Двухфазный двигатель — это… Что такое Двухфазный двигатель?
Двухфазный двигатель — электрический двигатель с двумя обмотками, сдвинутыми в пространстве на 90°. При подаче на двигатель двухфазного напряжения, сдвинутого по фазе на 90°, образуется вращающееся магнитное поле. Короткозамкнутый ротор двигателя обычно изготавливается в виде «беличьего колеса». Обычно число стержней короткозамкнутого ротора не связано с числом пар полюсов статора, то есть при двух парах полюсов статора число стержней ротора может быть например 14 штук. Есть некие соображения, по которым число стержней ротора должно быть связано с числом полюсов ротора.
Асинхронный однофазный электродвигатель.
Если прервать один из трех питающих проводов вращающегося асинхронного трехфазного электродвигателя, то при небольшой нагрузке он будет продолжать работу на одной фазе. В двигателе остается вращающееся поле. Однако при однофазном включении в состоянии покоя такой двигатель не будет работать даже без нагрузки.
Асинхронный двухфазный электродвигатель.
Рис. 1. Двухфазные асинхронные двигатели:
А — с короткозамкнутым ротором; б — с полым ротором
Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если обе фазы этих обмоток пространственно смещены на 90° друг относительно друга. Если фазы обмотки питать двумя токами, смещенными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.
В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трехфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля.
Если обе фазы обмотки ротора питать от одной и той же сети однофазного тока, то сдвиг фаз в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован путем подключения конденсатора с достаточной емкостью. На рис.1, а показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
В настоящее время расширилась сфера применения двухфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозамкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами.
Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу.
Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.
Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.
Серийные конденсаторные двухфазные двигатели
- КДП-2
- КДП-4
- КД-5
- КД-6-4 лицензионный японский двигатель
См. также
Литература
к.т.н., профессор Шишкин В.П. ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ (рус.) (2001). — ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ.(недоступная ссылка — история) Проверено 6 февраля 2009. Однофазный и двухфазный асинхронный двигатель http://techno.x51.ru/index.php?mod=text&uitxt=948
Конденсаторный двигатель
Конденсаторный двигатель или конденсаторный асинхронный электродвигатель — двухфазный асинхронный электродвигатель одна фаза которого постоянно подключена к сети переменного тока через конденсатор.
В ГОСТ 27471-87 [1] дано следующее определение:
Конденсаторный двигатель — двигатель с расщепленной фазой, у которого в цепь вспомогательной обмотки постоянно включен конденсатор.
Конденсаторный двигатель, хотя и питается от однофазной сети, по существу является двухфазным.
Ёмкостной сдвиг фаз с рабочим конденсатором
Ёмкостной сдвиг фаз с пусковым и рабочим конденсатором
Конструктивно конденсаторный асинхронный двигатель представляет из себя двухфазный двигатель. На статоре располагают две обмотки фаз, оси которых смещены относительно друг друга на 90 электрических градусов. Обе обмотки занимают равное число пазов. Питание электродвигателя осуществляется от однофазной сети переменного тока, при этом одна обмотка подключается непосредственно к сети, а другая через конденсатор. Таким образом, в отличии от однофазного двигателя, который после пуска работает с пульсирующим магнитным потоком, конденсаторный электродвигатель работает с вращающимся магнитным потоком.
Емкость рабочего конденсатора, требуемая для получения кругового вращающегося поля, определяется по формуле [2]
,
- где Сраб – емкость рабочего конденсатора, Ф,
- IA — ток обмотки A, А,
- IB — ток обмотки B, А,
- — угол фазового сдвига между током IA и напряжением питания U при круговом вращающемся поле, градусов,
- U — напряжение питания сети, В,
- f — частота сети, Гц,
- k — коэффициент, определяемый отношением эффективных чисел витков в обмотках фаз статора B и A.
,
- где – число последовательно соединенных витков в обмотки фазы А и B статора,
- kобА и kобВ — обмоточный коэффициент обмоток фаз статора А и B
Для повышения пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Cп. Для создания пускового момента, равного номинальному, требуется пусковой конденсатор Cп в 2 — 2,5 раза больше рабочего Cр.
Первые электродвигатели. Переменный ток. Уитстон и Тесла
В прошлом номере мы напомнили предысторию создания электродвигателя: в 1820 г. X. Эрстед и Д. Ф. Араго обнаружили взаимодействие магнитного поля с электрическим током, в 1821 г. Ж. Б. Био и Ф. Савар установили его закономерности, в 1827 А. Ампер разработал теорию электродинамики, в 1831 г. М. Фарадей и Дж. Генри открыли явление электромагнитной индукции — вращение проводника с током вокруг магнита, или магнита вокруг проводника.
В 1833 г. У. Риччи создал прообраз электрического мотора с вращательным, а не возвратно-поступательным, как у парового, принципом. В 1834 г. Б. С. Якоби создал действующий электродвигатель и в 1837 г. испытал его в сложных условиях на Неве. В 1860 г. А. Пачинотти изобрёл двигатель с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом, удобной схемой возбуждения и коллектором почти современного типа.
Все эти агрегаты работали от постоянного тока, использование гальванических батарей делало их неэкономичными, а эффективный генератор придумали много позже.
Тем временем велись исследования переменного тока и попытки создания электромоторов с его применением.
Конструкция такого двигателя должна была быть особой — чтобы предотвратить возникновение вихревых токов, порождённых частым периодичным перемагничиванием его электромагнитов, которые разогревают его и снижают мощность.
Первой реализацией такой конструкции в 1841 году была синхронная модель Чарльза Уитстона. Она состояла из кольцеобразного многополюсного магнита, полярность которого менялась под действием переменного тока, и из звездообразного постоянного электромагнита, который вращался на валу при переключении полярности питающего его постоянного тока с помощью специального коммутатора. При включении через цепь сначала пускался постоянный ток, и мотор начинал работать как двигатель постоянного тока, а после набора скорости, соответствовавшей синхронному ходу, коммутатор уже не переменял направление в роторе, и двигатель работал как синхронный переменного тока.
Система требовала для запуска разгонный двигатель, при перегрузке синхронность хода нарушалась, магниты начинали тормозить вращение вплоть до полной остановки. Поэтому широкого распространения синхронные двигатели не получили.
В основу идеи асинхронного (он же индукционный) двигателя был положен опыт Д.-Ф. Араго (1824 г): в лёгком медном кружке, соосном вращающемуся вокруг вертикали подковообразному магниту, наводятся индукционные токи, образованное ими магнитное поле взаимодействует с магнитом, и кружок так же начинает вращаться.
В 1879 г. У. Бейли сконструировал мотор, в котором два электромагнита с четырьмя крестообразно расположенными полюсами он намагничивал, с разной полярностью, с помощью выключателя. Подвешенный над ними медный кружок вращался без подведения к нему (как ротору) тока, в отличие от двигателей постоянного тока или синхронных переменного.
Понятно, что мощность и КПД такого устройства чрезвычайно малы, а заменивший выключатель коллектор был чрезвычайно сложен.
Но до реализации идеи оставался только шаг. Он был сделан с развитием техники многофазных токов, которая, собственно, и появилась-то благодаря разработке электродвигателей переменного тока.
В 1888 г. итальянский физик Галилео Феррарис и изобретатель из Хорватии, работавший в США, Никола Тесла открыли явление вращающегося электромагнитного поля. Оно создаётся двумя или более неподвижными катушками, расположенными под углом друг к другу, в которых протекают одинаковые по величине, но сдвинутые друг относительно друга по фазе переменные токи. В результате возникает тот же эффект перемены магнитных полюсов (по кругу), которого добился в своем двигателе У. Бейли — но без всяких коммутаторов и скользящих контактов: перемагничиванием управляет сам ток.
На основе этого эффекта Н. Тесла сконструировал двухфазный асинхронный двигатель.
Чтобы получить двухфазный ток из однофазного, Н. Тесла построил генератор, который сразу давал два переменных тока с разностью фаз в четверть периода. В нём между полюсами магнита вращались две взаимно перпендикулярные катушки, и когда витки одной находились под полюсами и в них индуцировался максимальный ток, витки другой находились между полюсами и ЭДС в них была равна нулю — вот вам и сдвиг фаз на 90 . Трёхфазный ток можно получить аналогично, используя три катушки под углом 60 друг к другу.
В нём между полюсами магнита вращались две взаимно перпендикулярные катушки, и когда витки одной находились под полюсами и в них индуцировался максимальный ток, витки другой находились между полюсами и ЭДС в них была равна нулю — вот вам и сдвиг фаз на 90 . Трёхфазный ток можно получить аналогично, используя три катушки под углом 60 друг к другу.
Двигатель Тесла оказался лучше и надёжней всех существовавших. Обмотка статора была выполнена в виде катушек, насаженных на выступающие полюса, концы их выведены на кольца, расположенные на валу. Ротор — в виде барабана с двумя взаимно перпендикулярными, замкнутыми на себя катушками.
Кстати, Г. Феррарис тоже построил двухфазный двигатель с медным сплошным ротором и сосредоточенной обмоткой на статоре, мощностью в несколько ватт, КПД 50 %. Но сам считал идею неперспективной.
Между тем, уже в 1889 г. Вестингауз Электрик Компани выпустила в продажу первую партию электромоторов Тесла. Это ознаменовало начало новой эры в электротехнике.
А вскоре индукционный двигатель Теслы был значительно переработан и усовершенствован Михаилом Осиповичем Доливо Добровольским — об этом в следующем номере.
Асинхронный двухфазный двигатель 5M90GN-CF 220В/90Вт с редуктором 5GN3K 500 об/мин
Технические характеристики
- Модель: 51K90RGN-CF 500RPM
- Вес изделия: 4.45+0.21 кг
- Температура эксплуатации: -10°С … +50°С
- Электродвигатель
- Маркировка: 5M90GN-CF
- Рабочее напряжение: 220В АС, 50/60 Гц
- Потребляемый ток: 0.6 А
- Мощность, макс.: 90 Вт
- Режим работы: продолжительный
- Номинальная скорость вращения вала, об/мин: 1400/1700
- Направление вращения: по/против часовой стрелке (CW/CCW)
- Пусковой момент: 0.48 N.m
- Крутящий момент: 0.64 N.
 m
m - Механизм обратной связи
- Размер мотора: 90 х 90 х 152 мм (± 1мм)
- Дина соединительного шнура: 300 мм
- Редуктор
- Маркировка: 5GN3K
- Конструкция: цельнометаллический
- Расположение вала: параллельное
- Крутящий момент: 1.55 N.m / 50 Гц, 1.35 N.m / 60 Гц
- Соотношение: 1/3
- Обороты в минуту: 500 (433-566)
- Диаметр вала: 12 мм
- Вылет вала: 27 мм
- Размер редуктора с валом: 90 х 90 х 92 мм (± 1мм)
- Регулятор оборотов
- Маркировка: BS-51
- Рабочее напряжение: 220В АС, 50/60 Гц
- Диапазон регулировки, об/мин: 0-1400 / 50 Гц; 90-1700 / 60 Гц
- Максимальная мощность мотора: 90 Вт
- Размер регулятора: 100 х 60 х 115 мм (± 1мм)
- Дина соединительного шнура: 650 мм
 m
mПромышленный мотор-редуктор 51K90RGN-C 200RPM собран на базе двухфазного асинхронного двигателя, работающего в однофазных сетях переменного напряжения 220В 50/60Гц. На одной стороне двухстороннего вала установлен съёмный цельнометаллический параллельный редуктор, состоящий из нескольких ступеней шестерёнчатых передач с шарикоподшипниковой опорой. Редуктор влияет на изменение соотношений крутящего момента и скорости вращения между валом мотора и валом редуктора, снижая скорость и обеспечивая необходимое усилие на валу редуктора. С второй стороны вала закреплены металлические лопасти вентилятора, выполняющие функцию активного охлаждения корпуса двигателя. Механизм вентилятора накрыт защитным кожухом, в котором присутствует множество широких воздухозаборных отверстий, способствующих максимально свободной циркуляции воздушного потока при разностороннем вращении вала.
На одной стороне двухстороннего вала установлен съёмный цельнометаллический параллельный редуктор, состоящий из нескольких ступеней шестерёнчатых передач с шарикоподшипниковой опорой. Редуктор влияет на изменение соотношений крутящего момента и скорости вращения между валом мотора и валом редуктора, снижая скорость и обеспечивая необходимое усилие на валу редуктора. С второй стороны вала закреплены металлические лопасти вентилятора, выполняющие функцию активного охлаждения корпуса двигателя. Механизм вентилятора накрыт защитным кожухом, в котором присутствует множество широких воздухозаборных отверстий, способствующих максимально свободной циркуляции воздушного потока при разностороннем вращении вала.
Мотор-редуктор 51K90RGN-CF поддерживает схемы подключения, предусматривающие вращение вала по часовой стрелке (прямое направление, CW) или против часовой стрелки (реверсивное направление, CCW). В условиях автоматического или ручного управления, запрещается быстрая смена направления без полной остановки мотора.
В условиях автоматического или ручного управления, запрещается быстрая смена направления без полной остановки мотора.
Индивидуальное подключение двигателя 5M90GN-CF к силовой сети переменного напряжения
Конструкция статора двигателя 5M90GN-CF содержит две равнозначные обмотки для разгона (фазосдвигающая цепь) и постоянной работы двигателя, использующие метод вращающегося магнитного поля. Обмотки объединены между собой общим проводом — у двигателя выведены наружу три питающих провода. Выравниванием крутящего момента при вращении ротора асинхронного двухфазного электродвигателя должен заниматься пусковой конденсатор номиналом 5мкФ/450В, который необходимо самостоятельно включить в цепь питания. Установка конденсатора между независимыми выводами позволяет создать схему универсального управления, при котором можно переназначать роли для пусковой или рабочей обмоток, и выбирать таким образом направление вращения ротора. Пример подключения выводов обмоток мотора к силовой сети 220В:
Кроме проводов питания двигателя, к 6-контактному разъёму выведены линии обратной связи из пары белых тонких проводов, предназначенные для совместного использования с блоками управления, учитывающие скорость вращения вала.
Блок управления двигателем BS-51, регулировка оборотов
В комплектацию с мотором-редуктором переменного напряжения 5M90GN-CF входит регулятор оборотов BS-51 для двухфазных конденсаторных асинхронных двигателей мощностью не более 90Вт с 3-проводным подключением. Простые и интуитивно понятные элементы управления в виде поворотной ручки и двухпозиционного переключателя позволяют вручную запускать и останавливать двигатель, а также плавно регулировать скорость мотора в сторону ускорения или замедления. Для большей наглядности, на лицевую панель регулятора нанесена процентная шкала скорости мотора. Единственный светодиодный индикатор красного цвета отображает наличие напряжения в цепи питания. За установку направления вращения вала отвечает короткая проводная перемычка, связывающая соответствующие винтовые клеммы COM, CW и CCW. На продольной стороне корпуса регулятора расположено небольшое утопленное отверстие с подстроечным резистором. С его помощью корректируется отклонение фактической скорости от установленной.
С его помощью корректируется отклонение фактической скорости от установленной.
Подключение регулятора к мотору-редуктору освобождает от добавления в схему питания пускового конденсатора — он заведомо помещён внутрь корпуса. При соединении 6-контактных штекера регулятора и разъёма мотора, следует соблюдать назначение проводных линий. Производитель изделия настоятельно не рекомендует замыкать и размыкать контакты, находящиеся под рабочим напряжением.
Физические размеры, мм
Способ управления двухфазным электроприводом переменного тока с помощью трехфазного мостового инвертора
Предлагаемое изобретение относится к электротехнике, а именно к системам управления электроприводом переменного тока с двухфазным асинхронным двигателем, питающимся от преобразователя частоты с трехфазным мостовым инвертором.
Известен способ управления двухфазным конденсаторным двигателем, содержащим главную обмотку и вспомогательную обмотку с последовательно подключенным конденсатором, осуществляемый с помощью соединенного с обмотками двигателя трехфазного мостового инвертора с шестью ключевыми элементами, попарно соединенными между собой, в соответствие с которым к обмоткам двухфазного двигателя подводят переменные напряжения, сдвинутые по фазе друг относительно друга, причем один из пары соединенных между собой ключевых элементов удерживают в закрытом состоянии в течение изменения углового сдвига не менее 10°, предпочтительно от 35° до 100°, при этом открывают другой ключевой элемент из этой пары, а желаемый процесс изменения напряжения на обмотках двигателя выполняют посредством модуляции двух других пар ключевых элементов, при регулировании скорости вращения двигателя поддерживают угол сдвига фаз между токами в обмотках двигателя близкий к 90°, когда рабочие частоты превышают пороговое значение частоты, изменяют направление токов, протекающих через обмотки двигателя [1].
Недостатком данного способа управления двухфазным двигателем является сложность реализации большого диапазона регулирования угловой скорости двигателя, т.к. при изменении частоты необходимо регулировать не только напряжения, подводимые к обмоткам двигателя, но и напряжение на конденсаторе, а также сложный алгоритм управления ключевыми элементами, базирующийся на принципе широтно-импульсной модуляции (ШИМ). требующий большого количества вычислительных операций, выполняемых управляющим контроллером.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является способ управления трехфазным мостовым инвертором, питающим двухфазный асинхронный двигатель с постоянными магнитами, ключи инвертора модулируют постоянное напряжение на основе тактовых импульсов, имеющих заданный период тактового сигнала, переключение ключей инвертора осуществляют таким образом, что на каждую обмотку подают переменные напряжения, которые сдвинуты по фазе друг относительно друга на 90°, причем один ключ одной из пар удерживают непрерывно замкнутым в течение более одного такта для угла поворота не менее 25°, в то время как другой ключ этой пары оставляют непрерывно открытым, выполняют желаемое изменение мгновенных значений напряжений на каждой обмотке посредством модуляции двух других пар ключей [2].
Недостатком данного способа управления двухфазным двигателем является сложный алгоритм управления вентилями, базирующийся на принципе широтно-импульсной модуляции (ШИМ). требующий большого количества вычислительных операций, выполняемых управляющим контроллером.
