Как подключить двигатель от стиральной машины автомат к 220
Народные умельцы стараются использовать для реализации своих идей любые подручные средства, материалы и возможности. Сломанная техника может обрести новую жизнь, трансформироваться в нечто другое. Стиральная машина – это кладезь различных предметов, которые можно использовать в дальнейшем, если техника вышла из строя и не подлежит ремонту. Например, такой деталью может быть мотор. Его можно использовать для разных целей, чтобы заставлять двигаться те или иные механизмы.
Подключаем двигатель
Самое простое применение – использовать в подсобном помещении, на балконе или в гараже в качестве движущей вращающей силы шлифовального диска, который можно использовать для заточки ножей, топоров и прочего инструмента. Поэтому стоит рассмотреть вопрос, как подключить двигатель от стиральной машины автомат к электрической сети, чтобы обеспечить должные характеристики и безопасность процесса. При этом, конечно же, мотор не должен сгореть при подключении.
Схема
Итак, разберемся в вопросе, как правильно подключить двигатель от стиральной машины к 220 В сети. И, прежде всего, необходимо ознакомиться с электросхемой.
Процедура подключения займет немного времени. С первого взгляда можно подумать, что от двигателя идет много проводов, однако на деле может понадобиться лишь несколько. Ориентироваться нужно на используемую схему. Следует использовать только провода, идущие от статора и ротора.
Обычно у двигателя бывает 3 вывода, 4 вывода или 6 выводов. Какие выбрать? Необходимо взглянуть на колодку, два левых провода не используются. Чаще они имеют белый цвет. Они позволяют регулировать обороты мотора.
От статора идет обычно коричневый и красный провод. Следующие питают щетки ротора. Как правило, они имеют зеленый и серый цвет. Конечно, указанные цвета являются ориентировочными, однако у каждого производителя свои предпочтения, поэтому этот параметр в вашем случае может отличаться. Чтобы определить нужные провода, достаточно воспользоваться мультиметром.
Прибор устанавливается на измерение сопротивления. Одним щупом нужно коснуться первого провода, вторым же щупом следует подыскать пару. Так необходимо действовать с каждым проводом.
Если вы задумались, как подключить эл. двигатель от стиральной машины к электросети, не стоит использовать пусковой конденсатор.
Подключение
После обнаружения проводов остается их соединить. Следует наладить контакт одного конца статорной обмотки с роторной щеткой. Стоит использовать перемычку с изоляцией. Оставшиеся провода необходимо подключить к электросети 220 В.
Внимание! После подключения указанных проводов к напряжению мотор сразу начнет вращаться. К этому нужно быть готовыми, чтобы предотвратить травмы и прочие неприятности. Рекомендуется зафиксировать мотор на поверхности. Это станет гарантией безопасности тестирования.
Нужно изменить направление вращения двигателя? Тогда следует переставить провода щеток. Как правило, все работает, однако при неисправности мотора не стоит рассчитывать на его восстановление. Поэтому его придется проверить.
Поэтому его придется проверить.
В старых моделях
Отдельно нужно сказать о том, как подключить двигатель от старой стиральной машины. Ведь в этом случае процедура будет несколько сложнее.
Для этого нужно воспользоваться все тем же мультиметром. Следует прозвонить обмотки мотора, чтобы найти пары.
Может быть такая ситуация, окажется, что есть две обмотки, а сопротивление разное. Нужно их сравнить. У пусковой обмотки сопротивление обычно выше, чем у рабочей.
Для старта такого мотора потребуется пусковое реле или кнопка (к примеру, от дверного звонка – без фиксирующего контакта).
Подача напряжения осуществляется на обмотку напряжения, а на пусковую необходимо также подать напряжение, но на малый период, поэтому для отключения требуется кнопка.
Итак, получаем такую схему:
- Кнопка – SB. Обеспечивает подачу напряжения на пусковую обмотку, после старта двигателя отключает.
- Обмотка возбуждения – ОВ. Она заботится о вращении мотора.

- Пусковая обмотка – ПО. Исключительно для старта мотора.

В итоге ОВ подсоединяется к сети 220 В, а ПО – через кнопку. Для тестирования следует нажать на кнопку, после старта мотора ее необходимо выключить. Для обеспечения вращения в другом направлении используется замена контактов обмотки ПО.
Сложности
Мы описали процедуру, как подключить двигатель от стиральной машины Индезит и многих других брендов. Однако может случиться так, что мотор все-таки не заведется. И тогда придется разбираться в причинах и путях их разрешения.
Для начала нужно проверить нагрев двигателя после его минутной работы. Такой короткий период позволяет не распространиться теплу, а значит, можно точнее определить, в каком именно месте греется мотор: статор, подшипники и т. д.
Дальше нужно проверять двигатель через каждые 5 минут. Такую процедуру следует проделать несколько раз. Причины перегрева двигателя:
- износ подшипников;
- увеличенная емкость конденсатора.

А дополнительно о том, как подключить мотор от стиральной машины автомат Индезит к 220 В напряжения, можно посмотреть на видео.
Как подключить двигатель от стиральной машины: схема подключения
Хорошие моторы стоят в стиральных машинах, даже когда последняя выходит из строя и выбрасывается — двигатели оставляют и позже используют в хозяйстве (например для мини-станка). Здесь будет рассмотрен типичный двигатель от стиральной машины автомат (нового и старого типа) и схема его отдельного подключения к 220 В. Но вначале позвольте выложить немного скучной теории, которую можно и пропустить перейдя ко второй, практической, части статьи.
Синхронные двигатели
Еще со школьной скамьи известно, что, приближая близко магниты, они притягиваются или же отталкиваются. Первый случай возникает у разноименных магнитных полюсов, второй – одноименных. Речь идет о постоянных магнитах и присутствующем постоянно создаваемом ими магнитном поле.
Кроме описанных, есть переменные магниты. Все помнят пример из учебника по физике: на рисунке изображен магнит в форме подковы. Между его полюсами помещена рамка, выполненная в форме подковы и имеющая полукольца. На горизонтально расположенную рамку, подавали ток.
Все помнят пример из учебника по физике: на рисунке изображен магнит в форме подковы. Между его полюсами помещена рамка, выполненная в форме подковы и имеющая полукольца. На горизонтально расположенную рамку, подавали ток.
Поскольку магнит отталкивает одноименные и притягивает разноименные полюса, вокруг этой рамки возникает электромагнитное поле, которое разворачивает ее вертикально. В результате на нее поступает противоположный первому случаю по знаку ток. Изменяющаяся полярность вращает рамку и вновь возвращает в горизонтальную плоскость.
На этом принципе и основана работа синхронного электродвигателя.
В реальной схеме ток подается на обмотки ротора, являющегося рамкой. Источником, создающим электромагнитное поле, являются обмотки. Статор выполняет функции магнита.
Он также изготовлен из обмоток или из комплекта постоянных магнитов.
Частота вращения ротора электродвигателя описываемого типа такая же, как у тока, который поддат на клеммы обмотки, т. е. они работают синхронно, что и дало название электродвигателю.
е. они работают синхронно, что и дало название электродвигателю.
Подключение мотора от СМА
Этот двигатель содержит две независимые обмотки:
для синхронной скорости 3000 об / мин — двухфазная обмотка.
для синхронной скорости 500 об / мин — симметричная трехфазная обмотка. Трехфазная система подключения позволяет изменять скорость вращения путем переключения питания обмотки.
Двигатель старого типа имеет обычно 5 проводов черного, синего, белого, красного и зеленого цвета. Была проведена серия измерений для определения обмоток и сопротивления между ними вышло таким:
- Сине-черным 85 Ом
- Сине-зеленый 85 Ом
- Черно-зеленый 80 Ом
- Бело-синий 15 Ом
- Белый-красный 30 Ом
Подключение старого электродвигателя требует поиска обмотки запуска с помощью мультиметра.
- ПО — начальная обмотка. Он предназначен только для запуска двигателя и запускается в самом начале, пока двигатель не начнет вращаться.
- OB — обмотка возбуждения. Это рабочая обмотка, которая работает постоянно и постоянно поворачивает двигатель.
- SB — кнопка, с которой напряжение подается на пусковую катушку и выключается при запуске двигателя.

Как работает асинхронный двигатель?
Чтобы разобраться с принципом его работы, вспоминаем ту же картинку, что в примере предыдущем: рамка (но без полуколец) размещена между магнитными полюсами. Магнит выполнен в форме подковы, концы которой соединены.
Начинаем его медленно вращать вокруг рамки, следя за происходящим: до какого-то момента движения рамки не наблюдается. Затем, при определенном угле разворота магнита, она начинает вращаться за ним со скоростью меньшей, чем скорость последнего. Работают они асинхронно, поэтому моторы называются асинхронными.
В реальном электродвигателе магнит — это размещенная в пазах статора, на которые подается ток, обмотка. Ротор же является рамкой. В его пазах находятся соединенные накоротко пластины.
 Его так и называют – короткозамкнутый.
Его так и называют – короткозамкнутый.Устройство циркулярной пилы
Являясь действительно полезным инструментом, циркулярка имеет достаточно простую конструкцию. Основные ее узлы:
- станина – рама, на которой смонтированы основные агрегаты;
- столешница с прорезью под диск;
- двигатель с системой передачи вращения;
- режущий инструмент, диск с зубьями.
Опционально устройство может быть дополнено толкателем, обеспечивающим поступательное продвижение заготовки к диску, и различными подъемными механизмами, регулирующими глубину распила.
Принцип действия циркулярной пилы (циркулярки) состоит в том, что вращение вала электродвигателя передается на режущий инструмент, диск с остро заточенными зубьями. Центр диска располагается ниже уровня столешницы, из нее выведен лишь его сегмент. К вращающемуся диску подводится заготовка, зубья вгрызаются в древесину, создавая ровный распил.
Плюсы асинхронных двигателей для стиральных машин
Электромотор, вращающий барабан, это сердце машинки для стирки.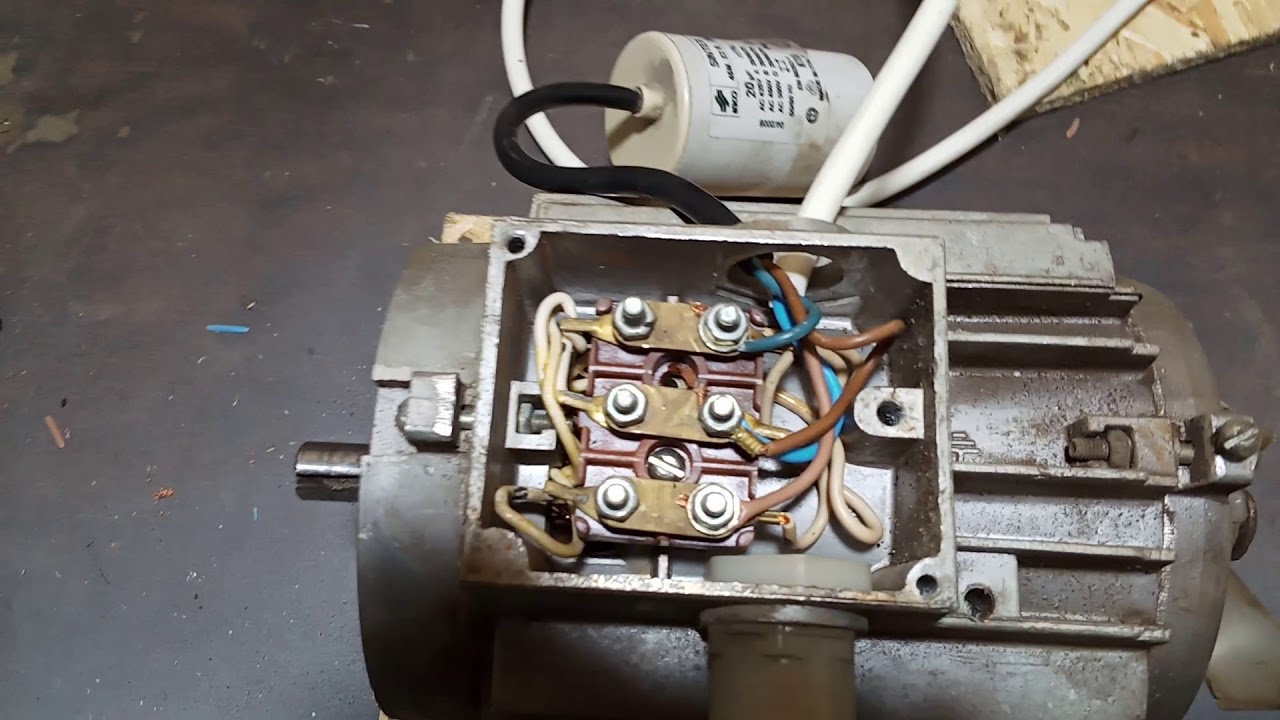 Приводом в самых первых вариантах машинок были ремни, вращающие емкость с бельем.
Приводом в самых первых вариантах машинок были ремни, вращающие емкость с бельем.
Но, сегодня асинхронный агрегат, преобразующий в механическую энергию электроэнергию, заметно усовершенствован.
Чаще в схемах стиральных машинках присутствуют асинхронные электродвигатели, состоящие из статора, который не движется и служит одновременно магнитопроводом и несущей конструкцией, и движущегося ротора, вращающего барабан. Работает асинхронный мотор благодаря взаимодействию магнитных переменных полей этих узлов.
Рекомендуем:
- Схема подключения солнечных батарей загородного дома
- Необычные скейтборды, которые едут сами
- Собрать солнечную батарею своими руками
Асинхронные двигатели подразделяются на двухфазные, редко встречающиеся, и трехфазные.
К плюсам асинхронных агрегатов относят:
- незамысловатую конструкцию;
- простое обслуживание, предусматривающее замену изношенных подшипников и
- периодическое смазывание электродвигателя;
- бесшумную работу;
- относительную дешевизну.
- Недостатки, конечно, тоже есть:
- низкий КПД;
- большие размеры;
- небольшая мощность.

Такие моторы, как правило, устанавливают на модели недорогие.
Виды
В современных стиралках применяются три типа двигателей:
- коллекторные;
- асинхронные;
- прямого привода с инверторным управлением.
Коллекторные
Это наиболее распространённый мотор. По статистике, стоит на 85% стиральных машин.
Его преимущества:
- недорогой;
- тяговитый;
- скоростной;
- простой в управлении.
Вы стираете обувь в машине?
О-да!Нет
Мнение эксперта
Работаю в сфере ремонта бытовой техники. Большой опыт в восстановлении стиральных и посудомоечных машин.
