Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.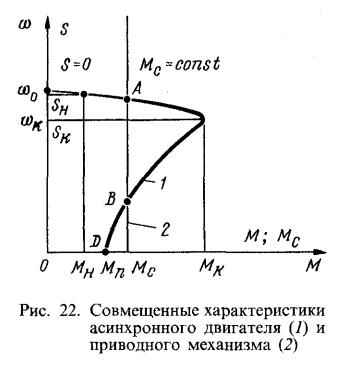
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.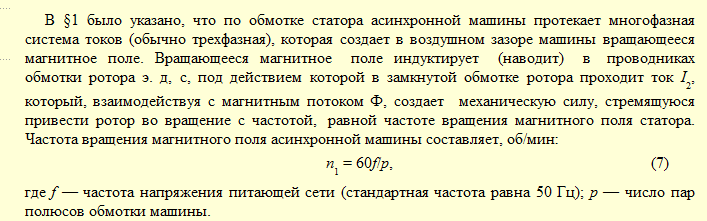
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Регулирование частоты вращения асинхронного электродвигателя | Полезные статьи
Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения.
 Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения. - Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
 Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
Есть несколько способов регулирования частоты вращения электродвигателя:
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
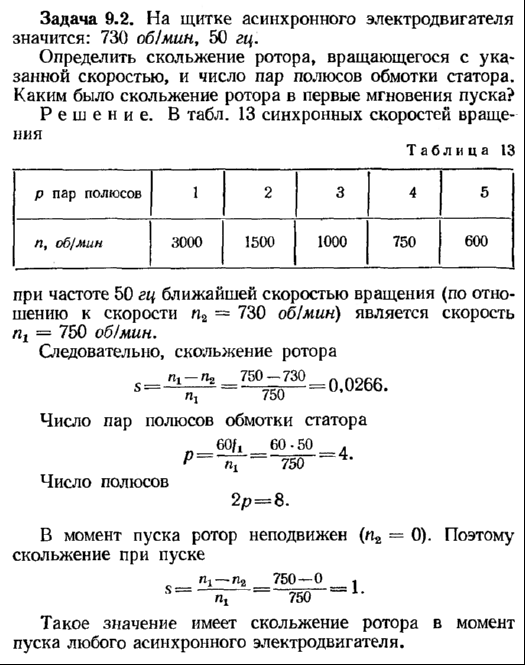
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора.
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту [email protected] с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. Вложите в письмо ссылку на страницу с ошибкой, пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Коды баннеров проекта DPVA.ru Начинка: KJR Publisiers Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Free xml sitemap generator Free xml sitemap generator | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Методы регулирования частоты вращения двигателей
Частота вращения асинхронного двигателя определяется скоростью вращения магнитного поля и числом полюсов. Существуют два основных способа регулировать частоту вращения асинхронного двигателя: включение резисторов в цепь фазного ротора, изменение количества полюсов, образующих вращающееся магнитного поля.
Для осуществления первого способа применяются двигатели с фазными роторами. При этом в цепь двигателя вводят трехфазный реостат, который должен быть рассчитанным на длительную нагрузку током ротора. При увеличении активного сопротивления цепи изменяется характеристика М = F (s) — она становится более пологой.
Если, не изменяя момента на валу двигателя, увеличить сопротивление цепи ротора постепенным увеличением сопротивления реостата, рабочая точка сместится с одной кривой M = F (s) на другую, которая соответствует увеличенному сопротивлению цепи ротора, т. е. будет расти скольжение, и поэтому снизится частота вращения двигателя. Таким способом изменяется частота вращения ротора от номинального скольжения до абсолютной остановки. Недостатком способа являются слишком большие потери энергии.
е. будет расти скольжение, и поэтому снизится частота вращения двигателя. Таким способом изменяется частота вращения ротора от номинального скольжения до абсолютной остановки. Недостатком способа являются слишком большие потери энергии.
Зная отношение величин можно сделать вывод, что доля механической мощности уменьшается с уменьшением частоты ротора, при этом возрастает величина потерь в сопротивлениях цепи ротора. Мощность, которую забирает двигатель из сети, не изменяется, т. е. для уменьшения скорости вращения двигателя необходимо включить в цепь ротора сопротивление, которое вынуждает превращаться в тепло большую часть энергии. Среди недостатков данного способа является то, что включение сопротивления уменьшает устойчивость работы двигателя, поскольку небольшое изменение нагрузки приводит к значительным изменениям частоты вращения двигателя.
Для плавного регулирования частоты вращения двигателя в цепи изменяют напряжение на зажимах статора. Такой вид регулирования применим к двигателям с короткозамкнутым ротором. Если учесть, что вращающий момент двигателей прямо пропорционален квадрату напряжения, координата механической характеристики уменьшается в отношении.
