и генератору на земле.Воздушный змей вырабатывает электричество, когда он поднимается в небо, и, будучи полностью разобранным, использует только часть произведенного электричества, чтобы вернуться к земле.
Стефан Рэйдж, исполнительный директор SkySails, говорит, что воздушные ветроэнергетические системы означают «минимальное воздействие на людей и окружающую среду… Системы работают очень тихо, практически не оказывают видимого воздействия на ландшафт и почти не отбрасывают тень», он добавляет.
Сегодня проект может генерировать максимальную мощность от 100 до 200 киловатт, но новое партнерство с немецкой энергетической фирмой RWE может увеличить потенциальную мощность с киловатт до мегаватт.Представитель RWE сказал, что пара в настоящее время ищет идеальное место для запуска воздушных змеев в сельской местности Германии.
Нет лезвий! Ветряная турбина в форме полюса Vortex Bladeless генерирует энергию за счет встряхивания. 2019 Bridgestone World Solar Challenge
Нет лезвий! Ветряная турбина в форме полюса Vortex Bladeless генерирует энергию за счет встряхивания.
Vortex Bladeless, безлопастный ветряк в форме полюса, был разработан испанским стартапом Vortex Bladeless Ltd.Высокотехнологичный генератор простой формы защищен шестью семействами зарегистрированных патентов.
В настоящее время компания разрабатывает прототип для коммерциализации во второй половине 2020 года по цене около 200 евро (около 25000 иен). Генератор предназначен для использования на сельскохозяйственных угодьях и в жилых районах.
Выработка энергии с помощью явления завихрения
Vortex Bladeless вибрирует, используя энергию, содержащуюся в вихрях, которые генерируются, когда ветер обходит конструкцию и преобразует механическую энергию в электричество.
Он начинает вырабатывать электроэнергию при скорости ветра 3 м / с, типичной для городских районов. Когда скорость ветра составляет 6 м / с или достаточна для того, чтобы поднимать пыль и раскачивать небольшие ветки, он может генерировать достаточно энергии. Поскольку он работает при низких и средних скоростях ветра, он является энергоэффективным, вырабатывая такое же количество энергии по цене на 45% ниже, чем у обычной 3-лопастной ветряной турбины.
Ветрогенератор дополнительно оснащен предохранительным устройством, которое автоматически прекращает работу, когда скорость ветра превышает 30–35 м / с, максимальную скорость, которую может выдержать генератор.
Простая форма для рентабельности, защиты дикой природы и низкого уровня шума.
Vortex Bladeless разработан для решения проблем традиционных ветряных турбин, таких как эксплуатационные расходы, шум и воздействие на птиц. Благодаря простой форме и небольшому весу (15 кг) снижаются затраты на материалы. Он не требует гондолы или лопастей, которые являются наиболее дорогими частями обычной ветряной турбины, а производственные затраты оцениваются примерно в 53% от стоимости производства обычной ветряной турбины.
Из-за отсутствия лопастей турбина не издает слышимого шума (он ниже 20 Гц), что исключает возможность попадания летающих объектов в плохую погоду или гибели птиц и летучих мышей от лопастей.
Еще одна замечательная особенность заключается в том, что магниты, помещенные в цилиндр, отталкиваются друг от друга, а движущиеся части не касаются друг друга. Таким образом, практически отсутствуют повреждения, вызванные износом и трением, что снижает затраты на техническое обслуживание. По расчетам компании, срок службы генератора составляет от 32 до 96 лет.
Три модели в стадии разработки
Vortex Bladeless в настоящее время разрабатываются для трех различных моделей, два из которых уже находятся в эксплуатации.
Первый в эксплуатации — Vortex Nano. Эта небольшая модель высотой 1 м и выходной мощностью 3 Вт эффективно генерирует электроэнергию, работая с солнечными батареями. Второй — Vortex Tacoma. Стоящая на высоте 2,75 м и мощностью 100 Вт, модель предназначена для использования в жилых домах и сельскохозяйственных угодьях.
Vortex Atlantis / Grand, находящийся на стадии прототипа, имеет высоту от 9 до 13 м и выходную мощность около 1 кВт. Модель предназначена для жилого / сельского самостоятельного производства и установки на заводах.
Разработка продукта на основе видео
Vortex Bladeless Ltd. была основана в 2012 году Давидом Яньесом и Раулем Мартином. Видео вдохновило их на разработку генератора.
Это было видео обрушившегося в 1940 году моста Tacoma Narrows Bridge в США, показывающее, как частота моста резонирует с частотой вихрей, вызванных высокоскоростным ветром, что привело к его обрушению.Дэвиду пришла в голову идея создать устройство, которое генерирует энергию, используя энергию, содержащуюся в вихрях.
Его идея получила высокую оценку и получила государственное финансирование Центра развития промышленных технологий (CDTI). Компания начала сотрудничество с Массачусетским технологическим институтом и Гарвардским университетом. В июне 2015 года они начали успешную краудфандинговую кампанию по найму инженеров, необходимых для реализации проекта.
Новая чистая энергия для регионов, где производство солнечной энергии невозможно.
В последние годы растет спрос на чистую энергию, такую как солнечная и ветровая, в качестве меры против глобального потепления.Чтобы удовлетворить эти требования, компания разрабатывает устройства, которые можно устанавливать где угодно, с низкими производственными затратами и простотой эксплуатации.
Совершенно новое экологически чистое энергетическое устройство по доступной для частных лиц цене, вырабатывающее электроэнергию независимо от количества часов ветра и солнечного сияния, требует меньше места и легко устанавливается. Может наступить день, когда усилия компании трансформируют рынок ветроэнергетики.
Источник: Vortex Bladeless Ltd.
Новый вертолетBell может выглядеть странно, но он может уменьшить количество аварий и шум
Посмотрите, как летит вертолет, и в центре внимания находится большой винт с волчком.В конце концов, это основной механизм, который позволяет вертолету преодолевать гравитацию и парить в воздухе по команде пилота.
Но почти на всех вертолетах есть ключевая фигура второго плана: меньший хвостовой винт. Он играет решающую роль в качестве устройства защиты от крутящего момента — он предотвращает вращение вертолета по кругу в ответ на движение несущего винта, а также позволяет пилоту регулировать направление, в котором указывает нос при зависании вертолета.
Но производитель вертолетов Bell запустил новый экспериментальный корабль с совершенно другим рулевым винтом, системой, которая в некоторых случаях может быть более безопасной, а также более тихой, чем традиционный рулевой винт.Он состоит из четырех вращающихся вентиляторов, заключенных в воздуховоды, и более того, они имеют электропитание. Это радикально отличается от того, как работает обычный хвостовой винт. Фактически, Белл утверждает, что это первый вертолет с таким хвостовым оперением, который когда-либо летал. Это своего рода гибрид обычного вертолета и того, как может выглядеть будущее одного авиационного сектора.
В типичном рулевом винте эти вращающиеся хвостовые лопасти механически связаны с двигателем самолета. Физические компоненты, такие как приводные валы, коробки передач и муфты, делают работу по его вращению.Этот ротор всегда вращается с одинаковым числом оборотов в минуту. Когда пилот хочет так или иначе ориентировать нос, нажимая на педали, лопасти рулевого винта меняют свой угол, но никогда не меняют свою скорость. И когда главный верхний винт вращается, этот хвостовой винт тоже всегда крутится.
В новом самолете Bell четыре вентилятора в задней части не связаны механически с двигателями вертолета и несущим винтом. Генераторы, подключенные к коробке передач верхнего винта, вырабатывают электрическую энергию, которая проходит через провода в хвостовой балке вертолета и приводит в действие двигатели, вращающие вентиляторы.
Эта новая установка позволяет Беллу делать некоторые интересные вещи с этим хвостом. Самым драматичным является то, что в некоторых случаях они могут просто выключить эти вентиляторы, даже когда главный ротор вращается — что невозможно сделать с обычным судном. Это означает, что когда вертолет находится на земле с вращающимся несущим винтом, нет опасного рулевого винта, вращающегося рядом с людьми. Четыре вентилятора могут быть неподвижны, так как трение между землей и измельчителем означает, что ему не нужна система противодействия крутящему моменту, чтобы предотвратить его вращение.
«Нет никакого риска получить травму от вращающегося лезвия», — говорит Эрик Синусас, программный директор новой технологии, которую Bell называет электрически распределенным анти-крутящим моментом или EDAT. Они называют новый вертолет демонстратором EDAT.
Vortex Bladeless, безлопастный ветряк в форме полюса, был разработан испанским стартапом Vortex Bladeless Ltd.Высокотехнологичный генератор простой формы защищен шестью семействами зарегистрированных патентов.
В настоящее время компания разрабатывает прототип для коммерциализации во второй половине 2020 года по цене около 200 евро (около 25000 иен). Генератор предназначен для использования на сельскохозяйственных угодьях и в жилых районах.
Выработка энергии с помощью явления завихрения
Vortex Bladeless вибрирует, используя энергию, содержащуюся в вихрях, которые генерируются, когда ветер обходит конструкцию и преобразует механическую энергию в электричество.
