Чему равен пусковой ток асинхронного двигателя. Пусковой ток
Полный ток нагрузки Ia, подаваемый на двигатель, рассчитывается по следующим формулам:
где
Ia: полный ток (А)
Pn: номинальная мощность (кВт)
U: междуфазное напряжение для 3-фазного двигателя и напряжение между зажимами для 1-фазного двигателя (В). 1-фазные двигатели могут подсоединяться на фазное или линейное напряжение
η: КПД, т.е. выходная мощность (кВт)/ входная мощность (кВт)
cos φ : коэффициент мощности, т.е. входная мощность (кВт)/входная мощность(кВА)
Сверхпереходный ток и уставка защиты
- Пиковое значение сверхпереходного тока может быть крайне высоким. Обычно это значение в 12-15 раз превышает среднеквадратическое номинальное значение Inm. Иногда это значение может в 25 раз превышать значение Inm.
- Выключатели, контакторы и термореле рассчитываются на пуски двигателей при крайне высоких сверхпереходных токах (сверхпереходное пиковое значение может в 19 раз превышать среднеквадратическое номинальное значение Inm).
- При внезапных срабатываниях защиты от сверхтоков при пуске это означает выход пускового тока за нормальные пределы. В результате могут достигаться предельные значения параметров распределительных устройств, срок службы может укорачиваться и даже некоторые устройства могут выходить из строя. Во избежание такой ситуации необходимо рассмотреть вопрос о повышении номинальных параметров распределительных устройств.
- Распределительные устройства рассчитываются на обеспечение защиты пускателей двигателей от КЗ. В зависимости от риска, таблицы показывают комбинации выключателя, контактора и термореле для обеспечения координации типа 1 или 2.
Пусковой ток двигателя
Хотя рынок предлагает двигатели с высоким КПД, на практике их пусковые токи приблизительно такие же, как у стандартных двигателей.
Применение пускателей с соединением треугольником, статических устройств для плавного пуска или регулируемых приводов позволяет снизить значение пускового тока (например, 4 Ia вместо 7,5 Ia).
Компенсация реактивной мощности (квар), подаваемой на асинхронные двигатели
Как правило, по техническим и финансовым соображениям выгоднее снижать ток, подаваемый на асинхронные двигатели. Это может обеспечиваться за счет применения конденсаторов, без влияния на выходную мощность двигателей.
Применение этого принципа для оптимизации работы асинхронных двигателей называется «повышением коэффициента мощности» или «компенсацией реактивной мощности».
Как обсуждается в Главе Компенсация реактивной мощности и фильтрация гармоник , полная мощность (кВА), подаваемая на двигатель, может значительно снижаться путем использования параллельно подключенных конденсаторов. Снижение входной полной мощности означает соответствующее снижение входного тока (так как напряжение остается постоянным).
Компенсация реактивной мощности особенно рекомендуется для двигателей с длительными периодами работы при пониженной мощности.
Как указывается выше,
Поэтому, снижение входной полной мощности (кВА) приводит к увеличению (т.е. улучшению) значения cos φ.
Ток, подаваемый на двигатель, после компенсации реактивной мощности рассчитывается по формуле:
где: cos φ – коэффициент мощности до компенсации, cos φ’ – коэффициент мощности после компенсации, Ia – исходный ток.
Рис. A4 ниже показывает (в зависимости от номинальной мощности двигателя) стандартные значения тока для нескольких значений напряжения питания.