Задать вопрос
Главным минусом этих двигателей является щёточный узел. При средней эксплуатации, его хватает на 8-10 лет. Затем нужна замена. Кроме этого щётки стачиваются и в машине на разных деталях оседает угольная пыль.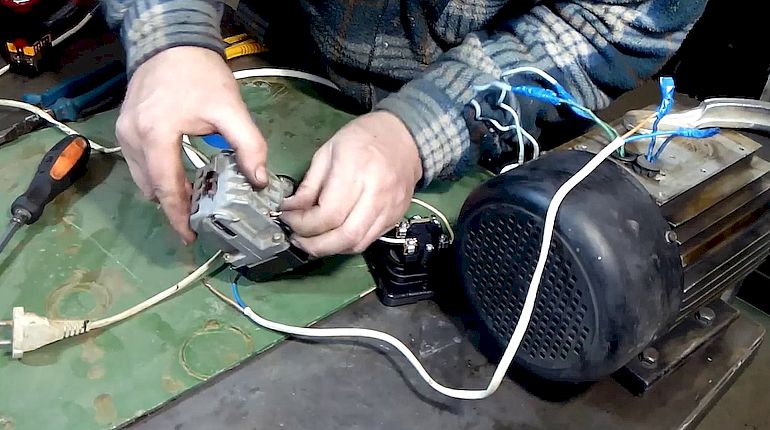
Довольно часто, это приводит к проблемам в работе СМА, которые будет трудно определить. Щёточная пыль пропускает электричество, и из-за неё возникает утечка тока, которая приводит к сбоям. В последнее время наметилась тенденция, по отходу от таких моторов. Но для недорогих моделей, коллекторные двигатели незаменимы.
Асинхронные
Менее распространённый вариант. К достоинствам относятся — отсутствие щёток, и связанных с ними проблем.
Недостатки, следующие:
- низкоскоростные;
- недостаточно тяговитые;
- сложное управление двигателем.
Ввиду этого, получили не такое широкое распространение. Существуют одно— и трёхфазные асинхронные двигатели. Для запуска первого применяется пусковой конденсатор определённой ёмкости. Для трёхфазных используется сложная система управления с помощью инвертора.
Прямой привод
По сути — это инновационный продукт, который был разработан фирмой LG, и очень широко используемый на моделях стиральных машин, которые она выпускает. Главным преимуществом этого двигателя, является отсутствие приводного ремня. Так как, мотор насажен непосредственно на вал барабан и вращает его.
Главным преимуществом этого двигателя, является отсутствие приводного ремня. Так как, мотор насажен непосредственно на вал барабан и вращает его.
Благодаря этому нет потерь на трение, а так же дополнительной вибрации. Фирма утверждает, что машины с двигателями прямого привода менее шумны, и соответственно эксплуатация более комфортная.
Минус этого решения — сложное и дорогое управление. Оно осуществляется благодаря преобразованию переменного тока в постоянный. Из-за этого, такие двигатели называют инверторными. Электронные модуля — очень сложные и не всегда подлежат ремонту.
Схема подключения
Особенности, которые нужно учитывать, чтобы подключить электродвигатель от стиральной машины к сети 220 В:
- схема подключения демонстрирует, что мотор работает без пусковой обмотки;
- в схеме подключения нет также пускового конденсатора – для запуска он не требуется. Но необходимо провода к сети подсоединить строго в соответствии со схемой.

Поможет разобраться в этом видео:
Видео: Как подключить двигатель от стиральной машины к 220
Главное – соединить строго в соответствии со схемой подключения провода.
Не понадобятся для подключения провода (2 белых) – измеритель оборотов двигателя. Другие — красный провод и коричневый (3 и 4), идущие на статор, а также серый и зеленый (1 и 2), идущие на щетки, как видно со схемы подключения и требуется правильно подсоединить.
В схеме подключения двигателя обмотки статора соединены последовательно.
К красному проводу обмотки, как указано в схеме подключения, подсоединяют 220В. На конец следующей обмотки подключают одну щетку.
Другую, как требует схема подключения, подсоединяют к 220 В. Двигатель к работе готов, но крутится он в одном направлении. Чтобы включить его в обратную сторону, необходимо поменять местами щетки.
Теория работы электромотора на 220 В
Асинхронные двигатели для однофазной сети, представляют собой в основном двигатели с двухфазными обмотками и с вспомогательной фазой, берущейся от конденсатора. Такие моторы используются в бытовой технике. Подобный двигатель используется, в частности, в приводе стиральной машины. В дополнение к моторам с двухфазной обмоткой моторы с трехфазной обмоткой иногда используются в некоторых других бытовых приборах.
Двигатель во время прямого запуска может получить из сети ток, значительно превышающий его номинальное значение. Этот ток называется пусковым током двигателя, и его значение изменяется в районе Ir = 5-7In.
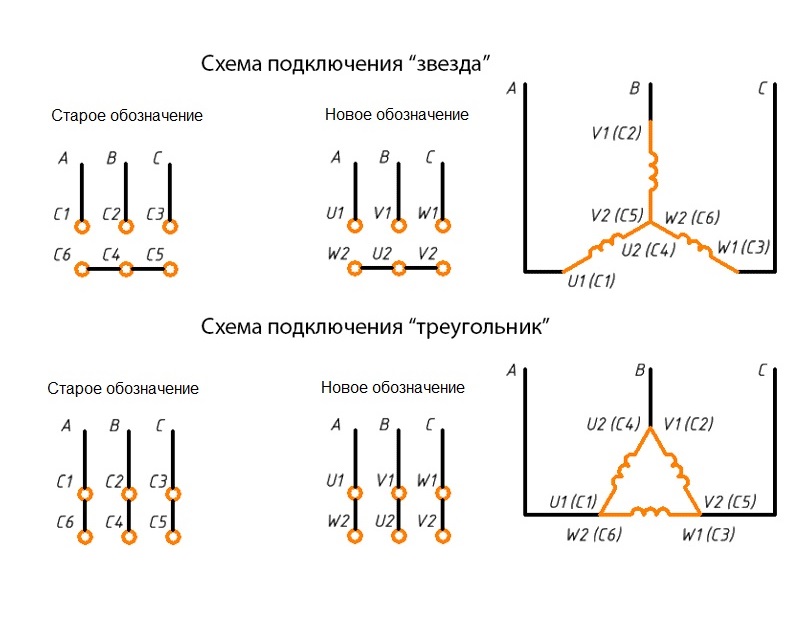
Одним из способов уменьшения пускового тока является использование переключателя звезда-треугольник. Двигатель, предназначенный для работы статора в треугольном включении при заданном сетевом напряжении, включается в систему звезда в момент запуска:
Ввиду пониженного напряжения поступающего на фазу обмотки статора и изменения соединений от треугольника к звезде ток, взятый из сети, будет уменьшаться в три раза по сравнению с пусковым током в треугольной схеме. Однако при подключении в звезду двигатель имеет в три раза меньше пускового момента, что делает невозможным использование этого метода во время тяжелого пуска (с большой нагрузкой).
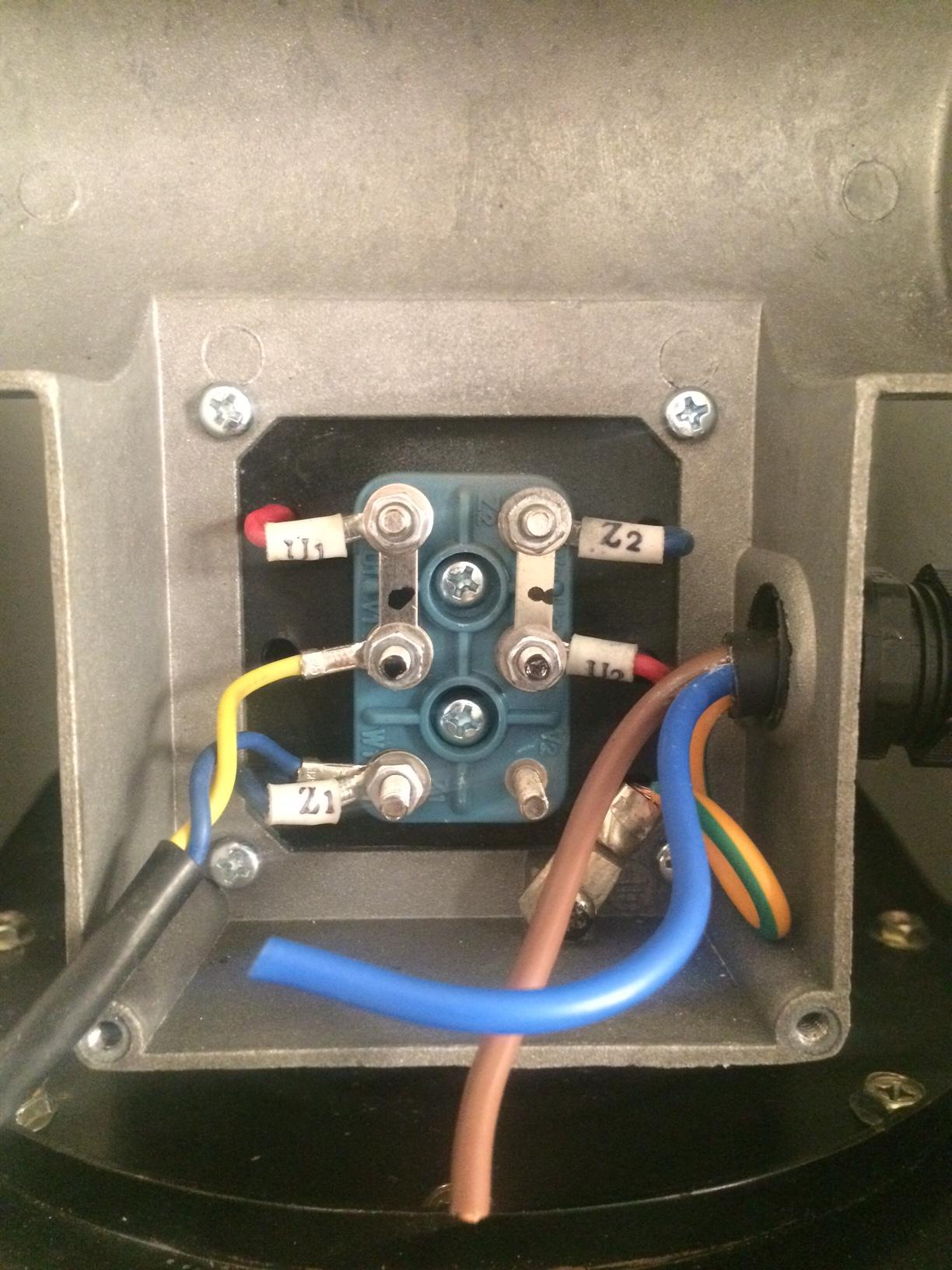
Схема подключения двигателя в старой стиральной машине
Здесь все серьезнее. Необходимо найти 2 пары выводов, которые соответствуют друг другу, используя мультиметр (тостер). Для этого фиксируют прибор на любом из выводов и отыскивают парный, пользуясь щупом. Два оставшихся вывода будут второй парой автоматически.
Теперь определяют расположение обмотки рабочей и пусковой, замеряя сопротивление. Пусковую (ПО), создающую пусковой момент, находят по более высокому сопротивлению. Обмотка возмущения (ОВ) создает магнитное поле.
Простая циркулярка из болгарки или дисковой пилы
Углошлифовальная машинка (болгарка) – один из самых востребованных инструментов домашнего мастера, с ее помощью несложно резать металл, зачищать сварные швы. Кроме того, используя вместо штатного абразивного диска диск для дерева, болгарку можно превратить в ручную дисковую пилу (ее называют также паркеткой), а изготовив станину со столиком – в стационарную циркулярку.
Необходимые принадлежности
Для работы понадобится:
- многослойная фанера толщиной 10 мм и более;
- выключатель и провод;
- болты со шляпкой под потай;
- шурупы;
- деревянный брусок 40х40 мм.

Также надо подготовить дрель или шуруповерт, молоток, отвертку, плоскогубцы, линейку и карандаш. С помощью этих инструментов предстоит сделать своими руками циркулярку.
Конечно, надо не забыть саму болгарку или ручную дисковую пилу. На первом этапе она поможет раскроить материал, а после займет место в качестве рабочего органа циркулярки.
Последовательность действий
Первым делом изготавливается корпус циркулярки. Для этого отлично подойдет толстая фанера, можно использовать любые прессованные древесные плиты. Потребуется вырезать четыре прямоугольных листа, размер 40 х 80 см. Из них собирается короб с квадратом 80 х 80 см в основании. В углах для простоты сборки и надежности конструкции устанавливают четыре бруска.
Сверху полученный короб закрывается столешницей. Ее можно изготовить из той же фанеры, но лучше использовать какой-либо листовой материал с ламинированным покрытием. Это гарантирует долговечность станку, обеспечит удобство эксплуатации самодельной циркулярки.
В столешнице делают пропил для выхода диска, по бокам от него сверлят отверстия для крепления инструмента.
Болгарку необходимо надежно зафиксировать под столешницей. Конструкция фиксатора может быть самой разнообразной, все зависит от конфигурации самой машинки. Основное требование к креплению – оно должно надежно удерживать болгарку, не позволяя ей смещаться.
Простейшее крепление может выглядеть так: два металлических угольника, между ними стальным хомутом фиксируется болгарка.
Для дополнительной прочности рекомендуется задействовать резьбу боковой рукояти, в нее ввинчивается болт с подходящей резьбой.
В верхних полках угольников, удерживающих болгарку, сверлят по два отверстия. Конструкцию с помощью болтов с потайными головками крепят снизу к столешнице. Останется только заблокировать кнопку включения, подключить болгарку через внешний выключатель.