Он начинает вырабатывать электроэнергию при скорости ветра 3 м / с, типичной для городских районов. Когда скорость ветра составляет 6 м / с или достаточна для того, чтобы поднимать пыль и раскачивать небольшие ветки, он может генерировать достаточно энергии. Поскольку он работает при низких и средних скоростях ветра, он является энергоэффективным, вырабатывая такое же количество энергии по цене на 45% ниже, чем у обычной 3-лопастной ветряной турбины.
Ветрогенератор дополнительно оснащен предохранительным устройством, которое автоматически прекращает работу, когда скорость ветра превышает 30–35 м / с, максимальную скорость, которую может выдержать генератор.
Простая форма для рентабельности, защиты дикой природы и низкого уровня шума.
Vortex Bladeless разработан для решения проблем традиционных ветряных турбин, таких как эксплуатационные расходы, шум и воздействие на птиц. Благодаря простой форме и небольшому весу (15 кг) снижаются затраты на материалы. Он не требует гондолы или лопастей, которые являются наиболее дорогими частями обычной ветряной турбины, а производственные затраты оцениваются примерно в 53% от стоимости производства обычной ветряной турбины.
Из-за отсутствия лопастей турбина не издает слышимого шума (он ниже 20 Гц), что исключает возможность попадания летающих объектов в плохую погоду или гибели птиц и летучих мышей от лопастей.
Еще одна замечательная особенность заключается в том, что магниты, помещенные в цилиндр, отталкиваются друг от друга, а движущиеся части не касаются друг друга. Таким образом, практически отсутствуют повреждения, вызванные износом и трением, что снижает затраты на техническое обслуживание. По расчетам компании, срок службы генератора составляет от 32 до 96 лет.
Три модели в стадии разработки
Vortex Bladeless в настоящее время разрабатываются для трех различных моделей, два из которых уже находятся в эксплуатации.
Первый в эксплуатации — Vortex Nano. Эта небольшая модель высотой 1 м и выходной мощностью 3 Вт эффективно генерирует электроэнергию, работая с солнечными батареями. Второй — Vortex Tacoma. Стоящая на высоте 2,75 м и мощностью 100 Вт, модель предназначена для использования в жилых домах и сельскохозяйственных угодьях.
Vortex Atlantis / Grand, находящийся на стадии прототипа, имеет высоту от 9 до 13 м и выходную мощность около 1 кВт. Модель предназначена для жилого / сельского самостоятельного производства и установки на заводах.
Разработка продукта на основе видео
Vortex Bladeless Ltd. была основана в 2012 году Давидом Яньесом и Раулем Мартином. Видео вдохновило их на разработку генератора.
Это было видео обрушившегося в 1940 году моста Tacoma Narrows Bridge в США, показывающее, как частота моста резонирует с частотой вихрей, вызванных высокоскоростным ветром, что привело к его обрушению.Дэвиду пришла в голову идея создать устройство, которое генерирует энергию, используя энергию, содержащуюся в вихрях.
Его идея получила высокую оценку и получила государственное финансирование Центра развития промышленных технологий (CDTI). Компания начала сотрудничество с Массачусетским технологическим институтом и Гарвардским университетом. В июне 2015 года они начали успешную краудфандинговую кампанию по найму инженеров, необходимых для реализации проекта.
Новая чистая энергия для регионов, где производство солнечной энергии невозможно.
В последние годы растет спрос на чистую энергию, такую как солнечная и ветровая, в качестве меры против глобального потепления.Чтобы удовлетворить эти требования, компания разрабатывает устройства, которые можно устанавливать где угодно, с низкими производственными затратами и простотой эксплуатации.
Совершенно новое экологически чистое энергетическое устройство по доступной для частных лиц цене, вырабатывающее электроэнергию независимо от количества часов ветра и солнечного сияния, требует меньше места и легко устанавливается. Может наступить день, когда усилия компании трансформируют рынок ветроэнергетики.
Источник: Vortex Bladeless Ltd.
Новый вертолетBell может выглядеть странно, но он может уменьшить количество аварий и шум
Посмотрите, как летит вертолет, и в центре внимания находится большой винт с волчком.В конце концов, это основной механизм, который позволяет вертолету преодолевать гравитацию и парить в воздухе по команде пилота.
Но почти на всех вертолетах есть ключевая фигура второго плана: меньший хвостовой винт. Он играет решающую роль в качестве устройства защиты от крутящего момента — он предотвращает вращение вертолета по кругу в ответ на движение несущего винта, а также позволяет пилоту регулировать направление, в котором указывает нос при зависании вертолета.
Но производитель вертолетов Bell запустил новый экспериментальный корабль с совершенно другим рулевым винтом, системой, которая в некоторых случаях может быть более безопасной, а также более тихой, чем традиционный рулевой винт.Он состоит из четырех вращающихся вентиляторов, заключенных в воздуховоды, и более того, они имеют электропитание. Это радикально отличается от того, как работает обычный хвостовой винт. Фактически, Белл утверждает, что это первый вертолет с таким хвостовым оперением, который когда-либо летал. Это своего рода гибрид обычного вертолета и того, как может выглядеть будущее одного авиационного сектора.
В типичном рулевом винте эти вращающиеся хвостовые лопасти механически связаны с двигателем самолета. Физические компоненты, такие как приводные валы, коробки передач и муфты, делают работу по его вращению.Этот ротор всегда вращается с одинаковым числом оборотов в минуту. Когда пилот хочет так или иначе ориентировать нос, нажимая на педали, лопасти рулевого винта меняют свой угол, но никогда не меняют свою скорость. И когда главный верхний винт вращается, этот хвостовой винт тоже всегда крутится.
В новом самолете Bell четыре вентилятора в задней части не связаны механически с двигателями вертолета и несущим винтом. Генераторы, подключенные к коробке передач верхнего винта, вырабатывают электрическую энергию, которая проходит через провода в хвостовой балке вертолета и приводит в действие двигатели, вращающие вентиляторы.
Эта новая установка позволяет Беллу делать некоторые интересные вещи с этим хвостом. Самым драматичным является то, что в некоторых случаях они могут просто выключить эти вентиляторы, даже когда главный ротор вращается — что невозможно сделать с обычным судном. Это означает, что когда вертолет находится на земле с вращающимся несущим винтом, нет опасного рулевого винта, вращающегося рядом с людьми. Четыре вентилятора могут быть неподвижны, так как трение между землей и измельчителем означает, что ему не нужна система противодействия крутящему моменту, чтобы предотвратить его вращение.
«Нет никакого риска получить травму от вращающегося лезвия», — говорит Эрик Синусас, программный директор новой технологии, которую Bell называет электрически распределенным анти-крутящим моментом или EDAT. Они называют новый вертолет демонстратором EDAT.
Обычные вращающиеся хвостовые винты представляют собой реальную опасность: если человек соприкасается с хвостовым винтом, это ужасно плохо. Например, в 1994 году на Аляске менеджер по лесозаготовительной технике погиб после того, как «попал прямо в хвостовой винт», отмечается в отчете CDC.В 2018 году аналогичным образом погиб на вертолете морской пехоты лейтенант ВМФ. Один анализ ранений и смертей от ударов лопастей вертолета в армии, опубликованный в 1993 году, показал, что 50 процентов инцидентов произошли в результате действия верхнего винта, что означает, что вторая половина произошла от хвостового оперения.
Электрохвостовые вентиляторы на этой машине EDAT заключены в воздуховоды, и на языке вертолета эти элементы называются фенестронами. Европейская аэрокосмическая компания Airbus имеет долгую историю использования этих вертолетов в хвосте, начиная с 1968 года.Фактически, слово fenestron происходит от провансальского французского слова, означающего «маленькое окно», как объясняется в этом видео. Небольшое окошко, которое закрывает хвостовой винт, добавляет элемент безопасности, надеясь, что кому-то будет сложнее просто войти в один из них, а вращающемуся ротору будет сложнее врезаться в землю в случае аварии.
Есть и другие хитрости в хвосте этого творения Bell, с его четырьмя электрическими вентиляторами в четырех крошечных окошках. Обычный ротор меняет величину тяги, которую он производит, независимо от того, заключен ли он в фенестрон или нет, путем изменения угла этих вращающихся лопастей.Но лопасти EDAT не двигаются таким образом, что упрощает их механическую обработку. «Тяга контролируется простым ускорением или замедлением — или даже изменением направления — двигателей», — говорит Синусас. Обычный рулевой винт чоппера этого сделать не может.
Тот факт, что этот чоппер может изменять скорость своих хвостовых вентиляторов или даже иногда отключать их, влияет на его громкость. Чем медленнее вы их запускаете, тем они тише. «Скорость, с которой лезвия и лезвия движутся по воздуху, является основной причиной шума», — объясняет Синусас.И, как ни странно, хвостовой винт может быть даже громче, чем несущий винт на меньших вертолетах, по словам Синусаса.
