Как устроены роботы, обезвреживающие бомбы
Роботы обезвреживают бомбы уже 40 лет. Они ходят туда, куда люди боятся даже смотреть. Среди многих других занятий, обезвреживание бомб и прочих взрывных устройств является одним из самых опасных, где риск смерти подстерегает на каждом шагу. За последние 40 лет к помощи роботов-саперов прибегали сотни, если не тысячи раз.Однако термин «робот-сапер» в некотором роде некорректен, поскольку технически они роботами не являются. В Оксфордском словаре английского языка «робот» означает «машину, способную выполнять сложный порядок действий автоматически». Роботы-саперы не могут самостоятельно принимать решения в зависимости от ситуации. Роботов-саперов было бы правильнее назвать дронами, как часто называют беспилотные аппараты, поскольку они управляются дистанционно человеком издалека. Эти роботы работают в качестве устройства для удаленного присутствия экспертов по обезвреживанию бомб, или «bomb doctors», как их привыкли называть в британской армии.


Источник: http://portaltele.com.ua/news/technology/kak-ustroeny-roboty-obezvrezhivayushhie-bomby.html
Данный материал является частной записью члена сообщества Club.CNews.
Редакция CNews не несет ответственности за его содержание.
робот Spot от Boston Dynamics / Хабр
Spot танцуют, стойко сносят пинки, буксируют грузовики и катают Адама Сэвиджа на рикше. У этих роботов отличный пиар, но что вы на самом деле знаете об их возможностях?
Давайте разберемся, как устроены Spot, как ими управлять, как под них разрабатывать. И главное, зачем серьезным компаниям покупать четвероногих роботов по 75 000 долларов за штуку.
Случайный пиар
Никто в Boston Dynamics не ожидал, что их роботы станут частью массовой культуры. По крайней мере, так говорит Марк Райберт (Marc Raibert) — основатель, председатель совета директоров и бывший генеральный директор компании.
Однажды некто скачал несколько ранних роликов с сайта Boston Dynamics и залил на YouTube. Они привлекли много внимания, и завертелось.
Мы получили положительную реакцию от наших клиентов и спонсоров. После мы решили: «Хорошо, нужно завести свой канал на YouTube».
Сейчас на Boston Dynamics подписано больше полутора миллионов человек. Правда, известность сыграла с компанией злую шутку. Из-за всех этих роликов роботов часто переоценивают.
Разработка Spot
Дизайн добавляет путаницы. Spot напоминает собаку, поэтому люди думают, что он будет вести себя так же. Например, будет поворачиваться, чтобы что-то рассмотреть.
Да, в конструкции Spot есть элементы бионического дизайна, но перед инженерами не было задачи сделать робота похожего на собаку и ведущего себя, как животное. Можно сказать, что его внешность — результат сходящейся эволюции.
Можно сказать, что его внешность — результат сходящейся эволюции.
Для многих робот — просто компьютер, который раздает команды механизмам и получает обратную связь при помощи сенсоров. В реальности, с одной стороны механизмами управляет компьютер, а с другой — действуют гравитация, трение, закон сохранения импульса и вся остальная бессердечная физика. Чтобы робот мог нормально работать за пределами лаборатории, алгоритмы, механика и окружающая среда должны гармонично взаимодействовать.
В Boston Dynamics добиваются этого, постепенно совершенствуя роботов. Инженеры компании собирают прототип, прогоняют его через серии практических тестов, и на основе полученных данных проектируют новую версию.
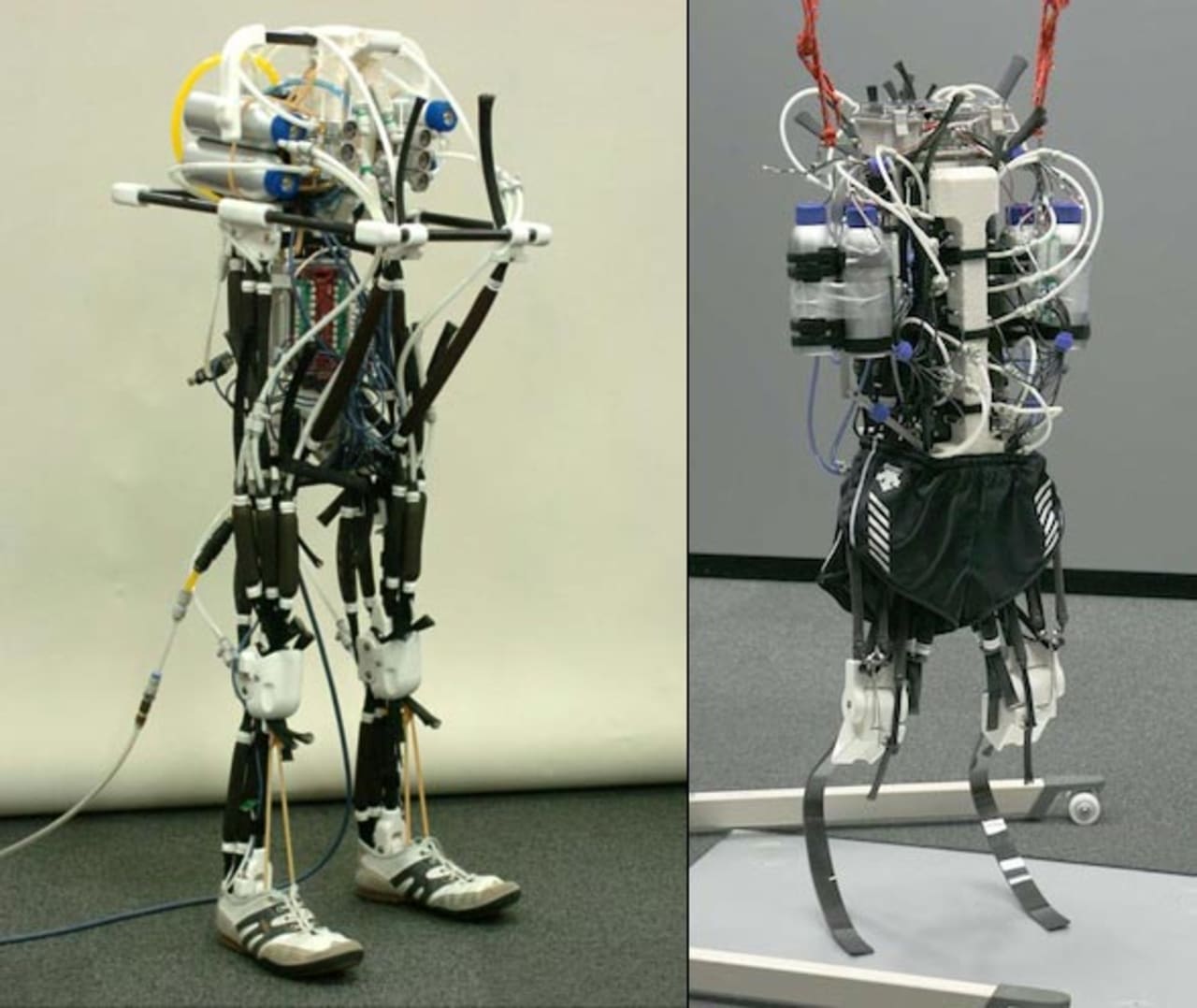
Они начинают с конструкций на базе заводских модулей, и поколение за поколением продвигаются ко все более сложному кастомному дизайну, рассчитанному на 3D-печать.
Слева — классическая конструкция: винты, кабели и разъемы. Справа — усовершенствованная. Она больше похожа на анатомический рисунок. Часть бедра с гидравликой, каркас, приводы и вся остальная машинерия будто образуют единое целое
Часть бедра с гидравликой, каркас, приводы и вся остальная машинерия будто образуют единое целоеТак, за 15 лет брутальный 110 кг BigDog, превратился в Spot — робота, которого многие хотели бы увидеть в будке около своего дома.
Анатомия Spot
Механика
Длина Spot — 110 см, а в холке робот достигает 84 см. Формально у Spot есть перед — там расположены светодиодные индикаторы состояния. Сзади находится набор разъемов. Однако, робот одинаково быстро движется и вперед, и назад. Максимальная скорость достигает 5,76 км/ч — его можно обогнать трусцой.
В лапы встроено 12 электрических приводов — по два в бедренных суставах, и по одному в каждом колене. На конце каждой конечности расположены протекторы, отдаленно напоминающие автомобильные покрышки.
Такая конструкция позволяет Spot двигаться приставным шагом, разворачиваться на месте, приседать, ложиться на землю, уверенно взбираться по склонам с уклоном до 30 градусов, подниматься по лестницам и вставать после падений.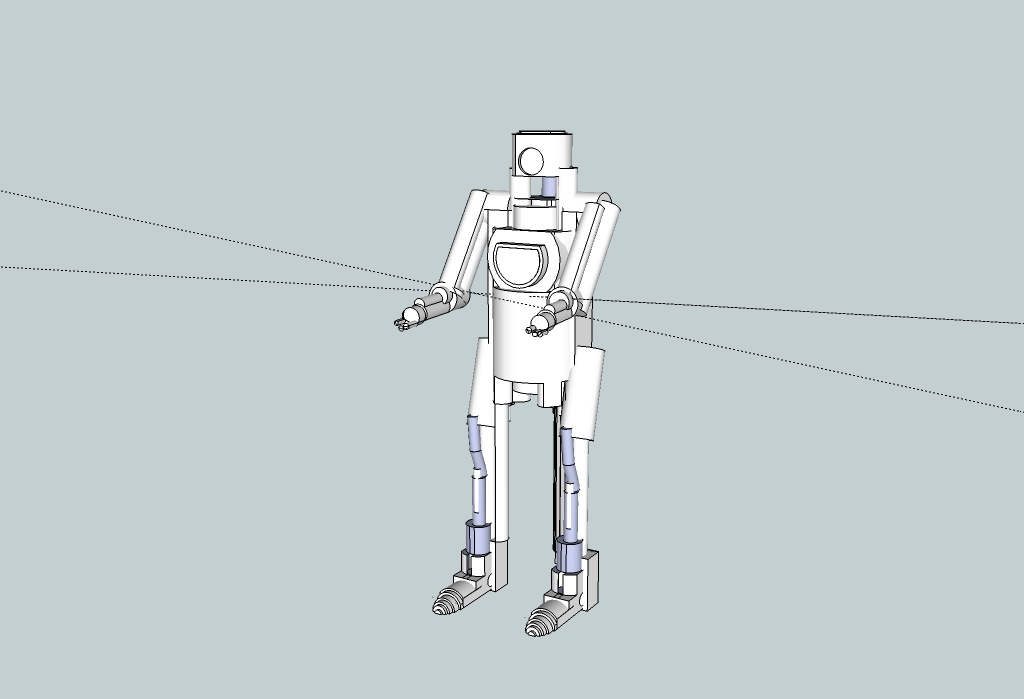
Спецы из iFixit еще не дотянулись до Spot, а Boston Dynamics не спешит делиться коммерческими секретами. Поэтому мы мало знаем о том, как именно этот робот поддерживает равновесие. В своих ранних машинах Boston Dynamics использовала акселерометры, твердотельные гироскопы и гиростабилизаторы. Распределение веса контролировалось при помощи тензодатчиков и датчиков крутящего момента в суставах.
Все вычисления, необходимые для работы Spot, выполняются «на борту», но, опять же, неясно, какая электроника за них отвечает. Мне попадались слухи о двух процессорах Intel Core I7, но подтвердить их не удалось.
Корпус
Spot имеет рейтинг IP54. Защита от воды хуже, чем у iPhone, но зато не разобьется при паденииРассмотреть начинку робота мешает двухслойный защитный корпус. Снаружи — покрытие из поликарбоната, внутренний слой сделан из пенопласта. Такая конструкция смягчает удары о препятствия.
Spot не боится дождя, строительной пыли и может работать при температуре от -20С до 45С.
Батарея
К каждому Spot прилагается пара сменных литий-ионных аккумуляторов емкостью 600 Вт-ч каждый и 400 Вт зарядное устройство. На зарядку аккумулятора требуется 2 часа. Батареи вставляются в брюхо робота и обеспечивает 90 минут активной работы или около 4 часов сидя в режиме ожидания.
Пара батарей и зарядное устройство (выход: 35-58,6 В постоянного тока, 7,2 А Макс.)В документации к Spot упоминается, что при некоторых движениях приводы не тратят, а генерируют ток. В результате, напряжение на шине робота может превышать напряжение батареи, но вряд ли это заметно продлевает время работы.
Сенсоры и восприятие пространства
Spot видит все вокруг, но недалеко. Инженеры снабдили его пятью стереокамерами, обеспечивающими 360-градусный обзор. Сенсоры выдают черно-белую картинку и позволяют построить карту глубины, но дальность обзора составляет всего 4 метра.
Чтобы ориентироваться на местности и избегать препятствий, Spot использует не только камеры, но и одометрию — данные о движении приводов. Они формируют машинный аналог человеческой проприоцепции — ощущения положения тела в пространстве. При помощи камер и одометрии Spot поддерживает и обновляет модель, которая описывает позу робота и положение относительно других объектов.
Они формируют машинный аналог человеческой проприоцепции — ощущения положения тела в пространстве. При помощи камер и одометрии Spot поддерживает и обновляет модель, которая описывает позу робота и положение относительно других объектов.
Связь
Все приложения связываются с компьютером Spot через сетевое соединение по протоколу TLS 1.2 или 1.3. Хотя у робота есть разъем RJ-45, для управления обычно используют встроенный модуль Wi-Fi 802.11. Spot может подключаться к существующим Wi-Fi сетям или сам выступать в качестве точки доступа.
При прямом подключении к роботу можно рассчитывать на максимальную дальность управления в 50 метров. Чтобы увеличить это расстояние, Boston Dynamics рекомендует подключать к Spot LTE-модем.
Управление Spot
В YouTube-роликах Spot кажутся довольно самостоятельными, но еще в прошлом году это было не так. Когда их начали рассылать заказчикам, собаки Boston Dynamics не могли ориентироваться в пространстве без помощи оператора.
Контроллер
Обычно для управления Spot используют контроллер с незамысловатым названием Spot Explorer. Это 7-дюймовый планшет, который выглядит как помесь Nintendo Switch с геймпадом Xbox.
Boston Dynamics в этом никогда не признается, но его можно купить на Aliexpress под названием JXD S192K: разрешение дисплея — 1920×1200, процессор Rockchip 1,8 ГГц, 4 ГБ оперативной, 64 ГБ встроенной памяти и аккумулятор на 10 000 мАч.
В магазины этот планшет поступает с Android 5.1 на борту, но версия Boston Dynamics обновлена до Android 8.1 и заполнена кастомным софтом для управления роботом.
Чтобы заставить Spot двигаться, достаточно пары стиков по бокам от экрана планшета. Левый отвечает за движение вперед-назад и вправо-влево, а правый управляет вращением робота вокруг своей оси. Если прикоснуться к экрану, робот переместится к выбранной точке, совсем как в Google Street View.
Врожденный интеллект
Чтобы освоиться с управлением, нужны считаные минуты.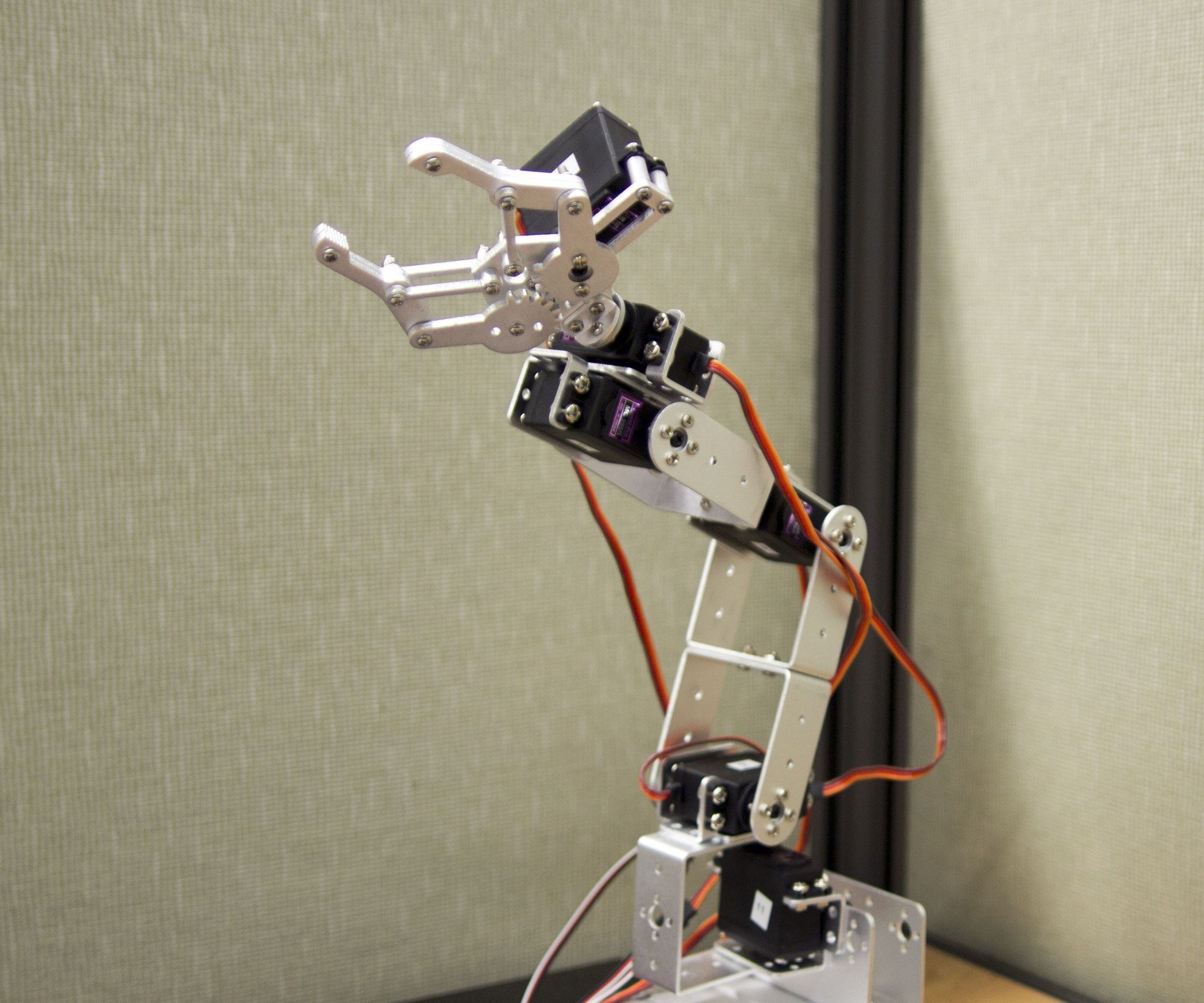 Дело в том, что большую часть работы Spot берет на себя. Робот самостоятельно избегает столкновений, переступает через препятствия и адаптируется к неровностям местности.
