Понятие скважности импульса и коэффициента заполнения
Общеизвестно, что регулировать количество оборотов электродвигателя можно периодическим включением и отключением его от энергосети, кроме того при изменении времени включения и отключения можно задавать дополнительные параметры скорости. Это явление характерно не только для электродвигателя – его действие можно заметить во всех потребителях тока, способных запасать энергию, иначе говоря, инерционных системах.
Скважность
Принцип широтно-импульсной модуляции основан именно на этом эффекте, он нашёл себе достаточно широкое применение при управлении электротехническими устройствами и источниками освещения, где требуется циклическая подача энергии. В английском языке этот принцип получил название – Pulse-Width Modulation.
Что такое ШИМ
Что такое электрический импульс? Это резкий конечный всплеск напряжения в системе. Поскольку он конечен, то он имеет начало, обычно называемое фронтом, ширину и спад, его окончание, период.
Такие всплески можно охарактеризовать следующими параметрами:
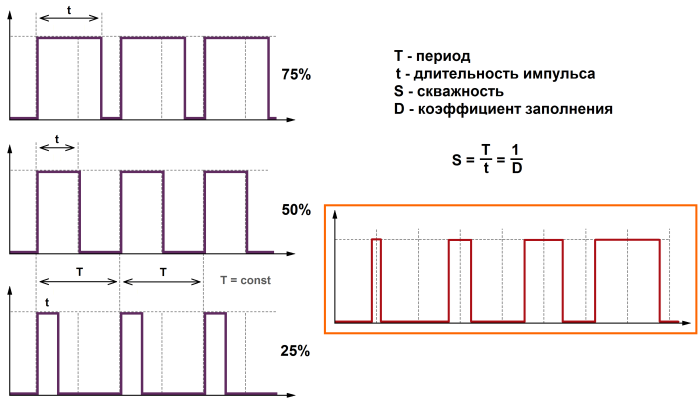
- периодичность – это временной период до фронта следующего импульса, обозначается литерой T;
- скважность – отношение периода к ширине, это величина безразмерная и выражается чаще всего в процентах, на схеме можно обозначить участок между спадом первого импульса и фронтом нового, обозначается литерой S;
- частота сигнала – количество всплесков за определённый промежуток времени, величина, обратная периоду колебаний;
- ширина импульса – период времени, в течение которого его амплитуда стабильна;
- коэффициент заполнения – значение, обратное скважности, обычно обозначается в формулах литерой t.
Таким образом, скважность импульса – это соотношение:
S = T/t.
Благодаря этому, широтно-импульсная модуляция позволяет управляемо изменять напряжение в системе от нулевого значения до максимальной амплитуды сигнала, это используется для установки оптимальных режимов работы инерциальных систем.
Схема
Применение
Для формирования прямоугольных колебаний применяется микросхема аналогового типа или чип-контроллер. Сами колебания управляют только нагрузкой, идущей от источника тока. Подключение производится через ключевую схему на полупроводнике. Ключ имеет всего два состояния: либо он включён в сеть, либо размыкает её.
Грубо говоря, все зависит от характеристик колебаний. Так, если светильник подключен через подобную схему, то при низкой частоте работы устройства лампа будет мигать с определенной периодичностью, но при превышении её сверх 50Гц в человеческих глазах отдельные всплески света сольются в одно ровное свечение. Это особенность человеческого глаза, который не улавливает колебания свыше этого значения. Но и яркость свечения можно регулировать. Чем ниже коэффициент заполнения, а, следовательно, и значение, обратное ему, тем меньше яркость свечения источника.
Аналогичный пример можно использовать и с двигателем постоянного тока, под управлением широтно-импульсного регулятора. При этом низкая частота приведёт к снижению оборотов двигателя, в то время как высокая – к его эффективной работе. Для её достижения используются ключи-полупроводники, обладающие значительным быстродействием и низким коэффициентом проводимости, так как в противном случае возможно запаздывание сигнала.
При этом низкая частота приведёт к снижению оборотов двигателя, в то время как высокая – к его эффективной работе. Для её достижения используются ключи-полупроводники, обладающие значительным быстродействием и низким коэффициентом проводимости, так как в противном случае возможно запаздывание сигнала.
При необходимости сигналы схемы импульсного регулятора можно усреднять, для этого используются фильтры низких частот, но при подключении двигателя с большой механической инерцией и хорошим значением индуктивности. В этом случае снижение амплитуды и частоты происходит самопроизвольно.
Скважность, а также её обратное значение зависят от уровня моделирующего сигнала, частота таких устройств определяется частотой дублирующего генератора, подающего дополнительный сигнал.
Генератор для получения скважности
Видео
Оцените статью:отношение периода следования к длительности импульса
Электрические сигналы, которые имеют только 2 допустимых состояния «0» или «1», что соответствует уровню напряжения 0. 2 вольта (В) или 4.9В, называются импульсными. В основном, оперируют с последовательностью импульсов. Одна из простейших последовательностей импульсов показа на рис. ниже.
2 вольта (В) или 4.9В, называются импульсными. В основном, оперируют с последовательностью импульсов. Одна из простейших последовательностей импульсов показа на рис. ниже.
Последовательность импульсов
Общая информация
К основным параметрам последовательности импульсов относятся:
- l амплитуда импульса – Um,
- l длительность импульса – tu,
- l длительность паузы – tn,
- l период следования T или частота f = 1/T следования.
Если длительность tu всех импульсов, входящих в состав последовательности, и всех пауз tn постоянна в течение времени, то она называется периодической.
Важным параметром периодического импульсного процесса является скважность импульсов S.
Эффективность S при управлении устройства достигается при стабильной частоте сигнала.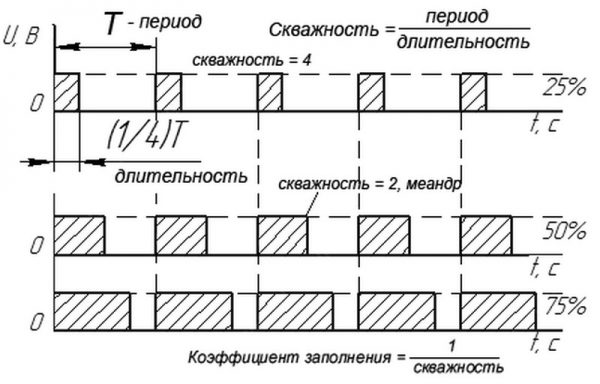 Иногда используют обратную величину D – коэффициент заполнения, рассчитывается по формуле:
Иногда используют обратную величину D – коэффициент заполнения, рассчитывается по формуле:
При равенстве tu и tn скважность равна 2, и сигнал называется меандром. S и D – безразмерные величины, так как время делится на время. В цифровых устройствах применяются импульсы различной формы. Формой импульса называется графическое изображение закона изменения импульсного напряжения во времени.
- а – прямоугольная,
- б – трапецеидальная,
- в – экспоненциальная,
- г – колокольная,
- д – ступенчатая,
- е – пилообразная.
Виды импульсных сигналов
Техническая характеристика формы импульсов связана с количественной оценкой основных параметров импульса, свойств отдельных его участков, которые играют разную роль при воздействии импульса на устройство. На рис. выше изображены идеализированные формы импульса. Из-за переходных процессов в устройствах (формирования и усиления импульсов) существует реальная форма, например, прямоугольного импульса (рис.
Реальная форма импульса
Основные параметры импульса – это:
- l Размах импульса – Um,
- l Длительность импульса – tи,
- l Длительность переднего фронта – tф,
- l Длительность заднего фронта – tсп,
- l Спад вершины – ΔU,
- l Размах выброса заднего фронта – Um обр,
- l Длительность выброса заднего фронта – tи обр.
Указанные величины считываются между уровнями 0.1 и 0.9 от амплитуды в микросекундах, в зависимости от частоты сигнала. Амплитудные – в вольтах.
Определить параметры импульсного сигнала можно с помощью осциллографа, частотомера или мультиметра.
Управление скважностью
С помощью цифровых сигналов происходит управление разнообразными устройствами. Первое применение такого управления использовалось при передаче информации кодом Морзе. Сигнал передаётся короткими и длинными импульсами. Каждой букве соответствует определённый набор точек и тире.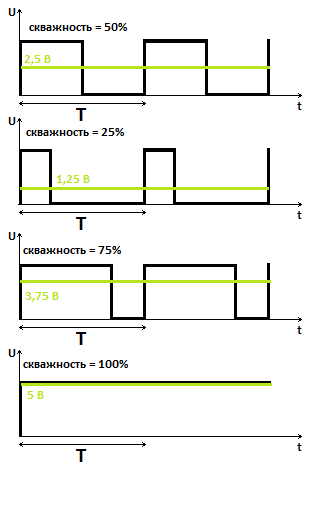 Сегодня этот метод управления используется для ШИМ-управления.
Сегодня этот метод управления используется для ШИМ-управления.
При изменении D (коэффициент заполнения) от 0 до 1 добиваются нужного напряжения на выходе электронного устройства. Таким образом, можно управлять оборотами двигателя, освещением, яркостью дисплея и т.д. При формировании прямоугольных импульсов используются специально разработанные микросхемы, например, NE555, NL494, КР1006ВИ1, IR2153, и микроконтроллеры: Arduino, AVR, SG2525A.
Для обеспечения надёжной работы управляемых устройств к параметрам импульсного сигнала предъявляются жестокие требования по их стабильности. Это достигается применением кварцевого генератора и хорошей переходной характеристикой схемы формирования управляющих импульсов.
Видео
Широтно импульсная модуляция сигналов (ШИМ)
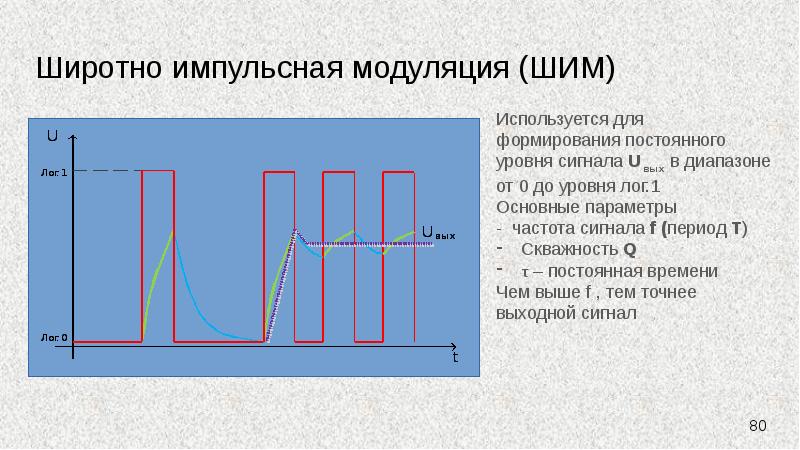
Широтно-импульсная модуляция сигналов (сокращенно ШИМ) — процесс представления сигнала в виде череды импульсов с постоянной частотой и управления уровнем этого сигнала путём изменения скважности данных импульсов
 В английском варианте ШИМ имеет название pulse-width modulation (PWM)
В английском варианте ШИМ имеет название pulse-width modulation (PWM)Определение звучит сложно, но на самом деле все очень просто. Достаточно понять, что такое скважность и среднее результирующее напряжение. Самый простой способ разобраться в понятии скважности и представить, что такое ШИМ, — это рассмотреть участок цепи, который находится под постоянным напряжением Uп, в результате чего в цепи течет постоянный ток
Рисунок 1
Из диаграммы видно, что напряжение остается постоянным во времени. Теперь представьте, что это постоянное напряжение Uп мы начинаем равномерно включать-выключать с высокой частотой, например 2000 раз в секунду. В результате получим набор импульсов рисунок 2.
Рисунок 2
Оказывается, что в этом случае набор импульсов воспринимается потребителем тока (каким либо устройством) как постоянное напряжение, но с другим (результирующим) уровнем напряжения Uрез.
После математических вычислений получим формулу: Uрез = (Uи·tи) / T ,
где Uи — напряжение импульса; tи — время длительности импульса; Т — период одного импульсного колебания (сумма времени импульса и времени паузы).
Таким образом, для случая, изображенного на рис. 2, когда продолжительность импульса равна времени паузы между импульсами (то есть Т=2·tи) , результирующее напряжение получится: Uрез = (Uи·tи)/2·tи = 0,5 Uи. Результирующее напряжение получилось в два раза меньше напряжения импульса. При этом важно отметить, что в теории выделяются такие коэффициенты, как скважность — S = T / tи и обратный ему коэффициент заполнения — D = tи / T . Он, как правило, выражается в процентах.
Он, как правило, выражается в процентах.
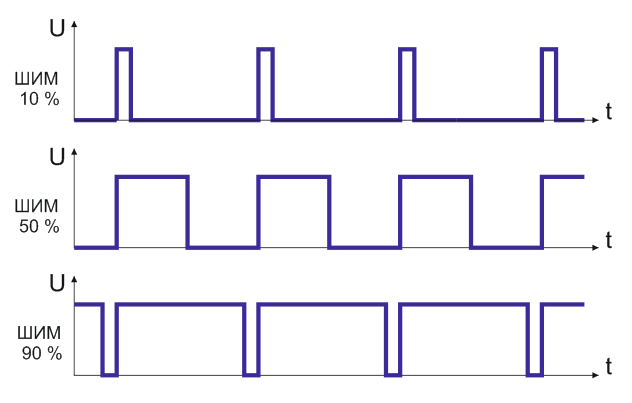
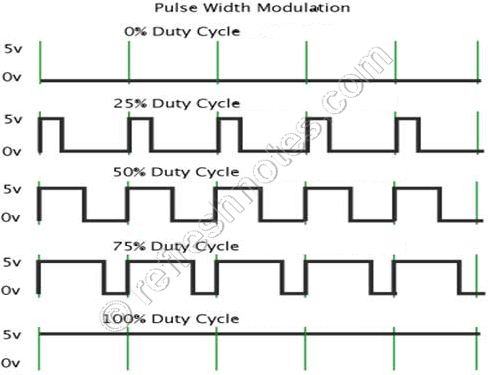
Фактически коэффициент заполнения показывает, на сколько процентов импульс заполняет весь период колебания Т. Если коэффициент заполнения D равен 1 (100%), то время импульса целиком заполняет период и фактически это постоянное напряжение. Если уменьшить коэффициент заполнения D, например, до 0,25 (25%), то длительность импульса будет всего 25% от всего периода, а результирующее напряжение будет уже в 4 раза меньше, как показано на рисунке 3.
Рисунок 3
Из всего сказанного следует и более наглядное понимание термина «Широтно-импульсная модуляция». Получается, что уровень сигнала (величина уровня напряжения) регулируется широтой импульса, т.е. сигнал модулируется посредством череды импульсов разной ширины.
Как видите, с помощью такой модуляции можно получать напряжения разных уровней. Причем в отличие от банального пропускания тока через резистор с целью уменьшения напряжения метод ШИМ гораздо экономичнее.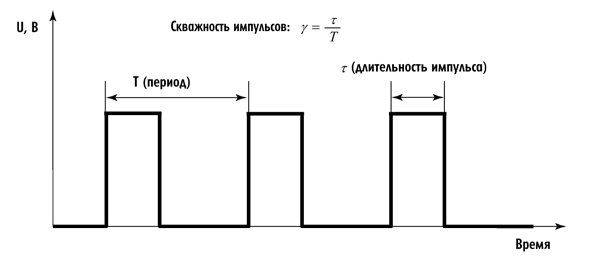 Если регулировать напряжение резистором, то на нем выделяется тепло и часть электрической энергии теряется. При ШИМ энергии теряется существенно меньше, поэтому данная модуляция активно используется в различных регуляторах напряжения и блоках питания. Принципы импульсной модуляции используются для решения многих других задач.
Если регулировать напряжение резистором, то на нем выделяется тепло и часть электрической энергии теряется. При ШИМ энергии теряется существенно меньше, поэтому данная модуляция активно используется в различных регуляторах напряжения и блоках питания. Принципы импульсной модуляции используются для решения многих других задач.
Сгенерировать собственную ШИМ, а так ж собрать различные интересные схемы с применением устройств управляемых ШИМ, вы сможете в наборах первого уровня Эвольвектор.