Демонстратор EDAT. BellНа EDAT иногда эти хвостовые вентиляторы должны вращаться быстро, создавая тонны тяги, но им не всегда нужно гудеть на своих максимальных оборотах. В таких случаях машина будет тише. Удивительно, но вентиляторы могут быть полностью неподвижными, когда вертолет летит вперед с определенной скоростью: аэродинамические силы, создаваемые вертикальным хвостовым оперением вертолета, обеспечивают необходимый ему анти-крутящий момент, не позволяя вертолету вращаться.«Он значительно тише обычного хвостового винта», — говорит Синусас.
Более тихий вертолет с меньшей вероятностью врезания хвостом в людей имеет очевидные преимущества, но такие системы также могут представлять собой путевые точки в будущее, когда люди летают по городам на воздушных такси, частично или полностью электрических. И в этом будущем аппарат в идеале будет тихим и безопасным (и, возможно, даже иметь некоторый уровень автономности). Bell работает над отдельной концепцией электрического такси под названием Nexus 4EX, но другие компании тоже, среди них Boeing и Lilium.
«О полностью электрических самолетах много говорят, — говорит Синусас. «Ясно, что EDAT, естественно, станет ступенькой».
Эта ступенька впервые оторвалась от земли в мае прошлого года и с тех пор летает, по его словам, «очень успешно».
(PDF) Тепловая конструкция интегрированного индуктора для аэрокосмического стартера-генератора мощностью 45 кВт
Рис.12 Распределение температуры в S / G с полузатопленным статором
Рис.13: Распределение температуры в индукторе с полузатопленным статором
Таблица VI суммирует температуру, прогнозируемую с использованием обсуждаемого подхода с двумя вариантами охлаждения
.Как можно заметить,
может значительно снизить температуру при использовании
опции прямого охлаждения; это может иметь значительное влияние на
, достижимую удельную мощность, на эффективность и на срок службы компонентов
. И наконец, что не менее важно, может быть достигнуто дальнейшее снижение веса и объема на
, что на
необходимо для аэрокосмических приложений.
T
ABLE
VI:
M
AXIMUM
T
ИМПЕРАТУРА
P
REDICTED
Макс.темп. / G) 145 80
Железо (индуктор) 147 92
Медь (S / G) 148 82
Медь (индуктор) 212135
VI.C
ВКЛЮЧЕНИЕ
В этой статье представлена сильноточная конструкция индуктора пассивного фильтра
, встроенного в общий корпус стартера-генератора
. Последовательный индуктор
требовался для сглаживания составляющей пульсаций переключения из формы волны тока
стартера-генератора. Размер индуктора был определен с использованием подхода к продукту
с последующим анализом методом конечных элементов
, который подтвердил электромагнитные характеристики интегрированного индуктора
.Общие потери мощности при 8, 20 и 32
об / мин были оценены для реализации теплового проекта комбинированной системы стартер-генератор
и интегрированной индукторной системы
при достижении полной интеграции с точки зрения управления тепловым
. Конфигурация общего охлаждения
может гарантировать безопасные условия работы даже в самых требовательных рабочих точках
. Предлагаемая конструкция
может значительно снизить общий объем и
веса системы из-за меньшего количества требуемых гидравлических соединений
.Низкие рабочие температуры также могут помочь повысить общую эффективность системы
R
ЭФЕРЕНЦИИ
[1] Роберт Абебе, Гауранг Вакил, Джованни Ло Кальцо, Томас Кокс, Саймон
Ламберт, Марк Джонсон, Крис Герада , Барри Мекроу «Интегрированные приводы mot или
: современное состояние и будущие тенденции» IET Electric Power
Applications, 15 стр., Print ISSN 1751-8660, Online ISSN 1751-8679
[2] M. Raza Khowja, С.Герада, Г. Вакил, П. Уиллер и К. Патель,
«Интегрированный индуктор выходного фильтра для двигателя с постоянными магнитами
приводов», IECON 2016 — 42-я ежегодная конференция IEEE Industrial
Общество электроники, Флоренция, 2016
[3] Мухаммад Раза Хоуджа и др., «Новый синхронный двигатель с постоянным магнитом
со встроенным фильтром-индуктором, использующий собственный магнит
двигателя», IEEE Transactions on Industrial Electronics, 2020, In Press,
DOI (идентификатор) 10.1109 / TIE.2020.3000110
[4] M. R. Khowja и др., «Новый мотор-образный индуктор вращения для
приводов двигателей», IEEE Transactions on Industrial Electronics,
vol. 67, нет. 3, стр. 1844-1854, 2020.
[5] М. Раза Ховжа, К. Герада, Г. Вакил, П. Уиллер и К. Патель, «Роман
интегративных вариантов для пассивного фильтра-индуктора в высокоскоростном переменном токе.
приводов », IECON 2016 — 42-я ежегодная конференция IEEE Industrial
Electronics Society, Флоренция, 2016
[6] M.Раза Ховжа, К. Герада, Г. Вакил, К. Патель и П. Уиллер, «Оптимизация дизайна
интегрированных индукторов вращения для высокоскоростных приводов переменного тока
», Международная конференция по электрическим машинам и приводам IEEE
, 2017 г. ( IEMDC), Майами, Флорида, США, 2017
[7] М. Раза Ховжа, К. Герада, Г. Вакил, К. Патель и П. Уиллер, «Оптимизация проекта
интегрированных безроторных индукторов для высокоскоростных Привод переменного тока
приложений, 2017 IEEE Workshop on Electrical Machines Design,
Control and Diagnosis (WEMDCD), Nottingham, United Kingdom,
2017
[8] M.Раза Ховжа, К. Гера да, Г. Вакил, С. Куадир Куадри, П. Уиллер и
К. Патель, «Проектирование интегрированного индуктора для аэрокосмического стартера мощностью 45 кВт — генератора
», Конференция по электрификации транспорта IEEE 2018 и
Expo (ITEC), Лонг-Бич, Калифорния, 2018, стр. 570-575.
[9] Полковник У. Т. Маклиман «Руководство по проектированию трансформаторов и индукторов
», четвертое издание
[10] Казимерчук М.К., Секия Х. «Проектирование резонансных индукторов переменного тока с использованием метода
площадей» Конгресс и выставка по преобразованию энергии,
2009.ECCE Беджан, А., Теплопередача: Wiley 1993 1Th
[11] Стейтон, Д.А. и А. Каваньино, Конвекционная теплопередача и поток
Расчеты, подходящие для тепловых моделей электрических машин. Industrial
Electronics, IEEE Transactions on, 2008. 55 (10): p. 3509-3516. 2Th
[12] Симпсон, Н., Р. Вробель и П.Х. Меллор, Оценка эквивалентных
тепловых параметров пропитанных электрических обмоток. Индустрия
Приложения, транзакции IEEE, 2013 г.49 (6): с. 2505-2515. 3Th
[13] A. La Rocca. Термический анализ высокоскоростной электрической машины, докторская диссертация
, Университет Ноттингема, 2016 г. 4Th
[14] Гаурав А., М.К., Самир К., Термогидродинамика развития потока
в прямоугольной решетке мини-каналов , in Proceedings of Twentieth
Национальная и Девятая Международная конференция ISHMT-ASME по тепло- и массообмену
Conference2010:
708
Разрешенное лицензионное использование, ограниченное: UNIVERSITY OF NOTTINGHAM.Загружено 12 октября 2020 года в 12:52:21 UTC с IEEE Xplore. Ограничения применяются.
Urban Aero начинает полномасштабную разработку CityHawk
Пресс-релиз по городской аэронавтике | 23 июля 2018 г.
Приблизительное время чтения 3 минуты 5 секунд.
В связи с открытием нового веб-сайта (www.metro-Skyways.com) компания Urban Aeronautics объявила о начале полномасштабной разработки летающего автомобиля eVTOL с гибридной силовой установкой CityHawk. Автомобиль будет разрабатываться дочерней компанией Урбана, Metro Skyways Ltd, первые пилотируемые полеты будут выполнены в 2021–22 годах, после чего будет проведена полная сертификация FAA.
Основное преимущество CityHawk перед вертолетами и предлагаемым в настоящее время самолетом eVTOL — это его габариты размером с автомобиль, обусловленные бескрылой конструкцией без ротора в сочетании со значительной полезной нагрузкой, составляющей до шести человек. Urban Aero PhotoCityHawk предлагает настоящий эквивалент наземного такси или семейного седана как по внешнему виду, так и по вместимости. Его уникально компактный, «бескрылый» фюзеляж и режимы полета «шесть степеней свободы без сцепления» обеспечивают истинный, беспрепятственный, трехмерный доступ и мобильность.Это делает его первым в своем классе, способным летать куда угодно и приземляться где угодно.
При первоначальной разработке и испытаниях будут использоваться два турбовальных двигателя мощностью 1000 лошадиных сил, соединенные с генераторами электроэнергии для управления гребными винтами подруливающего устройства. После выдачи сертификата типа FAA на базовое воздушное транспортное средство (совместно с канадским партнером Urban Aero, Cert Center Canada (3C)) компания переведет конструкцию основного источника питания для CityHawk на 100% чистый водородный двигатель. двигательная установка.