Если учесть, что вращающий момент двигателей прямо пропорционален квадрату напряжения, координата механической характеристики уменьшается в отношении.
Скачкообразное изменение скоростей вращения двигателя возможно осуществить усложнением конструкций асинхронных двигателей. Оно связано с переключением числа полюсов двигателей. Подобным образом будут отличаться и частоты вращения ротора двигателя. Обмотку ротора двигателя в этом случае нужно выполнить в форме беличьего колеса, для которого количество фаз изменяется с изменением числа полюсов поля.
При этих условиях количество полюсов обмоток статора ничем не связано и выбирается любым в зависимости от условий работы двигателя. Регулирование при этом осуществляется скачкообразным изменением частоты вращения поля двигателя. Однако частоту вращения ротора нельзя изменить скачкообразно вследствие наличия инерции всей системы электропривода. Только после переключения наступает изменение частоты вращения ротора. Еще одним методом управления частотой вращения асинхронного двигателя является изменение частоты переменного тока, который питает двигатель.
U1 ? 4,44f?1kоб1Фв.
При этом условии активные материалы двигателя полностью используются. Значит, изменение частоты должно сопровождаться поддержанием вращающего момента постоянным, что осуществляется изменением напряжение на зажимах статора.
Принцип действия асинхронного двигателя ~ Электропривод
Самым распространенным электродвигателем, используемым в быту, промышленности, строительстве и сельском хозяйстве, на сегодняшний день, является асинхронный двигатель с короткозамкнутым ротором (АД с КЗ ротором). Основным его преимуществом, перед другими типами двигателей является простота, надежность и дешевизна.
Принцип действия трехфазного асинхронного двигателя с короткозамкнутым ротором
Принцип действия трехфазного АД с КЗ ротором основан на взаимодействии вращающегося магнитного поля и расположенного в этом поле проводника. Вращающееся магнитное поле создается статором асинхронного двигателя, которая является неподвижной частью двигателя. Статор асинхронного электродвигателя представляет собой стальной сердечник, с пазами в которых расположена обмотки, намотанная медным изолированным проводом.
Вращающееся магнитное поле создается статором асинхронного двигателя, которая является неподвижной частью двигателя. Статор асинхронного электродвигателя представляет собой стальной сердечник, с пазами в которых расположена обмотки, намотанная медным изолированным проводом.
Это поле пересекая обмотку ротора наводит в ней ЭДС. Под действием этой ЭДС по обмотке будет протекать ток. Этот ток будет взаимодействовать с магнитным потоком. Взаимодействие вращающего магнитного поля статора с током в роторе создает вращающий момент, за счет которого ротор будет вращаться в ту же сторону, что и поле, но с небольшим отставанием.
Обмотки статора намотаны таким образом, что образуют три катушки, смещенные друг, относительно друга на 120°. Между собой их соединяют либо в «звезду», либо в «треугольник» и пропускают трехфазный переменный ток. При частоте тока 50 Гц, магнитное поле будет вращаться со скоростью 3000 об./мин. Магнитное поле, образованное тремя катушками, называется двухполюсным.
Особенностью асинхронного двигателя является то, что появление ЭДС в роторной обмотке ротора возможно только при различии частоты вращения магнитного поля ротора, обозначаемое букой n и магнитного поля статора n0. Разница n0 и n создает электромагнитный момента асинхронного двигателя. Характеризует эту разность скольжение S, определяемое по формуле:
S=( n0-n )/ n0,
где n0=60f/P синхронная частота вращения магнитного поля статора об/мин, f- частота питающей сети, Гц, p-число пар полюсов статора.
В такой конструкции двигателя, магнитное поле статора опережает скорость вращения ротора. Т.е. поле ротора вращается асинхронно со скоростью вращения поля статора. Отсюда и пошло название двигателя асинхронный двигатель переменного тока.
Если нагрузка на валу двигателя отсутствует, частота вращения поля ротора n, стремиться достичь частоты вращения поля ротора, но никогда не достигает ее, так как если n0-n=0, то и электромагнитный момент двигателя М будет равен 0.
В паспорте и на шильдике асинхронного электродвигателя производитель указывает номинальную частота вращения двигателя, замеряемую при номинальной мощности. При увеличении нагрузки на валу двигателя, частота вращения двигателя уменьшается, а ток статора увеличивается. Асинхронные двигатели могут изготовляться с 1,2,3 ,4,5,6 парами полюсов. Соответственно синхронная скорость вращения асинхронного двигателя соответственно будет составлять 3000, 1500, 1000, 750, 600 и 500 об/мин.
На смену классической конструкции асинхронного двигателя приходят энергоэффективные конструкции асинхронных двигателей обладающие более высоким КПД и технико-экономическими показателями. Применение частотно-регулируемого привода в тандеме с энергоэффективными двигателями, позволит существенно улучшить энергетические показатели и снизить затраты на электроэнергию.