Что такое скважность в двигателе
На чтение 12 мин. Обновлено
Одной из важнейших величин в импульсной технике является скважность S. Скважность S характеризует прямоугольный импульс, и определяет то, во сколько раз период импульса T больше его длительности t1. Так, меандр, например, имеет скважность равную 2, поскольку длительность импульса в такой последовательности равна половине его периода: S=T/t1=2.
Как видим, и в числителе, и в знаменателе стоят продолжительности, измеряемые в секундах, поэтому скважность — величина безразмерная. Для справки напомним, что меандр — это такая импульсная последовательность, где длительность положительной части импульса t1 равна длительности его исходного состояния t0.
Величина обратная скважности называется коэффициентом заполнения D. Таким образом, теоретически скважность может изменяться от бесконечности до 1, тогда как соответствующий ей коэффициент заполнения может принимать значения от 0 до 1. Записывать величину скважности часто более удобно, чем коэффициент заполнения в виде дроби.
Например: D=0.5 – коэффициент заполнения меандра, или скважность S=2 – более удобочитаемая запись того же самого. Скважность S=10 соответствует коэффициенту заполнения D=0.1 — имеется ввиду, что продолжительность импульса в 10 раз меньше его периода (суммы его положительной и исходной частей).
Когда заходит речь о широтно-импульсной модуляции (ШИМ), то говорят, что при в драйвере происходит изменение ширины или длительности импульса, практически имеется ввиду изменение скважности при постоянной частоте. В этом контексте чем больше скважность — тем уже импульс, чем меньше скважность — тем шире импульс.
В этом контексте чем больше скважность — тем уже импульс, чем меньше скважность — тем шире импульс.Здесь и просматривается этимологическая связь с русским словом «скважина»: большая скважина (по сути — яма между импульсами в последовательности) — сам импульс выглядит как более узкий, маленькая скважина — импульсы широкие (а вот яма между ними — узкая).
В англоязычной литературе не используется термин «скважность», а используется лишь термин «duty cycle» — рабочий цикл, являющийся аналогом русскоязычного термина «коэффициент заполнения» (D), только указывается он обычно не дробью, а в процентах. Например, мы пишем D=0.5, а в англоязычной литературе можно встретить 50% duty cycle или D = 50%, когда речь идет о меандре. Или D = 30% если длительность импульса соотносится с его периодом как 30 к 100.
Давайте рассмотрим простой практический пример. Лампочка включается на одну секунду через каждые 59 секунд, затем на 59 секунд гаснет, и так все время повторяется в течение неопределенного времени.
Что это значит? Длительность импульса t1 = 1 секунда, период импульса T = 59+1 = 60 секунд. Следовательно с какой скважностью включается лампочка?
Со скважностью S = 60/1. Скважность 60. Значит коэффициент заполнения равен 1/60, то есть D = 0,01666 или duty cycle 1,66%. В данном примере отчетливо видно, что запись в терминах скважности S = 60 более удобочитаема и точна, чем запись в форме коэффициента заполнения D = 0,01666 или duty cycle 1,666%.
Наконец, еще одно полезное применение скважности. Счетчики-дешифраторы импульсов (типа К561ИЕ8) способны делить импульсную последовательность на отдельные импульсы, здесь снова значение скважности подходит лучше, оно может быть определено через разрядность счетчика и сосчитано (пропорционально количеству импульсов, подсчитанных счетчиком).
Таким образом, даже для цифровой техники оперирование напрямую скважностью импульсов часто оказывается более удобным, чем свойственным принятому в англоязычной литературе коэффициентом заполнения.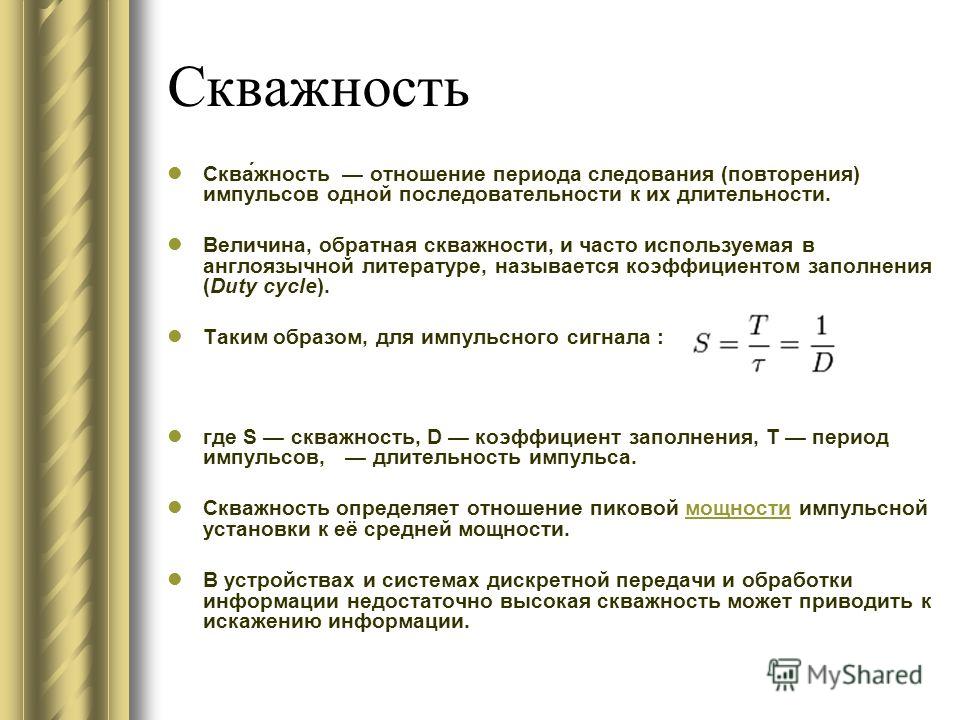
Источник
Все об скважности сигнала
Время на чтение:
Множество приборов работает с импульсными сигналами. Создаются они с помощью специальных схем-генераторов. Наиболее важная их характеристика – скважность.
Чем отличается скважность и коэффициент заполнения импульсов
Одной из наиболее важных величин в импульсной электронике – это скважность, обозначаемая латинской буквой S. Она дает характеристику импульсам прямоугольной формы и показывает, как относится их период T ко времени t1. К примеру, коэффициент меандра равен 2, поскольку время t1 в этой последовательности составляет половину периода: S = T / t1 = 2.
И в числителе, и в знаменателе находится время, выраженное в секундах. При вычислениях они сокращаются, поэтому коэффициент является величиной, не имеющей единиц измерения.
Меандр представляет собой поток импульсов, в котором отрицательные и положительные части имеют одинаковую продолжительность.
Инверсия скважности имеет название коэффициент заполнения. Следовательно, скважность способна принимать множество значений от бесконечности до единицы, а рабочий цикл этого же потока импульсов, как еще могут называть коэффициент заполнения, способен принимать значения от 0 до 1. Часто удобней записывать не данный коэффициент, измерение которого производится десятичными дробями, а скважность, которая равна, чаще всего, целому числу.
Например: D = 0,5 или S = 2 – эти две записи означают одно и то же, но вторую читать легче. Рабочий цикл S = 10 соответствует показателю D = 0,1 – это означает, что длительность импульса в 10 раз меньше его периода.
В широтно-импульсной модуляции (сокращенно, ШИМ) прибор изменяет ширину или продолжительность импульса, при этом будет соответственно изменяться и коэффициент. Частота при этом будет постоянной. В таком случае, чем больше величина, показывающая скважность, тем более узким будет импульс, и, наоборот – при минимальной скважности будет достигаться максимальная ширина.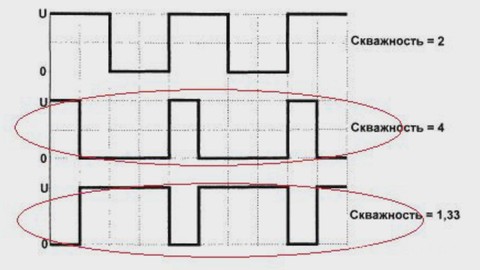
При изучении данного явления просматривается этимологическая связь с словом «скважина» из русского языка: широкая скважина (на самом деле, это промежуток между импульсами в потоке) – положительные части узкие, узкая скважина – положительные части широкие (но свободное пространство между ними мало).
Важно: У англоязычных авторов термин «скважность» не встречается вовсе, а для его замены применяют понятие «рабочий цикл» – аналогичный российскому коэффициенту заполнения (D). Однако в английской литературе он выражается не дробным числом, а процентом. Например, если D = 0,5 в западных пособиях будет указано: D = 50%.
Характеристики скважности
Коэффициент заполнения и показатель скважности зависят от уровня получаемого колебания, при этом его частота определяется параметрами генератора. Для вычисления скважности имеют наибольшее значение два основных критерия:
- Период Т.
- Длительность импульса t1.
Принцип действия
Для формирования прямоугольного колебания в устройствах-модуляторах имеется специальная микросхема-контроллер либо аналоговая микросхема.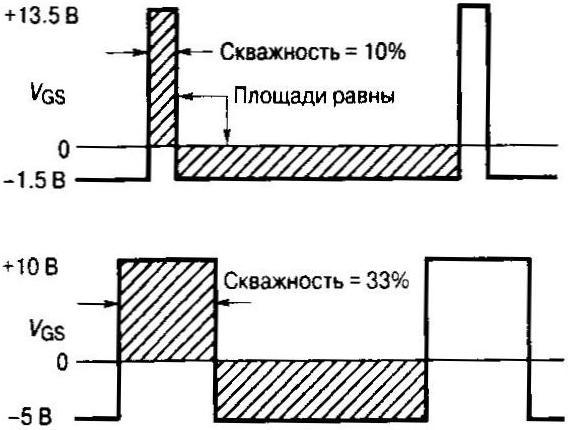 Подключение происходит посредством цепи на полупроводнике. Полупроводник имеет только два состояния:
Подключение происходит посредством цепи на полупроводнике. Полупроводник имеет только два состояния:
Важно! Работа всей цепи зависит от характера колебаний. Следовательно, если лампа подключена через полупроводниковый прибор, она начнёт мерцать с заданной частотой.
Однако, когда частота превышает 50 Гц, из-за особенностей глаз человека, мигание сливается в единое свечение. Но таким образом можно регулировать и яркость свечения. Снижение коэффициента повлечет за собой уменьшение яркости света, выдаваемой лампой.
Подобную схему можно использовать для постоянных двигателей. Уменьшение частоты провоцирует снижение скорости вращения двигателя, а высокие – к большей мощности агрегата.
В аналогичных устройствах применяется полупроводниковый переключатель, который имеет высокую скорость срабатывания и низкую проводимость, поскольку в противном случае устройство может запаздывать.
Как обозначается
Скважность обозначается английской буквой S, величина, обратная ей – коэффициент заполнения – буквой D. Данные обозначения используются и в русской, и в англоязычной литературе.
Данные обозначения используются и в русской, и в англоязычной литературе.
Формы сигналов
Сигналы различаются по форме и характеристикам:
- Синусоида. Переменный ток на выходе из дома представляет собой синусоидальную волну, которая изменяется во времени с частотой 50 Гц. Для синусоидального колебания период можно выражать не в секундах, а в градусах или в радианах. При этом, необходимо учитывать, что полный период равен 360 ° (при использовании градусной меры) или 2п (если применяется радианная мера)
Важно! Период и частота математически зависят друг от друга. По мере того, как период уменьшается, частота увеличивается, и наоборот.
Важно! Сигнал может принимать и положительные, и отрицательные значения, подвергаясь изменениям. В показанном потоке время положительного импульса больше, чем длительность отрицательного импульса, хотя бывает и наоборот.
Как измерить скважность с помощью формулы
Скважность прямоугольных импульсов S – это отношение периода T ко времени импульса, обозначаемого буквой t1. Также, стоит отметить, что рабочий цикл D – это значение обратное скважности:
Также, стоит отметить, что рабочий цикл D – это значение обратное скважности:
Скважность сигнала – одна из самых важных характеристик в импульсной технике. Ее основные характеристики – это период и время численного значения импульса. Изменяя эти характеристики, можно повлиять на всю цепь.
Источник
Скважность импульсов
Общеизвестно, что регулировать количество оборотов электродвигателя можно периодическим включением и отключением его от энергосети, кроме того при изменении времени включения и отключения можно задавать дополнительные параметры скорости. Это явление характерно не только для электродвигателя – его действие можно заметить во всех потребителях тока, способных запасать энергию, иначе говоря, инерционных системах.
Принцип широтно-импульсной модуляции основан именно на этом эффекте, он нашёл себе достаточно широкое применение при управлении электротехническими устройствами и источниками освещения, где требуется циклическая подача энергии. В английском языке этот принцип получил название – Pulse-Width Modulation.
Что такое ШИМ
Что такое электрический импульс? Это резкий конечный всплеск напряжения в системе. Поскольку он конечен, то он имеет начало, обычно называемое фронтом, ширину и спад, его окончание, период.
Такие всплески можно охарактеризовать следующими параметрами:
- периодичность – это временной период до фронта следующего импульса, обозначается литерой T;
- скважность – отношение периода к ширине, это величина безразмерная и выражается чаще всего в процентах, на схеме можно обозначить участок между спадом первого импульса и фронтом нового, обозначается литерой S;
- частота сигнала – количество всплесков за определённый промежуток времени, величина, обратная периоду колебаний;
- ширина импульса – период времени, в течение которого его амплитуда стабильна;
- коэффициент заполнения – значение, обратное скважности, обычно обозначается в формулах литерой t.

Таким образом, скважность импульса – это соотношение:
Благодаря этому, широтно-импульсная модуляция позволяет управляемо изменять напряжение в системе от нулевого значения до максимальной амплитуды сигнала, это используется для установки оптимальных режимов работы инерциальных систем.
Применение
Для формирования прямоугольных колебаний применяется микросхема аналогового типа или чип-контроллер. Сами колебания управляют только нагрузкой, идущей от источника тока. Подключение производится через ключевую схему на полупроводнике. Ключ имеет всего два состояния: либо он включён в сеть, либо размыкает её.
Грубо говоря, все зависит от характеристик колебаний. Так, если светильник подключен через подобную схему, то при низкой частоте работы устройства лампа будет мигать с определенной периодичностью, но при превышении её сверх 50Гц в человеческих глазах отдельные всплески света сольются в одно ровное свечение. Это особенность человеческого глаза, который не улавливает колебания свыше этого значения. Но и яркость свечения можно регулировать. Чем ниже коэффициент заполнения, а, следовательно, и значение, обратное ему, тем меньше яркость свечения источника.
Но и яркость свечения можно регулировать. Чем ниже коэффициент заполнения, а, следовательно, и значение, обратное ему, тем меньше яркость свечения источника.
Аналогичный пример можно использовать и с двигателем постоянного тока, под управлением широтно-импульсного регулятора. При этом низкая частота приведёт к снижению оборотов двигателя, в то время как высокая – к его эффективной работе. Для её достижения используются ключи-полупроводники, обладающие значительным быстродействием и низким коэффициентом проводимости, так как в противном случае возможно запаздывание сигнала.
При необходимости сигналы схемы импульсного регулятора можно усреднять, для этого используются фильтры низких частот, но при подключении двигателя с большой механической инерцией и хорошим значением индуктивности. В этом случае снижение амплитуды и частоты происходит самопроизвольно.
Скважность, а также её обратное значение зависят от уровня моделирующего сигнала, частота таких устройств определяется частотой дублирующего генератора, подающего дополнительный сигнал.
Генератор для получения скважности
Видео
Источник
Скважность импульсов
Электрические сигналы, которые имеют только 2 допустимых состояния «0» или «1», что соответствует уровню напряжения 0.2 вольта (В) или 4.9В, называются импульсными. В основном, оперируют с последовательностью импульсов. Одна из простейших последовательностей импульсов показа на рис. ниже.
Общая информация
К основным параметрам последовательности импульсов относятся:
- l амплитуда импульса – Um,
- l длительность импульса – tu,
- l длительность паузы – tn,
- l период следования T или частота f = 1/T следования.