Предварительная «заморозка конфигурации» для CityHawk является результатом успешного завершения серии демонстраций клиентам беспилотного варианта компании, Cormorant, на Tactical Robotics Ltd., второй дочерней компании Urban,
.Однотонный Cormorant на данный момент совершил 250 полетов, проверяя технологию, которая используется как в Cormorant, так и в CityHawk. Конструкция CityHawk идентична конфигурации Cormorant, однако он будет оснащен двумя двигателями, чтобы соответствовать существующим коммерческим требованиям сертификации FAA, которые предусматривают продолжение полета в случае отказа двигателя.Эта функция безопасности дополняет способность CityHawk развернуть баллистический парашют в случае любого катастрофического отказа.
CityHawk разработан в соответствии с самыми строгими текущими требованиями FAA для двухмоторных вертолетов (FAR 27). Его главное преимущество перед вертолетами и предлагаемыми в настоящее время самолетами eVTOL — это габариты автомобиля, которые являются результатом бескрылой конструкции без ротора в сочетании со значительной полезной нагрузкой — до шести человек.
Все роторы транспортного средства расположены внутри фюзеляжа, что обеспечивает непревзойденную безопасность для наземного персонала и беспрецедентное снижение шума, в результате чего акустический след эквивалентен проезжающему мимо автомобилю.
CityHawkMetro Skyways — это первый из двух пилотируемых кораблей FancraftTM с гибридным двигателем, запланированных к разработке.
Энергии | Бесплатный полнотекстовый | Анализ характеристик спиральной ветряной турбины Архимеда с помощью моделирования и полевых испытаний
1. Введение
По мере роста глобального спроса на энергию ветра совокупная установленная мощность ветряных турбин по состоянию на 2018 год достигла 595 ГВт в мире [1,2]. Хотя определения малых ветряных турбин различаются в разных странах, ветровые турбины с рабочей площадью ротора менее 200 м 2 и номинальным выходным напряжением менее 1 кВ переменного тока или 1.5 кВ постоянного тока в Корее определяются как небольшие ветряные турбины [3]. Небольшие ветряные турбины с большей вероятностью будут установлены ближе к городским районам, чем большие ветровые турбины, что улучшит возможность использования автономного городского оборудования [4]. Для больших ветровых турбин конфигурация подъемного типа с горизонтальной осью и тремя лопастями считается стандартного типа и обладает высочайшей аэродинамической эффективностью. В случае небольших ветряных турбин их можно различать по конфигурации подъемной силы или сопротивления в зависимости от эффективной аэродинамической силы, которая вращает ротор ветряной турбины.Эти типы ветряных турбин можно разделить на категории с горизонтальной и вертикальной осью. Для турбин подъемного типа с горизонтальной осью они работают по тому же принципу и форме, что и большая ветряная турбина, но для турбин подъемного типа с вертикальной осью ротор вращается вокруг оси, параллельной башне, за счет подъемной силы, создаваемой лопастями. поверхность. Известно, что ветряные турбины с вертикальной осью подъема немного менее эффективны, чем их аналоги с горизонтальной осью. В отличие от ветряных турбин подъемного типа, существуют ветряные турбины тормозного типа для небольших ветряных турбин.Большинство ветряных турбин тормозного типа представляют собой ветряные турбины с вертикальной осью, такие как ветровые турбины Savonious и витые Savonious, и они используют вызванное ветром сопротивление поверхности лопастей для вращения ротора. Однако существует турбина тормозного типа с горизонтальной осью, известная как спиральный ветряк Архимеда. Для этих турбин крутящий момент, создаваемый сопротивлением лопасти, позволяет ротору вращаться вокруг оси, параллельной земле. Спиральная ветряная турбина Архимеда, турбина тормозного типа с горизонтальной осью, имеет несколько более высокий аэродинамический КПД, чем у ветряных турбин с вертикальной осью.Хотя они менее эффективны, чем ветряные турбины с горизонтальной осью подъема, в соответствии с турбиной с тормозным приводом, они могут начать вырабатывать электроэнергию при минимальной скорости ветра. Форма ротора может способствовать выравниванию ротора по направлению ветра. Таким образом, им не нужно устанавливать никаких дополнительных устройств рыскания. Кроме того, они производят меньше аэродинамического шума. Поэтому в последнее время растет спрос на этот тип ветряных турбин для систем уличного освещения [5]. Для ветряных турбин общего типа с горизонтальной осью подъема используются программы коммерческого анализа, основанные на теории импульса лопастных элементов [6], для прогнозирования их представление.Например, Det Norske Veritas и Germanischer Lloyd, DNV-GL’s Bladed [7] — это проверенная программа аэроупругого анализа ветряных турбин, которая широко используется в ветроэнергетике. Bladed может использоваться для прогнозирования энергетических характеристик ветряных турбин, для выполнения расчетов нагрузки и оптимизации системы управления. Бесплатное программное обеспечение FAST [8], предоставляемое Национальной лабораторией возобновляемых источников энергии, NREL, представляет собой программу аэроупругого анализа, аналогичную программе для анализа упругости и упругости. Лопатка, которая прогнозирует производительность турбины и выполняет расчет нагрузки.QBlade [9] также является бесплатным программным обеспечением от TU-Berlin для использования в анализе как вертикальных, так и горизонтальных ветряных турбин подъемного типа с помощью встроенной программы двумерного анализа профиля XFoil [10]. HAWC2 [11], коммерческий код Технического университета Дании (DTU), может использоваться для выполнения аэроупругого анализа горизонтальных и вертикальных ветряных турбин подъемного типа. Однако эти инструменты моделирования, которые поддерживают только ветер подъемного типа. турбины, не могут быть использованы для анализа целевой ветряной турбины в этом исследовании.Поэтому был использован численный подход через программу вычислительной динамики потока. Для анализа использовался инструмент моделирования Ansys Fluent [12], и был проведен анализ на основе уравнений RANS. Ряд исследований показал, что прогнозирование характеристик ветряных турбин тормозного типа, в основном ветряных турбин с вертикальной осью, возможно с помощью моделирования CFD [13,14,15,16,17,18]. Однако для очень ограниченного числа случаев была проведена экспериментальная проверка. Фудзисава [13] использовал коммерческие коды CFD для прогнозирования энергетических характеристик ветряной турбины с вертикальной осью типа Савониуса.Фернандо [14] представил подход на основе потока, основанный на импульсе частиц жидкости, для прогнозирования характеристик ветряной турбины Савониуса. Кроме того, Шинохара и Ишимацу [15] предсказали выходные характеристики ветряной турбины типа Савониуса с помощью моделирования CFD и проверили результаты экспериментальным методом с использованием небольшой лабораторной аэродинамической трубы. В этих исследованиях методы прогнозирования характеристик ветряных турбин тормозного типа с использованием программ CFD подходили для моделирования; однако были ограничения при проверке результатов моделирования экспериментальными испытаниями с использованием масштабированной модели.Их эксперименты, выполненные в лабораторном масштабе, не могли отразить поведение реальной ветряной турбины из-за электрических компонентов, таких как генератор-инвертор, без учета электрических потерь и алгоритма управления турбиной. Для ветряных турбин Archimedes были проведены следующие исследования. Лу [16] предложил теоретическую модель прогнозирования мощности спиральных ветряных турбин на основе уравнения углового момента. Кроме того, было выполнено моделирование CFD для прогнозирования характеристик ветряной турбины.В результате сравнение предложенной теоретической модели было проведено по сравнению с моделированием CFD. Оба метода оценили коэффициент мощности спиральной ветряной турбины Архимеда, который показал механический КПД как 0,25. Однако экспериментальной проверки не проводилось. Сафидари [17] построил масштабную модель спиральной ветряной турбины Архимеда и предсказал аэродинамическую эффективность с помощью анализа CFD. В его исследовании был предсказан максимальный коэффициент мощности 0,25. Ким [18] определил мощность спиральной ветряной турбины Архимеда посредством моделирования CFD.Оба исследователя провели экспериментальную проверку, однако они провели эксперименты по определению характеристик потока вокруг ротора с использованием измерения PIV, но не проводили экспериментов с характеристиками турбины. В исследованиях Лу [13], Сафидари [17] и Кима [18] характеристики мощности ветряной турбины и поля потока вокруг ротора оцениваются посредством моделирования. Проверка проводилась экспериментальными методами; однако были проведены только сравнительные проверки, относящиеся к полю потока, а не к энергетическим характеристикам.Таким образом, не проводилось никаких экспериментов для экспериментальной проверки прогнозируемой выходной мощности посредством моделирования. Таким образом, в этом исследовании повторно исследуется прогнозирование производительности спиральной ветряной турбины Архимеда с помощью моделирования CFD. Хотя целевая ветряная турбина аналогична предыдущим исследованиям [16,17,18], размеры лопастей другие. Кроме того, в отличие от предыдущих исследований, цель этого исследования состояла в том, чтобы спрогнозировать общую выходную электрическую мощность целевой ветряной турбины, а также экспериментально подтвердить результаты моделирования с помощью полевых испытаний.Для этого была смоделирована и смоделирована ветряная турбина с помощью Fluent, чтобы узнать аэродинамическую эффективность ветряной турбины. Кроме того, чтобы определить электрический КПД генератора и контроллера, было проведено испытание сопряженного генератора с контроллером с использованием испытательного стенда двигатель-генератор для различных скоростей вращения. Затем измеренный общий электрический КПД был использован для оценки кривой мощности целевой ветряной турбины, и результаты были подтверждены результатами полевых испытаний с использованием реальной ветряной турбины на испытательной площадке.2. Имитационная модель
На рисунке 1 показана форма ветряной турбины, использованной в этом исследовании. На рис. 1а показана полномасштабная ветряная турбина, установленная на полигоне. Для моделирования турбины была построена 3D-модель ветряной турбины с помощью автоматизированного проектирования (CAD), как показано на рисунке 1b. По трехмерной модели и геометрическим измерениям реальной ветряной турбины максимальный диаметр ветряной турбины составлял 1,5 м, а длина ротора по потоку составляла 1,2 м по оси вращения. В таблице 1 перечислены технические характеристики ветряной турбины.Номинальная мощность ветроустановки составляет 500 Вт при номинальной скорости ветра 12,0 м / с. Номинальная частота вращения ветряка — 330 об / мин. Сила, вызывающая в основном вращение лопасти, — это сопротивление, действующее на три лопасти. Далее, как упоминалось ранее, эта ветряная турбина была разработана для системы уличного освещения. По причинам, обсужденным ранее, это исследование было проведено на основе моделирования CFD. На рисунке 2 показана схема процедур моделирования для оценки характеристик турбины.Были выделены процедуры моделирования в моделировании, настройке решателя и анализе результатов. Подробная процедура каждого шага следующая:2.1. Моделирование и создание сетки
Для построения числовой модели была упрощена 3D-модель ветряной турбины. Из-за проблем с болтами и гайками и разрешающей способностью программы компоненты, которые не отображали информацию о толщине и размерах, были упрощены для анализа в Fluent.