формул асинхронного двигателя с расчетами
Электродвигатели — это машины, которые преобразуют входную электрическую энергию в механическую энергию. Все двигатели состоят из статора (неподвижная часть) и ротора (вращающаяся часть). Поскольку двигатель работает от электричества, с его работой связаны различные свойства. Такие свойства включают количество полюсов, скорость, частоту, скольжение, пусковой ток и номинальную мощность в лошадиных силах. Ранее мы публиковали книгу по двигателям переменного тока, в которой кратко объясняются все эти свойства, этот пост посвящен формулам асинхронных двигателей и примерам расчетов.
Синхронная скорость, частота и полюса
Синхронная скорость, частота и количество полюсов асинхронного двигателя связаны формулой:
η синхронизация = (120 * f e ) / P
η синхронизация = синхронная скорость
f e = частота системы
P = количество полюсов, установленных в машине
Расчет: Найдите синхронную скорость 4-полюсного асинхронного двигателя, который работает с частотой 60 Гц.
Решение: η синхр. = 120 * 60/4 = 1800 об / мин
Мотор скольжения
Пробуксовку двигателя можно найти по формуле:
с = (η синхр. -η м ) / η синхр. * 100
η синхронизация = Скорость магнитного поля
η м = Механическая частота вращения вала
Расчет: Скорость ротора 4-полюсного асинхронного двигателя при 50 Гц составляет 1200 об / мин. Рассчитайте его скольжение.
Решение: Скорость ротора = η м = 1200 об / мин
Где η синхрон = 120 * 50/4 = 1500 об / мин
с = (1500 — 1200) / 1500 * 100 = 20
Крутящий момент, мощность и скорость
τ инд = P / ω м
τ ind = индуцированный крутящий момент в Нм
P = мощность в кВт
ω м = Скорость в об / мин
Расчет: Найдите крутящий момент на валу асинхронного двигателя мощностью 10 л.с., скорость ротора которого составляет 1500 об / мин.
Решение: τ ind = (10 л.с. * 746 кВт / л.с.) / (1500 об / мин * 2 π рад / об * 1 мин / 60 с) = 47,49 Нм
Калькулятор пускового тока
I L = S начало / (√3 * V T ),
, где S start = Номинальная мощность двигателя * Кодовый коэффициент
(Кодовый коэффициент — это число, которое зарезервировано для класса). Например, все двигатели класса A имеют фиксированный кодовый коэффициент, который в приведенном выше уравнении следует умножить на номинальную мощность.)
В T = Номинальное напряжение
Расчет: Найдите пусковой ток 10 л.с., трехфазный двигатель 220 В класса А.
Решение: Максимальное значение кВА / л.с. для двигателя класса A составляет 3,15 (кодовый коэффициент).
S start = 10 л.с. * 3,15 = 31,5 кВА
I L = 31,5 кВА / (√3 * 220) = 82,66 А
Возможно, вы захотите узнать: Как рассчитать ток от HP
| ||||||||||||||||||||||||||||||||||||
Скорость ротора — обзор
Две стратегии атаки
Увеличить скорость ротора Зараженный вирус сработал первым инфицированным Ираном -1 центрифуга, чтобы увеличить ее с нормальной рабочей скорости 1064 Гц до 1410 Гц в течение 15 минут, прежде чем вернуться к нормальной частоте.Двадцать семь дней спустя вирус снова начал действовать, замедляя зараженные центрифуги до нескольких сотен герц на полные 50 минут. Напряжения от чрезмерных, а затем более низких скоростей заставляли алюминиевые центробежные трубки расширяться, часто заставляя части центрифуг приходить в достаточный контакт друг с другом, чтобы разрушить машину.
Нарушить давление газа: После тщательного анализа мы можем теперь подтвердить, что код атаки устройства с программируемым логическим контроллером (ПЛК) 417 изменяет состояние клапанов, используемых для подачи UF6 (газ гексафторида урана) в систему обогащения урана. центрифуги.Атака по существу закрывает клапаны, вызывая нарушение потока и, возможно, разрушение центрифуг и связанных с ними систем. Кроме того, код будет делать снимки нормального рабочего состояния системы, а затем воспроизводить нормальные рабочие значения во время атаки, чтобы операторы не знали, что система не работает нормально. Это также предотвратит изменение состояний клапана в случае, если оператор попытается изменить какие-либо настройки в ходе цикла атаки. Природный уран состоит из трех изотопов; большинство (99.274%) — это U-238, примерно 0,72% — это делящийся U-235, а оставшиеся 0,0055% — это U-234. Если природный уран обогащен до 3% по U-235, его можно использовать в качестве топлива для легководных ядерных реакторов. Если он будет обогащен до 90% урана-235, его можно будет использовать в ядерном оружии.