Если длительность tu всех импульсов, входящих в состав последовательности, и всех пауз tn постоянна в течение времени, то она называется периодической.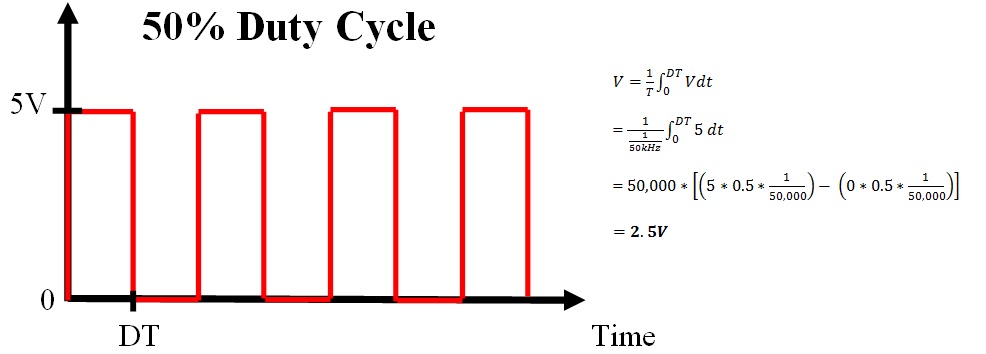
Важным параметром периодического импульсного процесса является скважность импульсов S. Скважность импульсов – это отношение периода следования к длительности импульса, рассчитывается по формуле:
Эффективность S при управлении устройства достигается при стабильной частоте сигнала. Иногда используют обратную величину D – коэффициент заполнения, рассчитывается по формуле:
При равенстве tu и tn скважность равна 2, и сигнал называется меандром. S и D – безразмерные величины, так как время делится на время. В цифровых устройствах применяются импульсы различной формы. Формой импульса называется графическое изображение закона изменения импульсного напряжения во времени. На рис. ниже показаны формы сигналов:
- а – прямоугольная,
- б – трапецеидальная,
- в – экспоненциальная,
- г – колокольная,
- д – ступенчатая,
- е – пилообразная.
Техническая характеристика формы импульсов связана с количественной оценкой основных параметров импульса, свойств отдельных его участков, которые играют разную роль при воздействии импульса на устройство. На рис. выше изображены идеализированные формы импульса. Из-за переходных процессов в устройствах (формирования и усиления импульсов) существует реальная форма, например, прямоугольного импульса (рис. ниже).
Основные параметры импульса – это:
- l Размах импульса – Um,
- l Длительность импульса – tи,
- l Длительность переднего фронта – tф,
- l Длительность заднего фронта – tсп,
- l Спад вершины – ΔU,
- l Размах выброса заднего фронта – Um обр,
- l Длительность выброса заднего фронта – tи обр.
Указанные величины считываются между уровнями 0.1 и 0.9 от амплитуды в микросекундах, в зависимости от частоты сигнала. Амплитудные – в вольтах.
Определить параметры импульсного сигнала можно с помощью осциллографа, частотомера или мультиметра.
Управление скважностью
С помощью цифровых сигналов происходит управление разнообразными устройствами. Первое применение такого управления использовалось при передаче информации кодом Морзе. Сигнал передаётся короткими и длинными импульсами. Каждой букве соответствует определённый набор точек и тире. Сегодня этот метод управления используется для ШИМ-управления.
При изменении D (коэффициент заполнения) от 0 до 1 добиваются нужного напряжения на выходе электронного устройства. Таким образом, можно управлять оборотами двигателя, освещением, яркостью дисплея и т.д. При формировании прямоугольных импульсов используются специально разработанные микросхемы, например, NE555, NL494, КР1006ВИ1, IR2153, и микроконтроллеры: Arduino, AVR, SG2525A.
Для обеспечения надёжной работы управляемых устройств к параметрам импульсного сигнала предъявляются жестокие требования по их стабильности. Это достигается применением кварцевого генератора и хорошей переходной характеристикой схемы формирования управляющих импульсов.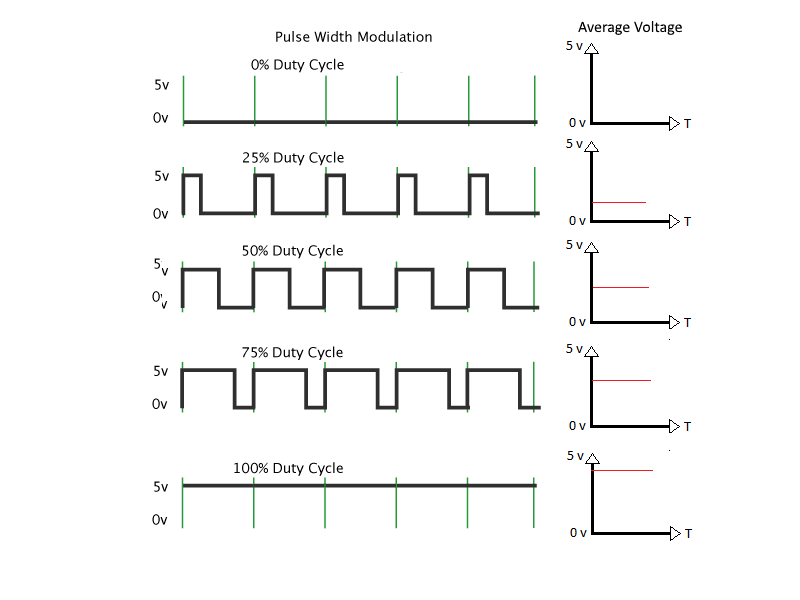
Видео
Источник
ГОСТ Р 50446-92
ГОСТ Р 50446-92
Группа Э29
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ОКП 63 4901
Дата введения 1994-01-01
1. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 22.12.92 N 1554
2. Срок первой проверки — 1999 г.
Периодичность проверки — 5 лет
3. ВВЕДЕН ВПЕРВЫЕ
4. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Настоящий стандарт распространяется на газоразрядные матричные знакосинтезирующие индикаторы переменного тока, постоянного тока, с самосканированием (далее — индикаторы) и устанавливает методы измерения:
частоты повторения:
импульсов опорного напряжения индикации,
импульсов напряжения анодов (катодов),
импульсов сканирования, циклов сканирования;
длительности импульса:
опорного напряжения индикации,
напряжения вспомогательного разряда,
напряжения записи,
напряжения стирания,
напряжения сброса,
напряжения сканирования,
напряжения индикации,
напряжения анодов;
длительности фронта импульса:
опорного напряжения индикации,
напряжения записи,
напряжения стирания,
напряжения катодов;
длительности среза импульса напряжения катодов;
длительности паузы между срезом импульса напряжения записи (стирания) и фронтом импульса опорного напряжения индикации;
времени запаздывания:
импульса напряжения записи относительно импульса напряжения вспомогательного разряда в режиме записи,
фронта импульса индикации по отношению к фронту импульса сканирования;
кадровой скважности импульсов катодного напряжения.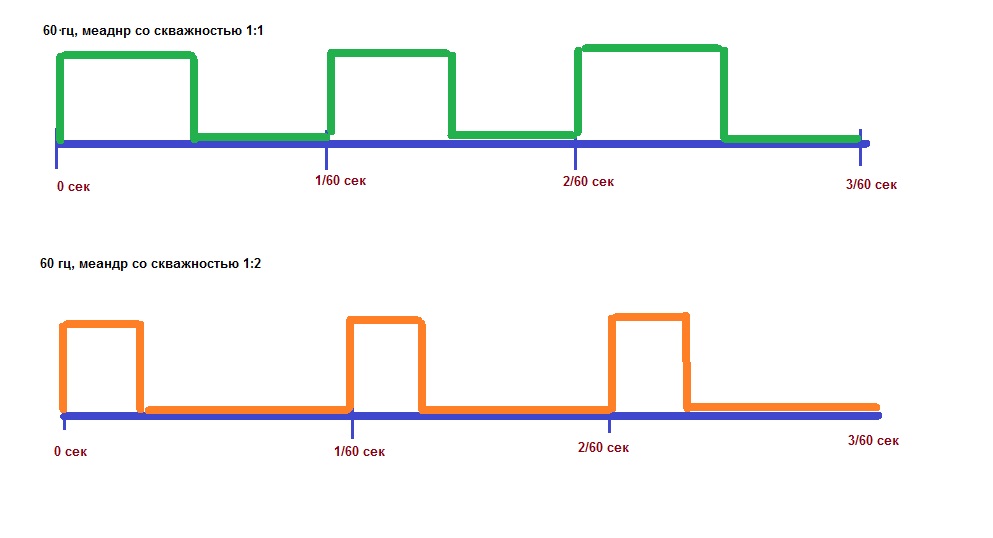
Общие требования при измерении и требования безопасности — по ГОСТ 25024.0, ГОСТ 25024.6.
Требования настоящего стандарта являются обязательными.
1. МЕТОД ИЗМЕРЕНИЯ ЧАСТОТЫ ПОВТОРЕНИЯ ИМПУЛЬСОВ
1.1. Индикаторы переменного тока
1.1.1. Аппаратура
1.1.1.1. Измерение частоты повторения импульсов опорного напряжения индикации следует проводить на установке, структурная схема которой приведена на черт.1.
1, 4, 9, 12 — стабилизированные регулируемые источники питания; 2 — генератор импульсов опорного напряжения индикации; 3, 7, 11, 14 — вольтметры; 5 — генератор импульсов напряжения записи; 6 — измеряемый индикатор; 8 — устройство управления и синхронизации; 10 — генератор импульсов напряжения стирания; 13 — генератор импульсов напряжения вспомогательного разряда; 15 — осциллограф
Черт.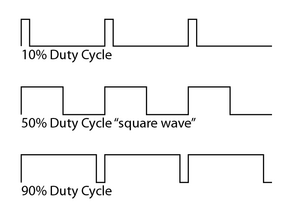 1
1
1.1.1.2. Основная погрешность вольтметра 0,2%. Осциллограф с погрешностью измерения в пределах не более ±5% или ±3% в зависимости от требуемой точности измерения.
1.1.1.3. Осциллограф следует подключать непосредственно к электродам индикатора.
1.2. Индикаторы постоянного тока
1.2.1. Аппаратура
1.2.1.1. Измерение частоты повторения импульсов напряжения анодов (катодов) следует проводить на установке, структурная схема которой приведена на черт.2.
1 — источник питания генератора импульсов напряжения катодов; 2 — генератор импульсов напряжения катодов; 3, 8 — вольтметры; 4 — устройство управления и синхронизации; 5 — измеряемый индикатор; 6 — источник питания генератора импульсов напряжения анодов; 7 — генератор импульсов напряжения анодов; 9 — осциллограф
Черт. 2
2
1.2.1.2. Требования к вольтметру и осциллографу — по п.1.1.1.2.
1.3. Индикаторы с самосканированием
1.3.1. Аппаратура
1.3.1.1. Измерение частоты повторения импульсов сканирования и циклов сканирования следует проводить на установке, структурная схема которой приведена на черт.3.
1 — источник питания напряжения смещения анодов индикации; 2, 5, 10, 12 — вольтметры; 3, 7 — источники питания постоянного напряжения; 4 — генератор импульсов напряжения индикации; 6 — устройство управления и синхронизации; 8 — генератор импульсов напряжения сканирования; 9 — измеряемый индикатор; 11 — источник питания напряжения анодов сканирования; 13 — осциллограф
Черт.3
1.3.1.2. Требования к вольтметру и осциллографу — по п. 1.1.1.2.
1.1.1.2.
1.4. Проведение измерений
1.4.1. На электроды индикатора в порядке, указанном в ТУ на индикаторы конкретных типов, подают импульсные напряжения до возникновения свечения во всех элементах отображения.
1.4.2. Длительность развертки осциллографа устанавливают таким образом, чтобы на экране получить устойчивое изображение не менее двух импульсов, частоту повторения которых необходимо определить.
1.5. Обработка результатов
1.5.1. Частоту повторения импульсов () определяют по формуле
, (1)
где — период повторения импульсов.
1.6. Показатели точности измерений
1.6.1. Погрешность измерения частоты повторения импульсов с установленной вероятностью 0,95:
±6,5% — при измерении осциллографом с погрешностью ±5%;
±4% — при измерении осциллографом с погрешностью ±3%.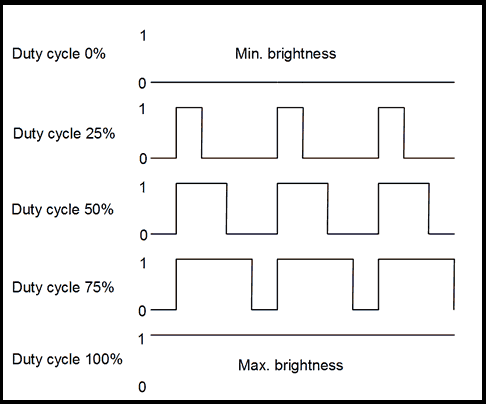
Формула расчета погрешности приведена в приложении.
2. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ ИМПУЛЬСА
2.1. Длительность импульса напряжения определяют как интервал времени, в течение которого значение импульса превышает 0,5 амплитудного значения.
2.2. Аппаратура
2.2.1. Аппаратура — по п.1.1.1.
2.3. Проведение измерений
2.3.1. Длительность развертки осциллографа выбирают таким образом, чтобы на осциллограмме получить максимальную длительность импульса.
Определяют уровень 0,5 амплитудного значения и по осциллограмме измеряют длительность импульса. Вид осциллограммы прямоугольного импульса приведен на черт.4.
— амплитуда прямоугольного импульса;
— длительность прямоугольного импульса;
— длительность фронта прямоугольного импульса;
— длительность среза прямоугольного импульса.
Черт.4
Примечание. Значение параметра находят путем продления плоской части вершины до пересечения с фронтом импульса.
2.4. Показатели точности измерений
2.4.1. Погрешность измерения длительности импульса с установленной вероятностью 0,95:
±6,5% — при измерении осциллографом с погрешностью ±5%;
±4% — при измерении осциллографом с погрешностью ±3%.
Формула расчета погрешности приведена в приложении.
3. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ ФРОНТА ИМПУЛЬСА
3.1. Длительность фронта импульса определяют как время нарастания амплитуды импульса от уровня 0,1 до уровня 0,9.
3.2. Аппаратура
3.2.1. Аппаратура — по п.1.1.1.
3.3. Проведение измерений
3.3.1. Длительность развертки осциллографа выбирают таким образом, чтобы на осциллограмме получить максимальную длительность фронта импульса.
Определяют уровни 0,1 и 0,9 амплитудного значения и измеряют по осциллограмме (черт.4) длительность фронта импульса ().
3.4. Показатели точности измерений
3.4.1. Погрешность измерения длительности фронта импульса с установленной вероятностью 0,95:
±7% — при измерении осциллографом с погрешностью ±5%;
±4,5% — при измерении осциллографом с погрешностью ±3%.
Формула расчета погрешности приведена в приложении.
4. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ СРЕЗА ИМПУЛЬСА НАПРЯЖЕНИЯ
4.1. Длительность среза импульса определяют как время спада амплитуды импульса на срезе от уровня 0,9 до уровня 0,1.
4.2. Аппаратура
4.2.1. Аппаратура — по п.1.2.1.
4.3. Проведение измерений
4.3.1. Длительность развертки осциллографа выбирают таким образом, чтобы на осциллограмме получить максимальную длительность среза импульса.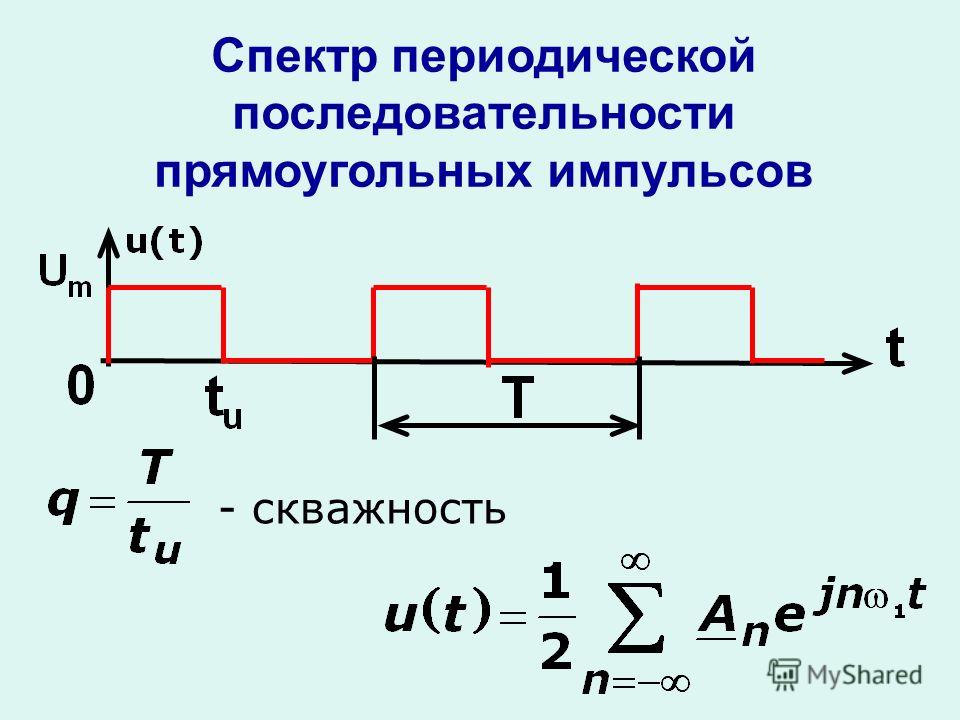
Определяют уровни 0,9 и 0,1 амплитудного значения и измеряют по осциллограмме (черт.4) длительность среза импульса ().
