Как определить параметры двигателя без шильдика?
Для замены или ремонта вышедшего из строя электродвигателя необходимо знать его характеристики. К основным параметрам двигателя относятся номинальная мощность, номинальный ток, напряжение питания, скорость вращения, схема подключения. Сведения о некоторых характеристиках содержатся на шильдике — табличке на корпусе двигателя. Однако иногда шильдик отсутствует, и параметры определяются по косвенным признакам.
Мощность и ток
Ориентировочно мощность электродвигателя можно определить по его габаритам и диаметру вала. При одинаковых размерах и большем диаметре вала мощность на валу будет больше, а частота оборотов – меньше.
Если двигатель уже подключен, то примерная мощность определяется по уставкам защитных устройств, через которые он питается (мотор-автомат, тепловое реле). Если привод подключен через преобразователь частоты, мощность будет равна либо меньше мощности ПЧ.
Еще один способ – включить двигатель на номинальную мощность, обеспечив нужную нагрузку на валу.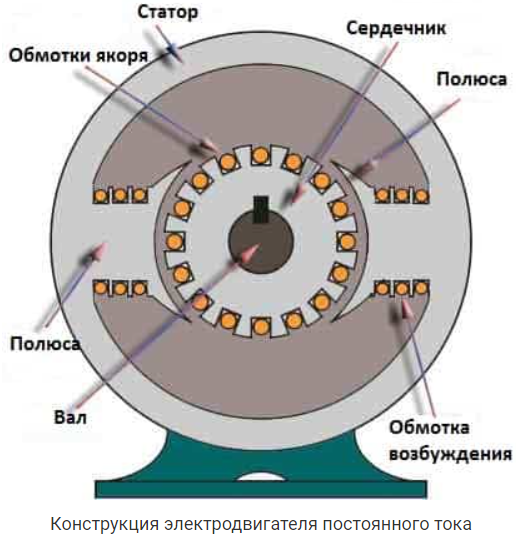
Также приблизительно оценить мощность асинхронного двигателя, подключенного по схеме «звезда», можно, разделив его номинальный измеренный ток на 2. Для двигателей менее 1,5 кВт из-за потерь ток нужно делить на 2,2…2,5, для мощности более 30 кВт этот эмпирический коэффициент будет равен 1,8…1,9.
Если нет шильдика, косвенно мощность можно определить и по сопротивлению обмоток, заодно проверив их целостность. Для этого необходимо измерить сопротивления при помощи омметра и сравнить их с сопротивлением двигателей известных мощностей, либо обратиться к информации от производителей.
Частота вращения
Как было сказано выше, частоту оборотов двигателя можно оценить по диаметру вала. Но есть и другие способы.
Согласно известной формуле, скорость вращения электродвигателя равна 60F/P, где F — частота питающей сети (50 Гц), Р – количество пар полюсов статора.
Полюсы можно посчитать, сняв переднюю или заднюю крышку. В двухполюсном электродвигателе (Р = 1) на каждую фазу приходится одна обмотка, содержащая 2 катушки, итого для трех фаз 6 катушек. Исходя из способа намотки нужно определить конфигурацию катушки, затем установить способ намотки всего статора. При количестве пар полюсов Р = 1 скорость вращения составит 3000 об/мин, при P = 2 – 1500 об/мин и так далее.
Отметим, что реальная скорость вращения двигателя отличается от расчетной за счет механических потерь и скольжения электромагнитного поля. У маломощных двигателей рабочая скорость под нагрузкой может быть ниже расчетной на 10-15 %.
Напряжение питания
Напряжение можно определить по схеме включения. Если двигатель подключен «звездой», его питающее линейное напряжение равно 380 В, а если «треугольником» – 220 В. Тогда в первом случае электродвигатель можно питать от сети напрямую, во втором – от однофазной сети через конденсатор или преобразователь частоты.
В большинстве новых двигателей для определения схемы включения достаточно вскрыть коробку борно. В ней расположены три пары проводов, подключенных по одной из схем, а на обратной стороне крышки борно указаны схемы и напряжения питания.
В двигателях, подвергшихся перемотке, схему собирают внутри, и из корпуса выводят три провода. В этом случае можно предположить, что напряжение питания равно 380 В и включить двигатель через защитный мотор-автомат. Если рабочее напряжение выше (660 В), двигатель будет вращаться замедленно, с пониженной мощностью. Если ниже (220 В), возникнет перегрузка, и сработает мотор-автомат, либо двигатель начнет перегреваться.
Заключение
Процесс определения параметров двигателя без шильдика часто бывает интуитивным, на основании опыта и последовательных измерений. Также важно при пробных включениях двигателя обеспечивать его защиту и электробезопасность.
Другие полезные материалы:
Выбор электродвигателя для компрессора
Подбор импортного аналога двигателя АИР
Принципы программирования ПЛК
Определение технических характеристик асинхронного двигателя
В данное статье речь пойдет о расчете таких технических характеристик асинхронного электродвигателя, которые не приводятся на щитке электродвигателя, а именно: число пар полюсов (число пар катушек на фазу), скольжение при номинальной нагрузке, полной мощности, активной мощности и потере в двигателе при номинальной нагрузке.
Пример.
На щитке асинхронного двигателя с короткозамкнутым ротором типа АИР71В4У2 имеются следующие обозначения:
- ∆/Y – схема соединения обмоток двигателя;
- 220/380 В; 3,4/1,94 А — при схеме соединения обмоток статора в треугольник, мы должны подключатся к напряжению 220 В, при схеме соединения обмоток статора в звезду подключаем напряжение 380 В, соответственно и переменный ток будет равен для соединения в треугольник при напряжении 220 В – 3,4 А, а при схеме соединения в звезду – 1,94 А.
Проверить данные по току, можно рассчитав по формулам:
Для схемы соединения треугольник:
Для схемы соединения звезда:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % — коэффициент полезного действия, характеризуется отношением номинальной (полезной) мощности развиваемой на валу, к активной мощности, потребляемой им из сети.
 Определяется по формуле:
Определяется по формуле:
 Определяется по формуле:
Определяется по формуле:- сosϕ = 0,78 – коэффициент мощности, для вычисления его достаточно активную мощность Р, разделить на полную мощность S:
Разобравшись какие технические данные представлены на щитке двигателя, перейдем теперь непосредственно к определению величин, о которых шла речь в начале статьи.
1. Определяем число пар полюсов по формуле:
Если нужно знать количество полюсов, формула будет иметь такой вид:
где:
f = 50 Гц – частота переменного тока;
2. Определяем скольжение при номинальной нагрузке:
где:
n1 – синхронная скорость двигателя, зависящая от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определяем полную мощность двигателя при номинальной нагрузке:
4. Определяем активную мощность, потребляемая двигателем при номинальной нагрузке:
5. Определяем потери в двигателе при номинальной нагрузке:
Всего наилучшего! До новых встреч на сайте Raschet. info.
info.
Поделиться в социальных сетях
Как с помощью мультиметра измерить обороты двигателя. Как определить обороты электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.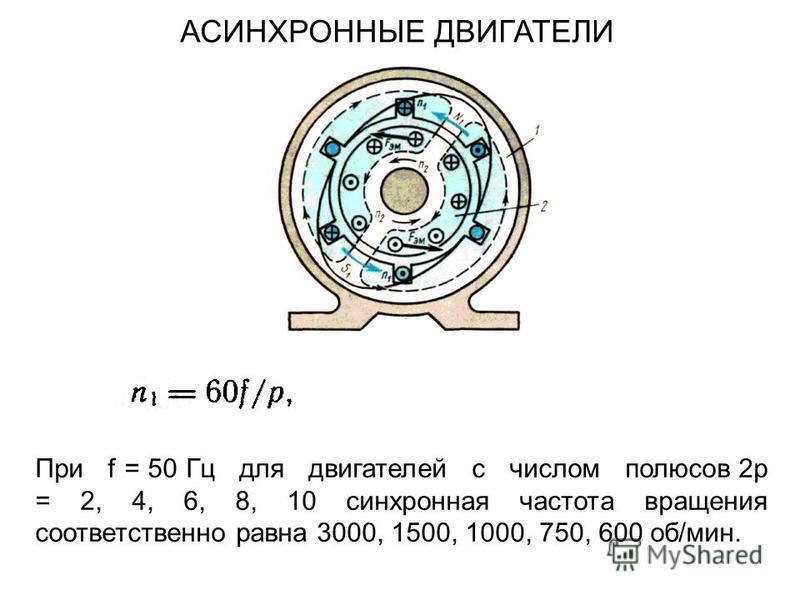
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — ) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
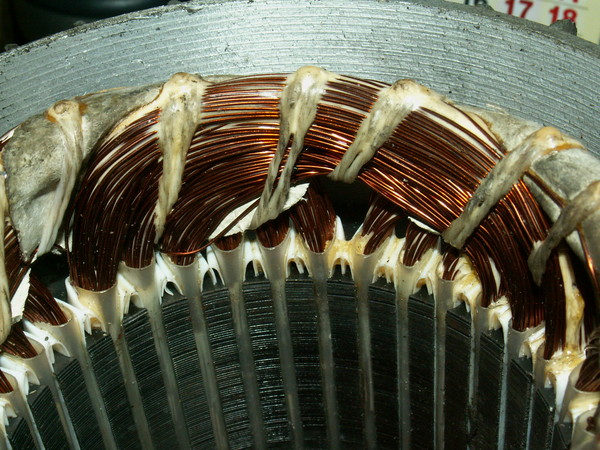
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
При покупке электродвигателя с рук рассчитывать на наличие технической документации к нему не приходится. Тогда встает вопрос о том, как узнать количество оборотов приобретаемого устройства. Можно довериться словам продавца, однако добросовестность не всегда является их отличительной чертой.