Таким же образом можно изготовить своими руками циркулярку из дисковой пилы. В данном случае работа заметно упрощается благодаря тому, что не нужно придумывать крепление.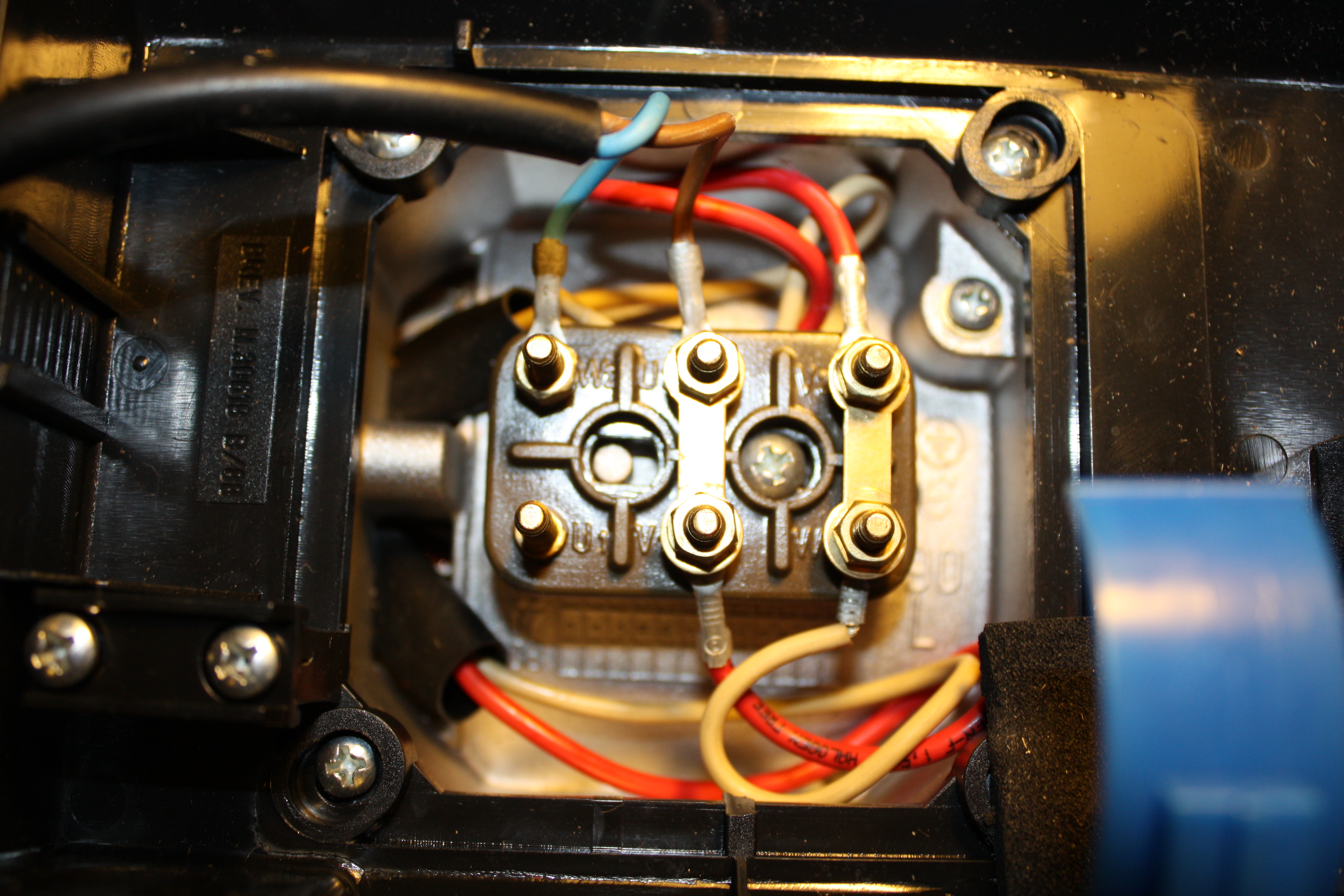 Достаточно сделать вырез под диск, просверлить отверстия по отверстиям плиты ручной дисковой пилы.
Достаточно сделать вырез под диск, просверлить отверстия по отверстиям плиты ручной дисковой пилы.
Частые поломки: с чем можно столкнуться
Как подключить электрический двигатель от старой стиральной машинки, теперь известно. Но бывают ситуации, когда мотор не запускается. Каковы же причины и пути решения такой неприятности?
Попробуйте проверить в каком состоянии находится нагрев мотора после его трехминутной работы. За такое короткое время все детали не могут нагреться одинаково, поэтому у вас есть возможность выявить место неисправности, которое будет слишком нагрето. Это может быть узел подшипника, статор и прочее.
Разные неисправности движков
Главными причинами, по которым та или иная деталь слишком нагрелась, могут быть следующие:
- засорившийся или вышедший из строя подшипник;
- чрезмерно расширенная емкость конденсатора.
Стационарный станок
Тем, кто планирует серьезно заниматься деревообработкой, стоит задуматься об изготовлении полноценной стационарной циркулярной пилы. Это должен быть отдельный агрегат, установленный на верстак, оборудованный мощным двигателем, с возможностью быстрой замены диска. На изготовление своими руками такой циркулярки придется затратить время, но она точно себя окупит.
Это должен быть отдельный агрегат, установленный на верстак, оборудованный мощным двигателем, с возможностью быстрой замены диска. На изготовление своими руками такой циркулярки придется затратить время, но она точно себя окупит.
Несмотря на видимую простоту данного устройства, до начала работы стоит создать чертеж станка. Это позволит наглядно увидеть будущий агрегат, выбрать оптимальную его конфигурацию.
Полезные советы
Делая циркулярку своими руками, рекомендуется предусмотреть возможности для ее ремонта и обслуживания. Любая подвижная часть должна иметь удобные подступы для смазывания. Начиная все монтажные работы, следует заготовить подробные чертежи и схемы, выполнить соответствующие расчеты. Самодельная циркулярка отличается габаритами и способна легко помещаться в подсобном помещении.
Регулирование оборотов
Для исправной работы нужен регулятор оборотов
Двигатель стиральной машинки характеризуется довольно высокой скоростью вращения, поэтому желательно сделать специальный регулятор, чтобы мотор молот работать в разных скоростных режимах без перегрева. Для этой цели можно использовать обычное реле интенсивности света, но немного доработанное.
Для этой цели можно использовать обычное реле интенсивности света, но немного доработанное.
Нужно извлечь из «стиралки» симистор вместе с радиатором – так называемый полупроводниковый прибор (в управлении электронами он функционирует в качестве управляемого выключателя). Затем необходимо впаять этот прибор в микросхему реле, заменив детали с малой мощностью. Если вы не знаете все нюансы данной процедуры, лучше попросить помощи специалиста (электронщика или компьютерщика).
Бывают случаи, когда двигатель выполняет новую работу без помощи регулятора оборотов.
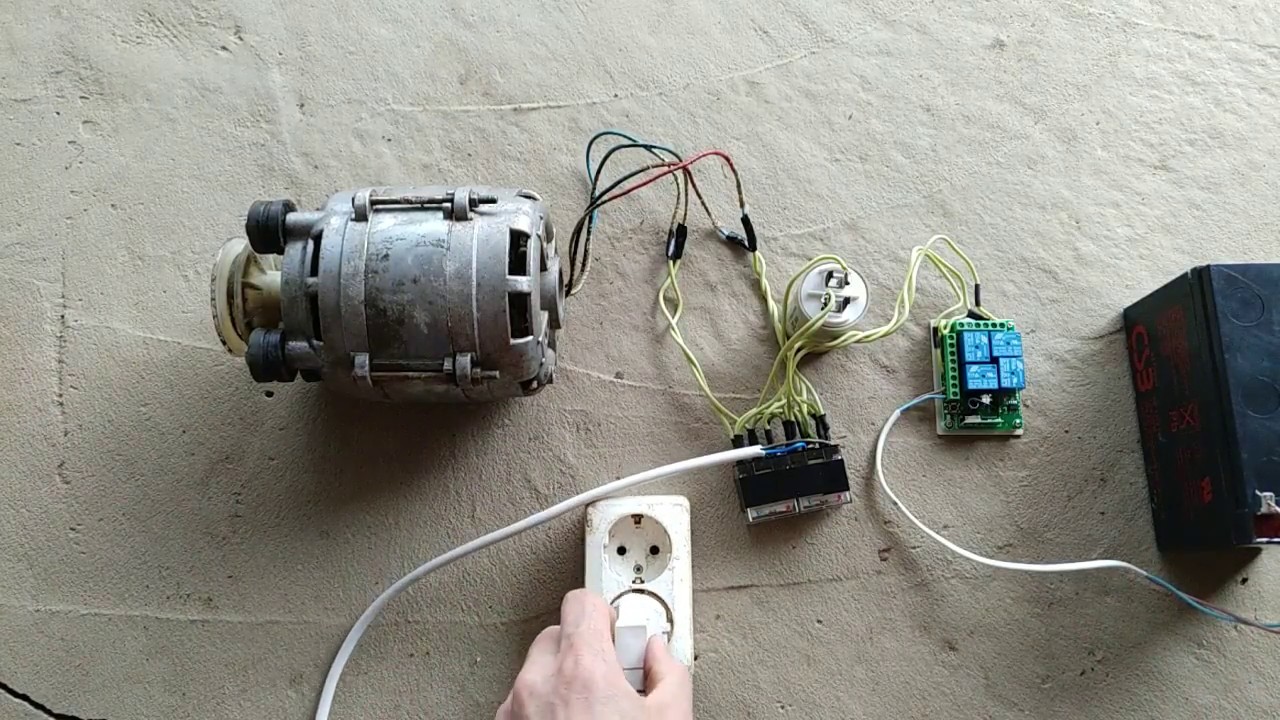
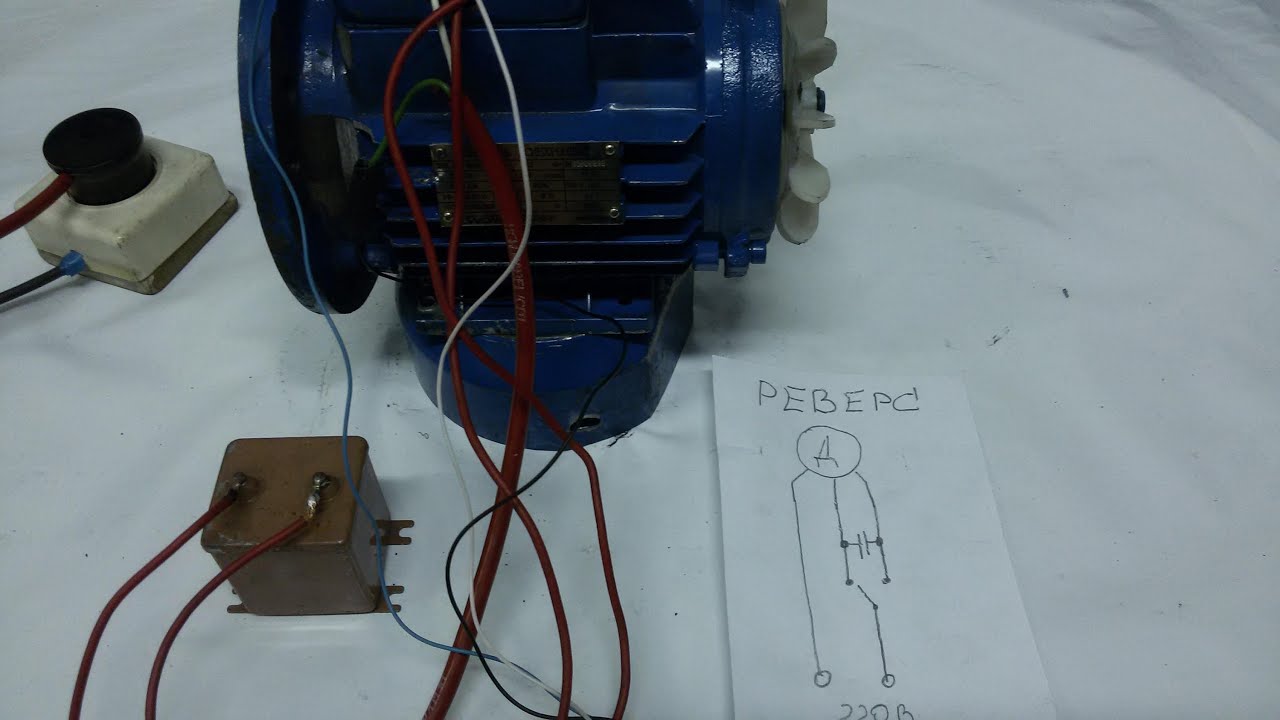
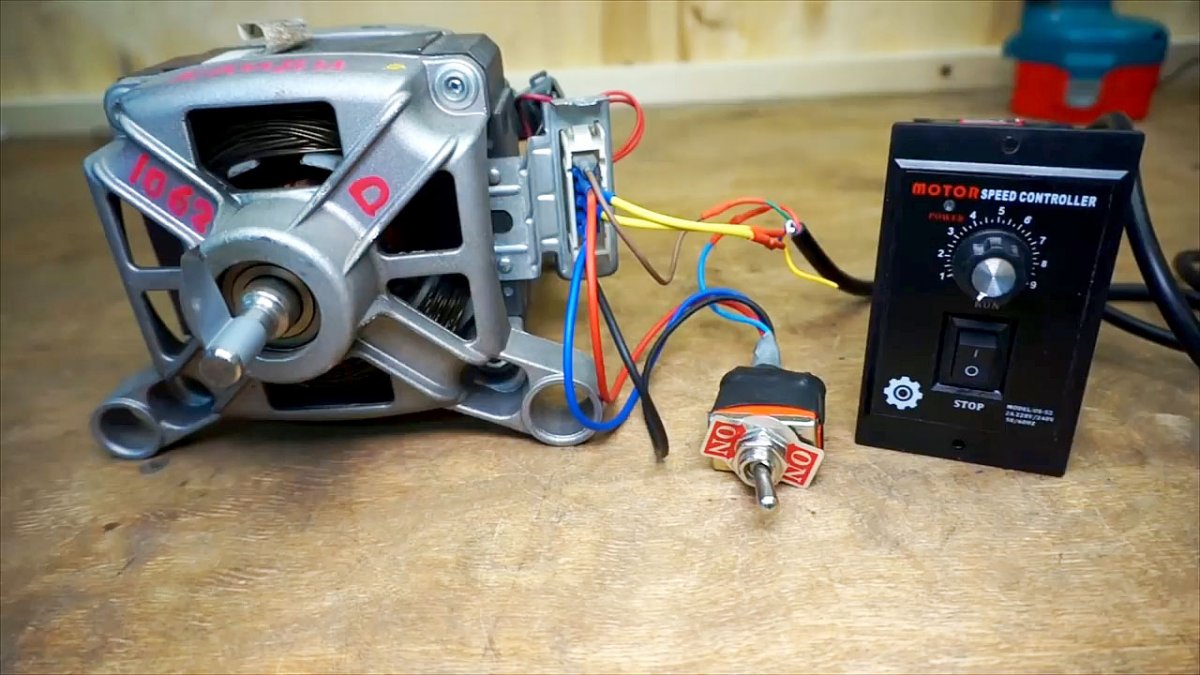
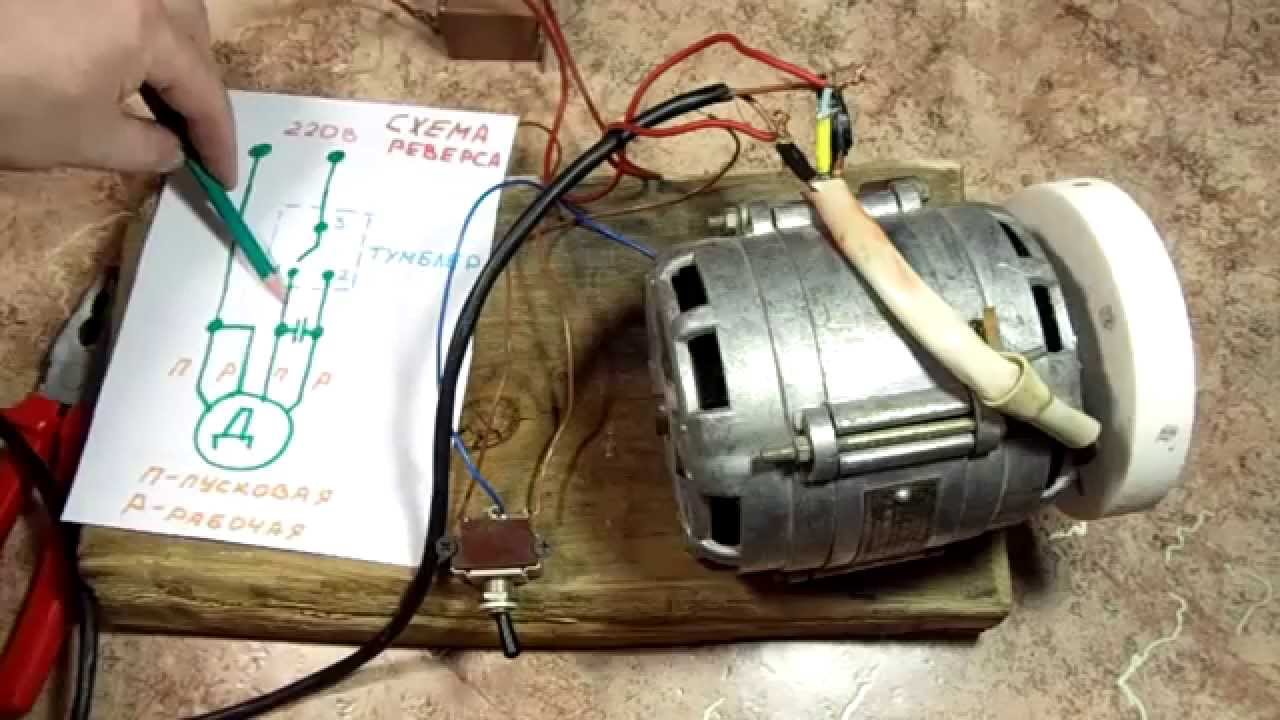
Подключение двигателя стиральной машинки, реверс, регулятор оборотов
В стиральных машинах чаще всего из строя выходит автоматика, на втором месте подшипники и резинотехнические изделия. Двигатель – самый надежный узел, его используются при изготовлении различных домашних станков. Но для этого надо уметь изменять направление вращения и регулировать скорость.Что требуется
- Тумблер с двумя группами контактов 220 В 15 А, приобрести его можно на Али Экспресс.