Дело в том, что большую часть работы Spot берет на себя. Робот самостоятельно избегает столкновений, переступает через препятствия и адаптируется к неровностям местности.
Это работает удивительно хорошо, но не идеально. Spot все еще теряет равновесие на скользких поверхностях и спотыкается о кабели и веревки. Он может наступать на банки с краской, ведра и другие предметы ниже 30 см, плохо распознает зеркальные и очень яркие препятствия. В инструкции отдельно подчеркивается, что Spot может врезаться в стеклянные двери. А еще, если придет робоапокалипсис, вы можете попробовать спастись в высокой траве.
Autowalk
Spot может запомнить дорогу и самостоятельно пройти по сохраненному маршруту. Эта функция делает из игрушки с радиоуправлением инструмент для автоматизации повторяющихся задач.
Сначала Spot нужно вывести на прогулку — включить запись и провести по маршруту вручную.
В режиме Autowalk робот пройдет тот же путь самостоятельно, обходя появившиеся препятствия и повторяя все действия, которые совершал раньше. Например, он будет фотографировать в одних и тех же точках маршрута. Чуть позже вы поймете, зачем это нужно.
Например, он будет фотографировать в одних и тех же точках маршрута. Чуть позже вы поймете, зачем это нужно.
Чтобы Spot понимал где находится и куда движется, ему нужны визуальные ориентиры — путевые точки. Обычно робот отмечает их с интервалом в 2 метра. Это места с углами, мебелью, оборудованием и другими подобными особенностями. Поэтому Spot хорошо ориентируется в насыщенной среде, но может потеряться в трех соснах в длинном белом коридоре.
В таких местах Boston Dynamics рекомендует развешивать фидуциары — картинки, похожие на QR-коды. Они служат искусственными ориентирами. Как минимум один такой тег обязательно нужен, чтобы отметить начало пути.
Записи маршрутов хранятся в Spot Explorer. Их может повторить любой робот, к которому подключен контроллер.
Продвинутая навигация
Весной 2020 года Boston Dynamics выпустила обновление Spot 2.0. Теперь под руководством оператора Spot может построить подробную карту местности. Затем нужно выбрать на карте те места, которые должен посетить робот, и действия, которые он должен совершить. Spot самостоятельно построит кратчайший маршрут, пройдет по нему и выполнит свою задачу.
Spot самостоятельно построит кратчайший маршрут, пройдет по нему и выполнит свою задачу.
Полезная нагрузка
Чтобы заставить Spot сделать что-то полезное, его нужно хорошенько навьючить.
На спине робота расположена пара алюминиевых рельсов, отдаленно напоминающих автомобильный багажник. К ним можно прикрепить до 14 кг. Это не мертвый груз, а функциональные модули, которые подключаются к роботу через пару портов DB25. Разъемы обеспечивают питание (до 150 Вт на порт) и передачу информации.
Spot понимает, какой модуль к нему подключен, учитывает вес и габариты груза при ходьбе. Цель Boston Dynamics — превратить Spot в «мобильную платформу», так что компания уже разработала набор аксессуаров. Они продаются по негуманным ценам на официальном сайте компании.
Spot CAM и CAM+
Основной недостаток спот — близорукость, и Boston Dynamics предлагает несколько способов его исправить.
Прежде всего, это Spot Cam — панорамная камера из пяти сенсоров Sony IMX290. Их дополняет кольцо из ярких светодиодов, пара динамиков и микрофоны для двусторонней связи. Spot CAM+ — то же самое, плюс управляемая pan-tilt-zoom-камера со скромным разрешением 2 МП и нескромным 30-кратным оптическим зумом.
Их дополняет кольцо из ярких светодиодов, пара динамиков и микрофоны для двусторонней связи. Spot CAM+ — то же самое, плюс управляемая pan-tilt-zoom-камера со скромным разрешением 2 МП и нескромным 30-кратным оптическим зумом.
LIDAR и Faro Trek
LIDAR позволяет Spot уверенно ориентироваться на больших открытых пространствах и картировать местность.
Фактически Boston Dynamics перепродает лидар Velodyne VLP-16, который сканирует объекты в радиусе 100 метров с точностью до 3 см. Кроме того, компания FARO уже выпустила для Spot собственное решение для трехмерного сканирования на базе лазерного сканера FARO FocusS.
Spot CORE и Core AI
Чтобы обрабатывать данные с лидара в реальном времени, Spot нужна дополнительная вычислительная мощность.
CORE — обычный компьютер под управлением Ubuntu Desktop 18.04 LTS в компактном исполнении. Внутри находится процессор Intel Core i5 восьмого поколения, 16 ГБ оперативной памяти DDR4 и SSD диск на 512 ГБ. В отличие от компьютеров, управляющих Spot, эта система открыта для разработчиков.
В отличие от компьютеров, управляющих Spot, эта система открыта для разработчиков.
Для машинного обучения предусмотрен отдельный модуль — Core AI. Это CPU Intel Xeon E3-1515M V5, 32 ГБ оперативной памяти, 480 ГБ SSD и видеокарта Nvidia Quatro P5000 в корпусе с защитой IP67 и возможностью работы от -20 до 45C.
Spot ARM
Самый интересный официальный аксессуар для Spot — роборука. Spot Arm весит 8 кг и может поднять до 4 кг.
Впервые ее показали еще несколько лет назад, но обещают выпустить в продажу лишь к началу 2021 года. Ведь мало сконструировать манипулятор, нужно научить Spot им пользоваться.
У Spot Arm, как и у всего робота, должен быть «врожденный интеллект». Манипулятор должен захватывать предметы автоматически, повинуясь простым командам. Кроме того, Spot Arm должен слаженно работать с остальным телом Spot. Это хорошо видно, когда Spot открывает дверь.
Робот определяет местоположение ручки, выбирает угол захвата, позиционирует манипулятор, решает, толкать или тянуть, а затем тянет за ручку и маневрирует всем телом.
Научить робота действовать также в различных ситуациях — непростая задача. Сейчас инженеры по всей Америке заставляют Spot собирать разные предметы с пола своих квартир. Boston Dynamics отправила сотрудников на удаленку вместе с 71 робособакой. Но, несмотря на это, в Boston Dynamics подчеркивают: Spot не подходит, чтобы убираться на кухне или бегать во дворе дома.
Не для дома
Spot — промышленный робот, а не домашний любимец. Да, он тише, чем прародитель — дизельный BigDog, но все еще здорово шумит, особенно в маленькой квартире.
«Spot громкий», — рассказал в разговоре с The Verge Сэм Сейферт (Sam Seifert), один из инженеров Boston Dynamics, — «Это не так заметно в промышленных условиях или больших помещениях, но в маленьких замкнутых пространствах, топот Spot резонирует».
На спине этого песика закреплен лазерный сканер FAROГлавная причина держаться от Spot на расстоянии — он не соответствует трем законам робототехники, ни буквально ни метафорически.
Робот не может предсказывать траектории движущихся объектов, и у него нет специальных навыков для контактов с людьми. Кроме того, его конструкция довольно опасна. Шарниры могут с легкостью прищемить пальцы. Инструкция не скупится на кровавые подробности.
На такой случай предусмотрен аварийный выключатель в приложении и на шасси робота, и все же, Spot не стоит использовать в тесном контакте с людьми, тем более дома.
Применение Spot
Как и большинство современных роботов, Spot лучше всего подходит для Three Ds: dirty, dull, and dangerous — грязной, скучной и опасной работы. Но даже инженеры Boston Dynamics поначалу не знали, где именно робот окажется наиболее полезен.
Осенью 2019 года Boston Dynamics отправила 150 Spot различным компаниям и исследовательским центрам для тестирования. Роботов буквально отдавали со словами: «придумайте им наилучшее применение». И применения нашлись.
Строительство и инженерия
Spot оказались полезны на стройплощадках. Там одновременно работает много людей разных профессий, и их усилия сложно координировать. Каким бы придирчивым ни было руководство, рано или поздно кто-то отклоняется от чертежей. Тогда приходится сносить уже готовую стену, а, в худшем случае, реконструировать целое здание.
Там одновременно работает много людей разных профессий, и их усилия сложно координировать. Каким бы придирчивым ни было руководство, рано или поздно кто-то отклоняется от чертежей. Тогда приходится сносить уже готовую стену, а, в худшем случае, реконструировать целое здание.
В 21 веке вместо бумажных планов в строительстве используют BIM (Building Information Modeling). Это сложная штука, но сейчас достаточно сказать, что BIM выглядит, как подробная трехмерная модель здания со всеми коммуникациями.
Во время строительства специально обученный сотрудник обходит строительную площадку с фотокамерой в руках, делает сотни снимков в заранее выбранных точках, сгружает их на компьютер и сравнивает с ранними снимками и трехмерным планом. Через неделю — повторяет все заново. Ну вы поняли… К тому же, сделанные человеком фотографии отличаются по ракурсу, и это затрудняет сверку.
Spot справляется с этой задачей лучше людей. Ему не надоедает ходить по одному и тому же маршруту 24 на 7, и он может делать больше снимков с большей точностью.
Так, чтобы отслеживать ход строительства на площадке Pomerleau, пара роботов Spot еженедельно делала почти 5 000 фотографий, обходя территорию более 45 000 квадратных метров.
Но дело не только в фотографиях. С лидаром или лазерным сканером на спине Spot может собирать данные для создания новых и обновления старых информационных моделей. Этим собаки Boston Dynamics занимаются в Мичигане.
Там расположены заводы Ford, которые модернизировали и перестраивали на протяжении десятков лет. Теперь они даже приблизительно не похожи на оригинальные инженерные планы. Чтобы полностью переоборудовать производство, Ford нужно заново перенести его «на бумагу». По словам Марка Годериса (Mark Goderis), менеджера Ford, люди сканировали бы завод до двух недель, а их работа стоила бы почти 300 000 долларов. Spot позволил справиться в два раза быстрее.
Энергетический сектор
Другая область, в которой роботы показали себя очень хорошо — мониторинг оборудования в опасных условиях, например, в море. Так, AkerBP отвезла Spot на судно FPSO в Норвегию. Там робособака будет снимать показания с оборудования и искать утечки нефти.
Меню управления AutowalkЕще один пример — морские ветряные электростанции. Ветряки генерируют переменный ток. Чтобы снизить потери при передаче, его преобразуют в постоянный на подстанции, расположенной прямо в море, в сотнях километрах от берега. И все было бы отлично, но подстанции требуют регулярных осмотров и обслуживания.
Суровые условия и сложное оборудование делают такую работу очень опасной. Смертность среди морских рабочих в США в семь раз выше, чем на среднем рабочем месте. К тому же, во время осмотров станции приходится отключать. Это означает колоссальные потери — примерно 20 мегаватт-часов электроэнергии на каждую турбину за день простоя.
В этом контексте 75 000 долларов за робота — не такая уж высокая цена. Тем более, Spot может приближаться к работающему оборудованию. С установленным на спину тепловизором он может обнаруживать проблемы, которые пропустят техники, например, перегрев трансформаторов.
Развлечения
Четвероногих роботов, как и квадрокоптеры, можно использовать в различных шоу.
Как вы можете убедиться, Spot неплохо танцуют. Осталось только пошить красочный костюм — и в цирк. Cirque du Soleil всерьез рассматривал Spot как артиста, но после отмены представлений у них вряд ли остались деньги на роботов.
Медицина
Зато с началом пандемии роботами Spot стали интересоваться медики. Их сразу же стали применять для дистанционных консультаций, но в Массачусетский технологический институт (MIT) и Гарвардская медицинская школа пошли дальше и решили приспособить Spot и для удаленной диагностики.
Исследователи установили на Spot четыре новых камеры — инфракрасную и три монохромных, которые фильтруют различные длины световых волн: 670, 810 и 880 нанометров. Инфракрасная камера позволяет измерять температуру и частоту дыхания пациента, а монохромные фиксируют изменения цвета кожи и, таким образом, определяют насыщенность крови кислородом.
Близкое знакомство
Теперь, когда вы представляете, зачем нужен Spot, самое время познакомится с роботом поближе. Для этого даже необязательно выкладывать 75 000 долларов.
Spot на дистанционном управлении
Formant, стартап из Сан-Франциско, создает системы дистанционного управления роботами и предлагает поуправлять Spot дистанционно из любой точки мира.
Для того чтобы прогуляться по парку Золотые Ворота или по местному пляжу даже не нужен контроллер, только компьютер, надежное подключение к интернету и немного везения. Компания столкнулась с наплывом желающих, но все еще принимает заявки на тестирование.
Разработка и открытый SDK
Boston Dynamics выпустила для Spot комплект разработчика. Он доступен на Github и снабжен подробным руководством.
SDK позволяет создавать приложения для управления роботом, получать информацию с датчиков для анализа и подключать к Spot новые модули полезной нагрузки. Чтобы сделать разработку проще и доступнее, в качестве основного языка для API Boston Dynamics выбрала Python.
Компания предлагает разработчикам арендовать роботов, но существуют и симуляции. Виртуальные модели Spot доступны в Webots и, с недавних пор, в Gazebo. Они не идеальны, зато бесплатны и позволяют вволю поэкспериментировать.
Spot в симуляторе WebotsКрупные компании уже запустили разработку приложений для Spot. Американская HoloBuilder выпустила приложение для навигации по строительным площадкам, а Rocos представила облачную платформу для управления целым парком роботов.
Что дальше
Сейчас в мире работает больше двух сотен Spot. За 2020 год Boston Dynamics рассчитывала собрать еще тысячу роботов. Пандемия нарушила график, но производство продолжается. Так, на четырех механических лапах в нашу реальность крадется настоящее будущее. Вполне возможно, что навыки разработки под Spot вскоре окажутся чертовски востребованы на практике.
P.S. Если вам понравилась эта статья и хочется еще, ищите в моем блоге по адресу santry.ru и в телеграм-канале GeeksNote.
P.P.S. @AiratGl написал хорошее дополнение к этой статье: Как работает Spot от Boston Dynamics? Возможный ответ. Там много подробностей об алгоритмах поддержания равновесия на примере роботов Robotic systems lab.
Как работает и устроен робот-пылесос?
Всё еще сомневаетесь в эффективности роботов-пылесосов? Узнайте, как устроен робот-пылесос и какие умные технологии используются в современных гаджетах для уборки! С роботом-пылесосом можно убирать, находясь в отпуске, а мыть полы – лежа на диване. Хватит тратить время на беготню по комнатам с ручным пылесосом. Разобраться с особенностями работы роботов-пылесосов, режимами уборки и преимуществами умных помощников поможет статья.
Умный помощник из будущего – кто изобрел робот-пылесос?
Сегодня практически каждый желающий может позволить себе жить проще использовать достижения умных технологий каждый день. В 1956 году робот-пылесос можно было встретить разве что на страницах фантастических романов (произведение Роберта Хайнлайна «Дверь в лето» считается первым, где упоминается данный вид гаджета) или чуть позже в книжках о приключениях Незнайки. А сегодня достаточно зайти в любой магазин электроники — умных роботов целые полки на любой вкус и цвет. По данным Википедии считается, что первым кто изобрел робот-пылесос, который официально представили на рынке, был американец Джо Джоун из компании iRobot. С момента появления его робот-пылесоса Roomba в 2002 году официально начался век существования и развития умных помощников по хозяйству.
Как устроен робот-пылесос?
Интересно: какие товары Ecovacs одержали победу на международной выставке техники Red Dot Awards
Чаще всего корпус девайса круглый до 40 см в диаметре, высотой от 7 см и выше, в зависимости от модели (пылесосы из серии Slim обладают ультратонким корпусом, чтобы убирать под низкой мебелью, куда обычный пылесос никогда не доберется). Вверху находится кнопка включения – при ее нажатии активируется автоматический режим уборки. Внутри – мотор, аккумулятор и контейнер, куда пылесос собирает пыль. Передняя часть корпуса оборудована бампером с эффектом амортизации для безопасного контакта с мебелью и предметами интерьера. Кроме того, все роботы DEEBOT оборудованы датчиками антистолкновения и антипадения (робот заранее идентифицирует препятствие на пути и снижает скорость, а также чувствует перепады высоты и не пересекает безопасную границу во время уборки возле ступенек).
Читайте также о линейке роботов с технологией влажной уборки OZMO
Снизу у робота находятся:
- Две боковые щетки для сметания пыли
- Основная V-образная щетка/насадка прямого всасывания
- Колеса
- Крепления для микрофибры (в моделях с влажной уборкой)
- Микрофибра
Большая часть современных роботов-пылесосов могут работать в двух режимах: сухая и влажная очистка. То есть умный помощник не только очистит полы от шерсти и пыли, но и освежит все напольные покрытия. Без ведер, швабр, грязных тряпок и луж на паркете. Технология подачи воды на микрофибру позволяет расходовать ее экономно и при этом не оставлять разводов. Все новые роботы DEEBOT с функцией влажной уборки оборудованы обновленной технологией Smart OZMO, которая делает мытье полов еще проще.
Смарт- навигация и управление
Когда активируется процесс уборки девайс предварительно сканирует помещение, строит карту 3-D карту дома ( технология Smart NAVI) и начинает двигаться в соответствии с оптимальным маршрутом. В более ранних моделях, где отсутствует функция сканирования помещения лазером использована технология Smart MOVE, которая позволяет роботу передвигаться без пропусков и делать очистку полов качественно. Одной зарядки аккумулятора в среднем хватает на 110 минут работы. Если территория большая, то гаджет без посторонней помощи идентифицирует необходимость вернуться на док-станцию. Когда робот пылесос сам заканчивает уборку, он не забывает о том, где остановился и продолжает с той же точки после восстановления ресурсов батареи. В зависимости от необходимости можно менять насадки всасывания: с устранением шерсти домашних идеально справляется насадка прямого всасывания, так волосы не наматываются на щетку и не спутываются. Пыль и грязь собирается в контейнере, который периодически нужно очищать. Во время уборки пылесос как бы повторяет типичные человеческие телодвижения (по технологии Smart Motion) и проходит по одному участку несколько раз, чтобы не оставить ни одной пылинки.
Детальнее о том, как робот-пылесос ориентируется в пространстве
Управлять девайсом можно с помощью кнопки на корпусе, дистанционного пульта (в некоторых моделях) и через приложение на смартфоне. Кроме стандартного автоматического режима, есть ряд дополнительных функций, которые значительно облегчают жизнь.
Только представьте, на улице сырая погода, к вам пришли гости и наследили в прихожей – теперь остатки земли и песка быстро разнесутся по всему дому, если ничего не предпринять. Вместо того, чтобы идти на балкон за веником и подметать, либо доставать из шкафа пылесос, включать его в розетку и вручную ликвидировать последствия, вы можете расслабиться за чашечкой кофе, нажать пару кнопок на смартфоне и робот-пылесос за несколько минут в локальном режиме удалит все загрязнения. Вам даже вставать не придется! Удобно же.