| кВт | л.с. | 230 B | 380 — 415 B | 400 B | 440 — 480 B | 500 B | 690 B |
|---|---|---|---|---|---|---|---|
| A | A | A | A | A | A | ||
| 0,18 0,25 | — — — | 1,0 1,5 1,9 | — — — | 0,6 0,85 1,1 | — — — | 0,48 0,68 0,88 | 0,35 0,49 0,64 |
| — 0,55 — | 1/2 — 3/4 | — 2,6 — | 1,3 — 1,8 | — 1,5 — | 1,1 — 1,6 | — 1,2 — | — 0,87 — |
| — 0,75 1,1 | 1 — — | — 3,3 4,7 | 2,3 — — | — 1,9 2,7 | 2,1 — — | — 1,5 2,2 | — 1,1 1,6 |
| — — 1,5 | 1-1/2 2 | — — 6,3 | 3,3 4,3 — | — — 3,6 | 3,0 3,4 — | — — 2,9 | — — 2,1 |
| 2,2 — 3,0 | — 3 — | 8,5 — 11,3 | — 6,1 — | 4,9 — 6,5 | — 4,8 — | 3,9 — 5,2 | 2,8 — 3,8 |
| 3,7 4 5,5 | — — — | — 15 20 | — 9,7 — | — 8,5 11,5 | — 7,6 — | — 6,8 9,2 | — 4,9 6,7 |
| — — 7,5 | 7-1/2 10 — | — — 27 | 14,0 — | — — 15,5 | 11,0 14,0 — | — — 12,4 | — — 8,9 |
| 11 — — | — 15 20 | 38,0 — — | — 27,0 34,0 |
Кратность пускового тока асинхронного двигателя таблица
Какой ток потребляет двигатель из сети при пуске и работе
В паспорте электрического двигателя указан ток при номинальной нагрузке на валу. Если, например, указано 13,8/8 А, то это означает, что при включении двигателя в сеть 220 В и при номинальной нагрузке ток, потребляемый из сети, будет равен 13,8 А. При включении в сеть 380 В из сети будет потребляться ток 8 А, то есть справедливо равенство мощностей: √ 3 х 380 х 8 = √ 3 х 220 х 13,8.
Зная номинальную мощность двигателя (из паспорта) можно определить его номинальный ток. При включении двигателя в трехфазную сеть 380 В номинальный ток можно посчитать по следующей формуле:
I н = P н/ ( √3 U н х η х с osφ).
где P н — номинальная мощность двигателя в кВт, U н — напряжение в сети, в кВ (0,38 кВ). Коэффициент полезного действия ( η) и коэффициент мощности (с osφ) — паспортные значения двигателя, которые написаны на щитке в виде металлической таблички. См. также — Какие паспортные данные указываются на щитке асинхронного двигателя.
Рис. 1. Паспорт электрического двигателя. Номинальная мощность 1,5 кВ, номинальный ток при напряжении 380 В — 3,4 А.
Если не известны к.п.д. и коэффициент мощности двигателя, например, при отсутствии на двигателе паспорта-таблички, то номинальный его ток с небольшой погрешностью можно определить по соотношению «два ампера на киловатт», т.е. если номинальная мощность двигателя 10 кВт, то потребляемый им ток будет примерно равен 20 А.
Для указанного на рисунке двигателя это соотношение тоже выполняется (3,4 А ≈ 2 х 1,5). Более точные значения токов при использовании данного соотношения получаются при мощностях двигателей от 3 кВт.
При холостом ходе электродвигателя из сети потребляется незначительный ток (ток холостого хода). При увеличении нагрузки увеличивается и потребляемый ток. С увеличением тока повышается нагрев обмоток. Большая перегрузка приводит к тому, что увеличенный ток вызывает перегрей обмоток двигателя, и возникает опасность обугливания изоляции (сгорания электродвигателя).
В момент пуска из сети электрическим двигателем потребляется так называемый пусковой ток. который может быть в 3 — 8 раз больше номинального. Характер изменения тока представлен на графике (рис. 2, а).
Рис. 2. Характер изменения тока, потребляемого двигателем из сети (а), и влияние большого тока на колебания напряжения в сети (б)
Точное значение пускового тока для каждого конкретного двигателя можно определить зная значение кратности пускового тока — I пуск/ I ном. Кратность пускового тока — одна из технических характеристик двигателя, которую можно найти в каталогах. Пусковой ток определяется по следующей формуле: I пуск = I н х ( I пуск/ I ном). Например, при номинальном токе двигателя 20 А и кратности пускового тока — 6, пусковой ток равен 20 х 6 = 120 А.
Знание реальной величины пускового тока нужно для выбора плавких предохранителей, проверке срабатывания электромагнитных расцепителей во время пуска двигателя при выборе автоматических выключателей и для определения величины снижения напряжения в сети при пуске.
Процесс выбора плавких предохранителей подробно рассмотрен в этой статье: Выбор предохранителей для защиты асинхронных электродвигателей
Большой пусковой ток, на который сеть обычно не рассчитана, вызывает значительные снижения напряжения в сети (рис. 2, б).
Если принять сопротивление проводов, идущих от источника до двигателя, равным 0,5 Ом, номинальный ток I н=15 А, а пусковой ток равным пятикратному от номинального, то потери напряжения в проводах в момент пуска составят 0,5 х 75 + 0,5 х 75 = 75 В.