- Регулятор оборотов 400 Вт 220 В 50 Гц, также берите на Али Экспресс.
- Электродвигатель от автоматической стиральной машинки, подойдет почти любой марки.
- Отрезки проводов различного цвета, желательно синего (ноль) и коричневого (фаза).
- Потребуется изолента, для установки мощного радиатора купите новый и тюбик теплопроводящей пасты.
- Для проверки схемы соединения рекомендуется пользоваться обыкновенным тестером или хотя бы индикатором.

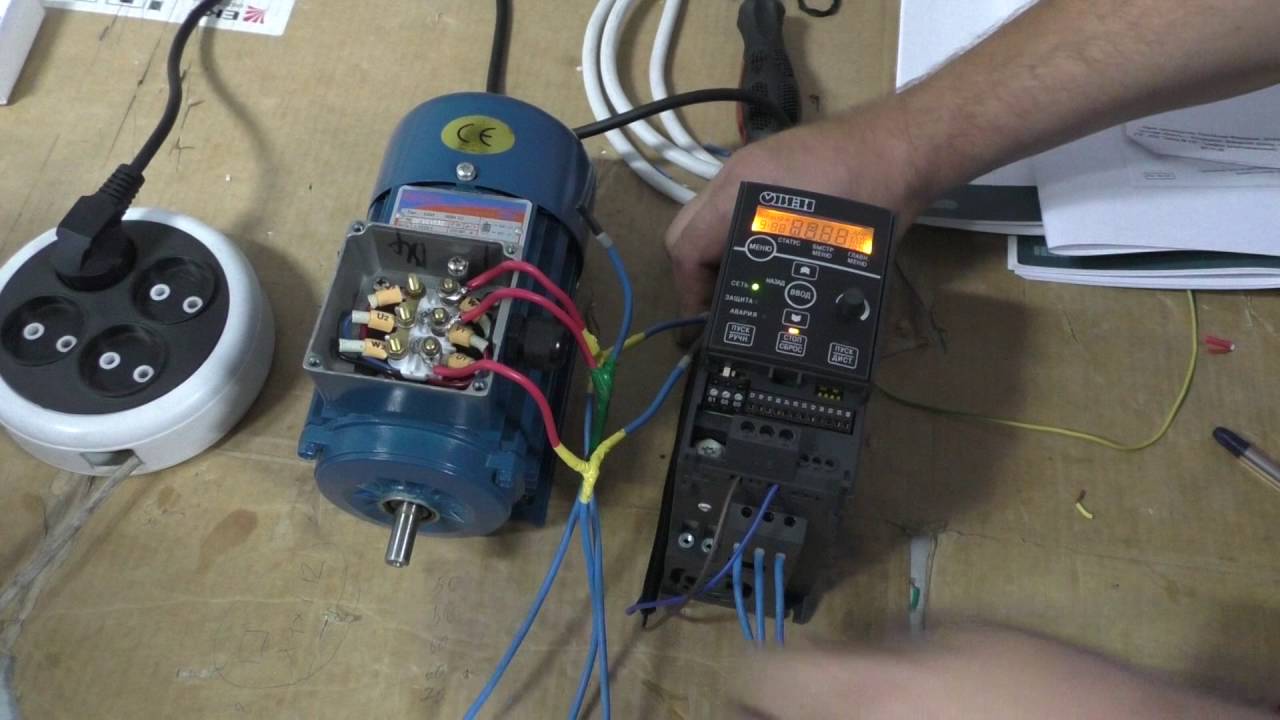
Подключение двигателя
Внимательно осмотрите клеммники снятого двигателя. На нем есть шесть выводов: два контакта идут к датчику оборотов (таходатчику) и по два контакта с обмоток ротора и статора.
Все однофазные двигатели такого типа подключаются одинаково. Выход обмотки статора надо присоединить к входу обмотки ротора. Оставшиеся два конца присоединяются к нулю и фазе.
 Нет разницы, какая именно обмотка будет первой, а какая второй.
Нет разницы, какая именно обмотка будет первой, а какая второй. Определите выходы обмоток на разъеме. Пользоваться надо тестером, один контакт постоянно держите на клемме, а второй по очереди прикладывайте к остальным. Если прибор показал короткое замыкание, то две клеммы присоединены к одной обмотке.
В нашем случае к одной обмотке подключен нижний и второй сверху контакты, а ко второй клемма над нижним и третья сверху. Соответственно, нам надо перемычкой соединить второй и третий верхние контакты. Сделайте перемычку и выполните соединение. Для гарантии опять прозвоните, теперь у вас короткое должно показывать между двумя оставшимися клеммами.
К двум оставшимся присоедините напряжение 220 В, если все в норме – двигатель начнет вращаться.
Подключение реверса
Как выше упоминалось, для изменения направления вращения необходимо поменять местами подключения одной из обмоток между собой.
И двигатель начнется вращаться в другую сторону. Проверьте правильность соединения, поменяйте местами провода на клеммнике согласно описанной схеме, включите напряжение.
 Направление вращения двигателя должно измениться на противоположное.
Направление вращения двигателя должно измениться на противоположное. Контакт, на который подавалась фаза, надо соединить со входом второй обмотки. Напряжение попадает на освободившуюся клемму, положение ноля не меняется. Изменение порядка подключения можно делать щелчками тумблера.
Переверните тумблер вверх ногами, на днище есть обозначения каждого выхода и схема их соединения в левом и правом положении переключателя.
Для облегчения понимания нарисуйте элементарную схему соединения: две обмотки и два контакта переключателя. Средние контакты по очереди присоединяются/отсоединяются к двум боковым. Подключение элементарное.
Одну обмотку соедините с крайним нижним контактом и свяжите ее перемычкой с крайним верхним. Вторую обмотку подключите к средней клемме, пусть таким образом в нашем примере будет присоединена обмотка статора.
Теперь сталось подключить ротор. Один контакт тумблера должен подключаться к выходу обмотки ротора, а второй напрямую к нулевому проводу питания.
Если все понятно, то приступайте к соединению. Сделайте по диагоналям перемычки между крайними клеммами. Один средний вывод тумблера подключается к нулю, а второй ко второй обмотке.
Присоедините все провода и еще раз проверьте правильность схемы. Средние контакты: один к нулю питания, другой к обмотке статора. Второй конец этой обмотки подключается сразу к фазе питания (коричневый провод).
Контакты по диагоналям должны иметь перемычки, провода от них идут на вторую обмотку (ротора). Перед включением обязательно проверьте тестером изменения короткого замыкания при переключении тумблера.
Тщательно заизолируйте контакты, проверьте функциональность двигателя. При переключении направление вращения должно меняться. Категорически запрещается менять направление движения до полной остановки ротора.
Регулятора оборотов, моя доработка
Если вы покупали недорогую китайскую продукцию, то надо обязательно сделать ревизию устройства. Достаньте из корпуса начинку и обратите внимание на симистор.
 В лучшем случае на нем очень маленький радиатор, не могущий эффективно отводить тепло. В худшем случае вообще ничего нет.
В лучшем случае на нем очень маленький радиатор, не могущий эффективно отводить тепло. В худшем случае вообще ничего нет. На новом радиаторе нарежьте резьбу М3, отрегулируйте его длину по размерам корпуса. Намажьте поверхность симистора термопастой и закрепите подготовленный радиатор. Соберите регулятор.
Подключите регулятора
Осмотрите устройство. Сзади на корпусе есть планка с разъемами и штекер с клеммами. Каждый контакт подписан.
Найдите на входе ноль, фазу и землю (если у вас в доме есть заземление). К ним подключается питание, в нашем случае ноль и фаза (земли нет).
Теперь следует найти выход ноля и фазы с регулятора. На крышке должна быть подробная схема с указанием назначения каждого выходного провода и его цвета.
На купленном регуляторе желтый – земля, два синих – на датчик тахометра, красный – фаза. Белый и зеленый взаимозаменяемые, но для этого надо менять положение перемычки. В нашем случае задействован зеленый. Определяется соединение прозванием выводов тестером.

Подключите синие провода к таходатчику на клеммнике двигателя. На примере к средней клемме тумблера присоединен ноль (зеленый), а к свободному контакту обмотки фаза (коричневый). Желтые провода на клеммнике присоединены к тахометру. Подайте напряжение на регулятор скорости и проверьте работу двигателя на всех режимах и скоростях.
На корпусе устройства есть специальное отверстие для регулировки режимов вращения переменным резистором. С его помощью меняется шаг изменения оборотов, вращение ротора будет начинаться не рывком, а почти с нуля. Выставьте нужные режимы.
Заключение
Любые электромонтажные работы следует делать в строгом соответствии с ПУЭ. Если вы не можете расшифровать эти три буквы без помощи интернета, то не стоит рисковать своим здоровьем.
Смотрите видео
Как подключить электродвигатель? — Электропривод
15.
Семнадцать проводов,соединяющих с коммутатором. И все это четырехфазное.И куча литературы перерыта была.
Именно такого мотора конкретно нигде не упоминается.
 03.2019 в 21:34, козлайский пипси сказал:
03.2019 в 21:34, козлайский пипси сказал:Похож на бесконтактный двигатель БК-1 или БК-2
http://xn--80aajzhcnfck0a.xn--p1ai/PublicDocuments/01-0757-01.pdf
и здесь, цитата:
За прошедшие 40 лет разработаны 4 поколения бесконтактных электродвигателей. Двигатели 4-го поколения серии БК-1 (20 модификаций), БК-2 (6 модификаций) и ДБ (5 модификаций) применяются в приводах вентиляторов и насосов систем жизнеобеспечения, в системах терморегулирования КА и скафандрах космонавтов. Только на орбитальной станции «Мир» установлено более 100 таких электродвигателей.
https://works.doklad.ru/view/QGx52nlzkpo.html
=====================
В той теме на сайте Радиокот упоминалось, что провода от мотора к плате отрезаны. Так?
Так?
цитата:
Подключал наугад в разных комбинациях,не закрутился.Надоело,бросил.слишком много вариантов перебирать.
Впринципе, запустить можно, но нужно выполнить следующее:
1. Берете двигатель. Вызваниваете провода на моторе, рисуете подробную электрическую схему.
2. Берете плату управления. По печатной плате отрисовываете электрическую схему, что с чем соединяется, куда пришло и куда вышло.
Наименование деталей и что написано на каждой детали обязательно.
И уже с электрическими схемами можно как то разговаривать.
Приблизительно что то подобное должно получится:
ps. Вопрос не соответствует разделу, попросил администрацию перенести этот интересный вопрос в Электронику. Желательно создать отдельную тему.
Подключение двигателя к контроллеру двигателя
На этом этапе вы начнете с подключения двигателей к плате контроллера двигателя, прежде чем подсоединить держатель батареи к контроллеру двигателя.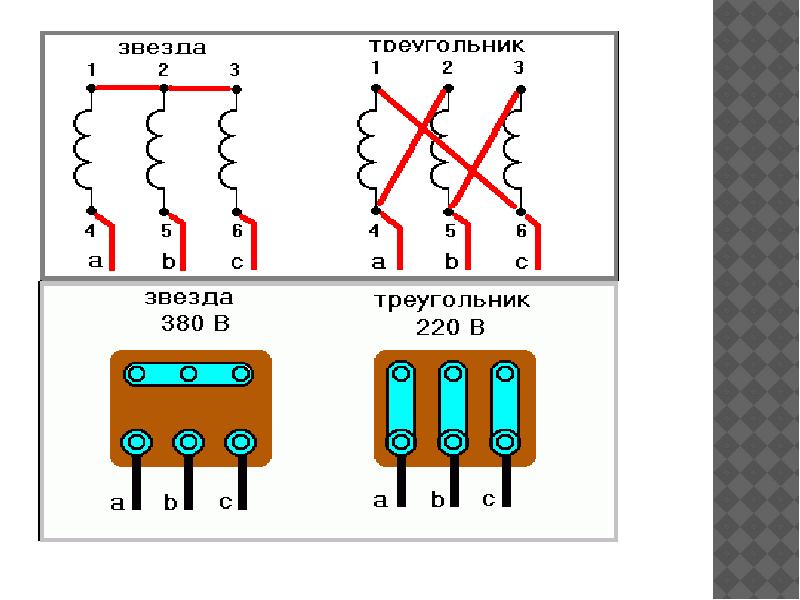
Что вам понадобится
Для этого шага вам понадобятся следующие предметы:- Плата контроллера мотора
- Два двигателя постоянного тока 3-6 В
- Четыре перемычки (вилка-вилка или женщина-вилка) или провод
- Отвертка
- Паяльник и припой
- Инструмент для зачистки проводов
- Ножницы
- Лента
Двигатели постоянного тока
Большинство двигателей постоянного тока не имеют прикрепленных к ним проводов, а это значит, что вам нужно будет прикрепить свои собственные, используя припой.Подготовка проводов
Вам понадобится два провода для каждого двигателя постоянного тока, чтобы подключить его к плате контроллера двигателя.В качестве альтернативы вы можете использовать инструменты для зачистки проводов, чтобы зачистить оба конца перемычек, чтобы обнажить оголенный провод для подключения к каждому из двигателей. Демонстрацию того, как зачистить провод с помощью приспособлений для зачистки проводов, можно увидеть в этом видео. Снимите мягкий пластиковый зажим с двигателей, чтобы можно было прикрепить провода.