Основные режимы умной уборки:
- Автоматический (при его выборе робот отправляется убирать всю территорию квартиры от и до)
- Локальная очистка ( при необходимости прибраться в определенном месте: только в кухне или на террасе)
- По периметру (гаджет пройдется только вдоль стен и по углам, где больше всего оседает пыль)
- Режим “МАX” (двойное усиление силы всасывания при сильных загрязнениях).
Робота можно легко настроить под себя, установить уборку по расписанию, отметить виртуальные стены (территории которые робот будет обходить стороной) и даже делать уборку удаленно! Да-да, хоть прямо лежа на пляже в отпуске – если хотите вернуться в чистую и не запыленную квартиру, с роботом-пылесосом этот вопрос решается на раз два. Почти во всех базовых роботах-пылесосах DEEBOT уже доступно голосовое управление (пылесос в несколько шагов коннектится с колонками Alexa или Google Home).
Уборка происходит без участия проводов. Робот не требует контроля за уровнем заряда аккумулятора. Часто у пользователей возникает вопрос, можно ли робот-пылесос все время ставить на базу. Да, можно, но в этом нет необходимости, поскольку после каждого цикла уборки он сам автоматически возвращается на зарядную станцию.
Современные роботы-пылесосы устроены максимально понятно и просто – с управлением справится даже ребенок! Такой помощник станет незаменимым в каждом доме, особенно у владельцев домашних животных. С каждым годом ассортимент умных помощников расширяется, а функционал совершенствуется. В каталоге Ecovacs Robotics вы можете без проблем подобрать девайс, который подойдет вам по функционалу и ценовой категории.
как устроены автомобильные коробки передач — Mafin Media
Ко всем статьямРазобравшись с устройством двигателя, можно смело переходить к его «паре». Ведь двигатель создает мощность, но именно через коробку передач эта мощность начинает путь к колесам авто. Об основных типах «коробок» и их устройстве — в материале Mafin Media.
Различают по ступеням. А точнее — по их наличию
Любая КПП (коробка переключения передач) — это трансмиссия (от англ. transmission — передача), то есть механизм, преобразующий крутящий момент таким образом, чтобы в конечном счете вращать колеса автомобиля. Крутящий момент простыми словами — сила, с которой вращается коленвал двигателя.
Вопреки распространенному суждению, коробки переключения передач делятся не на «механику» и «автомат» (что отчасти верно, но весьма условно), а на ступенчатые и бесступенчатые. Самые популярные как раз ступенчатые: это и механическая КПП, и гидромеханический автомат, и «робот», чаще всего устанавливаемые на легковые авто. Также известны, но менее популярны бесступенчатые вариаторы, знакомые любителям скутеров и квадроциклов.
Механическая коробка передач (MT/МКПП)
Самый простой и бюджетный тип трансмиссионного устройства — механическая коробка — представляет из себя набор валов (продолговатых металлических цилиндров или трубок) с нанизанными на них шестернями. Шестерня — это зубчатое колесо, передающее движение. В каждой «механике» (прозванной так за рычаг коробки и педаль сцепления, которыми нужно орудовать самостоятельно, совершая механические движения) есть несколько разных шестеренок. Именно они и есть та самая передача, которая транслирует крутящий момент с двигателя на колеса.
Соотношение разных шестерен на разных валах позволяет выбирать разные скорости, причем не только фигурально («передача» и «скорость» — синонимы), но и буквально: каждая передача рассчитана на движение в определенном скоростном диапазоне. Проще говоря, гражданскому авто на «первой» до 100 км/ч не разогнаться.
Для того чтобы передачу можно было сменить, используется сцепление — «головная боль» начинающих водителей. Двигатель и коробка соединяются диском сцепления, который получает мощность от маховика двигателя и передает ее на коробку передач. Диски необходимо соединять и разъединять вручную — а чаще «вножную». Когда водитель нажимает на педаль, он преодолевает сопротивление пружины «корзины» сцепления, отвечающей за соединение и разъединение маховика и диска сцепления.
Гидромеханический автомат (AT/АКПП)
Еще лет 30 назад автомобиль с двумя педалями вместо трех был заветной мечтой многих горожан. Гидромеханический автомат подразумевает отсутствие жесткого сцепления между коробкой и двигателем. Появились такие коробки передач позже ручных собратьев: ближе к середине XX века своего первенца представила General Motors.
Гидромеханической трансмиссию называют потому, что переключение передач происходит за счет течения рабочей жидкости внутри механизма. За это отвечает гидротрансформатор — в просторечии «бублик».
Он соединен с двигателем и содержит два лопастных колеса. Благодаря движению через них масла лопастные колеса передают мощность двигателя в АКПП. Поскольку гидротрансформатор забирает часть мощности мотора для раскрутки лопастных колес, динамика и экономичность падают. Однако многие предпочтут потерять пару литров и секунд, но не утомляться ручными переключениями. Первым серийным авто с относительно надежной и долговечной АКПП считается Oldsmobile Series 60 — автомат как опция стал доступен для авто с 1940 модельного года.
Робот (РКПП)
Роботизированная коробка передач названа так потому, что представляет собой электронно управляемую МКПП, где комплекс механизмов и процессоров, которые условно можно назвать роботом, выполняет за водителя работу по переключению. Эти коробки появились лишь в конце XX века.
Первоначально РКПП имели одно сцепление, как и обычная «механика», были дешевле традиционного автомата, обеспечивали меньшую потерю мощности и ставились на машины попроще, например Ford Fusion, Peugeot 107, Opel Corsa и т. д. Переключения выполняли специальные механизмы — сервоприводы. Жесткие, рваные и медленные переключения вкупе с быстрым износом сцепления свели их популярность на нет и передали планку современным собратьям — роботам с двумя сцеплениями.
Большинство из них известно поименно: это Direct Shift Gearbox от VAG (Volkswagen Audi Group), Dual Clutch Transmission от Hyundai/Kia, PowerShift от Ford и т. д. Их главная особенность — наличие двух независимых сцеплений: пока одна передача ведет автомобиль, другая уже включена и ожидает своего соединения с мотором. Это существенно усложняет конструкцию узла, но позволяет избегать задержек и рывков при переключении. Более того, робот с двумя сцеплениями (а иногда даже и с одним) по способности экономить топливо легко потягается с традиционной механикой!
Бесступенчатые трансмиссии (CVT)
Наиболее популярная бесступенчатая трансмиссия в автомобилестроении — вариатор, или CVT (Continuously Variable Transmission — в пер. с англ. «постоянно изменяющаяся передача»). В отличие от коробок, рассмотренных ранее, фиксированных передач у вариатора нет. Для транслирования мощности от мотора к колесам используется ремень (или цепь), который вращается между двумя шкивами, то есть колесами с выемками-желобами, предназначенными для «надевания» этого ремня. Один из шкивов приводится в движение мотором и потому называется ведущим, а другой — ведомым.
В зависимости от скорости диаметр шкивов меняется и передаточные числа меняются планомерно, без переключений, свойственных ступенчатым коробкам:
Первым серийным автомобилем с вариатором считается DAF 600, которому недавно исполнилось 60 лет.
Как устроен промышленный робот? Краткий гид по структуре и движениям робота
Содержание:
- Роботы и человек. Так ли они отличаются?
- Сравнение робота и человека
- Что нужно для движений робота? Структура робота
- Звенья
- Редукторы
- Моторы
- Энкодер
- Трансмиссия, ременная передача
- Инструмент робота (EOAT)
- Мозг промышленного робота — контроллер
- Заключение
1. Роботы и человек. Так ли они отличаются?
Несмотря на кажущееся различие человека и промышленного робота, у них есть немало общего. Первое очевидное сходство – это суставы, места соединений костей человека и звеньев у робота, которые придают им подвижность. В основе промышленного робота лежит человеческая рука. Посмотрите на нее: кости и суставы в плече, локте и запястье, благодаря которым рука может свободно сгибаться и двигаться. По этому же принципу работает и робот, только вместо костей — звенья. Кроме того человека и робота объединяет и принцип передачи энергии звеньев к суставам для их движения.
Плечевой и локтевой суставы, кости – это звенья.
Роботы условно подразделяются на два типа в зависимости от расположения звеньев: 1) последовательно соединенные звенья и 2) независимые, параллельно соединенные звенья. Примером последовательного соединения (сочленения) является человеческая рука, поскольку ее суставы и звенья — плечо, предплечье и кисть — соединены последовательно друг за другом плечевым, локтевым и запястным суставами.
Существуют и более расширенные классификации промышленных роботов, которые рассматривают типы соединения и движение звеньев. Более подробно с видами промышленных роботов можно познакомиться в нашей статье
Какими бывают промышленные роботы? Шесть основных типов.
Рассмотрим принципы движения и внутреннюю структуру промышленных роботов.
2. Сравнение движения робота и человека
Рассмотрим механику движений робота шарнирного типа с последовательным соединением звеньев, который конструктивно схож с рукой человека.
Промышленный вертикальный шарнирный робот с последовательным соединением звеньев содержит, как правило, 6 суставов (осей).
На следующем изображении наглядно показано сравнение движений робота и человека.
Оси с 1 по 3 — это туловище и рука человека, а с 4 по 6 оси — запястье и кисть. Первые три оси перемещают кисть в пространстве, а следующие три оси двигают ей. Шестиосевая конструкция дает роботам свободу движения, даже большую, чем человеческой руке.
Предлагаем наглядно это посмотреть на видео.
3. Что нужно для движений робота? Структура робота
Далее мы рассмотрим внутреннее строение промышленного робота.
На рисунке ниже показана схема универсального шарнирного робота Kawasaki серии R малой и средней грузоподъёмности. Роботы серии R применяются для широкого спектра задач, от сборки электронных устройств до дуговой сварки. У роботов этой серии предусмотрено размещение кабелей и пневмотрубок внутри корпуса, благодаря чему удалось избежать возможных помех при работе дополнительного оборудования. Но, несмотря на это, роботы этой серии отличаются компактностью и высокой скоростью движений всех звеньев. Этот робот незаменим там, где нужен короткий цикл операций, в чем можно убедиться, симулировав работу робота в виртуальной среде, при офф-лайн программировании.
На рисунке выше наглядно видно, из чего состоит робот. Это металлическое основание робота, корпуса 1го, 2го, 3го звеньев, запястье, моторы, оборудованные энкодерами, редукторы и ременные передачи. Остановимся подробней на этих элементах робота.
I. Звенья
Корпус промышленного робота – сложносоставной и состоит из отдельных звеньев. Самое нижнее, нулевое звено – это основание робота. К нему через редуктор первой оси крепится, корпус первого звена, а к корпусу первого звена, через редуктор второй оси, корпус второго звена. Третье звено при помощи редуктора третьей оси, крепится к корпусу второго звена. Четвертое, пятое и шестое звенья образуют модуль называемый запястье. Запястье крепится к корпусу третьего звена через редуктор четвёртой оси.
II. Редукторы
Каждый сустав (или ось) робота состоит из мотора и редуктора. Этот узел принято называть приводом. Физически функцию сустава (сочленения), соединяющего два соседних звена робота, несут редукторы. Они представляют собой, как правило, законченное механическое устройство, с корпусом в виде составного цилиндра. С одной стороны редуктор крепится к звену N, где установлен мотор, с другой стороны к редуктору крепится корпус звена N+1.
Редукторы нижних осей (с первой по третью) обычно имеют полую середину для того чтобы сквозь них можно было провести электрические провода и пневматические трубки для следующих осей и исполнительного органа (инструмента) робота. Однако, основной задачей редуктора является увеличение силы вращения мотора, за счет снижения скорости вращения. Внутри редуктора находится множество механических передач разного рода, устроенных таким образом, чтобы вращение вала двигателя преобразовывалось в более мощное вращение на выходе из редуктора, но с меньшей скоростью. Таким образом, уменьшая вращение мотора в 10 раз, можно достичь десятикратного увеличения мощности привода. Подобный принцип используется в велосипедной системе переключения передач. Велосипеды имеют разные размеры передних и задних звёздочек. Переключение передачи происходит переставлением цепи на звездочки разных размеров на заднем колесе.
Когда выбрана высокая передача и число оборотов колес минимизировано, усилий для вращения педалей требуется меньше, но необходимо увеличить интенсивность их вращения, но ехать по крутым склонам становиться намного проще. Таким образом итоговая мощность увеличивается, при меньшей работе приводов, в данном примере, работе ног на педалях.
В видео описан принцип работы современного редуктора используемый в роботах.
III. Моторы
Звенья сочленённые посредством редукторов приводятся в движение, и удерживаются в определенном положении при помощи сервомоторов (серводвигателей)
Привод, функционирующий в суставе робота, позволяет перемещать руку вверх, вниз или вращать ею, преобразуя электроэнергию в механическое движение. Чаще всего в приводах роботов Kawasaki используются сервомоторы. Расположение серводвигателей в роботах серии R отмечено красными кружками на изображении ниже.
Сервомоторы — это высокопроизводительные моторы, способные точно контролировать положение и скорость, но не каждый тип сервомотора подойдет для современного промышленного робота, так как есть ряд строгих требований, например, точность перемещения до 0,01мм.
Как правило, самым распространенным источником энергии для приводов является электричество, но в некоторых моделях роботов встречается использование гидравлической или пневматической тяги. Некоторые гидравлические приводы уникальны тем, что они могут генерировать большую мощность, сохраняя высокую степень надежности.
Кстати, во роботах Kawasaki для тяжелой нагрузки используются высокопроизводительные сервомоторы переменного тока.
IV. Энкодер
Энкодер — это устройство, которое указывает положение (угол) вала вращения двигателя. При наличии энкодера, можно получить четкие данные о том, как и в каком направлении движется робот.
Самый простой – оптический энкодер, который представляет из себя диск с отверстиями, расположенными по окружности на одинаковом расстоянии друг от друга, и прикрепленный к вращающемуся валу двигателя. Перпендикулярно к двигателю расположены с одной стороны два светодиода, а с обратной стороны – фотодиод для считывания интенсивности света от светодиодов.
Когда двигатель вращается вместе с диском энкодера, свет от диодов проходит через щели или блокируется, поэтому угол и скорость вращения можно определить путем считывания сигналов с фотодиода. Это позволяет сервомоторам точно контролировать положение и скорость.
В роботах Kawasaki установлены высокоточные многооборотные абсолютные энкодеры с 32 битным разрешениям кодовых дисков. Даже при выключенном питании от контроллера, такой энкодер всегда будет фиксировать поворот в том числе более 360° так, как будет питаться от батарейки в руке робота. Поэтому при случайном сдвиге, при транспортировке или монтаже, не потребуется дополнительно настраивать изначальное положение звеньев робота.
V. Трансмиссия, ременная передача
Трансмиссия или ременная передача — является компонентом, который передает крутящий момент, вырабатываемый приводами и редукторами и преобразует его в движение робота. Трансмиссия также способна изменять направление и величину мощности привода. Рассматривая велосипед в качестве примера. Цепь, которая соединяет переднюю звезду с задним колесом, является трансмиссией. Так велосипеды и передвигаются, начиная с вращения педалей и передавая вращательную энергию на заднее колесо с помощью трансмиссии.
Этот принцип также применяется внутри промышленного робота. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов, используя трансмиссионные механизмы, такие как ремни и шестерни. Такая схема применяется в запястье роботов серии R от Kawasaki, что позволило сделать запястье более компактным.
4. Инструмент робота (EOAT)
В западной литераторе можно встретить термин End of arm tooling (EOAT), что дословно переводится как инструмент на конце руки.
Люди могут выполнять различные задачи, используя инструменты, роботы недалеко ушли. Касательно промышленных роботов, как правило они производятся без основного инструмента, который должен крепиться к концу запястья робота. Это может быть захват, сварочная горелка или покрасочный распылитель и многое другое оборудование. В соответствии с задачей и технологией производства инженер на стороне поставщика или на стороне будущего владельца, дополнительно комплектуют робота необходимым оборудованием.
Если нужна универсальность, то можно установить устройство смены инструмента, и робот сможет выполнять несколько задач в рамках одного комплекса. Подробнее с инструментами, роботами и их применениями в производстве вы сможете узнать на страницах нашего сайта.
В видео ниже в качестве инструмента используется нож для надрезов будущего багета
Мы подробно рассмотрели самые важные составляющие промышленного робота, но кто управляет всем этим?
5. Мозг промышленного робота — контроллер
По определению робот это автономное устройство, способное выполнять операции в автоматическом режиме. Поэтому нужно чтобы кто-то или что-то управляло всеми компонентами робота. Этим управляющим устройством является контроллер промышленного робота.
К контроллеру подключается пульт обучения робота, с помощью которого можно запрограммировать траектории его движения и создать управляющую программу по выполнению определенной последовательности действий роботом. К контроллеру промышленного робота можно подключить датчики, инструменты или других роботов и синхронизировать их действия между собой или их взаимодействие с другим оборудованием или оператором.
6. Заключение
В этой статье мы рассмотрели базовую структуру промышленных роботов. Теперь вы имеете представления какие компоненты составляют основу робота и где они расположены. Многие могут подумать, что нет необходимости знать как робот устроен, при рассмотрении вопроса внедрения роботов на свое производство. Тем не менее, эти общие знания помогут определить какой именно робот вам нужен, с каким потенциалом движений, точностью, количеством осей и каким инструментом оснастить для решения ваших производственных задач.
В нашем каталоге вы найдете подробные спецификации по роботам, а также информацию по их возможностям.
Чтобы выполнить вашу производственную задачу наиболее эффективным способом потребуется наиболее подходящий робот. Наши сотрудники всегда рады будут помочь в подборе робота и инструмента для него.
Навигация по статье:
- Роботы и человек. Так ли они отличаются?
- Сравнение робота и человека
- Что нужно для движений робота? Структура робота
- Звенья
- Редукторы
- Моторы
- Энкодер
- Трансмиссия, ременная передача
- Инструмент робота (EOAT)
- Мозг промышленного робота — контроллер
- Заключение
Промышленные и коллаборативные роботы | ABB
Первый в мире электрический промышленный робот был создан ABB более 40 лет назад, равно как и первый в мире промышленный робот для покраски. По сей день ABB остается лидером на рынке робототехники.
Влияние этих роботов на производственные процессы и производительность труда в промышленности было революционным. Их способность выполнять ту же последовательность задач быстрее и точнее, чем это могут делать люди, принесла огромную выгоду производителям и значительно улучшила условия труда для сотрудников.
Решения ABB в робототехнике позволили добиться огромного увеличения объемов производства и повышения качества продукции, а также привели к существенному сокращению использования ручного труда, уменьшению эксплуатационных расходов и количества простоев в работе.