На зажимах двигателя, а также и на зажимах рядом работающих электродвигателей будет 220 — 75 = 145 В. Такое снижение напряжения может вызвать торможение работающих двигателей, что повлечет за собой еще большее увеличение тока в сети и перегорание предохранителей.
В электрических лампах в моменты пуска двигателей уменьшается накал (лампы «мигают»). Поэтому при пуске электродвигателей стремятся уменьшить пусковые токи.
Для уменьшения пускового тока может использоваться схема пуска двигателя с переключением обмоток статора со звезды на треугольник. При этом фазное напряжение уменьшится в √ З раз и соответственно ограничивается пусковой ток. После достижения ротором некоторой скорости обмотки статора переключаются в схему треугольника и напряжение ни них становится равным номинальному. Переключение обычно производится автоматически с использованием реле времени или тока.
Рис. 3. Схема пуска электрического двигателя с переключением обмоток статора со звезды на треугольник
Важно понимать, что не далеко каждый двигатель можно подключать по этой схеме. Наиболее распространенные асинхронные двигатели с рабочим напряжение 380/200 В, в том числе и двигатель, показанный на рисунке 1 при включении по данной схеме выйдут из строя. Подробнее об этом читайте здесь: Выбор схемы соединения фаз электродвигателя
В настоящее время, для уменьшения пускового тока электрических двигателей активно используют специальные микропроцессорные устройства плавного пуска (софт-стартеры). Подробнее о назначении такого типа устройств читайте в статье Для чего нужен плавный пуск асинхронного двигателя.
Статьи и схемы
Полезное для электрика
Пусковой ток двигателя определяется как
где — кратность пускового тока по отношению к номинальному.
Сечение проводов и кабелей до 1 кВ выбираем исходя из условий:
1) по условию нагрева от протекаемого тока
где — поправочный коэффициент на условия прокладки;
2) по условию соответствия аппарату МТЗ (максимальной токовой защиты), установленного в начале линии
где — номинальный ток защитного аппарата, А; — кратность длительного допустимого тока провода по отношению к току срабатывания защиты.
При определении количества проводов, прокладываемых в одной трубе, или жил многожильного проводника, нулевой рабочий проводник, а также заземляющие и нулевые защитные проводники в расчёт не принимаем. Для цеховых электрических сетей принимаем провода и кабели с алюминиевыми жилами, тогда по механической прочности минимальные сечения алюминиевых жил проводов и кабелей внутри помещений не менее 4мм 2 при прокладке на изоляторах, 2,5мм 2 ¾ при других способах прокладки. Проводники с медными жилами применяем во взрывоопасных помещениях классов В1 и В1а, а также в силовых цепях крановых установок. Сечение нулевого и заземляющего провода принимаем равным или большим половины фазного сечения, но не меньше чем того требует механическая прочность.
Приведем пример выбора электродвигателей, пусковых и защитных аппаратов электропривода горизонтально-расточного станка, состоящего из трех двигателей.
1) АИР132М4¾ P=11,0 кВт, h=87,5 %, cosj=0,87, Кп =7,5;
2) АИР112М4¾ Р=5,5 кВт, h=87,5 %, cosj=0,88, Кп =7;
3) АИР80В4¾ Р=1,5 кВт, h=78 %, cosj=0,83, Кп =5,5;
Номинальные токи двигателей по условию (2.10):
Для них по (2.1) выбираем магнитные пускатели:
Согласно (2.2) выберем тепловое реле для первого двигателя
Выбираем тепловое реле типа РТЛ-206104 со средним значением тока теплового реле Iср.т.р. = 27,5 А и номинальным током теплового реле Iном..р. = 80 А.
Для второго электродвигателя
Выбираем тепловое реле типа РТЛ-101604 со средним значением тока теплового реле Iср.т.р. = 12 А и номинальным током теплового реле Iном..р. = 25 А.
Для третьего электродвигателя
Выбираем тепловое реле типа РТЛ-101604 со средним значением тока теплового реле Iср.т.р. =5 А и номинальным током теплового реле Iном..р. = 25 А.
Чтобы определить расчетный ток станка в целом, используем метод определения электрических нагрузок с помощью коэффициента расчетной нагрузки, который будет подробнее изложен далее.
Установленная мощность станка:
По таблице 2.1 для данного станка и .