Тогда возникает проблема с определением числа оборотов. Решить ее можно, зная некоторые тонкости устройства мотора. Об этом и пойдет речь дальше.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Когда кольцо наполовину закрыто катушкой, число оборотов за минуту достигает 3000. Если закрывается третья часть кольца – число оборотов составляет примерно 1500. При четверти – число оборотов равно 1000.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Частотные преобразователи выступают в качестве надежных устройств, способных кардинальным образом менять частоту тока и форму сигнала.
 Их основу составляют полупроводниковые триоды (транзисторы) высокой мощности и модулятор импульсов.
Их основу составляют полупроводниковые триоды (транзисторы) высокой мощности и модулятор импульсов.Микроконтроллер управляет всем процессом работы преобразователя. Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования.
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:
Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.
Датчик давления устанавливается в емкости, посылает сигнал при достижении должного уровня, благодаря чему мотор останавливается.
Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.
Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.
Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.
Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.
Фото оборотов электродвигателя
Какой бы станок Вы ни собирали, наверняка не раз, испытывая станок, думали: нужен тахометр. А ведь он все время был у вас под рукой, конечно, если у Вас есть такие простейшие составляющие как маленький моторчик и вольтметр. Познакомьтесь с предлагаемым прибором, и убедитесь, что буквально через пять минут в вашем распоряжении окажется компактный и точный самодельный тахометр.
Познакомьтесь с предлагаемым прибором, и убедитесь, что буквально через пять минут в вашем распоряжении окажется компактный и точный самодельный тахометр.Итак, приступаем к сборке. Как уже упоминалось самодельный тахометр состоит из двух основных частей: моторчика работающего от постоянного тока и вольтметра. Если такого моторчика у Вас нет, его легко можно купить на блошином рынке по цене буханки хлеба или дешевле, по цене двух буханок можно купить новый в магазине электронных компонентов. Если нет вольтметра, он обойдется дороже моторчика, однако на том же блошином рынке его цена будет вполне приемлемой. Вольтметр подключается к контактам моторчика, и все, тахометр готов. Теперь нужно испытать готовый тахометр в работе. При вращении вала моторчика-генератора будет создаваться напряжение, пропорциональное частоте вращения. Следовательно, частоте вращения будут пропорциональны и показания вольтметра.
Проградуировать такой тахометр можно по-разному. Например, построить справочный график зависимости напряжения от частоты вращения якоря или сделать новую шкалу вольтметра, на которой вместо воль записывается число оборотов.
Так как график отражает линейную зависимость, достаточно отметить две-три точки и провести через них прямую. Получение контрольных точек — это самый проблемный этап подготовки самодельного тахометра к работе. Если есть доступ к фирменным станкам, контрольные точки легко получить, зажав резиновую трубочку, надетую на вал моторчика, в патроне сверлильного или токарного станка и включая станок на различных передачах, фиксировать показания вольтметра (скорость вращения шпинделя на каждой передаче указана в паспорте станка). В противном случае для калибровки придется использовать либо дрель, либо двигатель при режиме работы для которого известна частота вращения. И даже если удалось измерить напряжение на контактах моторчика только для одной частоты вращения, вторая точка — это пересечение осей (x) и (y) (то есть числа оборотов и напряжения), правда точность измерений по зависимости основанной на двух точках будет низкой.
Для измерения частоты вращения, вал исследуемого двигателя соединяется с моторчиком небольшим отрезком резиновой трубки или с помощью различных переходников. Если вольтметр зашкаливает при измерении больших скоростей вращения, в схему вводится переключатель с дополнительными резисторами. Потребуется и перестроение графика для каждого положения переключателя.
Если вольтметр зашкаливает при измерении больших скоростей вращения, в схему вводится переключатель с дополнительными резисторами. Потребуется и перестроение графика для каждого положения переключателя.
Возможности прибора можно значительно расширить. Если изготовить роликовый фрикционный переходник диаметром 31,8 мм, тахометр позволит измерять и линейную скорость, выраженную в метрах в минуту. Для этого количество оборотов в минуту, определенное по графику, делят на 10.
Точность измерения зависит практически только от тщательности построения графика и цены деления вольтметра. Подобный простейший и очень дешевый самодельный тахометр может найти широкое применение всюду, где нужно быстро определить частоту или скорость вращения валов, шкивов и других деталей.
Цифровой тахометр из смартфона своими руками
Если Вы являетесь обладателем iPhone, то очень советую установить лучшее приложение для измерения оборотов показанное ниже. И не останавливайтесь на стробоскопе из вспышки телефона, это всего лишь поможет понять как работает стробоскоп-тахометр. Сделав своими руками очень простые электронные схемы, Вы получите стробоскопический и лазерный тахометры не уступающие (а в некоторых ситуациях превосходящие) фирменным тахометрам. Схемы, фото и описание тахометров найдете в этом приложении. Видео с демонстрацией этого приложения смотрите ниже.
Сделав своими руками очень простые электронные схемы, Вы получите стробоскопический и лазерный тахометры не уступающие (а в некоторых ситуациях превосходящие) фирменным тахометрам. Схемы, фото и описание тахометров найдете в этом приложении. Видео с демонстрацией этого приложения смотрите ниже.
Самодельный стробоскопический тахометр из iPhone своими руками
Самодельный лазерный (оптический) тахометр из iPhone своими руками
Сравнительные измерения частоты вращения двигателя лазерным и стробоскопическим тахометрами
При использовании содержания данного сайта, нужно ставить активные ссылки на этот сайт, видимые пользователями и поисковыми роботами.
Иногда в процессе работы необходимо определить количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далеко не каждый электрик с этой задачей может справиться. Но в этом нужно разбираться. Определить количество оборотов электродвигателя очень легко и просто.
Определяем его по обмотке. Для этого надо снять крышку двигателя. Лучше это проделывать с задней крышкой, т. к. шкив или полумуфту снимать не надо.
Для этого надо снять крышку двигателя. Лучше это проделывать с задней крышкой, т. к. шкив или полумуфту снимать не надо.
Достаточно снять кожух охлаждения и крыльчатку — и крышка двигателя окажется доступна. После снятия крышки обмотку видно достаточно хорошо. Найдите одну секцию и смотрите, сколько места она занимает по окружности круга (статора). А теперь запоминайте: если катушка занимает половину круга (180 град.), это двигатель на 3000 об./мин.
Если в окружности вместится три секции (120 град.), это двигатель 1500 об./мин. Если в статоре вмещается четыре секции (90 град.), этот двигатель на 1000 об./мин.
Вот так совсем просто можно определить количество оборотов «неизвестного» электродвигателя. На представленных рисунках это видно хорошо.
Это метод определения подходит, когда катушки обмоток намотаны секциями. А бывают обмотки «всыпные», и тут данный методом не подойдет. Но «всыпные» обмотки встречается редко.
Есть еще один метод определения количества оборотов. В роторе электродвигателя есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем вращать ротор. Эту ЭДС можно «поймать» миллиамперметром. Наша задача заключается в следующем: нужно найти обмотку одной фазы, независимо от того как соединены обмотки, треугольником или звездой. К кончикам обмотки подключаем миллиамперметр. Вращая вал двигателя, смотрим, сколько раз отклонится стрелка миллиамперметра за один оборот ротора.
В роторе электродвигателя есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем вращать ротор. Эту ЭДС можно «поймать» миллиамперметром. Наша задача заключается в следующем: нужно найти обмотку одной фазы, независимо от того как соединены обмотки, треугольником или звездой. К кончикам обмотки подключаем миллиамперметр. Вращая вал двигателя, смотрим, сколько раз отклонится стрелка миллиамперметра за один оборот ротора.
Вот по этой таблице можно посмотреть, что за двигатель перед вами:
- (2p) 2 3000 r/min;
- (2p) 4 1500 r/min;
- (2p) 6 1000 r/min;
- (2p) 8 750 r/min.
В СССР выпускался прибор ТЧ10-Р, может, у кого сохранился. Для тех, кто не видел и не знал о таком измерителе, прилагаю фото. В комплекте имеется две насадки: для измерения оборотов по оси вала и для измерения по окружности вала.
Измерить колличество оборотов можно и с помощью цифрового лазерного тахометра
Технические характеристики:
- Диапазон: 2,5 об / мин ~ 99999 об / ми.
- Разрешение / шаг: 0,1 об / мин для диапазона 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и более.
- Точность: + / – 0,05%.
- Рабочее расстояние: 50mm ~ 500mm.
- Также указывается минимальное и максимальное значение.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Определение скорости при помощи графического рисунка
Для определения скорости вращения двигателя существует графических рисунков круглой формы. Суть в том, что приклеенный на торец вала бумажный кружок с заданным узором при вращении образует определенный графический эффект при освещении источником света с частотой в 50Гц.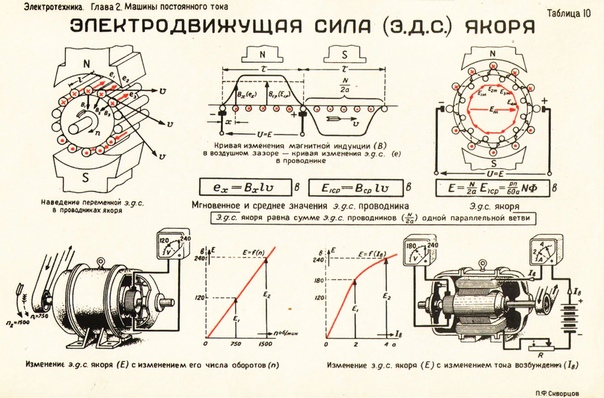 Таким образом, перебрав несколько рисунков и сравнив результат с табличными данными можно определить номинальную скорость вращения двигателя.