Монотонные и опасные задачи, такие как поднятие и переноска тяжелых предметов, теперь выполняются роботами, что снизило текучесть кадров. Преимущества использования роботов настолько многообразны насколько и существенны.
Роботы ABB играют значительную, хотя порой и невидимую роль в нашей повседневной жизни. С самого утра, когда мы просыпаемся, и до глубокой ночи, когда собираемся лечь спать, мы все время пользуемся изделиями, устройствами или оборудованием, которые были изготовлены роботами ABB. Например, роботы ABB выбирают, упаковывают и укладывают еду и закуски, которые мы едим, и напитки, которые мы пьем, для таких компаний, как Nestlé, Unilever и Cadbury.
Они вырезают, шлифуют, отделывают, красят, упаковывают и укладывают мебель и полы для двух крупнейших производителей – IKEA и Tarkett. Они сваривают, полируют и красят наши компьютеры, ноутбуки, плееры, мобильные телефоны, фотоаппараты и игровые консоли для ведущих мировых брендов – Apple, Dell, Foxconn, Hewlett Packard, Motorola, Nokia и для многих других.
Солнечные батареи на крышах наших домов, посуда на наших столах, строительные материалы, из которых построены наши дома, керамика в наших ванных комнатах, а также кухонные плиты, посудомоечные машины, пластиковые контейнеры, деревянные и металлические шкафы, раковины на наших кухнях – все это изготавливается роботами ABB.
Когда мы больны, мы принимаем таблетки и другие лекарства, которые были выбраны, упакованы и расфасованы роботами ABB для таких компаний, как AstraZeneca, GlaxoSmithKline, Johnson & Johnson и Schering-Plough.
Легковые автомобили, автобусы и грузовые автомобили, на которых мы ездим, изготавливаются – полностью или частично – роботами ABB. Большинство производителей автомобилей и их поставщиков используют робототехнические решения ABB на некоторых или на всех этапах производства, будь то сборка трансмиссии, общая компоновка всех элементов автомобиля или покраска конечного продукта.
На российских предприятиях «трудятся» около 1,5 тысяч роботов ABB. Среди ярких проектов – контроль качества при производстве инсулиновых шприц-ручек на заводе компании Novo Nordisk в Калужской области, сборка и пайка гибких шлейфов электронных плат автомобильных охранных комплексов StarLine в Ленинградской области, сварные операции при изготовлении санок, велосипедов, товаров для дома и отдыха производственной компании «НИКА» в Ижевске, роботизированная линия зафланцовки элементов кузова на заводе Renault в Москве.
Роботы активно применяются и в пищевой промышленности. Так, роботизированные комплексы ABB автоматизировали производственный процесс мясокомбината группы «Черкизово» в Кашире, Вологодского молочного комбината, завода «МолПродукт» в Московской области, завода компании Danone в подмосковном Чехове и предприятия Unilever в Тульской области.
Интеллектуальные робототехнические системы
- Рынки НТИ: Автонет, Технет
- Сквозные технологии НТИ: Сенсорика и компоненты робототехники
- II уровень РСОШ
- 100 баллов к ЕГЭ
Математика Информатика
1 этап
1 октября — 27 октября
2021
Этап 2
9 ноября — 10 января
2022
Финал
21 февраля — 30 апреля
2022
Расписание
{{title}}
{{humanTime}}
- {{#each stage.predmets}}
- {{this.name}} {{/each}}
{{{desc}}}
- {{#if online}}
- Онлайн {{/if}} {{#if offline}}
- Оффлайн {{/if}} {{#if isDistributed}}
- Распределенный {{/if}} {{#if isFulltime}}
- Очный {{/if}}
- {{#each colorTypes}}
- {{this.name}} {{/each}}
Профиль «Интеллектуальные робототехнические системы» посвящен программированию, роботам и автоматизации производства при помощи роботов.
Профиль подойдет всем, кому нравится работать с автоматизированными системами и тем, кто хочет разобраться, как устроены некоторые процессы роботизированного производства, как промышленный робот перемещается, как он составляет свой путь и порядок действий. Какую информацию необходимо знать роботу-погрузчику, чтобы успешно выполнить задачу, насколько сложно просчитать перемещение каждого узла манипулятора, работающего на заводе по выпуску автомобилей. И это далеко не всё, с чем познакомятся участники олимпиады.
Участвуя в профиле, вы сможете получить навыки, которые пригодятся для решения реальных проблем человека. Например, искать решение, чем и как может помочь робот на производстве, как он может облегчить ряд процессов.
Участники на всех этапах олимпиады не только соревнуются, но и получают новые знания и навыки. Один из важнейших результатов участия в олимпиаде: участники научатся разрабатывать свои собственные интеллектуальные робототехнические системы.
Этапы соревнований
1 этап
На первом этапе участникам предстоит решать задания по математике и информатике.
Этап 2
Во втором этапе Олимпиады участникам предстоит решить несколько заданий, которые требуют хороших навыков решения классических задач по программированию и уверенных знаний по геометрии и началу математического анализа в рамках школьной программы.
Большинство заданий этого отборочного этапа будет сформулировано в виде олимпиадных задач по информатике, где есть входные данные и нужно найти ответ.
Для решения задач необходимо уметь работать в команде, поскольку в ограниченное для второго этапа время один человек может не успеть и изучить новый материал, и разработать решение, и обеспечить для него достаточный набор тестовых данных.
На втором этапе участникам большую помощь окажут ссылки на материалы для самостоятельного изучения.
Рекомендуем прорешать все задачники и просмотреть все материалы.
Рекомендуем ознакомиться со всеми материалами с текущей страницы профиля ИРC.
Финал
Задача заключительного этапа профиля ИРС основывается на востребованной робототехнической задаче — динамическая сортировка объектов.
Развитие подобных алгоритмов позволит расширить область применения промышленных манипуляторов. Это может быть как автоматизация складов, логистических центров, так и автоматизация производств. Благодаря этому можно облегчить жизнь труд людей на рабочих местах. Также это позволит выполнять данные процессы быстрее и точнее.
Финальная задача будет требовать от участников применения таких навыков, как определение объектов в рамках рабочей зоны робота с помощью камеры, анализ облака точек с целью определения необходимых объектов и параметров, выбор стратегии по обработки полученной информации и достижении поставленной задачи по манипуляции объектов.
Требования к команде
Знания
Математика: тригонометрия, геометрия, комбинаторика, отдельные разделы теории комплексной плоскости, теории вероятности, теории графов и линейной алгебры, работа с матрицами;
Информатика: кодирование и декодирование информации, структуры хранения и обработки данных, комбинаторные алгоритмы, алгоритмы перебора и сортировки, алгоритмы вычислительной геометрии, отдельные разделы теории автоматов, алгоритмы преобразования изображений, компьютерного зрения, алгоритмы работы с облаком точек;
Специальные знания в области робототехники:
-
свойства и ограничения цифровых и аналоговых датчиков различного принципа действия,
-
алгоритмы обработки цифровой информации,
-
алгоритмы управления и вычисления конфигурации манипуляторов
-
отдельные главы теории автоматического управления,
-
свойства цифровых камер,
-
получение и обработка графической информации,
-
получение и обработка карты глубины,
-
физические ограничения передачи информации.
Hard skills необходимые для старта
-
программирование на Python
-
Работа с библиотеками в Python (numpy, opencv, etc.)
-
использование итеративного процесса разработки;
-
использование систем версифицирования исходного кода для командной разработки программного обеспечения.
Hard skills необходимые финалистам
-
моделирование частей робототехнической системы
-
достижение стабильности работы и отказоустойчивости робототехнического устройства;
-
владение алгоритмами и библиотеками по работе с облаком точек на языке Python;
-
использование итеративного процесса разработки;
-
использование систем версифицирования исходного кода для командной разработки программного обеспечения.
Численность команды и роли
Состав команды: 2-3 человека
Алгоритмист: проектирование алгоритмов принятия решений, проектирование алгоритмов компьютерного зрения, отработка алгоритмов на модели.
Программист-робототехник: специфика контроллера и работы датчиков, камеры, обработка цифровой информации, теория автоматического управления, одометрия.
Программист-интегратор: знание инструментария отладки, перенос алгоритмов на реальное устройство, отладка, управление фронтом работ.
Роли в командах распределяются самими участниками, роли могут пересекаться, для более качественного распределения ролей лучше выписать сильные стороны каждого участника, посмотреть, что нравится каждому из них и после этого уже распределяться зоны ответственности и обязанности.
Материалы подготовки
Разработчики
Партнеры
Как работают роботы | HowStuffWorks
На самом базовом уровне человек состоит из пяти основных компонентов:
- Структура тела
- Мышечная система для перемещения структуры тела
- Сенсорная система, которая получает информацию о теле и окружающей среде
- Источник питания для активации мышц и датчиков
- Мозговая система, обрабатывающая сенсорную информацию и указывающая мышцам, что делать
Конечно, у нас также есть некоторые нематериальные атрибуты, такие как интеллект и мораль, но на самом деле физический уровень, приведенный выше список охватывает его.
Робот состоит из тех же компонентов. Типичный робот имеет подвижную физическую структуру, какой-то двигатель, сенсорную систему, источник питания и компьютерный «мозг», который управляет всеми этими элементами. По сути, роботы — это созданные человеком версии животной жизни — это машины, которые копируют поведение человека и животных.
В этой статье мы исследуем базовую концепцию робототехники и узнаем, как роботы делают то, что они делают.
Джозеф Энгельбергер, пионер промышленной робототехники, однажды заметил: «Я не могу дать определение роботу, но я узнаю его, когда вижу его.«Если вы рассмотрите все разные машины, которые люди называют роботами, вы увидите, что практически невозможно дать исчерпывающее определение. У всех свое представление о том, что представляет собой робот.
Вы, наверное, слышали о некоторых из этих знаменитых роботов:
- R2D2 и C-3PO: умные говорящие роботы с множеством индивидуальности из фильмов «Звездные войны»
- Sony AIBO: роботизированная собака, которая обучается через человеческое взаимодействие
- Honda ASIMO: робот, который может ходить на двух ногах, как человек
- Промышленные роботы: автоматизированные машины, работающие на сборочных линиях
- Данные: почти человеческий андроид из «Звездного пути»
- BattleBots: истребители с дистанционным управлением в Comedy Central
- Роботы для обезвреживания бомб
- Марсоходы НАСА
- HAL: Судовой компьютер в фильме Стэнли Кубрика «2001: Космическая одиссея»
- Robomower: робот для стрижки газонов от Friendly Robotics
- Робот из телесериала «Затерянные в космосе»
- MindStorms: популярный робототехнический комплект LEGO
Все эти вещи, по крайней мере, некоторые люди считают роботами.В самом широком смысле робот определяется как все, что многие люди считают роботом. Большинство робототехников (людей, которые строят роботов) используют более точное определение. Они указывают, что у роботов есть перепрограммируемый мозг (компьютер), который перемещает тело.
Согласно этому определению, роботы отличаются от других подвижных машин, таких как автомобили, из-за их компьютерного элемента. Во многих новых автомобилях есть бортовой компьютер, но он нужен только для небольших настроек. Вы управляете большинством элементов автомобиля напрямую с помощью различных механических устройств.Роботы отличаются от обычных компьютеров по своей физической природе — к нормальным компьютерам не прикреплено физическое тело.
В следующем разделе мы рассмотрим основные элементы, присутствующие в большинстве современных роботов.
Робототехника: факты (Научный путь: Общественное телевидение Айдахо)
См. 10 основных вопросов
Что такое роботы?
Робот происходит от чешского слова «робот», что означает «принудительный труд или труд». Сегодня мы используем слово «робот» для обозначения любой созданной человеком машины, которая может выполнять работу или другие действия, обычно выполняемые людьми, автоматически или с помощью дистанционного управления.Робототехника — это наука и исследование роботов.
Что делают роботы?
Представьте, что ваша работа заключалась в закручивании одного винта на тостере. И вы делали это снова и снова на тостере за тостером, день за днем, в течение недель, месяцев или лет. Такую работу лучше выполняют роботы, чем люди. Большинство роботов сегодня используются для выполнения повторяющихся действий или работ, которые считаются слишком опасными для человека. Робот идеально подходит для входа в здание, в котором есть бомба.Роботы также используются на заводах для создания таких вещей, как автомобили, шоколадные батончики и электроника. Теперь роботы используются в медицине, в военной тактике, для поиска подводных объектов и исследования других планет. Робототехника помогла людям, потерявшим руки или ноги. Роботы — отличный инструмент для помощи человечеству.
Краткая история
Роботы кажутся современным изобретением, но на самом деле данные свидетельствуют о том, что автоматизация была создана для всего, от игрушек до деталей для религиозных церемоний в Древней Греции и Риме.Леонардо да Винчи набросал планы робота-гуманоида в конце 1400-х годов. Жак де Вокансон был известен в 18 веке своей автоматизированной фигурой человека, игравшей на флейте, и уткой, которая могла взмахивать крыльями. Многие автоматизированные изобретения, которые могли вести себя аналогично человеку, были задокументированы на протяжении всей истории. Большинство из них были созданы в основном для развлекательных целей. Писатели-фантасты с большим успехом писали о роботах во всевозможных ситуациях, а это означало, что робот был частью повседневного разговора и воображения.В 1956 году Джордж Девол и Джозеф Энгельбергер основали первую в мире компанию по производству роботов. К 1960-м годам на автомобильном заводе General Motors в Нью-Джерси были внедрены роботы для перемещения автомобильных деталей. Роботы продолжали развиваться, и теперь их можно найти в домах в качестве игрушек, пылесосов и программируемых домашних животных. Сегодня роботы являются частью многих сфер промышленности, медицины, науки, освоения космоса, строительства, упаковки пищевых продуктов и даже используются для выполнения хирургических операций. Ватсон, робот с искусственным интеллектом от IBM, победил игроков-людей в эпизоде Jeopardy.
Так зачем использовать роботов?
Причина, по которой используются роботы, заключается в том, что их часто дешевле использовать, чем людей, роботам легче выполнять некоторые работы, а иногда это единственный возможный способ выполнить некоторые задачи! Роботы могут исследовать внутренние газовые баллоны, вулканы, путешествовать по поверхности Марса или в других местах, слишком опасных для людей, в местах с экстремальными температурами или загрязненной окружающей средой. Роботы могут делать одно и то же снова и снова, не скукая.Они могут сверлить, сваривать, красить, обращаться с опасными материалами, а в некоторых ситуациях роботы намного точнее, чем человек & тире; что может сократить производственные затраты, ошибки или опасности. Роботы никогда не болеют, им не нужно спать, им не нужна еда, им не нужен выходной, и, что самое главное, они никогда не жалуются! Использование роботов дает много преимуществ.
Части робота
Роботы могут быть изготовлены из различных материалов, включая металлы и пластмассы.Большинство роботов состоит из 3 основных частей:
- Контроллер и приборная панель; также известный как «мозг», которым управляет компьютерная программа. Часто программа очень подробна, поскольку она дает команды движущимся частям робота, которым они должны следовать.
- Механические детали и приборная панель; двигатели, поршни, захваты, колеса и шестерни, которые заставляют робота двигаться, хватать, поворачивать и поднимать. Эти части обычно питаются от воздуха, воды или электричества.
- Датчики и приборная панель; рассказать роботу о своем окружении.Датчики позволяют роботу определять размеры, формы, расстояние между объектами, направление и другие отношения и свойства веществ. Многие роботы могут даже определить величину давления, которое необходимо приложить, чтобы схватить предмет, не раздавливая его.
Все эти части работают вместе, чтобы контролировать работу робота.
Нанороботы
Нанороботы или наноботы — это роботы, уменьшенные до микроскопических размеров, чтобы помещать их в очень маленькие пространства для выполнения определенной функции.В настоящее время наноботы все еще находятся в стадии разработки. Будущие нанороботы могут быть помещены в кровоток для выполнения хирургических процедур, которые являются слишком деликатными или слишком сложными для стандартной хирургии. Наноботы могут бороться с бактериями, отслеживая и уничтожая каждую бактериальную клетку, или могут восстанавливать отдельные клетки органов в организме.
Представьте, если бы нанобот мог нацеливаться на раковые клетки и уничтожать их, не касаясь соседних здоровых клеток. Наноботы, вероятно, будут иметь на борту лекарства и хирургические инструменты.Им нужно будет уметь перемещаться по человеческому телу, а затем тоже находить выход. Наноботов можно использовать и в других ситуациях. Крошечные механизмы и инструменты нанороботов могут позволить создавать объекты мельчайших размеров. Некоторые вещи, которые мы только воображаем в научной фантастике, однажды могут стать реальностью. Может быть, однажды вы станете ученым, который будет работать с нанороботами.
Искусственный интеллект
Искусственный интеллект также известен как машинный интеллект или сокращенно ИИ.Некоторым компьютерам и роботам была предоставлена возможность вести себя как человек. Программное обеспечение для распознавания лиц, сложное программное обеспечение для планирования или компьютерные игры, которые дают игрокам ответ на основе действий игроков, — все это формы искусственного интеллекта. Одно время целью ИИ было воссоздать интеллект человека. В настоящее время интеллект насекомых находится в центре внимания исследований и разработок, потому что насекомых и их поведение легче подражать. Наноботы могут основываться на поведении насекомых, работая стаями вместе, чтобы выполнять определенную функцию.
Некоторым роботам и компьютерам была предоставлена возможность учиться и использовать информацию из предыдущих действий для принятия будущих решений. Робот, заполняющий коробку куки-файлами, может «подсчитать» количество куки-файлов в коробке, или компьютер может определить интенсивность движения на улице, чтобы вычислить, когда нужно изменить свет. Эта наука находится на начальной стадии, но разрабатываются роботы, которые могут принимать решения, чтобы подавать еду, переводить слова с одного языка на другой и получать информацию из внешних источников для решения проблем.
Ограничения для роботов
В отличие от фильмов, роботы не могут думать или принимать решения; они всего лишь инструменты, которые помогают нам добиваться результатов. Роботы — это машины с запрограммированными движениями, которые позволяют им двигаться в определенных направлениях или последовательностях. Искусственный интеллект дал роботам больше возможностей обрабатывать информацию и «учиться». Но они по-прежнему ограничены информацией, которую им дают, и функциями, которые им поручено выполнять.
Как работают роботы Том Харрис
| Фото любезно предоставлено НАСА Как и вы, робонавт НАСА имеет подвижное тело, мозг, система питания и сенсорная система. |
На самом базовом уровне люди состоят из пяти основных компонентов:
- Конструкция кузова
- Мышечная система для перемещения структуры тела
- Сенсорная система, которая получает информацию о теле и окружающая среда
- Источник питания для активации мышц и датчиков
- Система мозга, которая обрабатывает сенсорную информацию и сообщает мышцы что делать
Конечно, у нас есть нематериальные атрибуты, такие как интеллект и мораль, но на чисто физическом уровне список выше об этом.