На рис. 3 в упрощенном виде показан болт, используемый для фиксации лезвия.Как показано на рисунке, форма болта была упрощена до формы крышки, чтобы минимизировать эффекты перелома лопасти и завихрения. За счет изменения формы удалось избежать некачественной сетки возле болта для получения более надежных результатов. Кроме того, ненужные генераторы и другие дополнительные компоненты ветряной турбины были удалены, чтобы сократить время расчета при аэродинамическом анализе. Для анализа ротора область поля потока, окружающая ротор ветряной турбины, была установлена на 8 м шириной и 6 м высокий, как показано на рисунке 4a.Высота и ширина поперечного сечения поля потока были в 4 раза и в 5,3 раза больше диаметра ротора ветряной турбины соответственно. Кроме того, длина поля потока, расстояние от входа до выхода было установлено равным 10 м, чтобы моделирование плавно сходилось на выходном участке с граничным значением 0 Паскаль, атмосферным давлением.После изменения формы была создана сетка, необходимая для моделирования. Для типа сетки была выбрана четырехугольная форма. Сгенерированная сетка была изменена вручную с учетом соединительных компонентов, кривизны и сложности объекта, чтобы улучшить качество решения и сократить время решения.Качество созданной сетки проверялось независимым от сетки тестом, после чего в конечном итоге был выбран минимальный размер ячейки 0,5 мм, что составляет 50% минимальной толщины ротора. В результате сгенерированная численная модель, включающая сетку, содержала 8 131 206 тетраэлементов и 1 442 438 узлов.
2.2. Решатель и настройка решения для моделирования
Для расчета силы, создаваемой поверхностью ротора, и крутящего момента вокруг оси ротора из моделирования был выбран переходный анализ.Для модели турбулентности, которая будет использоваться в качестве замыкания усредненных по Рейнольдсу уравнений Навье – Стокса, была применена k-омега-модель переноса напряжения сдвига (SST), а также была выбрана «точность второго порядка», чтобы минимизировать возможные ошибки в результатах моделирования. [4]. Максимальная итерация была выполнена 100 раз для каждого случая, а временной шаг моделирования был установлен равным 0,01 с, что является обратной величиной максимальной скорости вращения ротора. Метод CFD рассчитывает распределение давления по поверхности лопасти с входными данными. скорости ветра на входе и скорости вращения ротора, которые можно использовать для расчета крутящего момента ротора и силы тяги в осевом направлении, в конце.Поэтому была определена скорость вращения ротора и применена скорость ветра поля потока на входе. Наконец, полученный крутящий момент и входная частота вращения могут использоваться для расчета выходной механической мощности с использованием уравнения (1).Протор [Вт] = Тротор [Н / м] · ротор [рад / с].
(1)
Кроме того, коэффициент мощности ротора, который представляет собой аэродинамический КПД, может быть рассчитан как отношение механической мощности, выводимой от ротора, к входной аэродинамической мощности, как показано в уравнении (2).CP [-] = Protor [Вт] 0,5ρAV∞3 [Вт].
(2)
Коэффициент мощности является функцией отношения скоростей наконечника, которое является отношением скорости вращения к скорости ветра, как показано в уравнении (3) [6]. Чтобы получить коэффициенты мощности для различных соотношений конечных скоростей, моделирование было повторено с фиксированным значением скорости ветра и скоростью вращения ротора, изменяющейся от 50 до 500 об / мин с интервалом 50 об / мин. Условия моделирования приведены в таблице 2. По результатам моделирования был получен график зависимости коэффициента мощности от передаточного числа наконечников.5. Экспериментальная проверка полевыми испытаниями
Для экспериментальной проверки прогноза производительности, основанного на анализе CFD и тесте генератор-контроллер, целевая ветряная турбина была установлена на испытательном полигоне на острове Чеджу в Корее. На рисунке 10 показана схема тестирования. Выходная электрическая мощность и соответствующая скорость ветра на измерительной мачте, расположенной на испытательном полигоне, были измерены с частотой дискретизации 100 Гц и усреднены за 60 с. Анемометр и флюгер, установленные на измерительной мачте, находились на высоте 6 м от земли.Измеренная скорость ветра использовалась для определения скорости ветра на высоте ступицы ветряной турбины, которая находится на расстоянии 10 м от земли, с использованием степенного закона, показанного в уравнении (5). В уравнении (5) V — скорость ветра на высоте ступицы, Vr — скорость ветра, измеренная с помощью анемометра, установленного на измерительной мачте, z — высота ступицы, 10 м, и zr — высота измерения с использованием анемометра, 6 мес. Кроме того, α является показателем сдвига ветра, и значение 1/7, которое подходит для равнинной местности, как показано на рисунке 10, было использовано на основе литературы [23].На рисунке 11 показаны результаты теста. Каждая звездочка означает усредненные данные за одну минуту. Из-за турбулентности ветра в тестовых данных присутствуют рассеяния. Кружки представляют собой среднюю электрическую мощность в каждом интервале скорости ветра с интервалом 0,5 м / с, начиная с 3 м / с. Кроме того, короткие вертикальные линии, проходящие через кружки, представляют собой стандартное отклонение, добавленное и вычтенное из среднего. К сожалению, расчетная скорость ветра 12,73 м / с и номинальная мощность 500 Вт не были измерены из-за низкой частоты скорости ветра более 10 м / с во время измерительной кампании.Сравнение измеренного выхода с результатами моделирования с реализованными измеренными электрическими потерями позволило проверить результаты моделирования и процедуры прогнозирования производительности. Сравнение моделирования и результатов измерений показано на рисунке 12. Как показано на рисунке, максимальная ошибка между моделированием и усредненным по интервалу данными измерений составила 7,80% при 8,5 м / с.6. Выводы
В этом исследовании рабочие характеристики спиральной ветряной турбины Архимеда с горизонтальной осью были предсказаны с помощью моделирования CFD и экспериментально подтверждены полевыми испытаниями.В результате предсказания максимальная механическая эффективность 0,293 наблюдалась, когда передаточное число концевых скоростей ротора составляло 2,19. Кроме того, был проведен тест для определения электрического КПД генератора и контроллера, и было измерено изменение КПД в зависимости от скорости вращения ротора. Применяя измеренный электрический КПД к результатам моделирования с помощью CFD, можно было спрогнозировать выходную электрическую мощность ветряной турбины в зависимости от скорости ветра, и номинальная скорость ветра для получения номинальной мощности 500 Вт оказалась равной 12.73 м / с.
Чтобы проверить пригодность результатов по мощности и процессов прогнозирования производительности, ветряная турбина была установлена на испытательном полигоне в Корее, и была измерена ее выходная мощность. После сравнения измеренной мощности с моделированием максимальная ошибка между измеренной мощностью и моделированием оказалась равной 7,80% при скорости ветра 8,5 м / с. Таким образом, было обнаружено, что прогноз производительности с помощью CFD хорошо согласуется с полевыми данными на испытательной площадке.