Таким образом, перебрав несколько рисунков и сравнив результат с табличными данными можно определить номинальную скорость вращения двигателя.Типовые характеристики по монтажным размерам
Промышленные производства СССР, как и большинство современных, производились по государственным стандартам и имеют установленную таблицу соответствия. Исходя из этого, можно замерить высоту центра вала относительно плоскости посадки, его и задний диаметры, а также размеры крепежных отверстий. В большинстве случаев этих данных будет достаточно, чтобы найти в таблице нужный двигатель и не только определить частоту вращения, но и установить его электрическую и полезную мощность.При помощи механического тахометра
Очень часто нужно определить не только номинальную характеристику электрической машины, но и знать точное количество оборотов в данный момент. Это делается при диагностике электрических двигателей и для определения точного показателя коэффициента скольжения.В электромеханических лабораториях и на производстве используются специальные приборы — тахометры. Если получить доступ к такому оборудованию, измерить частоту вращения асинхронного двигателя можно за несколько секунд. Тахометр имеет стрелочный или цифровой циферблат и измерительную штангу, на конце которой имеется отверстие с шариком. Если смазать центровочное отверстие на валу вязким воском и плотно приставить измерительную штангу к нему, на циферблате отобразится точное количество оборотов в минуту.
Если получить доступ к такому оборудованию, измерить частоту вращения асинхронного двигателя можно за несколько секунд. Тахометр имеет стрелочный или цифровой циферблат и измерительную штангу, на конце которой имеется отверстие с шариком. Если смазать центровочное отверстие на валу вязким воском и плотно приставить измерительную штангу к нему, на циферблате отобразится точное количество оборотов в минуту.
При помощи детектора стробоскопического эффекта
Если двигатель находится в процессе эксплуатации, можно избежать необходимости отстыковывать его от исполнительного механизма и снимать задний кожух только для того, чтобы добраться до центровочного отверстия. Точное количество оборотов в этих случаях можно также измерить при помощи стробоскопического детектора. Для этого на вал двигателя наносят продольную риску белого цвета и устанавливают светоулавливатель прибора напротив нее.При включении двигателя в работу прибор определит точное количество оборотов в минуту по частоте появления белого пятна. Этот метод применяется, как правило, при диагностическом обследовании мощных электрических машин и зависимости частоты вращения от приложенной нагрузки.
Этот метод применяется, как правило, при диагностическом обследовании мощных электрических машин и зависимости частоты вращения от приложенной нагрузки.
Использование кулера от персонального компьютера
Для проведения измерений частоты вращения двигателя можно использовать весьма оригинальный метод. В нем применяется лопастной вентилятор охлаждения от персонального компьютера. Пропеллер крепится к торцу вала при помощи двустороннего скотча, а рама вентилятора удерживается вручную. Провод вентилятора подключается к любому из разъемов материнской платы, на котором можно провести измерения, при этом само питание на кулер подавать не нужно. Точный показатель частоты вращения можно получить через утилиту BIOS или диагностическую утилиту, работающую под управлением операционной системы.Как определить мощность и частоту оборотов электродвигателя
Возникла необходимость узнать мощность или частоту оборотов вала и другие параметры электродвигателя, но после внимательного осмотра на его корпусе не нашлось таблички (шылдика) с его наименованием и техническими параметрами. Придется определять самому, для этого есть несколько способов и мы их рассмотрим ниже.
Придется определять самому, для этого есть несколько способов и мы их рассмотрим ниже.
Чтоб осознать, как это работает, нам понадобится 2 величины: сила тока и напряжение. Сила тока — численность тока, которое проходит через поперечное сечение за некий отрезок времени, ее принято определять в амперах. Напряжение — значение, равная работе по перемещению заряда меж 2-мя точками цепи, ее принято определять в вольтах.
Для расчета мощности используется формула N = A/t, где:
N — мощность;
А — работа;
t — время.
Часто электродвигатель поступает с завода с уже указанными техническими параметрами. Но заявленная мощность не всегда соответствует фактической, а скорее всего она может значить лишь максимальную мощность электропотока.
Так что если на вашем электроинструменте указана, например, мощность в 500 ват, это совсем не значит что инструмент будит потреблять точно 500 ват.
Электродвигатели производят стандартной дискретной мощности, линейки типа 1.5, 2.2, 4 кВт.
Опытный электрик может легко отличить 1.5 от 2.2 кВт всего лишь взглянув на его габариты. Помимо этого он сможет определить количество оборотов двигателя по размеру статора, количеству пар полюсов и диаметра вала.Еще более опытным в этом деле окажется обмотчик, специалист который занимается перемоткой электродвигателей со 100%-ой уверенностью определит технические параметры вашего электродвигателя.
Если табличка с характеристиками двигателя потеряна для подсчета мощности двигателя нужно измерить силу тока на обмотках ротора и с помощью стандартной формулы найти потребляемую мощность электродвигателя.
Основные способы определения мощности двигателя
Определение мощности по току. Для этого подключаем двигатель в сеть и контролируем напряжение. Затем поочередно, в цепь каждой из обмоток статора включаем амперметр и замеряем потребляемый ток. После того как мы нашли суму потребляемых токов, полученное число необходимо умножить на фиксированное напряжение в результате получим число определяющее мощность электродвигателя в ваттах.
После того как мы нашли суму потребляемых токов, полученное число необходимо умножить на фиксированное напряжение в результате получим число определяющее мощность электродвигателя в ваттах.
Определяем мощность по габаритам. Нужно измерить диаметр сердечника (с внутренней стороны) и его длину.
Дальше если знаем частоту сети нужно узнать синхронную частоту вращения вала.
Умножаем синхронную частоту вращения вала на диаметр сердечника (в сантиметрах) полученную цифру умножаем на 3.14 затем разделяем на частоту сети умноженную на 120. Полученное значение мощности будит в киловаттах.
Замер по счетчику. Способ считается самым простым. Для этого, для чистоты эксперимента, отключаем все нагрузки в доме. Дальше необходимо включить двигатель на определенное время (например 10 минут) На щетчике будит видно разницу в киловаттах по ней уже легко можно высчитать сколько киловаттах потребляет двигатель. Удобней всего будит воспользоваться портативным электросчетчиком который показывает потребление в киловаттах (ваттах) в режиме реального времени.
Для определения реального показателя мощности, которую выдает двигатель, необходимо найти скорость валового вращения, измеряемую в числе оборотов за секунду, тяговое усилие двигателя.
Частота вращения умножается последовательно на 6,28, показатель силы и радиус вала, который можно вычислить при помощи штангенциркуля. Найденное значение мощности выражается в ваттах.
Определяем рабочее количество оборотов двигателя.
Самый быстрый способ — посчитать количество катушек (катушечных групп) Определяем мощность по расчетным таблицам. С помощью штангенциркуля замеряем диаметр вала, длину мотора (без выступающего вала) и расстояние до оси.Замеряем вылет вала и его выступающую часть, диаметр фланца если он есть, а также расстояние крепежных отверстий. По этим данным с помощью сводной таблицы можно легко определить мощность двигателя и другие характеристики1,1 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 71 | 80 | 80 |
| Диаметр вала d1, мм | 19 | 22 | 22 |
| Крепление лап по ширине b10, мм | 112 | 125 | 125 |
| Крепление лап по длине L10, мм | 90 | 100 | 100 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 165 | 165 |
| Замок фланца d25, мм | 130 | 130 | 130 |
1,5 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 80 | 80 | 90 |
| Диаметр вала d1, мм | 22 | 22 | 24 |
| Крепление лап по ширине b10, мм | 125 | 125 | 140 |
| Крепление лап по длине L10, мм | 100 | 100 | 125 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 165 | 215 |
| Замок фланца d25, мм | 130 | 130 | 180 |
2,2 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 80 | 90 | 100 |
| Диаметр вала d1, мм | 22 | 24 | 28 |
| Крепление лап по ширине b10, мм | 125 | 140 | 160 |
| Крепление лап по длине L10, мм | 100 | 125 | 140 |
| Крепление фланца по центрам отверстий d20, мм | 165 | 215 | 215 |
| Замок фланца d25, мм | 130 | 180 | 180 |
4 КВТ
| Обороты в минуту | 3000 об/мин | 1500 об/мин | 1000 об/мин |
| Габариты h, мм | 100 | 100 | 112 |
| Диаметр вала d1, мм | 28 | 28 | 32 |
| Крепление лап по ширине b10, мм | 160 | 160 | 190 |
| Крепление лап по длине L10, мм | 112 | 140 | 140 |
| Крепление фланца по центрам отверстий d20, мм | 215 | 215 | 265 |
| Замок фланца d25, мм | 180 | 180 | 230 |
Как рассчитать обмотку электродвигателя | Полезные статьи
Длительная эксплуатация асинхронных электродвигателей в режиме перегрузки или повышенное напряжение питающей сети в конечном итоге приводят к перегреву обмоток статора и возникновению межвитковых замыканий и пробою на корпус. В результате потребуется ремонт электрической машины с заменой статорных обмоток.
В результате потребуется ремонт электрической машины с заменой статорных обмоток.