Предложенный способ управления решает задачу обеспечения питания двухфазного асинхронного электродвигателя от преобразователя частоты, содержащего трехфазный мостовой инвертор, с использованием упрощенного алгоритма управления, что снижает требования к вычислительной мощности управляющего контроллера.
Для решения поставленной задачи применяется преобразователь частоты, который содержит мостовой выпрямитель, звено постоянного тока и инвертор напряжения, состоящий из шести полупроводниковых ключевых элементов (IGBT-транзисторов) и шести обратных диодов, разбитых на две группы (анодную и катодную) в трех плечах, то есть, применен типовой преобразователь частоты, обычно используемый для трехфазного электропривода. Средняя точка второго плеча инвертора подключена к объединенным первым выходам двух статорных обмоток асинхронного электродвигателя, а средние точки первого и третьего плеча — ко вторым отдельным выходам этих обмоток. Сигналы на переключение ключей инвертора подаются от релейного регулятора тока, на входе которого сравнивают заданное и измеренное значения токов на выходе преобразователя частоты. Коммутация ключей инвертора осуществляются в зависимости от текущего участка (одного из четырех) периода двух синусоид, определяемого по заданию, причем на каждом участке периода состояние части ключей определяется релейными регуляторами тока каждой фазы, часть ключей при этом остается на всем участке постоянно закрытыми, а часть — постоянно открытыми.
Средняя точка второго плеча инвертора подключена к объединенным первым выходам двух статорных обмоток асинхронного электродвигателя, а средние точки первого и третьего плеча — ко вторым отдельным выходам этих обмоток. Сигналы на переключение ключей инвертора подаются от релейного регулятора тока, на входе которого сравнивают заданное и измеренное значения токов на выходе преобразователя частоты. Коммутация ключей инвертора осуществляются в зависимости от текущего участка (одного из четырех) периода двух синусоид, определяемого по заданию, причем на каждом участке периода состояние части ключей определяется релейными регуляторами тока каждой фазы, часть ключей при этом остается на всем участке постоянно закрытыми, а часть — постоянно открытыми.
В данном изобретении используется типовая конструкция силовой части преобразователя частоты трехфазного электропривода, которая не требует дополнительных экономических затрат. Кроме того, использование такой конструкции позволяет уменьшить габариты данного устройства по сравнению с другими преобразователями частоты для двухфазного привода за счет уменьшения количества полупроводниковых элементов и как следствие, охлаждающих радиаторов для них. За счет уменьшения количества управляемых полупроводниковых элементов увеличивается и надежность стабильной работы устройства. Использование релейного регулятора тока позволит избежать сложностей при разработке алгоритма управления ШИМ или написания нового закона для ее формирования.
За счет уменьшения количества управляемых полупроводниковых элементов увеличивается и надежность стабильной работы устройства. Использование релейного регулятора тока позволит избежать сложностей при разработке алгоритма управления ШИМ или написания нового закона для ее формирования.
На фиг. 1 приведена схема устройства, реализующего предложенный способ управления двухфазным электроприводом, на фиг. 2 показан идеальный график токов в обмотках двухфазного двигателя, на фиг. 3 показаны контуры токов, протекающих через инвертор и обмотки статора при различных комбинациях ключей, на фиг. 4 — таблица всех возможных состояний ключей инвертора, на фиг. 5.-система управления, использованная при моделировании, на фиг. 6 — графики текущих значений токов статора на выходе преобразователя частоты, полученные при моделировании.
Преобразователь частоты, предназначенный для управления двухфазным асинхронным электродвигателем 1, состоит из нерегулируемого диодного трехфазного выпрямителя 2. звена постоянного тока с конденсатором 3 и инвертора напряжения 4, выполненного на IGВТ-транзисторах с обратными диодами. На выходе преобразователя частоты установлены датчики тока 5. Система управления инвертором 6 содержит блок релейных регуляторов тока каждой фазы 7. на входе которого установлен блок сравнения 8, на который поступают заданные и измеренные значения токов. Сигналы, формируемые блоком релейных регуляторов и им обратные, а также логические «0» и «1» поступают на драйвер инвертора 9, который по сигналам задания определяет текущий участок периода синусоид тока и формирует для каждого из четырех участков свою комбинацию состояний ключей инвертора 4 на основе заведенных логических сигналов.
звена постоянного тока с конденсатором 3 и инвертора напряжения 4, выполненного на IGВТ-транзисторах с обратными диодами. На выходе преобразователя частоты установлены датчики тока 5. Система управления инвертором 6 содержит блок релейных регуляторов тока каждой фазы 7. на входе которого установлен блок сравнения 8, на который поступают заданные и измеренные значения токов. Сигналы, формируемые блоком релейных регуляторов и им обратные, а также логические «0» и «1» поступают на драйвер инвертора 9, который по сигналам задания определяет текущий участок периода синусоид тока и формирует для каждого из четырех участков свою комбинацию состояний ключей инвертора 4 на основе заведенных логических сигналов.
Способ управления инвертором в данном устройстве осуществляется следующим способом.
График токов в обмотках двухфазного электродвигателя представляет собой две синусоиды, сдвинутые относительно друг друга на 90 электрических градусов (фиг. 2). В одном периоде графика выделяют четыре участка: I1>0, I2<0; I1≥0, I2≥0; I1<0, I2≥ 0; I1<0. I2<0. Данная форма служит заданием для системы управления.
I2<0. Данная форма служит заданием для системы управления.
На фиг. 3 сплошными линиями со стрелками показаны направления протекания токов статора от инвертора к обмоткам двигателя, а пунктирными линиями со стрелками-контуры протекания остаточных токов в обмотках при их отключении от сети.
На первом участке для сохранения знака, то есть направления, ток первой обмотки должен протекать от начала катушки к ее концу, то есть от первого плеча инвертора ко второму. Напротив, ток второй обмотки должен протекать от конца катушки к ее началу, то есть от третьего плеча ко второму. Таким образом, в начальный момент времени на первом участке периода должны быть открыты ключи VT1, VT4 и VT5, противофазные им ключи VT2. VT3 и VT6 должны быть закрыты. Токи в инверторе при этом протекают по замкнутым контурам «+»-VT1-L1-VT4-«-» и «+»-VT5-L2-VT4-«-» (фиг. 3 (а)). Когда на первой обмотке значение фактического тока оказывается выше верхней границы «коридора» задания, определяемого гистерезисным блоком, на этой обмотке ток должен начать уменьшаться до достижения им нижней границы. Для этого отключают ключ VT1.
Для этого отключают ключ VT1.
При этом контуры токов «+»-VT5-L2-VT4-«-» и L1-VT4-VD2 (фиг. 3 (б)). Аналогично в подобном случае для второй обмотки происходит отключение VT5 с наведением контура рассеяния L2-VT4-VD6 (фиг. 3 (в)). Возможен вариант с одновременным отключением VT1 и VT5 (фиг.3 (г)). При достижении нижней границы «коридора» задания происходит обратная коммутация.
Для второго участка характерны основные контуры «+»-VT1-L1-L2-VT6-«-» и «+»-VT3-L2-VT6-«-» (фиг. 3 (д)). При релейном регулировании происходят отключения VT1 (контуры «+»-VT3-L2-VT6-«-» и L1-L2- VT6-VD2) (фиг.3 (е)) и синхронные отключения VT3 и VT6 с включением VT4 (контуры «+»-VT1-L1-VT4-«-» и L2-VD5-VT1-L1) (фиг. 3 (ж)). При этом алгоритм коммутации обеспечивает блокировку одновременного срабатывания ключей VT3 и VT4. При одновременном отключении обоих обмоток все ключи открыты (фиг. 3 (з)). При достижении нижней границы «коридора» задания происходит обратная коммутация.
Алгоритм коммутации на третьем участке аналогичен алгоритму на первом, а на четвертом алгоритму на втором. На третьем участке в первый момент времени открыты ключи VT2, VT3 и VT6, при выходе из зоны могут замыкаться VT2 и VT6.
На третьем участке в первый момент времени открыты ключи VT2, VT3 и VT6, при выходе из зоны могут замыкаться VT2 и VT6.
На четвертом участке характерны основные контуры «+»-VT5-L2-L1-VT2-«-» и «+»-VT3-L1-VT2-«-». При релейном регулировании происходят отключения VT5 (контуры «+»-VT3-L1-VT2-«-» и L2-L1-VT2-VD6) и синхронные отключения VT2 и VT3 с включением VT4 (контуры «+»-VT5-L2-VT4-«-» и L1-VD1-VT5-L2). При одновременном отключении обоих обмоток все ключи открыты. Следующие четверть периода вновь действуют законы для первого участка, цикл алгоритма коммутации ключей инвертора повторяется, обеспечивая круговое вращение поля статора двигателя.
На фиг. 4. «1» означает включенный транзистор, а «0» — отключенный. Система управления (фиг.5) состоит из двух сумматоров, двух гистерезисных блоков, двух однопозиционных и четырех двухпозиционных компараторов, пяти логических элементов «И» и четырех логических «НЕ».
На однопозиционных компараторах сигналы задания, соответствующие идеальному графику токов в обмотках двухфазного двигателя (фиг. 2), сравниваются с нулем, а затем с помощью логических «НЕ» и «И» определяется номер текущего участка периода. Разницы заданных и измеренных токов подаются на релейные регуляторы, на выходе которых получают логические сигналы по функции гистерезиса. Эти сигналы, им обратные, а также логические «0» и «1» подаются на четыре блока регистров. Четыре двухпозиционных компаратора в зависимости от номера участка определяют, какой из регистров подается на ключи инвертора. Блокировка ключа VT4 для второго и четвертого участков реализована функцией «И» прямого гистерезиса первой обмотки и обратного второй. «0» и «1» подаются на ключи, которые должны быть постоянно разомкнутыми или замкнутыми на всем протяжении участка соответственно.
2), сравниваются с нулем, а затем с помощью логических «НЕ» и «И» определяется номер текущего участка периода. Разницы заданных и измеренных токов подаются на релейные регуляторы, на выходе которых получают логические сигналы по функции гистерезиса. Эти сигналы, им обратные, а также логические «0» и «1» подаются на четыре блока регистров. Четыре двухпозиционных компаратора в зависимости от номера участка определяют, какой из регистров подается на ключи инвертора. Блокировка ключа VT4 для второго и четвертого участков реализована функцией «И» прямого гистерезиса первой обмотки и обратного второй. «0» и «1» подаются на ключи, которые должны быть постоянно разомкнутыми или замкнутыми на всем протяжении участка соответственно.
Графики текущих значений токов статора на выходе преобразователя частоты представлены на фиг. 6. Можно отметить, что при работе системы управления по представленному алгоритму графики токов статора близки к идеальной форме.
Таким образом, с помощью трехфазного преобразователя частоты двухфазный асинхронный двигатель получает энергию от трехфазной сети с возможностью регулирования скорости вращения в широких пределах при использовании известной типовой конструкции силовой части устройства. Сама типовая конструкция позволяет проводить взаимозаменяемость деталей при ремонте. Предложенный способ управления может применяться как при скалярном, так и при векторном управлении электроприводом переменного тока.
Сама типовая конструкция позволяет проводить взаимозаменяемость деталей при ремонте. Предложенный способ управления может применяться как при скалярном, так и при векторном управлении электроприводом переменного тока.
Литература.
1. Патент WO 2004008623 А1. кл. Н02Р 1/44, 25/04. DANFOSS DRIVES A/S. Converter for rotational speed variable operation of a capacitor motor and method for controlling a capacitor motor, 22.01.2004.
2. Патент US 2008143284 A1. кл. H02P 6/08, 1/42. Henrik Kragh, Bjarne Henriksen. Two-phase permanent magnet motor, 19.06.2008.
Способ управления двухфазным электроприводом переменного тока с помощью трехфазного мостового инвертора, в соответствии с которым открывают и закрывают ключи инвертора, формируют из импульсов напряжений переменные двухфазные напряжения, сдвинутые по фазе относительно друг друга на 90°, и подают их на обмотки статора двухфазного двигателя, отличающийся тем, что задают желаемую периодическую кривую фазного тока в каждой из обмоток статора, устанавливают допустимый пороговый уровень отклонения мгновенных значений тока от заданного значения, измеряют значения тока в каждой из обмоток статора, определяют сигнал отклонения измеренного значения тока от заданного, при превышении которым порогового уровня переключают ключи инвертора и изменяют цепи протекания токов через обмотки двигателя, при этом формируют периодические кривые фазных токов, каждый из периодов которых составляют в виде последовательности четырех временных участков, при этом в течение первого временного участка ток пропускают от положительного выхода выпрямителя через открытый ключ анодной группы первого плеча инвертора к началу первой обмотки, а от ее конца через открытый ключ катодной группы второго плеча инвертора к отрицательному выходу выпрямителя и через открытый ключ анодной группы третьего плеча инвертора к концу второй обмотки, а от ее начала через открытый ключ катодной группы второго плеча инвертора к отрицательному выходу выпрямителя, в течение второго временного участка ток пропускают от положительного выхода выпрямителя через открытый ключ анодной группы первого плеча инвертора к началу первой обмотки, а от ее конца через вторую обмотку и открытый ключ катодной группы третьего плеча инвертора к отрицательному выходу выпрямителя и через открытый ключ анодной группы второго плеча к началу второй обмотки, а от ее конца через открытый ключ катодной группы третьего плеча инвертора к отрицательному выходу выпрямителя, в течение третьего временного участка ток пропускают от положительного выхода выпрямителя через открытый ключ анодной группы второго плеча инвертора к концу первой обмотки, а от ее начала через открытый ключ катодной группы первого плеча инвертора к отрицательному выходу выпрямителя и к началу второй обмотки, а от ее конца через открытый ключ катодной группы третьего плеча инвертора к отрицательному выходу выпрямителя, в течение четвертого временного участка ток пропускают от положительного выхода выпрямителя через открытый ключ анодной группы второго плеча инвертора к концу первой обмотки, а от ее начала через открытый ключ катодной группы первого плеча инвертора к отрицательному выходу выпрямителя и через открытый ключ анодной группы третьего плеча инвертора к концу второй обмотки, а от ее начала через первую обмотку и открытый ключ катодной группы первого плеча инвертора к отрицательному выходу выпрямителя.
Отличие синхронного от асинхронного двигателя кратко. Чем отличается синхронный двигатель от асинхронного? Двухфазный асинхронный двигатель с короткозамкнутым ротором
Электродвигатели можно разделить на две основные категории – синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях. Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези — пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
Принципиальным отличием между синхронными и асинхронными двигателями являются роторы, точнее, их исполнение.
У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Агрегаты используются на практике и как генераторы и как двигатели.
Асинхронные модели – это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой. Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
 Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).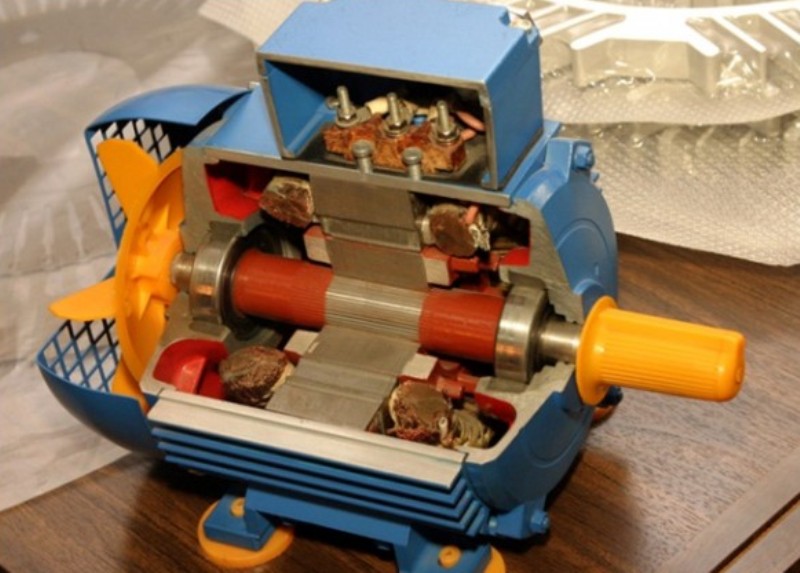
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.
Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым. Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного. Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит. Вращающийся магнит, создающий статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая. Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора. В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
Классификация электродвигателей
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Прежде чем разобраться, в чём их отличие, необходимо выяснить, что такое электродвигатель? Электродвигатель – это электрическая машина, которая приводится в действие от электроэнергии и служит приводом для других механизмов.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
Объяснение принципа работы асинхронного электродвигателя для «чайников»
Вспоминаем описание рисунка в предыдущем примере. Та же рамка, расположенная между полюсами подковообразного магнита, только её концы не имеют полуколец, они соединены между собой.
Теперь начинаем вращать вокруг рамки подковообразный магнит. Вращаем его медленно и наблюдаем за поведением рамки. До некоторых пор рамка остаётся неподвижной, а потом, при повороте магнита на определённый угол, рамка начинает вращение вслед за магнитом. Вращение рамки запаздывает по сравнению со скоростью вращения магнита, т.е. она вращается не синхронно с ним – асинхронно. Вот и получается, что это примитивный асинхронный электродвигатель.
Вообще-то роль магнитов в настоящем асинхронном двигателе служат обмотки, расположенные в пазах статора, на которые подаётся ток. А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.
А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.
В чём же отличия синхронного и асинхронного электродвигателей?
Если поставить рядом два современных электродвигателя одного и другого типа, то по внешним признакам их отличить трудно даже специалисту.
По существу, их главное отличие рассмотрено в приведённых примерах принципов работы этих электродвигателей. Они отличаются по конструкции роторов . Ротор синхронного электродвигателя состоит из обмоток, а ротор асинхронного представляет собой набор пластин.
Статоры одного и другого электродвигателей почти неотличимы и представляют собой набор обмоток, однако, статор синхронного электродвигателя может быть набран из постоянных магнитов.
Обороты синхронного двигателя соответствуют частоте подаваемого на него тока, а обороты асинхронного несколько отстают от частоты тока.
Отличаются они и по сферам применения . Например, синхронные электродвигатели ставят для привода оборудования, которое работает с постоянной скоростью вращения (насосы, компрессоры и т.д.) не снижая её с увеличением нагрузки. А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки.
Синхронные электродвигатели конструктивно сложней, а значит, и дороже асинхронных электродвигателей.