Для более точного прогнозирования характеристик ветряных турбин следует учитывать аэродинамические характеристики ротора и электрический КПД, например, генератор-инвертор.В случае моделирования CFD для получения аэродинамических характеристик ротора важна оценка качества созданной сетки с помощью независимого от сетки теста. Кроме того, при применении результатов испытаний генератор-инвертор к результатам CFD необходимо применять электрический КПД, соответствующий прогнозируемой скорости вращения относительно скорости ветра. Если рассматривать оба случая, прогноз производительности ветряной турбины с лобовым сопротивлением будет аналогичен тесту в реальном масштабе и будет более экономичным способом проверки производительности системы до изготовления прототипа.
Заключительный отчет для FNE10-676 — Система управления грантами SARE
Первоначально в нашем проекте предлагалось разработать, построить и оценить единственный прототип «Mark I». Этапы проектирования и строительства были завершены в 2010 году, а оценка была завершена к концу лета 2011 года. Но вместо того, чтобы завершить проект на этом этапе и начать информационную работу, мы решили повторить последовательность проектирования, строительства и оценки со вторым «Марком II». »Прототип, созданный на основе нашего опыта и устраняющий некоторые недостатки конструкции Mark I.Мы считаем, что в целом эти усилия привели к созданию превосходного исследовательского продукта, который принесет большую пользу фермерам. В этом разделе подробно описаны последовательные этапы проектирования, построения и оценки двух отдельных проектов.
Процесс проектирования Mark I
Наш первый дизайн является результатом 20-летней истории работы соавтора проекта Виктора Гарди с концепцией Savonius VAWT. Это модульное устройство на основе двух роторов и приводного диска. При диаметре почти 6 футов ротор настолько велик, насколько это позволяет природа строительного материала (фанера толщиной 1/2 дюйма в листах 4 x 8 футов).Другие аспекты дизайна и конструкции вытекают из размеров ротора. Мы решили использовать стандартную внешнюю фанеру и обычные пиломатериалы из ели для нашего прототипа, понимая, что будущее постоянное устройство может быть построено из более прочных материалов. Я могу себе представить, что ротор, построенный из компонентов, обработанных под давлением, может прослужить 10 лет, время от времени покрываясь краской или пятнами. Какая-то крыша над ротором не повлияет на производительность и продлит срок его службы.
РоторыSavonius также сделаны из стали, и я видел фотографии и видеозаписи таких ветряных устройств, установленных на плоских городских крышах в Австралии и Скандинавии. Мы настоятельно рассматривали возможность тестирования устройства на платформе на крыше одного из силосов нашей сталелитейной фермы. Хотя мы полагаем, что силосы могли бы справиться с нагрузкой без проблем, мы не смогли придумать способ выполнить необходимые предустановочные работы на такой высоте (65 футов). Это очень плохо, так как на этой высоте дует сильный ветер.Построенная нами ветряная мельница Савониус состоит из башни корпуса, двух роторов, приводного диска и вертикального вала. Башня корпуса поддерживает вал в подшипниках в основании и вверху, а также служит каркасом для панелей статора. Виктор Гарди нашел использование панелей статора, которые защищают заднюю сторону чашек ротора от турбулентности, когда они поворачиваются против ветра, для повышения эффективности. Роторы устанавливаются на трубный вал диаметром 1 дюйм (внутренний диаметр). Вал трубы стабилизирован внутри герметичного подшипника вверху и прикреплен болтами к фанерному приводному диску на основании.Подшипник автомобильного колеса под приводным диском соединяет его с рамой. В начале 2010 года Виктор Гарди построил рабочую модель ротора в масштабе 1/6. Это помогло нам визуализировать дизайн и уточнить методы строительства, когда мы начали строить прототип на ферме.
Ключевой особенностью этой или любой другой ветряной мельницы является «протоптанная площадь». Это цифра, на которой основана вся математика ветрогенерации. Наша мельница имеет два ротора, верхний установлен под углом 90 градусов к нижнему.В любой момент времени один ротор ловит ветер в точке максимального механического преимущества, а другой собирающий ротор находится в точке уменьшенного механического преимущества. В целом, по нашим оценкам, площадь стреловидности в 1,33 раза больше, чем у отдельного паруса несущего винта. Каждый парус четыре фута в высоту и 32 дюйма в ширину. Это дает в общей сложности 14,9 квадратных футов или 2,64 квадратных метра площади парусов. Казалось, что это хороший размер для простой переносной экспериментальной установки.
Процесс строительства Mark I
По проекту Виктора Гарди мы начали строительство летом 2010 года.Конструкция башни — это все основные пиломатериалы, в основном 2 х 4 дюйма. Мы решили использовать болты 1/4 дюйма для обеспечения прочности стыков. Эскизный проект предусматривал большое количество диагональных распорок. Мы удалили большую часть этой распорки из рекомендуемой нами конструкции в пользу структурной панели статора, которая будет выполнять функцию распорки. При строительстве башни возникло несколько трудностей, кроме трудности с перемещением ее после сборки. Каждая сторона имеет размер 6 ′ x 12 ′, а вся башня в сборе имеет размер 6 ′ x 6 ′ x 12 ′ и довольно тяжелая.Мы все еще могли перемещать его с помощью трактора.
Сборка башни занимает не более нескольких дней. Мы рекомендуем оставить центр в вертикальном положении и панели статора с одной стороны для последующей установки роторов. Роторы собраны из кусков, вырезанных из фанеры 1/2 ”. Очень мало отходов. На собранные стыки мы использовали эластомерную мембрану (типа Grace марки «Ice and Water Shield») и армировали их блокировкой. Мы использовали устойчивые к атмосферным воздействиям шурупы для настила и укрепили стыки между панелями паруса с помощью легкого листового металла, согнутого вручную под углом и прикрепленного к фанере с помощью шурупов для листового металла.В центре верхней и нижней панелей просверливается отверстие для вала трубы, и фланцы трубопровода диаметром 1 1/2 дюйма размещаются по обе стороны от каждого отверстия, прикрепленные друг к другу с помощью болтов и гаек.
Собранный ротор достаточно легко поднимается двумя людьми. Наконец, мы сконструировали приводной диск и установили его в башню с валом трубы и соответствующими подшипниками. Приводной диск имеет диаметр 70 дюймов и собран из двух листов фанеры BC толщиной 3/4 дюйма, склеенных и скрученных в два слоя и вырезанных по точному кругу с помощью циркулярной пилы и зажимного приспособления.Потребовались некоторые инновации, чтобы разобраться с основными инструментами деревообработки, но мы смогли получить хороший результат. Первоначально мы поместили резиновую шину 1/4 дюйма на внешнюю сторону круга с помощью контактного цемента, но позже мы удалили его, так как это казалось ненужным. Гладкий край приводного диска шириной 1 1/2 дюйма сам по себе является подходящей поверхностью для передачи трения на генератор. Мы установили ступичный подшипник Chevy Lumina точно по центру ведущего диска с помощью болтов. Мы выбрали эту модель подшипника, потому что она дешевая и имеет простую разболтовку.Частей, оставшихся от сборки приводного диска, было достаточно, чтобы построить прочную опорную коробку из пяти частей, собранных с помощью винтов. На эту опорную коробку мы установили неподвижную пластину ступичного подшипника. Гигантское колесо идеально сбалансировано и вращается с очень небольшим усилием на подшипнике. Мы поместили диск на опорную коробку в башню. Затем мы поместили роторы в башню и вставили вал через два ротора сверху, и ввинчили его во фланец трубы на приводном диске.
Устройство вращается по часовой стрелке, поэтому оно не откручивает резьбу в этом шарнире. Готовый агрегат можно сбалансировать, отрегулировав размещение опорной коробки внизу и верхнего подшипника вверху. Готовые зазоры довольно узкие, в пределах нескольких дюймов. После сборки мы обнаружили, что массив довольно прочный, и его можно было поднять с любого угла без искажений. Роторы вращались на легком ветру. Изначально одна из двух построенных нами башен издавала небольшой шум подшипников, легкий стон, который случался один раз за оборот только на низких скоростях.Но это исчезло через месяц эксплуатации и в остальном агрегат очень тихий. Мы перешли к этапу оценки в начале 2011 года. В целом строительство не вызвало проблем. Скромные навыки владения дисковой пилой и дрелью — это все, что требуется для создания аналогичного ротора. У нас было чуть менее 80 человеко-часов на строительство.