Если в документации на двигатель есть все обмоточные данные, то эта задача для квалифицированного персонала не составит особого труда. Но при отсутствии таковых восстановление электромашины становится более затруднительным. Перед перемоткой потребуется замерить диаметр обмоточного провода, посчитать количество витков в пазу, зарисовать схему расположения обмоток и их шаг, схему соединения обмоток и прочее.
Даже при сохранении необходимой исходной частоты вращения и мощности двигателя могут возникнуть затруднения, если в наличии не окажется провода нужного диаметра. Обмотка, выполненная проводом меньшего диаметра, будет изначально перегреваться даже в режиме номинальной нагрузки. При использовании проводников с большим диаметром существует вероятность того, что при сохранении исходного числа витков в катушке ее габариты не позволят уложить обмотку в пазы сердечника статора.
Кроме того, может возникнуть необходимость изменить частоту вращения ротора или величину питающего напряжения. Для этого требуется выполнить расчет обмотки электродвигателя.
Для этого требуется выполнить расчет обмотки электродвигателя.
Сущность этих расчетов сводится к нахождению оптимального соотношения между магнитными и электрическими характеристиками. Говоря более простым языком, требуется определить нужное количество витков для каждой фазы обмотки.
Какие данные нужны для расчета обмотки
Для выполнения расчетов необходимо предварительно очистить железо статора от остатков старой обмотки и изоляции. Важно помнить, что применение абразивных средств недопустимо. После этого производятся следующие замеры.
D — внутренний диаметр сердечника статора. Измерения выполняются штихмассом или штангенциркулем. Допускается использовать кронциркуль для внутренних измерений и масштабную линейку. Для большей точности делается несколько замеров, выполненных между центрами диаметрально расположенных зубцов, и вычисляется среднее значение.
Da – наружный диаметр сердечника по возможности измеряется с использованием штангенциркуля или кронциркуля для наружных замеров.
hс – высота тела статора определяется с помощью штангенциркуля.
l – полная длина сердечника. Замер производится масштабной линейкой по дну зубцов.
h – полная глубина зубца
Z1 – количество зубцов (пазов) статора.
Нужно учитывать форму и размеры пазов статора для последующего определения их объема.
Чтобы выполнить расчет обмотки асинхронного электродвигателя также нужно знать толщину электротехнической стали статора и тип ее изоляции, а также количество вентиляционных поперечных каналов, их ширину или диаметр (если таковые есть).
Обработка результатов измерений
Первоначально определяют величину полюсного деления. Этот параметр измеряется в миллиметрах и определяет длину части окружности внутренней расточки, на которой будет располагаться один полюс электродвигателя.
τ=3,14*D/2p, мм
где p – количество пар полюсов
Далее определяется расчетная длина статора (l). Если в статоре отсутствуют вентиляционные каналы, то эта величина остается равной измеренной.Если в конструкции сердечника есть вентиляционные каналы, то для дальнейших расчетов из измеренной длины вычитается произведение количества пазов на их ширину. Однако в расчетах обмотки используется чистая длина стали lо, вычисляемая по формуле
Если в статоре отсутствуют вентиляционные каналы, то эта величина остается равной измеренной.Если в конструкции сердечника есть вентиляционные каналы, то для дальнейших расчетов из измеренной длины вычитается произведение количества пазов на их ширину. Однако в расчетах обмотки используется чистая длина стали lо, вычисляемая по формуле
lо=l*kо.
Величина этого коэффициента (kо) зависит от толщины листов электротехнической стали и типа изоляции между ними.
Потом определяется площадь полюсного деления по формуле:
Qв=l*τ
Площадь поперечного сечения всего тела статора высчитывают по формуле:
Qс=hс*lо
Число пазов на один полюс и фазу рассчитывают по формуле:
Q=Z1/6p
Формулы для определения площади пазов в зависимости от их формы есть на рис.2.
К сожалению, формат обзорной статьи не дает возможности полностью раскрыть эту тему, но зная данные и используя рекомендации из пособия Г. К. Жерве «Как рассчитать обмотку асинхронного двигателя» можно вычислить диаметр обмоточного провода, количество витков в катушках и подобрать шаг и схему их укладки. Следует помнить, что расчет обмотки однофазного электродвигателя имеет свои особенности.
К. Жерве «Как рассчитать обмотку асинхронного двигателя» можно вычислить диаметр обмоточного провода, количество витков в катушках и подобрать шаг и схему их укладки. Следует помнить, что расчет обмотки однофазного электродвигателя имеет свои особенности.
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту [email protected] с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Как определить обороты электродвигателя. Как определить скорость вращения электродвигателя Как измерить обороты двигателя
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Итак, приступаем к сборке. Как уже упоминалось самодельный тахометр состоит из двух основных частей: моторчика работающего от постоянного тока и вольтметра. Если такого моторчика у Вас нет, его легко можно купить на блошином рынке по цене буханки хлеба или дешевле, по цене двух буханок можно купить новый в магазине электронных компонентов. Если нет вольтметра, он обойдется дороже моторчика, однако на том же блошином рынке его цена будет вполне приемлемой. Вольтметр подключается к контактам моторчика, и все, тахометр готов. Теперь нужно испытать готовый тахометр в работе. При вращении вала моторчика-генератора будет создаваться напряжение, пропорциональное частоте вращения. Следовательно, частоте вращения будут пропорциональны и показания вольтметра.
Проградуировать такой тахометр можно по-разному. Например, построить справочный график зависимости напряжения от частоты вращения якоря или сделать новую шкалу вольтметра, на которой вместо воль записывается число оборотов.
Так как график отражает линейную зависимость, достаточно отметить две-три точки и провести через них прямую. Получение контрольных точек — это самый проблемный этап подготовки самодельного тахометра к работе. Если есть доступ к фирменным станкам, контрольные точки легко получить, зажав резиновую трубочку, надетую на вал моторчика, в патроне сверлильного или токарного станка и включая станок на различных передачах, фиксировать показания вольтметра (скорость вращения шпинделя на каждой передаче указана в паспорте станка). В противном случае для калибровки придется использовать либо дрель, либо двигатель при режиме работы для которого известна частота вращения. И даже если удалось измерить напряжение на контактах моторчика только для одной частоты вращения, вторая точка — это пересечение осей (x) и (y) (то есть числа оборотов и напряжения), правда точность измерений по зависимости основанной на двух точках будет низкой.
Для измерения частоты вращения, вал исследуемого двигателя соединяется с моторчиком небольшим отрезком резиновой трубки или с помощью различных переходников. Если вольтметр зашкаливает при измерении больших скоростей вращения, в схему вводится переключатель с дополнительными резисторами. Потребуется и перестроение графика для каждого положения переключателя.
Возможности прибора можно значительно расширить. Если изготовить роликовый фрикционный переходник диаметром 31,8 мм, тахометр позволит измерять и линейную скорость, выраженную в метрах в минуту. Для этого количество оборотов в минуту, определенное по графику, делят на 10.
Точность измерения зависит практически только от тщательности построения графика и цены деления вольтметра. Подобный простейший и очень дешевый самодельный тахометр может найти широкое применение всюду, где нужно быстро определить частоту или скорость вращения валов, шкивов и других деталей.
Цифровой тахометр из смартфона своими руками
Если Вы являетесь обладателем iPhone, то очень советую установить лучшее приложение для измерения оборотов показанное ниже. И не останавливайтесь на стробоскопе из вспышки телефона, это всего лишь поможет понять как работает стробоскоп-тахометр. Сделав своими руками очень простые электронные схемы, Вы получите стробоскопический и лазерный тахометры не уступающие (а в некоторых ситуациях превосходящие) фирменным тахометрам. Схемы, фото и описание тахометров найдете в этом приложении. Видео с демонстрацией этого приложения смотрите ниже.
Самодельный стробоскопический тахометр из iPhone своими руками
Самодельный лазерный (оптический) тахометр из iPhone своими руками
Сравнительные измерения частоты вращения двигателя лазерным и стробоскопическим тахометрами
При использовании содержания данного сайта, нужно ставить активные ссылки на этот сайт, видимые пользователями и поисковыми роботами.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Определение скорости при помощи графического рисунка
Для определения скорости вращения двигателя существует графических рисунков круглой формы. Суть в том, что приклеенный на торец вала бумажный кружок с заданным узором при вращении образует определенный графический эффект при освещении источником света с частотой в 50Гц. Таким образом, перебрав несколько рисунков и сравнив результат с табличными данными можно определить номинальную скорость вращения двигателя.Типовые характеристики по монтажным размерам
Промышленные производства СССР, как и большинство современных, производились по государственным стандартам и имеют установленную таблицу соответствия. Исходя из этого, можно замерить высоту центра вала относительно плоскости посадки, его и задний диаметры, а также размеры крепежных отверстий. В большинстве случаев этих данных будет достаточно, чтобы найти в таблице нужный двигатель и не только определить частоту вращения, но и установить его электрическую и полезную мощность.При помощи механического тахометра
Очень часто нужно определить не только номинальную характеристику электрической машины, но и знать точное количество оборотов в данный момент. Это делается при диагностике электрических двигателей и для определения точного показателя коэффициента скольжения.В электромеханических лабораториях и на производстве используются специальные приборы — тахометры. Если получить доступ к такому оборудованию, измерить частоту вращения асинхронного двигателя можно за несколько секунд. Тахометр имеет стрелочный или цифровой циферблат и измерительную штангу, на конце которой имеется отверстие с шариком. Если смазать центровочное отверстие на валу вязким воском и плотно приставить измерительную штангу к нему, на циферблате отобразится точное количество оборотов в минуту.