4.4. Показатели точности измерений
4.4.1. Погрешность измерения длительности среза импульса с установленной вероятностью 0,95:
±7% — при измерении осциллографом с погрешностью ±5%;
±4,5% — при измерении осциллографом с погрешностью ±3%.
Формула расчета погрешности приведена в приложении.
5. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ ПАУЗЫ
5.1. Длительность паузы определяют как интервал времени между срезом импульса напряжения записи (стирания) и фронтом импульса опорного напряжения индикации в течение которого значение каждого импульса не превышает уровня, равного половине амплитудного значения.
5.2. Аппаратура
5.2.1. Аппаратура — по п.1.1.1.
5.3. Проведение измерений
5. 3.1. Длительность развертки осциллографа устанавливают таким образом, чтобы на экране получить устойчивое изображение импульсов, паузу между которыми необходимо определить.
3.1. Длительность развертки осциллографа устанавливают таким образом, чтобы на экране получить устойчивое изображение импульсов, паузу между которыми необходимо определить.
По осциллограмме, изображенной на черт.5, определяют уровень 0,5 амплитудного значения каждого импульса и измеряют длительность паузы ().
Черт.5
5.4. Показатели точности измерений
5.4.1. Погрешность измерения длительности паузы с установленной вероятностью 0,95:
±7% — при измерении осциллографом с погрешностью ±5%;
±4,5% — при измерении осциллографом с погрешностью ±3%.
Формула расчета погрешности приведена в приложении.
6. МЕТОД ИЗМЕРЕНИЯ ВРЕМЕНИ ЗАПАЗДЫВАНИЯ ИМПУЛЬСОВ
6.1. Время запаздывания определяется как интервал между моментами первого достижения каждым импульсом уровня, равного половине амплитудного значения.
6. 2. Аппаратура
2. Аппаратура
6.2.1. Аппаратура — по п.1.1.1 для индикаторов переменного тока, по п.1.3.1 — для индикаторов с самосканированием.
6.3. Проведение измерений
6.3.1. Время запаздывания определяют при одновременной подаче импульсов на разные входы осциллографа. Длительность развертки устанавливают таким образом, чтобы на экране получить устойчивое изображение импульсов. Время запаздывания () определяют с момента достижения импульсом уровня 0,5 амплитудного значения, до момента, соответствующего уровню 0,5 амплитудного значения запаздывающего импульса (черт.5).
6.4. Показатели точности измерений
6.4.1. Погрешность измерения времени запаздывания с установленной вероятностью 0,95:
±7% — при измерении осциллографом с погрешностью ±5%;
±4,5% — при измерении осциллографом с погрешностью ±3%.
Формула расчета погрешности приведена в приложении.
7. МЕТОД ИЗМЕРЕНИЯ КАДРОВОЙ СКВАЖНОСТИ ИМПУЛЬСОВ
7.1. Аппаратура
7.1.1. Аппаратура — по п.1.2.1.
7.2. Проведение измерений
7.2.1. На осциллограмме импульса катодного напряжения измеряют период повторения импульсов и длительность импульса на уровне 0,5 амплитудного значения.
7.3. Обработка результатов
7.3.1. Скважность () рассчитывают по формуле
, (2)
где — период повторения импульсов, с;
— длительность импульса, с.
7.4. Показатели точности измерений
7.4.1. Погрешность измерения кадровой скважности импульсов катодного напряжения с установленной вероятностью 0,95:
±9% — при измерении осциллографом с погрешностью ±5%;
±6% — при измерении осциллографом с погрешностью ±3%.
Формула расчета погрешности приведена в приложении.
ПРИЛОЖЕНИЕ (справочное). РАСЧЕТ ПОКАЗАТЕЛЕЙ ТОЧНОСТИ ИЗМЕРЕНИЙ
ПРИЛОЖЕНИЕ
Справочное
1. Метод измерения частоты повторения импульсов
1.1. Интервал, в котором с установленной вероятностью находится погрешность измерения частоты повторения импульсов, рассчитывают по формуле
, (3)
где — коэффициент, зависящий от закона распределения погрешности измерения и установленной вероятности. Для нормального закона и установленной вероятности 0,95 ;
— предел основной погрешности осциллографа;
— предел дополнительной погрешности осциллографа;
, — предельный коэффициент, характеризующий закон распределения частной погрешности. Для равномерного закона .
1.2. Погрешность измерения частоты повторения импульсов с вероятностью 0,95:
. (4)
При измерении частоты повторения импульсов осциллографом с погрешностью, измерения ±5%
%.
При измерении частоты повторения импульсов осциллографом с погрешностью измерения ±3%
%.
.
2. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ ИМПУЛЬСА
2.1. Интервал, в котором с установленной вероятностью находится погрешность измерения длительности импульса, рассчитывают по формуле
, (5)
где , , , , — по п.1.1;
— предел частной погрешности, обусловленной неточностью определения уровня 0,5 амплитудного значения, ±1%;
— предельный коэффициент, характеризующий закон распределения частной погрешности. Для равномерного закона .
2.2. Погрешность измерения длительности импульса с вероятностью 0,95:
. (6)
При измерении длительности импульса осциллографом с погрешностью измерения ±5%
±6,42%.
При измерении длительности импульса осциллографом с погрешностью измерения ±3%
±3,96%.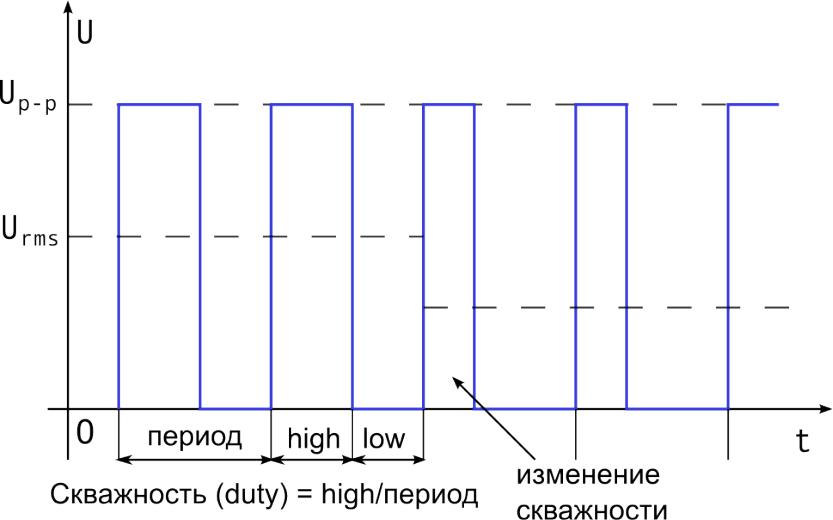
3. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ ФРОНТА (СРЕЗА) ИМПУЛЬСА
3.1. Интервал, в котором с установленной вероятностью находится погрешность измерения длительности фронта (среза) импульса, рассчитывают по формуле
, (7)
где , , , , — по п.1.1;
, — предел частной погрешности, обусловленный неточностью определения уровня 0,1 и 0,9 амплитуды ±1%;
, — предельный коэффициент, характеризующий закон распределения частной погрешности. Для равномерного закона .
3.2. Погрешность измерения длительности фронта (среза) импульса с вероятностью 0,95:
. (8)
При измерении длительности фронта (среза) импульса осциллографом с погрешностью измерения ±5%
±6,52%.
При измерении длительности фронта (среза) импульса осциллографом с погрешностью измерения ±3%
±4,13%.
4. МЕТОД ИЗМЕРЕНИЯ ДЛИТЕЛЬНОСТИ ПАУЗЫ (ВРЕМЕНИ ЗАПАЗДЫВАНИЯ)
4.1. Интервал, в котором с установленной вероятностью находится погрешность измерения длительности паузы (времени запаздывания), рассчитывают по формуле
, (9)
где , , , , — по п.1.1;
, — предел частной погрешности, обусловленной неточностью определения уровня 0,5 амплитудного значения каждого импульса, ±1%;
, — предельный коэффициент, характеризующий закон распределения частной погрешности. Для равномерного закона .
4.2. Погрешность измерения длительности паузы (времени запаздывания) с вероятностью 0,95:
. (10)
При измерении длительности паузы (времени запаздывания) осциллографом с погрешностью измерения ±5%
±6,52%.
При измерении длительности паузы (времени задержки) осциллографом с погрешностью измерения ±3%
±4,13%.
5. МЕТОД ИЗМЕРЕНИЯ КАДРОВОЙ СКВАЖНОСТИ ИМПУЛЬСОВ
5.1. Интервал, в котором с установленной вероятностью находится погрешность измерения кадровой скважности импульсов, рассчитывают по формуле
, (11)
где , , , , — по п.1.1;
, — по п.2.1.
Предел основной и дополнительной погрешностей осциллографа и учитывают дважды, т.к. измеряют период и длительность импульса.
5.2. Погрешность измерения кадровой скважности импульсов с вероятностью 0,95:
. (12)
При измерении кадровой скважности импульсов осциллографом с погрешностью ±5%
±8,98%.
При измерении кадровой скважности импульсов осциллографом с погрешностью ±3%
±5,48%.
Электронный текст документа
подготовлен ЗАО «Кодекс» и сверен по:
официальное издание
М. : Издательство стандартов, 1993
: Издательство стандартов, 1993
Измерение фазовых шумов ИМ сигналов с большой скважностью.
Существуют задачи, когда измерения фазового шума в импульсном режиме нужно провести с ИМ сигналом большой скважности, например 800-1000-5000 или задача сводится к детектированию и измерению фазового шума одиночного импульса. В обычных режимах с помощью кросс-корреляций и петли ФАПЧ можно проводить измерения с величиной скважности в 500 в некоторых параметрах, но чаще скважность ограничена величиной в 100.
Анализаторы фазовых шумов AnaPico PNA7, PNA20, PNA40 могут проводить измерения пачки импульсов, одиночного импульса, сигналов частотной развертки благодаря опции BURST. Как работает эта опция?
Есть несколько технологий измерения фазовых шумов, использование системы ФАПЧ и есть решения на основе оцифровки с последующей IQ обработкой. У цифровой обработки если преимущества в запуске и в обработке импульсных сигналов у системы ФАПЧ преимущество по измерению вносимых фазовых шумов и лучше чувствительность в ближней зоне. Особенность решения анализаторов фазовых шумов AnaPico это объединения технологий петли ФАПЧ и IQ обработке, таким образом пользователь получает выдающуюся чувствительность измерения в ближней зоне и возможность гибкой обработки сигналов.
Особенность решения анализаторов фазовых шумов AnaPico это объединения технологий петли ФАПЧ и IQ обработке, таким образом пользователь получает выдающуюся чувствительность измерения в ближней зоне и возможность гибкой обработки сигналов.
Рисунок 1: Упрощенная принципиальная схема работы анализаторов фазовых шумов AnaPico
Процесс измерения фазового шума сигналов сложной формы:
- Выделение модулирующего сигнала
*В зависимости от стабильности частоты и типе сигнала:Двойное преобразование вниз в НЧ или около 0 ПЧ
*Прямая ЦОС и IQ демодуляция- Пункт 4 из списка!
2. Модулирующий сигнал фильтруется, оцифровывается, усиливается.
3. Цифровая обработка сигналов на ПЛИС, фильтрация, снижение ЧД, БПФ, IQ демодуляция
4. Кросс-корреляция удаляет шумы каналов приемника
5. GUI отображает сигнал
Таким образом у пользователя нет ограничений, он может измерить
фазовый шум в ближней зоне, а также проводить измерения пачек импульсов или импульсной
последовательности с большой скважностью.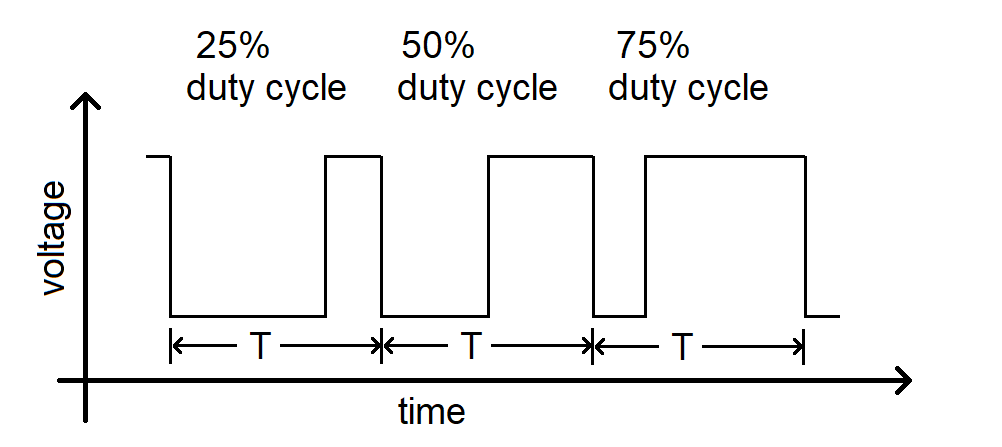 В видео ниже пользователь нажатием
нескольких кнопок измерил фазовый шум ИМ сигнала длительностью 10 мкс и 20 мкс
с периодом 5000 мкс.
В видео ниже пользователь нажатием
нескольких кнопок измерил фазовый шум ИМ сигнала длительностью 10 мкс и 20 мкс
с периодом 5000 мкс.
Рассмотрим элементы интерфейс пользователя в момент измерения.
Рисунок 2: Скриншот измерения фазового шума ИМ с большой скважностью.
Цифровая обработка сигналов позволяет включить временную шкалу,
по вертикальной оси отложено значение диапазона частот, по горизонтальной оси
время. В случае детектирования сигнала несущая сигнала внутри импульса появляется
красной линией на графике. Так с помощью триггера был отображен ИМ сигнал длительностью
10 мкс и частотой, несущей 10 ГГц Рисунок 3.
Рисунок 3: Захват импульса с частотным заполнением во временной области.
Рисунок 4: Параметры временной области и системы запуска
Временной интервал: устанавливается пользователем, определяет ширину развертки.
Разрешение по времени: устанавливается пользователем, регулирует частоту дискретизации в ЦОС
Широкая полоса. Диапазон частот- пользователь выбирает полосу сигнала, в котором находится интересующий сигнал.
Narrow Band. Центральная частота— устанавливается значение нужно частоты, на которой будет установлен триггер.
Запуск:
Источник— тип запуска: Широколистный, Узкополосный, Внешний запуск.
Повтор: выбирается условие срабатывания по запуску, непрерывный запуск, однократный запуск, свободный запуск.
Тип: Выбор запуска, доступны варианты с положительным и отрицательным наклоном.
Заключение:
Анализаторы фазовых шумов AnaPico используя опцию BURST могут измерять фазовый шум одиночных импульсов, пачек импульсов и даже сигналов частотной развертки. Комбинирую прямую цифровую обработку Удобный пользовательский интерфейс
В данном обзоре были отражены возможности анализаторов фазового шума AnaPico.
- Номер в ГРСИ РФ: 68540-17
- Производитель / заявитель: Компания «Anapico Ltd.», Швейцария
Анализаторы фазовых шумов PNA7, PNA20, PNA40 — предназначены для измерения фазовых и амплитудных шумов в импульсном режиме, исследование вносимых фазовых шумов измерения параметров ГУН и девиации Аллана.