Затем вирус-червь распространяется по сети, сканируя программное обеспечение Siemens Step 7 на компьютерах, управляющих ПЛК. В отсутствие обоих критериев Stuxnet бездействует внутри компьютера. Если оба условия выполняются, Stuxnet вводит зараженный руткит в ПЛК и в программное обеспечение Step 7, изменяя коды и давая неожиданные команды ПЛК, возвращая пользователям обратную связь значений системы нормальных операций.Вот еще немного подробностей для наших опытных читателей:
Теперь, когда Stuxnet работает без ведома пользователя; он может двигаться дальше к своим целям. Машины Windows в системе диспетчерского управления и сбора данных (SCADA) обмениваются данными с ПЛК посредством программы WinCC / PS7, или шага 7. Эта программа по существу переводит пользовательские команды в полезные команды для ПЛК с использованием набора библиотек. Когда установлен Stuxnet, он нацелен на одну из этих библиотек (s7otbxdx.dll), которая, помимо прочего, содержит переводы для чтения и записи новых процессов для ПЛК.Он использует эксплойт нулевого дня в базе данных WinCC (черный пароль, который поставляется вместе с программным обеспечением), чтобы предоставить себе доступ к библиотекам базы данных. Stuxnet переименовывает s7otbxdx.dll в s7otbxsx.dll и заменяет исходную библиотеку модифицированной версией. Эта модифицированная библиотека содержит почти все, что есть в оригинале, но некоторые команды намеренно переведены неправильно. На рис. 4.5 показана схема атаки и замены исходного кода Step 7 кодом Stuxnet.
Рисунок 4.5. Программное обеспечение Step-7 было скомпрометировано путем замены исходного управляющего файла Windows и имплантации 7otbxdx.dll (библиотеки динамической компоновки), в которую был загружен вредоносный код Stuxnet. Исходный контрольный файл был деактивирован, и Stuxnet взял на себя работу центрифуг .
Из библиотеки MERIT CyberSecurity.Сейчас U-235 — единственная разновидность или изотоп урана, который взорвался. Другими словами, только U-235 может использоваться в ядерном оружии или ядерном реакторе. Но U-235 и U-238 химически идентичны.Как их разделить? Вы объединяете уран с невероятно химически активным газом фтором, чтобы получить новый газ — гексафторид урана. Затем вы закачиваете этот радиоактивный газ в центрифугу и вращаете неделю за неделей.
Когда-либо так медленно, газ с более тяжелым U-238 постепенно выбрасывается к внешней стенке вращающейся центрифуги, тогда как газ с менее тяжелым U-235 остается в центре. Но в этот центральный газ по-прежнему примешано много более тяжелого газа U-238, поэтому вы берете этот центральный газ и загружаете его в другую центрифугу, вращаете его еще несколько недель или месяцев и повторяете снова и снова.Конечно, чтобы быть действительно эффективной, центрифуга должна вращаться очень быстро, настолько быстро, что от самоуничтожения остается всего несколько процентов. К апрелю 2008 года на подземном заводе по производству урановых центрифуг в Натанзе, Иран, было запущено и вращалось около 6000 центрифуг.
Формулы и уравнения для линейных и асинхронных двигателей
Формулы и уравнения для Линейные и индукционные двигателиСледующие уравнения и формулы относящиеся к линейным и асинхронным двигателям, могут использоваться для расчета основных параметров при анализе и проектировании однофазного и трехфазного асинхронного двигателя.
Формула и уравнения для асинхронного двигателя:
Индуцированная ЭДС:e ind = vB l
где
- e ind
0 = 9017 e ind
0 = индуцированная скорость v. ротор
- B = плотность магнитного потока
- l = длина проводников внутри магнитного поля
Ток ротора определяется по формуле:
Используемые термины в уравнениях и формулах крутящего момента двигателя.
- Н с = Синхронная скорость
- с = скольжение двигателя
- с b = пробой или вырывное скольжение
- E 1 = напряжение статора или входное напряжение напряжение
- E 2 = ЭДС ротора на фазу в состоянии покоя
- R 2 = Сопротивление ротора по фазе
- X 2 = Реактивное сопротивление ротора по фазе
- В напряжение
- K = соотношение оборотов ротора / статора на фазу
Пусковой момент
- Условие максимального пускового момента
R 2 = X 2
Связь с напряжением питанияT st α V 2
- Крутящий момент в рабочем состоянии 90 320
- Условия максимального рабочего крутящего момента
R 2 = sX 2
- Отношение крутящего момента 65000 с макс. асинхронного двигателя:
Скорость скольжения — это разница между синхронной скоростью и скоростью ротора;
- N скольжение = N с — N (скорость в об / мин)
- ω скольжение = ω с — ω (угловая скорость в рад / с)
где
- N скольжение = скорость скольжения
- N с = синхронная скорость = 120f / P
- N = скорость ротора двигателя
скольжение асинхронного двигателя — это относительный показатель, выраженный в процентах.Это определяется как:
Где
Скорость ротора :Скорость ротора асинхронного двигателя определяется как
- N = (1-s) N s (Скорость в об / мин. )
- ω = (1 с) ω с (Угловая скорость в рад / с)
Где
- f r = Частота ротора
- f = Частота сети
- P = Число полюсов
Связанные термины, используемые в формулах и уравнениях мощности двигателя.