Современный электродвигатель — Экологические автомобили Экологические автомобили
Для большинства экологичных машин, таких как серийные электромобили, гибриды и автомобили на топливных элементах, главная движущая сила — это электрический двигатель. В основу работы современного электродвигателя положен принцип электромагнитной индукции — явления, связанного с возникновением электродвижущей силы в замкнутом контуре при изменении магнитного потока.
Тесная взаимосвязь между магнитными и электрическими явлениями открыла перед учеными новые возможности. История электрического транспорта и всего электромашиностроения в целом начинается с закона электромагнитной индукции, открытого М. Фарадеем в 1831 году, и правила Э. Ленца, согласно которому индукционный ток всегда направлен таким образом, чтобы противодействовать причине, его вызывающей. Труды Фарадея и Ленца легли в основу создания первого электродвигателя Бориса Якоби.
История электрического транспорта и всего электромашиностроения в целом начинается с закона электромагнитной индукции, открытого М. Фарадеем в 1831 году, и правила Э. Ленца, согласно которому индукционный ток всегда направлен таким образом, чтобы противодействовать причине, его вызывающей. Труды Фарадея и Ленца легли в основу создания первого электродвигателя Бориса Якоби.
Современные электродвигатели, хоть и основаны на одном и том же законе, что и электромеханический преобразователь Якоби, но существенно от него отличаются. Со временем электрические моторы стали мощнее, компактнее, кроме того, их КПД значительно вырос. Коэффициент полезного действия современного тягового электродвигателя может составлять 85-95 %. Для сравнения, максимальный КПД двигателя внутреннего сгорания без вспомогательных систем едва ли дотягивает до 45 %.
Виды современных электродвигателей
Электрические двигатели различаются по роду питающего напряжения:
- Двигатель переменного тока
- Двигатель постоянного тока
по числу фаз питающей сети:
- Однофазный электродвигатель. С одной рабочей обмоткой, подключается к однофазной сети переменного тока;
- Двухфазный электродвигатель. Имеет две обмотки, сдвинутые в пространстве на 90 градусов;
- Трехфазный электродвигатель. Подключается к трехфазной сети переменного тока, имеет 3 обмотки, магнитные поля которых расположены через 120 градусов.
 С одной рабочей обмоткой, подключается к однофазной сети переменного тока;
С одной рабочей обмоткой, подключается к однофазной сети переменного тока;по конструктивному исполнению:
- Коллекторный. Переключателем тока в обмотках и датчиком положения ротора является тоже самое устройство — щёточноколлекторный узел. Работает преимущественно на постоянном токе, однако современные электродвигатели, так называемые универсальные коллекторные двигатели, могут одновременно работать на постоянном и переменном токе;
- Бесколлекторный. Вентильные двигатели постоянного тока выполнены в виде замкнутой системы с датчиком положения ротора, инвертором и преобразователем координат.
по принципу работы:
- Синхронный электродвигатель. Электромеханическая машина, в которой ротор вращается синхронно с магнитным полем переменного тока;
- Асинхронный электродвигатель. Частота вращения ротора асинхронного двигателя переменного тока не совпадает с частотой вращения магнитного поля, которое создается током обмотки статора.
 Частота вращения ротора асинхронного двигателя переменного тока не совпадает с частотой вращения магнитного поля, которое создается током обмотки статора.
Частота вращения ротора асинхронного двигателя переменного тока не совпадает с частотой вращения магнитного поля, которое создается током обмотки статора.и по способу возбуждения:
- с возбуждением от постоянных магнитов;
- с параллельным возбуждением;
- с последовательным возбуждением;
- с последовательно-параллельным.
Тяговый электродвигатель для электромобиля
Электрический двигатель для современного электромобиля может быть как постоянного, так и переменного тока. Его основная задача — передача крутящего момента на движитель электромобиля. Основные отличия современного тягового электродвигателя от традиционной электромеханической машины являются большая мощность и компактные размеры, вызванные ограниченностью используемого пространства. В качестве характеристик тягового электромотора, кроме мощности и максимального крутящего момента, учитываются напряжение, ток, а также частота вращения.
Мотор-колесо
В последнее время в качестве двигателя для электромобиля инженеры используют систему мотор-колесо, правда, все чаще на концепт-карах. Исключением стал Volage – спортивный электромобиль, построенный силами Venturi и Michelin, который скоро поступит в продажу. Технология Active Wheel имеет ряд преимуществ. Все активные системы безопасности, такие как ABS, ESP, Brake Assist и Traction Control можно прошить в управляющий софт, после чего они смогут воздействовать на каждое колесо в отдельности. Добавим к этому мобильность системы и способность регенерировать энергию торможения.
Исключением стал Volage – спортивный электромобиль, построенный силами Venturi и Michelin, который скоро поступит в продажу. Технология Active Wheel имеет ряд преимуществ. Все активные системы безопасности, такие как ABS, ESP, Brake Assist и Traction Control можно прошить в управляющий софт, после чего они смогут воздействовать на каждое колесо в отдельности. Добавим к этому мобильность системы и способность регенерировать энергию торможения.
Конечно, есть и недостатки. Попробуйте впихнуть кучу механизмов внутрь маленького обода. Если это и получится, то вес колеса увеличится, а это плохо скажется на управляемости, повысится износ подвески, увеличится передача вибрации на кузов. Идеальный вес автомобильного колеса должен составлять 10-30 кг. Инженерам Michelin удалось вписаться в эти рамки – тяговый электродвигатель Active Wheel весит всего 7 кг, а остальная механика системы укладывается в 11 кг.
Преимущества и недостатки электродвигателя
Преимуществ перед ДВС у электродвигателя много:
- Малый вес и достаточно компактные размеры. К примеру инженеры Yasa Motors разработали мотор весом 25 кг, который может выдавать до 650 Нм.
- Долговечность, простая эксплуатация.
- Экологичность.
- Максимальный крутящий момент доступен уже с 0 об/мин.
- Высокий КПД.
- Нет необходимости в коробки передач. Хотя, по мнению специалистов, электромобилю она не помешает.
- Возможность рекуперации.
 К примеру инженеры Yasa Motors разработали мотор весом 25 кг, который может выдавать до 650 Нм.
К примеру инженеры Yasa Motors разработали мотор весом 25 кг, который может выдавать до 650 Нм.Существенных недостатков у самого электродвигателя нет. Но есть большие сложности в его питании. Несовершенство источников тока не дают пока что массово использовать электродвигатели в автомобилестроении. Но, как мы знаем, человеческий ум не любит преграды…
Трехфазные, двухфазные и однофазные двигатели — как они устроены, для чего используются
Основная идея однофазных и трехфазных электродвигателей довольно проста. Они преобразуют электрическую энергию в механическую, вращая вал. Это возможно благодаря использованию магнитного поля. Очевидно, что в зависимости от приложения необходимо использовать другое решение для запуска вращения.
Они преобразуют электрическую энергию в механическую, вращая вал. Это возможно благодаря использованию магнитного поля. Очевидно, что в зависимости от приложения необходимо использовать другое решение для запуска вращения.
Асинхронные трехфазные двигатели с короткозамкнутым ротором или с фазным ротором являются наиболее распространенными в промышленности. В основном это связано с их простой конструкцией, легкостью в эксплуатации и способностью достигать гораздо более высокой выходной мощности, чем у однофазных двигателей . Они используются в компрессорах, токарных станках, фрезерных станках и многих других устройствах.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель с короткозамкнутым ротором состоит из ротора и статора с зубьями и пазами.Обмотки вставляются в пазы. В случае ротора это алюминиевые или медные стержни, соединяющие два кольца вместе. Таким образом, они образуют форму клетки. Штанги, из которых состоит клетка, установлены под наклоном, что обеспечивает равномерное вращение. Асинхронные двигатели также называют асинхронными двигателями. Это связано с тем, что фактическая скорость двигателя всегда меньше его синхронной скорости.
Асинхронные двигатели также называют асинхронными двигателями. Это связано с тем, что фактическая скорость двигателя всегда меньше его синхронной скорости.
Трехфазные двигатели в предложении TME
Основными недостатками асинхронных асинхронных двигателей с короткозамкнутым ротором являются высокий пусковой ток и низкий пусковой момент.Асинхронные двигатели потребляют ток в пять-восемь раз больше номинального. Это вызывает нагрев обмоток, что является негативным явлением. Кроме того, такое высокое потребление тока может вызвать колебания напряжения в сети. По этой причине двигатели мощностью более 4 кВт нельзя даже подключать напрямую к сети. Поэтому можно использовать несколько способов запуска.
Один из них — использование пускателя со звезды на треугольник. Это означает, что во время пуска в течение определенного периода крутящий момент ниже, а напряжение на каждой обмотке равно фазному напряжению.Когда двигатель набирает скорость, переключатель звезда-треугольник меняет соединения обмоток, поэтому начало одной обмотки соединяется с концом другой, нейтральный провод не используется, и двигатель работает с номинальной мощностью.
Второй способ безопасного пуска асинхронного двигателя с короткозамкнутым ротором — это использование устройства «плавного пуска». Это электронная схема на тиристорах и симисторах, предназначенная для плавного увеличения напряжения, подаваемого на обмотки. В современных двигателях это решение предпочтительнее классического пускателя со звезды на треугольник.
Асинхронный двигатель с трехфазным ротором
Двигатель с фазным ротором — второй по популярности тип трехфазного двигателя. Его конструкция более сложная, что приводит к более высоким расходам, связанным с покупкой и использованием этого типа двигателя. В этом случае три обмотки соединяются звездой, т.е. аналогичные концы обмоток (обычно обозначаемые буквами U, V, W) соединяются с общей точкой. Остальные три конца (K, L, M) соединяются с контактными кольцами щетками.Концы этих обмоток выведены наружу, что позволяет подключать к обмоткам дополнительные цепи, обеспечивая, например, плавный пуск.
Асинхронные двигатели с фазным ротором можно запускать с помощью дополнительных резисторов на стороне ротора. Они позволяют снизить ток ротора и, следовательно, уменьшить потребление тока. Это решение используется все реже из-за дороговизны и сложности конструкции.
Они позволяют снизить ток ротора и, следовательно, уменьшить потребление тока. Это решение используется все реже из-за дороговизны и сложности конструкции.
Другое решение — использовать инвертор. Это решение тоже недешево, но открывает большие возможности.Это позволяет точно контролировать частоту вращения двигателя. Инверторы также используются с асинхронными двигателями с короткозамкнутым ротором, что означает, что более дорогие двигатели с фазным ротором становятся менее распространенными.
Для запуска двигателя необходимо создать вращающееся магнитное поле. Трехфазный двигатель создает вращающееся магнитное поле. Это возможно из-за сдвига фазы на 120 градусов. Иначе обстоит дело с однофазными двигателями. Вам необходимо создать фазовый сдвиг для запуска.
Однофазный двигатель
Однофазные двигатели редко используются в промышленности, но обычно используются в домашнем хозяйстве, например, в бытовых приборах или электроинструментах. Это связано с тем, что большинству этих устройств не требуется слишком много энергии и они должны быть простыми в использовании. Поэтому они должны работать, когда они подключены к обычной электрической розетке, без необходимости в трехфазном электроснабжении. Однофазные двигатели обычно обеспечивают мощность примерно до 2 кВт, чего достаточно для большинства бытовых приборов.
Это связано с тем, что большинству этих устройств не требуется слишком много энергии и они должны быть простыми в использовании. Поэтому они должны работать, когда они подключены к обычной электрической розетке, без необходимости в трехфазном электроснабжении. Однофазные двигатели обычно обеспечивают мощность примерно до 2 кВт, чего достаточно для большинства бытовых приборов.
Однофазные двигатели доступны в TME
Как запустить однофазный двигатель?
Однофазный двигатель имеет конструкцию, аналогичную конструкции трехфазного двигателя . Однако, поскольку он имеет только одну обмотку, вращающееся магнитное поле не создается при приложении напряжения, и, следовательно, ротор не перемещается. Однако, если вы переместите вал двигателя, он будет вращаться сам по себе. С другой стороны, перемещение вала вручную небезопасно и не удобно. Поэтому для запуска используются конденсатор , конденсатор и дополнительная обмотка, так называемая пусковая обмотка. Чаще всего смещен на 90 градусов от основной обмотки. Пусковая обмотка используется только для запуска двигателя. Когда двигатель достигает своей номинальной скорости, его необходимо отключить. В противном случае он перегреется и перегорит.
Чаще всего смещен на 90 градусов от основной обмотки. Пусковая обмотка используется только для запуска двигателя. Когда двигатель достигает своей номинальной скорости, его необходимо отключить. В противном случае он перегреется и перегорит.
Двухфазный двигатель
Очень редкий тип электродвигателя — двухфазный асинхронный двигатель . Когда-то они встречались в промышленных растворах, хотя и там были редкостью. В настоящее время они практически не используются и считаются диковинками.Двухфазные двигатели сконструированы аналогично однофазным двигателям и работают по аналогичным принципам. Основное отличие состоит в том, что роль пусковой обмотки, которая встречается в однофазных двигателях, выполняет обмотка, симметричная основной, смещенная на 90 градусов. Чтобы получить фазовый сдвиг, близкий к 90 градусам, необходимо, как и в однофазных двигателях , использовать конденсатор с правильным значением емкости. Кроме того, требуется двухфазная система, что непрактично — большинство нагрузок питаются от однофазных или трехфазных источников. По этой причине двухфазные двигатели были не очень распространены. Сейчас они практически полностью заменены одно- и трехфазными двигателями, которые гораздо более практичны и универсальны.
По этой причине двухфазные двигатели были не очень распространены. Сейчас они практически полностью заменены одно- и трехфазными двигателями, которые гораздо более практичны и универсальны.
Однофазные и трехфазные двигатели имеют очень широкий спектр применения и, следовательно, имеют разные параметры. Чтобы найти двигатель, подходящий для вашего проекта, ознакомьтесь с линейкой однофазных и трехфазных электродвигателей TME. Благодаря нашему широкому ассортименту продукции вы можете легко найти двигатель для промышленной и бытовой техники.Наше предложение адресовано как индивидуальным, так и корпоративным клиентам, поэтому в нашем ассортименте вы обязательно найдете то, что ищете.
Одно- и двухфазные двигатели
В этом разделе рассматриваются однофазные двигатели. Сосредоточившись на индукции
двигатели, реактивные синхронные, гистерезисные и асинхронные двигатели с расщепленными полюсами
также обсуждаются. Обратите внимание, что еще один распространенный однофазный двигатель, серия
универсальный двигатель, обсуждается в разделе 7.10. Большинство асинхронных двигателей дробных киловатт
(дробная мощность) — однофазные двигатели. В жилых и
коммерческого применения, они используются в широком спектре оборудования, включая
холодильники, кондиционеры и тепловые насосы, вентиляторы, насосы, стиральные машины и
сушилки.
Обратите внимание, что еще один распространенный однофазный двигатель, серия
универсальный двигатель, обсуждается в разделе 7.10. Большинство асинхронных двигателей дробных киловатт
(дробная мощность) — однофазные двигатели. В жилых и
коммерческого применения, они используются в широком спектре оборудования, включая
холодильники, кондиционеры и тепловые насосы, вентиляторы, насосы, стиральные машины и
сушилки.
В этом разделе мы качественно опишем эти двигатели с точки зрения
теории вращающегося поля и начнем со строгого анализа однофазного
двигатель, работающий от одной обмотки.Однако большинство однофазных индукционных
двигатели фактически являются двухфазными двигателями с несимметричными обмотками; два
обмотки обычно совершенно разные, с разным числом витков
и / или распределения обмоток. Таким образом, в этом разделе также обсуждается двухфазная
двигателей и включает развитие количественной теории для анализа
однофазных асинхронных двигателей при работе как от их основного, так и
вспомогательные обмотки.
1. ОДНОФАЗНЫЕ ИНДУКЦИОННЫЕ ДВИГАТЕЛИ: КАЧЕСТВЕННЫЙ ИССЛЕДОВАНИЕ
РИС.1 Схематический вид однофазного асинхронного двигателя.
Конструктивно наиболее распространенные типы однофазных асинхронных двигателей напоминают многофазные двигатели с короткозамкнутым ротором, за исключением расположения статора обмотки.
Асинхронный двигатель с короткозамкнутым ротором и однофазным статором
обмотка схематично представлена на фиг. 1. Вместо того, чтобы быть сосредоточенным
катушки, фактическая обмотка статора распределена в пазах для получения приблизительно
синусоидальное пространственное распределение ммс.Как мы видели в разделе
4.5.1, однофазный
намотка производит равные волны ммф, вращающиеся вперед и назад. По симметрии
Понятно, что такой двигатель по своей природе не будет производить пусковой крутящий момент
так как в состоянии покоя он будет производить равный крутящий момент в обоих направлениях. Тем не мение,
покажем, что если его запустить вспомогательными средствами, то результат будет
чистый крутящий момент в том направлении, в котором он запущен, и, следовательно, двигатель
будет продолжать работать.
Прежде чем рассматривать вспомогательные способы запуска, обсудим основные свойства схематического двигателя по фиг.1. Если ток статора косинусоидальная функция времени, результирующий воздушный зазор mmf определяется формулой. 4,18
(уравнение 1)
, который, как показано в разделе 4.5.1, можно записать как сумму положительных и отрицательно бегущие ММЖ-волны равной величины. Позитивное путешествие волна задается
(уравнение 2)
, а бегущая с отрицательной волной волна —
(уравнение 3)
Каждая из этих составляющих ММЧ-волн вызывает работу асинхронного двигателя, но
соответствующие крутящие моменты направлены в противоположные стороны.С ротором на
покой, прямые и обратные волны потока в воздушном зазоре, создаваемые комбинированными
ммс токов статора и ротора равны, составляющие крутящие моменты
равны, и пусковой крутящий момент не создается. Если вперед и назад
волны потока в воздушном зазоре должны были оставаться равными при вращении ротора, каждая из
поля компонентов будут давать характеристику крутящего момента-скорости, аналогичную
к таковому многофазного двигателя с пренебрежимо малым сопротивлением утечки статора, так как
проиллюстрированные пунктирными кривыми f и b на фиг. 2а. Результирующий крутящий момент-скорость
характеристика, которая представляет собой алгебраическую сумму двух компонентных кривых,
показывает, что если бы двигатель запускался вспомогательными средствами, он произвел бы
крутящий момент в любом направлении, в котором он был запущен.