Рисунок 3: Типовые технические характеристик чувствительности к измерению фазовых шумИнформация для заказа
Оборудование AnaPico за счет использования передовых инженерных технологий и оптимизации производства выгодно отличается по цене чем аналоги класса, преимущество в цене оборудования AnaPico может доходить до 40%.
Компания AnaPico полностью клиенториентирована, поэтому специалисты AnaPico могут разработать интерфейс пользователя под ваши задачи, автоматизировать нужные измерения, разработать техническое решение под вашу задачу. Свяжитесь с нами!
Вы можете запросить цены на Анализаторы фазовых шумов AnaPico по адресу:
[email protected]
Вы может запросить демонстрацию оборудования, получить техническую консультацию по адресу:
[email protected]
Контакты для связи с представительством AnaPico в РФ и дистрибуторами AnaPico
https://anapico-russia.com/anapico-contact/
Генераторы импульсов на цифровых КМОП микросхемах
Так, товарищи! Заканчиваем банкет, убираем рыбные закуски.
Не забываем, что на сегодняшнем мероприятии, посвящённом Дню пивовара России, мы обсуждаем наболевшее:
«Исследование разнообразных схемотехнических построений и характеристик генераторов на ИМС структуры КМОП».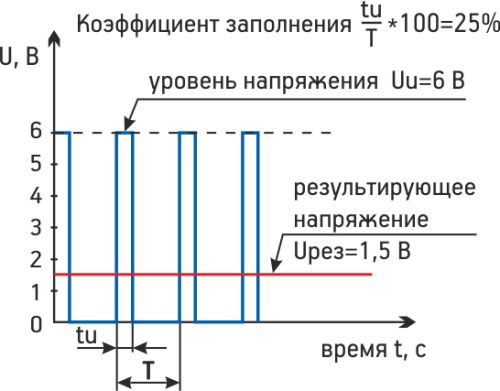
Развиваем сюжетную линию, плавно переходим к генераторам прямоугольных импульсов с несимметричной формой сигнала, а также генераторам с изменяемой скважностью выходных импульсов.
Для начала определимся — для чего, собственно, когда и с чем потреблять само понятие «скважность импульсного сигнала»?
Тут как нельзя всё просто: Скважность = Т/tи, где
Т-полный период колебаний,
tи — длительность импульса,
tп — длительность паузы.
При величине скважности, равной 2, импульсный сигнал имеет симметричную форму (меандр), во всех остальных случаях —
несимметричную (не меандр).
Рис.1
Теперь также плавно, без рывков и резких падений, переходим с схемотехническим изыскам.
Отличие несимметричных генераторов от устройств, описанных на предыдущей странице, как правило, сводится к утяжелению
схемы дополнительным резистором и парой диодов для разделения цепей заряда конденсатора разнополярными токами.
|
Рис.2 |
F = 0,77/((R1+R2)×C1)) Схема обладает весомым параметром потребления тока. |
|
Рис.3 |
F = 0,86/((R1+R2)×C1)) |
|
Рис.4 |
В случае необходимости получить плавную регулировку скважности при неизменной частоте имеет смысл обратить внимание на схему, приведённую
на Рис.4. |
|
Рис.5 |
F = 0,86/((2*R1+R2)×C1)) |
 3).
3). 5).
5).
Формулы для расчёта частоты рассматриваемых генераторов соответствуют напряжению питания 5В и температуре окружающей среды 25°С.
Все представленные схемы могут быть реализованы на элементах И—НЕ, ИЛИ—НЕ, триггерах Шмитта, или инверторах.
Идём дальше к таблице для расчёта номиналов элементов генераторов, исходя из заданной частоты генерации и скважности выходных импульсов.
ТАБЛИЦА РАСЧЁТА НОМИНАЛОВ ЭЛЕМЕНТОВ ГЕНЕРАТОРОВ НА КМОП МИКРОСХЕМАХ БЕЗ ПЛАВНОЙ РЕГУЛИРОВКИ СКВАЖНОСТИ.
Бросив беглый взгляд на Рис.1, легко заметить, что значение скважности импульсов должно быть больше 1.
Теоретически величины сопротивлений резисторов R1 и R2 должны быть не менее 1кОм, однако на практике,
для минимизации влияния выходного сопротивления микросхемы на частоту сигнала, рекомендуется выбирать значения сопротивления
этих резисторов — не менее 10кОм. Поэтому послеживайте за рассчитанным значением R2, если оно не вписывается в нужный диапазон —
повышайте номинал R1.
Поэтому послеживайте за рассчитанным значением R2, если оно не вписывается в нужный диапазон —
повышайте номинал R1.
И под занавес —
ТАБЛИЦА РАСЧЁТА НОМИНАЛОВ ЭЛЕМЕНТОВ ГЕНЕРАТОРОВ НА КМОП МИКРОСХЕМАХ C ПЛАВНОЙ РЕГУЛИРОВКОЙ СКВАЖНОСТИ.
R1 — не менее 1кОм, желательно — не менее 10кОм.
Пределы изменения длительности импульса — больше 1.
Что такое рабочий цикл? | Fluke
Рабочий цикл — это отношение времени, в течение которого нагрузка или цепь находится во включенном состоянии, и времени, в течение которого нагрузка или цепь выключены.
Рабочий цикл, иногда называемый «коэффициентом заполнения», выражается в процентах от времени включения. Рабочий цикл 60% — это сигнал, который включен 60% времени и выключен в остальных 40%.
Многие нагрузки быстро включаются и выключаются быстродействующим электронным переключателем, который точно регулирует выходную мощность нагрузки. Работа под нагрузкой — например, яркость лампы, мощность нагревательного элемента и магнитная сила катушки — может регулироваться рабочим циклом с помощью периодов времени включения и выключения или циклов в секунду.
Работа под нагрузкой — например, яркость лампы, мощность нагревательного элемента и магнитная сила катушки — может регулироваться рабочим циклом с помощью периодов времени включения и выключения или циклов в секунду.
Рабочий цикл упрощен
Если на клапан подается импульсное включение с переменной продолжительностью (так называемая широтно-импульсная модуляция), рабочий цикл изменяется. Если он включен в течение 0,05 секунды в 0,1-секундном цикле, рабочий цикл топливной форсунки равен 50%. Если он включился в течение 0,09 секунды того же 0,1-секундного цикла, рабочий цикл топливной форсунки равен 90%.
Пример рабочего цикла
В автомобильной электронной системе впрыска топлива импульсы напряжения, подаваемые на соленоид клапана топливной форсунки, управляют клапаном топливной форсунки с фиксированной скоростью 10 циклов в секунду или 10 Гц.
Широтно-импульсная модуляция позволяет точно управлять топливом, подаваемым в двигатель, с помощью электроники. Среднее значение напряжения для каждого рабочего цикла определяется длительностью включения импульса.
Среднее значение напряжения для каждого рабочего цикла определяется длительностью включения импульса.
Соленоиды с рабочим циклом используют сигнал переменного рабочего цикла для изменения расхода или регулировки давления. Чем дольше соленоид остается открытым, тем больше создается поток и меньше давление. Эти соленоиды управляются либо подачей, либо с земли.
Что такое ширина импульса?
Ширина импульса — это фактическое время включения, измеряемое в миллисекундах.Время выключения не влияет на ширину импульса сигнала. Единственное измеряемое значение — это то, как долго сигнал находится в состоянии ВКЛ (с наземным управлением).
Ссылка: Принципы цифрового мультиметра Глена А. Мазура, American Technical Publishers.
Рабочий цикл — обзор
4 Выводы
Рабочий цикл PHEV полного разряда на ежедневной основе в течение 10–15 лет в автомобильной среде может быть одной из самых сложных проблем, связанных с эксплуатацией аккумуляторных батарей. Как цикличность, так и календарное старение влияют на скорость уменьшения мощности и емкости батареи. Была разработана модель для оценки комбинированных воздействий цикличности и календарного старения, включая время, проведенное при высоком SOC, время, проведенное при высокой температуре, а также глубину разряда и частоту езды на велосипеде.
Как цикличность, так и календарное старение влияют на скорость уменьшения мощности и емкости батареи. Была разработана модель для оценки комбинированных воздействий цикличности и календарного старения, включая время, проведенное при высоком SOC, время, проведенное при высокой температуре, а также глубину разряда и частоту езды на велосипеде.
Батареи составляют значительную часть начальной стоимости PHEV. Ожидается, что долгосрочная стоимость производства PHEV-20 будет примерно на 3000 долларов меньше, чем у PHEV-40, из-за меньшего размера батареи.Хотя может показаться, что PHEV-20 имеет меньший потенциал вытеснения нефти из-за его меньшего электрического диапазона, подзарядка между поездками может позволить более эффективно использовать его меньшую батарею. Моделирование транспортных средств для 227 различных реальных профилей вождения показывает, что PHEV-20, заряжаемый при каждой возможности, может вытеснить на 5% больше топлива, чем PHEV-40, который заряжается только один раз за ночь. Однако этот сценарий возможной зарядки PHEV-20 приводит к более частым циклам глубокой разрядки батареи по сравнению со сценарием ночной зарядки PHEV-40, и можно ожидать, что батарея PHEV-20 будет разряжаться более быстрыми темпами.
Однако этот сценарий возможной зарядки PHEV-20 приводит к более частым циклам глубокой разрядки батареи по сравнению со сценарием ночной зарядки PHEV-40, и можно ожидать, что батарея PHEV-20 будет разряжаться более быстрыми темпами.
Моделирование старения аккумуляторной батареи для сценариев возможной зарядки PHEV-20 и ночной зарядки PHEV-40 для 227 ездовых циклов иллюстрирует большое разнообразие возможных результатов, в зависимости от того, каким образом аккумулятор циклически перезаряжается и хранится. При более жесткой езде на велосипеде 25% смоделированного парка автомобилей с возможностью зарядки PHEV-20 испытывают значительно большую деградацию, чем парк автомобилей с ночной зарядкой, после 15 лет езды на велосипеде при 30 ° C (химия NCA). В некоторых ситуациях езда на велосипеде может уменьшить деградацию за счет сокращения времени, проведенного при высоком SOC; однако этот эффект обычно невелик по сравнению с кумулятивным стрессом от нескольких циклов глубокой разрядки в день. В зависимости от того, как используется аккумулятор, возможны результаты деградации, в которой преобладает как хранение, так и циклическая нагрузка.
В зависимости от того, как используется аккумулятор, возможны результаты деградации, в которой преобладает как хранение, так и циклическая нагрузка.
Сварочные аппараты — Что такое рабочий цикл и как он рассчитывается?
Что такое рабочий цикл?Рабочий цикл — это процент времени, в течение которого машина будет безопасно работать (или сваривать) в течение определенного периода времени при заданной силе тока.Например, многофункциональный сварочный аппарат Weldforce WF-205MST имеет рабочий цикл 200 А при 30%. Это означает, что он будет работать при 200 А в течение 3 минут в течение 10 минут. В течение оставшихся 7 минут машина переключится на тепловую перегрузку для охлаждения.
Все сварочные аппараты оснащены (или должны быть) оснащены защитой от тепловой перегрузки, что означает, что аппарат отключается, когда внутренние критически важные компоненты достигают определенной температуры, чтобы предотвратить повреждение. Затем машина перезапустится, когда она вернется к безопасной температуре.
Затем машина перезапустится, когда она вернется к безопасной температуре.
Рабочий цикл будет меняться при разной силе тока. При более высокой выходной силе тока машина будет нагреваться быстрее, и рабочий цикл уменьшится. При более низких значениях тока рабочий цикл увеличивается.
Например — если мы снова посмотрим на машину WF-205MST;
Рабочий цикл при 200 А = 30%
Рабочий цикл при 145 А = 60%
Рабочий цикл при 110 А = 100%
Как рассчитывается и тестируется рабочий цикл?
Хотя основная формула всегда одна и та же (% времени включения в течение периода тестирования), существует несколько переменных, которые могут повлиять на результат теста рабочего цикла, в том числе:
- Период времени, в течение которого он измеряется (обычно 5 или 10 минут — 10-минутный период более требователен).
- Температура окружающей среды, при которой проводился тест (более высокая температура окружающей среды требует более высоких требований).
- Был ли тест проведен на «свежей», холодной машине или на машине, которая уже была нагрета от длительного использования. (Очевидно, что тестирование уже нагретой машины требует гораздо больших усилий с ее системой охлаждения.)

Наиболее широко принятым стандартом для тестирования и определения значений рабочего цикла является европейский стандарт EN60974-1, на котором основан австралийский стандарт AS60974-1.Этот стандарт очень требователен и поэтому считается лучшим показателем того, как машина будет работать в «реальных» условиях. Все машины Weldforce от Weldclass протестированы на соответствие этому стандарту.
Снова возьмем пример Weldforce WF-205MST с номинальным рабочим циклом 200 А при 30%. Чтобы достичь этого рейтинга в соответствии со стандартом EN60974-1, сначала машина была «разогрета» перед испытанием путем непрерывной сварки, чтобы заставить ее отключиться при тепловой перегрузке как минимум дважды.Затем он был протестирован в контролируемой камере, нагретой до 40 ◦ C.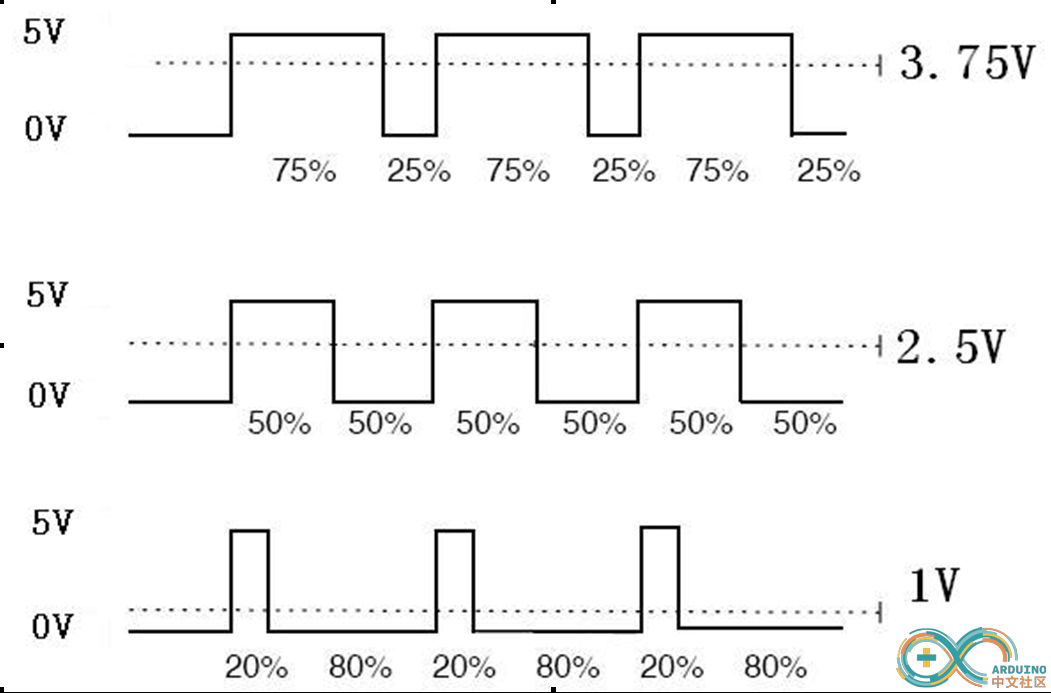 В течение 10 минут он был способен сваривать при 200 А (что на этой машине является максимальной мощностью) в общей сложности 3 минуты … следовательно, номинальный рабочий цикл 200 А при 30%.
В течение 10 минут он был способен сваривать при 200 А (что на этой машине является максимальной мощностью) в общей сложности 3 минуты … следовательно, номинальный рабочий цикл 200 А при 30%.
Испытываются ли все сварочные аппараты на рабочий цикл одинаково?
К сожалению, не все машины проходят испытания на соответствие стандарту EN / AS60974-1, и поэтому может быть сложно сравнить номинальные значения рабочего цикла одних машин с другими.Например, , если испытание Weldforce WF-200MST проводилось всего за 5 минут и / или с холодным аппаратом и / или при более низкой температуре окружающей среды, рейтинг вполне мог быть 200 А при 50-60%, что быть нереалистичным и вводящим в заблуждение.