- P 1 = Входная мощность статора
- P 2 = Входная мощность ротора
- P м = Полная выходная мощность ротора
- P out = Выходная мощность
- T г = полный крутящий момент
- T sh = крутящий момент вала
Входная мощность ротора:
P 2 = T г ω с
- Полная выходная мощность ротора:
- P cr = I 2 R = Потери в меди на роторе
- = с = ширина одного шага полюса
- f = линейная частота
- v с = линейная синхронная скорость
- v = фактическая скорость
- Если N с — синхронная скорость в оборотах в минуту.
- N r — фактическая частота вращения ротора в оборотах в минуту.
- n с — синхронная скорость в оборотах в секунду
- n r — фактическая частота вращения ротора в оборотах в секунду.
- Пуск с нулевой скорости
- Ускорение с t1
- Постоянная частота вращения при Нм в течение t0-t1-t1
- Замедлить с t1
- Остановка на нулевой скорости
P = T g ω
P out = T sh ω
P1 = P2 + потери статора = P m + потери меди в роторе = P out + потери на ветер и трение
Входная мощность ротора: Выходная мощность Механическая мощность: Коэффициент потерь Cu в роторе:
Где
Крутящий момент, при котором машина на синхронной скорости будет генерировать один ватт;
КПД асинхронного двигателя:Формула и уравнения для линейного асинхронного двигателя:
Синхронная скорость:
Где- 3 линейная скорость
Где
902 Усилие
:Где
P 2 = Входная мощность ротора
Потери меди в роторе: Полная механическая мощность:Связанные формулы и уравнения «Скорость скольжения в асинхронном двигателе»? — его важность
Определение: Скольжение в асинхронном двигателе — это разница между скоростью основного потока и скоростью их ротора.Символ S обозначает скольжение. Выражается в процентах от синхронной скорости. Математически это записывается как
Значение скольжения при полной нагрузке варьируется от до 6% от для маленького двигателя и 2% для большого двигателя.
Асинхронный двигатель никогда не работает с синхронной скоростью. Скорость ротора всегда меньше синхронной скорости. Если скорость ротора равна синхронной скорости, относительного движения между неподвижными проводниками ротора и основным полем не происходит.
Тогда в роторе не возникает ЭДС, и на проводниках ротора возникает нулевой ток. Электромагнитный момент также не индуцируется. Таким образом, скорость ротора всегда немного меньше синхронной скорости. Скорость, с которой работает асинхронный двигатель, известна как скорость скольжения .
Разница между синхронной скоростью и фактической скоростью ротора называется скоростью скольжения. Другими словами, скорость скольжения показывает относительную скорость ротора относительно скорости поля.
Скорость ротора немного меньше синхронной скорости. Таким образом, скорость скольжения выражает скорость ротора относительно поля.
Скорость скольжения асинхронного двигателя определяется как,
.Дробная часть синхронной скорости называется Per Unit Slip или Fractional Slip .Промежуточное скольжение называется Slip . Обозначается s.
Следовательно, скорость ротора определяется уравнением, показанным ниже:
Альтернативно, если
Затем,
Процентное скольжение оборотов в секунду показано, как показано ниже.
Скольжение асинхронного двигателя варьируется от 5 процентов для малых двигателей до 2 процентов для больших двигателей.
Важность скольжения
Скольжение играет важную роль в асинхронном двигателе. Как мы знаем, скорость скольжения — это разница между синхронной скоростью и скоростью ротора асинхронного двигателя. ЭДС возникает в роторе из-за относительного движения или, можно сказать, скорости скольжения двигателя. Итак,
Ток ротора прямо пропорционален наведенной ЭДС.
Крутящий момент прямо пропорционален току ротора.
Следовательно, крутящий момент прямо пропорционален скольжению.
Приведенное выше уравнение показывает, что крутящий момент, создаваемый на роторе, прямо пропорционален скольжению асинхронного двигателя. Большое значение скольжения вызывает в роторе ЭДС. Эта ЭДС создает большой крутящий момент на проводниках ротора.