2а. Результирующий крутящий момент-скорость
характеристика, которая представляет собой алгебраическую сумму двух компонентных кривых,
показывает, что если бы двигатель запускался вспомогательными средствами, он произвел бы
крутящий момент в любом направлении, в котором он был запущен.
РИС. 2 Характеристики крутящего момента однофазного асинхронного двигателя
(а) на основе постоянных прямых и обратных потоков магнитных волн, (б) принимая
учесть изменения потоковых волн.
Предположение, что волны потока в воздушном зазоре остаются равными, когда ротор
в движении — это довольно резкое упрощение реального положения дел.Во-первых, игнорируется влияние сопротивления утечки статора. Во-вторых,
эффекты индуцированных токов ротора должным образом не учитываются. Оба эти
эффекты будут в конечном итоге включены в подробную количественную теорию
Раздела 3. Следующее качественное объяснение показывает, что производительность
однофазного асинхронного двигателя значительно лучше, чем можно было бы предположить
на основе равных прямых и обратных потоковых волн.
Когда ротор находится в движении, составляющие токи ротора, индуцируемые обратное поле больше, чем в состоянии покоя, а их коэффициент мощности равен ниже.Их ммф,
подробная количественная теория разд. 3. Следующие качественные объяснение показывает, что производительность однофазного асинхронного двигателя значительно лучше, чем можно было бы предположить на основе равного форварда и волны обратного потока.
Когда ротор находится в движении, составляющие токи ротора, индуцируемые
обратное поле больше, чем в состоянии покоя, а их коэффициент мощности равен
ниже. Их mmf, который противодействует току статора, приводит к
уменьшение обратной магнитной волны.И наоборот, магнитный эффект
токи компонентов, индуцированные прямым полем, меньше, чем в состоянии покоя
потому что токи ротора меньше, а их коэффициент мощности выше. В качестве
скорость увеличивается, следовательно, прямая магнитная волна увеличивается, а обратная
поток волны уменьшается. Сумма этих потоковых волн должна оставаться примерно постоянной. поскольку он должен индуцировать противоэдс статора, которая приблизительно постоянна
если падение напряжения в сопротивлении утечки статора невелико.
поскольку он должен индуцировать противоэдс статора, которая приблизительно постоянна
если падение напряжения в сопротивлении утечки статора невелико.
Следовательно, при вращающемся роторе крутящий момент переднего поля больше и поле обратного поля меньше, чем на фиг. 2а, истинная ситуация примерно так, как показано на фиг. 2b. В нормальном режиме бега на нескольких процент скольжения, переднее поле в несколько раз больше заднего поле, а магнитная волна не сильно отличается от постоянной амплитуды вращающееся поле в воздушном зазоре уравновешенного многофазного двигателя. В нормальном рабочей области, следовательно, характеристика крутящего момента однофазного двигатель не слишком уступает многофазному двигателю, имеющему тот же ротор и работает с той же максимальной плотностью магнитного потока в воздушном зазоре.
В дополнение к крутящим моментам, показанным на РИС. 2, крутящий момент с двойной частотой статора
пульсации создаются взаимодействием встречно вращающегося потока
и миллиметровые волны, которые вращаются друг вокруг друга с удвоенной синхронной скоростью. Эти
взаимодействия не производят среднего крутящего момента, но они, как правило, заставляют двигатель
шумнее, чем у многофазного двигателя. Такие пульсации крутящего момента неизбежны в
однофазный двигатель из-за пульсаций мгновенной потребляемой мощности
присущие однофазной цепи.Эффекты пульсирующего крутящего момента
можно свести к минимуму за счет использования эластичного крепления двигателя.
Эти
взаимодействия не производят среднего крутящего момента, но они, как правило, заставляют двигатель
шумнее, чем у многофазного двигателя. Такие пульсации крутящего момента неизбежны в
однофазный двигатель из-за пульсаций мгновенной потребляемой мощности
присущие однофазной цепи.Эффекты пульсирующего крутящего момента
можно свести к минимуму за счет использования эластичного крепления двигателя.
Крутящий момент, указанный на кривых крутящего момента однофазного двигателя. — среднее по времени мгновенное значение крутящего момента.
2. ПУСК И РАБОТА ОДНОФАЗНОЙ ИНДУКЦИИ И СИНХРОННОЙ РАБОТЫ МОТОРЫ
Однофазные асинхронные двигатели классифицируются в зависимости от их пуска.
методы и обычно называются именами, описывающими эти методы.Выбор подходящего двигателя зависит от пускового и рабочего крутящего момента.
требования к нагрузке, рабочий цикл нагрузки и ограничения
о пусковом и рабочем токе от питающей сети двигателя. В
стоимость однофазных двигателей увеличивается вместе с их номиналом и производительностью. такие характеристики, как отношение пускового момента к току. Обычно в
Чтобы свести к минимуму затраты, инженер по применению выберет двигатель с
самый низкий рейтинг и производительность, которые могут соответствовать спецификациям
заявление.Когда большое количество двигателей должно использоваться для определенного
По назначению может быть разработан специальный двигатель, обеспечивающий наименьшую стоимость.
В сфере производства двигателей с дробными киловаттами небольшая разница в стоимости
важный.
такие характеристики, как отношение пускового момента к току. Обычно в
Чтобы свести к минимуму затраты, инженер по применению выберет двигатель с
самый низкий рейтинг и производительность, которые могут соответствовать спецификациям
заявление.Когда большое количество двигателей должно использоваться для определенного
По назначению может быть разработан специальный двигатель, обеспечивающий наименьшую стоимость.
В сфере производства двигателей с дробными киловаттами небольшая разница в стоимости
важный.
Рассмотрены способы пуска и полученные характеристики крутящего момента. качественно в этом разделе. Количественная теория для анализа этих моторы развиты в разд. 4.2.
РИС. 3 Двухфазный двигатель: (а) соединения, (б) векторная диаграмма при пуске,
и (c) типичная характеристика крутящего момента-скорости.
2.1 Двухфазные двигатели
Двухфазные двигатели имеют две обмотки статора, главную обмотку (также называемую
как обмотка хода), которую мы будем называть индексом main
и вспомогательная обмотка (также называемая пусковой обмоткой), которая
мы будем ссылаться на него с нижним индексом «aux». Как и в двухфазном двигателе,
оси этих обмоток смещены в пространстве на 90 электрических градусов, и
они соединены, как показано на фиг. 3а. Вспомогательная обмотка имеет более высокую
отношение сопротивления к реактивному сопротивлению, чем у основной обмотки, в результате чего
два тока будут не в фазе, как показано на векторной диаграмме
фиг.3b, который представляет условия при запуске. Поскольку
ток вспомогательной обмотки I_aux опережает ток основной обмотки I_main,
Поле статора сначала достигает максимума вдоль оси вспомогательной обмотки.
а затем несколько позже по времени достигает максимума по оси
основная обмотка.
Как и в двухфазном двигателе,
оси этих обмоток смещены в пространстве на 90 электрических градусов, и
они соединены, как показано на фиг. 3а. Вспомогательная обмотка имеет более высокую
отношение сопротивления к реактивному сопротивлению, чем у основной обмотки, в результате чего
два тока будут не в фазе, как показано на векторной диаграмме
фиг.3b, который представляет условия при запуске. Поскольку
ток вспомогательной обмотки I_aux опережает ток основной обмотки I_main,
Поле статора сначала достигает максимума вдоль оси вспомогательной обмотки.
а затем несколько позже по времени достигает максимума по оси
основная обмотка.
Токи в обмотках эквивалентны несимметричным двухфазным токам, и
двигатель эквивалентен неуравновешенному двухфазному двигателю. Результат
вращающееся поле статора, вызывающее запуск двигателя.После мотора
запускается, отключается вспомогательная обмотка, обычно с помощью центробежного
переключатель, который работает примерно на 75% синхронной скорости. Простой
способ получения высокого отношения сопротивления к реактивному сопротивлению вспомогательной обмотки
— намотать его проволокой меньшего размера, чем основная обмотка, допустимая процедура
потому что эта обмотка работает только при пуске. Его реактивное сопротивление может быть
несколько уменьшили, поместив его в верхние части прорезей. Типичный крутящий момент-скорость
характеристика такого двигателя показана на фиг.3c.
Его реактивное сопротивление может быть
несколько уменьшили, поместив его в верхние части прорезей. Типичный крутящий момент-скорость
характеристика такого двигателя показана на фиг.3c.
Электродвигатели с разделенной фазой имеют умеренный пусковой момент при низком пусковом токе. Типичные области применения включают вентиляторы, воздуходувки, центробежные насосы и офисные помещения. оборудование. Типичные значения от 50 до 500 Вт; в этом диапазоне они доступные двигатели с самой низкой стоимостью.
2,2 Конденсаторные двигатели
РИС. 4 Двигатель с конденсаторным пуском: (а) соединения, (б) векторная диаграмма на
пуск, и (c) типичная характеристика крутящего момента-скорости.
могут использоваться для улучшения пусковых характеристик двигателя, рабочих характеристик,
или и то, и другое, в зависимости от размера и подключения конденсатора. Конденсатор-старт
электродвигатель также является электродвигателем с расщепленной фазой, но смещение фазы по времени между
два тока получаются с помощью конденсатора, включенного последовательно с
вспомогательная обмотка, как показано на фиг. 4а. Снова вспомогательная обмотка
отключается после запуска двигателя, и, следовательно, вспомогательный
обмотка и конденсатор могут быть спроектированы с минимальными затратами для работы в прерывистом режиме.
4а. Снова вспомогательная обмотка
отключается после запуска двигателя, и, следовательно, вспомогательный
обмотка и конденсатор могут быть спроектированы с минимальными затратами для работы в прерывистом режиме.
При использовании пускового конденсатора соответствующей емкости вспомогательная обмотка ток I aux в состоянии покоя можно сделать так, чтобы он управлял током основной обмотки. Я подключаюсь на 90 электрических градусов, как в сбалансированном двухфазном двигателе. (см. фиг. 4b). На практике лучший компромисс между пусковым моментом, пусковой ток и стоимость обычно зависят от угла сдвига фаз. менее 90 °. Типичная характеристика крутящего момента-скорости показана на фиг. 4c, выдающейся особенностью является высокий пусковой крутящий момент.Эти двигатели используются для компрессоров, насосов, холодильного оборудования и оборудования для кондиционирования воздуха, а также другие трудно запускаемые нагрузки. Конденсаторный двигатель в разрезе показанный на фиг. 5.
В двигателе с постоянным разделением конденсаторов конденсатор и вспомогательная обмотка
не вырезаются после запуска; конструкция может быть упрощена пропуском
переключателя, а также улучшились коэффициент мощности, КПД и пульсации крутящего момента. Например, конденсатор и вспомогательная обмотка могут быть спроектированы для идеального
двухфазный режим (т.е.е., отсутствие обратной магнитной волны) при любой желаемой нагрузке.
Потери из-за обратного поля в этой рабочей точке тогда будут
должны быть устранены, что приведет к повышению эффективности. Двойная частота статора
пульсации крутящего момента также были бы устранены, с конденсатором, служащим в качестве
резервуар для хранения энергии для сглаживания пульсаций потребляемой мощности
от однофазной сети, что приводит к более тихой работе.
Например, конденсатор и вспомогательная обмотка могут быть спроектированы для идеального
двухфазный режим (т.е.е., отсутствие обратной магнитной волны) при любой желаемой нагрузке.
Потери из-за обратного поля в этой рабочей точке тогда будут
должны быть устранены, что приведет к повышению эффективности. Двойная частота статора
пульсации крутящего момента также были бы устранены, с конденсатором, служащим в качестве
резервуар для хранения энергии для сглаживания пульсаций потребляемой мощности
от однофазной сети, что приводит к более тихой работе.
Пусковым моментом нужно пожертвовать, потому что выбор емкости обязательно компромисс между лучшими начальными и рабочими значениями.В даны результирующая характеристика крутящего момента-скорости и принципиальная схема. на фиг. 6.
РИС. 5 Асинхронный двигатель с конденсаторным пуском в разрезе.
Пусковой выключатель находится справа от ротора. Мотор каплезащищенный строительство.
РИС. 6 Двигатель с постоянным разделением конденсаторов и типовая характеристика крутящего момента.
РИС. 7 Конденсаторный пуск, двигатель с конденсаторным питанием и типичная скорость крутящего момента
характерная черта.
Если используются два конденсатора, один для запуска и один для работы, теоретически могут быть достигнуты оптимальные пусковые и эксплуатационные характеристики. Один способ достижение этого результата показано на фиг. 7а. Малое значение емкости необходим для оптимальных условий работы постоянно подключен последовательно со вспомогательной обмоткой, и гораздо большее значение, необходимое для запуска получается конденсатором, подключенным параллельно рабочему конденсатору через переключатель с размыкается, когда двигатель набирает обороты.Такой мотор известный как конденсаторный двигатель с конденсаторным запуском.
Конденсатор для двигателя с конденсаторным пуском имеет типичное значение 300 #F.
для мотора мощностью 500 Вт. Поскольку он должен проводить ток только в течение времени пуска,
Конденсатор представляет собой специальный компактный электролитический конденсатор переменного тока, предназначенный для запуска двигателей. долг. Конденсатор для того же постоянно подключенного двигателя имеет типичную
рейтинг 40 #E, и поскольку он работает непрерывно, конденсатор является
бумага переменного тока, фольга и масло.Стоимость различных типов двигателей связана с
к производительности: двигатель с конденсаторным пуском имеет самую низкую стоимость, конденсатор с постоянным разделением
двигатель следующий, и конденсаторный запуск, двигатель с конденсатором самой высокой стоимости.
долг. Конденсатор для того же постоянно подключенного двигателя имеет типичную
рейтинг 40 #E, и поскольку он работает непрерывно, конденсатор является
бумага переменного тока, фольга и масло.Стоимость различных типов двигателей связана с
к производительности: двигатель с конденсаторным пуском имеет самую низкую стоимость, конденсатор с постоянным разделением
двигатель следующий, и конденсаторный запуск, двигатель с конденсатором самой высокой стоимости.
——————
Практическая задача 1
Рассмотрим двигатель из Примера 1. Найдите фазовый угол между основными и токи вспомогательной обмотки при замене конденсатора емкостью 177 мкФ на конденсатор емкостью 200 мкФ.
Решение
85.2 °
—————-
2,3 Асинхронные двигатели с экранированными полюсами
Как схематично показано на фиг. 8а, асинхронный двигатель с экранированными полюсами
обычно имеет выступающие полюса с одной частью каждого полюса, окруженной
короткозамкнутый виток меди называется затеняющей катушкой. Наведенные токи в
затеняющая катушка вызывает отставание потока в затененной части полюса
флюс в другой части. Результат похож на вращающееся поле
движение в направлении от незатененного к затемненному участку столба;
в короткозамкнутом роторе индуцируются токи и низкий пусковой крутящий момент
производится.Типичная характеристика крутящего момента-скорости показана на фиг. 8b.
Их эффективность невысока, но двигатели с расщепленными полюсами являются наименее дорогими.
тип субфракционного киловаттного двигателя. Их можно найти в рейтингах примерно до
50 Вт.
Наведенные токи в
затеняющая катушка вызывает отставание потока в затененной части полюса
флюс в другой части. Результат похож на вращающееся поле
движение в направлении от незатененного к затемненному участку столба;
в короткозамкнутом роторе индуцируются токи и низкий пусковой крутящий момент
производится.Типичная характеристика крутящего момента-скорости показана на фиг. 8b.
Их эффективность невысока, но двигатели с расщепленными полюсами являются наименее дорогими.
тип субфракционного киловаттного двигателя. Их можно найти в рейтингах примерно до
50 Вт.
РИС. 8 Асинхронный двигатель с расщепленными полюсами и типичная характеристика крутящего момента.
РИС. 9 Пробивка ротора для четырехполюсного синхронно-реактивного двигателя и
типичная характеристика крутящий момент-скорость.
2,4 Самозапускающиеся синхронно-реактивные двигатели
Любой из типов асинхронных двигателей, описанных выше, может быть преобразован в
самозапускающийся синхронно-реактивный двигатель. Все, что вызывает сопротивление
воздушного зазора в зависимости от углового положения ротора относительно
к оси обмотки статора будет создавать реактивный момент, когда ротор
вращающийся с синхронной скоростью. Например, предположим, что некоторые зубы
снимается с ротора с короткозамкнутым ротором, оставляя стержни и концевые элементы неповрежденными,
как в обычном асинхронном двигателе с короткозамкнутым ротором. ИНЖИР. 9а показано ламинирование
для такого ротора рассчитан на использование с четырехполюсным статором. Статор может
быть многофазным или любым из однофазных типов, описанных выше.
Все, что вызывает сопротивление
воздушного зазора в зависимости от углового положения ротора относительно
к оси обмотки статора будет создавать реактивный момент, когда ротор
вращающийся с синхронной скоростью. Например, предположим, что некоторые зубы
снимается с ротора с короткозамкнутым ротором, оставляя стержни и концевые элементы неповрежденными,
как в обычном асинхронном двигателе с короткозамкнутым ротором. ИНЖИР. 9а показано ламинирование
для такого ротора рассчитан на использование с четырехполюсным статором. Статор может
быть многофазным или любым из однофазных типов, описанных выше.
Двигатель запускается как асинхронный и при малых нагрузках будет увеличивать скорость.
до небольшого значения скольжения. Момент сопротивления возникает из-за тенденции
ротора, чтобы попытаться выровнять себя в положении минимального сопротивления с
относительно синхронно вращающейся прямой волны магнитного потока в воздушном зазоре, в соответствии с
с принципами, обсуждаемыми в разделе 3. При небольшом скольжении этот крутящий момент
медленно чередуется по направлению; ротор ускоряется во время положительного
полупериод изменения крутящего момента и замедление во время последующего
отрицательный полупериод.Если момент инерции ротора и его механический
нагрузка достаточно мала, ротор будет ускоряться от скорости скольжения
до синхронной скорости в течение ускоряющего полупериода реактивного сопротивления
крутящий момент.