Все машины Weldforce от Weldclass проходят испытания на рабочий цикл в соответствии с EN / AS60974-1, что означает, что указанные значения рабочего цикла точно представляют, как каждая машина будет работать в «реальных» условиях.
Рабочий цикл — лучший способ оценить производительность сварочного аппарата?
Да и нет!
Номинальный рабочий цикл — при условии, что он точен и не завышен (как это иногда бывает) — является полезным показателем того, как сварочный аппарат будет работать с точки зрения производительности и мощности (или производительности).
Однако рабочий цикл не следует рассматривать изолированно.
Так же, как вы (обычно) не принимаете решение о покупке автомобиля, основываясь только на его максимальной скорости (скажем, без учета таких аспектов, как управляемость, ускорение, безопасность и т. Д.) … Таким же образом существуют и другие факторы. следует учитывать, когда речь идет о сварочных машинах.
Во-первых, сам процесс сварки может изменить значение продолжительности включения. Более высокий рабочий цикл может быть важен для сварщиков MIG, но может быть менее важным для Stick / MMA и TIG.См. Дополнительную информацию об этом ниже.
Потребляемая мощность, источник питания и эффективность сварочного аппарата также добавляют еще одно измерение к вопросу о рабочем цикле.
Это особенно характерно для однофазных (240 В) сварочных аппаратов, где аппарат (в соответствии со стандартом AS60974-1) должен иметь эффективный входной ток (I 1eff ), равный или меньший номинальной мощности.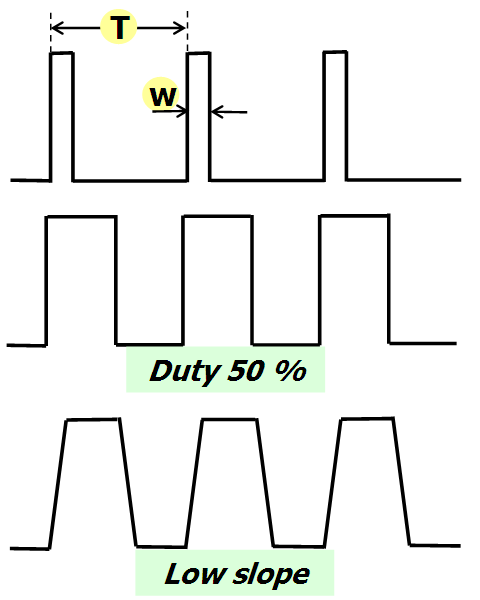 источник питания, на который рассчитана машина — обычно 10А или 15А.
источник питания, на который рассчитана машина — обычно 10А или 15А.
Часто это требование является ограничением (или «потолком») рабочего цикла, в большей степени, чем то, на что фактически способна машина. Например, сварочный аппарат Weldforce WF-180MST MIG имеет рабочий цикл 10% при максимальной мощности 180 А. Эта машина на самом деле способна к значительно более высокому рабочему циклу, но для того, чтобы быть подходящей для источника питания 10 А, мощность и рабочий цикл были ограничены или ограничены.
Вот почему машины с большей эффективностью имеют преимущество (особенно однофазные машины 240 В 10 А / 15 А).Благодаря большей эффективности они могут обеспечить более высокую мощность и рабочий цикл при том же уровне потребляемой мощности.
Следующие машины Weldclass включают технологию «PFC», которая значительно увеличивает эффективность и увеличивает рабочий цикл; Сварочные аппараты Weldforce WF-205MST и WF-255MST MIG / Stick / TIG и плазменный резак Cutforce CF-45P.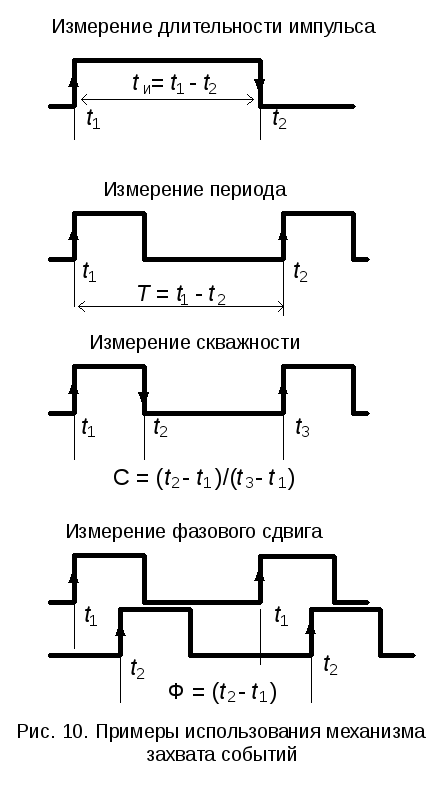
Важность рабочего цикла в различных сварочных процессах
Хотя рабочий цикл никогда не бывает «второстепенным», различные сварочные процессы предъявляют более высокие или низкие требования к сварочному аппарату с точки зрения производительности или рабочего цикла.
Приведенные ниже комментарии основаны на «практическом опыте» и могут служить руководством к тому, какое внимание следует уделять номинальным рабочим циклам — по сравнению с другими факторами и характеристиками — при выборе подходящего сварочного аппарата.
Обратите внимание, что все приложения индивидуальны, и общие комментарии здесь не всегда могут быть применимы к вашей ситуации.
Рабочий цикли сварка MIG
Поскольку это автоматический процесс (например, присадочный металл подается автоматически), оператор MIG имеет возможность выполнять сварку в течение длительных периодов времени с минимальным временем отключения или простоя между сварками.
Конечно, это зависит от приложения к приложению.
В производственных ситуациях, например, когда могут использоваться приспособления для минимизации настройки и максимального увеличения «времени сварки», рабочий цикл может быть очень важным. Когда дело доходит до выбора правильного сварщика, выбор сварщика, у которого «слишком много» мощности, а не «ровно столько», является мудрым решением. Например, ваше приложение может включать производственную сварку стали толщиной до 8 мм. Теоретически сварочный аппарат на 200 А, такой как Weldforce WF-205MST, способен на это, однако в производственной ситуации аппарат на 250 А (например, WF-255MST) будет обеспечивать больший рабочий цикл.(При токе 200 ампер WF-255MST имеет почти вдвое больший рабочий цикл, чем WF-205MST).
При техническом обслуживании рабочий цикл может быть не столь критичным, поскольку% «Время сварки» обычно ниже. Часто оператор может выполнить всего 1 или несколько сварных швов, прежде чем ему придется выполнять другие операции перед возобновлением следующего шва.
Becuase MMA / сварка стержнем — это очень ручной процесс, включающий замену электродов, измельчение шлака и т. Д. — процент времени, которое оператор тратит на фактическую сварку, обычно намного меньше, чем при сварке MIG.Это означает, что рабочий цикл обычно не так критичен, как для MIG.
С этой точки зрения рабочий цикл 30% (в случае MMA) можно считать «высоким». Например, Weldforce WF-135S — это самый маленький аппарат MMA / Stick в диапазоне Weldclass (максимальная выходная мощность 140 А), но с рабочим циклом 100 А при 60% его мощности достаточно для работы с обычными электродами 2,6 мм почти без остановок и также легко будет использовать электрод 3,2 мм.
Исключения из этого правила — приложения для стержней / MMA, требующие очень высокого рабочего цикла — могут включать наплавку, когда каждый электрод запускается в быстрой последовательности с очень небольшим «тайм-аутом».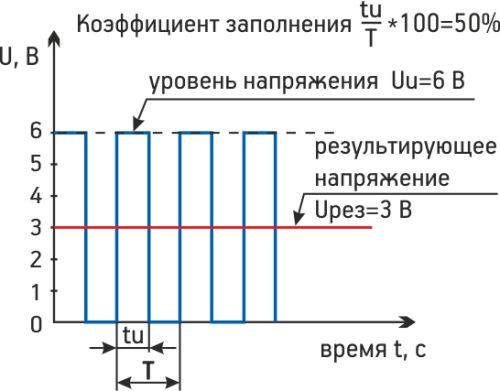
Рабочий цикл и сварка TIG
Когда дело доходит до сварки TIG, значение рабочего цикла может значительно варьироваться.
TIG обычно используется для детальной работы с более тонкими материалами и / или небольшими деталями. В этом случае машина часто даже близко не приближается к достижению предела рабочего цикла … и действительно, большая часть сварочных работ выполняется при низкой силе тока, когда рабочий цикл машины может составлять 100%. Кроме того, поскольку TIG — это ручной процесс (когда присадочный металл подается вручную), соотношение «время сварки / время включения» и «время выключения» ниже (по сравнению с MIG).
Однако есть некоторые приложения для сварки TIG, где очень важен высокий рабочий цикл. Одним из примеров этого является сварка TIG стыков труб, когда требуется длинный непрерывный шов.
Комментарии и вопросы?
Есть свои мысли или вопросы по дежурному циклу? Не стесняйтесь оставлять комментарии ниже ↓ или нажмите здесь, чтобы отправить нам запрос.
Еще статьи по инверторным сварочным аппаратам;
Что такое инверторный сварочный аппарат и как он работает?
Использование генераторов для питания инверторных сварочных аппаратов
Что такое горячий пуск, сила дуги и защита от прилипания?
Все артикулы сварочных аппаратов
Несмотря на то, что были приняты все меры, Weldclass не несет ответственности за любые неточности, ошибки или упущения в этой информации, ссылках и приложениях.Любые комментарии, предложения и рекомендации носят только общий характер и не могут применяться к определенным приложениям. Пользователь и / или оператор несут исключительную ответственность за выбор соответствующего продукта для их предполагаемого назначения и за обеспечение того, чтобы выбранный продукт мог правильно и безопасно работать в предполагаемом приложении. E. & O.E.
4 типа рабочих циклов двигателя, которые должен знать каждый инженер
 youtube.com/embed/O-ODHlWzDj8″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/O-ODHlWzDj8″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
При выборе двигателя важно учитывать требуемый рабочий цикл, чтобы двигатель соответствовал потребностям приложения.Это сообщение в блоге и прилагаемое к нему видео о световых табло предоставят базовое введение в рабочие циклы мотоциклов и некоторые из наиболее распространенных типов рабочих циклов.
Международная электротехническая комиссия (МЭК) определяет восемь классификаций рабочего цикла, которые сгруппированы по непрерывным, краткосрочным или периодическим циклам. Эти циклы относятся к последовательности и продолжительности во времени всех аспектов типичной операции, включая запуск, работу без нагрузки, работу с полной нагрузкой, электрическое торможение и отдых.Эти операции рассматриваются по тому, как они влияют на температуру двигателя, чтобы определить, подходит ли выбранный двигатель для применения, требуется ли усиленное охлаждение, такое как вентилятор принудительной вентиляции, или нужно ли использовать совершенно новый двигатель.![]()
Первым и самым простым типом рабочего цикла двигателя является непрерывный режим. Он также обозначается сокращенным названием S1 duty (, рис. 1, ).В этом типе работы двигатель работает с постоянной нагрузкой в течение достаточно длительного времени, чтобы достичь теплового равновесия. Это также предполагает, что запуск двигателя оказывает незначительное влияние на температуру двигателя. Примером режима работы S1 может быть вентилятор, который включен, а затем позволяет работать без остановок
# 2 Кратковременная работа (S2) Второй тип рабочего цикла двигателя — кратковременный. Подобно непрерывному режиму, эта операция выполняется с постоянной нагрузкой.В отличие от непрерывного режима, он отключается до достижения теплового равновесия. Затем двигателю дают отдохнуть достаточно долго, чтобы он достиг температуры окружающей среды.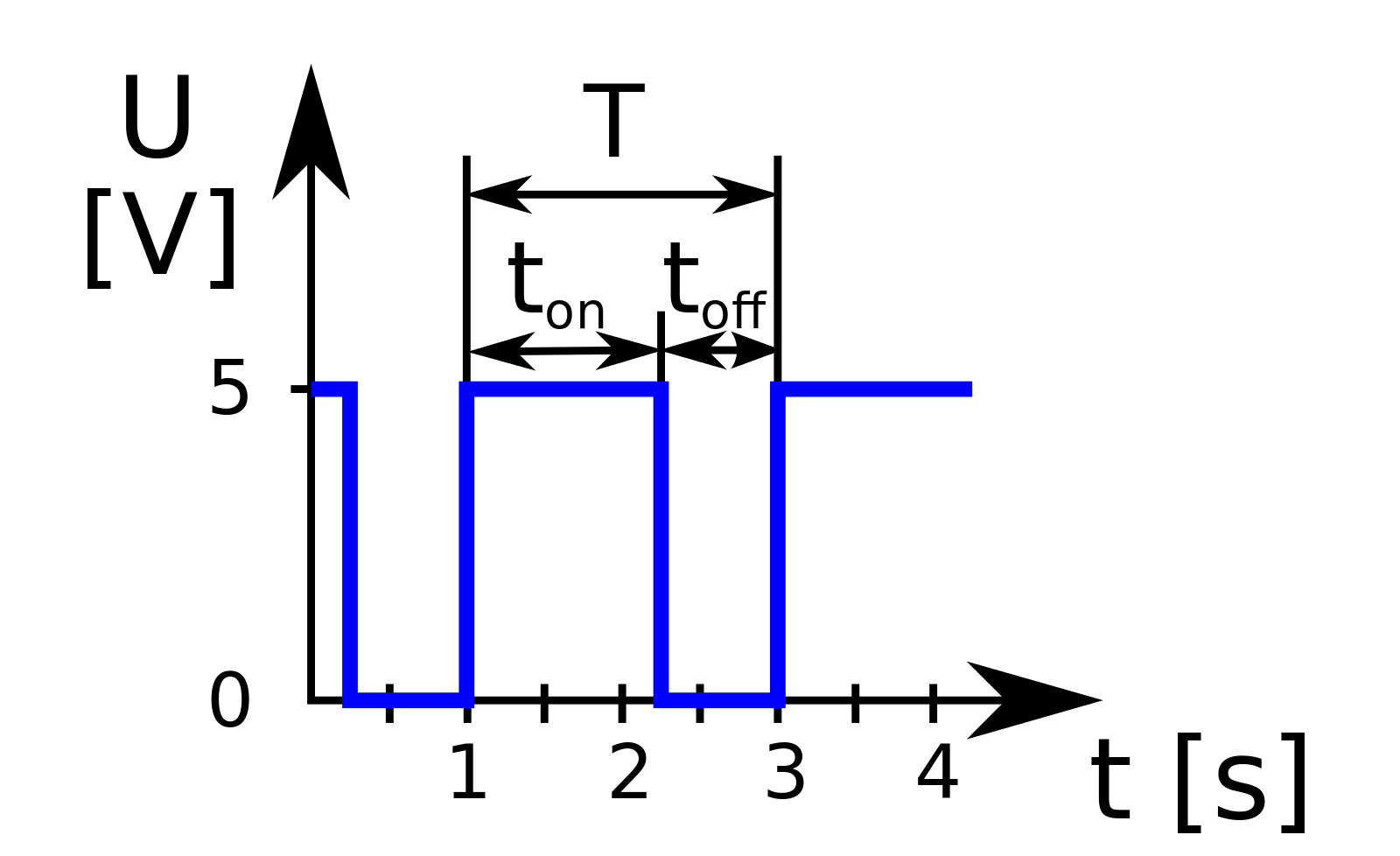 Кратковременный режим обозначается S2, за которым следует количество минут в цикле (S2 30 минут).
Кратковременный режим обозначается S2, за которым следует количество минут в цикле (S2 30 минут).
Периодический режим обозначается обозначениями S3-S8. К ним относятся циклы с отдыхом и без него, включающие запуск, электрическое торможение и / или изменение скорости / нагрузки.Во всех этих обозначениях различные операции цикла повторяются с течением времени, и двигатель не может достичь теплового равновесия.
# 3 Прерывистый периодический режим (S3) Прерывистый периодический режим — это простейший вид периодического режима. Эта последовательность идентичных циклов содержит период постоянной нагрузки и период покоя. Это очень похоже на режим S2, но отличается тем, что он никогда не достигает температуры окружающей среды во время периода покоя.Этот рабочий цикл обозначается сокращенно как S3, за которым следует процент времени нахождения под нагрузкой (S3 xx%, где% = ∆ T c / T ). Примером прерывистого периодического режима может быть конвейер, который работает с постоянными интервалами с одинаковой загрузкой.