Процесс оценки Mark I
Мы начали оценивать производительность ротора в феврале 2011 года и завершили его в сентябре 2011 года. Первоначально мы построили параллельную установку двух опор ротора, каждая со своим собственным приводным диском.Мы полагали, что при размещении приводных дисков таким образом, чтобы оба они одновременно опирались на ведущее колесо генератора, эта комбинированная чистая генерация превысит генерацию двух независимых генераторов, как показано ниже: Однако мы отказались от этого подхода в пользу независимой генерации. Мы также решили, что установка бок о бок также поставила под угрозу нашу способность оценивать базовый набор ротора, поскольку каждая башня могла принимать ветер только с трех сторон, поэтому мы разделили их и продолжили испытания только одной единственной башни.Генератор может быть автомобильным генератором переменного тока (чем выше номинальная сила тока, тем лучше) или двигателем беговой дорожки для упражнений. Двигатели беговой дорожки для упражнений являются хорошими генераторами, поскольку они предназначены для работы в диапазоне скоростей. На валу двигателя установлено колесо для роликовых коньков, и двигатель закреплен в башне, так что колесо движется по инерции против движущегося приводного диска с давлением, достаточным для поворота, но не настолько, чтобы создавать ненужное трение. Иногда мы обнаруживали, что использование нейлоновой пряжи является полезной «пружиной», помогающей достичь нужной величины контактного давления.У нас были постоянные проблемы с попаданием влаги в наш генератор и снижением потенциала генерации. Важно размещать двигатели таким образом, чтобы они не пропускали воду, но обеспечивали умеренную вентиляцию. Одна из наших ошибок заключалась в установке двигателя под приводным диском валом вверх. При такой установке любая вода, скапливающаяся на поверхности приводного диска, будет стекать с края в двигатель. Если вместо этого двигатель установлен над приводным диском, его можно защитить с помощью простого ведра, расположенного над ним, и вода на приводном диске не повлияет на производительность.Только однажды зимой выпало значительное количество снега без достаточного ветра для ротора, чтобы оставаться в чистоте. В другие снегопады ветра было достаточно, чтобы ротор очистил все свои рабочие части, когда выпал снег. Наше первое место установки было рядом с нашим домом.
Ротор оставался в этом месте до конца мая 2011 года. Затем мы переместили ротор на пастбище, где, по нашим наблюдениям, ветер был сильнее и устойчивее, чем на ферме. Ротор было довольно легко перемещать; мы подняли его на фургон с трактором и домкратом и откатили на новое место.Он оставался на ходу до конца наших испытаний в июле 2011 года. У нас получилось хорошее сочетание сильных ветров зимой / весной и более умеренных ветров летом. Мы установили регистратор данных, чтобы регистрировать скорость, направление ветра, а также напряжение и ток генератора. Выходная мощность генератора варьировалась от примерно 10 Вт при минимальной конечной скорости около 5 узлов до 1800 Вт при устойчивых условиях сильного ветра в диапазоне 30 узлов. Мы не сохранили полученное электричество, а вместо этого подали его на нагрузку (лампочки на 12 вольт и в какой-то момент горелку электрической плиты).Нашим основным фокусом были измерения. В течение периода испытаний ротор не имел механических проблем. Мы никогда не стабилизировали его с помощью растяжек, вместо этого полагаясь на широкое 6-футовое основание для устойчивости. Он ни разу не упал и не получил повреждений от сильного ветра, несмотря на порывы ветра со скоростью до 45 миль в час во время периода испытаний, и несмотря на дополнительные 3 фута высоты, когда он находился на пастбище на станине фургона. Мы обнаружили, что ротор не будет вращаться намного быстрее, чем 60 оборотов вала ротора в минуту, а после примерно 32 миль в час дополнительный ветер, похоже, немного снижает обороты.Вот приблизительное значение частоты вращения вала при небольшой нагрузке при различных скоростях ветра: хотя ротор не может часто или очень сильно превышать 60 об / мин, в условиях сильного ветра он вращается на этой скорости с большей силой.
Если бы у нас была возможность задействовать несколько генераторов для этих условий, мы, вероятно, смогли бы значительно увеличить производимую мощность. Мы полагаем, что второй генератор будет меньше замедлять ротор при ветре 30 миль в час, чем при ветре 20 миль в час, даже несмотря на то, что наблюдаемые обороты с одним генератором примерно такие же.У нас не было датчика крутящего момента, так как они очень дороги, но мы заметили, что остановка ротора в условиях очень сильного ветра была гораздо более сложной физически, чем его остановка при умеренно сильном ветре, хотя наблюдаемые обороты были ненамного выше. Обратной стороной постоянного подключения нескольких генераторов является то, что дополнительная нагрузка на приводной диск увеличит «конечную скорость» и сделает ветряную мельницу непродуктивной в большем проценте условий слабого ветра.Поскольку 70-дюймовый ведущий диск имеет окружность 220 дюймов, каждое об / мин вала вращает 3-дюймовое линейное колесо конька на генераторе 23,35 раза. Это передаточный механизм, с помощью которого медленно вращающийся вал ротора вращает генератор на рабочих скоростях с минимальным трением. Стоимость этого первого прототипа оценивалась по-разному. При строго экономическом анализе его мощности по выработке электроэнергии оказалось, что он приносит небольшую пользу. В наших условиях, при средней скорости ветра 11 узлов на поверхности или вблизи поверхности. Согласно нашим данным, собранным за оценочный период, одна двухроторная башня будет производить около 650 кВтч электроэнергии в год.
По этой ставке, в зависимости от того, были ли включены затраты на рабочую силу и если да, то по каким ставкам, для возмещения затрат на ее строительство может потребоваться до 16 лет. Чтобы продержаться в течение этого времени, ротор должен быть изготовлен из обработанных давлением пиломатериалов и фанеры, а открытые края фанеры должны быть заключены в металлический U-образный канал для предотвращения расслоения. Эти обновления могут увеличить стоимость материалов примерно до 870 долларов на двухроторную башню. Чтобы повысить долговечность, мы начали рассматривать возможность изготовления второго прототипа из стали.Бочки на 55 галлонов часто используются для роторов Савониуса, но получаемая площадь парусов значительно меньше, чем у нашего прототипа из фанеры. С другой стороны, стальные топливные баки емкостью 275 галлонов имеют большую площадь парусов и, казалось, могут создать отличную чашу ротора, и в результате нашего опыта с Mark I мы начали рассматривать стальные топливные баки как альтернативный недорогой материал как часть пересмотренного дизайна. Еще одно наблюдение заключалось в том, что башню можно было значительно упростить. Использование панелей статора может иметь преимущество, но мы не смогли установить это точно.Во всяком случае, в большинстве современных дизайнов Савониуса их нет. Более простая башня без статоров может состоять всего из двух стоек с поперечной распоркой наверху вала и еще одной внизу. Эти элементы могут быть изготовлены из размеров 4 x 4 или 4 x 6 и соединяться по углам с помощью стальных усиливающих пластин. Такую башню будет быстрее построить и она будет более прочной, но для ее удержания в вертикальном положении потребуются растяжки.
Процесс проектирования Mark II
Конструкция Mark II была направлена на развитие базовых исследований деревянного ротора и повышение долговечности и конструкции башни без существенных дополнительных затрат.Ротор — это вся сталь, для которой требуется другой набор навыков, чем для деревянного строительства, но навыки резки и сварки металла являются общими, а конструкция проста в исполнении. В целом мы стремились сохранить преимущества Mark I, в том числе: 1. Простота конструкции и методов изготовления 2. Использование недорогих обычных материалов 3. Высокое соотношение выходной мощности к затратам на материалы, а также: 1. Снижение сложности конструкции башня 2. Устранение приводного диска в силовой передаче типа ВОМ.3. Повышение долговечности Подшипники Babbit были очевидным усовершенствованием автомобильных ступичных подшипников Mark I с точки зрения простоты установки и их способности поддерживать вал в промежуточном положении. Это упрощает использование мощности от нижнего конца вращающегося вала, доступного на открытом пространстве под ротором. Возможны различные средства трансмиссии, включая клиновые ремни, велосипедную цепь или цепь для оборудования или плоские ремни. В конце концов, мы решили использовать соединения отбора мощности и универсальные шарниры, так как это казалось идеальным для использования с планируемым винтовым насосом Archimedes.Мы решили построить трехроторную башню из трех баков для мазута объемом 275 галлонов лома. Этот размер будет достаточно маленьким, чтобы его можно было легко установить без крана, но при этом достаточно мощным и долговечным, чтобы обеспечить длительное обслуживание ирригационного насоса для обслуживания 6,5 акров. В то время как другие могут найти любое количество способов наилучшего использования энергии ветра, в ходе нашей работы с Savonius стало очевидно, что использование энергии нашей ветряной мельницы для перемещения воды приведет к явной экономии как денег, так и рабочей силы.В результате мы планировали стационарно установить второе устройство рядом с резервуаром, используемым для наших влажных рисовых полей. Осенью 2011 года мы начали строительство с обновленным дизайном.