При небольшом скольжении этот крутящий момент
медленно чередуется по направлению; ротор ускоряется во время положительного
полупериод изменения крутящего момента и замедление во время последующего
отрицательный полупериод.Если момент инерции ротора и его механический
нагрузка достаточно мала, ротор будет ускоряться от скорости скольжения
до синхронной скорости в течение ускоряющего полупериода реактивного сопротивления
крутящий момент.
Ротор будет синхронизирован и продолжит работу в синхронном режиме. скорость.
Наличие любой вращающейся в обратном направлении волны магнитного потока статора будет создавать крутящий момент. пульсация и дополнительные потери, но синхронная работа будет сохранена при условии, что момент нагрузки не является чрезмерным.
Типичная характеристика крутящего момента-скорости для синхронно-реактивного запуска с разделением фаз
двигатель показан на фиг. 9b. Обратите внимание на высокие значения крутящего момента асинхронного двигателя.
Причина этого в том, что для получения удовлетворительного синхронного двигателя
характеристик, было сочтено необходимым построить синхронно-реактивную
двигатели в корпусах, подходящих для асинхронных двигателей с двумя или
в три раза больше, чем у синхронного двигателя. Также обратите внимание, что главный
влияние явнополюсного ротора на характеристики асинхронного двигателя
в состоянии покоя, где очевидна значительная «зубчатость»; я.е.,
крутящий момент значительно зависит от положения ротора.
Также обратите внимание, что главный
влияние явнополюсного ротора на характеристики асинхронного двигателя
в состоянии покоя, где очевидна значительная «зубчатость»; я.е.,
крутящий момент значительно зависит от положения ротора.
2,5 Гистерезисные двигатели
Явление гистерезиса можно использовать для создания механического крутящего момента.
В простейшем виде ротор гистерезисного двигателя представляет собой гладкий цилиндр.
из магнитотвердой стали, без обмоток и зубцов. Он находится внутри
статор с прорезями, несущий распределенные обмотки, предназначенный для производства почти
как можно более синусоидальное пространственное распределение потока, так как волнистости в
волна потока значительно увеличивает потери.В однофазных двигателях статор
обмотки обычно относятся к типу с постоянными разделенными конденсаторами, как на фиг. 6.
Конденсатор выбран так, чтобы в результате получался примерно сбалансированный двухфазный ток.
условия в обмотках двигателя. Затем статор производит в первую очередь
поле воздушного зазора фундаментального пространства вращается с синхронной скоростью.
Затем статор производит в первую очередь
поле воздушного зазора фундаментального пространства вращается с синхронной скоростью.
РИС. 10 (а) Общий характер магнитного поля в воздушном зазоре и
ротор гистерезисного двигателя; (б) идеализированная характеристика крутящего момента-скорости.
Отображаются мгновенные магнитные условия в воздушном зазоре и роторе. на фиг. 10а для двухполюсного статора. Ось S S ‘волны статора-ммс вращается с синхронной скоростью. Из-за гистерезиса намагниченность ротора отстает от индуцирующей ММП-волны, поэтому ось R R ‘волны магнитного потока ротора отстает от оси статор-ммс волны на величину гистерезисный угол запаздывания 6 (фиг. 10а). Если ротор неподвижен, запускается крутящий момент создается пропорционально произведению основных компонентов статора mmf и потока ротора и синуса угла крутящего момента 6.В ротор затем ускоряется, если крутящий момент нагрузки меньше развиваемого крутящий момент мотора.
Пока ротор вращается со скоростью ниже синхронной, каждая область
ротора подвергается повторяющемуся гистерезисному циклу на частоте скольжения. Во время разгона ротора угол запаздывания 6 остается постоянным, если поток
постоянна, так как угол 6 зависит только от петли гистерезиса
материал ротора и не зависит от скорости прохождения петли.Таким образом, двигатель развивает постоянный крутящий момент вплоть до синхронной скорости,
как показано на идеализированной характеристике крутящий момент-скорость на фиг. 10б. Этот
Особенность — одно из преимуществ гистерезисного двигателя. По сравнению с
реактивный двигатель, который должен синхронизировать свою нагрузку
из характеристики крутящего момента асинхронного двигателя, гистерезисный двигатель
может синхронизировать любую нагрузку, которую он может ускорить, независимо от того, насколько велик
инерция. После достижения синхронизма двигатель продолжает работать в синхронном режиме.
скорость и регулирует его угол крутящего момента, чтобы развивать требуемый крутящий момент
по нагрузке.
Во время разгона ротора угол запаздывания 6 остается постоянным, если поток
постоянна, так как угол 6 зависит только от петли гистерезиса
материал ротора и не зависит от скорости прохождения петли.Таким образом, двигатель развивает постоянный крутящий момент вплоть до синхронной скорости,
как показано на идеализированной характеристике крутящий момент-скорость на фиг. 10б. Этот
Особенность — одно из преимуществ гистерезисного двигателя. По сравнению с
реактивный двигатель, который должен синхронизировать свою нагрузку
из характеристики крутящего момента асинхронного двигателя, гистерезисный двигатель
может синхронизировать любую нагрузку, которую он может ускорить, независимо от того, насколько велик
инерция. После достижения синхронизма двигатель продолжает работать в синхронном режиме.
скорость и регулирует его угол крутящего момента, чтобы развивать требуемый крутящий момент
по нагрузке.
Двигатель с гистерезисом по своей природе тихий и обеспечивает плавное вращение
его нагрузка. Кроме того, ротор имеет такое же количество полюсов, что и
поле статора. Двигатель может работать в многоскоростном синхронном режиме.
когда статор намотан с несколькими наборами обмоток и использует переключение полюсов
соединения. Гистерезисный двигатель может ускорять и синхронизировать высокоинерционный
нагрузки, потому что его крутящий момент одинаков от состояния покоя до синхронной скорости.
Кроме того, ротор имеет такое же количество полюсов, что и
поле статора. Двигатель может работать в многоскоростном синхронном режиме.
когда статор намотан с несколькими наборами обмоток и использует переключение полюсов
соединения. Гистерезисный двигатель может ускорять и синхронизировать высокоинерционный
нагрузки, потому что его крутящий момент одинаков от состояния покоя до синхронной скорости.
3. ОБОРОТНАЯ ТЕОРИЯ ОДНОФАЗНЫХ ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ
Как описано в Разд. 1, статор-ммс волна однофазной индукции
Можно показать, что двигатель эквивалентен двум волнам ммс постоянной амплитуды.
вращаются с синхронной скоростью в противоположных направлениях. Каждый из этих компонентов
Волны статора-ммс индуцируют собственные составляющие токи ротора и создают асинхронный двигатель.
действие точно так же, как в сбалансированном многофазном двигателе. Это двойное вращающееся поле
концепция не только полезна для качественной визуализации, но и может быть
превратилась в количественную теорию, применимую к широкому спектру асинхронных двигателей. типы.Мы не будем здесь обсуждать полную количественную теорию. 1 Однако
мы рассмотрим более простой, но важный случай однофазной индукции
двигатель работает только на своей основной обмотке.
типы.Мы не будем здесь обсуждать полную количественную теорию. 1 Однако
мы рассмотрим более простой, но важный случай однофазной индукции
двигатель работает только на своей основной обмотке.
Рассмотрим условия с неподвижным ротором и только главным статором.
обмотка возбуждена. Тогда двигатель эквивалентен трансформатору с его
вторичный короткозамкнутый. Эквивалентная схема показана на фиг. 11
a, где R1, main и X 1, main — соответственно сопротивление и утечка
реактивное сопротивление основной обмотки, Xm, main — реактивное сопротивление намагничивания, и
R2, main и X2, main — значения сопротивления ротора в состоянии покоя и
реактивное сопротивление утечки относительно основной обмотки статора при использовании соответствующих
отношение оборотов.Потери в сердечнике, которые здесь не указаны, будут учтены позже.
как если бы это была потеря вращения. Приложенное напряжение равно f ‘, а основная обмотка
ток — I_main. Напряжение J_main — это противоэдс, генерируемая в
основная обмотка стационарной пульсирующей магнитной волной в воздушном зазоре, создаваемой
совместное действие токов статора и ротора.
РИС. 11 Эквивалентные схемы для однофазного асинхронного двигателя: (а)
ротор заблокирован (b) ротор заблокирован, показывая эффекты прямого и обратного
поля; (c) рабочие условия.
В соответствии с концепцией двойного вращающегося поля разд. 1, статора mmf можно разделить на половину амплитуды вращения вперед и назад поля. В состоянии покоя амплитуды прямого и обратного равнодействующих Волны потока в воздушном зазоре равны половине амплитуды пульсирующего поля. На фиг. 11b часть эквивалентной схемы, представляющая эффекты потока через воздушный зазор делится на две равные части, представляющие эффекты переднего и заднего полей соответственно.
Теперь рассмотрим условия после того, как двигатель набрал скорость с помощью
какое-то вспомогательное средство и работает только на своей основной обмотке в направлении
переднего поля при удельном скольжении с. Токи ротора, индуцированные
прямое поле имеет частоту скольжения sfe, где fe — приложенный статор
электрическая частота. Как и в любом многофазном двигателе с симметричным многофазным двигателем.
или ротор с короткозамкнутым ротором, эти токи ротора создают бегущую волну ММЧ
вперед со скоростью скольжения по отношению к ротору и, следовательно, при синхронной
скорость относительно статора.Результирующая прямых волн
Статор и ротор mmf создают результирующую прямую волну потока в воздушном зазоре, который
формирует противоэдс J_main, f в основной обмотке статора. В
отраженный эффект ротора, если смотреть со стороны статора, такой же, как в
многофазный двигатель и может быть представлен импедансом 0,5R2, основной / S Jr
j0,5X2, основной параллельно j0,5Xm, основной как в части эквивалента
схема фиг. 1 ЖК с надписью «f». Коэффициент 0,5 зависит от разрешения
пульсирующего статора mmf на переднюю и заднюю составляющие.
Как и в любом многофазном двигателе с симметричным многофазным двигателем.
или ротор с короткозамкнутым ротором, эти токи ротора создают бегущую волну ММЧ
вперед со скоростью скольжения по отношению к ротору и, следовательно, при синхронной
скорость относительно статора.Результирующая прямых волн
Статор и ротор mmf создают результирующую прямую волну потока в воздушном зазоре, который
формирует противоэдс J_main, f в основной обмотке статора. В
отраженный эффект ротора, если смотреть со стороны статора, такой же, как в
многофазный двигатель и может быть представлен импедансом 0,5R2, основной / S Jr
j0,5X2, основной параллельно j0,5Xm, основной как в части эквивалента
схема фиг. 1 ЖК с надписью «f». Коэффициент 0,5 зависит от разрешения
пульсирующего статора mmf на переднюю и заднюю составляющие.
Теперь рассмотрим условия относительно обратного поля. Ротор
все еще поворачиваясь со скольжением s по отношению к переднему полю, и его единичная
скорость n в направлении переднего поля n = 1 с. Относительная скорость
ротора по отношению к обратному полю составляет 1 + n, либо его скольжение с
по отношению к обратному полю — 1 + n = 2 с. Обратное поле тогда индуцирует
токи ротора с частотой (2 с) fe. Для небольших пробуксовок эти роторы
токи почти в два раза превышают частоту статора.
Относительная скорость
ротора по отношению к обратному полю составляет 1 + n, либо его скольжение с
по отношению к обратному полю — 1 + n = 2 с. Обратное поле тогда индуцирует
токи ротора с частотой (2 с) fe. Для небольших пробуксовок эти роторы
токи почти в два раза превышают частоту статора.
Таким образом, при небольшом скольжении осциллограмма тока ротора будет
показать высокочастотную составляющую от обратного поля, наложенную на
низкочастотная составляющая от прямого поля. Если смотреть со стороны статора,
волна ротор-ммс индуцированного обратным полем тока ротора проходит на
синхронная скорость, но в обратном направлении. Схема замещения
представление этих внутренних реакций с точки зрения статора
как у многофазного двигателя, скольжение которого составляет 2 с и показано в части
эквивалентной схемы (фиг.11c) помечены буквой «b». Как и с форвардом
поле, коэффициент 0,5 зависит от разрешения пульсирующего статора
mmf на прямые и обратные компоненты. Напряжение J ~ main, b на
параллельная комбинация, представляющая обратное поле, является противоэдс. генерируется в основной обмотке статора результирующим обратным полем.
генерируется в основной обмотке статора результирующим обратным полем.
Используя эквивалентную схему фиг. 11 в, ток статора, мощность входной мощности, а коэффициент мощности можно вычислить для любого предполагаемого значения скольжения, когда приложенное напряжение и полное сопротивление двигателя известны.Чтобы упростить обозначение, пусть
(уравнение 4)
(уравнение 5)
Импедансы, представляющие реакции прямого и обратного полей с точки зрения однофазной главной обмотки статора 0,5Zf и 0,5Zb соответственно на фиг. 11 с.
Исследование эквивалентной схемы (фиг. 11c) подтверждает вывод,
достигнуты качественными рассуждениями в разд. 1 (фиг. 2b), что передний
Волна потока в воздушном зазоре увеличивается, а обратная волна уменьшается, когда ротор
приводится в движение.Когда двигатель работает с небольшим скольжением, отраженный
влияние сопротивления ротора в прямом поле, 0,5 R2, main / S, значительно
больше, чем его значение состояния покоя, в то время как соответствующий эффект в
обратное поле, 0,5R2, основное / (2 с), меньше.
Следовательно, полное сопротивление прямого поля больше, чем его значение в состоянии покоя, в то время как обратное поле меньше. Счетчик ЭДС прямого поля Emain, f поэтому больше, чем его значение состояния покоя, в то время как обратное поле счетчик ЭДС / ~ main, b меньше; я.т.е. прямая волна потока в воздушном зазоре увеличивается, в то время как обратная магнитная волна уменьшается.
Механическая мощность и крутящий момент могут быть вычислены путем приложения крутящего момента. и отношения мощности, разработанные для многофазных двигателей в разделе 6. Крутящие моменты каждое из полей прямого и обратного направления может рассматриваться в этом манера. Взаимодействие встречно вращающегося потока и ММП-волн вызывает пульсации крутящего момента при удвоенной частоте статора, но без среднего крутящего момента.
[…]
Проверка порядка величины числовых значений в Примере 2 предлагает приближения, которые обычно могут быть сделаны. Эти приближения относятся, в частности, к сопротивлению обратного поля. Обратите внимание, что сопротивление 0,5 (Rb + j Xb) составляет всего около 5 процентов от общего импеданса двигателя для скольжение почти при полной нагрузке.
Следовательно, приблизительно 20 процентов этого импеданса вызовет ошибку только около 1% в токе двигателя.Хотя строго говоря, импеданс обратного поля является функцией скольжения, очень мало ошибка обычно возникает в результате вычисления ее значения при любом удобном вводе нормальная рабочая область, например, 5 процентов, а затем предполагая, что Rb и Xb быть константами.
В несколько большем приближении эффект шунтирования j Xm, основную на импедансе обратного поля, часто можно пренебречь, откуда
(уравнение 15)
Это уравнение дает значения сопротивления обратного поля, которые на несколько процентов выше, что можно увидеть при сравнении с точным выражением приведено в примере 2.
Пренебрежение s в уравнении. 9.15 будет иметь тенденцию давать значения обратного поля сопротивление, которое было бы слишком низким, и, следовательно, такое приближение имеют тенденцию противодействовать ошибке в формуле. 9.15. Следовательно, для небольших промахов
(уравнение 16)
В многофазном двигателе (раздел 6.5) максимальный внутренний крутящий момент и скольжение, при котором оно происходит, легко выразить параметрами двигателя; максимальный внутренний крутящий момент не зависит от сопротивления ротора.Нет таких простые выражения существуют для однофазного двигателя. Однофазная проблема намного сложнее из-за наличия обратного поля, эффект которого двоякий: (1) он поглощает часть приложенного напряжения, тем самым уменьшая доступное для прямого поля напряжение и уменьшая развиваемый передний крутящий момент; и (2) обратное поле дает отрицательные крутящий момент, уменьшая эффективный развиваемый крутящий момент. Оба эти эффекта зависят от от сопротивления ротора, а также реактивного сопротивления утечки.Следовательно, в отличие от многофазный двигатель, максимальный внутренний крутящий момент однофазного двигателя составляет зависит от сопротивления ротора; с увеличением сопротивления ротора уменьшается максимальный крутящий момент и увеличивает скольжение, при котором возникает максимальный крутящий момент.
В основном из-за эффектов обратного поля однофазный асинхронный двигатель несколько уступает многофазному двигателю, использующему тот же ротор и тот же сердечник статора. Однофазный двигатель имеет нижний максимум крутящий момент, возникающий при более низком скольжении.При том же крутящем моменте однофазный двигатель имеет более высокое скольжение и большие потери, в основном из-за обратного поля ротор 12R потери. Потребляемая мощность однофазного двигателя больше, главным образом из-за мощности и реактивных вольт-ампер, потребляемых обратное поле. Потери статора 12R также несколько выше в однофазном двигатель, потому что одна фаза, а не несколько, должна пропускать весь ток. Из-за больших потерь КПД ниже, а температура подъем при том же крутящем моменте выше.Для однофазный двигатель, чем многофазный двигатель той же мощности и скорости рейтинг. Благодаря большему размеру рамы максимальный крутящий момент может быть достигнут сравнимо с физически меньшим по размеру, но с равным номиналом многофазным мотор. Несмотря на больший размер рамы и необходимость вспомогательного пусковые устройства, однофазные двигатели общего назначения в стандарте дробные киловаттные рейтинги стоят примерно столько же, сколько соответственно номинальные многофазные двигатели из-за гораздо большего объема производства бывшего.