Примером прерывистого периодического режима может быть конвейер, который работает с постоянными интервалами с одинаковой загрузкой.
Последний пример рабочего цикла двигателя — непрерывная работа с электрическим торможением. Этот цикл включает в себя последовательность запуска, постоянной нагрузки и электрического торможения.К тому же во время операции нет времени на отдых. Этот тип рабочего цикла обозначается аббревиатурой S7, за которым следует момент инерции двигателя и нагрузки (J m и J L ).
Другие периодические рабочие циклы S4-S6 и S8-S9 аналогичны S3 и S7, но могут выполняться с или без отдыха, запуска, торможения и нагрузки.
Заключение При покупке двигателя важно учитывать требуемую работу и указывать рабочий цикл.Это гарантирует, что правильный двигатель будет выбран для приложения.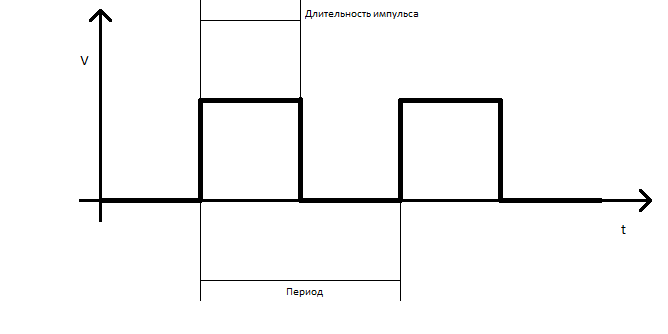
Для получения дополнительной информации о рабочих циклах двигателя и выбора двигателя, наиболее подходящего для вашего применения, свяжитесь с инженером по применению в KEB America сегодня.
Что такое рабочий цикл сварки?
Независимо от того, сварщик вы или нет, слова «рабочий цикл» могут иметь для вас, по крайней мере, неопределенное значение. Для тех, кто знаком с принципами работы практически любого процесса, «рабочий цикл» может даже показаться самоочевидным.
Но что такое рабочий цикл при сварке?
Рабочий цикл — это термин, обозначающий процент времени, в течение которого машина будет работать и безопасно выполнять сварку в течение определенного промежутка времени при заданной силе тока. Это похоже на « производственные циклы », где вы вычисляете, сколько продукции в среднем производится в течение заданного периода времени, но поскольку рабочий цикл ориентирован на машину, а не на производительность, которую она производит, он используется для измерения безопасной работы. машины.
машины.
Например, конкретный сварочный аппарат может иметь рабочий цикл 200 А при 60%. Это означает, что каждые 10 минут машина безопасно работает при 200 А в течение примерно 6 минут. В оставшееся время — 40% — машина должна переключиться на тепловую перегрузку и дать себе остыть.
Что такое рабочий цикл при сварке?
Поскольку сварочные аппараты должны иметь дело с большим количеством высоких температур, они должны быть оснащены защитой от тепловой перегрузки, чтобы гарантировать, что в случае слишком высокой температуры он автоматически отключится, чтобы предотвратить повреждение любого из его критических внутренних компонентов.Как только машина достигнет более низких, более прохладных и безопасных температур, она перезапустится.
Рабочий цикл меняется при разной силе тока.
Например, для машины, о которой мы упоминали ранее, если сила тока была 100 А вместо 200, рабочий цикл не только увеличился, но и непропорционально. Уменьшая силу тока, вы уменьшаете вероятность слишком быстрого нагрева машины, тем самым увеличивая рабочий цикл.
Как рассчитать рабочий цикл
Рабочий цикл довольно легко вычислить.
Вам нужно только увидеть, как долго машина оставалась включенной во время тестирования, и указать это в процентах. Однако некоторые переменные действительно вступают в уравнение, чтобы изменить результат.
Период, в течение которого тестировалась машина, может иметь значение. Чаще всего тест длится 5 или 10 минут, но поскольку 10 минут более требовательны, рабочий цикл для таких тестов может быть меньше.
Атмосфера окружающей среды, в которой проводился тест, также оказывает влияние. При более высокой температуре окружающей среды машина нагревается быстрее.
Последней переменной является то, проводился ли тест на «свежей» машине или на уже нагретой после использования. Неудивительно, что тестирование уже горячей машины будет намного жестче с точки зрения ее системы охлаждения, чем холодная.
Европейский стандарт является наиболее широко применяемым для тестирования рабочих циклов оборудования, поскольку он требователен и рассматривает производительность машины в «реальных» условиях по сравнению с таковыми в контролируемой среде.
Использование рабочих циклов для оценки производительности машины
Учитывая все это, можно ли использовать рабочий цикл для оценки того, насколько хорошо машина выполняет хорошую идею? Ответ не так прост: да или нет.
Хотя рабочий цикл дает четкое представление о том, насколько хорошо вы сможете работать с машиной, многие люди не понимают эту идею. Рабочий цикл — это не «время, в течение которого он проработает», и не только производительность и мощность.
Хотя существует корреляция, на рабочий цикл можно положиться как на критерий оценки, только если он точен и не завышен, как во многих ситуациях.
Самого по себе рабочего цикла машины недостаточно, чтобы сделать какое-либо заявление о производительности машины.Точно так же, как вы не оцениваете качество автомобиля на основе максимальной скорости, с которой он может работать, вы не можете оценить качество сварочного аппарата на основе его рабочего цикла, поскольку при выборе необходимо учитывать множество других факторов.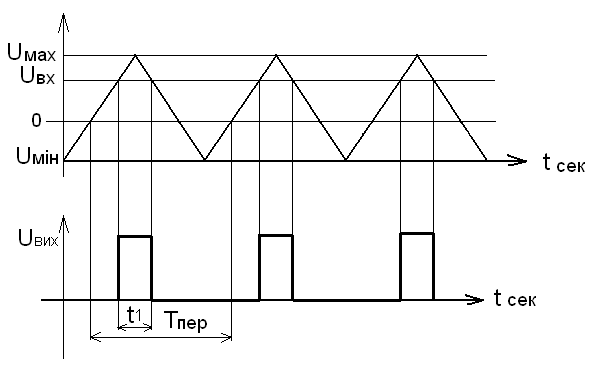 машина.
машина.
Учтите, что сам процесс сварки может влиять на важность рабочего цикла. Например, при сварке MIG он может быть значительным фактором, тогда как при сварке TIG или сваркой штучной сваркой он гораздо менее важен.
Другими важными частями сварочного аппарата, которые следует учитывать при оценке качества, являются электропитание, эффективность и т. Д.Некоторые машины созданы для работы и работают от гораздо более слабого источника питания, чем он может выдержать.
Например, машина может работать на гораздо более высокой силе тока, но ограничена 10А.
Если бы сила тока была выше, у машины мог бы быть другой рабочий цикл. Этот источник питания также накладывает ограничение на рабочий цикл и ограничивает его.
Следовательно, никогда нельзя быть уверенным в том, где рабочий цикл является хорошим стандартом для суждения или нет. В большей степени, чем рабочий цикл, машины лучше оцениваются по их эффективности — сочетанию более высокой выходной мощности и лучшего рабочего цикла при том же уровне потребляемой мощности.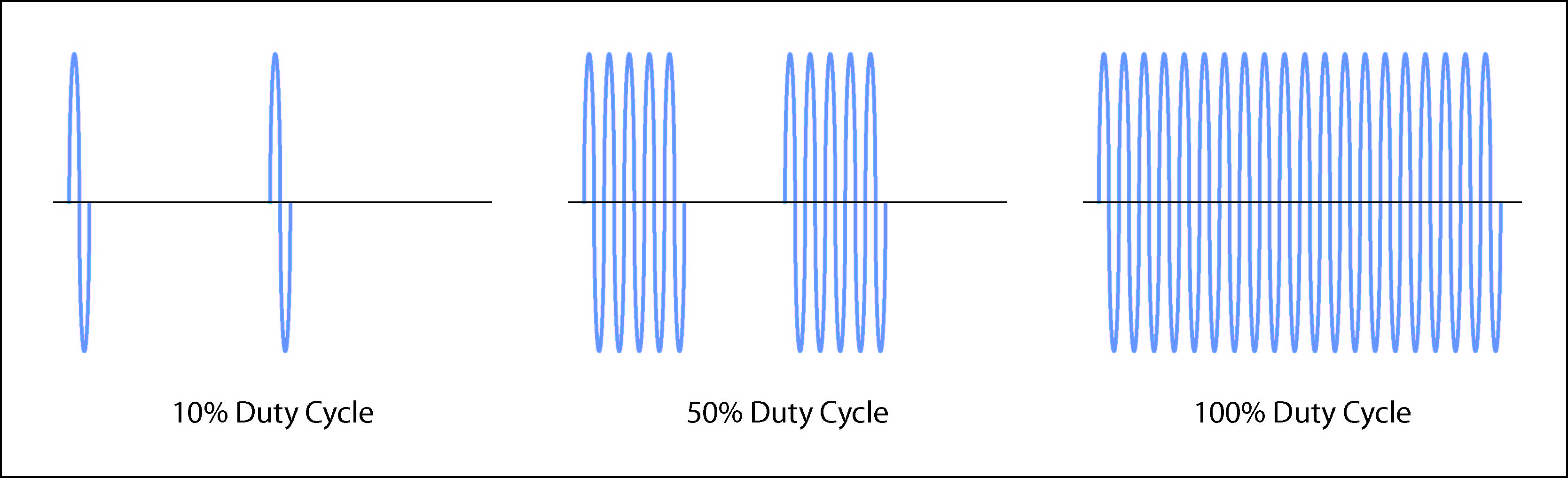
Рабочий цикл — это просто еще один способ оценить одну сторону эффективности машины, поэтому лучше сосредоточиться на эффективности, а не на множителе с таким количеством переменных.
Рабочий цикл, тем не менее, важен, и хотя на первый взгляд может показаться, что это всего лишь ограничение по времени, налагаемое на то, как долго вы можете сваривать на машине, позже вы можете понять, что, работая на машине дольше, чем предполагаемый рабочий цикл, качество сварного шва ухудшится, и он может стать жестче и взбалтываться.
Не только это, но это также может быть опасно, поскольку машина, оставленная в работе слишком долго, может загореться и причинить вред. Однако качественные машины отключаются сами по себе, поэтому, если вы используете хорошую, вы будете в безопасности.
Рабочий цикл и сварка MIG
Рабочий цикл играет гораздо более важную роль при сварке MIG, чем при других видах сварки. Это может быть связано с тем, что сварка MIG — это автоматический процесс, при котором присадочный металл подается автоматически.
Таким образом, оператор MIG может выполнять сварку дольше, чем просто делать паузы между сварками для подачи присадочного металла или выполнения каких-либо других задач.
Это будет зависеть от конкретной ситуации, но если сварочная станция настроена так, чтобы максимизировать «время сварки» машины, рабочий цикл становится очень важным, особенно с точки зрения производства. В таких случаях лучше выбрать машину, у которой «слишком большой» рабочий цикл, чем машина, которой едва хватает.
Теперь вы можете выполнять сварку более эффективно с помощью машины, способной работать с гораздо более высоким рабочим циклом, и получить необходимое усилие, чтобы убедиться, что во время процесса ничего не выходит из строя.
В то время как производство требует большого количества сварочных работ, это не относится к приложениям для технического обслуживания. Поскольку время сварки настолько мало для обслуживания, рабочий цикл может не иметь большого значения.
Часто для завершения технического обслуживания требуется всего несколько сварных швов.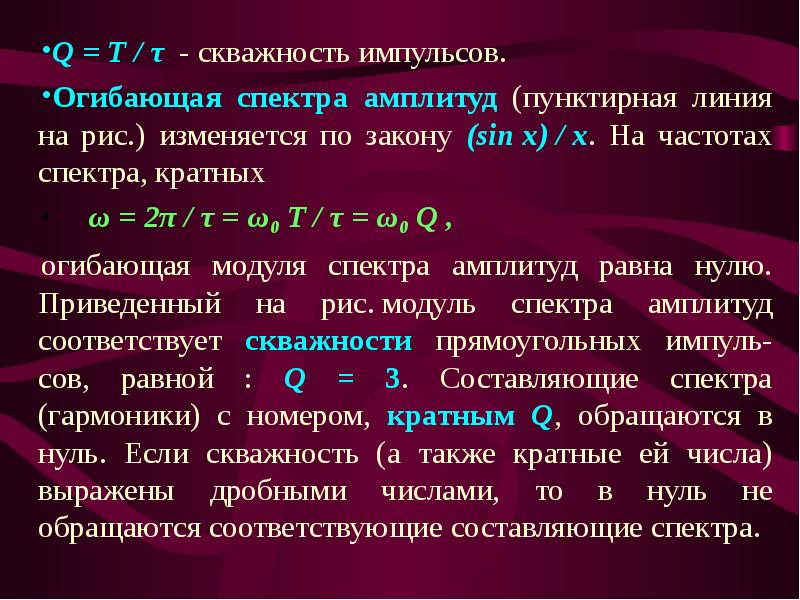 Иногда сварщик может делать перерывы и выполнять другие задачи между сварками.
Иногда сварщик может делать перерывы и выполнять другие задачи между сварками.
Связанные вопросы
Что означает рабочий цикл 60%?
Рабочий цикл 60% означает, что в течение любого периода времени вы можете безопасно запустить сварочный аппарат до 60% этого периода времени при определенной силе тока.Обычно во время тестирования этот процент рассчитывается при работе машины в течение 5-10 минут.
Что такое хороший рабочий цикл?
«Хороший» рабочий цикл будет зависеть от процесса сварки, сварщика и конкретных настроек аппарата. Поскольку рабочий цикл имеет разную степень важности для разных задач и варьируется в зависимости от силы тока и т. Д., Нет «одного» подходящего рабочего цикла.
Какие факторы влияют на рабочий цикл?
На рабочий цикл влияет несколько факторов, таких как сила тока и напряжение, хотя напряжение учитывается редко.Важны и температура окружающей среды, и вентиляция. У машины, прислоненной к стене, будет меньше воздушного потока, создаваемого вентилятором, а без надлежащего воздушного потока машина будет быстрее нагреваться и медленнее остывать, что влияет на рабочий цикл.
Похожие сообщения:
Рабочий цикл часов
Рабочий цикл : Рабочий цикл часов определяется как часть периода тактов, в течение которого часы находятся в активном состоянии. Рабочий цикл часов обычно выражается в процентах.Например, на рисунке ниже показано, что часы с активным состоянием «1» остаются на низком уровне в течение 2 нс в течение периода 10 нс. Следовательно, его рабочий цикл составляет 20%.
Как рабочий цикл влияет на синхронизацию : Рабочий цикл часов играет большую роль в синхронизации проектов. Нам необходимо учитывать следующие факторы, связанные с изменением рабочего цикла во время отсчета времени:
Синхронизация полупериодов : Если в проекте есть триггеры, запускаемые по фронту, и положительный, и отрицательный, рабочий цикл тактового генератора имеет большое значение.Например, если у нас есть тактовая частота 100 МГц с рабочим циклом 20%; Для пути синхронизации от триггера, запускаемого положительным фронтом, к триггеру, запускаемому отрицательным фронтом, мы получаем только 2 нс для времени установки для пути от положительного к отрицательному и 8 нс для пути от отрицательного к положительному положению по сравнению с 10 нс для полного цикла.
Однако, если бы тот же тактовый генератор имел рабочий цикл 50%, мы получили бы 5 нс для того же временного интервала полупериода.