Эффективное число электроприемников
принимаем при этом по таблицам [метод к курсовому проектированию] .
Тогда расчетная мощность станка
Так как . то принимаем за расчетный ток 21,954 А. Пиковый ток станка определяем по формуле (3.2.5)
По условию (3.2.6) выбираем автоматический выключатель в цепи питания:
· первого электродвигателя станка ВА51Г-25 с . По (3.9)
По (3.2.8) ток срабатывания расцепителя . что удовлетворяет условию (3.2.7): ;
· второго двигателя ВА51Г-25 с . . . . ;
· третьего двигателя ВА51Г-25 с . . . . .
По условию (3.2.3) и (3.2.4) выбираем предохранитель типа ПН2-100/100 для защиты станка: и .
Сечение провода, идущего от рассматриваемого станка к распределительному шкафу, выбираем по условиям (3.2.12) и (3.2.13): и . В итоге выбираем по литературе [4] провод АПВ 5(1´8) с .
Для электропривода с одним двигателем расчёт аналогичен трехдвигательному электроприводу, исключение лишь составляет расчётный ток, который принимаем равным номинальному току двигателя. Все расчеты сводятся в таблицы 3.2.3, 3.2.4, 3.2.5 и 3.2.6.
Таблица 3.2.3- Выбор магнитных пускателей и тепловых реле
Автор: admin Рубрика: Электродвигателя 4 комментария
Расчет тока электродвигателя
 Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей. и когда писал какие бывают номиналы электродвигателей .
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн ),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.

Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике.
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
На этом у меня всё. Пока.
С уважением Александр!
Читайте также статьи:
 Хочешь получать статьи этого блога на почту?
Хочешь получать статьи этого блога на почту?

Что такое пусковой ток, как его посчитать, увидеть и измерить?
Решил разобраться в теме, про которую написано предостаточно, но суть неясна. Вопрос касается пуска электродвигателей, при котором возникает так называемый пусковой ток.
Итак, сразу к делу. Корень проблемы кроется в том, что для запуска электродвигателя (при подаче питания) требуется гораздо большее усилие, чем для продолжения. Эта физика работает со всеми предметами в мире – ведь начать движение всегда труднее, чем продолжить его.
В статье речь пойдёт об асинхронном электродвигателе с короткозамкнутым ротором, который применяется в промышленном оборудовании в 95% случаев. Питание – трехфазное. Как обычно, по тексту буду отсылать к своим статьям, а в конце можно будет скачать много чего интересного по теме.
Пусковой ток и его кратность
Чтобы тронуть с места (пустить) двигатель, нужен громадный пусковой ток (Iп). Громадный – по сравнению с номинальным (рабочим) током Iн на установившейся скорости. В статьях обычно указывают, что пусковой ток превышает рабочий в 5-8 раз. Это число называется “Кратность пускового тока” и обозначается как коэффициент Кп = Iп / Iн.
Пусковой ток – это ток, который потребляет электродвигатель во время пуска. Узнать пусковой ток можно, зная номинальный ток и коэффициент Кп:
Номинальный ток всегда указан на шильдике двигателя:

Номинальный ток двигателя для разных напряжений и схем включения
Кп – рабочий параметр, который указан в характеристиках двигателя, но на корпусе двигателя он никогда не указывается.
Замечу, что не надо путать номинальный и рабочий токи. Номинальный ток – это ток, на котором двигатель может работать продолжительное время, он ограничен только нагревом обмотки статора. Рабочий ток – это реальный ток в данном агрегате, он всегда меньше либо равен номинальному. На практике рабочий ток измеряется токоизмерительными клещами, амперметром или трансформатором тока.
Если рабочий ток больше номинального – жди беды. Читайте мою статью про то, как защитить электродвигатель от перегрузки и перегрева.
Кратность пускового тока . На шильдике его обычно нет, а в документации и на сайтах производителей он присутствует:

Параметры двигателей. Кратность пускового тока
Пример из первой строчки на картинке: конкретный двигатель мощностью 1,5 кВт имеет номинальный ток 3,4 А. Значит, пусковой ток в какой-то момент (сколько длится этот “момент” – рассмотрим ниже) может достигать значения 3,4 х 6,5 = 22,1 А!
Судя по каталогам (их можно будет скачать в конце статьи, как обычно у меня), пусковой ток превышает номинальный в пределах от 3,5 до 8,5 раз.