4. ДВУХФАЗНЫЕ ИНДУКЦИОННЫЕ ДВИГАТЕЛИ
Как мы видели, большинство однофазных асинхронных двигателей фактически построено в виде двухфазных двигателей с двумя обмотками статора в пространственной квадратуре. Основная и вспомогательная обмотки обычно очень разные, с разными количество витков, размер провода и распределение витков. Эта разница в комбинация с конденсатором, который обычно используется последовательно с вспомогательная обмотка, гарантирует, что ММФ производятся двумя обмотками токи будут довольно несбалансированными; в лучшем случае они могут быть сбалансированы по одному конкретному рабочая точка.Таким образом, мы обсудим различные аналитические методы для двухфазные двигатели, чтобы расширить наше понимание и понимание машины производительности, а также разработать методики анализа одно- и двухфазные двигатели.
В сбалансированных условиях эксплуатации симметричный двухфазный двигатель может быть проанализированы с использованием методов, разработанных в разделе 6 для трехфазных двигателей, слегка изменен, чтобы учесть тот факт, что есть два фазы, а не три.
В этом разделе мы сначала обсудим один метод, который можно использовать для проанализировать симметричный двухфазный двигатель, работающий в несимметричном режиме условия. Затем мы формально выведем аналитическую модель несимметричного двухфазный двигатель, который может быть применен к однофазным двигателям в общем случае отключая как свои основные, так и вспомогательные обмотки.
4.1 Несбалансированная работа симметричных двухфазных машин; Симметричная составляющая Концепт
При работе только от основной обмотки однофазный двигатель крайний случай, когда двигатель работает в условиях несимметричного тока статора.В некоторых случаях в источнике питания возникают несимметричные напряжения или токи. сеть к двигателю, например, при перегорании линейного предохранителя. В остальных случаях несбалансированный напряжения создаются пусковыми сопротивлениями однофазных двигателей, как описано в разд. 2. Цель этого раздела — разработать теория симметричных компонентов двухфазных асинхронных двигателей с двойным вращающимся полем концепция и показать, как теория может быть применена к множеству проблем с асинхронными двигателями, имеющими две обмотки статора в пространственной квадратуре.
Сначала рассмотрим, что происходит при сбалансированном двухфазном напряжении. применяются к выводам статора двухфазной машины, имеющей единый воздушный зазор, симметричный многофазный или сепараторный ротор и два одинаковых статора обмотки ot и fl в пространственной квадратуре. Токи статора равны в по величине и во временной квадратуре.
Когда ток в обмотке ot достигает своего мгновенного максимума, ток в обмотке fl равен нулю, а волна статора-ммс центрирована на оси обмотка или.Точно так же волна статора-ммс центрируется на оси обмотки. fl в тот момент, когда ток в обмотке fl равен мгновенному максимум. Таким образом, волна статора-ммс распространяется на 90 электрических градусов в пространство во временном интервале, соответствующем изменению фазы на 90 ° применяемого напряжение, с направлением его движения в зависимости от чередования фаз токов. Более полный анализ, как в разделе 4.5, показывает что бегущая волна имеет постоянную амплитуду и постоянную угловую скорость.Этот факт, конечно же, является основой теории сбалансированной работы. индукционных машин.
Поведение двигателя для сбалансированных двухфазных приложенных напряжений либо последовательность фаз может быть легко определена. Таким образом, если ротор вращается при скольжении s в направлении от обмотки альфа к обмотке r вывод полное сопротивление на фазу дается эквивалентной схемой на фиг. 12а когда приложенное напряжение fz ~ отстает от подаваемого напряжения на 90 °.Через в остальной части этого лечения эта фазовая последовательность называется положительной последовательностью. и обозначается индексом ‘f’, поскольку токи прямой последовательности результат в поле вперед. Когда ротор работает с той же скоростью и в том же направлении оконечный импеданс на фазу определяется эквивалентная схема фиг. 12b, когда выводы fz ~ запитаны на 90 °. Эта фаза последовательность называется отрицательной последовательностью и обозначается индексом ‘b’, поскольку токи обратной последовательности создают обратное поле.
РИС. 12 Однофазные схемы замещения двухфазного двигателя под
несбалансированные условия (а) прямое поле и (б) обратное поле.
РИС. 13 Синтез неуравновешенной двухфазной системы из суммы
две уравновешенные системы противофазной последовательности.
Предположим теперь, что два сбалансированных двухфазных источника напряжения противоположной фазы последовательность подключаются последовательно и применяются одновременно к двигателю, как показано на фиг.13а, где приложены векторные напряжения Vf и j Vf соответственно, к обмоткам ot и fl образуют сбалансированную систему положительной последовательности, а вектор напряжения «V’b и -j l? b образуют другую сбалансированную систему, но с отрицательным последовательность.
Результирующее напряжение V, ~, приложенное к обмотке ct, равно вектору
(уравнение 17)
… а применительно к обмотке fl …
(уравнение 18)
РИС. 13b показана обобщенная векторная диаграмма, на которой прямой или В положительной последовательности система задается векторами ~ ‘r и j l ~’ r и система обратной или отрицательной последовательности задается векторами ~ ‘b и -j ~ ‘б.Результирующие напряжения, определяемые векторами 12 ~ и V / ~, не соответствуют как правило, равные по величине или по квадратуре по времени. Из этого обсуждения мы видим, что несбалансированная двухфазная система приложенных напряжений V ~ и V # может быть синтезирован путем объединения двух сбалансированных наборов напряжений противоположной фазы. последовательность.
Однако с системами с симметричными компонентами работать намного проще. чем их несбалансированная результирующая система. Таким образом, легко вычислить составляющие токи, создаваемые каждой симметрично-компонентной системой применяемых напряжения, потому что асинхронный двигатель работает как сбалансированный двухфазный двигатель для каждой компонентной системы.
При наложении фактический ток в обмотке складывается из компоненты. Таким образом, если if и Ib являются, соответственно, положительной и отрицательной последовательностями компонентных векторных токов в обмотке или, соответственно, положительного и векторные токи составляющей обратной последовательности в обмотке fl равны соответственно jif и -j ib, а фактические токи обмотки i ~ и i # равны
[…]
РИС. 14 Разрешение несимметричных двухфазных напряжений на симметричные
компоненты.
4,2 Общий случай: асимметричные двухфазные индукционные машины
Как мы уже говорили, однофазный асинхронный двигатель с основным и вспомогательным обмотка — пример несимметричного двухфазного асинхронного двигателя. В В этом разделе мы разработаем модель такого двухфазного двигателя, используя обозначения подходит для однофазного двигателя. Предположим, как обычно случай, когда обмотки находятся в пространственной квадратуре, но несимметричны в том, что они могут иметь разное количество витков, разное распределение обмоток, и так далее.
Наш аналитический подход заключается в представлении ротора эквивалентным двухфазным обмотка, схематически изображенная на фиг. 16 и начать с потокосцепления / тока отношения для ротора и статора формы
(уравнение 25)
, где 0me — угол ротора, измеренный в электрических радианах.
Lmain = собственная индуктивность основной обмотки
РИС. 16 Схематическое изображение двухфазного асинхронного двигателя с эквивалентный двухфазный ротор.
[…]
5. РЕЗЮМЕ
Одна из тем этого раздела — продолжение теории индукционных машин. раздела 6 и его применение к однофазному асинхронному двигателю. Этот теория расширяется пошаговым процессом рассуждения от простого вращающегося поля теория симметричного многофазного асинхронного двигателя. Основная концепция разрешение статорной ММЧ-волны на два бегущих с постоянной амплитудой волны, вращающиеся вокруг воздушного зазора с синхронной скоростью в противоположных направлениях.Если проскальзывание для переднего поля равно s, то для заднего поля равно (2 с). Каждое из этих составляющих полей производит действие асинхронного двигателя, как в симметричном многофазном двигателе. С точки зрения статора, отраженные эффекты ротора можно визуализировать и выразить количественно в терминах простых схем замещения. Легкость, с которой внутреннее реакции могут быть объяснены таким образом, является существенной причиной полезность теории двойного вращающегося поля.
Для однофазной обмотки прямая и обратная составляющие ММЧ-волн равны, а их амплитуда составляет половину максимального значения пика стационарный пульсирующий ММФ, создаваемый обмоткой. Разрешение статора mmf на его переднюю и заднюю компоненты затем приводит к физическая концепция однофазного двигателя описана в разд. 1 и наконец, к количественной теории, развитой в разд. 3 и эквивалент схемы фиг.11.
В большинстве случаев однофазные асинхронные двигатели на самом деле являются двухфазными двигателями. с несимметричными обмотками, питаемыми от однофазного источника. Таким образом чтобы завершить наше понимание однофазных асинхронных двигателей, необходимо для проверки производительности двухфазных двигателей. Следовательно, следующий шаг — применение изображения двойного вращающегося поля к симметричной двухфазной двигатель с несимметричным приложенным напряжением, как в разд. 4.1. Это расследование приводит к концепции симметричных компонентов, согласно которой несбалансированная двухфазная систему токов или напряжений можно разложить на сумму двух уравновешенных двухфазные компонентные системы противофазной последовательности.Резолюция токи в системы с симметричными компонентами эквивалентно разрешению волна статора-ммс на его прямую и обратную составляющие, и, следовательно, внутренние реакции ротора для каждой симметрично-компонентной системы такие же, как и те, которые мы уже исследовали. Очень похожий процесс рассуждений, который здесь не рассматривается, приводит к хорошо известному трехфазному симметрично-компонентный метод решения проблем с несбалансированными работа трехфазных вращающихся машин.Легкость, с которой вращается машина может быть проанализирована с точки зрения теории вращающегося поля. причина полезности метода симметричных компонентов.
Наконец, раздел заканчивается на Разд. 4.2 с развитием аналитического теория для общего случая двухфазного асинхронного двигателя с несимметричным обмотки. Эта теория позволяет анализировать работу однофазных двигатели, работающие как от основной, так и от вспомогательной обмоток.
6. ВИКТОРИНА
Двигатель с конденсаторным пуском, 1 кВт, 120 В, 60 Гц, имеет следующие параметры для основной и вспомогательной обмоток (при пуске):
Zmain = 4.82 + j7.25 Zau x —7.95 + j9.21 Ом основная обмотка вспомогательная обмотка
а. Найдите величину и фазовые углы токов в двух обмотках. когда на двигатель подается номинальное напряжение в пусковых условиях.
г. Найдите значение пусковой емкости, при которой будут размещены основные и токи вспомогательной обмотки во временной квадратуре при пуске.
г. Повторите часть (a), когда емкость части (b) вставлена последовательно. со вспомогательной обмоткой.
2. Повторите задачу 1, если двигатель работает от источника 120 В, 50 Гц.
3. Учитывая приложенную электрическую частоту и соответствующие импедансы Zmain и Zaux основной и вспомогательной обмоток при пуске пишем скрипт MATLAB для вычисления значения емкости, которая при подключении последовательно с пусковой обмоткой образует пусковую обмотку ток, опережающий ток основной обмотки на 90 °.
4. Повторить пример 2 для скольжения 0,045.
5. Однофазный асинхронный двигатель мощностью 500 Вт, 115 В, 60 Гц имеет следующие параметры (сопротивления и реактивные сопротивления в Ом / фаза):
R1, основной = 1,68 R2, основной = 2,96
X1, основной ~ -1,87 Xm, основной = 60,6 X2, основной = 1,72
Потери в сердечнике = 38 Вт
Трение и ветровая нагрузка = 11,8 Вт
Найти скорость статора ток, крутящий момент, выходная мощность и эффективность при работе двигателя при номинальном напряжении и скольжении 4.2 процента.
6. Напишите сценарий MATLAB для построения графиков скорости и эффективности.
однофазного двигателя задачи 5 в зависимости от выходной мощности
в диапазоне 0 7. В состоянии покоя действующие токи
в основной и вспомогательной обмотках четырехполюсного, конденсаторно-пускового
асинхронный двигатель: / main = 20,7 A и laux = 11,1 A соответственно. В
ток вспомогательной обмотки опережает ток основной обмотки на 53 °. В
число эффективных оборотов на полюс (т.е., количество витков с поправкой на
эффекты распределения обмоток) N_main -42 и N_aux = 68. Обмотки
находятся в космической квадратуре. а. Определите пиковые амплитуды прямого и обратного статора-ммс.
волны. г. Предположим, можно было отрегулировать величину и фазу вспомогательной обмотки.
Текущий. Какая амплитуда и фаза будут производить чисто прямую волну ммф?
9.8 Выведите выражение через a2, главное для ненулевой скорости
однофазный асинхронный двигатель с нулевым внутренним крутящим моментом.(Видеть
Пример 2.) 9. Параметры схемы замещения 8 кВт, 230 В, 60 Гц,
четырехполюсный, двухфазный асинхронный двигатель с короткозамкнутым ротором, Ом на фазу
являются Rl = 0,253 Xl = 1,14 Xm = 32,7 R2 = 0,446 X2 = 1,30 Этот двигатель
работает от несимметричного двухфазного источника 60 Гц, фазные напряжения которого
составляют, соответственно, 223 и 190 В, причем чем меньше напряжение, тем больше
на 73 °. Для бланка 0,045 найдите: а. фазные токи в каждой из обмоток и г.внутренняя механическая сила. 10. Рассмотрим двухфазный двигатель из Примера 3. а. Найдите пусковой момент для условий, указанных в примере. г. Сравните результат части (а) с пусковым моментом, который двигатель
возникнет, если к
мотор. г. Покажите, что если напряжения статора f ‘~ и V_beta двухфазной индукции
электродвигатели находятся во временном квадратуре, но не равны по величине, пусковой крутящий момент
такое же, как при сбалансированных двухфазных напряжениях величины
v / V ~ V ~ применяются. 11. Асинхронный двигатель задачи 9 питается от неуравновешенного
двухфазный источник с четырехпроводным механизмом подачи с импедансом Z = 0,32 +
j 1,5 Ом / фаза. Напряжения источника можно выразить как fe d -235L0 ° f ‘~
= 212/78 ° Для скольжения 5 процентов покажите, что клемма асинхронного двигателя
напряжения больше соответствуют сбалансированному двухфазному набору, чем те
источника. 12. Параметры эквивалентной схемы в омах на фазу, относящиеся к
статор для двухфазного, 1.0 кВт, 220 В, четырехполюсный, 60 Гц, беличья клетка
асинхронные двигатели приведены ниже. Потеря вращения без нагрузки составляет 65 Вт. R1
= 0,78 R2 = 4,2 X1 = X2 = 5,3 Xm = 93 а. Напряжение, приложенное к фазе c ~, составляет 220L0 ° В, а напряжение, приложенное к фазе / 3.
составляет 220L65 ° V. Найдите чистый крутящий момент в воздушном зазоре при скольжении s = 0,035. г. Каков пусковой крутящий момент при приложенных напряжениях части (а)? г. Приложенные напряжения регулируются таким образом, чтобы f ‘~ 220L65 ° V и f’t ~
-220L90 ° В. Полная нагрузка на машину возникает при s = 0,048. На каком скольжении максимально
возникает внутренний крутящий момент? Какое значение максимального крутящего момента? г. Пока двигатель работает, как в части (c), фаза fl разомкнута.
Какова выходная мощность машины при скольжении s = 0,04? e. Какое напряжение появляется на разомкнутых клеммах фазы-fl в условиях
части (d)? 13. А 120 В, 60 Гц, конденсаторный, двухполюсный, однофазный
асинхронный двигатель имеет следующие параметры: Lmain = 47.2 мГн Rmain = 0,38 Laux = 102 мГн Raux -1,78 Ом Lr = 2,35 / zH Rr = 17,2 / Ом Lmain, r -0,342 мH Laux, r = 0,530 мГн Вы можете предположить, что у двигателя 48 Вт потерь в сердечнике и 23 Вт вращательного
убытки. Обмотки двигателя подключаются с соблюдением полярности, показанной на фиг. 17 с рабочим конденсатором 40 #F. а. Рассчитайте пусковой крутящий момент двигателя. Если двигатель работает со скоростью 3490 об / мин, рассчитайте г.токи основной и вспомогательной обмоток, г. общий линейный ток и коэффициент мощности двигателя, г. выходная мощность и e. потребляемая электрическая мощность и КПД. Обратите внимание, что эту проблему проще всего решить с помощью MATLAB. 14. Рассмотрим однофазный двигатель задачи 13. Напишите сценарий MATLAB.
для поиска в диапазоне емкостей конденсаторов от 25 мкФ до 75 мкФ, чтобы найти
значение, которое максимизирует КПД двигателя при скорости двигателя
3490 об / мин.Каков соответствующий максимальный КПД? 15. Для увеличения пускового момента используется однофазная индукционная
двигатель Задачи 13 должен быть преобразован в конденсаторный, конденсаторный.
мотор. Напишите сценарий MATLAB, чтобы найти минимальное значение пусковой емкости.