Робот состоит из тех же компонентов. Типичный робот имеет подвижная физическая конструкция, какой-то двигатель, сенсорная система, источник питания и компьютерный «мозг», который управляет всем этим элементы. По сути, роботы — это рукотворные версии животной жизни. это машины, которые копируют поведение человека и животных.
В самом широком смысле робот определяется как все, что люди узнают как робота.Большинство робототехников (людей, которые строят роботов) используйте более точное определение. Они указывают, что у роботов есть перепрограммируемый мозг (компьютер), который перемещает тело.
Согласно этому определению, роботы отличаются от других подвижных машин, например, автомобили, из-за их компьютерного элемента. У многих новых машин есть бортовой компьютер, но он нужен только для небольших настроек. Ты управлять большинством элементов в автомобиле напрямую с помощью различных механических устройств.Роботы отличаются от обычных компьютеров своим физическим природа — к нормальным компьютерам не прикреплено физическое тело.
Компьютер робота контролирует все, что подключено к цепи. К переместите робота, компьютер включит все необходимые моторы и клапаны. Большинство роботов перепрограммируемо — для изменения робота поведения, вы просто пишете новую программу на его компьютер.
@
| Фото любезно предоставлено НАСА JPL Подъемная лестница Урби НАСА |
Не у всех роботов есть сенсорные системы, и лишь немногие способны видеть, слышать, обонять или пробовать.Наиболее распространенное чувство робота — это чувство движение — способность робота отслеживать собственное движение. Стандарт конструкция использует шлицевые колеса, прикрепленные к суставам робота. Светодиод на одном сторона колеса пропускает луч света через прорези к свету датчик на другой стороне колеса. Когда робот перемещает конкретный шарнир, шлицевое колесо вращается. Прорези прерывают световой луч, поскольку колесо вращается.Датчик освещенности считывает образец мигающего света и передает данные на компьютер. Компьютер может сказать точно насколько сильно шарнир повернулся в соответствии с этим шаблоном. Это тоже самое базовая система, используемая в компьютерных мышах.
Это основные болты и гайки робототехники. Робототехники могут комбинируйте эти элементы бесконечным количеством способов для создания роботов неограниченная сложность. В следующем разделе мы рассмотрим один из самых популярные конструкции, роботизированная рука.
Роботизированный РукаТермин робот происходит от чешского слова robota , как правило. переводится как «принудительный труд». Это описывает большинство роботы довольно хорошо. Большинство роботов в мире предназначены для тяжелых, серийные производственные работы. Они справляются с трудными задачами, опасны или скучны для людей.
@
| Роботизированные руки являются неотъемлемой частью автомобиля изготовление. |
Самым распространенным производственным роботом является роботизированная рука . А Типичная роботизированная рука состоит из семи металлических сегментов, соединенных шестью суставы. Компьютер управляет роботом, вращая отдельные ступени на . двигатели , соединенные с каждым шарниром (в некоторых более крупных рычагах используется гидравлика или пневматика). В отличие от обычных двигателей, шаговые двигатели движутся точно приращения (узнайте, как это сделать, в Anaheim Automation).Это позволяет компьютер, чтобы двигать руку очень точно, повторяя то же самое движение снова и снова. Робот использует датчики движения, чтобы он перемещается только на нужную величину.
Промышленный робот с шестью суставами очень напоминает человеческую руку. у него есть эквивалент плеча, локтя и запястья. Обычно плечо крепится к стационарной базовой конструкции, а не к подвижное тело.Этот тип робота имеет шесть степеней свободы , Это означает, что он может поворачиваться шестью разными способами. Человеческая рука, для сравнения, имеет семь степеней свободы.
Работа вашей руки — двигать рукой с места на место. Сходным образом, Работа робота-манипулятора — перемещать концевой эффектор с места на место. Вы можете оснастить роботизированные руки всевозможными концевыми эффекторами, которые подходят для конкретного приложения.Один из распространенных конечных эффекторов — это упрощенная версия руки, которая может захватывать и переносить разные объекты. Роботизированные руки часто имеют встроенные датчики давления , которые сообщить компьютеру, насколько сильно робот держит конкретный объект. Это не дает роботу уронить или сломать то, что он несет. К другим концевым эффекторам относятся паяльные лампы, дрели и малярные машины.
Промышленные роботы предназначены для того, чтобы делать то же самое в контролируемая среда, снова и снова.Например, робот может закрутите крышки на банки с арахисовым маслом, идущие с конвейера. К научить робота делать свою работу, программист проводит руку через движения с помощью портативного контроллера. Робот хранит точные последовательность движений в своей памяти, и делает это снова и снова каждый время, когда с конвейера сходит новый агрегат.
Большинство промышленных роботов работают на сборочных линиях автомобилей, устанавливая автомобили. вместе.Роботы могут выполнять большую часть этой работы более эффективно, чем человек. существа, потому что они такие точные. Они всегда сверлят точно в одном и том же месте, и они всегда затягивают болты с одинаковым усилием, независимо от того, сколько часов они работали. Роботы-производители также очень важен в компьютерной индустрии. Это занимает невероятно точная рука, чтобы собрать крошечный микрочип.
Мобильные роботыРоботизированные руки относительно легко построить и запрограммировать, потому что они работать в замкнутом пространстве.Когда вы отправляете, все становится немного сложнее робот вышел в мир.
@
| Фото любезно предоставлено НАСА НАСА FIDO Ровер предназначен для исследования Марса. |
Первое препятствие — дать роботу работающую систему передвижения. Если роботу нужно будет двигаться только по ровной поверхности, колеса или гусеницы лучший вариант.Колеса и гусеницы также могут работать на пересеченной местности. если они достаточно большие. Но конструкторы роботов часто смотрят на ног вместо этого, потому что они более адаптируемы. Создание роботов на ногах также помогает исследователям понять естественное движение — это полезный упражнения в биологических исследованиях.
@
Обычно гидравлические или пневматические поршни перемещают ноги робота назад и вперед.Поршни прикрепляются к разным сегментам ног, как мышцы. прикрепить к разным костям. Это настоящая уловка — получить все эти поршни работать вместе правильно. В детстве ваш мозг должен был понять правильная комбинация мышечных сокращений, чтобы ходить в вертикальном положении не падая. Точно так же конструктор роботов должен выяснить правильное сочетание движений поршня при ходьбе и программе эту информацию в компьютер робота.Многие мобильные роботы имеют встроенная балансировочная система (например, набор гироскопов) который сообщает компьютеру, когда ему нужно исправить свои движения.
@
| Фото любезно предоставлено НАСА НАСА Frogbot использует пружины, связи и моторы, чтобы прыгать с места на место. |
Двуногие движения (ходьба на двух ногах) по своей природе нестабильны, что очень затрудняет реализацию в robots.Чтобы создать больше стабильные ходунки-роботы, дизайнеры обычно обращаются к животному миру, особенно насекомых. Шестиногие насекомые обладают исключительно хорошими баланс, и они хорошо адаптируются к широкому разнообразию местности.
Некоторыми мобильными роботами управляют дистанционно — им говорит человек что делать и когда это делать. Пульт дистанционного управления может связываться с робота через подключенный провод или с помощью радио- или инфракрасных сигналов.Удаленные роботы, часто называемые кукольными роботами , полезны для исследование опасных или труднодоступных мест, таких как глубокое море или внутри вулкана. Некоторые роботы только частично контролируются удаленный. Например, оператор может направить робота к определенное место, но не направляйте его туда — робот сам найдет свое способ.
@
| Для чего это нужно? Мобильные роботы заменяют людей в ряде способами.Некоторые исследуют другие планеты или негостеприимные районы на Земле, сбор геологических проб. Другие ищут мины на бывших полях сражений. Полиция иногда использует мобильных роботов искать бомбу или даже задержать подозреваемого. @
Мобильные роботы также работают в домах и
предприятия. Больницы могут использовать роботов для транспортировки лекарств.
Некоторые музеи используют роботов для патрулирования своих галерей в ночное время.
мониторинг качества воздуха и уровня влажности. Несколько компаний
разработали роботов, которые будут пылесосить ваш дом, пока вы
спать. |
Автономный
Мобильность
Автономные роботы могут действовать самостоятельно, независимо от
контроллер.Основная идея состоит в том, чтобы запрограммировать робота, чтобы он реагировал на определенное
путь к внешним раздражителям. Очень простой подвижный робот — это
хорошая иллюстрация того, как это работает.
Роботы этого типа оснащены датчиком на бампере для обнаружения препятствий. Когда ты Включите робота, он движется по прямой. Когда это наконец сталкивается с препятствием, при ударе срабатывает датчик на бампере. Робот программирование говорит ему отступить, повернуть направо и двигаться вперед опять же в ответ на каждую шишку.Таким образом, робот меняет направление каждый раз, когда он встречает препятствие.
@
| Фото любезно предоставлено NASA Автономный Urbie предназначен для различных городских операций, в том числе военных разведка и спасательные операции. |
Продвинутые роботы используют более сложные версии той же идеи.Робототехники создают новые программы и сенсорные системы для создания роботов. умнее и проницательнее. Сегодня роботы могут эффективно перемещаться по разнообразие сред.
Более простые мобильные роботы используют инфракрасные или ультразвуковые датчики, чтобы видеть препятствия. Эти датчики работают так же, как и эхолокация животных: робот издает звуковой сигнал или луч инфракрасного света и обнаруживает отражение сигнала.Робот определяет расстояние до препятствий в зависимости от того, сколько времени требуется сигналу, чтобы прийти в норму.
@
| Вид Урби |
Некоторые автономные роботы могут работать только в привычной, ограниченной среда. Роботы-газонокосилки, например, зависят от заглубленной границы. маркеры, чтобы определить пределы своего двора. Робот-уборщик офиса может потребоваться карта здания, чтобы перемещаться от точки к точка.
Более продвинутые роботы могут анализировать и адаптировать к незнакомым окружающей среде, даже в районах с пересеченной местностью.Эти роботы могут связывать определенные модели местности с определенными действиями. Робот-вездеход, например, может построить карту земли перед ним на основе его визуальные датчики. Если на карте виден очень ухабистый рельеф, робот знает, что нужно путешествовать другим путем. Такая система очень полезна для исследовательских роботов, которые работают на других планетах (см. JPL Робототехника, чтобы узнать больше).
Альтернативный дизайн робота использует менее структурированный подход — случайность .Когда этот тип роботов застревает, он каждый раз перемещает свои придатки. способ пока что-то не работает. Датчики силы очень тесно взаимодействуют с исполнительные механизмы, а не компьютер, управляющий всем на основе программа. Это что-то вроде муравья, пытающегося преодолеть препятствие — он, кажется, не принимает решения, когда ему нужно преодолеть препятствие, он просто продолжает пробовать что-то, пока не преодолеет его.
@
Будущее:
AI
Искусственный интеллект (AI), возможно, самая захватывающая область
в робототехнике.Это, безусловно, самый противоречивый момент: все согласны.
что робот может работать на сборочной линии, но нет единого мнения по
может ли робот когда-нибудь быть умным.
Компьютеры уже могут решать задачи в ограниченных областях. В основная идея решения проблем ИИ очень проста, хотя ее выполнение сложный. Во-первых, робот или компьютер с ИИ собирает факты о ситуации с помощью датчиков или человека.Компьютер сравнивает это информацию к сохраненным данным и решает, что эта информация означает. Компьютер выполняет различные возможные действия и предсказывает, какие действие будет наиболее успешным на основе собранной информации. Из Конечно, компьютер может решать только те проблемы, которые он запрограммирован решать — у него нет обобщенных аналитических способностей. Шахматные компьютеры один из примеров такой машины.
Некоторые современные роботы также могут выучить за ограниченное время. емкость. Обучающиеся роботы распознают, если определенное действие (движение ногами определенным образом, например) достигли желаемого результата (перемещаясь по препятствие). Робот сохраняет эту информацию и пытается успешно действие в следующий раз, когда он столкнется с той же ситуацией. Опять же, современный компьютеры могут делать это только в очень ограниченных ситуациях.Они не могут поглотить любая информация, как человек может. Некоторые роботы могут учиться имитируя человеческие действия. В Японии робототехники научили робота танцевать, демонстрируя сами движения.
Некоторые роботы могут социально взаимодействовать . Кисмет, робот из M.I.T’s Лаборатория искусственного интеллекта, распознает язык тела человека и интонация голоса и отвечает соответствующим образом. Создатели Kismet интересно, как взаимодействуют люди и младенцы, основываясь только на тоне речь и визуальный сигнал.Это низкоуровневое взаимодействие могло быть фундамент системы обучения, подобной человеку.
Кисмет и другие гуманоидные роботы в Массачусетском технологическом институте. AI Lab работают с использованием нетрадиционная структура управления. Вместо того, чтобы направлять каждое действие используя центральный компьютер, роботы управляют действиями нижнего уровня с помощью компьютеры нижнего уровня. Директор программы Родни Брукс считает, что это более точная модель человеческого интеллекта.Мы делаем большинство вещей автоматически; мы не решаем делать их на высшем уровне сознание.
@
Настоящая задача ИИ — понять, как естественный интеллект работает. Разработка искусственного интеллекта — это не создание искусственного сердца — у ученых нет простой конкретной модели, на которой можно было бы работать. Мы знаем что мозг содержит миллиарды и миллиарды нейронов, и что мы думать и учиться, устанавливая электрические связи между разными нейроны.Но мы не знаем точно, как складываются все эти связи. к более высоким рассуждениям или даже операциям низкого уровня. Сложная схемотехника кажется непонятным.По этой причине исследования ИИ носят в основном теоретический характер. Ученые выдвигают гипотезы о том, как и почему мы учимся и думаем, и экспериментируют с свои идеи с использованием роботов. Брукс и его команда сосредоточились на роботах-гуманоидах потому что они чувствуют, что способность воспринимать мир как человек необходим для развития интеллекта, подобного человеческому.Это также делает это людям легче взаимодействовать с роботами, что потенциально делает роботу легче учиться.
Так же, как физическая конструкция роботов — удобный инструмент для понимания анатомии животных и человека, исследования искусственного интеллекта полезны для понимания того, как естественный интеллект работает. Для некоторых робототехников это понимание является конечная цель создания роботов. Другие представляют себе мир, в котором мы живем бок о бок с интеллектуальными машинами и использование множества меньших роботы для ручного труда, здравоохранения и связи.Номер Эксперты по робототехнике предсказывают, что эволюция роботов в конечном итоге повернет нас в киборгов — людей, интегрированных с машинами. Возможно, люди в будущее может погрузить их разум в крепкого робота и жить ради тысячи лет!
В любом случае роботы, безусловно, будут играть большую роль в нашей повседневной живет в будущем. В ближайшие десятилетия роботы будут постепенно перемещаться из промышленного и научного мира в повседневную жизнь, в так же, как компьютеры распространились в домах в 1980-х годах.
Лучший способ понять роботов — это взглянуть на конкретные конструкции. В ссылки на следующей странице покажут вам различные проекты роботов вокруг мир.
(Ссылка из HowStuffWorks: Как Роботы работают)
Что такое роботы и как они работают?
Робот — это тип автоматизированной машины, которая может выполнять определенные задачи с минимальным вмешательством человека или без него, а также со скоростью и точностью.Область робототехники, которая занимается проектированием, проектированием и эксплуатацией роботов, за последние 50 лет значительно продвинулась вперед.
IDC определяет робототехнику как один из шести ускорителей инноваций, способствующих цифровой трансформации. К другим относятся 3D-печать, когнитивные вычисления, безопасность нового поколения и виртуальная реальность или дополненная реальность.
Что умеют роботы?По сути, существует столько разных типов роботов, сколько задач, которые они должны выполнять.Роботы могут выполнять одни задачи лучше, чем люди, но другие лучше оставить людям, а не машинам.
Роботы умеют лучше людей:
- Автоматизируйте ручные или повторяющиеся действия в корпоративных или промышленных условиях.
- Работайте в непредсказуемых или опасных условиях, чтобы выявлять опасности, например утечки газа.
- Обработка и предоставление отчетов для корпоративной безопасности.
- Заполните рецепты на лекарства и приготовьте внутривенные инъекции.
- Доставляйте онлайн-заказы, обслуживание номеров и даже пакеты с едой во время чрезвычайных ситуаций.
- Ассистент во время операций.
- Роботы также могут создавать музыку, следить за береговой линией на предмет опасных хищников, помогать в поиске и спасении и даже помогать в приготовлении пищи.
Несмотря на растущее повсеместное распространение, использование роботов имеет несколько недостатков.
Могут, например:
- оперируют, но не успокаивают напуганных пациентов;
- распознает незаметные шаги в закрытой зоне, но не принимает мер против взломщиков ворот;
- проведут занятия для пожилых людей, но не избавят их от одиночества;
- помогать медицинским работникам с диагнозами, но не сочувствовать пациентам; и
- учатся на данных, но неправильно реагируют на непредвиденные ситуации.
Усложняющиеся возможности роботов в конечном итоге устранят некоторые человеческие задачи, но не все. Современные технологии робототехники могут автоматизировать только 25% задач в непредсказуемых, зависящих от человека областях, таких как строительство и уход. Но роботы зависят от человеческого программирования — и они (вероятно) всегда будут.
Виды роботовЕсть столько разных типов роботов, сколько и задач.
1. Андроиды
Андроиды — это роботы, похожие на людей.Часто они подвижны, передвигаются на колесах или гусеничном ходу. По данным Американского общества инженеров-механиков, эти гуманоидные роботы используются в таких областях, как уход и личная помощь, поиск и спасение, освоение космоса и исследования, развлечения и образование, связи с общественностью и здравоохранение, а также производство. По мере роста числа вариантов использования и приложений рынок Android к 2026 году достигнет 13 миллиардов долларов.
2. Телечир
Телечир — это сложный робот, которым дистанционно управляет человек-оператор для системы телеприсутствия.Это дает этому человеку ощущение того, что он находится в отдаленной, опасной или чужой среде, и позволяет им взаимодействовать с ним, поскольку телечир постоянно обеспечивает сенсорную обратную связь.
3. Робот дистанционного присутствия
Робот телеприсутствия имитирует опыт — и некоторые возможности — физического присутствия в определенном месте. Он сочетает в себе удаленный мониторинг и управление с помощью телеметрии, передаваемой по радио, проводам или оптоволокну, и обеспечивает удаленные бизнес-консультации, здравоохранение, домашний мониторинг, уход за детьми и многое другое.