Значение скольжения регулируется с учетом нагрузки на двигатель. Для полной нагрузки требуется высокое значение крутящего момента. Этого можно достичь, увеличив скольжение и уменьшив скорость ротора. Скольжение двигателя остается низким, когда асинхронный двигатель работает без нагрузки.Небольшое скольжение создает небольшой крутящий момент на двигателе.
Значение скольжения асинхронного двигателя регулируется в соответствии с требованием крутящего момента при нормальных рабочих условиях.
Скорость, момент ускорения и среднеквадратичный крутящий момент
Теперь, когда мы понимаем расчеты момента нагрузки и инерции нагрузки, мы немного приблизились к выбору двигателя. Вам может быть интересно, почему я разделил вычисления момента нагрузки и момента ускорения. Это потому, что для расчета момента ускорения сначала необходимо рассчитать инерцию нагрузки и скорость.
СОВЕТ: давайте рассмотрим первый
In, крутящий момент нагрузки определяется как величина крутящего момента, постоянно необходимая для приложения, и включает фрикционную нагрузку и гравитационную нагрузку.
In, инерция нагрузки определяется как сопротивление любого физического объекта любому изменению его скорости с точки зрения оси вращения.
Здесь мы показываем типичный профиль движения с областью ускорения, постоянной скорости и замедления.
Момент разгона / торможения В отличие от крутящего момента нагрузки (который является постоянным), крутящий момент ускорения — это крутящий момент, необходимый для ускорения инерционной нагрузки до ее целевой скорости или для замедления от заданной скорости до нуля.Он присутствует только при ускорении (или замедлении) инерционной нагрузки и может быть больше или меньше момента нагрузки.
Общий требуемый крутящий момент представляет собой сумму крутящего момента нагрузки и крутящего момента ускорения, как показано ниже (с коэффициентом безопасности, который необходимо покрыть для того, чего мы не знаем).
Математически момент ускорения складывается из инерции нагрузки и скорости ускорения, как показано ниже. Это наиболее распространенное уравнение, используемое для расчета момента ускорения для всех типов двигателей.
Шаговые двигатели и серводвигатели могут использовать другую формулу, поскольку они имеют дело со скоростью импульса (Гц). Доступны два уравнения для 2 типов профилей движения: с ускорением / замедлением или без него.
Для линейной системы все линейные единицы, такие как требуемая скорость, необходимо преобразовать обратно в число оборотов в минуту или Гц в терминах двигателя. Целью этого является определение (по кривой крутящего момента двигателя), достаточен ли крутящий момент на этой скорости. Эти преобразования скорости довольно просты, и вы можете вычислить формулы, просто используя логику.
об / мин на поворотном устройстве — это довольно просто. Однако, чтобы преобразовать линейные единицы измерения в вращательные, вам нужно будет выполнить преобразование с правильным коэффициентом. Например, для ремня и шкивов используйте окружность шкива. Для шарико-винтовых пар используйте шаг винта. Для звездочек и цепи используйте средний диаметр звездочки или количество зубьев. Для рейки и шестерни используйте шаг рейки.
Существует два основных способа рассчитать требуемую скорость в зависимости от предпочтений.
Вот несколько формул, в которых используется «об / мин», где PB — шаг винта, VL — линейная скорость, J0 — инерция ротора, JL — инерция нагрузки и t1 время разгона.
Требуемая частота вращения ( Нм, ):
Требуемый момент ускорения ( Ta, ):
Вот несколько формул, в которых используется «Гц».Инженеры Oriental Motor обычно используют формулы импульса (Гц), как показано ниже.
Количество рабочих импульсов A
Количество рабочих импульсов выражается как количество импульсных сигналов, которые в сумме составляют угол, на который двигатель должен вращаться, чтобы передать нагрузку из точки A в точку B.
Скорость рабочего импульса f2 (Гц)
Скорость рабочего импульса может быть получена из количества рабочих импульсов, времени позиционирования и времени ускорения (замедления).
1) Для ускорения / замедления
Уровень времени разгона (замедления) — важный момент. Время ускорения (замедления) не может быть легко установлено, потому что оно коррелирует с моментом ускорения и темпами ускорения / замедления.
Первоначально в качестве справки рассчитайте время ускорения (замедления) примерно на 25% времени позиционирования. (Расчет должен быть скорректирован перед окончательным выбором.)
2) Для запуска / остановки
СОВЕТ: Зачем вообще использовать ускорение / замедление?
Это потому, что даже если немедленный запуск с заданной скоростью может показаться проще, но это приводит к большому крутящему моменту ускорения и, следовательно, требует более мощного двигателя.Более крупный двигатель также означает более высокую стоимость и большую занимаемую площадь, что не является самым желательным для конструкции машины.