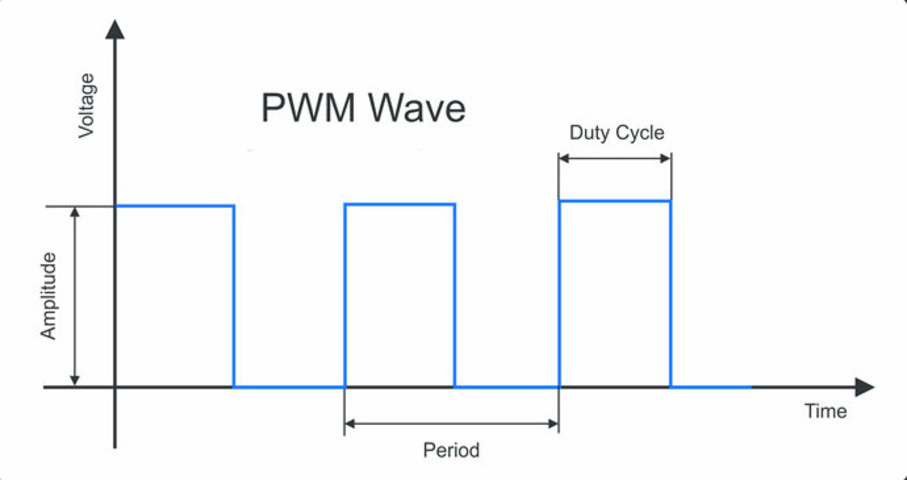 Однако, если бы тот же тактовый генератор имел рабочий цикл 50%, мы получили бы 5 нс для того же временного интервала полупериода.
Однако, если бы тот же тактовый генератор имел рабочий цикл 50%, мы получили бы 5 нс для того же временного интервала полупериода.- Требования к минимальной ширине импульса : На высоких частотах рабочий цикл имеет большое значение.Например, каждый последовательный элемент имеет требование минимальной ширины импульса, которая должна его достичь (прочтите это). Если рабочий цикл часов не приближается к 50%, мы ограничены в обеспечении высокой частоты, даже если мы способны обеспечить синхронизацию на еще более высоких частотах. Возьмем пример. Если минимальная длительность импульса триггера составляет 500 пс, то с тактовой частотой 50% мы можем использовать тактовую частоту 1 ГГц (период тактовой частоты 1 нс). Но если мы используем тактовую частоту с рабочим циклом 20%, мы не можем использовать тактовую частоту выше 400 МГц.
Имея в виду вышеизложенное, имеет смысл использовать часы с рабочим циклом, близким к 50%. Однако во многих сценариях это может оказаться невозможным. Итак, нужно определиться с приоритетами; то есть сложности архитектуры против сложности синхронизации. Генерация разделенных часов с 50% -ным рабочим циклом не всегда возможна, и есть несколько сложностей, связанных с архитектурой. Например, синхронизация формы сигнала часов между часами, если есть несколько делителей.Кроме того, для нечетных коэффициентов деления, таких как div_by_3 и т. Д., Нам нужна более сложная схема делителя, чем то, что может потребоваться для Divin_by_2 или diver_by_4 и т. Д.
Однако во многих сценариях это может оказаться невозможным. Итак, нужно определиться с приоритетами; то есть сложности архитектуры против сложности синхронизации. Генерация разделенных часов с 50% -ным рабочим циклом не всегда возможна, и есть несколько сложностей, связанных с архитектурой. Например, синхронизация формы сигнала часов между часами, если есть несколько делителей.Кроме того, для нечетных коэффициентов деления, таких как div_by_3 и т. Д., Нам нужна более сложная схема делителя, чем то, что может потребоваться для Divin_by_2 или diver_by_4 и т. Д.
Общие сведения о рабочем цикле и фазовом угле квадратурных датчиков
Цифровые импульсные датчики на эффекте Холла Sensor Solutions обеспечивают выходные сигналы прямоугольной формы, которые можно подключать к счетчикам, ПЛК и другим устройствам мониторинга и управления для определения скорости или подсчета. Квадратурные выходные датчики обеспечивают два выхода в одном корпусе, которые не совпадают по фазе для возможности определения направления.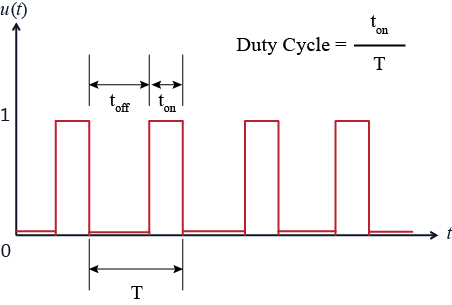 Это руководство по применению было создано для определения рабочего цикла и фазового угла, а также для объяснения того, как измерители и контроллеры определяют скорость и направление по выходным сигналам датчика пульсации.
Это руководство по применению было создано для определения рабочего цикла и фазового угла, а также для объяснения того, как измерители и контроллеры определяют скорость и направление по выходным сигналам датчика пульсации.
ОПРЕДЕЛЕНИЯ
Рабочий цикл
Если смотреть на цифровой выход прямоугольной волны, рабочий цикл — это процент времени, в течение которого выход находится в высоком состоянии в течение периода прямоугольной волны. На изображении ниже показана формула для расчета рабочего цикла, а также примеры последовательностей импульсов с коэффициентом заполнения 50% и 25%.
Phase Angle
Если смотреть на выходы квадратурного датчика, фазовый угол является мерой смещения между двумя последовательностями импульсов. Когда рабочие циклы не равны 50%, при вычислении фазового угла необходимо учитывать весь период. На изображении ниже показаны примеры фазовых углов 90 градусов с коэффициентом заполнения 50% по сравнению с коэффициентом заполнения 25%.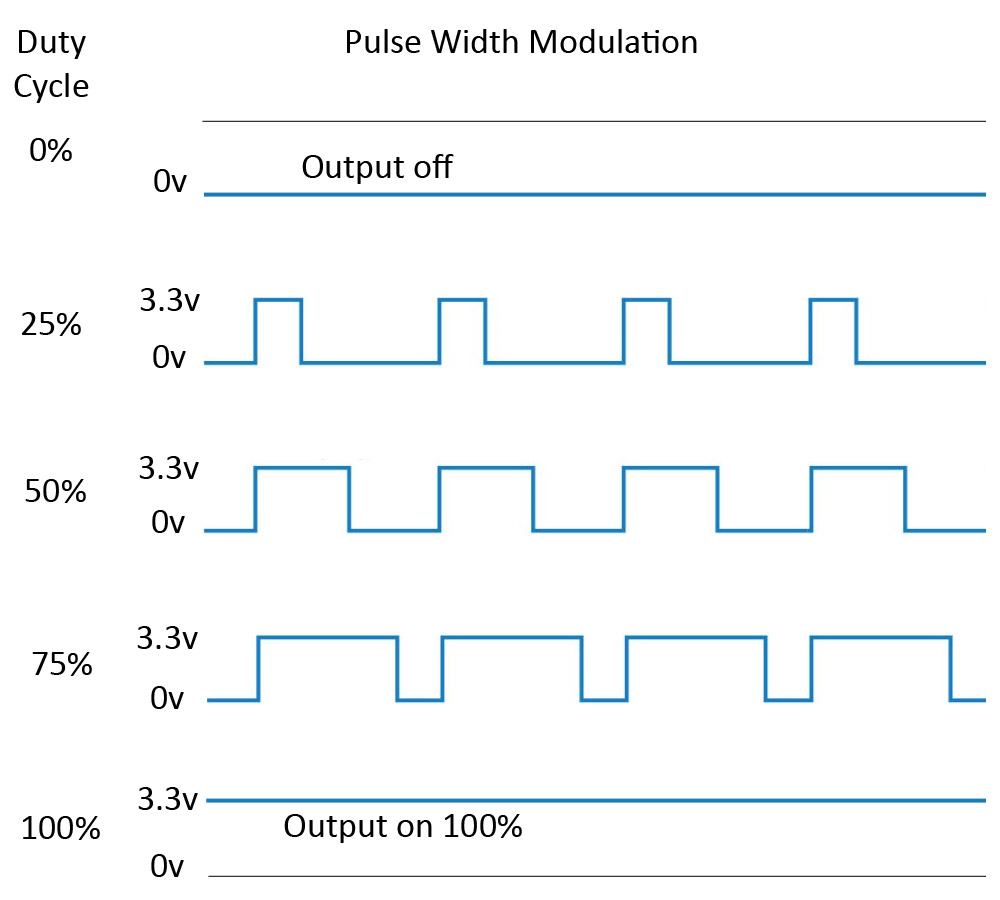
Для вычисления фазового угла измеряется задержка между двумя импульсами относительно периода импульса.Sensor Solutions измеряет задержку от центра высокого импульса от канала A до центра высокого импульса от канала B. Формула для расчета фазового угла показана ниже.
ПОЧЕМУ ВАЖНЫ РАБОЧИЙ ЦИКЛ И ФАЗОВЫЙ УГОЛ?
Квадратурные датчикииспользуются в приложениях для чувствительного к направлению счета и измерения скорости. Измерители и устройства управления смотрят на две последовательности импульсов, чтобы определить направление движения. Обычно это выполняется путем сравнения спадающих или нарастающих фронтов импульсов или сравнения одного фронта с выходным состоянием другого импульса.
ИДЕАЛЬНЫЙ РАБОЧИЙ ЦИКЛ И ФАЗОВЫЙ УГОЛ: На изображении ниже показан рабочий цикл 50% с фазовым углом 90 градусов. В этой конфигурации, независимо от того, где происходит изменение направления или как контроллер определяет направление, соотношение между задними фронтами импульса обеспечивает уведомление об изменении направления на первом импульсе.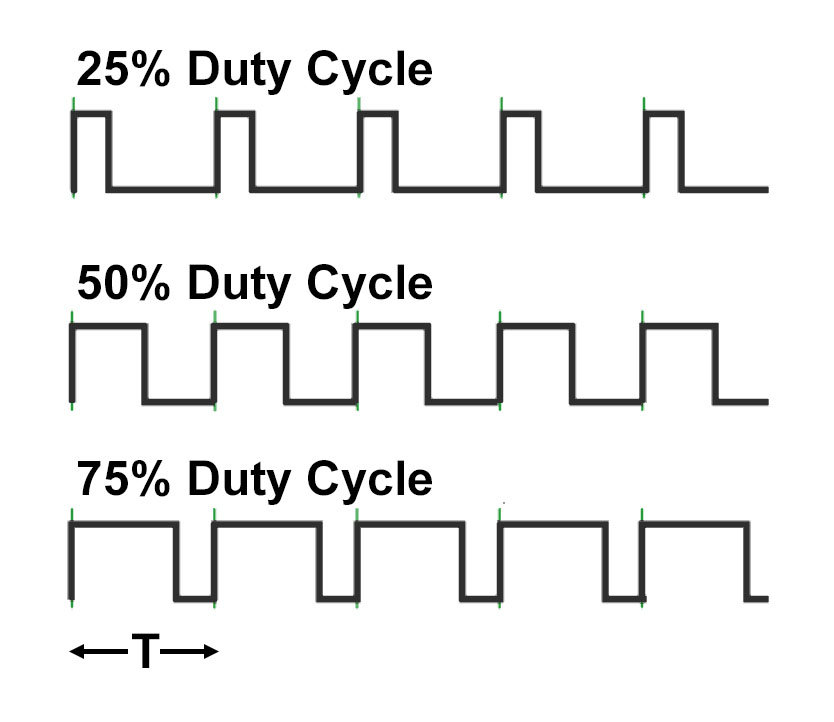 Хотя эта конфигурация идеальна, добиться ее чрезвычайно сложно.
Хотя эта конфигурация идеальна, добиться ее чрезвычайно сложно.
ПЛОХОЙ РАБОЧИЙ ЦИКЛ И ИДЕАЛЬНЫЙ ФАЗОВЫЙ УГОЛ: На изображении ниже показан рабочий цикл 25% с фазовым углом 90 градусов.В этой конфигурации, независимо от того, где происходит изменение направления, контроллер, определяющий направление, сравнивая только задние фронты, всегда распознает изменение направления на первом импульсе. Однако направление разрешения измерителя путем сравнения нарастающего фронта канала A с выходным состоянием канала B может не разрешить изменение направления должным образом, поскольку канал B падает во время подъема канала A.
ИДЕАЛЬНЫЙ РАБОЧИЙ ЦИКЛ И НЕПРАВИЛЬНЫЙ ФАЗОВЫЙ УГОЛ: На изображении ниже показан рабочий цикл 50% с фазовым углом 30 градусов.В этой конфигурации, независимо от того, где происходит изменение направления, контроллер будет определять направление правильно. Однако по мере того, как фазовый угол отклоняется от 90 градусов, коэффициент заполнения должен быть ближе к 50%, чтобы обеспечить читаемую последовательность импульсов.
ПЛОХОЙ РАБОЧИЙ ЦИКЛ И НЕПРАВИЛЬНЫЙ ФАЗОВЫЙ УГОЛ: В реальном мире большинство комбинаций датчика и цели будут давать рабочий цикл больше или меньше 50% с фазовым углом, который не точно составляет 90 градусов. В приведенном ниже примере показаны последовательности импульсов, которые имеют как плохой рабочий цикл, так и плохой фазовый угол.
Контроллер может по-прежнему определять направление правильно, но в зависимости от положения зуба при изменении вращения он может не распознавать изменение направления до тех пор, пока второй зуб не пройдет мимо датчика. Если счетчик ведет счет, это приведет к неточному счету.
ВЫБОР ПРАВИЛЬНОГО ДАТЧИКА КВАДРАТУРЫ ДЛЯ ВАШЕЙ МИШЕНИ:
Многие производители заявляют, что их квадратурный датчик обнаружения зубьев шестерни будет работать с любым стандартным шагом шестерни.Хотя это правда, что они будут обеспечивать две последовательности импульсов в противофазе, ответ не так прост. Точное определение направления будет зависеть от размера зубьев шестерни, расстояния между ними, расстояния между чувствительными элементами внутри датчика и метода, которым система управления рассчитывает направление.
Точное определение направления будет зависеть от размера зубьев шестерни, расстояния между ними, расстояния между чувствительными элементами внутри датчика и метода, которым система управления рассчитывает направление.
Для измерения скорости или счета, чувствительного к направлению от шестерни, тонального колеса или другой цели с равномерно расположенными черными «зубьями», используйте квадратурный датчик зубьев шестерни с истинной нулевой скоростью.Щелкните здесь, чтобы открыть мастер выбора датчика и создать датчик с электрическим выходным типом и физической упаковкой, который соответствует требованиям вашей системы управления. Выбранный вами датчик будет построен, откалиброван и протестирован на основе шага вашей целевой передачи.
Для чувствительного к направлению измерения скорости от таких целей, как головки болтов, отдельное отверстие в стальном диске или других железных целей с неравномерным расстоянием между ними, датчик зубьев самокалибрующейся квадратурной шестерни обычно является лучшим выбором. Щелкните здесь, чтобы открыть мастер выбора датчика и создать датчик с электрическим выходным типом и физической упаковкой, который соответствует требованиям вашей системы управления. Выбранный вами датчик будет построен и протестирован на основе шага вашей целевой передачи.
Щелкните здесь, чтобы открыть мастер выбора датчика и создать датчик с электрическим выходным типом и физической упаковкой, который соответствует требованиям вашей системы управления. Выбранный вами датчик будет построен и протестирован на основе шага вашей целевой передачи.
Для чувствительного к направлению измерения скорости или счета с одного или нескольких магнитов Sensor Solutions предлагает датчики с квадратурным переключателем Холла. Щелкните здесь, чтобы открыть мастер выбора датчика и создать датчик с электрическим выходным типом и физической упаковкой, который соответствует требованиям вашей системы управления.
Sensor Solutions предлагает широкий выбор целевых магнитов, в том числе магниты с необработанными элементами, магниты, установленные в головках болтов, и зажимные кольца вала, которые можно использовать в паре с нашими датчиками для измерения скорости или счетчика, чувствительных к направлению.
Свяжитесь с инженером по применению сенсорных решений сегодня, чтобы получить помощь в определении наилучшего сочетания сенсора и мишени для вашего приложения.
ПРОЕКТНЫЕ ЦЕЛИ ДЛЯ ДАТЧИКОВ КВАДРАТУРЫ:
Итак, как спроектировать целевую передачу, обеспечивающую рабочий цикл около 50%? Хотя логическая мысль состоит в том, чтобы ваши «зубы» были того же размера, что и промежуток между ними, это не так.Датчик магнитного поля будет генерировать импульс, длина которого превышает длину «зуба». Поэтому для достижения 50% рабочего цикла идеальное соотношение — это меньшие зубцы с более широким зазором между ними. Sensor Solutions предлагает еще одно примечание по применению по целевому дизайну, щелкните здесь, чтобы открыть его.
Щелкните здесь, чтобы вернуться к указателю заметок по применению
.