Роботизированная хирургическая система da Vinci позволяет хирургам управлять миниатюрными хирургическими инструментами, установленными на роботизированных манипуляторах, с помощью другой руки, имеющей увеличенную 3D-камеру. Камера обеспечивает врачам обзор участка, когда они манипулируют инструментами с помощью пальцевого главного управления.4. Промышленный робот
IFR (Международная федерация робототехники) определяет промышленный робот как «автоматически управляемый, перепрограммируемый многоцелевой манипулятор, программируемый по трем или более осям.«Пользователи также могут адаптировать этих роботов к различным приложениям. Объединение этих роботов с ИИ помогло предприятиям вывести их за рамки простой автоматизации и перейти к более высокоуровневым и более сложным задачам.
По данным IFR, в 2019 году по всему миру было установлено более 3
промышленных роботов, при этом лидирующие позиции занимают Китай, Япония и США.
В промышленных условиях такие роботы могут:
- оптимизировать производительность процесса;
- автоматизировать производство для повышения производительности и эффективности;
- ускорить разработку продукта;
- повысить безопасность; и
- меньше затрат.
5. Роевой робот
Роботы Swarm (также известные как роботы-насекомые) работают в составе флотов от нескольких до тысяч, и все они находятся под контролем одного контроллера. Эти роботы аналогичны колониям насекомых, поскольку индивидуально демонстрируют простое поведение, но демонстрируют более сложное поведение со способностью выполнять сложные задачи в целом.
6. Умный робот
Это самый продвинутый вид роботов.Умный робот имеет встроенную систему искусственного интеллекта, которая учится на своей среде и опыте, чтобы накапливать знания и расширять возможности для постоянного улучшения. Умный робот может сотрудничать с людьми и помогать решать проблемы в следующих областях:
- нехватка сельскохозяйственных рабочих рук;
- пищевых отходов;
- изучение морских экосистем;
- организация продукции на складах; и
- расчистка от завалов зон бедствий.
Не все роботы похожи на HAL 9000 из 2001: Space Odyssey или BigDog — внедорожный четвероногий робот со сложными датчиками, гироскопами и гидравлическими приводами — от Boston Dynamics.Некоторые из них имеют человеческие черты (андроиды), а другие — все механические конечности (PackBot). Третьи выглядят как брелки (тамагочи) или летающие игрушки (Roomba).
Тем не менее, все роботы имеют некоторые общие характеристики, например:
- механическое строительство
- электрические компоненты
- компьютерное программирование
По мере развития ИИ и программного обеспечения роботы станут умнее, эффективнее и будут решать более сложные задачи.
Роботизированная автоматизация процессов и интеллектуальная автоматизация процессов
Технология роботизированной автоматизации процессов (RPA) включает в себя проектирование, развертывание и использование программных роботов для выполнения следующих задач:
- автоматизировать бизнес-процессы на основе правил;
- оптимизировать работу предприятия;
- экономия человеческих усилий; и
- меньше затрат.
RPA автоматизирует повторяющиеся задачи, чтобы человеческий персонал мог сосредоточиться на более ценной работе. Сценарии использования могут быть простыми (автоматические ответы по электронной почте) или сложными (автоматизация тысяч заданий).
RPA — это ступенька к более продвинутой интеллектуальной автоматизации процессов (IPA). IPA добавляет возможности принятия решений, инструменты искусственного интеллекта и когнитивные технологии, такие как обработка естественного языка и машинное обучение.
RPA ведет к более совершенным интеллектуальным системам автоматизации процессов. Роботы и робототехника: краткая историяПьеса 1921 г., р.U.R. , что означает универсальные роботы Россум, чешский писатель Карел Чапек, впервые ввел слово «робот». Эти роботы были искусственными людьми, а не машинами, и могли думать самостоятельно, поэтому они чем-то похожи на современных андроидов. Айзек Азимов сказал, что Чапек ввел слово «робот» во все языки, на которых написана научная фантастика. Азимов представил слово «робототехника» и свои знаменитые «Три закона робототехники» в своем рассказе «Обход».
Первые роботы, хотя в то время их так не называли, на самом деле появились за несколько веков до ревущих двадцатых.В 1478 году Леонардо да Винчи сконструировал самоходный автомобиль, который до сих пор считается важным для робототехнических разработок. Хотя эта автономная система не прошла мимо чертежной доски, в 2004 году группа итальянских ученых воспроизвела ее конструкцию в виде цифровой модели, доказав, что она работает.
Новаторские работы Азимова и да Винчи заложили основу для последующих разработок. В 1950 году английский ученый-компьютерщик Алан Тьюринг разработал тест Тьюринга, который первоначально назывался «Имитационная игра», и заложил основу для дальнейших исследований в области искусственного интеллекта и робототехники.
Тест Тьюринга, разработанный Аланом Тьюрингом, представляет собой метод исследования, позволяющий определить, может ли устройство ИИ (компьютер, робот и т. Д.) Думать как человек.Стэнли Кубрик « 2001: Космическая одиссея » представил одного из самых первых в мире роботов искусственного интеллекта — HAL 9000 . HAL может распознавать речь, понимать естественный язык и даже выигрывать шахматные партии. Теперь, когда HAL входит в Зал славы Университета Карнеги-Меллона, он по-прежнему вдохновляет ученых на поиск способов дублирования своих возможностей, которые предполагались в 1960-х годах.
В 1950-х годах Джордж К. Девол изобрел перепрограммируемый манипулятор — Unimate. Инженер Джозеф Энглебергер приобрел патент на робота Девола и преобразовал его конструкцию в первого в мире промышленного робота . В конце концов он получил звание «Отец робототехники».
В 1966 году Массачусетский технологический институт разработал одного из первых ботов на основе искусственного интеллекта, ELIZA, в то время как SRI International позже разработала Shakey, самоуправляемого робота для специализированных промышленных приложений. К началу 70-х ученые успешно интегрировали ботов в медицину с MYCIN, чтобы помочь идентифицировать бактерии, и компьютерный диагностический инструмент INTERNIST-1.В 80-х годах прошлого века была разработана робототехника ALVINN, которая используется в современных беспилотных автомобилях.
К 1990-м годам боты, ориентированные на потребителя, появились в виде компьютерных игр, таких как Tamagotchi. После 2000 года интерес к роботам и робототехнике резко вырос с выпуском SmarterChild, запрограммированного бота в AOL Instant Messenger, который теперь считается предшественником искусственного интеллекта Siri от Apple.
В начале 2000-х были изобретены PackBot, военный робот, и Stanley, автомобильный бот , .Примечательно, что PackBot сыграл важную роль в ликвидации последствий терактов 11 сентября, так как службы быстрого реагирования отправили робота в завалы для поиска жертв и оценки структурной целостности обломков. PackBot отправил обратно фотографии из труднодоступных мест, помогая в спасательных операциях.
Стэн — робот, который автономно перемещает транспортные средства в целях логистики.PackBot вдохновил новую эру робототехники, ускорив разработку более совершенных автономных машин, которые теперь помогают в следующих областях:
- Управление чрезвычайными ситуациями
- правоохранительные органы
- прогнозы погоды
- бытовая гигиена
- военная разведка
Позже бытовые роботы, такие как Roomba, и роботы на основе искусственного интеллекта, такие как Siri и Alexa, проложили путь для роботов в повседневной жизни людей, развивая их потенциал.
Современные роботы могут выполнять ряд сложных задач, которые даже полвека назад сочли бы научной фантастикой. Умные, интеллектуальные роботы теперь сотрудничают с людьми и помогают решать проблемы, которые в прошлом казались неразрешимыми.
См. Также: нанотехнологии, сверхъестественная долина, робот телеприсутствия и робототехника
Роботы-частицы работают вместе для выполнения задач
Ученые создали робота, состоящего из нескольких единиц, которые могут работать как кластер, реагируя на стимулы и воздействуя на окружающую среду без необходимости какого-либо централизованного управления — во многом как живые клетки.
Каждая из круглых единиц или «частиц» имеет диаметр до 23,5 сантиметров. Частицы неплотно соединены магнитами и могут двигаться только за счет расширения или сжатия. Но, несмотря на их индивидуальную простоту, как группа они способны к более изощренному поведению, например, двигаться к источнику света. Слабосвязанная масса более устойчива, чем многие другие роботизированные системы, потому что у нее нет единой точки отказа и она может продолжать работать, даже если некоторые люди станут инвалидами, сообщили исследователи в марте в журнале Nature .
Ученые говорят, что уменьшенные версии частиц могут быть использованы в поисково-спасательных операциях — например, для разбрасывания оснащенных датчиками устройств над полем обломков разрушенного дома для поиска похороненных жертв. Крошечные единицы также могут доставлять лекарства в труднодоступные части человеческого тела или стимулировать исследования, моделируя клеточное действие, участвующее в формировании органов.
Прототипы частиц оснащены датчиками света и простой электроникой, которые заставляют их расширяться или сжиматься в соответствии с определенным алгоритмом.Каждая частица измеряет интенсивность ближайшего света и передает это значение своим соседям. Сравнивая, сколько света он обнаруживает относительно других, каждая единица решает, когда начать цикл расширения и сжатия, заставляя их всех двигаться как группа.
Исследователи создали кластеры из 24 частиц и показали, что они могут перемещаться к источнику света — своего рода движение, сравнимое с тем, как живые клетки собираются и мигрируют для заживления ран и других функций.«В нашей системе каждая частица очень проста, и нет централизованного контроля над кластером», — говорит Даниэла Рус, директор лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института и один из руководителей группы. Подразделения «работают вместе, не полагаясь на каких-либо конкретных людей». (Рус входит в совет консультантов журнала Scientific American .)
Робот также может обходить препятствия и толкать предметы. А в моделировании с количеством единиц до 100 000, даже если 20 процентов перестанут работать, кластер все равно сможет двигаться примерно со скоростью, равной половине своей максимальной.
«Ожидается, что этот вид технологии будет применяться для таких задач, как поиск, сбор и передача информации и транспортировка [объектов] в виде роя», — говорит Хадзиме Асама, профессор инженерии Токийского университета, который не принимал участия в изучение. «Но есть еще много проблем, которые необходимо решить, прежде чем дойти до реальных приложений, включая способность адаптироваться к изменениям в задачах, окружающей среде и собственном состоянии робота».
Факты о роботах для детей
Атлас (2016), двуногий робот-гуманоидРобот — это искусственный агент, то есть он действует как заменитель человека, делая то, для чего он предназначен.
Роботы — это обычно машины, управляемые компьютерной программой или электронной схемой. Они могут напрямую контролироваться людьми. Они могут быть похожи на людей, и в этом случае их поведение может указывать на интеллект или мысли. Большинство роботов выполняют определенную работу и не похожи на людей. Они могут быть разных форм.
Однако в художественной литературе роботы обычно выглядят как люди и, кажется, живут собственной жизнью. Есть много книг, фильмов и видеоигр с роботами.Робот Исаака Азимова, пожалуй, самый известный.
История
Модель робота Леонардо с внутренним устройством. Возможно, построенный Леонардо да Винчи около 1495 года. У. Х. Ричардс с «Джорджем», 1932 год.Люди давно интересовались созданием машин, которые будут делать для нас работу. Но для создания всего лишь одной машины требуются время и деньги, поэтому ранние идеи остались идеями или были созданы для того, чтобы рассмешить богатых людей. Леонардо да Винчи сконструировал машину в форме человека, которая выглядела как рыцарь в 1464 году.Управлять им можно с помощью веревок и колес. Другие инженеры и мечтатели рисовали людей-механиков. В 1920 году Карел Чапек написал о них рассказ, в котором он использовал слово из чешского языка, связанное с словом «работа»: робот.
Самые успешные конструкции роботов 20 века не были сделаны так, чтобы они выглядели как люди. Они были созданы для использования. Джордж Девол создал первую из них, Unimate, в 1954 году, используя одну руку и одну руку. General Motors купила его в 1960 году. В следующем году он начал работу на заводе в Нью-Джерси, поднимая и складывая куски металла, которые были слишком горячими, чтобы люди могли дотронуться до них.Инженеры могли его запрограммировать и перепрограммировать, если нужно.
Современные роботы
Роботы имеют множество применений. Многие фабрики используют роботов, чтобы выполнять тяжелую работу быстро и без ошибок. Они не похожи на людей, потому что созданы для того, чтобы что-то делать. Это «промышленные» роботы. Некоторые роботы находят и избавляются от бомб. Если кто-то совершит ошибку, робот будет поврежден или уничтожен, что лучше, чем убить человека. Есть также роботы, которые помогают дома, например, пылесосить или запускать газонокосилку.Такие роботы должны узнавать о зоне работы.
Некоторые роботы проводят операции в местах внутри тела, где человеческая рука слишком велика.
Марсоходы — это роботы для исследования далеких планет. Поскольку для отправки радиосигнала с Земли на другую планету требуется много времени, роботы выполняют большую часть своей работы в одиночку, без команд с Земли.
Люди до сих пор думают, что роботы имеют форму человека — две ноги, две руки и голову. ASIMO — это робот, который помогает ученым научиться конструировать и программировать роботов.Он может ходить, что непросто запрограммировать.
Виды роботов
Четвероногий военный робот Cheetah, эволюция BigDog (на фото), был признан самым быстроногим роботом в мире в 2012 году, побив рекорд, установленный двуногим роботом Массачусетского технологического института в 1989 году. ДРУГ-робот, обеспечивающий уходАвтономных роботов — роботов, не управляемых людьми:
- Аэробот — робот, способный самостоятельно летать на других планетах
- Android — робот-гуманоид; по форме или форме напоминающий человека
- Automaton — ранний самостоятельный робот, выполняющий одни и те же действия снова и снова
- Автономное транспортное средство — транспортное средство, оснащенное системой автопилота, способное перемещаться из одной точки в другую без участия человека-оператора
- Ballbot — динамически устойчивый мобильный робот, предназначенный для балансировки на одном сферическом колесе (т.е., мяч)
- Киборг — также известный как кибернетический организм, существо, имеющее как биологические, так и искусственные (например, электронные, механические или роботизированные) части
- Робот по обезвреживанию взрывоопасных предметов — мобильный робот, предназначенный для определения наличия взрывчатых веществ в объекте; некоторые несут детонаторы, которые можно положить на объект и активировать после того, как робот извлечет
- Гиноид — робот-гуманоид, напоминающий женщину-человека
- Hexapod (ходок) — шестиногий шагающий робот, использующий простое движение, подобное насекомому.
- Промышленный робот — перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств с помощью изменяемых запрограммированных движений для выполнения различных задач.
- Робот-насекомое — небольшой робот, созданный для имитации поведения насекомых, а не сложного поведения человека.
- Microbot — микроскопические роботы, предназначенные для проникновения в тело человека и лечения болезней
- Военный робот — экзокостюм, способный сливаться со своим пользователем для повышения силы, скорости, управляемости и т. Д.
- Мобильный робот — самоходный автономный робот, способный двигаться по механически неограниченному курсу.
- Крылатая ракета — управляемая роботом управляемая ракета, несущая взрывчатую нагрузку.
- Музыкальный развлекательный робот — робот, созданный для музыкального развлечения, играя на инструментах, сделанных на заказ или инструментах, разработанных людьми.
- Nanobot — такой же, как микробот, но меньшего размера. Компоненты имеют масштаб нанометра или близкий к нему (10 −9 метров).
- Робот-протез — программируемый манипулятор или устройство, заменяющее отсутствующую конечность человека.
- Rover — робот с колесами, предназначенный для передвижения по местности других планет
- Сервисный робот — машины, расширяющие возможности человека.
- Snakebot — робот или роботизированный компонент, напоминающий щупальце или хобот слона, в котором используется множество небольших приводов для обеспечения непрерывного изогнутого движения компонента робота с множеством степеней свободы.Обычно это применяется к роботам-змеям, которые используют это как гибкий манипулятор. Более редкое применение — робот-змея, где весь робот является мобильным и похожим на змею, чтобы получить доступ через узкие пространства.
- Хирургический робот — дистанционный манипулятор для хирургии замочной скважины
- Шагающий робот — робот, способный передвигаться пешком. Из-за трудностей с равновесием двуногие шагающие роботы до сих пор были редкостью, и большинство шагающих роботов использовали походку, похожую на насекомых, на нескольких лапах.
По способу передвижения
Мобильных роботов можно классифицировать по:
- Среда, в которой они путешествуют:
- Наземные или домашние роботы. Чаще всего они колесные, но также включают в себя роботов на ногах с двумя или более ногами (гуманоидные или похожие на животных или насекомых).
- Воздушных роботов обычно называют беспилотными летательными аппаратами (БПЛА).
- Подводных роботов обычно называют автономными подводными аппаратами (АНПА).
- Полярные роботы, предназначенные для навигации в ледяной среде, заполненной трещинами
- Устройство, которое они используют для передвижения, в основном:
- Ноги робота — ноги человека (т.е. андроид) или звероподобные ноги
- Треков
- Колесный робот
Восточный и западный вид
Восточные мысли о роботах
Примерно половина всех роботов в мире находится в Азии, 32% — в Европе, 16% — в Северной Америке, 1% — в Австралии и 1% — в Африке. 30% всех роботов в мире находятся в Японии. В Японии больше всего роботов из всех стран мира, и она является лидером в мировой индустрии робототехники. Япония на самом деле считается мировой столицей робототехники.
В Японии и Южной Корее идеи роботов будущего были в основном положительными. Положительный прием роботов здесь может быть отчасти из-за известного мультяшного робота «Астробой». Китай выразил взгляды на робототехнику, аналогичные взглядам Японии и Южной Кореи, но Китай отстает и от Америки, и от Европы в разработке робототехники. Восточноазиатская точка зрения состоит в том, что роботы должны быть примерно равны людям. Они считают, что роботы могут заботиться о стариках, обучать детей или служить помощниками. В Восточной Азии распространено мнение, что было бы хорошо, если бы роботы стали более популярными и продвинутыми.Эта точка зрения противоположна популярной западной точке зрения.
«Это начало эры, в которой люди и роботы могут сосуществовать», — говорит японская фирма Mitsubishi об одном из многих человекоподобных роботов в Японии. Министерство информации и коммуникаций Южной Кореи прогнозирует, что в период с 2015 по 2020 год в каждой семье Южной Кореи будет робот.
Западные мысли о роботах
Западные общества с большей вероятностью будут против или даже опасаются разработки роботов.В научно-фантастических фильмах и других историях они часто изображаются как опасные повстанцы против человечества.
Запад рассматривает роботов как «угрозу» будущему людей, что во многом связано с религиозным влиянием авраамических религий, в которых создание машин, которые могут думать самостоятельно, было бы почти игрой Бога. Очевидно, что эти границы нечеткие, но между двумя идеологиями есть существенная разница.
Законы о роботах
Писатель Исаак Азимов рассказал много историй о роботах, которые обладали тремя законами робототехники, защищающими людей от них.
- Робот не может причинить вред человеку или своим бездействием позволить человеку причинить вред.
- Робот должен подчиняться приказам, отданным ему людьми, за исключением случаев, когда такие приказы противоречат Первому Закону.
- Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
Они не использовались в реальной жизни, когда он их изобрел. Однако в современном мире роботы более сложны, и в один прекрасный день могут потребоваться настоящие законы, похожие на три исходных закона Айзека Азимова.
Об этих законах говорят в видеоиграх Megaman.
Южная Корея была первой страной в мире, в которой были законы о роботах.
Связанные страницы
Детские картинки
Шарнирно-сочлененные сварочные роботы, используемые на заводе, тип промышленного робота.
KITT (вымышленный робот) ментально антропоморфен
ASIMO физически антропоморфен
Аль-Джазари — Музыкальная игрушка
Башня с астрономическими часами Су Сун с механическими фигурками, отбивающими часы.
Торпеда Бреннана, одна из первых «управляемых ракет»
Патент США 2,988,237, выданный в 1961 г. компании Devol.
Сцена из пьесы Карела Чапека «Р.У.Р.» 1920 года. (Универсальные роботы Россума) с изображением трех роботов.
Аппарат для лапароскопической роботизированной хирургии
Робот Pick and Place на заводе
TOPIO, робот-гуманоид, играл в пинг-понг на Токийской международной выставке роботов (IREX) 2009.
Андроид или робот, напоминающий человека, может показаться одним людям утешительным, а другим — тревожным.
Робот общего назначения выполняет роль проводника днем и охранника ночью
Интеллектуальная система AGV для выгрузки товаров без необходимости использования линий или маяков на рабочем месте
Электростатический захват из микропроцессора, удерживающий кремниевые нанопроволоки.
Стая роботов из проекта микророботов с открытым исходным кодом
Игрушечные роботы на выставке в Museo del Objeto del Objeto в Мехико.
Итальянский фильм Механический человек (1921) — первый фильм, в котором показана битва между роботами
Роботы не забирают нашу работу — они становятся нашими боссами
На этапах конференций и во время предвыборных митингов руководители технических компаний и политики предупреждают о надвигающемся кризисе автоматизации — кризисе, когда рабочих постепенно, а затем сразу заменяют интеллектуальными машинами.Но их предупреждения скрывают тот факт, что кризис автоматизации уже наступил. Роботы здесь, они работают в управлении, и они затапливают рабочих в землю.
Роботы следят за горничными в отеле, сообщая им, какую комнату нужно убрать, и отслеживая, как быстро они это делают. Они управляют разработчиками программного обеспечения, отслеживают их клики и прокрутки и фиксируют зарплату, если они работают слишком медленно. Они слушают сотрудников колл-центра, говорят им, что и как сказать, и постоянно заставляют их быть максимально занятыми.В то время как мы постоянно наблюдали за беспилотными грузовиками, через пять лет прибыли роботы в виде начальника, мастера и менеджера среднего звена.
Эти автоматизированные системы могут обнаруживать неэффективность, которую никогда не обнаружил бы человек-менеджер — мгновенный простой между звонками, привычка задерживаться у кофемашины после завершения задачи, новый маршрут, который, если все пойдет идеально, может доставить еще несколько пакетов. за день. Но для рабочих то, что выглядело как неэффективность алгоритма, было их последним резервом передышки и автономии, и по мере того, как эти небольшие перерывы и незначительные свободы оптимизируются, их работа становится все более напряженной, напряженной и опасной.За последние несколько месяцев я поговорил с более чем 20 сотрудниками в шести странах. Для многих из них больше всего опасается не то, что роботы могут прийти на работу: роботы уже стали их боссами.
В некоторых секторах риски автоматизированного управления более очевидны, чем в Amazon. Программное обеспечение управляет почти всеми аспектами управления складами компании: от того, когда люди работают, до того, как быстро они работают, и до случаев, когда их увольняют за отставание.У каждого рабочего есть «ставка», определенное количество предметов, которые они должны обработать в час, и если они не соблюдают ее, они могут быть автоматически уволены.
«Это все равно, что выйти из дома и просто бежать, не останавливаясь ни на что в течение 10 часов подряд, просто бежать».
Когда Джейк * начал работать на складе во Флориде, он был удивлен тем, как мало там было супервайзеров: всего двое или трое управляли персоналом из более чем 300 человек. «Управление было полностью автоматизировано, — сказал он. Один начальник ходил по этажу с ноутбуком в руке и просил рабочих ускориться, когда их ставка упала.(Amazon заявила, что ее система уведомляет менеджеров, чтобы они говорили с работниками об их работе, и что все окончательные решения по кадровым вопросам, включая увольнения, принимаются руководителями.)
Джейк, который попросил использовать псевдоним из-за страха возмездия, был «опекуном». Его работа заключалась в том, чтобы снять предмет с конвейерной ленты, нажать кнопку, поместить предмет в любой отсек, который велит ему монитор, нажать другую кнопку и повторить. Он сравнил это с выполнением скручивающего выпада каждые 10 секунд без остановки, хотя его поощряла двигаться еще быстрее благодаря гигантской таблице лидеров, изображающей мультяшного бегущего человека, которая показывала показатели 10 самых быстрых рабочих в режиме реального времени.Менеджер иногда продолжал болтать спортивного комментатора по внутренней связи: «На третьем месте в первой половине у нас есть Боб со скоростью 697 единиц в час», — вспоминал Джейк. Лучшие исполнители получили валюту Amazon, которую они могли обменять на Amazon Echos и корпоративные футболки. Неэффективные были уволены.
«Ты не остановишься», — сказал Джейк. «Вы буквально не останавливаетесь. Это все равно, что выйти из дома и просто бежать, не останавливаясь ни на что в течение 10 часов подряд, просто бежать ».
Через несколько месяцев он почувствовал жжение в спине.Наблюдатель иногда говорил ему больше сгибать колени при подъеме. Когда Джейк сделал это, его рейтинг упал, и другой начальник посоветовал ему ускориться. «Ты меня разыгрываешь. Идти быстрее?» он вспомнил слова. «Если я пойду быстрее, у меня случится сердечный приступ, и я упаду на пол». Наконец, его спина полностью прогнулась. Ему поставили диагноз: два поврежденных диска, и он стал инвалидом. По его словам, этот показатель был «на 100 процентов» ответственным за его травму.
Каждый работник Amazon, с которым я разговаривал, говорил, что именно автоматически устанавливаемый темп работы, а не физическая сложность самой работы, делает работу такой изнурительной.Любой провал в системе постоянно оптимизируется, а вместе с ним и любая возможность отдохнуть или восстановиться. Рабочий с Западного побережья рассказал мне о новом устройстве, которое проливает свет на предмет, который он должен выбрать, что позволяет Amazon еще больше ускорить скорость и избавиться от того, что рабочий описал как «микро-остатки», украденных в тот момент, когда это потребовалось. искать следующий предмет на полке.
Люди не могут выдержать такой уровень напряженной работы, не сломавшись. В прошлом году ProPublica , BuzzFeed и другие опубликовали исследования о врезании водителей службы доставки Amazon в транспортные средства и пешеходов, когда они пытались завершить свои сложные маршруты, которые генерируются алгоритмически и отслеживаются через приложение на телефонах водителей.В ноябре агентство Reveal проанализировало документы с 23 складов Amazon и обнаружило, что почти 10 процентов штатных сотрудников получили серьезные травмы в 2018 году, что более чем в два раза превышает средний показатель по стране для аналогичной работы. Несколько сотрудников Amazon говорили мне, что повторяющиеся стрессовые травмы являются эпидемией, но о них редко сообщают. (Представитель Amazon сказал, что компания серьезно относится к безопасности рабочих, имеет медицинский персонал на месте и призывает рабочих сообщать обо всех травмах.) свои склады.
Неумолимый стресс берет свое. Джейк вспомнил, как кричал на сотрудников, чтобы те двигались быстрее, только чтобы задаться вопросом, что с ним случилось, и извиниться. К концу смены он будет настолько истощен, что сразу же уснет в своей машине на стоянке склада, прежде чем поехать домой. «Многие люди так поступали», — сказал он. «Они просто лежали в своей машине и засыпали». Рабочий из Миннесоты сказал, что работа была усилена алгоритмически до такой степени, что это потребовало переосмысления давних трудовых норм.«Концепция 40-часовой рабочей недели заключалась в том, что вы работаете восемь часов, вы спите восемь часов и у вас есть восемь часов на все, что вы хотите сделать», — сказал он. «Но [что], если вы приходите домой с работы и сразу ложитесь спать и спите 16 часов, или на следующий день после рабочей недели, весь день вы чувствуете похмелье, вы не можете сосредоточиться на вещах, вы просто чувствуете себя дерьмом, теряете время вне работы из-за ее последствий и стрессовых, тяжелых условий? »
Рабочие неизбежно выгорают, но, поскольку каждая задача ежеминутно продиктована машиной, их легко заменить.Джейк подсчитал, что его наняли вместе с 75 людьми, но что он был единственным оставшимся, когда его спина, наконец, сдалась, а большинство из них перевернулось дважды. «Вы просто номер, они могут заменить вас кем угодно с улицы за две секунды», — сказал он. «Им не нужны никакие навыки. Им ничего не нужно. Все, что им нужно делать, это работать очень быстро ».
На складах Amazon есть роботы, которые якобы крадут работу, но они не такие, которые беспокоят большинство рабочих. В 2014 году Amazon начала развертывать роботов для переноски полок, которые автоматизировали прохождение через склад для получения товаров.Роботы были настолько эффективны, что требовалось больше людей на других ролях, чтобы не отставать, Amazon построила больше объектов, и теперь в компании работает почти в три раза больше рабочих складов, занятых полный рабочий день, чем было, когда роботы были подключены к сети. Но роботы изменили характер работы: вместо того, чтобы ходить по складу, рабочие стояли в клетках, снимая предметы с полок, которые принесли им роботы. Сотрудники говорят, что это одна из самых динамичных и изнурительных ролей на складе. Reveal обнаружил, что травмы чаще случаются на складах с роботами, что имеет смысл, потому что проблема заключается в скорости, а машины, которые больше всего беспокоят рабочих, — это те, которые обеспечивают ее соблюдение.
В прошлом году на предприятиях Amazon прокатилась волна протестов рабочих. Почти все они были вызваны автоматическим управлением, не оставляющим места для удовлетворения основных человеческих потребностей. В Калифорнии работница была автоматически уволена после того, как она превысила свою квоту неоплачиваемого отпуска на один час после смерти члена ее семьи. (Ее снова приняли на работу после того, как ее коллеги подали петицию.) В Миннесоте рабочие ушли с работы в знак протеста против ускорения темпов работы, которое, по их словам, приводило к травмам и не оставляло времени для перерывов в туалетах или религиозных обрядов.Чтобы удовлетворить машину, рабочие чувствовали, что они должны сами стать машинами. Их скандирование: «Мы не роботы».
Каждая промышленная революция — это история как нашей организации работы, так и технологических изобретений. Паровые двигатели и секундомеры существовали на протяжении десятилетий, прежде чем Фредерик Тейлор, оригинальный оптимизатор, использовал их для создания современного завода. Работая на сталелитейном заводе в конце 19 века, он упростил и стандартизировал каждую роль и написал подробные инструкции на карточках; он рассчитывал каждую задачу по секундам и устанавливал оптимальную скорость.Поступая так, он сломил власть квалифицированных ремесленников, сдерживавшуюся темпами производства, и начал эпоху промышленного роста, а также эпоху изнурительной, повторяющейся и опасно ускоряющейся работы.
Генри Форд наиболее полно продемонстрировал силу этого подхода, когда еще больше упростил задачи и расположил их на конвейере. Скорость линии контролировала темп рабочего и давала начальникам простой способ увидеть, кто отстает. Рабочие это абсолютно ненавидели. Работа была настолько бессмысленной и изнурительной, что люди увольнялись толпами, что вынудило Форда удвоить заработную плату.По мере распространения этих методов рабочие часто бастовали или замедляли ход в знак протеста против «ускорения» — надзиратели разгоняли конвейер до неприемлемых темпов.
Мы находимся в разгаре очередного большого ускорения. За этим стоит много факторов, но одним из них является цифровизация экономики и новые способы организации работы, которые она открывает. Возьмем розничную торговлю: рабочие больше не стоят в магазинах в ожидании покупателей; с электронной коммерцией их роли разделены. Кто-то работает на складах, где безостановочно выполняет заказы, а кто-то работает в call-центрах, где отвечает вопрос за вопросом.В обоих помещениях за рабочими ведется пристальное наблюдение. Каждое их действие отслеживается сканерами склада и компьютерами колл-центра, которые предоставляют данные для автоматизированных систем, которые поддерживают их работу с максимальной производительностью.
На самом базовом уровне автоматизированное управление начинается с расписания. Алгоритмы планирования существуют с конца 1990-х годов, когда магазины начали использовать их для прогнозирования покупательского трафика и создания соответствующих ему смен. Эти системы делали то же самое, что и владелец бизнеса, когда планировали меньше рабочих на медленное утро и больше на обеденный перерыв, пытаясь максимизировать продажи в расчете на один рабочий час.Программное обеспечение просто лучше справлялось с этим, и оно продолжало улучшаться, учитывая такие переменные, как погода или близлежащие спортивные соревнования, пока оно не смогло прогнозировать потребность в персонале с 15-минутным шагом.
Ни у кого не бывает затишья
Программа настолько точна, что ее можно использовать для создания гуманных расписаний, сказала Сьюзан Ламберт, профессор Чикагского университета, изучающая нестабильность расписания. Вместо этого он часто используется для координации минимального количества работников, необходимого для удовлетворения прогнозируемого спроса, если не немного меньше.Она отметила, что это даже не обязательно самый прибыльный подход, цитируя проведенное ею исследование Gap: компаниям и инвесторам проще количественно оценить сокращение затрат на рабочую силу, чем потери продаж, потому что покупателям не нравится бродить по заброшенным магазинам. . Но если это плохо для клиентов, то хуже для рабочих, которые вынуждены постоянно участвовать в гонках, чтобы управлять предприятиями, которые постоянно испытывают нехватку кадров.
Хотя они начинались в розничной торговле, сейчас алгоритмы планирования стали повсеместными. Например, на предприятиях, где Amazon сортирует товары перед доставкой, работникам выдают скелетные расписания и приложение опрашивает их, когда появляются дополнительные часы на складе, иногда всего за 30 минут до того, как они понадобятся.В результате ни у кого никогда не бывает затишья.
Появление дешевых датчиков, сетей и машинного обучения позволило автоматизированным системам управления взять на себя более детальную надзорную роль — и не только в структурированных настройках, таких как склады, но и везде, где работники носят свои устройства. Gig-платформы, такие как Uber, были первыми, кто извлек выгоду из этих технологий, но компании по доставке, рестораны и другие отрасли вскоре приняли их методы.
В автоматизированном управлении не было ни единого прорыва, но, как и в случае с секундомером, революционная технология может казаться обыденной, пока не станет основой для нового способа организации работы.Когда программы отслеживания ставок привязаны к складским сканерам или водители такси оснащены приложениями GPS, это позволяет управлять такими масштабами и уровнем детализации, о которых Тейлор мог только мечтать. Было бы непомерно дорого нанять достаточное количество менеджеров, чтобы рассчитывать каждое движение каждого рабочего с точностью до долей секунды или ехать на каждом грузовике, но теперь для этого требуется, может быть, один. Вот почему компании, наиболее агрессивно применяющие эту тактику, принимают схожую форму: большой пул низкооплачиваемых, легко заменяемых, часто частично занятых или контрактных работников; небольшая группа высокооплачиваемых сотрудников, разрабатывающих программное обеспечение для управления ими на высшем уровне.
«Апокалипсис роботов уже наступил».
Это не промышленная революция, о которой нас предупреждали Илон Маск, Марк Цукерберг и другие в Кремниевой долине. Они по-прежнему зациклены на призраке ИИ, крадущего рабочие места, который изображается как нечто принципиально новое и чрезвычайно тревожное — по словам Эндрю Янга, «модная пила», приходящая для общества в том виде, в каком мы его знаем. Апокалиптические видения кажутся исключительно лестными для технологической индустрии, которая в состоянии предупредить мир о собственном успехе, забить тревогу, что она изобрела силы, настолько могущественные, что человеческий труд навсегда останется устаревшим.Но в своей абстракции в масштабе цивилизации этот взгляд упускает из виду способы, которыми технологии меняют опыт работы, и своим чувством неизбежности он подрывает беспокойство многих из тех же людей, которыми сегодня управляют машины. Зачем слишком беспокоиться об условиях для складских рабочих, водителей такси, модераторов контента или представителей колл-центра, когда все говорят, что через несколько лет эти роли будут заменены роботами? Их предложения по политике столь же абстрактны, как и их диагноз, они в основном сводятся к тому, чтобы дать людям деньги, как только за ними придут роботы.
Может быть, когда-нибудь роботы придут к водителям грузовиков и всем остальным, хотя чистое влияние автоматизации на рабочие места до сих пор было менее чем катастрофическим. Технологии, несомненно, лишат людей работы, как это было в прошлом, и стоит подумать о том, как обеспечить им защиту. Но один из вероятных сценариев состоит в том, что эти дальнобойщики не останутся полностью безработными, но, как показывает анализ Центра исследований и образования Калифорнийского университета в Беркли, будут ездить вместе, чтобы помогать в основном автономным транспортным средствам перемещаться по сложным городским улицам, получая более низкую заработную плату в условиях строгого контроля и новые неквалифицированные рабочие места.Или, может быть, они будут в офисах, подобных колл-центру, удаленно устранять неисправности в грузовиках, а их производительность будет отслеживаться с помощью алгоритма. Короче говоря, они обнаружат, что ими управляют машины, подверженные силам, которые росли годами, но в значительной степени игнорируются фетишизмом искусственного интеллекта.
«Апокалипсис роботов уже наступил, — сказала Джоанна Броновицка, исследователь Центра Интернета и прав человека и бывший кандидат в Европарламент. «Просто то, как мы создали эти повествования, и, к сожалению, люди слева и справа, такие как Эндрю Янг и люди в Европе, которые говорят на эту тему, вносят свой вклад в это, они используют язык будущего, который скрывает реальную жизненную реальность людей прямо сейчас.”
Это не означает, что будущее ИИ не должно беспокоить рабочих. Раньше для автоматического управления заданиями их приходилось разбивать на задачи, которые могли измеряться машинами — поездка, отслеживаемая GPS, предмет, сканированный на складе. Но машинное обучение способно анализировать гораздо менее структурированные данные и создает новые формы работы, от набора текста на компьютере до разговоров между людьми, готовых для роботов-боссов.
Анджела * несколько лет проработала в колл-центре по страхованию, прежде чем уволиться в 2015 году.Как и во многих других колл-центрах, работа была напряженной: клиенты часто были в отчаянии, программное обеспечение отслеживало количество и продолжительность ее звонков, а менеджеры иногда подслушивали на линии, чтобы оценить, как она справляется. Но когда она вернулась в индустрию в прошлом году, что-то изменилось. Помимо обычных показателей, появилась новая — эмоция — и ее оценивал ИИ.