При помощи детектора стробоскопического эффекта
Если двигатель находится в процессе эксплуатации, можно избежать необходимости отстыковывать его от исполнительного механизма и снимать задний кожух только для того, чтобы добраться до центровочного отверстия. Точное количество оборотов в этих случаях можно также измерить при помощи стробоскопического детектора. Для этого на вал двигателя наносят продольную риску белого цвета и устанавливают светоулавливатель прибора напротив нее.При включении двигателя в работу прибор определит точное количество оборотов в минуту по частоте появления белого пятна. Этот метод применяется, как правило, при диагностическом обследовании мощных электрических машин и зависимости частоты вращения от приложенной нагрузки.
Использование кулера от персонального компьютера
Для проведения измерений частоты вращения двигателя можно использовать весьма оригинальный метод. В нем применяется лопастной вентилятор охлаждения от персонального компьютера. Пропеллер крепится к торцу вала при помощи двустороннего скотча, а рама вентилятора удерживается вручную. Провод вентилятора подключается к любому из разъемов материнской платы, на котором можно провести измерения, при этом само питание на кулер подавать не нужно. Точный показатель частоты вращения можно получить через утилиту BIOS или диагностическую утилиту, работающую под управлением операционной системы.При эксплуатации любой машины не обойтись без электродвигателя. Многие покупают электродвигатель с рук без какой-либо документации. В такой ситуации возникает проблема с определением оборотов электродвигателя. Чтобы решить данную проблему, можно использовать несколько способов.
Самый простой способ определения оборотов электродвигателя – использование тахометра. Но наличие данного прибора у человека, не специализирующегося на электродвигателях, большая редкость. Поэтому существуют способы определения оборотов на глаз. Для определения оборотов электродвигателя откройте одну из крышек электродвигателя и найдите катушку обмотки. Катушек в электродвигателе может быть несколько. Выберете ту катушку, которая находится в зоне видимости и к которой проще доступ. Старайтесь не нарушить целостность электродвигателя, не доставайте детали. Не пробуйте отсоединить детали между собой.Все основные характеристики электродвигателя должны быть указаны на металлической бирке, располагающейся на его корпусе. Но на практике бирка или отсутствует, или информация стерлась в течение эксплуатации.
Как определить мощность электродвигателя?
Какими способами можно определить мощность электродвигателя?
Электрический двигатель представляет собой электрическую машину, роль которой заключается в преобразовании электрической энергии в энергию механическую.
Нередко случаются ситуации, когда технический паспорт электродвигателя теряется, а маркировка на корпусе стирается в силу времени. В таком случае определить мощность электродвигателя становится сложно. Но существует несколько способов, которые помогут Вам справиться с подобной проблемой.
Определить мощность электродвигателя можно следующими способами:
- используя практические измерения;
- таблицы;
- исходя из количества оборотов в минуту;
- по габаритам;
- на основе мощности, которая выдается двигателем.
Практическое определение мощности электродвигателя
Наиболее простым и доступным каждому способом определить мощность электродвигателя является снятие показаний счетчика электрической энергии.
Изначально необходимо отключить все бытовые электроприборы, выключить свет во всем помещении. Важно помнить, что работа даже небольшой маломощной лампочки может сильно исказить показания.
Обратите внимание на то, чтобы счетчик оставался неподвижным, а индикатор не мигал (все зависит от модели электрического счетчика).
В случае со счетчиком марки «Меркурий» процесс существенно облегчается, поскольку данная модель устройства отображает нагрузку в киловаттах (кВт). Следовательно, будет достаточно просто включить электродвигатель на всю мощность и посмотреть показания на счетчике.
В ситуации с индукционным счетчиком определить мощность электродвигателя будет несколько сложнее, поскольку учет ведется в киловаттах в час (кВт/ч). Сначала требуется записать показания счетчика до того, как включите мотор. После включения двигатель должен поработать в течение 10 минут. Для отслеживания времени пользуйтесь секундомером, точность периода работы очень важна. По прошествии 10 минут снимите новые показания счетчиков и способом вычитания выявите разницу. Разницу умножьте на 6. Итоговый результат будет обозначать мощность электродвигателя в киловаттах (кВт).
Определить мощность электродвигателя небольшой силы еще сложнее. Для этого нужно узнать количество оборотов (импульсов), равных 1 кВт/ч. Данную информацию Вы отыщите на счетчике. Возьмем для примера 1600 оборотов (в некоторых моделях вспышек индикатора). Итак, если при функционирующем электродвигателе электросчетчик совершает 20 об/мин, данную цифру нужно умножить на 60, т.е. количество минут в часе. В итоге получаем 1200 об/мин. После имеющиеся 1600 оборотов в минуту делим на 1200, получаем 1,3, что и являет собой мощность электродвигателя.
Определение мощности электродвигателя по таблицам
Сегодня люди за помощью все чаще обращаются к интернету, ведь там можно найти абсолютно любую информацию. Также при помощи глобальной сети Вы можете определить мощность электродвигателя по диаметру вала.
Для использования данного метода вычисления достаточно в интернете отыскать технические таблицы для распознавания типа мотора и его мощности, а также снять необходимые параметры (диаметр вала и частота его вращения, крепежные габариты, при фланцевом двигателе – диаметр фланца, расстояние до центра вала и расстояние до оси, длина мотора без выпирающего элемента вала).
Важно при таком способе быть терпеливым и внимательным, чтобы точно измерить все показатели и получить точный результат.
Как определить мощность электродвигателя по числу оборотов за одну минуту?
Применение данного способа для определения мощности электродвигателя требует визуального определения числа обмоток статора. Также необходимо применение специальных измерительных приборов, таких как тестер или миллиамперметр. для распознавания количества полюсов, чтобы избежать разбора мотора.
Измерительный прибор подключается к одной из обмоток. Вал при этом нужно вращать равномерно и постепенно. Отклонение стрелки и будет показывать количество полюсов. Важно учитывать тот факт, что частота вращения вала при таком способе определения мощности будет немного ниже полученного результата.
Определение мощности электродвигателя на основе его габаритов
Данный способ используется в основном для определения мощности трехфазных электродвигателей.
Для расчета мощности по габаритам необходимо знать:
- диаметр сердечника (см) – D. Измерение происходит во внутренней части статора. При этом необходимо знать длину сердечника, учитывая вентиляционные отверстия;
- показатель частоты валового вращения – n;
- частота сети – f.
Используя данные значения, вычисляется полюсное деление. Для этого показатель диаметра (D) умножается на частоту валового вращения (n) и на число Пи. Итоговую цифру обозначим условно А.
Показатель частоты сети f умножается на 120, получаем (условно) В.
Получив значения А и В, осуществляем их деление, а именно: число А делим на число В. В итоге получаем необходимый нам показатель мощности электродвигателя.
На самом деле все не так уж сложно, достаточно вспомнить уроки математики в школе.
Способ определения по показателю мощности, что выдает электродвигатель
В данном случае необходимо снова обратиться к знаниям школьной математики, а также использовать калькулятор для точного вычисления.
Сначала узнайте количество оборотов вала в секунду (А), тяговое усилие мотора (В) и радиус вала (С). Подставьте значения в следующую формулу: Аx6,28xBxC. Результат и есть мощность электродвигателя.
Зная мощность электродвигателя, Вы без труда сможете выбрать необходимое сопутствующее оборудование (тепловые реле и автоматические выключатели). Также, знание данного показателя поможет Вам легко и быстро узнать пропускную способность и норму сечения кабельно-проводниковой продукции для подсоединения двигателя к сети. Самое главное – Вы сможете использовать электродвигатель без вероятности перегрузок.
Как видите, определить мощность электродвигателя без бирки можно и при чем довольно просто. Способов достаточное количество. Вам остается лишь выбрать наиболее удобный и правдивый на ваш взгляд и воспользоваться им.
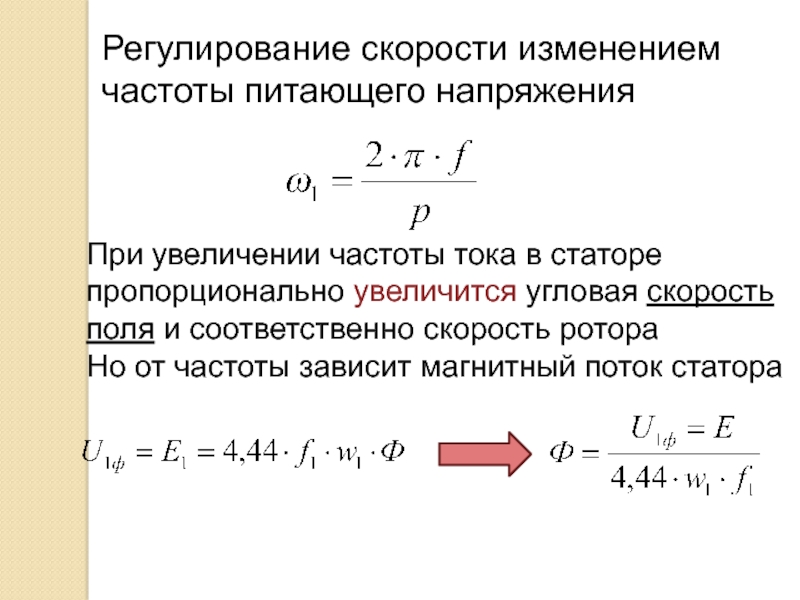
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного токауникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя.Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов. В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре. Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью приблизительно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений — и будет немного ниже — потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента. Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока.Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительную информацию о скольжении можно найти в нашем блоге «Синхронные и асинхронные двигатели: обнаруживая разницу».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется. Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако эта возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила может быть потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного токаХотя двигатели постоянного тока с постоянными магнитами также построены с полюсами, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока.Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов — все это влияет на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на скорости, рассчитанной на 12 В. Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же самый двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительный нагрев, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин, и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант редукторного двигателя.Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Количество полюсов — хорошее, плохое и уродливое
Количество полюсов (электродвигателя) стало моей любимой головной болью.