Вот пример расчета, которому вы можете следовать. Не могу сказать, насколько мне помогли эти примеры.
Пример: расчет момента нагрузки и инерции нагрузки В следующем примере давайте попробуем вычислить момент нагрузки, инерцию нагрузки и момент ускорения, используя то, что мы уже узнали.Лично я сначала рассчитываю инерцию нагрузки, затем момент нагрузки, затем скорость, а затем момент ускорения. Информация ниже описывает моторный механизм и заданные параметры.
Рассчитайте инерцию нагрузки для винта, затем таблицы и нагрузки по отдельности, затем сложите их. Инерцию нагрузки можно использовать для предварительного выбора двигателя, который я немного объясню.
Используйте уравнение крутящего момента нагрузки для винтов и заполните все пропуски для переменных.Убедитесь, что вы используете правильное уравнение для конкретного приложения.
Требуемая скорость рассчитывается по следующему уравнению. Используйте шаг / шаг винта PB , чтобы преобразовать линейную скорость в об / мин. В этом случае мы использовали формулу RPM, а не Hz.
Шаг 4: Момент ускорения Вот общая формула ускоряющего момента для всех двигателей.
Нам просто нужно заполнить пропуски для переменных. Чтобы рассчитать ускоряющий момент Ta, предварительно выбирает двигатель на основе инерции нагрузки (как упоминалось ранее), затем подставляет значение J0 инерции ротора для этого двигателя в уравнение ускоряющего момента. Невозможно рассчитать инерцию нагрузки без инерции ротора двигателя.
СОВЕТ: как предварительно выбрать двигатель на основе инерции нагрузки
Для двигателей переменного тока с постоянной скоростью, двигателей переменного тока с регулировкой скорости и бесщеточных двигателей с регулировкой скорости вам нужно будет посмотреть на допустимые значения инерции нагрузки .Для шаговых двигателей или серводвигателей вам необходимо знать допустимое отношение инерции , с которым может работать каждый тип двигателя.
Для шаговых двигателей общее правило состоит в том, чтобы поддерживать коэффициент инерции (инерция нагрузки или инерция отраженной нагрузки, деленная на инерцию ротора) ниже 10: 1 и 5: 1 для более быстрых профилей движения или меньших размеров корпуса, чем NEMA 17.
Для шаговых двигателей с обратной связью рекомендуется коэффициент инерции до 30: 1.
Для серводвигателей с автонастройкой коэффициент инерции увеличивается до 50: 1.Для серводвигателей с ручной настройкой он может увеличиваться до 100: 1.
После того, как вы сделаете предварительный выбор двигателя на основе инерции нагрузки, найдите инерцию ротора двигателя в технических характеристиках, затем введите значение для J0 , чтобы завершить расчет ускоряющего момента.
Просто для удовольствия, вот еще одно уравнение для крутящего момента ускорения в единицах Гц. « i » — передаточное число.
Шаг 5: Общий требуемый крутящий момент и коэффициент безопасности Сложите крутящий момент нагрузки и крутящий момент ускорения для получения общего требуемого крутящего момента.Нам понадобится шаговый двигатель, который может выдавать крутящий момент не менее 0,85 Нм.
Однако это без запаса прочности. Если вы используете коэффициент безопасности 2, то нам понадобится шаговый двигатель, который может выдавать крутящий момент 1,7 Нм при примерно 1200 об / мин; в зависимости от скорости разгона / замедления. Коэффициенты безопасности определяются на основе точности переменных.
СОВЕТ : Не используйте максимальный удерживающий момент для шаговых двигателей размера .Для шаговых двигателей важно не использовать спецификацию «максимального удерживающего момента» для выбора двигателя, поскольку он измеряется при нулевой скорости и полном токе.
Поскольку крутящий момент, создаваемый шаговым двигателем, уменьшается с увеличением скорости, вам нужно будет посмотреть на кривую скорость-крутящий момент, чтобы определить, будет ли шаговый двигатель работать с этой скоростью или нет. Как правило, выбор двигателя на основе общего требуемого крутящего момента и максимальной требуемой скорости является безопасной ставкой, даже если двигатель может не нуждаться в этом крутящем моменте на его максимальной скорости. Небольшое увеличение размера, если все сделано правильно, может продлить срок службы или улучшить характеристики двигателя.
Шаг 6: среднеквадратичный крутящий момент (серводвигатели) Для серводвигателей необходимо выполнить еще один расчет — среднеквадратичный крутящий момент.Среднеквадратичный крутящий момент, или среднеквадратичный крутящий момент, относится к среднему значению крутящего момента, которое учитывает все изменяющиеся значения крутящего момента, используемые во время работы, а также продолжительность времени, необходимого для каждого значения крутящего момента. Среднеквадратичный крутящий момент используется для определения правильности размера двигателя во избежание тепловой перегрузки.