Кратность пускового тока зависит прежде всего от мощности двигателя и от количества пар полюсов. Чем меньше мощность, тем меньше пусковой ток. А чем меньше пар полюсов (больше номинальные обороты) – тем больше пусковой ток.
То есть, самым большим током при пуске (7 – 8,5 от номинала) обладают высокооборотистые двигатели (3000 об/мин, 2 пары полюсов) сравнительно большой мощности (более 10 кВт).
Так происходит потому, что потребляемый ток и момент инерции при пуске зависит от конструкции двигателя и способа намотки. Мало полюсов – низкое сопротивление обмоток. Низкое сопротивление – большой ток. Кроме того, высокооборотистым движкам для полной раскрутки требуется больше времени, а это опять же тяжелый пуск.
Если объяснить более научным языком, то дело происходит так. Когда двигатель стоит, его степень скольжения S = 1. При раскручивании (или, как любят говорить спецы, разворачивании) S стремится к нулю, но никогда его не достигает – на то двигатель и называют асинхронным, ведь вращение ротора никогда не догонит вращение поля статора из-за потерь. Одновременно сердечник ротора насыщается магнитным полем, увеличивается ЭДС самоиндукции и индукционное сопротивление. А значит, уменьшается ток.
Кому хочется узнать подробнее – в конце статьи я выложил несколько хороших книг по теме.
На самом деле не так всё просто, начинаем копать глубже.
А что там свежего в группе ВК СамЭлектрик.ру?
Подписывайся, и читай статью дальше:
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
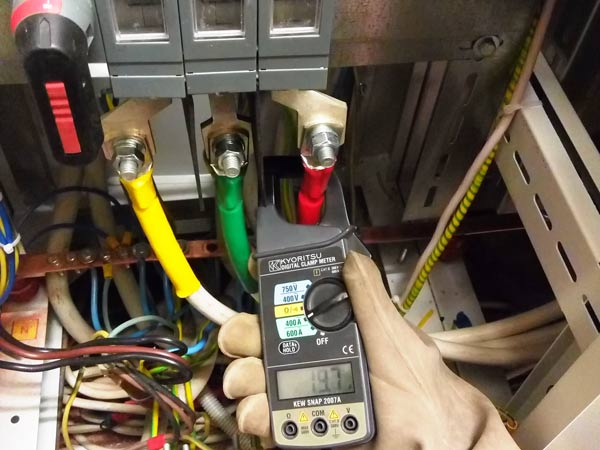
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.

Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –
Какой вред от пускового тока?
Пусковой ток – это проблема. Это –
- перегрузка питающей сети, приводящая к нагреву (вплоть до отгорания контактов) и проседанию напряжения;
- чрезмерный износ, перегрузка и перегрев двигателя, у некоторых производителей среди параметров двигателя указывается максимальное количество пусков в час или в сутки – именно из-за перегрева;
- износ и перегрузка механического привода (подшипники, редукторы, ремни), особенно обладающего большим моментом инерции,
- помехи, вызванные включением контакторов, которые передаются не только по проводам, но и через электромагнитное поле,
- проблемы с технологией – многие процессы нельзя начинать резко.
От пускового тока перегружается всё, и момент пуска становится в тягость вcем участникам процесса. Именно в этот критический момент может проявиться “слабое звено”. Кроме того, многие участники электропитания, работающие в этой сети, испытывают проблемы – например, лампочки снижают яркость из-за снижения напряжения, а контроллеры могут зависнуть из-за мощной помехи.
И в то же время пусковой ток – это проблема, от которой никуда не деться, если сразу подавать на двигатель номинальное питание и не использовать специальные методы.
Как уменьшить пусковой ток асинхронного двигателя
Решить проблему большого пускового тока электрически можно двумя путями:
- Вначале подавать на двигатель пониженное напряжение, а затем, по мере разгона, напряжение и скорость вращения поднять до номинального значения. Такой способ применяется в электронных устройствах запуска двигателей – софтстартерах (УПП) и преобразователях частоты (частотниках).
- Использовать ограничители пускового тока, когда при пуске двигатель питается через мощные резисторы, а потом по таймеру переключается на номинал. Сопротивление резисторов соизмеримо с сопротивлением обмотки стартера (единицы Ом, в зависимости от мощности). Это устройство легко сделать самому (контактор + реле времени).