Многие новички совершенно ошибаются — привет мне еще в 2010 году или около того! Подробнее об этом чуть позже.
И даже больше по крайней мере несколько смущены по этому поводу. Хотя вы редко можете ошибиться, просто спросив тех, кто может знать больше (группа «Дизайн электродвигателей» на Facebook — отличное место для этого), вы также можете сначала прочитать этот пост.
Итак, давайте — Хорошее, Плохое и Уродливое увеличения числа полюсов.
Поляков. Они такие.Уродливые
Начнем с Уродливого.
Полюса НЕ ЯВЛЯЮТСЯ шестернями.
Это означает, что даже при наличии определенной обратной зависимости между числом полюсов и скоростью, нет соответствующего увеличения крутящего момента .
Другими словами, удвоение числа полюсов не (в общем) удвоить крутящий момент.Номер полюса не действует как передаточное отношение механической передачи. Это напрямую влияет на скорость, да (при фиксированной частоте питания), но влияние на крутящий момент гораздо больше тенистые и гибкие.
Способ, которым часто обучают и изучают моторы, может быть виноват в этой путанице. Основы базовой физики просматриваются либо учителем, либо учеником, или, что более вероятно, обоими.
Чтобы увековечить ошибку, во многих формулах крутящего момента из учебников номер полюса используется в качестве множителя.Однако они не показывают соответствующего подразделения, которое также спрятано где-то еще.
Например, предположим, что мы сохраняем фазовый ток и механическую скорость (и плотность потока в воздушном зазоре) одинаковыми и удваиваем количество полюсов. Поток на полюс уменьшается вдвое, но это немедленно компенсируется тем, что у нас их больше в серии. Поскольку каждый полюс стал меньше, мы можем разместить только половину количества витков в каждый из них. Это означало бы снижение обратной ЭДС и мощности (и, следовательно, крутящего момента), если бы не тот факт, что электрическая частота теперь тоже выше, что снова компенсирует это **.
** Теперь я понимаю, что этот пример, возможно, слишком упрощен и / или вводит в заблуждение. Например, индуктивность статора пропорциональна числу полюсов в квадрате . Это означает, что для двигателей, которые возбуждаются от статора, их способность создавать магнитный поток также ухудшается с увеличением числа полюсов. Это означает, что плотность потока в воздушном зазоре также может не остаться прежней, если не будут изменены и другие размеры.
Это очень хорошо видно в синхронном реактивном двигателе, где плотность потока в воздушном зазоре определяется только статором и статором.Удвойте количество полюсов, и плотность потока уменьшится вдвое, если вы не измените, например, плотность тока или геометрия другими способами.
Асинхронные двигатели — которые я, по совпадению, ненавижу по этой причине — более сложные. В IM, плотность потока в воздушном зазоре определяется комбинацией тока и статора и индуцированных токов ротора, противостоящих ему . (В эквивалентной схеме это видно как часть тока статора, выходящего через ветвь ротора и пропускающего ветвь намагничивания.Таким образом, увеличение числа полюсов IM означает, что большая часть тока статора тратится на возбуждение двигателя, а пропорционально меньше остается на связь ротора и создание крутящего момента.
Другими словами, мотор будет производить точно такой же крутящий момент независимо от количества полюсов, если все остальные размеры остались нетронутыми.
А теперь перейдем к собственно сравнению.
Хорошее
Длина конца обмотки
Чем больше полюсов, тем меньше длина конца обмотки * и, как следствие, снижаются потери в меди.
* Хотя почему это происходит, это довольно базовые знания, но вот версия для новичков: подумайте о двухполюсной машине. Концевая обмотка — часть обмотки за пределами сердечника двигателя между двумя последовательными сторонами катушки — должна пересекать примерно половину периферии двигателя. Для четырехполюсных машин расстояние сокращается до одной четвертой, для шестиполюсных машин — до одной шестой и так далее.
Кроме того, уменьшенная длина EW также снижает общую мощность двигателя. длина. Это, очевидно, само по себе может быть неплохо.Или, в качестве альтернативы, длина сердечника может быть увеличена для получения большего крутящего момента. из того же космического конверта.
Увеличенный крутящий момент
Увеличение числа полюсов может увеличить допустимый крутящий момент при определенных условиях.
Это происходит благодаря уменьшенному потоку на полюс, что позволяет использовать более тонкий статор (или роторного) ярма. Это, в свою очередь, может привести к увеличению радиуса воздушного зазора. и / или более глубокие пазы, что приводит к увеличению крутящего момента.
Однако именно здесь вступают в силу вышеупомянутые условия.
Первая в общем, плотность потока в воздушном зазоре должна оставаться неизменной или, по крайней мере, не сильно упасть. В индукционных и реактивных машинах это может не быть кейс. Но об этом позже.
Аналогично, полный ток в каждый слот (NI) также должен оставаться примерно таким же или увеличиваться. Опять же, это может быть не всегда из-за повышенных потерь в стали (еще раз потом).
Увеличенный максимальный крутящий момент
Это подводит нас к следующему пункту. Увеличение числа полюсов также позволяет использовать гораздо более высокие электрические нагрузки (по существу, NI на шаг паза).
Помните, что крутящий момент пропорционален NI, умноженному на (полезную *) плотность потока в воздушном зазоре. Это не зависит от количества полюсов.
* Часть потока в воздушном зазоре синфазна с вращающейся волной плотности тока. Подумайте здесь о синусах и косинусах.
Однако зависит от от того, сколько «дополнительного» (не создающего крутящего момента) поля воздушного зазора создается током. Действительно, доля поля воздушного зазора, создаваемого статором, по сути, представляет собой общий ток в одном полюсе, деленный на удвоенную длину воздушного зазора.
Итак, перенасыщение статор и сердечник ротора могут стать ограничивающим фактором перед тепловым или другие аспекты, особенно когда учитывается максимальный крутящий момент. В этом отношении может помочь увеличение числа полюсов (хотя это не помощь с другими проблемами, связанными с пиковыми нагрузками, такими как утечки потоки или силы намотки). Удвойте количество полюсов, и вы уменьшите вдвое способность обмотки статора создавать магнитный поток.
Это подводит нас к следующему пункту.
Плохой
Намагничивание
Предыдущий пункт применяется, когда перенасыщение статора является проблемой на пиковом уровне крутящего момента. Однако в асинхронных и реактивных двигателях весь поток в воздушном зазоре создается обмоткой статора.
И просто несколько минут назад мы узнали, что чем больше число полюсов, тем хуже статор работает при намагничивании. По этой причине вы редко видите асинхронные двигатели с числом полюсов более 8 и реактивные машины повезло достичь 6.
Потери переменного тока или скорость
Как обсуждалось ранее, увеличение числа полюсов снижает синхронную скорость двигателя. Это означает, что если мы хотим поддерживать скорость, необходимо увеличить частоту питания.
Это увеличит потери в стали и потери переменного тока в обмотке. Более того, даже конструкция инвертора может стать проблематичной, если мы перейдем к очень большим числам.
С другой стороны, если мы уменьшив скорость вращения ротора, мы вполне можем потерять часть мощности.Как мы усвоили, увеличение полюсов может помочь увеличить крутящий момент, но это все еще может быть недостаточно для компенсации * снижения скорости.
* мощность равна крутящему моменту, умноженному на скорость, помните
Межполюсная утечка
Сложный материал, означающий, что часть магнитного потока ротора уходит с одного полюса на другой, вообще не связывая обмотку статора.
Обычно он варьируется от «незначительно» до «неудобства», но также не позволяет предотвращать работу абсурдно большого числа полюсов.
Производство
Как правило, более высокое число полюсов затрудняет производство.
Это это скорее тенденция, чем жесткое правило: например, концентрированная обмотку для 10-полюсного двигателя сделать проще, чем распределенную обмотка для 2-х полюсной. Но даже тогда 40-полюсная сосредоточенная обмотка немного сложнее, чем пример с 10 полюсами несколько секунд назад.
Заключение
- Полюса не шестерни. Да, более высокое значение снижает синхронную скорость, но это не сопровождается автоматически соответствующим увеличением крутящего момента.
- Тем не менее, большее количество полюсов может увеличить допустимый крутящий момент. Это особенно актуально для машин PM.
- Двигатели, возбуждаемые от статора, обычно не работают со слишком большим количеством полюсов.
Ознакомьтесь с набором инструментов EMDtool — Electric Motor Design для Matlab .
Нужна помощь с разработкой электродвигателя или программным обеспечением для проектирования? Свяжитесь с нами — удовлетворение гарантировано!