требуется для увеличения пускового момента до 0,5 Н-м. 16. Рассмотрим однофазный асинхронный двигатель из Примера 5, работающий
в диапазоне скоростей от 3350 до 3580 об / мин. а. Используйте MATLAB, чтобы построить график выходной мощности в заданном диапазоне скоростей. г. Постройте график КПД двигателя в этом диапазоне скоростей. г. На том же графике, что и в части (b), постройте КПД двигателя, если
Рабочий конденсатор увеличен до 45 мкФ. Как мы уже видели в предыдущей статье серводвигатель. Здесь мы обсудим двухфазный и трехфазный серводвигатель переменного тока.Статор двухфазного серводвигателя переменного тока имеет две распределенные обмотки, которые электрически смещены друг от друга на 90 градусов. Одна обмотка, известная как опорная или фиксированная фаза, питается от источника постоянного напряжения. Другой известен как контрольная фаза, и он имеет переменное напряжение. Схема подключения двухфазного серводвигателя переменного тока показана ниже: Управляющая фаза обычно подается от сервоусилителя.Скорость и крутящий момент ротора регулируются разностью фаз между управляющим напряжением и опорным фазным напряжением. Путем изменения разности фаз с опережения на запаздывание или наоборот направление вращения ротора может быть изменено на противоположное. Характеристика крутящего момента двухфазного серводвигателя переменного тока показана на рисунке ниже: Отрицательный наклон означает высокое сопротивление ротора и обеспечивает двигателю положительное демпфирование для лучшей устойчивости.Кривая линейна для почти различных управляющих напряжений. Реакция двигателя на световой сигнал управления улучшается за счет уменьшения веса и инерции двигателя в конструкции, известной как серводвигатель Drag Cup, как показано на рисунке ниже. Ротор серводвигателя Drag cup изготовлен из тонкой чашки из немагнитного проводящего материала. Неподвижный железный сердечник помещен в середину токопроводящей чашки. Это устройство завершает магнитную цепь. Поскольку ротор двигателя сделан из тонкого материала, его сопротивление будет высоким, что приведет к высокому пусковому крутящему моменту. Трехфазные асинхронные двигатели с контролем напряжения используются в качестве серводвигателей для приложений в сервосистемах большой мощности. Трехфазный асинхронный двигатель с короткозамкнутым ротором представляет собой устройство с сильно нелинейной связью. Он используется в качестве линейно-развязанной машины с использованием метода управления, известного как векторное управление или ориентированное на поле управление. Ток в машинах этого типа регулируется таким образом, что крутящий момент и магнитный поток не связаны.Разделение приводит к высокой скорости и высокому крутящему моменту. NEETS Модуль 5 — Введение в генераторы и двигатели Страницы i,
1−1,
1-11,
1−21,
1−31,
2−1,
2-11,
3−1,
3-11,
4−1,
4-11, Индекс Глава 4 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА Цели обучения По завершении этой главы вы сможете: 1.Перечислите три основных типа двигателей переменного тока
и опишите характеристики каждого типа. 2. Опишите характеристики серийного двигателя, который
позволяют использовать его как универсальный двигатель. 3. Объясните взаимосвязь отдельных этапов
многофазные напряжения, поскольку они создают вращающиеся магнитные поля в двигателях переменного тока. 4. Опишите размещение обмоток статора в двухфазных двигателях переменного тока с использованием вращающихся полей. 5. Перечислите сходства и различия между обмотками статора двухфазных и трехфазных двигателей переменного тока. 6. Укажите основное применение синхронных двигателей и объясните характеристики, которые делают их подходящими.
для этого приложения. 7. Опишите особенности, которые делают асинхронный двигатель переменного тока наиболее широко используемым из
электродвигатели. 8.Опишите разницу между вращающимся полем многофазных двигателей и
«кажущееся» вращающееся поле однофазных двигателей. 9. Объясните работу обмоток с расщепленной фазой в
однофазные асинхронные двигатели переменного тока. 10. Опишите влияние экранированных полюсов при однофазной индукции переменного тока.
моторы. Введение Большинство энергосистем, как на суше, так и на плаву, вырабатывают переменный ток.По этой причине большинство
двигатели, используемые на всем флоте, предназначены для работы на переменном токе. Есть и другие преимущества использования двигателей переменного тока.
помимо широкой доступности переменного тока. Как правило, двигатели переменного тока стоят меньше, чем двигатели постоянного тока. Некоторые типы двигателей переменного тока
не используйте щетки и коммутаторы. Это устраняет многие проблемы обслуживания и износа. Это также устраняет
проблема опасного искрения. Двигатель переменного тока особенно хорошо подходит для приложений с постоянной скоростью.Это связано с тем, что его скорость определяется частотой переменного напряжения, подаваемого на клеммы двигателя. Двигатель постоянного тока лучше подходит, чем двигатель переменного тока, для некоторых применений, например для тех, которые требуют переменной скорости. AC
Двигатель также может быть выполнен с регулируемыми частотными характеристиками, но только в определенных пределах. Промышленные постройки
Двигатели переменного тока различных размеров, форм и номиналов для различных типов работ.Эти двигатели предназначены для
использовать с многофазными или однофазными системами питания. Здесь невозможно охватить все аспекты
тема двигателей переменного тока. В этой главе рассматриваются только принципы наиболее часто используемых типов. 4-1 В этой главе двигатели переменного тока будут разделены на (1) серийные, (2) синхронные и (3) асинхронные двигатели.
Обсуждаются однофазные и многофазные двигатели.Синхронные двигатели для целей данной главы могут быть
считаются многофазными двигателями постоянной скорости, роторы которых находятся под напряжением постоянного тока. Асинхронные двигатели,
Однофазные или многофазные, роторы которых приводятся в действие за счет индукции, являются наиболее часто используемыми двигателями переменного тока. В
Серийный двигатель переменного тока, в некотором смысле, является знакомым типом двигателя. Он очень похож на двигатель постоянного тока, который был покрыт
глава 2 и послужит мостом между старым и новым. 1 кв. Каковы три основных типа
двигатели переменного тока? ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА серии Серийный двигатель переменного тока электрически идентичен двигателю постоянного тока. См. Рисунок 4-1 и используйте левую
правило полярности катушек. Вы можете видеть, что мгновенные магнитные полярности якоря и поля
противостоят друг другу, и результат двигательного действия. Теперь измените ток, изменив полярность входа.Примечание
что магнитная полярность поля все еще противоположна магнитной полярности якоря. Это потому, что разворот
влияет как на арматуру, так и на поле. Вход переменного тока заставляет эти реверсирования происходить непрерывно. Рисунок 4-1. — Мотор переменного тока серии. Конструкция двигателя переменного тока немного отличается от двигателя постоянного тока. Специальные металлы,
используются ламинаты и обмотки.Они уменьшают потери, вызванные вихревыми токами, гистерезисом и высоким реактивным сопротивлением. Округ Колумбия
мощность может использоваться для эффективного управления двигателем переменного тока, но обратное неверно. The
Характеристики серийного двигателя переменного тока аналогичны характеристикам серийного двигателя постоянного тока. Это машина с переменной скоростью. Это
имеет низкие скорости для больших грузов и высокие скорости для легких грузов. Пусковой момент очень 4-2 выс.Серийные двигатели используются для привода вентиляторов, электродрелей и другой мелкой бытовой техники. Поскольку
серийный двигатель переменного тока имеет те же общие характеристики, что и серийный двигатель постоянного тока, был разработан серийный двигатель, который
может работать как от переменного, так и от постоянного тока. Этот двигатель переменного / постоянного тока называется универсальным двигателем. Он находит широкое применение в небольших электрических
Техника. Универсальные двигатели работают с более низким КПД, чем двигатели постоянного или переменного тока. Они встроены в
только небольшие размеры.Универсальные двигатели не работают от многофазного переменного тока. 2 кв. Серийные двигатели
Какое оборудование обычно используется для работы? Q3. Почему серийные двигатели иногда называют универсальными? ВРАЩАЮЩИЕСЯ МАГНИТНЫЕ ПОЛЯ Принцип вращающихся магнитных полей является ключом к работе большинства двигателей переменного тока. И синхронные, и
Двигатели асинхронного типа полагаются на вращающиеся магнитные поля в статорах, которые заставляют их роторы вращаться. Идея проста. магнитное поле в статоре может вращаться электрически вокруг и вокруг. Другой
Магнитное поле в роторе может преследовать его, притягиваясь и отталкиваясь полем статора. Потому что
ротор может свободно вращаться, он следует за вращающимся магнитным полем в статоре. Посмотрим, как это делается. Вращающиеся магнитные поля могут быть созданы в двухфазных или трехфазных машинах.Установить вращающийся магнитный
поля в статоре двигателя количество пар полюсов должно быть таким же (или кратным) количеству фаз в
приложенное напряжение. Затем полюса должны быть смещены друг относительно друга на угол, равный фазовому углу между
отдельные фазы приложенного напряжения. 4 кв. От чего зависит количество полевых полюсов, необходимых для
установить вращающееся магнитное поле в статоре многофазного двигателя? ДВУХФАЗНОЕ ВРАЩЕНИЕ Магнитный
ПОЛЕ Вращающееся магнитное поле, вероятно, легче всего увидеть в двухфазном статоре.Статор двухфазной индукции
двигатель состоит из двух обмоток (или кратных двум). Они расположены под прямым углом друг к другу вокруг
статор. На упрощенном чертеже на рис. 4-2 показан двухфазный статор. 4-3 Рисунок 4-2. — Двухфазный статор двигателя. Если напряжения, приложенные к фазам 1-1A и 2-2A, не совпадают по фазе на 90º, токи, протекающие в
фазы смещены друг от друга на 90º.Поскольку магнитные поля, генерируемые в катушках, находятся в фазе с
соответствующие токи, магнитные поля также на 90º не совпадают по фазе друг с другом. Эти двое Противофазные магнитные поля, оси катушек которых расположены под прямым углом друг к другу, складываются каждые мгновений
во время их цикла. Они создают результирующее поле, которое вращается на один оборот за каждый цикл переменного тока. Кому
проанализируйте вращающееся магнитное поле в двухфазном статоре, см. рисунок 4-3.Стрелка представляет ротор.
Для каждой точки, установленной на диаграмме напряжения, учитывайте, что ток течет в направлении, которое вызовет
магнитная полярность указана на каждом полюсном наконечнике. Обратите внимание, что от одной точки к другой полярности меняются.
от одного полюса к другому по часовой стрелке. За один полный цикл входного напряжения получается 360-градусный
вращение полярностей полюсов. Посмотрим, как получается такой результат. 4-4 Рисунок 4-3.- Двухфазное вращающееся поле. Формы сигналов на рисунке 4-3 относятся к двум входным фазам, смещенным на 90º из-за того, как они были
генерируется двухфазным генератором переменного тока. Формы сигналов пронумерованы в соответствии с их фазой. Хотя нет
Как показано на этом рисунке, обмотки для полюсов 1-1A и 2-2A будут такими, как показано на предыдущем рисунке. В
положение 1, ток и магнитное поле в обмотке 1-1A максимальные (поскольку фазное напряжение
максимум).Ток и магнитное поле в обмотке 2-2А равны нулю (поскольку фазное напряжение равно нулю). В
Таким образом, результирующее магнитное поле находится в направлении оси 1-1A. В точке под углом 45 градусов (положение 2)
результирующее магнитное поле находится посередине между обмотками 1-1A и 2-2A. Токи катушки и магнитные поля равны
равные по силе. При 90º (положение 3) магнитное поле в обмотке 1-1A равно нулю. Магнитное поле в обмотке
2-2A максимально.Теперь результирующее магнитное поле лежит вдоль оси обмотки 2-2A, как показано. В
результирующее магнитное поле повернулось на 90º по часовой стрелке, чтобы перейти из положения 1 в положение 3. Когда
двухфазные напряжения завершили один полный цикл (позиция 9), результирующее магнитное поле повернулось через
360º. Таким образом, поместив две обмотки под прямым углом друг к другу и возбудив эти обмотки напряжением 90º
в противофазе возникает вращающееся магнитное поле. Двухфазные двигатели используются редко, за исключением специального оборудования. Они обсуждаются здесь, чтобы помочь в
понимание вращающихся полей. Однако вы встретите много однофазных и трехфазных двигателей. Q5. Каково угловое смещение полюсов возбуждения статора двухфазного двигателя? 4-5 ТРЕХФАЗНЫЕ ВРАЩАЮЩИЕСЯ ПОЛЯ Трехфазный асинхронный двигатель также работает от
принцип вращающегося магнитного поля.Следующее обсуждение показывает, как можно расположить обмотки статора.
подключен к трехфазному входу переменного тока и имеет результирующее магнитное поле, которое вращается. Рисунок 4-4, виды
A-C показывают отдельные обмотки для каждой фазы. На рис. 4-4, вид D показано, как три фазы связаны друг с другом.
в статоре с Y-соединением. Точка на каждой диаграмме указывает общую точку Y-образного соединения. Ты это видишь
отдельные фазные обмотки равномерно расположены вокруг статора.Таким образом, обмотки разнесены на 120º. Рисунок 4-4. — Трехфазный статор с Y-соединением. Трехфазное входное напряжение статора на рисунке 4-4 показано на графике рисунка 4-5. Использовать
правило левой руки для определения электромагнитной полярности полюсов в любой момент времени. Применяя
Правило для катушек на рисунке 4-4, учтите, что ток течет к номерам клемм для положительных напряжений,
и подальше от номеров клемм для отрицательных напряжений. 4-6 Рисунок 4-5. — Полярность трехфазного вращающегося поля и входные напряжения. Результаты этого анализа показаны для точек напряжения с 1 по 7 на рисунке 4-5. В точке 1
Магнитное поле в катушках 1-1A является максимальным при указанной полярности. В то же время возникают отрицательные напряжения.
войлок в обмотках 2-2А и 3-3А.Они создают более слабые магнитные поля, которые, как правило, помогают полю 1-1A. В
точка 2, максимальное отрицательное напряжение ощущается в обмотках 3-3А. Это создает сильное магнитное поле, которое,
в свою очередь, этому способствуют более слабые поля в 1-1A и 2-2A. Поскольку каждая точка на графике напряжения проанализирована, ее можно
Видно, что результирующее магнитное поле вращается по часовой стрелке. Когда трехфазное напряжение
завершает один полный цикл (точка 7), магнитное поле повернулось на 360º. 6 кв. Что является основным
разница между двухфазным и трехфазным статором? ПОВЕДЕНИЕ РОТОРА В ВРАЩАЮЩЕМСЯ ПОЛЕ Для объяснения движения ротора предположим, что мы можем разместить стержневой магнит в центре статора.
схемы рисунка 4-5. Мы установим этот магнит так, чтобы он мог свободно вращаться в этой области. Предположим также, что
стержневой магнит выровнен так, что в точке 1 его южный полюс находится напротив большого N поля статора. Вы можете видеть, что это выравнивание естественно. В отличие от полюсов притягиваются, и два поля выровнены так, что они
привлечение. Теперь перейдите от точки 1 к точке 7. Как и раньше, поле статора вращается по часовой стрелке. Стержневой магнит,
свободно двигаться, будет следовать за полем статора, потому что притяжение между двумя полями 4-7 продолжает существовать. вал, проходящий через точку поворота стержневого магнита, будет вращаться при том же
скорость как вращающееся поле.Эта скорость называется синхронной скоростью. Вал представляет собой вал
рабочий двигатель, к которому прикреплена нагрузка. Помните, это объяснение является чрезмерным упрощением. это
предназначен для того, чтобы показать, как вращающееся поле может вызвать механическое вращение вала. Такое расположение сработает, но
не используется. У ротора с постоянным магнитом есть ограничения. Практические двигатели используют другие методы, как мы и будем
см. в следующих абзацах. СИНХРОННЫЕ ДВИГАТЕЛИ Конструкция синхронных электродвигателей по существу такая же, как конструкция выступающих частей.
полюсный генератор. Фактически, такой генератор может работать как двигатель переменного тока. Он похож на рисунок на рисунке
4-6. Синхронные двигатели имеют характеристику постоянной скорости между холостым ходом и полной нагрузкой. Они способны
коррекции низкого коэффициента мощности индуктивной нагрузки при их работе в определенных условиях.Они есть
часто используется для привода генераторов постоянного тока. Синхронные двигатели проектируются мощностью до тысяч лошадиных сил. Они
могут быть выполнены как однофазные, так и многофазные машины. Дальнейшее обсуждение основано на
трехфазный дизайн. Рисунок 4-6. — Синхронный двигатель с вращающимся полем. Чтобы понять, как работает синхронный двигатель, предположим, что подача трехфазного переменного тока на
статор вызывает создание вращающегося магнитного поля вокруг ротора.Ротор находится под напряжением постоянного тока (он действует
как стержневой магнит). Сильное вращающееся магнитное поле притягивает сильное поле ротора, активируемое постоянным током. Этот
приводит к сильному вращению вала ротора. Таким образом, ротор может поворачивать груз, когда он вращается в
шаг с вращающимся магнитным полем. Так работает после запуска. Однако один из
Недостатками синхронного двигателя является то, что он не может быть запущен из состояния покоя подачей трехфазного переменного тока.
мощность статора.Когда на статор подается переменный ток, сразу появляется вращающееся с большой скоростью магнитное поле.
Это вращающееся поле проносится мимо полюсов ротора так быстро, что у ротора нет возможности запустить его.
Фактически, ротор отталкивается сначала в одном направлении, а затем в другом. синхронный двигатель в чистом виде
не имеет пускового момента. Он имеет крутящий момент только тогда, когда он работает с синхронной скоростью. Беличья клетка
обмотки добавляется к ротору синхронного двигателя, чтобы вызвать его запуск.Беличья клетка обозначена
внешняя часть ротора на рисунке 4-7. Он назван так потому, что имеет форму и выглядит как поворотный
Беличья клетка. Просто обмотки — это тяжелые медные шины, закороченные 4-8 вместе медными кольцами. в этих закороченных обмотках индуцируется низкое напряжение из-за вращения
трехфазное поле статора. Из-за короткого замыкания в беличьей клетке протекает относительно большой ток.Это вызывает магнитное поле, которое взаимодействует с вращающимся полем статора. Из-за взаимодействия
ротор начинает вращаться вслед за полем статора; мотор запускается. Мы снова наткнёмся на беличьи клетки в других
приложения, где они будут рассмотрены более подробно. Рисунок 4-7. — Самозапускающийся синхронный двигатель переменного тока. Чтобы запустить практический синхронный двигатель, статор находится под напряжением, но подача постоянного тока в поле ротора
не под напряжением.Обмотки с короткозамкнутым ротором доводят ротор до почти синхронной скорости. В этот момент поле постоянного тока
находится под напряжением. Это блокирует ротор синхронно с вращающимся полем статора. Развивается полный крутящий момент, а нагрузка
ведется. механическое переключающее устройство, работающее за счет центробежной силы, часто используется для подачи постоянного тока на ротор
по мере достижения синхронной скорости. Практический синхронный двигатель имеет недостаток в том, что он требует постоянного тока.
напряжение возбудителя для ротора.Это напряжение может быть получено как снаружи, так и изнутри, в зависимости от
конструкция мотора. Q7. Каким требованиям специально разработан синхронный двигатель? ИНДУКЦИОННЫЕ ДВИГАТЕЛИ Асинхронный двигатель — это наиболее часто используемый тип двигателя переменного тока. Его простая и прочная конструкция стоит дорого.
относительно мало в производстве. Асинхронный двигатель имеет ротор, который не подключен к внешнему источнику
Напряжение.Асинхронный двигатель получил свое название от того факта, что напряжение переменного тока индуцируется в цепи ротора.
вращающееся магнитное поле статора. Во многих отношениях индукция в этом двигателе аналогична индукционной.