Для серводвигателей требуемый крутящий момент должен быть ниже пикового крутящего момента двигателя, а среднеквадратичный крутящий момент должен быть ниже номинального крутящего момента двигателя. Поскольку пиковый крутящий момент требует высокого уровня тока двигателя, его нельзя поддерживать непрерывно без перегрева двигателя.
Давайте теперь посмотрим на уравнение для среднеквадратичного крутящего момента и визуализируем переменные в шаблоне профиля движения.
Вот расчет для этого примера.
Здесь t1 + t2 + t3 = 2,1 [с] от рабочего цикла и t1 = t3 = 0,1 для времени разгона и замедления. Следовательно, t2 = 2,1-0,1 — 0,1 = 1,9 [с].
Отношение (эффективный коэффициент запаса прочности) Trms к номинальному крутящему моменту серводвигателя TM выражается следующей формулой.
Обычно двигатель может работать при эффективном коэффициенте безопасности нагрузки 1,5 ~ 2 или более.
СОВЕТ : Подробнее о среднеквадратичном крутящем моменте Для получения дополнительной информации о крутящем моменте RMS, вот хорошая статья из Linear Motion Tips (Design World),. Для этого приложения нам необходим двигатель с высокой точностью позиционирования (остановки), который может быть либо шаговым, либо серводвигателем.
Для шагового двигателя мы должны соответствовать или превосходить следующие требования.
Инерция нагрузки = 5,56 × 10-4 [кг · м2]
Общий крутящий момент = 0,85 [Н · м] *
Максимальная скорость = 1200 об / мин]
Для серводвигателя мы должны соответствовать или превосходить следующие требования.
Инерция нагрузки = 5,56 × 10-4 [кг · м2]
Общий крутящий момент = 0.85 [Н · м] *
RMS крутящий момент = 0,24 [Н · м]
Максимальная скорость = 1200 об / мин]
* Расчетный крутящий момент не включает коэффициент безопасности.
Теперь, имея крутящий момент, инерцию нагрузки и значение скорости, у нас есть достаточно информации для выбора двигателя. Однако есть еще один важный критерий, который следует учитывать, чтобы поддерживать долгую жизнь. ПОДСКАЗКА: это как-то связано с подшипниками. Подпишитесь, чтобы получать новые сообщения.
Вот руководство по выбору двигателя (PDF), которое вы можете загрузить и сохранить при себе.
Следующая:
Связанный:
СОВЕТ: Есть ли более простой способ подобрать двигатели?
Используйте инструмент для определения размеров двигателя. К вашему сведению, преобразование единиц измерения выполняется автоматически с помощью наших инструментов для определения размеров двигателя. Сэкономьте время для чего-нибудь более важного.
Пример: AGV
Однофазный двигатель переменного тока — Центр электротехники
Основные принципы работыЭлектромагнитное поле, создаваемое статором, не вращается.Это повторитель между полюсами, поскольку переменное напряжение на полюсах меняет полярность.
Индуцированное напряжение в роторе является результатом магнитной индукции, а затем магнитного поля, создаваемого вокруг ротора. Это поле противоположно полю статора (закон Ленца).
Типы однофазных электродвигателей переменного токаСуществует четыре типа однофазных двигателей переменного тока, которые используются следующим образом:
1) Двигатель с расщепленной фазой
2) Пусковой резистор Двигатель
3) Конденсаторный двигатель
4) Асинхронный двигатель с экранированными полюсами
В следующем посте я подробно расскажу о четырех (4) типах однофазных двигателей переменного тока.
Как рассчитать скорость однофазного двигателя?
Скорость асинхронного двигателя зависит от конструкции двигателя, синхронная скорость определяется частотой и количеством входных силовых полюсов переменного тока в статоре.
чем больше число полюсов, тем медленнее синхронная скорость. Соотношение между полюсами, частотой и скоростью синхронного будет следующим:
Нс (об / мин) = 120 x f / p
Нс = синхронная скорость
f = частота питания
p = количество полюсов в статоре
пример:
четырехполюсный двигатель ( 4 ) предназначен для работы при 60 Гц и синхронной скорости:
Ns = 120 x f / p
Нс = 120 х 60/4
Нс = 1800 об / мин
Электродвигатель скольженияРазница в скорости ротора и синхронной скорости известна как скольжение
мы можем рассчитать скольжение двигателя по формуле:
S = Ns — Nr / Ns x 100%
S = слип
Нс = скорость магнитного поля статора
Nr = частота вращения ротора (указана на заводской табличке двигателя)
Как рассчитать ЛОШАДЬ МОЩНОСТЬ для двигателя?Чтобы рассчитать общую выходную мощность двигателя, мы можем использовать формулу:
л.