Программное обеспечение, с которым столкнулась Анджела, было от Voci, одной из многих компаний, использующих ИИ для оценки сотрудников колл-центров.Другие показатели Анджелы были превосходными, но программа постоянно отмечала ее отрицательные эмоции, что приводило ее в недоумение, потому что ее менеджеры-люди ранее хвалили ее чуткое поведение по телефону. Никто не мог сказать ей, почему именно она была наказана, но ее лучшее предположение заключалось в том, что ИИ интерпретировал ее динамичный и громкий стиль речи, периоды молчания (результат попытки соответствовать метрике, призванной свести к минимуму задержку людей. ), а выражения озабоченности — как отрицательные.
«Это заставляет меня задаться вопросом, является ли это привилегией фальшивой эмпатии, которая звучит по-настоящему бодро и говорит:« О, мне жаль, что вы имеете дело с этим », — сказала Анджела, которая попросила использовать псевдоним из страха возмездия. «Ощущение, что единственный подходящий способ выразить эмоции — это то, как компьютер говорит, это очень ограничивает. Это также кажется не лучшим опытом для клиентов, потому что, если бы они хотели поговорить с компьютером, они бы остались с IVR [интерактивным голосовым ответом].”
Представитель Voci сказал, что компания обучила свою программу машинного обучения на тысячах часов аудио, которые сотрудники краудсорсинга отметили как демонстрирующие положительные или отрицательные эмоции. Он признал, что эти оценки являются субъективными, но сказал, что в совокупности они должны учитывать такие переменные, как тон и акцент. В конечном итоге представитель сказал, что Voci предоставляет инструмент анализа, а центры обработки вызовов решают, как использовать предоставленные данные.
Проблемы Анджелы с Voci заставили ее опасаться следующего раунда автоматизации.Ее колл-центр находился в процессе внедрения программного обеспечения от Clarabridge, которое должно автоматизировать те части оценки звонков, которые все еще выполняются людьми, например, правильные ли фразы произносят агенты. Ее центр также планировал расширить использование Cogito, который использует ИИ для обучения рабочих в режиме реального времени, предлагая им говорить медленнее, с большей энергией или выражать сочувствие.
Когда люди перечисляют вакансии, подлежащие автоматизации, работники колл-центра приходят сразу после водителей грузовиков. Их работа повторяется, а машинное обучение позволило быстро добиться прогресса в распознавании речи.Но машинное обучение борется с узкоспециализированными и уникальными задачами, и часто люди просто хотят поговорить с человеком, поэтому именно управленческие должности становятся автоматизированными. Google, Amazon и множество небольших компаний анонсировали системы искусственного интеллекта, которые прослушивают звонки и обучают сотрудников или автоматически оценивают их работу. Компания CallMiner, например, рекламирует искусственный интеллект, который оценивает профессионализм, вежливость и сочувствие сотрудников, которые в демонстрационном видео измеряются с точностью до долей процента.
Рабочие говорят, что эти системы часто неуклюжи в оценке человеческого взаимодействия. Один работник утверждал, что они могут достичь своих показателей эмпатии, просто много извиняясь. Другой сотрудник страхового call-центра сказал, что искусственный интеллект Cogito, который должен сказать ей, чтобы она выражала сочувствие при обнаружении эмоционального расстройства звонящего, похоже, срабатывает при любых тональных вариациях, даже при смехе. Ее коллеге позвонили на рассмотрение супервайзерам, потому что тревога сочувствия Cogito продолжала срабатывать, но когда они прослушали запись, оказалось, что звонивший смеялся от радости по поводу рождения ребенка.Однако работница была занята заполнением форм и уделяла разговору лишь половину внимания, поэтому она продолжала подчиняться ИИ и говорить «извините», что сильно смущало звонившего.
Cogito заявила, что ее система «очень точна и не часто дает ложные срабатывания», но когда это происходит, поскольку она дополняет, а не заменяет людей, агенты колл-центра имеют возможность использовать собственное суждение, чтобы адаптироваться к ситуации.
По мере распространения этих систем будет важно оценивать их точность и предвзятость, но они также ставят более простой вопрос: почему так много компаний пытаются автоматизировать эмпатию с самого начала? Ответ кроется в том, как автоматизация сделала работу более интенсивной.
В прошлом работники могли обрабатывать сложный или эмоционально напряженный вызов, смешанный с кучей простых вызовов типа «Я забыл свой пароль», но теперь боты справляются с простыми вызовами. «У нас нет простых звонков, чтобы дать им душевное равновесие, которое мы раньше могли им дать», — сказал Ян Джейкобс из исследовательской компании Forrester. Автоматизированные системы также собирают информацию о клиентах и помогают заполнять формы, что упростит работу, за исключением того, что любое время простоя отслеживается и заполняется дополнительными звонками.
У сотрудницы, которая использовала Cogito, например, была всего одна минута для заполнения страховых бланков между звонками и только 30 минут в месяц на перерывы в туалет и личное время, поэтому она обрабатывала звонки за звонками от людей, имеющих дело с неизлечимыми заболеваниями, умирающих родственников, выкидыши и другие травматические события, каждое из которых она должна была пройти менее чем за 12 минут в течение 10 часов в день. «От этого онемеет», — сказала она. Другие работники говорили о хронической тревоге и бессоннице, которые являются результатом нескольких дней, проведенных за эмоционально грубыми разговорами, в то время как, по словам одного работника, «ваш компьютер стоит вам через плечо и произвольно решает, сохраните ли вы свою работу или нет.«Эта форма эмоционального выгорания стала настолько распространенной, что отрасль получила название:« усталость от сочувствия ». Cogito в электронной книге, объясняющей причину своего искусственного интеллекта, сравнивает сотрудников колл-центра с травматологами, потерявшими чувствительность в течение своей смены, отмечая, что качество работы представителей ухудшается после 25 звонков. Решение, как пишет компания, состоит в том, чтобы использовать ИИ для «масштабного сочувствия».
Стало общепринятым мнение, что межличностные навыки, такие как сочувствие, станут одной из ролей, оставленных людям после того, как роботы возьмут верх, и это часто рассматривается как оптимистичное будущее.Но кол-центры показывают, как это легко может стать темным: автоматизация увеличивает сочувствие, требуемое от сотрудников, и автоматизированные системы, используемые для того, чтобы вызвать у них больше сочувствия или, по крайней мере, машиночитаемое приближение к этому. Анджела, работница, борющаяся с Вочи, обеспокоена тем, что, поскольку ИИ используется для противодействия влиянию бесчеловечных условий труда, ее работа станет еще более бесчеловечной.
«Никто не любит звонить в колл-центр», — сказала она. «Тот факт, что я могу привнести сюда человеческий фактор, применить свой собственный стиль, построить с ними отношения и дать им почувствовать, что о них заботятся, — это хорошая часть моей работы.Это то, что придает мне значение, — сказала она. «Но если вы все автоматизируете, вы потеряете гибкость, чтобы иметь человеческую связь».
Мак Рони работал инженером-программистом в Дакке, Бангладеш, когда он увидел в Facebook рекламу компании Crossover Technologies из Остина. Рони нравилась его нынешняя работа, но роль Кроссовера казалась шагом вперед: зарплата была лучше — 15 долларов в час — и в объявлении говорилось, что он может работать, когда захочет, и делать это из дома.
В первый же день ему посоветовали загрузить программу WorkSmart. В видеоролике генеральный директор Crossover Энди Трайба описывает программу как «FitBit для работы». По его словам, современный работник постоянно взаимодействует с облачными приложениями, и это дает огромное количество информации о том, как они проводят свое время, — информации, которую в основном выбрасывают. По его словам, эти данные следует использовать для повышения производительности. Ссылаясь на популярную книгу Кэла Ньюпорта Deep Work, об опасностях отвлечения внимания и многозадачности, он говорит, что программное обеспечение позволит работникам достичь новых уровней сосредоточенности.Tryba отображает серию диаграмм, как дефрагментацию жесткого диска, показывая, как рабочий день меняется от рассеянного отвлечения к твердым блокам непрерывной продуктивности.
WorkSmart, по сути, превратил рабочий день Рони в твердые блоки продуктивности, потому что, если он когда-либо определил, что он недостаточно много работал, ему не заплатили. Программное обеспечение отслеживало его нажатия клавиш, щелчки мыши и приложения, которые он запускал, — все для оценки его производительности. От него также потребовали предоставить программе доступ к своей веб-камере.Каждые 10 минут программа делала наугад три фотографии, чтобы убедиться, что он находится за своим столом. Если бы Рони не было, когда WorkSmart делал снимок, или если бы он определил, что его работа упала ниже определенного порога продуктивности, ему не заплатили бы за этот 10-минутный интервал. Другой человек , который начинал с Рони, отказался предоставить программному обеспечению доступ к веб-камере и потерял работу.
Вскоре Рони понял, что, хотя он работал из дома, его старая офисная работа давала больше свободы.Там он мог выйти на обед или сделать перерыв между задачами. В случае с Кроссовером даже использование туалета в собственном доме требовало скорости и стратегии: он начал следить за тем, чтобы мигал зеленый свет его веб-камеры, прежде чем ринуться в коридор в ванную комнату, надеясь, что успеет закончить вовремя, прежде чем WorkSmart сделает еще один снимок.
Метрики, которых он придерживался, были чрезвычайно требовательными: около 35 000 строк кода в неделю. В конце концов он сообразил, что от него ожидается около 150 нажатий клавиш каждые 10 минут, поэтому, если он остановится, чтобы подумать, и перестанет печатать, 10-минутный фрагмент его временной карты будет отмечен как «бездействует».«Каждую неделю, если он не проработал 40 часов, которые программа считала продуктивной, его могли уволить, поэтому, по его оценкам, он работал дополнительно 10 часов в неделю без оплаты, чтобы компенсировать время, которое программа сделала недействительной. Четыре других нынешних и бывших сотрудника Crossover — один в Латвии, один в Польше, один в Индии и еще один в Бангладеш — сказали, что они должны были сделать то же самое.
«Первое, что вы потеряете, — это социальная жизнь», — сказал Рони. Он перестал встречаться с друзьями, потому что был привязан к своему компьютеру, стремясь достичь своих показателей.«Обычно я не часто выходил на улицу».
Шли месяцы, стресс начал сказываться. Он не мог уснуть. Он не мог слушать музыку во время работы, потому что программное обеспечение считало YouTube непродуктивным и ограничивало его зарплату. По иронии судьбы его работа начала страдать. «Если у вас есть свобода, настоящая настоящая свобода, тогда я могу выдержать максимальное давление, если это необходимо», — сказал он. Но, работая день за днем под таким напряженным давлением, он выгорал, и его продуктивность падала.
Tryba сказал, что компания — это платформа, которая предоставляет предприятиям квалифицированных рабочих, а также инструменты для управления ими; бизнесу решать, использовать ли эти инструменты и как.Он сказал, что люди не должны работать дополнительные часы без оплаты, и что, если WorkSmart помечает табель учета рабочего времени как свободный, работники могут обратиться к своему руководителю с просьбой отменить его. Он сказал, что если рабочим нужен перерыв, они могут сделать паузу и уйти. На вопрос, почему был необходим такой интенсивный мониторинг, он сказал, что будущее за удаленной работой, которая предоставит работникам большую гибкость, но что работодателям потребуется способ привлечь работников к ответственности. Кроме того, собранные данные откроют новые возможности для обучения рабочих тому, как быть более продуктивными.
Crossover — далеко не единственная компания, которая почувствовала возможность оптимизации потоков данных, создаваемых цифровыми работниками. У Microsoft есть программное обеспечение Workplace Analytics, которое использует «цифровой выхлоп», производимый сотрудниками, использующими программы компании, для повышения производительности. В области аналитики рабочей силы полно компаний, которые отслеживают активность настольных компьютеров и обещают выявлять время простоя и сокращать количество сотрудников, а оптимизация становится все более резкой и сосредоточенной на отдельных сотрудниках по мере того, как вы спускаетесь по лестнице доходов.Программа Time Doctor на Staff.com, популярная среди аутсорсинговых компаний, отслеживает производительность в режиме реального времени, предлагает сотрудникам продолжать выполнение задачи, если обнаруживает, что они отвлекаются или бездействуют, и делает скриншоты в стиле кроссовера и фотографии с веб-камеры.
В то время как тщательно продуманные и оптимизированные рабочие места являются меритократичными, меритократия может быть доведена до крайности, цитируя фильм « Гаттака»
Сэм Лессин, бывший вице-президент Facebook, соучредитель компании Fin, описывает правдоподобное видение того, к чему все это приведет.Fin запускался как приложение для личного помощника, а затем переключился на программное обеспечение, которое он использовал для мониторинга и управления рабочими, которые заставляли помощника работать. (Сотрудница описала свой опыт работы с запросами помощников как колл-центр, но с более строгим надзором и отслеживанием времени простоя.) Работа в области знаний в настоящее время томится в доиндустриальном состоянии, написала Лессин в письме во время разворота, и сотрудники часто сидят без дела в офисах, их труд неизмеримо и неэффективен. Лессин пишет, что ожидаемый взрыв производительности от ИИ произойдет не в результате замены этих рабочих, а в результате использования ИИ для измерения и оптимизации их производительности, как это сделал Фредерик Тейлор с фабричными рабочими.За исключением того, что это будет «облачная фабрика», организованный ИИ пул интеллектуальных работников, к которым предприятия могут подключиться, когда им это нужно, во многом как аренда вычислительных мощностей у Amazon Web Services.
«Промышленная революция, по крайней мере в краткосрочной перспективе, явно не пошла на пользу рабочим», — признал Лессин в письме. Облачная фабрика принесет волну глобализации и снижения квалификации. По его словам, в то время как тщательно продуманные и оптимизированные рабочие места являются меритократичными, меритократию можно довести до крайности, сославшись на фильм Gattaca .В конечном итоге эти риски перевешиваются тем фактом, что люди могут специализироваться на том, в чем они лучше всего умеют, работать меньше и смогут делать это более гибко.
Для Рони обещание гибкости Crossover оказалось иллюзией. Через год наблюдение и неослабевающее давление стали слишком сильными, и он ушел. «Я думал, что потерял все», — сказал он. Он бросил свою стабильную офисную работу, потерял связь с друзьями и теперь беспокоился, сможет ли он оплатить свои счета.Но через три месяца он нашел другую работу, одну в старомодном офисе. Заработок был хуже, но он был счастливее. У него был менеджер, который помог ему, когда он застрял. У него были обеденные перерывы, перерывы на отдых и перерывы на чай. «Когда я могу выйти, выпить чаю, повеселиться и отправиться в офис, есть место, где я даже могу поспать. Здесь много свободы ».
Работа всегда означала отказ от некоторой степени свободы. Когда работники устраиваются на работу, они могут согласиться позволить своему начальнику говорить им, как им действовать, как одеваться или где быть в определенное время, и все это считается нормальным.Работодатели действуют как то, что философ Элизабет Андерсон критикует как частные правительства, и люди принимают их использование власти способами, которые казались бы репрессивными, исходящими от государства, потому что, как гласит рассуждение, работники всегда могут уйти. Работники также предоставляют своим работодателям широкие возможности для наблюдения за ними, и это тоже считается в целом нормально, вызывая беспокойство в основном в тех случаях, когда работодатели проникают в частную жизнь работников.
Автоматизированное управление обещает изменить этот расчет.Хотя работодатель всегда имел право следить за вашим рабочим столом в течение дня, это, вероятно, было бы неэффективным использованием его времени. Теперь такое наблюдение не только легко автоматизировать, но и необходимо собирать данные, необходимые для оптимизации работы. Эта логика может показаться непреодолимой для компании, пытающейся снизить затраты, особенно если у нее достаточно большой штат сотрудников, чтобы окупиться незначительное повышение производительности.
Но рабочих, которые терпели абстрактную угрозу слежки, гораздо больше беспокоит, когда эти данные используются для управления каждым их шагом.Рабочий Amazon на Среднем Западе описал мрачное видение будущего. «У нас могут быть алгоритмы, связанные с технологиями, которые непосредственно воздействуют на наши тела и контролируют нашу работу», — сказал он. «Прямо сейчас алгоритм говорит менеджеру кричать на нас. В будущем алгоритм мог бы сообщать шоковому ошейнику… Я засмеялся, и он быстро сказал, что шутил лишь отчасти. В конце концов, Amazon запатентовал браслеты для отслеживания, которые вибрируют, направляя рабочих, а Walmart тестирует ремни, которые отслеживают движения сотрудников склада.«Разве вы не представляете себе будущее, в котором у вас будет свобода выбора между голоданием или работой на складе, — сказал рабочий, — и вы подписываете контракт, в котором соглашаетесь носить что-то подобное, и это сбивает вас с толку, когда вы работаете слишком медленно». и все это во имя повышения вашей эффективности? «Я думаю, что это направление, в котором он может двигаться, если больше людей не будут более сознательными, и не будет больше организованности вокруг того, что на самом деле происходит с нами, как работниками, и того, как общество трансформируется с помощью этой технологии», — сказал он.«Это те вещи, которые не дают мне уснуть по ночам, и о которых я думаю, когда сейчас нахожусь на складе».
Этот рабочий возлагал надежды на профсоюзы и на растущую активность, происходящую на складах Amazon. Для этого есть прецедент. Рабочие отреагировали на ускорение последней промышленной революции организованием, и темп работы стал стандартной частью профсоюзных договоров.
Темп работы — лишь одна из форм более широкого вопроса, который эти технологии заставят нас решать: каков правильный баланс между эффективностью и автономией человека? У нас есть беспрецедентные возможности контролировать и оптимизировать поведение сотрудников до мельчайших деталей.Стоит ли предельное повышение производительности заставлять бесчисленное количество людей испытывать хронический стресс и ограничивать их до такой степени, что они чувствуют себя роботами?
Вы можете представить себе версию этих систем, которая собирает данные о рабочих местах, но она анонимна и агрегирована и используется только для улучшения рабочих процессов и процессов. Такая система могла бы получить часть эффективности, которая делает эти системы привлекательными, избегая при этом индивидуализированного микроменеджмента, который раздражает работников. Конечно, это будет означать отказ от потенциально ценных данных.Это потребует признания того, что иногда имеет смысл вообще не собирать данные как средство сохранения пространства для человеческой автономии.
Глубокая разница, которую может дать даже небольшая степень свободы от оптимизации, была очевидна, когда я разговаривал с рабочим, который недавно уволился со склада Amazon в Стейтен-Айленде, чтобы взять на себя работу по погрузке и разгрузке грузовиков для доставки. У него тоже были сканеры и метрики, но они только измеряли, идет ли его команда в правильном направлении в течение дня, оставляя рабочих определять свои роли и темп.«Это похоже на рай», — сказал он своим коллегам.
.