между первичной и вторичной обмотками трансформатора. Большие двигатели и стационарные двигатели
которые приводят в движение нагрузки с довольно постоянной скоростью, часто являются асинхронными двигателями. Примеры можно найти в стиральных машинах,
компрессоры холодильников, настольные шлифовальные машины и настольные пилы. Статор конструкции трехфазный
асинхронный двигатель и трехфазный синхронный двигатель практически идентичны. Однако их роторы полностью
разные (см. рис. 4-8). Индукционный ротор представляет собой многослойный цилиндр с прорезями на поверхности. В
обмотки в этих пазах бывают двух типов (показаны на рис. 4-9). Наиболее распространена обмотка типа «беличья клетка».
Вся обмотка состоит из 4-9 тяжелых медных стержня, соединенных на каждом конце металлическим кольцом из меди или латуни.Нет
Между сердечником и стержнями требуется изоляция. Это связано с очень низкими напряжениями, возникающими в
штанги ротора. Другой тип обмотки содержит настоящие катушки, размещенные в пазах ротора. Тогда ротор называется
намотанный ротор. Рисунок 4-8. — Индукционный двигатель. Рисунок 4-9. — Типы роторов асинхронных двигателей переменного тока. Независимо от типа используемого ротора, основной принцип один и тот же. Вращающееся магнитное поле
генерируемый в статоре индуцирует магнитное поле в роторе. Эти два поля взаимодействуют и заставляют ротор 4-10 Двухфазный серводвигатель переменного тока — трехфазный серводвигатель переменного тока
Трехфазные серводвигатели переменного тока
Серия тренингов по электричеству и электронике ВМС (NEETS), модуль 5, с 4-1 по 4-10
– Материя, Энергия,
и постоянного тока – Переменный ток и трансформаторы – Защита, управление и измерение цепей – Электрические проводники, методы электромонтажа,
и схематическое чтение – Генераторы и двигатели – Электронные излучатели, трубки и источники питания – Твердотельные устройства и блоки питания – Усилители – Цепи генерации и формирования волн – Распространение волн, линии передачи и
Антенны – Принципы СВЧ – Принципы модуляции – Введение в системы счисления и логические схемы – — Введение в микроэлектронику – Принципы синхронизаторов, сервоприводов и гироскопов – Введение в испытательное оборудование – Принципы радиочастотной связи – Принципы работы радара – Справочник техника, Главный глоссарий – Методы и практика испытаний – Введение в цифровые компьютеры – Магнитная запись – Введение в волоконную оптику Примечание: Обучение электричеству и электронике военно-морского флота
Содержимое серии (NEETS) — U.С. Собственность ВМФ в свободном доступе. Автоматический двухфазный электродвигатель, мощность: 10-100 кВт,
О компании
Год основания 2004
Юридический статус фирмы Партнерство Фирма
Характер бизнеса Производитель
Количество сотрудников До 10 человек
Годовой оборот50 лакх — 1 крор
Участник IndiaMART с марта 2011 г.
GST24AAYFS4029h2ZT
Создано в году 2004 , по адресу Rajkot , ( Гуджарат, Индия, ), мы, « Shital Electricals », признаны одним из ведущих производителей высшего качества Электродвигатель, самовсасывающий Насос, трехфазный электродвигатель, вибрационный двигатель, воздуходувка, измельчитель и однофазный электродвигатель и т. Д.Мы также предлагаем нашим клиентам превосходное качество Motor Repairing Service . Они разработаны с использованием сырья высшего сорта, которое закупается у некоторых из самых известных и заслуживающих доверия продавцов в отрасли. Предлагаемые нами продукты производятся нашими опытными профессионалами в нашем сложном производственном отделении в соответствии с международными нормами качества. Кроме того, предлагаемые продукты высоко ценятся нашими уважаемыми клиентами за их компактный дизайн, высокое сопротивление изоляции, очень низкий коэффициент рассеяния, высокую надежность в общих приложениях и низкие потери мощности.Они доступны в различных спецификациях, чтобы соответствовать международным стандартам качества. Продукту, предлагаемому нами, также могут помочь клиенты от нас в наиболее разумном ценовом диапазоне.
Видео компании
Электродвигатель премиум-класса, двухфазный, для легких и тяжелых задач
Замечательный. Электродвигатель двухфазный в продаже на Алибабе.com предоставляет отличную возможность для различных организаций, от частных лиц до крупных организаций, повысить свою производительность. Они доступны в огромном количестве. Электродвигатель двухфазный различных форм, размеров и рабочих характеристик. Такое разнообразие гарантирует, что все покупатели, заинтересованные в этих инновационных товарах, найдут наиболее подходящие для удовлетворения их потребностей.
Для обеспечения высочайшей производительности и надежности сайт Alibaba.com предлагает. двухфазный электродвигатель производителей, которые поставляют бесспорно первоклассную продукцию. Они сделаны из прочных материалов, которые выдерживают внешние и внутренние силы, такие как механические удары, химическое воздействие и тепло, среди прочего. В этом смысле они впечатляюще долговечны, а их производительность безупречна. Они просты в установке и обслуживании благодаря своей креативной форме и дизайну, которые позволяют оптимизировать работу с другими компонентами в более крупной системе.Это делает их удобными и популярными среди многих пользователей.
При покупке. Электродвигатель двухфазный с сайта, покупатели уверены в получении продукции высочайшего качества. Они поставляются ведущими мировыми брендами и производителями, которые соблюдают строгие требования к качеству и нормативным требованиям в энергетическом секторе. Возможность вторичной переработки и биоразлагаемость их материалов увеличивает их популярность среди пользователей, поскольку они поддерживают экологическую устойчивость. Они идеально подходят для людей и организаций, которые выступают за экологически чистую энергию и экологически безопасные методы.
Изучение Alibaba.com обнаруживает непреодолимые скидки на эти товары. Все покупатели найдут для себя самое подходящее. Электродвигатель двухфазный вариантов по мощности и бюджету. Благодаря своим высочайшим характеристикам эти предметы стоят всех денег, которые покупатели вкладывают в них.
Шаговые двигатели— Сравнение двухфазных и пятифазных гибридных шаговых двигателей
Вы сузили круг поиска решения для управления движением до шагового двигателя.Теперь пора определиться, 2 фазы или 5 фаз? ORIENTAL MOTOR производит как 2-фазные (1,8 ° / 0,9 °), так и 5-фазные (0,72 ° / 0,36 °) шаговые двигатели и драйверы. Наш опыт работы с обеими технологиями дает нам уникальную перспективу. ORIENTAL MOTOR собрал быстрое сравнение функций, чтобы развеять путаницу и мифы о двухфазной и пятифазной дискуссии. В руководстве описаны основные различия между обеими технологиями в ключевых областях работы шагового двигателя: разрешение, вибрация, крутящий момент, точность и синхронизм.Опытные сотрудники службы технической поддержки ORIENTAL MOTOR также готовы предоставить более подробные разъяснения по обеим технологиям.
2 фазы, 5 фаз, в чем разница?
Есть два ключевых различия между 2-фазными и 5-фазными шаговыми двигателями. Первый — механический. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор, в свою очередь, состоит из трех компонентов; чашка ротора 1, чашка ротора 2 и постоянный магнит. В двухфазном двигателе статор состоит из 8 магнитных полюсов с небольшими зубцами, а статор пятифазного двигателя состоит из 10 магнитных полюсов.Каждый полюс статора имеет обмотку.
Второе различие между 2-фазным и 5-фазным режимами — это количество фаз. Двухфазный двигатель имеет две фазы: фазу «А» и фазу «В», а 5-фазный двигатель — пять фаз. По сути, количество фаз относится к различным комбинациям полюсов, которые последовательно активируются для притяжения ротора.
2-фазное и 5-фазное прямое соединение
Как эти различия влияют на производительность? На производительность шагового двигателя влияет ряд факторов.Существует несколько способов управления шаговым двигателем, и привод сильно влияет на его характеристики. Wave Drive, Full Step, Half Step и Microstep — наиболее распространенные методы управления, каждый из которых предлагает очень разные характеристики. Не принимая во внимание различные методы привода, мы рассмотрим ключевые области производительности 2-фазных и 5-фазных шаговых двигателей.
Разрешение
Конструктивно 5-фазный шаговый двигатель не сильно отличается от 2-фазного. Ротор в обоих моторах имеет 50 зубьев.Разница в том, что поскольку 5-фазный двигатель имеет 10 полюсов, по 2 на фазу, ротор должен переместиться только на 1/10 шага зуба, чтобы выровняться со следующей фазой. В двухфазном двигателе ротор должен перемещаться на 1/4 шага зубьев, чтобы соответствовать следующей фазе (8 полюсов, по 4 на фазу).
Это приводит к тому, что 2-фазный режим имеет 200 шагов на оборот, 1,8 ° на шаг, а 5-фазный — 500 шагов на оборот, 0,72 ° на шаг. Повышенное разрешение 5-фазной схемы заложено в ее конструкции. В сочетании с микрошаговым драйвером 5-фазный двигатель может совершать шаги до 0.00288 °, однако точность позиционирования и повторяемость по-прежнему зависят от механической точности двигателя. Механическая точность как двухфазного, так и пятифазного двигателя составляет ± 3 угловых минуты (0,05 °).
Вибрация
Из-за меньших углов шага в 5-фазных шаговых двигателях, 0,72 ° по сравнению с 1,8 ° в 2-фазном двигателе, вибрация в 5-фазном двигателе намного меньше, чем в 2-фазном. График справа показывает вибрацию, создаваемую 5-фазным двигателем, в сравнении с вибрацией, создаваемой 2-фазным шаговым двигателем.Как видите, двухфазный двигатель производит гораздо большую вибрацию.
* Графики справа представляют микрошаг с шагом 5K на оборот. Эти графики были созданы путем присоединения генератора к двигателю с двумя валами. Когда двигатель вибрирует, генерируемое напряжение отображалось на графике. Чем сильнее вибрирует двигатель, тем больше генерируется напряжение.
Момент
Хотя существует небольшая разница между выходным крутящим моментом 2-фазного шагового двигателя и 5-фазного шагового двигателя, 5-фазный двигатель действительно имеет более «полезный» крутящий момент.Это в первую очередь связано с величиной пульсаций крутящего момента, которые производят оба двигателя.
Полушаговый или микрошаговый 5-фазный шаговый двигатель фактически увеличивает крутящий момент до 10% из-за большего числа фаз, находящихся под напряжением. Двухфазные двигатели теряют крутящий момент до 40% при полушаге и микрошаге, однако многие двухфазные драйверы компенсируют это за счет завышения вектора противоположного крутящего момента.
Когда статор находится под напряжением, он создает электромагнит, который притягивает магнитный поток ротора.Магнитный поток можно разбить на два вектора: нормальный и тангенциальный. Крутящий момент создается только при наличии тангенциальной составляющей. Наличие тангенциального потока показано на рисунке ниже.
В , рис. 1 , зубья ротора прямо выровнены с зубьями статора, а магнитный поток имеет только нормальную составляющую, поэтому крутящий момент не создается. Поскольку зубья ротора смещаются относительно зубьев статора на фиг. , рисунки 2, 3 и 4 , двигатель создает крутящий момент.Мы называем этот крутящий момент отрицательным, потому что крутящий момент пытается вернуть зубья в стабильное положение. На рис. 5 поток равномерно распределяется между зубьями статора, и крутящий момент не создается. Согласно , рисунки 6, 7 и 8, создается положительный крутящий момент, когда смещенные зубья ротора перемещаются, чтобы выровняться со следующими зубьями статора. Наконец, зубья ротора совпадают непосредственно со следующими зубьями статора (, рис. 1, ).
Каждая фаза двигателя вносит синусоидальную кривую изменения крутящего момента в общий выходной крутящий момент двигателя (показано ниже).Разница между пиком и впадиной называется пульсацией крутящего момента. Пульсация крутящего момента вызывает вибрацию, поэтому чем больше разница, тем сильнее вибрация.
Благодаря большему количеству фаз, составляющих общий крутящий момент двигателя, пульсации крутящего момента в 5-фазном двигателе значительно уменьшаются по сравнению с 2-фазным двигателем. Разница между пиком и спадом в двухфазном двигателе может достигать 29%, а в пятифазном — всего около 5%. Поскольку пульсация крутящего момента напрямую влияет на вибрацию, 5-фазный двигатель работает более плавно, чем 2-фазный.
Двухфазное смещение крутящего момента
5-фазное смещение крутящего момента
Точность / повторяемость
Точность состоит из двух компонентов: электрического и механического. Электрическая ошибка вызвана дисбалансом фаз. Например, сопротивление обмотки двигателя составляет ± 10%, возможно, что, хотя двигатель рассчитан на 10 Вт, одна фаза может быть 9,2 Вт, а другая фаза — 10.6Вт. Эта разница между фазами приведет к тому, что ротор будет больше ориентирован на одну фазу, чем на другую.
Есть несколько компонентов механической ошибки, главная из которых — конфигурация зубьев. Хотя предполагается, что зубья на двигателе должны быть квадратными, процесс штамповки и возраст штампа могут привести к скруглению некоторых зубцов или их частей. Вместо прямого потока магнитного потока он может течь в другом месте, если зубцы закруглены. Таким образом, эти факторы влияют на точность двигателя.
При использовании привода Full-Step 2-фазный двигатель повторяет состояния на каждом 4-м шаге, тогда как в 5-фазном двигателе состояния повторяются на каждом 10-м шаге. Любая электрическая ошибка, вызванная дисбалансом фаз, устраняется каждые 4 шага в 2-фазном режиме и каждый 10-й шаг в 5-фазном режиме, оставляя только механическую ошибку.
После того, как двигатель совершит полный оборот на 360 °, тот же зуб теперь выровнен в исходной начальной точке, что устраняет механическую ошибку. Поскольку двухфазный двигатель делает 200 шагов на оборот, он почти идеален каждые 200 шагов, в то время как 5-фазные двигатели делают 500 шагов на оборот и почти идеальны каждые 500 шагов.
Синхронизм
Поскольку 5-фазный шаговый двигатель перемещается только на 0,72 ° за шаг, для 5-фазного двигателя практически невозможно пропустить шаг из-за перерегулирования / недооценки. Двигатель теряет синхронизм или пропускает шаг, если зубья ротора не совпадают с правильными зубьями на статоре. Что может привести к неправильному выравниванию зубов? Во-первых, для того, чтобы зуб ротора не выровнялся должным образом, другой зуб должен быть выровнен там, где он должен был.Чтобы это произошло, ротор должен быть либо перерегулирован (прошел за правильный зуб статора), либо перекус (не переместился достаточно далеко, чтобы совместиться с правильным зубом статора) более чем на 3,6 °. Почему 3,6 °? Так как зубцы ротора притягиваются магнитным полем, правильный зуб должен находиться более чем на полпути между зубьями статора для совмещения (7,2 ° между зубьями ротора, деленные на 2, дают 3,6 °). Таким образом, когда ротор выходит за пределы правильного зубца статора более чем на 3,6 °, следующий зуб выравнивается на своем месте, в результате чего вы пропустите шаг.И наоборот, если ротор не может двигаться более чем на 3,6 °, текущий зуб ротора останется на одном уровне с зубом статора, и ротор не будет вращаться, что означает, что вы пропустили шаг.
Методы привода
Существует несколько методов привода как для 2-фазных, так и для 5-фазных шаговых двигателей. Вот краткий обзор концепций приводов Full-Step и Microstepping.
2-фазная система полного шага (1,8 ° / шаг)
Двухфазная система полного шага подает питание как на фазу A, так и на фазу B и переключается между положительной и отрицательной полярностью для создания вращения.
5-фазная полноступенчатая система (4-фазное возбуждение Pentagon) (0,72 ° / шаг)
4-фазная система возбуждения уникальна для 5-фазных двигателей и обеспечивает более стабильную работу.
Микрошаг
ДрайверыMicrostep делят основной угол шага двигателя, уменьшая ток до одной фазы и увеличивая ток до следующей фазы с приращениями. Это приводит к тому, что двигатель делает меньшие шаги. С микрошаговым драйвером основной шаг двигателя можно разделить на более мелкие шаги от 1/1 до 1/250.
На иллюстрациях справа представлена основная концепция микрошага.
- Рисунок 1 — фаза A имеет 100% ток, поэтому ротор выстраивается напрямую.
- Рисунок 2 — ток в фазе A уменьшен до 75%, в то время как 25% тока теперь находится в фазе B.
- Рисунок 3 — ток для фаз A и B составляет 50%, поэтому ротор располагается прямо посередине между ними.
- Рисунок 4 — фаза A теперь составляет 25%, а фаза B — 75%, поэтому ротор перемещается ближе к фазе B.
- Рисунок 5 — фаза A выключена, а фаза B находится на 100%, поэтому ротор, наконец, совпадает непосредственно с фазой B.
Путем микрошага двигателя в этом примере мы разделили базовые 500 шагов на оборот 5-фазного шагового двигателя на 5, увеличив их до 2500 шагов на оборот. Разрешение двигателя теперь 0,144 °.
Microstepping не только обеспечивает более высокое разрешение, но и обеспечивает более плавную работу, более низкую вибрацию и меньший шум, чем другие приводы.
Заключение
В зависимости от вашего конкретного применения может быть достаточно двухфазного двигателя. Однако 5-фазные шаговые двигатели предлагают более высокое разрешение, более низкую вибрацию, более высокие скорости ускорения и замедления (из-за меньших углов шага) и с меньшей вероятностью потеряют синхронизацию из-за перерегулирования / перерегулирования, чем 2-фазные шаговые двигатели. Для приложений, требующих высокой точности, низкого уровня шума и низкой вибрации, 5-фазная технология является лучшей.
Хотите узнать больше?
Команда технической поддержкиORIENTAL MOTOR и инженеры по приложениям будут работать с вами, чтобы определить лучшее решение для вашего приложения.2 фазы, 5 фаз, полный шаг, микрошаг? Опытные члены команды ORIENTAL MOTOR знают технологию от и до. Мы найдем подходящее решение в соответствии с вашими потребностями и объясним альтернативы. Позвоните по телефону 1-800-GO-VEXTA (468-3982), чтобы поговорить с членом группы технической поддержки ORIENTAL MOTOR.
.