Пайка проводов
Включите паяльник и дождитесь, пока он нагреется. Перед использованием очистите жало паяльника; вы можете использовать влажную губку или влажную ткань, чтобы удалить все загрязнения, пока утюг горячий. Нагрейте паяльником контакт на моторе секунду-другую. Удерживая паяльник на контакте, прикоснитесь концом припоя к жало паяльника, пока припой не расплавится. Прекратите наносить припой, как только контакт и провод соединятся припоем. Подождите минуту или две, пока припой остынет, а затем осторожно попробуйте сдвинуть провод, чтобы проверить, надежно ли он прикреплен к контакту.Если провод двигается, вы можете либо повторно нагреть нанесенный припой с помощью паяльника и выровнять провод, либо нанести больше припоя на соединение. Старайтесь не касаться паяльником пластикового покрытия проводов или любого пластика между двумя контактами, иначе пластик расплавится и начнет дымиться. Дополнительные советы и рекомендации можно найти в этом руководстве по пайке.
Как только провода будут надежно припаяны к моторам, обрежьте их концы ножницами. Если провода случайно коснутся металлического корпуса при включенном питании, это может привести к короткому замыканию и прекращению подачи постоянного питания на двигатель.Снова прикрепите пластиковые зажимы к моторам. Также рекомендуется обернуть конец двигателей, к которому вы прикрепили провод, изолентой, чтобы защитить соединение и помочь сохранить припой в хорошем состоянии.
Старайтесь не касаться паяльником пластикового покрытия проводов или любого пластика между двумя контактами, иначе пластик расплавится и начнет дымиться. Дополнительные советы и рекомендации можно найти в этом руководстве по пайке.
Как только провода будут надежно припаяны к моторам, обрежьте их концы ножницами. Если провода случайно коснутся металлического корпуса при включенном питании, это может привести к короткому замыканию и прекращению подачи постоянного питания на двигатель.Снова прикрепите пластиковые зажимы к моторам. Также рекомендуется обернуть конец двигателей, к которому вы прикрепили провод, изолентой, чтобы защитить соединение и помочь сохранить припой в хорошем состоянии.Подключите моторы к плате контроллера мотора
Плата контроллера мотора обычно имеет винтовые клеммы для подключения к ней мотора. Для работы двигателя постоянного тока необходимы две винтовые клеммы, а для серводвигателя — четыре клеммы. Четыре клеммы OUT на используемой мной плате обведены зеленым кружком ниже.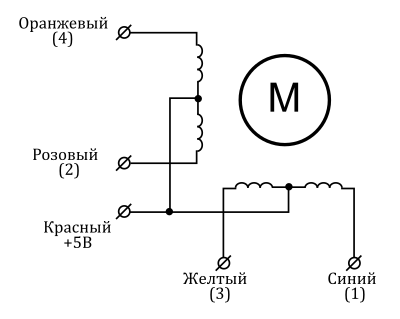 Двигатель постоянного тока должен использовать два провода, чтобы он мог вращаться вперед и назад. Отправка сигнала высокого уровня на один провод и сигнала низкого уровня на другой поворачивает двигатель в одном направлении, а перестановка сигналов поворачивает двигатель в другом направлении.
С помощью отвертки ослабьте винты в клеммных колодках с маркировкой OUT1 , OUT2 , OUT3 и OUT4 . Если у вас другие метки, посмотрите документацию к вашей плате.
Зачистите концы проводов; вы можете отрезать концы, если вам нужно.Вставьте зачищенные концы одного двигателя в клеммы OUT1 и OUT2 , а зачищенные концы второго двигателя в клеммы OUT3 и OUT4 . Затяните винты, чтобы провода надежно закрепились в клеммных колодках.
Двигатель постоянного тока должен использовать два провода, чтобы он мог вращаться вперед и назад. Отправка сигнала высокого уровня на один провод и сигнала низкого уровня на другой поворачивает двигатель в одном направлении, а перестановка сигналов поворачивает двигатель в другом направлении.
С помощью отвертки ослабьте винты в клеммных колодках с маркировкой OUT1 , OUT2 , OUT3 и OUT4 . Если у вас другие метки, посмотрите документацию к вашей плате.
Зачистите концы проводов; вы можете отрезать концы, если вам нужно.Вставьте зачищенные концы одного двигателя в клеммы OUT1 и OUT2 , а зачищенные концы второго двигателя в клеммы OUT3 и OUT4 . Затяните винты, чтобы провода надежно закрепились в клеммных колодках.Обсуждение
Были ли у вас проблемы с подключением моторов к контроллеру мотора? Вам нужна помощь с чем-то, что не работает должным образом? Если да, дайте нам знать в комментариях ниже.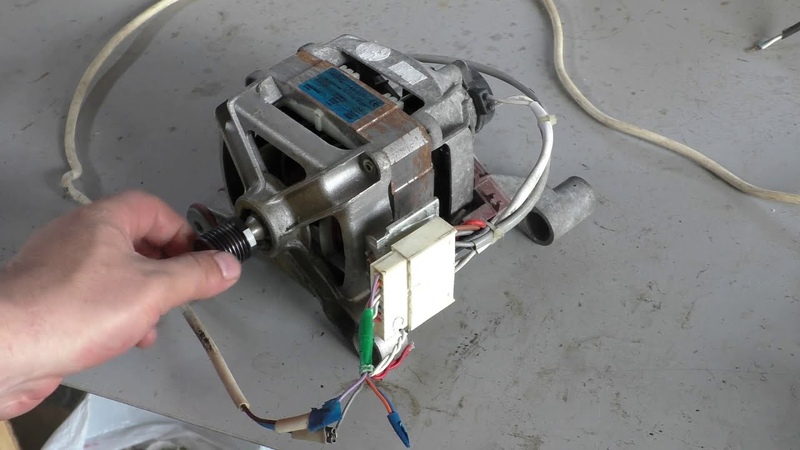
Выбор и подключение шаговых двигателей
В платах Duet используются драйверы биполярных шаговых двигателей.Это означает, что вы можете использовать шаговые двигатели, подходящие для биполярного привода, которые имеют 4, 6 или 8 проводов. Вы не можете использовать двигатели с 5 проводами, потому что они предназначены для работы только в однополярном режиме. (Некоторые униполярные двигатели можно превратить в биполярные, вырезав дорожку на печатной плате.)
Проще всего подключить 4-проводные двигатели. Внутри шагового двигателя находятся две катушки, каждая из которых имеет провод, подключенный к каждому концу. Пары проводов и катушек называются фазой. 4 провода соответствуют 4 выходным контактам каждого шагового драйвера на Duet (см. Ниже для определения фаз и подключения).
Ниже для определения фаз и подключения).
В 6-проводных шаговых двигателях по-прежнему используются 2 катушки, но каждая катушка имеет центральный отвод, что при необходимости эффективно разрезает катушку пополам. Это создает дополнительный провод для каждой катушки. Вы можете запустить их в режиме полукатушки, оставив два концевых провода неподключенными, или в режиме полной катушки, оставив центральные провода неподключенными. Ознакомьтесь со спецификацией двигателя, чтобы убедиться, что ваш Duet может обеспечивать достаточный ток для того, как вы хотите их подключить.
8-проводный шаговый двигатель имеет 4 катушки, поэтому с двумя проводами на катушку получается 8 проводов.Вы можете запустить 8-проводный шаговый двигатель в режиме полукатушки (с подключенными только 2 катушками) или в режиме полной катушки, а в режиме полной катушки вы можете подключить катушки последовательно или параллельно. В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном итоге для подключения к Duet нам осталось всего 4 провода.
В конечном итоге для подключения к Duet нам осталось всего 4 провода.
Это максимальный ток, который вы можете пропустить через обе обмотки одновременно. Максимальный ток через одну обмотку (что действительно важно при использовании микрошага) редко указывается и будет немного выше.Тем не менее, даже если одна обмотка работает на указанном номинальном токе, двигатель будет очень горячим. Таким образом, обычно устанавливается ток двигателя не более 85% от номинального тока. Следовательно, чтобы получить максимальный крутящий момент от ваших двигателей без их перегрева, вы должны выбирать двигатели с номинальным током не более чем на 25% выше рекомендованного максимального тока шагового драйвера. Это дает:
- Duet 0.6 и Duet 0.8.5 (рекомендуемый максимальный ток двигателя 1,5 А, пик) => Номинальный ток шагового двигателя <= 1.9A
- Duet 2 WiFi и Duet 2 Ethernet (максимальный ток двигателя 2,5 А, пик) => Номинальный ток шагового двигателя <= 3,0 А
- Duet 2 Maestro (максимальный ток двигателя 1,6 А, пик при хорошем охлаждении вентилятора) => Номинальный ток шагового двигателя ток <= 1,7 А. Более того, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, тогда драйверы будут работать меньше.
- Основная плата Duet 3 6HC и плата расширения 3HC (рекомендуемый максимальный ток двигателя 6,3 A пик / 4,45 A RMS) => Номинальный ток шагового двигателя <= 6A
- Duet 3 Tooboard (рекомендуемый максимальный ток двигателя 1.4A пик) => номинальный ток шагового двигателя <= 1,75A
 Более того, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, тогда драйверы будут работать меньше.
Более того, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, тогда драйверы будут работать меньше. Это максимальный крутящий момент, который двигатель может обеспечить с обеими обмотками, запитанными на полный ток, прежде чем он начнет скачкообразно ступеньки. Удерживающий момент, когда одна обмотка находится под напряжением при номинальном токе, примерно в 1 / sqrt (2) раза больше. Крутящий момент пропорционален току (за исключением очень низких токов), поэтому, например, если вы установите драйверы на 85% номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, соответствующего току в его обмотках. Когда шаговый двигатель ускоряется, он должен создавать крутящий момент, чтобы преодолеть инерцию собственного ротора и массу нагрузки, которую он ведет. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла. В свою очередь, нагрузка будет отставать от позиции, заданной прошивкой.
Иногда можно увидеть, что микрошаг уменьшает крутящий момент.На самом деле это означает, что, когда предполагается, что угол запаздывания равен углу, соответствующему одному микрошагу (потому что вы хотите, чтобы положение было точным с точностью до одного микрошага), более высокий микрошаг подразумевает меньший угол запаздывания и, следовательно, меньший крутящий момент. Крутящий момент на единицу угла запаздывания (что действительно имеет значение) не уменьшается с увеличением микрошага. Другими словами, отправка двигателю одного микрошага 1/16 приводит к точно таким же фазным токам (и, следовательно, тем же силам), что и отправка ему двух микрошагов 1/32 или четырех микрошагов 1/64 и так далее.
Существует два соответствующих размера: номер размера Nema и длина. Номер размера Nema определяет квадратный размер корпуса и положение монтажных отверстий. Самым популярным размером для 3D-принтеров является Nema 17, который имеет квадрат не более 42,3 мм и крепежные отверстия в квадрате со стороной 31 мм.
Двигатели Nema 17 бывают разной длины, от «блинов» длиной 20 мм до двигателей длиной 60 мм. Как правило, чем длиннее двигатель, тем больше его удерживающий момент при номинальном токе.Более длинные шаговые двигатели также имеют большую инерцию ротора. Все Duets должны иметь возможность управлять ими, хотя некоторые двигатели Nema 17 могут быть рассчитаны на ток до 2 А, что находится на пределе Duet 2 Maestro (хотя вы всегда можете запускать двигатели с меньшим током).
Двигатели Nema 23 обладают более высоким крутящим моментом, чем двигатели Nema 17. Duet 2 (Wi-Fi и Ethernet) может управлять ими, если вы внимательно их выбираете, особенно в отношении номинального тока, до максимум около 2,8 А. Duet 3 должен иметь возможность управлять более крупными двигателями, до 5.5А. Вы должны использовать питание 24 В для Duet 2 и 32 В для Duet 3 для более мощных двигателей.
Duet 3 должен иметь возможность управлять более крупными двигателями, до 5.5А. Вы должны использовать питание 24 В для Duet 2 и 32 В для Duet 3 для более мощных двигателей.
Двигатели Nema 34 еще больше, с большим крутящим моментом и обычно используются в приложениях с ЧПУ. Duet 3 также может управлять этими двигателями до 5,5 А. Для достижения высоких скоростей с большими двигателями вам может потребоваться более высокое напряжение, чем максимальное 32 В для Duet 3. Можно модифицировать Duet 3, увеличив его до 48 В и, возможно, до 60 В (что является пределом для шагового драйвера), хотя это аннулирует вашу гарантию; см. https: // форум.duet3d.com/post/133293
Существует два общих угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам / оборот. В большинстве 3D-принтеров используются двигатели 1,8 градуса на шаг.
Если не считать очевидной разницы в угле шага:
- Двигатели 0,9 градуса имеют немного более низкий удерживающий момент, чем аналогичные двигатели 1,8 градуса от того же производителя
- Однако для получения заданного крутящего момента угол запаздывания, необходимый для двигателя 0,9 градуса, составляет чуть больше половины угла запаздывания аналогичного 1 . 8градусный мотор. Или, другими словами, при малых углах задержки двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле задержки.
- При заданной скорости вращения двигатель 0,9 градуса производит вдвое большую индуктивную обратную ЭДС, чем двигатель 1,8 градуса. Таким образом, вам обычно нужно использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
- Двигатели с 0,9 градусом нуждаются в шаговых импульсах, которые должны подаваться на драйверы с удвоенной скоростью по сравнению с двигателями 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать ступенчатые импульсы.Для решения этой проблемы можно использовать режим интерполяции с микрошагом 16x драйверов TMC2660 на Duet 2 WiFi / Ethernet. Драйверы Duet 2 Maestro и Duet 3 могут интерполировать при любой настройке микрошага.
 8градусный мотор. Или, другими словами, при малых углах задержки двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле задержки.