% PDF-1.4 % 835 0 объект > эндобдж xref 835 135 0000000016 00000 н. 0000003070 00000 н. 0000003302 00000 н. 0000003456 00000 н. 0000003495 00000 н. 0000003552 00000 н. 0000003617 00000 н. 0000004489 00000 н. 0000004760 00000 н. 0000004827 00000 н. 0000004925 00000 н. 0000005031 00000 н. 0000005149 00000 п. 0000005209 00000 н. 0000005371 00000 п. 0000005544 00000 н. 0000005644 00000 н. 0000005799 00000 н. 0000005914 00000 н. 0000006013 00000 н. 0000006146 00000 н. 0000006256 00000 н. 0000006403 00000 п. 0000006525 00000 н. 0000006664 00000 н. 0000006830 00000 н. 0000006942 00000 н. 0000007128 00000 н. 0000007286 00000 н. 0000007404 00000 н. 0000007536 00000 н. 0000007699 00000 н. 0000007789 00000 н. 0000007920 00000 н. 0000008073 00000 н. 0000008213 00000 н. 0000008337 00000 н. 0000008494 00000 п. 0000008683 00000 н. 0000008863 00000 н. 0000009009 00000 н. 0000009172 00000 н. 0000009293 00000 н. 0000009474 00000 н. 0000009577 00000 н. 0000009758 00000 н. 0000009878 00000 н. 0000009997 00000 н. 0000010123 00000 п. 0000010307 00000 п. 0000010480 00000 п. 0000010577 00000 п. 0000010731 00000 п. 0000010843 00000 п. 0000011016 00000 п. 0000011121 00000 п. 0000011266 00000 п. 0000011384 00000 п. 0000011571 00000 п. 0000011728 00000 п. 0000011887 00000 п. 0000012079 00000 п. 0000012211 00000 п. 0000012384 00000 п. 0000012588 00000 п. 0000012712 00000 п. 0000012890 00000 н. 0000012990 00000 н. 0000013164 00000 п. 0000013287 00000 п. 0000013407 00000 п. 0000013558 00000 п. 0000013692 00000 п. 0000013848 00000 п. 0000013956 00000 п. 0000014053 00000 п. 0000014179 00000 п. 0000014291 00000 п. 0000014389 00000 п. 0000014509 00000 п. 0000014604 00000 п. 0000014698 00000 п. 0000014791 00000 п. 0000014884 00000 п. 0000014977 00000 п. 0000015071 00000 п. 0000015165 00000 п. 0000015259 00000 п. 0000015353 00000 п. 0000015447 00000 п. 0000015541 00000 п. 0000015635 00000 п. 0000015729 00000 п. 0000015823 00000 п. 0000015917 00000 п. 0000016011 00000 п. 0000016105 00000 п. 0000016199 00000 п. 0000016294 00000 п. 0000016388 00000 п. 0000016483 00000 п. 0000016577 00000 п. 0000016769 00000 п. 0000016923 00000 п. 0000017255 00000 п. 0000017466 00000 п. 0000018223 00000 п. 0000018245 00000 п. 0000019250 00000 п. 0000019272 00000 п. 0000020068 00000 н. 0000020829 00000 п. 0000021051 00000 п. 0000021073 00000 п. 0000021935 00000 п. 0000021958 00000 п. 0000023083 00000 п. 0000023106 00000 п. 0000024230 00000 п. 0000024253 00000 п. 0000025385 00000 п. 0000025910 00000 п. 0000026675 00000 п. 0000026896 00000 п. 0000027114 00000 п. 0000027137 00000 п. 0000028276 00000 п. 0000028298 00000 п. 0000029311 00000 п. 0000029451 00000 п. 0000033535 00000 п. 0000033775 00000 п. 0000033980 00000 п. 0000003658 00000 п. 0000004467 00000 н. трейлер ] >> startxref 0 %% EOF 836 0 объект > эндобдж 837 0 объект a_
Основные принципы асинхронных двигателей переменного тока
В этой статье мы рассмотрим работу наиболее распространенного типа двигателей вентиляторов — асинхронных двигателей переменного тока.
Асинхронные двигатели переменного тока
В вентиляторах Fläkt Woods чаще всего используются асинхронные двигатели переменного тока. Они могут работать непосредственно от источника электроэнергии, они надежны, не требуют особого обслуживания и относительно невысоки.
В трехфазном асинхронном двигателе переменного тока катушки изолированного провода находятся в пазах статора, расположенных в корпусе. Эти катушки сконфигурированы для обеспечения набора электромагнитных полюсов для каждой из трех электрических фаз (U, V и W) при включении.
На рисунке 1 показан двигатель, в котором катушки расположены таким образом, чтобы обеспечивать пару полюсов для каждой фазы (обозначены как U1 и U2, V1 и V2, W1 и W2). Поскольку у каждой фазы два полюса, это описывается как двухполюсная конфигурация; если бы для каждой фазы было две пары полюсов, это была бы 4-полюсная конфигурация и так далее.
Когда катушки в статоре подключены к источнику переменного тока, электрический ток будет течь и создавать магнитное поле — катушки намотаны так, что полюса в каждой паре имеют противоположную полярность.
Рисунок 1. Циклическое вращающееся магнитное поле в трехфазном асинхронном двигателе переменного тока
Цикличность формы волны переменного тока приводит к тому, что магнитное поле вращается вокруг центральной оси статора с двумя северными и двумя южными полюсами одновременно. Скорость этого вращения определяется количеством пар полюсов и частотой электроснабжения (50 Гц или 60 Гц — см. «Двигатели, основная часть первая»).
Если имеется одна пара полюсов, магнитное поле вращается один раз за электрический цикл; там, где есть две пары, магнитное поле вращается один раз за два цикла, а где есть три пары, оно вращается один раз за три цикла.
Основное уравнение для определения синхронной скорости выглядит следующим образом:
Синхронная скорость (об / мин) = 2 x Частота питания (Гц) x 60
Количество полюсов для каждой фазы
Итак, если бы двигатель на Рисунке 1 работал от источника питания 50 Гц, синхронная скорость была бы:
2 x 50 x 60 = 3000 об / мин
2
Таким образом, можно видеть, что чем больше число полюсов, тем медленнее будет синхронная скорость — таким образом, двигатель с 12 полюсами на фазу будет иметь синхронную скорость всего 500 об / мин.
Ротор
Помимо статора, наиболее важной частью асинхронного двигателя переменного тока является ротор. Он состоит из стержней ротора, обычно изготовленных из алюминия или меди, которые на концах соединены с кольцами из того же материала. Иногда это называют ротором «беличья клетка» (см. Рисунок 2).
Поскольку ротор расположен во вращающемся магнитном поле статора, образующиеся линии магнитного потока будут разрезать стержни ротора и индуцировать напряжение в роторе.Это, в свою очередь, приведет к протеканию электрического тока по стержням ротора (обозначенным на рисунке 2 красными стрелками), который создаст собственное магнитное поле вокруг стержней ротора. Это магнитное поле взаимодействует с магнитным полем статора, создавая силу на стержнях ротора, заставляя ротор вращаться вокруг своей оси.
Рисунок 2. Ротор типа «беличья клетка»
Далее: Двигатели Основная часть вторая: асинхронные двигатели переменного тока, двигатели переменного тока с постоянными магнитами и номинальные характеристики двигателей
Поскольку напряжение в стержнях ротора создается магнитным полем в статоре, прорезающим стержни ротора, если ротор вращается с синхронной скоростью, не будет относительного движения между стержнями ротора и магнитным полем статора, что приведет к на стержнях ротора не возникает напряжения.
Если к ротору приложена нагрузка, он начнет замедляться, и, следовательно, он начнет взаимодействовать с магнитным полем статора, и будет создаваться крутящий момент, как показано на рисунке 2. Это будет тот крутящий момент, который приводит в движение приложенную нагрузку. к ротору.
Синхронная скорость является функцией частоты электросети и конфигурации обмотки статора (количества полюсов). Разница между синхронной скоростью и скоростью ротора известна как скольжение; это выражается в процентах от синхронной скорости и может быть рассчитано по формуле:
Скольжение = синхронная скорость — скорость ротора
Синхронная скорость
Конструкция ротора
На рисунке 3 показана конструкция типичного ротора.Стержни ротора обычно содержатся в пазах в стальном сердечнике для усиления магнитного поля ротора. Стержни ротора обычно перекошены так, что они не совпадают с обмотками статора, что снижает электромагнитный шум и обеспечивает более плавную передачу крутящего момента.
Рисунок 3. Типовая конструкция ротора
Сердечник изготовлен из стальных пластин, уложенных вместе, в то время как стержни ротора и концевые кольца обычно создаются путем заливки расплавленного алюминия в матрицу или форму, которая окружает ламинированный пакет ротора.Этот расплавленный алюминий протекает через прорези в пакете ротора, образуя стержни ротора. Между стержнями ротора и стальным сердечником нет изоляции, так как индуцированное напряжение низкое.
Рисунок 4. Компоненты асинхронного двигателя переменного тока общего назначения
Однофазные асинхронные двигатели переменного тока
Статор, сконфигурированный для однофазного питания, не сможет инициировать вращение неподвижного ротора, потому что его магнитное поле просто переключается между полярностями.В результате требуется дополнительная обмотка для создания прогрессивно вращающегося магнитного поля. Эта вспомогательная обмотка подключена к однофазному источнику питания через конденсатор, так что ее форма напряжения может быть не в фазе с формой волны первичной обмотки.
Рисунок 5. Непрерывно вращающееся магнитное поле в однофазном асинхронном двигателе переменного тока, создаваемое вспомогательной обмоткой, подключенной к конденсатору
На рисунке 5 показано, как это создает непрерывно вращающееся магнитное поле, позволяющее индуцировать вращение.
Далее: Двигатели Основная часть третья: двигатели переменного тока с постоянными магнитами и номинальные характеристики двигателей
количество полюсов, противо-ЭДС и т. Д. В асинхронном двигателе
По моему скромному мнению, в идеальном сценарии при отсутствии нагрузки другие факторы могут быть проигнорированы и скорости ротора и статора могут быть одинаковыми.