- Сразу подавать полное напряжение, но сначала подключать обмотки так хитро, чтобы двигатель не раскручивался на полную мощность. И только когда в этом режиме двигатель раскрутится насколько это возможно, включать его на полную. Эта схема называется “Звезда – Треугольник”, читайте в следующей статье.
Можно сконструировать какую-то муфту, коробку передач, вариатор – для того чтобы раскрутить двигатель вхолостую, а потом подключить потребителя механического момента.
В современном оборудовании двигатели мощнее 2,2 кВт практически никогда напрямую не включают, поэтому для них пусковые токи рояли не играют. Для уменьшения пускового тока (и не только) в основном применяют преобразователи частоты, о которых будут отдельные статьи.
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.
Время действия и величина пускового тока
Длительностью пускового тока будем считать время, в течение которого ток понижается от максимума (Iп) до номинала (Iн). Эта длительность фактически равна времени разгона от нуля до номинальной скорости вращения.
Весь вопрос в том, какова длительность этого тока – 10 миллисекунд (пол периода), когда двигатель на холостом ходу, или 10 секунд, когда на валу массивная крыльчатка. Теоретически рассчитать это время невозможно. Однако, поделюсь некоторыми соображениями.
Как я говорил выше, ток двигателя при пуске может превышать норму в несколько раз (Кп). И некоторые начинающие электрики, которые не читают мой блог, считают, что защитный автомат нужно выбирать так же – на повышенный ток. В статьях и даже инструкциях пишут, что “При выборе автомата необходимо учитывать, что пусковой ток асинхронного электродвигателя в 5 – 7 раз превышает номинальный”. Как это учитывать? Неужели ток автомата выбирать в 5-7 раз выше номинального тока двигателя?

Шильдик китайского электродвигателя 30 кВт
Написано – 56 А. Что это значит? Неужели то, что ток защитного автомата должен быть более 300 А? Конечно, нет. И выбор автомата в данном случае зависит не только от номинального тока двигателя (56 А), но и от времени действия пускового тока.
Кстати, давайте проведём расследование и узнаем пусковой ток этого двигателя. Ведь на сайт этого китайского производителя нам попасть не суждено. Исходные номинальные данные: мощность – 30 кВт, момент – 190,9 N·m, ток – 56 А. Смотрим по каталогам отечественных производителей, ищем подобный двигатель, ведь законы физики одинаковы и в России, и в Китае. Находим (каталог в конце статьи): это двигатель на 1500 оборотов, 4 полюса, с кратностью пускового тока Кп = 7. В итоге получаем: Iп = Iн · Кп = 56 · 7 = 392 А. Это теоретический пусковой ток, но это не ток уставки автомата!
Пусковой ток является максимально возможным током. Максимальным ток будет при пуске, то есть тогда, когда двигатель стоит. То есть, пусковой ток есть ВСЕГДА, и всегда его начальное значение имеет запредельную величину. В случае с нашим китайским движком – 392 А, если принять ток КЗ питающей сети равным бесконечности (источник напряжения с нулевым внутренним сопротивлением).
Тепловое действие пускового тока
Если перейти к формулам, пусковой ток оказывает тепловое действие на электродвигатель, которое описывается так называемым интегралом Джоуля. Если по простому, то тепловая энергия, производимая электрическим током, пропорциональна квадрату тока, умноженному на время. Обозначается эта величина через I2t.
Хорошая новость в том, что защитный автомат имеет примерно такую же тепловую (время-токовую) характеристику, что и время-токовая характеристика разгона двигателя.
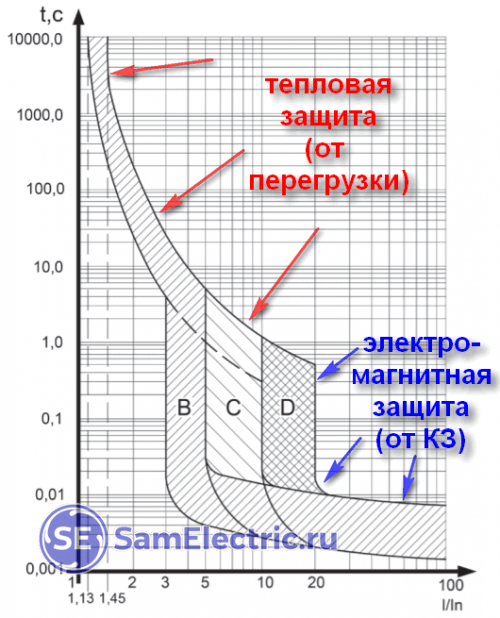
Время-токовые характеристики защитного автомата
Что видим? Для защиты двигателя используются в основном автоматы с характеристикой D, как раз для того, чтобы меньше реагировать на кратковременные перегрузки. Подробнее здесь.