8градусный мотор. Или, другими словами, при малых углах задержки двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле задержки. Индуктивность двигателя влияет на то, насколько быстро драйвер шагового двигателя может управлять двигателем, прежде чем крутящий момент упадет. Если мы временно проигнорируем обратную ЭДС из-за вращения (см. Ниже) и номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное количество оборотов в секунду до падения крутящего момента составит:
Если мы временно проигнорируем обратную ЭДС из-за вращения (см. Ниже) и номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное количество оборотов в секунду до падения крутящего момента составит:
оборотов_за_секунду = (2 * напряжение_питания) / (шагов_на_об * пи * индуктивность * ток)
Если двигатель приводит в движение ремень GT2 через шкив, это дает максимальную скорость в мм / с как:
скорость = (4 * зубцы шкива * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Пример: a 1.Двигатель с 8 градусами на шаг (т.е. 200 шагов на оборот) с индуктивностью 4 мГн работает при 1,5 А с использованием источника питания 12 В, а привод ремня GT2 с шкивом с 20 зубьями начнет терять крутящий момент примерно со скоростью 250 мм / с. Это скорость ленты, которая на принтере CoreXY или delta отличается от скорости головки.
На практике крутящий момент упадет раньше, чем это, из-за обратной ЭДС, вызванной движением, и потому, что вышеупомянутое не учитывает сопротивление обмотки. Двигатели с низкой индуктивностью также имеют низкую обратную ЭДС из-за вращения.
Это означает, что если мы хотим достичь высоких скоростей, нам нужны двигатели с низкой индуктивностью и высокое напряжение питания. Максимальное рекомендуемое напряжение питания для Duet 2 WiFi / Ethernet составляет 25 В, для Duet 2 Maestro — 28 В, а для Duet 3 — 32 В.
Это просто сопротивление каждой фазы и падение напряжения на каждой фазе, когда двигатель неподвижен и фаза проходит свой номинальный ток (который является произведением сопротивления и номинального тока). Это неважно, за исключением того, что номинальное напряжение должно быть значительно ниже напряжения питания шаговых драйверов.
При вращении шагового двигателя возникает обратная ЭДС. При идеальном угле нулевого запаздывания он на 90 градусов не совпадает по фазе с управляющим напряжением и совпадает по фазе с обратной ЭДС из-за индуктивности. Когда двигатель развивает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.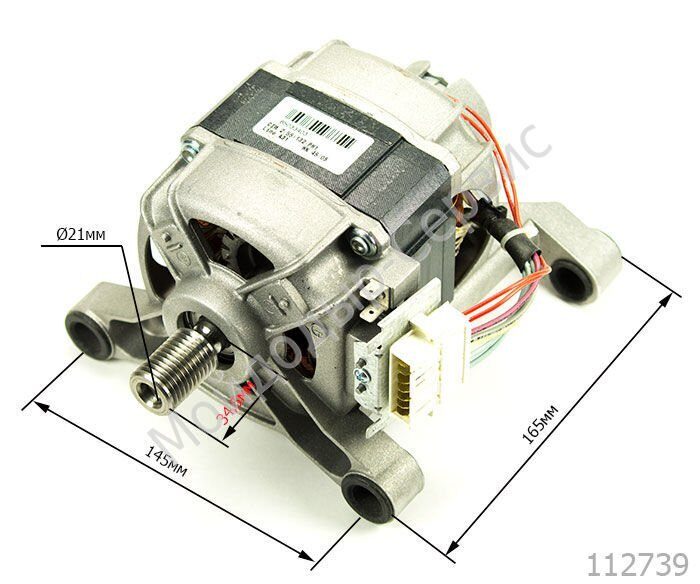
Обратная ЭДС из-за вращения обычно не указывается в технических данных, но мы можем оценить ее по следующей формуле:
приблизительный_пик_бэк_emf_due_to_rotation = sqrt (2) * пи * номинальный_ крутящий момент * обороты_в_секунду / номинальный_ток
Формула предполагает, что удерживающий момент задан для обеих фаз, запитанных номинальным током.Если указано, что только одна фаза находится под напряжением, замените sqrt (2) на 2.
Пример: рассмотрим шаговый двигатель 200, приводящий в движение каретку через шкив с 20 зубьями и ремень GT2. Это движение 40 мм на оборот. Чтобы достичь скорости 200 мм / сек, нам нужно 5 об / сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы управляются с током 1,68 А, пиковая обратная ЭДС из-за вращения будет 1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Насколько точна эта формула? dc42 измерил, а затем рассчитал обратную ЭДС для двух типов двигателей:
- 17HS19-1684S: измерено 24 В, рассчитано 24. 24 В при условии, что удерживающий крутящий момент указан с обеими фазами, запитанными при номинальном токе.
- JK42HS34-1334A: измерено 22 В, рассчитано 15,93 В с учетом удерживающего момента 0,22 Нм при подаче напряжения на обе фазы при номинальном токе. Возможно, удерживающий момент для этого двигателя указан только для одной фазы под напряжением, и в этом случае расчетное значение станет 22,53 В. Я также видел удерживающий момент для этого двигателя, указанный в другом техническом описании как 0,26 Нм, что увеличивает расчетное значение до 18,05 В.
 24 В при условии, что удерживающий крутящий момент указан с обеими фазами, запитанными при номинальном токе.
24 В при условии, что удерживающий крутящий момент указан с обеими фазами, запитанными при номинальном токе.Если у вас есть целевая скорость движения для вашего принтера, вы можете определить, по крайней мере, приблизительно, какое напряжение питания вам понадобится для драйверов двигателей. Вот как это на примере расчета:
- Определитесь с целевой скоростью движения. В этом примере я буду использовать 200 мм / сек.
- Исходя из заданной скорости движения, определите максимальную скорость ленты для наихудшего случая. Для декартового принтера наихудший случай — это чистое движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай — это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай — это радиальное перемещение у края станины, а наихудший случай скорости ленты — это скорость движения, деленная на тангенс угла (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость движения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200 / тангенс (30 градусов) = 346 мм / сек.
- Определите число оборотов двигателя в секунду при максимальной скорости ремня, разделив скорость ремня на шаг зубьев ремня (2 мм для ремней GT2) и количество зубьев на шкиве. Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
- Вычислить пиковую обратную ЭДС из-за индуктивности. Это обороты_за_секунду * пи * мотор_ток * мотор_индуктивность * N / 2, где N — количество полных шагов на оборот (так 200 для 1.Двигатели 8deg или 400 для двигателей 0.9deg). Мои двигатели имеют 0,9 градуса с индуктивностью 4,1 мГн, и я обычно использую их при токе 1 А. Таким образом, обратная ЭДС из-за индуктивности составляет 8,7 * 3,142 * 1,0 * 4,1e-3 * 400/2 = 22,4 В.
- Рассчитайте примерную обратную ЭДС за счет вращения. Из приведенной ранее формулы это sqrt (2) * pi * Rated_holding_torque * revs_per_second / Rated_current. Мои двигатели имеют номинальный ток 1,68 А и удерживающий момент 0,44 Нм, поэтому результат 1,414 * 3,142 * 0,44 * 8,7 / 1,68 = 10,1 В
- Желательно, чтобы напряжение питания драйвера было как минимум суммой этих двух обратных ЭДС. , плюс еще несколько вольт.Если у вас есть два двигателя, подключенных последовательно, то требуемое напряжение увеличивается вдвое.
 Для декартового принтера наихудший случай — это чистое движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай — это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай — это радиальное перемещение у края станины, а наихудший случай скорости ленты — это скорость движения, деленная на тангенс угла (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость движения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200 / тангенс (30 градусов) = 346 мм / сек.
Для декартового принтера наихудший случай — это чистое движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай — это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай — это радиальное перемещение у края станины, а наихудший случай скорости ленты — это скорость движения, деленная на тангенс угла (тета), где тета — это наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость движения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ленты составляет 200 / тангенс (30 градусов) = 346 мм / сек. Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
В моем примере это дает 32,5 В, что выше рекомендуемого входного напряжения 25 В для Duet 2. Но, по крайней мере, мы знаем, что для наихудшего случая дельта-перемещения со скоростью движения 200 мм / с, если я использую 24 В. тогда мощность составляет более 2/3 от теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен уменьшаться более чем примерно на 1/3 от обычного доступного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно — это объясняет, почему я смог достичь только 150 мм / сек, прежде чем я обновил принтер до 24 В.
На https://www.reprapfirmware.org/ есть онлайн-калькулятор, позволяющий сделать это наоборот (т.е. вычислить скорость, с которой начинает падать крутящий момент).
- Если вы не будете использовать внешние драйверы шагового двигателя, выбирайте двигатели с номинальным током не менее 1,2 А и не более 2,0 А для Duet 0.6 и Duet 0.8.5, 3 А для Duet 2, 7 А для Duet 3 основного и платы расширения и 1,7 А для панелей инструментов Duet 3 или Duet 2 Maestro.
- Запланируйте работу каждого шагового двигателя на уровне от 50% до 85% его номинального тока.
- Размер: Nema 17 — самый популярный размер, используемый в 3D-принтерах. Nema 14 — это альтернатива экструдеру с высоким редуктором. Используйте двигатели Nema 23, если вы не можете получить достаточный крутящий момент от длинных двигателей Nema 17. Duet 3 также может приводить в движение моторы Nema 34.
- Избегайте двигателей с номинальным напряжением (или произведением номинального тока и фазного сопротивления)> 4 В или индуктивностью> 4 мГн.
- Выберите 0,9 град. / Шаговые двигатели, если вам нужна дополнительная точность позиционирования, например для башенных двигателей дельта-принтера.В противном случае выберите 1,8-градусные / шаговые двигатели.
- Если вы используете какие-либо двигатели с шагом 0,9 градуса / шаг или двигатели с высоким крутящим моментом, используйте питание 24 В, чтобы вы могли поддерживать крутящий момент на более высоких скоростях.
- При использовании экструдера с высоким приводом (например, экструдера, в котором используется гибкий приводной кабель для передачи крутящего момента от двигателя на червячный редуктор), используйте короткий маломощный двигатель 1,8 град / шаг / шаг для его приведения в действие.
Номера дисков, используемые в G-коде, соответствуют следующим меткам драйверов на плате (ах):
| Номер накопителя | Duet 3 этикетка платы | Duet 2 WiFi / Ethernet этикетка платы | Duet 2 Maestro этикетка платы | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 0 | DRIVER_0 | X | DRIVER_1 | Y | |||||
| 2 | DRIVER_2 | ZA ZB (два соединенных последовательно соединенных разъема) | |||||||
| 3 | DRIVER_3 | E0 | |||||||
| 4 | DRIVER | 9020 DRIVER_5 | E2 (на Duex 2/5) | E2 (контакты для внешнего драйвера) | |||||
| 6 | E3 (On Duex 2/5) | E3 (контакты для внешнего драйвера) | |||||||
| 7 | E4 (On Duex 5) | ||||||||
| 8 | E5 (On Duex 5) | ||||||||
| 9 | E6 (On Duex 5) | ||||||||
| 10 | На заголовке LCD_CONN | ||||||||
| 11 | На заголовке LCD_CONN | ||||||||
Чтобы увидеть точное расположение контактов, проверьте электрические схемы здесь:
Схема подключенияDuet 3
Схема подключенияDuet 2 WiFi / Ethernet
Схема подключенияDuet 2 Maestro
Duet 3 имеет 6 встроенных шаговых драйверов. Duet 2 WiFi, Ethernet и Maestro имеют 5 встроенных драйверов шагового двигателя.
Duet 2 WiFi, Ethernet и Maestro имеют 5 встроенных драйверов шагового двигателя.
Для подключения шаговых двигателей к внутренним драйверам см. Электрическую схему Duet 3, электрическую схему Duet 2 WiFi / Ethernet или электрическую схему Duet 2 Maestro. Распиновка каждого разъема шагового двигателя такая же, как у другой популярной электроники 3D-принтера.
Для ВСЕХ ДУЭТОВ необходимо подключить два провода одной фазы шагового двигателя к двум контактам на одном конце разъема, а провода другой фазы — к двум контактам на другом конце. См. Следующий раздел, чтобы определить фазы вашего двигателя.
Каждый разъем шагового двигателя имеет четыре контакта. В Duet 2 WiFi / Ethernet они обозначены «2B 2A 1A 1B» на задней стороне платы и на схеме подключения. «1» и «2» относятся к катушке или фазе, «A» и «B» относятся к положительному и отрицательному.
В моделях Duet 2 Maestro и Duet 3 четыре контакта разъема двигателя помечены как «B1 B2 A1 A2» на задней стороне платы и на схеме подключения. «A» и «B» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
«A» и «B» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
Осторожно! Перепутывание фаз на 4-контактном разъеме может и часто приводит к повреждению шагового драйвера. Итак, убедитесь, что вы знаете, какие пары проводов принадлежат одной и той же фазе. Неважно, какую фазу вы подключаете к какой паре контактов или в каком направлении вы подключаете каждую фазу: поменять местами две фазы или поменять местами пару проводов в фазе просто заставит двигатель повернуться в другую сторону, что вы можно поправить в конфиге.g файл.
Будьте особенно осторожны при использовании шаговых двигателей со съемным кабелем! Двигатель Nema 17 со съемным кабелем обычно имеет 6-контактный разъем JST, но разные производители используют разные распиновки на этом разъеме. Всегда проверяйте фазы шагового двигателя (см. Следующий раздел) при использовании двигателей со съемными кабелями.
Настоятельно рекомендуется заземлить корпуса шаговых двигателей , особенно в принтерах с ременным приводом.В противном случае движение ремней вызовет накопление статического заряда, который в конечном итоге переместится на обмотки. Движение нити в экструдерах также может вызвать накопление статического заряда на приводном двигателе экструдера. Если моторы привинчены к металлической раме, достаточно заземления рамы.
Вот два способа соединить провода шагового двигателя в фазы:
- Используйте мультиметр. Между двумя проводами, принадлежащими одной и той же фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими разным фазам, не должно быть непрерывности.
- Когда провода двигателя ни к чему не подключены, вращайте шпиндель между пальцами. Замкните два провода вместе, затем снова закрутите шпиндель. Если вращать намного сложнее, чем раньше, эти два провода принадлежат одной и той же фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.

Если у вас два шаговых двигателя Z, подключите их к разъемам ZA и ZB. Эти разъемы подключены последовательно, что лучше, чем подключение их параллельно для большинства типов шаговых двигателей, используемых в 3D-принтерах.
Если у вас только один шаговый двигатель Z, подключите его к разъему ZA и вставьте две перемычки в разъем ZB. Платы Duet 2 обычно поставляются с уже установленными перемычками.