Нет, абсолютно нет.
Как также подтвердил Макс: Отсутствие относительного движения между вращением поля статора и ротора означает НУЛЕВУЮ передачу энергии.
Единственный способ в реальном мире увидеть самую правую часть этого графика — это если ротор приводится в движение внешним приводом от отдельного двигателя с регулируемой скоростью. Затем ток упадет до минимума при синхронной скорости и снова начнет увеличиваться после этого.
Re. скольжение и более низкие скорости:
Ротор представляет собой беличью клетку, состоящую из «закороченных витков», соединенных медными стержнями.
Наведенные в них токи могут быть очень сильными, а результирующее магнитное поле — чрезвычайно сильным.
Закороченные витки «катушки» являются индукторами.
Если ротор вращается со скоростью, близкой к скорости поля статора, индуцированные магнитные полюса остаются рядом с полюсами статора.
Когда скольжение становится слишком большим, полюса выходят слишком далеко из линии, чтобы поддерживать максимальное индуцированное поле.
Полюса и циркулирующий ток затем должны повторно выравниваться в каждом полупериоде, поэтому индуктивность ротора означает, что максимальное поле никогда не достигается.
Помните, что электромагнит переменного тока используется для размагничивания или размагничивания объектов.
При слишком большом угловом изменении, поле ротора необходимо перестраивать каждые полупериод, а не увеличивать только частично под другим углом каждые полупериод.
Вот почему пусковой момент низкий, а пусковой ток высокий.
Из любопытства, угловые изменения …
Синхронная скорость 1500 об / мин, номинальная скорость 1440:
Это разница 60 об / мин, 1 оборот в секунду.
При трехфазной частоте 50 Гц имеется шесть пиков переменного тока (и, следовательно, сдвигов полюсов) за цикл; 300 в секунду.
Таким образом, максимальное вращательное скольжение или «дрейф» крутящего момента между ротором и статором составляет около 1,2 градуса за полупериод.
Проскальзывание полюсов в асинхронных двигателях
Асинхронные двигатели работают по принципу индукции тока в роторе, который должен вращаться со скоростью, меньшей, чем синхронная скорость, чтобы возникла индукция. Это называется скоростью скольжения, и ее не следует путать со скольжением шеста.Почему у асинхронных двигателей нет проскальзывания полюсов и почему у других двигателей есть проскальзывание полюсов.Я попытаюсь ответить на этот вопрос, но сначала давайте определим полюса и синхронную скорость применительно к работе электродвигателя.
Полюса в электродвигателе относятся к полюсам магнитной цепи и входят в комплект по два, как и у обычного магнита. Один на севере (N), а другой на юге (S). Если у двигателя два полюса, у него будет один N-полюс и один S-полюс. Если у двигателя четыре полюса, у него будет 2 полюса N, 2 полюса S и так далее.
Синхронная скорость в электродвигателе — это скорость, создаваемая бегущей волной магнитного поля, когда она вращается вокруг магнитной цепи статора.Синхронная скорость двигателя равна 120 * f / p, где f = системная частота в Гц, а p равно количеству полюсов в двигателе.
Все двигатели переменного тока состоят из двух основных частей: (1) обмотка статора и железный сердечник и (2) обмотка ротора и железный сердечник, который может свободно вращаться и соединен с валом двигателя. В трехфазном асинхронном двигателе, когда на статор подается питание от трехфазного источника напряжения, создается магнитное поле, которое вращается с синхронной скоростью. Когда этот магнитный поток пересекает обмотку ротора, он индуцирует ток (через закон индукции Фарадея) в обмотке ротора, который создает второй магнитный поток.Эти два магнитных потока вращаются с синхронной скоростью и соединяются вместе, как два магнита, и таким образом передают крутящий момент непосредственно на вал ротора.
Теперь вот ключевая мысль, которую вы должны понять, чтобы понять, как работает асинхронный двигатель и почему нет проскальзывания полюсов. Чтобы статор, подаваемый в поле, индуцировал ток в цепи ротора, ротор должен вращаться медленнее, чем синхронная скорость, чтобы соблюдался закон индукции Фарадея и магнитный поток проходил через обмотки ротора. Если ротор вращается с синхронной скоростью, магнитный поток статора не будет проходить через обмотки ротора, и в роторе не будет индуцироваться ток, и второе магнитное поле будет равно нулю.Следовательно, ротор должен вращаться со скоростью, меньшей, чем синхронная скорость, чтобы в цепи ротора возникла индукция. Это называется скоростью скольжения, и ее не следует путать со скольжением шеста.
Другой тип (переменного тока) двигателя — это синхронный двигатель, в котором на роторе имеется обмотка возбуждения с независимым возбуждением. Для работы синхронного двигателя вал ротора вращается с синхронной скоростью, и магнитное поле, создаваемое обмоткой возбуждения, соединяется с полем статора, и крутящий момент передается на вал.В случае, когда крутящий момент на валу превышает силу магнитного поля, действующую на ротор, может произойти проскальзывание полюсов, что приводит к очень высоким значениям тока статора и крутящего момента на валу. Это состояние может привести к серьезному повреждению двигателя и срабатыванию автоматических выключателей.
Изучите это. Понимать это. Задайте свои вопросы и ответьте на них, купив хорошую книгу по двигателям и изучив принципы преобразования энергии.
Кол-во полюсов-Насос Тезаурус-ЗБ насос
Скорость трехфазного асинхронного двигателя градуируется и определяется «числом полюсов» двигателя.
«Число полюсов» трехфазного асинхронного двигателя — это количество магнитных полюсов, определяющих подполе. Обмотки статора соединены по-разному, чтобы сформировать разное число полюсов магнитного поля статора. Количество полюсов для выбора двигателя определяется скоростью, необходимой для нагрузки. Количество полюсов двигателя напрямую влияет на скорость двигателя. Скорость двигателя = 60x частота двигателя / пары полюсов двигателя. Ток двигателя зависит только от напряжения и мощности двигателя.
Классификация
1. Число полюсов отражает синхронную скорость двигателя. 2-полюсная синхронная скорость составляет 3000 об / мин, 4-полюсная синхронная скорость составляет 1500 об / мин, 6-полюсная синхронная скорость составляет 1000 об / мин, а 8-полюсная синхронная скорость составляет 750 об / мин.
Одна или одна обмотка обмотки может образовывать петлю, то есть логарифм магнитных полюсов, которые появляются попарно, а полюса являются значениями магнитных полюсов. Когда эти обмотки пропускают ток, создается магнитное поле, и соответственно будут магнитные полюса.
Каждая группа трехфазных двигателей переменного тока генерирует полюса N и S, и количество полюсов на фазу каждого двигателя равно количеству полюсов. Поскольку магнитные полюса появляются парами, двигатель имеет 2, 4, 6, 8 … полюсов.
2. Если частота трехфазного переменного тока составляет 50 Гц, синхронная скорость комбинированного магнитного поля составляет 50 об / с, то есть 3000 об / мин. Если вращающееся магнитное поле двигателя больше, чем пара магнитных полюсов, дальнейший анализ может также получить синхронную скорость вращения n и пару магнитных полюсов магнитного поля.Соотношение числа p: n = 60f / pf — частота, единица Гц.n — об / мин.
Существует строгая зависимость между ns и частотой подключенного переменного тока (f) и количеством пар магнитных полюсов (P) двигателя ns = f / P.
В Китае частота сети составляет 50 Гц, поэтому синхронная скорость двухполюсного двигателя составляет 3000 об / мин, синхронная скорость четырехполюсного двигателя — 1500 об / мин и так далее. Скорость ротора асинхронной машины всегда ниже или выше скорости ее вращающегося магнитного поля, отсюда и название асинхронной.Разница между скоростью ротора асинхронного двигателя и скоростью вращения магнитного поля (называемая скольжением) обычно находится в пределах 10%. Видно, что скорость двигателя переменного тока (синхронного или асинхронного) ограничена частотой сети. Следовательно, регулирование скорости двигателя переменного тока затруднено. Лучше всего изменить частоту блока питания. Раньше было сложнее изменить частоту сети.
3. Число полюсов трехфазного асинхронного двигателя переменного тока — это общее количество групп катушек, разделенное на три.
4. Скорость синхронного двигателя = 60 * пар частота / полюс.
Скорость асинхронного двигателя = (60 * частота / пара полюсов) × (1 с) с: скольжение, физическая величина, указывающая степень, в которой скорость n ротора отличается от скорости n0 магнитного поля.
Кроме того, для двигателей одинаковой мощности, чем выше скорость вращения, тем меньше выходной крутящий момент.
5. Число полюсов синхронного двигателя
Все синхронные двигатели большой мощности являются полюсными, то есть ротор представляет собой магнитный полюс, который создается обмоткой возбуждения постоянным током или постоянным магнитом на ротор, а пара полюсов синхронной машины — логарифм полюса ротора.Восьмиполюсный двигатель таков, что у ротора 8 магнитных полюсов, 2p = 8, то есть двигатель имеет 4 пары магнитных полюсов. Как правило, паротурбинные генераторы представляют собой электродвигатели со скрытыми полюсами. Количество пар полюсов очень мало, обычно 1, 2 пары и n = 60f / p, поэтому его скорость очень высока, до 3000 об / мин (частота сети), а количество полюсов гидрогенератора вполне большие, конструкция ротора заметна, а процесс сложен. Из-за множества полюсов его скорость очень мала и может составлять всего несколько оборотов в секунду.