А для пускового тока двигателя график будет примерно такой:
График пускового тока (теоретический) при Кп = 6
Линейность графика – условная. Всё зависит от изменения момента нагрузки в процессе разгона. Теоретический график показан пунктиром. На этом графике Кп = Iп / Iн = 6, но это теоретическое (табличное) значение. Время разгона до номинала = tп.
Реальный график начерчен сплошной линией. На нём Iп` – это реальное значение пускового тока, которое всегда меньше теоретического. Это обусловлено тем, что питающая сеть имеет не нулевое сопротивление, и при повышении тока на проводах возникают потери напряжения.
Про потери на низком напряжении я писал тут, про потери в сетях 0,4 кВ – здесь.
Понятно, что из-за потерь время разгона будет больше, оно обозначено на графике через tп`.
Теперь повернём последний график, чтобы привести оси к одной системе координат:

Время от тока, если можно так выразиться
Не правда ли, весьма похоже на время-токовую характеристику защитного мотор-автомата?
Получается, что обе характеристики компенсируют друг друга, и при выборе автомата достаточно настроить его уставку на номинальный ток двигателя. При особо тяжелых пусках, когда площадь под кривой пуска двигателя больше площади под кривой защитного автомата, стоит подумать о плавном пуске – УПП либо ПЧ.
Реальные измерения тока
Как я говорил выше, по моему мнению лучший способ “увидеть” пусковой ток – использовать активный (резистивный) шунт, и смотреть на нём напряжение осциллографом.
Я использовать вот такой шунт:

Шунт для измерения пускового тока при помощи осциллографа
Подопытный – мотор-редуктор, который через цепную передачу крутит вертикальный шнек:

Мотор-редуктор, на котором измеряем пусковой ток
Шнек на момент пуска был полным, поэтому его рабочий ток (7,7 А, измерено клещами) был почти равен номинальному (8,9 А, видно на шильдике).

Шильдик двигателя вертикального шнека
Ситуация по пусковому току видна на осциллографе:

Осциллограмма пускового тока 500 мс/дел
Приблизим интересующий момент, ускорив развертку до 100 мс/дел:
Осциллограмма пускового тока 100 мс/дел
Тут уже легко увидеть синус питающего тока и оценить коэффициент кратности пускового тока Кп, который примерно равен 4.
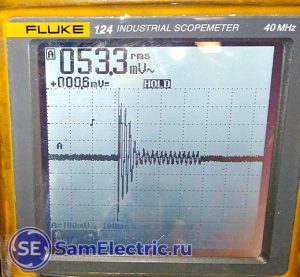
Ещё приблизим момент истины (до 50 мс/дел):

Момент пуска двигателя – ток пуска
Тут уже видны хорошо и переходные процессы, обусловленные индуктивностью и ЭДС самоиндукции обмоток двигателя. Этот импульс, длительность которого гораздо меньше периода сети 20 мс, даёт хорошую помеху с широким спектром в питающую сеть и радиоэфир.
Ещё один повод для использования ПЧ? Не совсем, там с помехами ситуация гораздо хуже!