Если у вас есть два шаговых двигателя Z, то для типов двигателей, обычно используемых в RepRaps (т. Е. С номинальным током в диапазоне от 1,2 до 2,0 А), лучше соединять их последовательно, чем параллельно. Google «Последовательное подключение шаговых двигателей» для получения инструкций о том, как это сделать, например:
http: // www.Instructables.com/id/Wiring-Y …]
Некоторые недавние комплекты китайских 3D-принтеров имеют слаботочные Z-шаговые двигатели, которые вместо этого предназначены для параллельного подключения. Если двигатели имеют номинальный ток 1,0 А или ниже, подключите их параллельно.
Используйте команду M584 (см. Http: //reprap.org/wiki/G-code#M584: _Set _…), чтобы указать, какие драйверы используются для соответствующей оси. Вы должны использовать RepRapFirmware 1.14 или новее.
Дополнительные сведения см. На странице использования внешних драйверов
Если ваши двигатели имеют номинал выше примерно 2.8A, и вы используете Duet 2 (Wi-Fi или Ethernet), или выше примерно 2A, и вы используете Duet 2 Maestro или устаревшие Duet 0.6 или 0.8.5, или если им требуется более высокое напряжение, чем может обеспечить Duet, тогда вы нужны внешние драйверы шагового двигателя. Обычно они имеют оптически изолированные входы step / dir / enable. Например, драйверы шагового двигателя с номинальным током до 5 А с использованием микросхемы шагового драйвера TB6600 широко доступны на eBay.
Если драйверам требуется не более 2 мА при 3 В на входах step, dir и enable, то вы можете управлять ими напрямую от разъема расширения Duet.Распиновку разъема расширения см.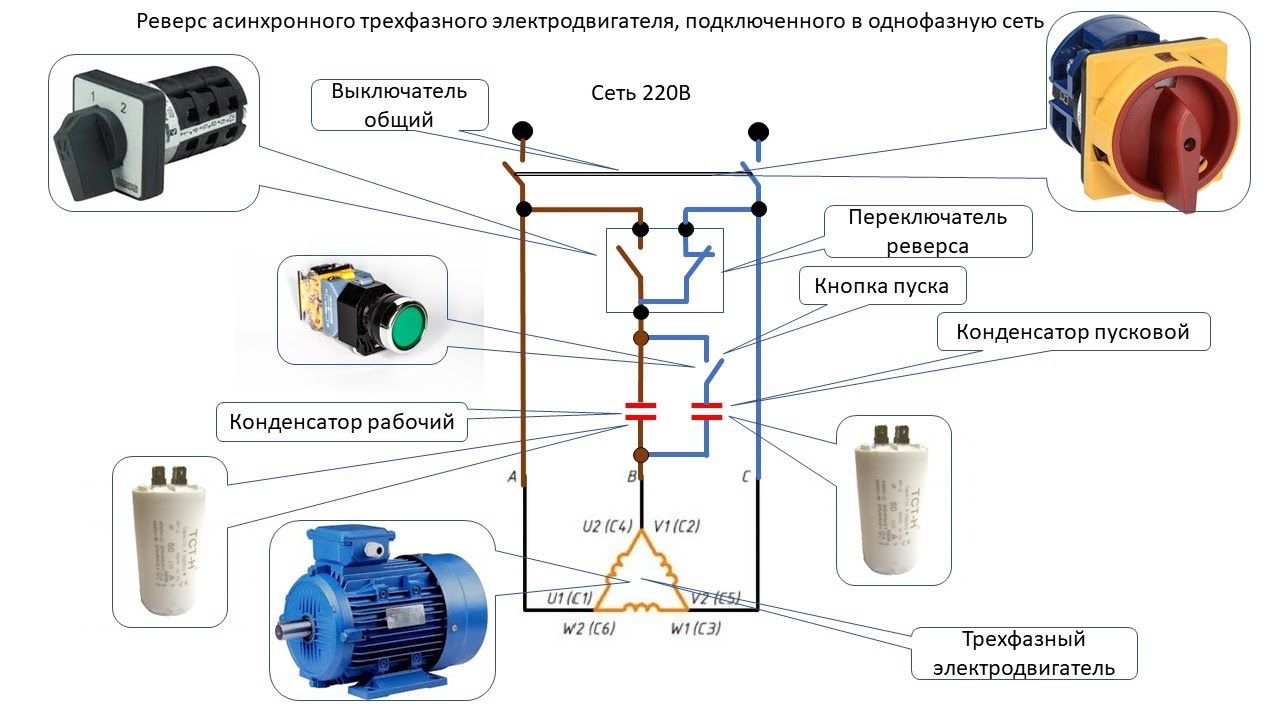 На схемах подключения Wi-Fi / Ethernet Duet 2. В противном случае вам следует использовать микросхемы смещения уровня от 3,3 В до 5 В, такие как 74HCT04, чтобы повысить уровень сигнала до 5 В и управлять ими. Для этой цели вы можете использовать Duet Expansion Breakout Board.
На схемах подключения Wi-Fi / Ethernet Duet 2. В противном случае вам следует использовать микросхемы смещения уровня от 3,3 В до 5 В, такие как 74HCT04, чтобы повысить уровень сигнала до 5 В и управлять ими. Для этой цели вы можете использовать Duet Expansion Breakout Board.
Чтобы переназначить двигатели X, Y или Z на внешние драйверы в RepRapFirmware 1.14 или новее, используйте команду M584 (см. Gcode M584). Сигналы включения на разъеме расширения по умолчанию активны на низком уровне, но вы можете изменить это с помощью команды M569 (см. Gcode M569).Вы также можете установить минимальную ширину шагового импульса в команде M569 (попробуйте 1us или 2us при использовании внешних драйверов) и настроить направление.
Перед выполнением этого шага временно разрешите перемещение оси без возврата в исходное положение, перейдя в консоль G-кода и введя: M564 S0 H0
Вернитесь на страницу управления машиной. В это время мы проверим работу наших шаговых двигателей.
Переместите каждый шаговый двигатель по отдельности на 1 мм в каждом направлении.
Обратите внимание, что шаговый двигатель не может быть перемещен до начала отсчета, если только команда M564 не используется для отмены этого безопасного значения по умолчанию.
Amazon.com: Connect Ease CE12VBOMK Комплект для подключения подвесного мотора Easy 12V: Спорт и туризм
| Цена: | 34 доллара.20 $ 34,20 + $ 18,73 перевозки |
 73 Доставка в РФ Подробности
73 Доставка в РФ Подробности | Марка | Connect-Ease |
| Режим работы | 12v |
| Напряжение | 12 Вольт |
- Убедитесь, что это подходит
введя номер вашей модели.
- UL1426 / BC-5W2 Морской провод
- (1) — Разъем для аккумулятора Easy 12 Volt 6 AWG, (2) Разъемы проводов 6 AWG с корпусом
- Допускается использование соленой воды
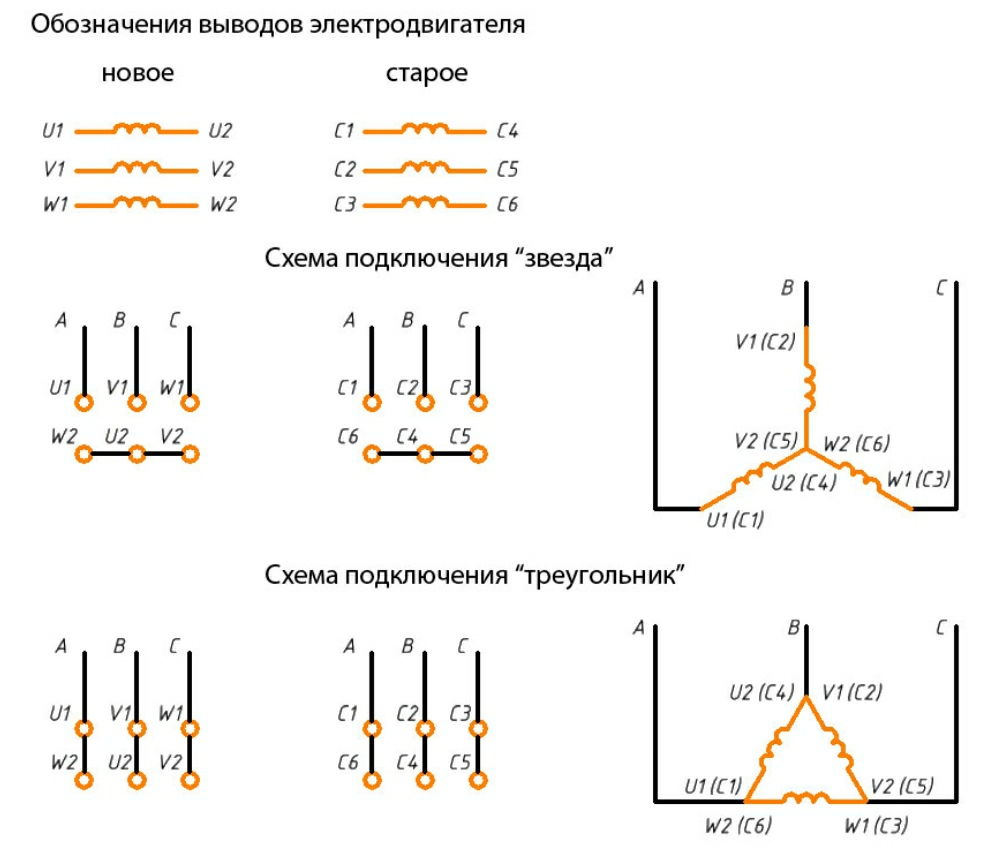
Должен ли я подключать двигатель звездой или треугольником? — MVOrganizing
Следует подключать двигатель звездой или треугольником?
Двигатели, 400 В, треугольник / 690 В, всегда должны подключаться по схеме треугольника к источнику питания 400 В, поскольку подключение звездой дает 1/3 номинальной выходной мощности (как указано выше), поэтому, если требуется только 1/3 мощности, то меньшее, следует использовать более дешевый мотор.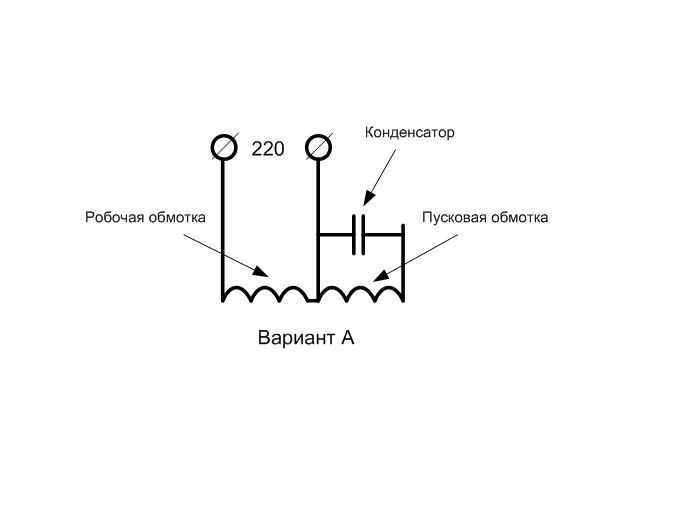
Почему трехфазный двигатель подключен по схеме звезда-треугольник?
Во время пуска обмотки двигателя соединяются звездой, и это снижает напряжение на каждой обмотке 3. Это также снижает крутящий момент в три раза. Пускатель звезда / треугольник (или звезда / треугольник) является одним из самых дешевых электромеханических пускателей пониженного напряжения, которые могут быть применены.
В чем разница между соединением треугольником и звездой в двигателе?
Двигатели, подключенные звездой, имеют центральную точку подключения, называемую точкой короткого замыкания или точкой звезды, и каждая обмотка получает фазное напряжение (230 В), двигатель, подключенный звездой, работает только с одной третью номинального крутящего момента и мощности двигателя, тогда как двигатели, подключенные по схеме треугольника, не имеют подключенная точка и каждая обмотка получает линию…
Что произойдет, если электродвигатель треугольником в звезду?
Двигатель, соединенный треугольником, потребляет 1.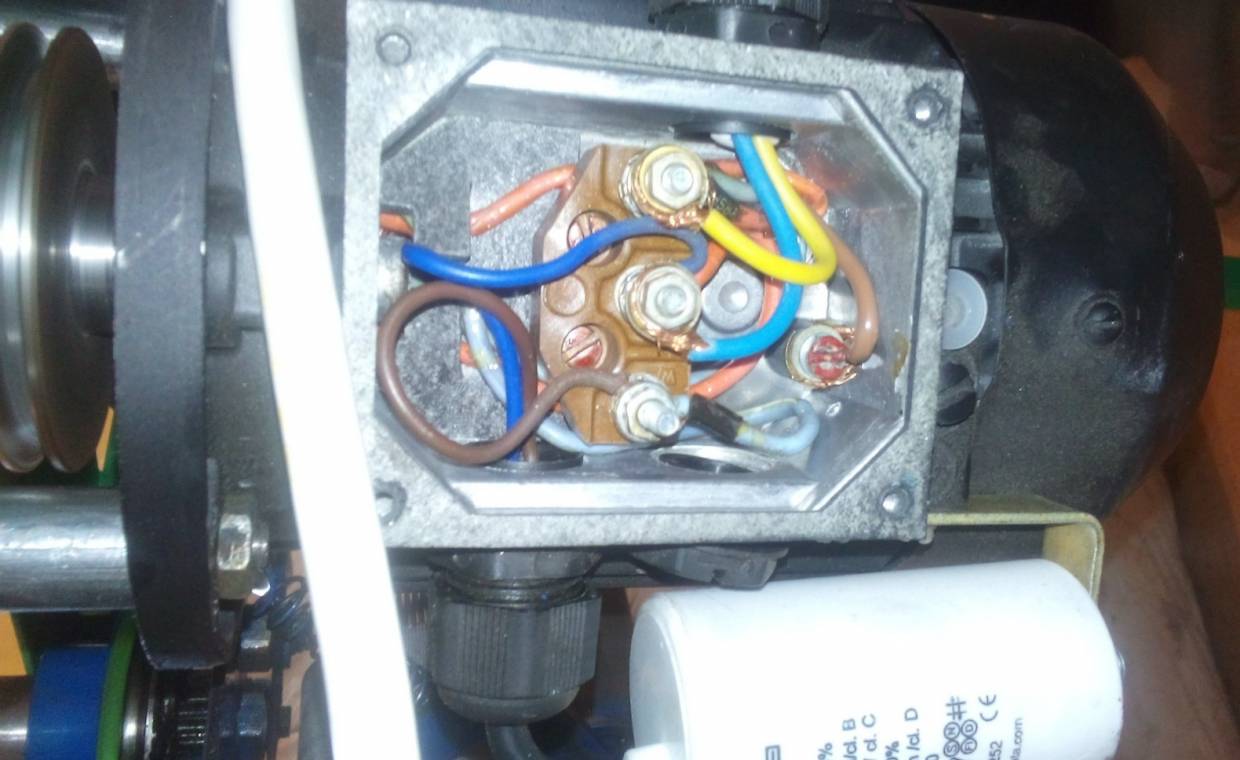 Ток в 732 раза выше при подключении по схеме «звезда».