Процесс строительства Mark II
Роторы состоят из половинок топливных баков емкостью 275 галлонов, которые были бесплатно доставлены из мусорного контейнера топливной компании. Опоры и трубы были удалены, их разрезали пополам и приварили к стальному валу с внешним диаметром 2 дюйма. После разрезания резервуары имели небольшой элемент гибкости, поэтому стальные стержни диаметром 3/8 дюйма были добавлены в качестве стабилизирующих ремней, как показано.Кроме того, было добавлено дополнительное стальное покрытие для усиления сварного шва, соединяющего резервуар со стальным валом сверху и снизу. Там, где танки стыковались, достаточно было их приварить друг к другу. Три ротора установлены с интервалами 60 градусов на валу, а не с интервалами 90 градусов на двухроторном валу. Мы решили постоянно приваривать роторы к валу, создавая целостную конструктивную единицу, вместо того, чтобы иметь какие-либо болтовые соединения. Вал выступает над и под роторами.Мы использовали баббитовые подшипники, которые легко прикреплялись к башне и позволяли валу выходить под нижнюю скобу для легкого соединения с 90-градусной коробкой передач в этом пространстве, как показано. Короткая распорная труба передает вес массива от сварного шва на нижнем парусе на стопорную втулку, которая опирается на нижний баббитовый подшипник. Мы приварили шток ВОМ категории 1 с наружной резьбой к нижней части вала и смогли использовать его для соединения редуктора с ременным приводом на 90 градусов, используя это соединение. К коробке передач приварили дополнительный вал отбора мощности, к которому можно подсоединить вал.Шкив ременного привода также может использоваться для передачи мощности с помощью плоского ремня, а также может использоваться для фрикционного торможения ротора для обслуживания. Модернизированная башня состоит из обработанных давлением 4х4 и имеет высоту около 19 футов. Мы установили вышку без крана и джина. Сначала заземляющие стойки 4 x 4 s были установлены в бетонные опоры, отрезаны на высоте 5 футов и вырезаны для соединения внахлест. Затем были вырезаны 16-дюймовые стороны башни для противоположной стороны стыка ниже и собраны с 4 x 4 и 2 x 8 наверху.Каретка элементов 2 x 6 x 8 ‘, прикрепленная болтами к внешней поверхности нижней части башни, добавляет прочности области соединения внахлест. Когда верх башни был завершен, мы прикрутили соединение внахлест с помощью одного болта. Верхняя балка теперь лежала на земле, а нижние стойки башни были прикреплены болтами к наземным столбам, чтобы служить «петлей» во время подъема. Анкеры заземления для растяжек мы разложили следующим образом. Оттяжки были сделаны из стального троса 1/4 дюйма и были обрезаны примерно до длины.Мы прикрепили два кабеля с той же стороны от наземных столбов, где лежала верхняя часть башни до подъема. Таким образом, кабели натянуты, когда башня станет вертикальной, и не позволят ей упасть на противоположную сторону. Остальные два троса были прикреплены к верхним углам, но пока висели свободно. Используя тракторный ковш и столбы для первоначального подъема, а также легкую лебедку с противоположной стороны после подъема, башня легко поднялась. После того, как башня была скреплена оцинкованными болтами с гальванической головкой 3/8 ”, ее можно было легко сделать вертикальной регулировкой растяжек.С затянутыми растяжками башня стала достаточно прочной, чтобы прислонить удлинительную лестницу к верхней балке и подняться по ней. В декабре 2011 года собранные роторы на валу были доставлены на место на фургоне размером 8 x 16 футов. Основание шахты было перемещено вплотную к нижней балке, а верхний конец лежал на земле. Во время этого движения на чашках ротора возникли вмятины, но мы смогли отбить их кувалдами. Затем подшипник и кронштейн подшипника были собраны на валу и привязаны к балке с помощью нейлоновых ремней с храповым механизмом, обеспечивающих достаточно слабину для поворота кронштейна во время подъема.Мы прикрепили шкив к верхней балке и пропустили через него стальной трос диаметром 1/4 дюйма, один конец которого обвивал вокруг верхнего стержня вала ротора, а другой был прикреплен к дышлу трактора. Сельскохозяйственный домкрат использовался для облегчения первоначального подъема верхнего конца башни — тяговое усилие трактора имеет небольшое механическое преимущество, пока вал не окажется на 20 градусов выше вертикали. Было бы хорошо иметь несколько добровольцев, которые помогли бы запустить подъемник, но мы выполнили эту работу всего вдвоем. Когда шахта приблизилась к вертикали, мы поднялись на башню, пропустили верхний баббитовый подшипник через верх вала и прикрутили его к верхней балке с помощью болтов с кареткой 1 / ”x 8”.Затем мы поднимаем домкрат и ковш трактора и устанавливаем роторный массив, чтобы прикрепить нижний опорный кронштейн к нижней балке с помощью болтов с квадратным подголовком. Из-за значительного веса устройства мы сочли необходимым установить диагональную скобу 4 x 4 для поддержки стального кронштейна и предотвращения его вращения из-за давления вала на подшипник баббита. Окончательную отвесность кронштейна подшипника мы проверили спиртовым уровнем. После установки ротор вращался при слабом ветре без шума подшипников.
Процесс оценки Mark II
Этот второй прототип, как упоминалось ранее, был установлен на постоянном месте рядом с водоемом-резервуаром для орошения. Это место находится на широкой плоской равнине без препятствий для ветра в пределах 1000 футов в любом направлении. Мы начали оценивать это устройство 7 января 2012 года. Было обнаружено, что он работает очень тихо, за исключением случаев, когда работа ведется на очень малых скоростях, когда шум пеленга иногда можно было услышать с близкого расстояния. В течение следующих двух недель мы могли наблюдать его во время метели, слабого ветра и при сильном ветре до 35 миль в час.Было замечено, что он поворачивает при очень слабом ветре (5 миль в час или меньше) и не пострадал при высокой скорости ветра. Фактически, независимо от скорости ветра, частота вращения агрегата никогда не превышала 60, что отражало наш опыт с отметкой I. Этот агрегат Mark II не включает в себя генератор, поэтому мы решили вместо этого оценивать его производительность путем измерения скорости и силы. от вращающегося карданного вала, чтобы установить мощность в лошадиных силах при типичных ветровых условиях. Вал тяги ветряной мельницы оканчивается штоком ВОМ на его нижнем конце.К нему подсоединяется редуктор ленточной молотилки с углом наклона 90 градусов, предназначенный для установки на трактор. Он крепится болтами к нижнему кронштейну подшипника, в котором просверлены отверстия для его установки и позволяющего направлять выходной вал в нескольких направлениях. Наша коробка передач увеличивает частоту вращения первичного приводного вала в соотношении 2,5 к 1. Окружность ременного шкива молотилки составляет 28,26 дюйма (2,36 фута). При ветре 6 миль в час (чуть ниже среднего по площадке) ротор вращался со скоростью 30 об / мин, в результате чего шкив ремня молотилки вращался на 75 об / мин.Вал опоры 30 об / мин * Передаточное число шкива 2,5 = 75 об / мин. Установление крутящего момента немного более принято и включает использование «зубчатого тормоза», который мы сконструировали с использованием короткого кожаного ремня, рычага и пары пружинных весов. По одной пружинной шкале прикреплены к каждому концу ремня. Одна из весов прикреплена к фиксированной точке на раме ротора, другая — к рычагу. Когда ремень наматывается на ременной шкив ротора, как показано, когда шкив не движется, и к рычагу прилагается усилие, обе шкалы регистрируют одинаковую прилагаемую силу.Затем мы сняли ремень и позволили ротору возобновить вращение с ветром. Когда он достиг 30 оборотов в минуту при скорости ветра 6 миль в час, мы повторно натянули ремень и натянули его с помощью рычага. Когда шкала рычага показала 35 фунтов, а фиксированная шкала показала 5 фунтов, ротор начал немного замедляться из-за силы торможения, поэтому мы сняли показания на этом этапе. Показание фиксированной шкалы вычитается из шкалы рычага для чистой нагрузки 30 фунтов. Для определения мощности мы использовали следующее уравнение: л.с. = полезная нагрузка x окружность x об / мин / 33 000. Подставив наши числа в уравнение, мы получили значение мощности в лошадиных силах, равное 0.16 Это превзошло наши ожидания, учитывая слабый ветер. Даже при таком слабом ветре у ветряной мельницы достаточно крутящего момента, чтобы повернуть наш винтовой насос Архимеда, чтобы перекачивать 4500 галлонов воды в час, или чтобы повернуть мельницу. Используя это приблизительное измерение, мы с инженером Сэмом Гортоном приблизили эффективность устройства Mark II (или, другими словами, процент энергии ветра, который он улавливает) примерно на уровне 30%, что вполне прилично для VAWT. Это, конечно, оценка, так как точный КПД можно было полностью и точно измерить с течением времени только с помощью датчика крутящего момента, который выходил за рамки нашего бюджета для проекта.Тем не менее эти результаты предполагают, что это устройство, вероятно, будет экономичным инструментом для улавливания энергии. Конечно, любое использование этой захваченной энергии должно быть адаптировано к более низкой скорости выходного вала и любым потерям эффективности из-за зубчатой передачи или трансмиссии. Используя наш приблизительный рейтинг эффективности, мы оцениваем, что устройство Mark II будет вырабатывать 182 Вт фактической мощности в типичных условиях площадки при ветре 11 миль в час, при расчетном общем годовом производстве около 1600 киловатт-часов в год, что для нашей фермы равно около 3 ежемесячных счетов на сумму около 110 долларов или около 330 долларов в год.Для установки потребовалось всего 935 долларов на материалы, поэтому срок окупаемости всего 3 года. Если изготовителям платят 25 долларов в час за его сборку и установку (всего 104 часа в нашем случае) при общем счете на оплату труда 2600 долларов, то добавление затрат на рабочую силу все равно приводит к низкому периоду окупаемости в 10,7 лет.