Ток в 732 раза выше при подключении по схеме «звезда».
Какой двигатель потребляет больше тока звезды или треугольника?
Ответ очень прост! Если двигатель имеет постоянную нагрузку на вал, то, поскольку крутящий момент в треугольнике в три раза больше, чем в схеме звезды, он будет потреблять меньше тока на фазу при работе в треугольнике.
Почему малые двигатели соединены звездой?
В высоковольтном двигателе ток часто невелик, и требуется более высокая степень изоляции двигателя, поэтому изоляция двигателя при соединении звездой лучше и экономичнее.
Почему мы используем стартер DOL?
Пускатели DOL применяются в основном в двигателях, где высокий пусковой ток не вызывает чрезмерного падения напряжения в цепи питания (или где такое высокое падение напряжения допустимо). Пускатели прямого действия обычно используются для запуска небольших водяных насосов, конвейерных лент, вентиляторов и компрессоров.
В чем разница между VFD и DOL стартером?
VFD преобразует сетевое напряжение переменного тока в напряжение постоянного тока, а затем инвертирует его обратно в смоделированное напряжение переменного тока для двигателя. Методы прямого запуска двигателя имеют самые основные возможности запуска двигателя, в то время как частотно-регулируемые приводы имеют управление двигателем на протяжении всего времени запуска, остановки и работы.
Методы прямого запуска двигателя имеют самые основные возможности запуска двигателя, в то время как частотно-регулируемые приводы имеют управление двигателем на протяжении всего времени запуска, остановки и работы.
Какая полная форма стартера DOL?
Прямое включение (DOL) или через пускатель сети подает полное линейное напряжение на клеммы двигателя. Это простейший тип пускателя двигателя. Пускатель двигателя DOL часто содержит защитные устройства (см. Ниже) и, в некоторых случаях, средства контроля состояния.
Можно ли использовать стартер DOL для двигателя 10 л.с.?
Эти блоки управления двигателями особенно подходят для управления наземными и погружными электронасосами.Ассортимент включает панели управления DOL от 5,5 до 70 л.с. и ASD от 10 до 150 л.с. для одного запуска двигателя.
Какие бывают типы стартеров DOL?
Пускатель двигателя с прямым включением (DOL)
- Пускатель двигателя с прямым подключением — квадрат D.
- DOL part — Контактор.
- DOL part — Термореле перегрузки.
- Пускатель прямого включения — электрическая схема.
- DOL — Схема подключения.

Сколько существует типов пускателей двигателей?
Четыре разновидности пускателей двигателей: линейный, реверсивный пускатель, многоскоростной пускатель и пускатель пониженного напряжения.Сетевой пускатель или нереверсивный пускатель полного напряжения (FVNR) является наиболее часто используемым пускателем общего назначения.
Как подключить троллинговый мотор к аккумулятору?
Если вы любите кататься на лодке или часто ходите в воду, высока вероятность, что вам нужно научиться подключать троллинговый двигатель к аккумулятору. Троллинговые моторы известны своими исключительными характеристиками, поскольку они регулируются и помогают лодке маневрировать. В большинстве случаев люди не знают, как подключить провод к батарее, чтобы мотор можно было использовать на лодке, и это приводит к менее увлекательным занятиям на воде.
Для правильного выполнения процедуры вам потребуются некоторые специальные инструменты. Вам понадобится система управления троллинговым двигателем, которая включает в себя дистанционное управление и ручной наполнитель. Вам нужны батареи, выбранные в соответствии с потребностями вашей лодки. Вы можете использовать одну или несколько батарей, подключенных параллельно или последовательно. Для крепления силовых выводов двигателя к аккумуляторной батарее требуются клеммные колодки. В случае соединения батарей более высокого напряжения вам также понадобится перемычка.Для защиты предполагается использовать автоматический выключатель вместе с моторной лодкой, которая помогает быстро отсоединиться от моторной лодки. Мотор малого хода легко снимается с помощью быстросъемной пластины. Вам может потребоваться удлинитель, потому что может быть подключено более одной батареи, а перемычки может быть недостаточно для этого. Вам также понадобятся некоторые провода питания.
 youtube.com/embed/J6NIXuo-TCc» title=»YouTube video player» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/J6NIXuo-TCc» title=»YouTube video player» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/> Как правильно выбрать аккумулятор?
Есть два определенных типа аккумуляторов, которые используются в троллинговых двигателях.Первый — это батарея из абсорбирующего стекломата, широко известная как AGM, а вторая — свинцово-кислотный влажный элемент. Аккумуляторы AGM долговечны и устойчивы к вибрации, что позволяет им работать долгое время. Более того, они работают четыре года, в отличие от обычных батарей, которые умирают через два года. Если вам нужна исключительная производительность, батареи AGM — ваш самый безопасный выбор, однако они очень дороги и могут привести к превышению бюджета.
Свинцово-кислотный влажный элемент приемлем с точки зрения работы двигателя.Он выдерживает давление и дешевле по сравнению с AGM. Однако они не служат долго и могут вызвать утечку.
Они не будут устойчивы к вибрации, а это значит, что потребуется очень серьезное обслуживание.Батарея (или батареи, соединенные последовательно перемычкой) не должна была использоваться ранее. Прежде всего возьмите красный провод, сделанный из свинца, от подвесного мотора и подключите его к положительной клемме аккумуляторной батареи.Затем возьмите черный провод и подключите его к отрицательной клемме аккумулятора. Просто помните, что черный провод подключен к черной клемме, а красный провод подключен к красной клемме. Рекомендуется использовать между ними автоматический выключатель на 50 ампер.
 Они не будут устойчивы к вибрации, а это значит, что потребуется очень серьезное обслуживание.
Они не будут устойчивы к вибрации, а это значит, что потребуется очень серьезное обслуживание. При наличии одной батареи 12 В требуется только этот процесс. Если на двигатель подается напряжение 24 В и в комплект входят две батареи на 12 В, то вы берете черный провод от двигателя и подключаете его к отрицательной клемме первого аккумулятора.Затем возьмите красный провод двигателя и подключите его к положительной клемме второй аккумуляторной батареи. После этого с помощью перемычки соедините положительную клемму первой батареи с отрицательной клеммой второй батареи. Для этого необходимо использовать автоматический выключатель на 40 ампер.
После этого с помощью перемычки соедините положительную клемму первой батареи с отрицательной клеммой второй батареи. Для этого необходимо использовать автоматический выключатель на 40 ампер.
Если двигатель на 36 вольт, вам потребуются три батареи на 12 В. Этот процесс немного сложен, но как только вы его поймете, вы сможете справиться с ним без каких-либо проблем. Подключите черный провод от двигателя к отрицательной клемме первого аккумулятора.Затем подключите красный провод от двигателя к положительной клемме третьей батареи. После этого вам потребуются две перемычки. Подключите один от положительной клеммы первой батареи к отрицательной клемме второй батареи. Другой перемычкой соедините положительную клемму второй батареи с отрицательной клеммой третьей батареи. Наконец-то у вас будет мотор на 36 В.
Топ видео
Что произойдет, если подключить к сети вращающийся асинхронный двигатель?
Все машины переменного тока (синхронные и индукционные) имеют окно возможности для повторного включения. Базовое разрешение для АПВ (также известное как «переключение по шине») либо «быстрое», либо «медленное».
Обычно «быстрое» АПВ происходит в течение нескольких циклов (думаю, меньше 8, а часто меньше 6). С точки зрения фактического истекшего времени, это, безусловно, будет быстрее, чем 0,12 секунды. Если вы пытаетесь сделать это на синхронной машине, она ДОЛЖНА иметь бесщеточное возбуждение, поскольку это может быть сделано только с возбужденным полем ротора.
«Медленные» попытки АПВ возникают после продолжительного периода, когда энергия в системе — и особенно в роторе — значительно упала.(ПРИМЕЧАНИЕ — это МОЖЕТ означать ожидание, пока ротор полностью остановится!)
Основной принцип асинхронного двигателя заключается в том, что ротор вращается за счет взаимодействия магнитного поля, создаваемого в статоре и роторе. Если вы выключите двигатель (обесточив обмотку статора), сердечник статора не будет иметь магнитного поля, управляемого током статора (равным нулю), однако ротор (независимо от того, является ли он коротким или скользящим) все равно будет иметь циркулирующий ток.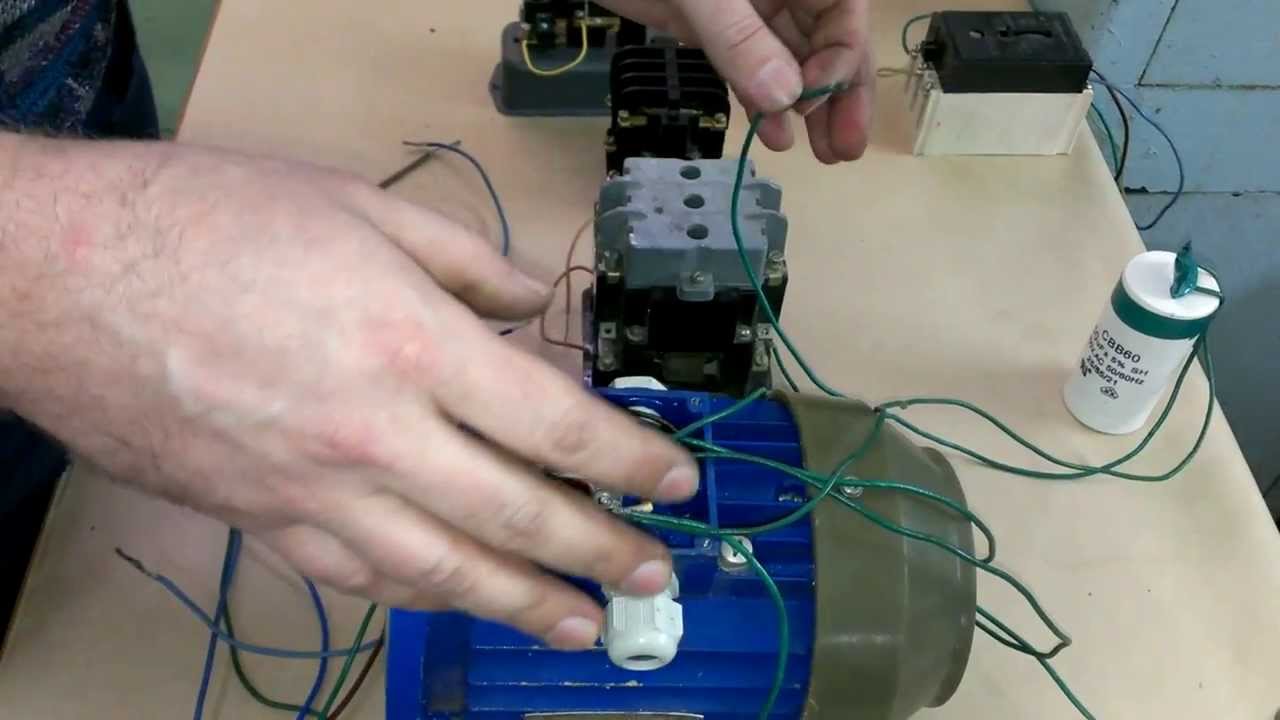 экспоненциально уменьшается на сопротивление цепи.Этот ток действительно создает магнитное поле как в роторе, так и в статоре. Теперь условие повторного замыкания и поведение будут зависеть от фактического взаимодействия между существующей амплитудой магнитного поля и фазовым сдвигом по сравнению с вновь созданной амплитудой поля и фазовым сдвигом.
экспоненциально уменьшается на сопротивление цепи.Этот ток действительно создает магнитное поле как в роторе, так и в статоре. Теперь условие повторного замыкания и поведение будут зависеть от фактического взаимодействия между существующей амплитудой магнитного поля и фазовым сдвигом по сравнению с вновь созданной амплитудой поля и фазовым сдвигом.
Вся история сводится к ситуации, очень похожей на синхронизацию. В правильной фазе пик тока незначителен, в то время как в противофазе ток может быть в n раз выше, чем нормальный пусковой ток.
Эти асинхронные двигатели способны генерировать энергию, сопоставимую с их номинальной мощностью, по крайней мере, мне удалось заставить их генерировать, но это не так просто — токи должны течь все время, люди используют относительно большие (я использовал около 30 мкФ на фазу для двигателя мощностью около 1 кВт) для поддержания протекания этих токов.
При отключении от сети / нагрузки / конденсаторов эти токи больше не протекают, и двигатель останавливает генерацию, и это не так просто (вы должны подключить эти конденсаторы, разогнать двигатель до резонансной скорости и только тогда, когда напряжение станет достаточно высоким, вы можете подключить нагрузку и начать использовать ее в качестве генератора), чтобы она снова сгенерировала.
Можно использовать двигатели в качестве сетевых генераторов, если вращать их со скоростью, превышающей скорость ползуна, но все это не имеет отношения именно к этому случаю. Когда токи прерываются хотя бы на мгновение — асинхронный двигатель больше не генератор.
Если двигатель был подключен к источнику, на несколько циклов будет обратная ЭДС. Если асинхронный двигатель шунтируется конденсатором коррекции коэффициента мощности, обратная ЭДС будет продолжаться более 60 циклов. Если вы подключитесь к источнику с напряжением на выводах асинхронного двигателя, вы увидите высокие токи на короткое время.Эти токи могут повредить обмотку двигателя, поскольку они превышают нормальный бросок тока. Точно так же ведет себя пускатель с открытым переходом звезда-треугольник.
Однако, если двигатель ускоряется почти до полной скорости от внешнего источника, как было указано выше, двигатель достигает своей нормальной рабочей скорости. Скорость скольжения будет определяться нагрузкой.
Перезапустить все еще вращающийся электродвигатель путем прямого подключения к источнику питания возможно, но сначала необходимо учесть некоторые соображения.Во-первых, когда двигатель запитан прямо в сеть (DOL), ему потребуется столько энергии, сколько он может получить, чтобы как можно скорее разогнаться до полной скорости. Поэтому наилучшие результаты будут достигнуты, когда скорость будет максимально приближена к нормальной, а нагрузка будет иметь наименьшую инерцию. Поскольку скорость ниже, а инерция выше, удар от повторного включения двигателя вызовет падение напряжения, потерю крутящего момента, а также нагрузку на ведомые компоненты нагрузки. Система подачи и вращающиеся части должны быть спроектированы так, чтобы выдерживать этот удар, иначе они будут повреждены.
Реакторы или резисторы использовались в прошлом для компенсации кратковременных высоких токов при подключении асинхронного двигателя к линии, которая была ускорена почти до полной или немного превышающей скорость с помощью инвертора, а затем подключена к источнику питания.