Скачать
Надеюсь, читатели простят мне вольное объяснение процессов – я постарался всё объяснить “на пальцах”. Кому нужны академические знания, пожалуйста:
• В.Л.Лихачев. Асинхронные электродвигатели. 2002 г. / Книга представляет собой справочник, в котором подробно описано устройство, принцип работы и характеристики асинхронных электродвигателей. Приводятся справочные данные на двигатели прошлых лет выпуска и современные. Описываются электронные пусковые устройства (инверторы), электроприводы., djvu, 3.73 MB, скачан:3274 раз./
• Беспалов, Котеленец – Электрические машины / Рассмотрены трансформаторы и электрические машины, используемые в современной технике. Показана их решающая роль в генерации, распределении, преобразовании и утилизации электрической энергии. Даны основы теории, характеристики, режимы работы, примеры конструкций и применения электрических генераторов, трансформаторов и двигателей., pdf, 16.82 MB, скачан:69 раз./
• Каталог двигателей Электромаш / Асинхронные электродвигатели с короткозамкнутым ротором – каталог производителя, pdf, 3.13 MB, скачан:41 раз./
• Каталог двигателей ВЭМЗ / Параметры и каталог двигателей, pdf, 3.53 MB, скачан:36 раз./
• Дьяков В.И. Типовые расчеты по электрооборудованию / Практические расчеты по электрооборудованию, теоретические сведения, методики расчета, примеры и справочные данные., zip, 1.53 MB, скачан:96 раз./
• Карпов Ф.Ф. Как проверить возможность подключения нескольких двигателей к электрической сети / В брошюре приведен расчет электрической сети на колебание напряжения при пуске и самозапуске асинхронных двигателей с коротко- замкнутым ротором и синхронных двигателей с асинхронным пуском. Рассмотрены условия, при которых допустим пуск и самозапуск двигателей. Изложение методов расчета иллюстрируется числовыми примерами. Брошюра предназначена для квалифицированных электромонтеров в качестве пособия при вы- боре типа электродвигателей, присоединяемых к коммунальной или промышленной электросети., zip, 1.9 MB, скачан:41 раз./
• Руководство по эксплуатации асинхронных двигателей / Настоящее руководство содержит наиболее важные указания по транспортировке, приемке, хранению, монтажу, пусконаладке, эксплуатации, техническому обслуживанию, поиску неисправностей и их устранению для электродвигателей производства «Электромашина». Руководство по эксплуатации предназначено для трехфазных асинхронных электродвигателей низкого и высокого напряжений серий А, АИР, МТН, МТКН, 4МТМ, 4МТКМ, ДА304, А4., pdf, 7.54 MB, скачан:74 раз./
В паспорте электрического двигателя указывается ток при номинальной нагрузке на валу, он меньше пускового тока. Если отмечено 13,8/8 А, то это значит, что при подсоединении двигателя к сети 220 В и номинальной нагрузке ток двигателя будет равен 13,8 А. При подсоединении к сети 380 В – ток 8 А, таким образом верно равенство мощностей: √3 х 380 х 8 = √3 х 220 х 13,8.
Зная номинальную мощность двигателя определяют его номинальный ток. При включении двигателя в трехфазную распредсеть 380 В номинальный ток рассчитывается следующим образом:
Iн = Pн/(√3Uн х сosφ), кА
где Pн – номинальная мощность двигателя, кВт, Uн – напряжение в сети, кВ (0,38 кВ). Коэффициент мощности (сosφ) – паспортные значения двигателя.
Рис. 1. Паспорт электрического двигателя.
Если не известен коэффициент мощности двигателя, то номинальный его ток с малой погрешностью определяется по отношению «два ампера на киловатт», т.е. если номинальная мощность двигателя 10 кВт, то потребляемый им из сети ток будет приблизительно равен 20 А.
Для упомянутого на рисунке двигателя это отношение также выполняется (3,4 А ≈ 2 х 1,5). Более верные величины тока при применении данного отношения получаются при мощностях электродвигателей от 3 кВт.
При холостом ходе электродвигателя из сети потребляется маленький ток (ток холостого хода). При увеличении нагрузки увеличивается и ток. С увеличением тока повышается нагрев обмоток. Большая перегрузка приводит к перегреву обмоток двигателя, и возникает опасность выхода из строя электродвигателя.
При пуске из сети электрическим двигателем потребляется пусковой ток Iпуск, который в 3 – 8 раз выше номинального. Характеристика изменения тока представлена на графике (рис. 2, а).
Рис. 2. Характеристика изменения тока, потребляемого электродвигателем из сети (а), и влияние большого тока на колебания напряжения в сети (б)
Подлинную величину пускового тока для электродвигателя определяют зная величину кратности пускового тока – Iпуск/Iном. Кратность пускового тока – техническая характеристика двигателя, ее известна из каталогов. Пусковой ток рассчитывается согласно формуле: I пуск = Iх. х (Iпуск/Iном).
Понимание истинной величины пускового тока необходимо для подбора плавких предохранителей, проверки включения электромагнитных расцепителей во время пуска двигателя, при подборе автоматических выключателей и для высчитывания величины падения напряжения в сети при пуске.
Большой пусковой ток вызывает значительное падение напряжения в сети (рис. 2, б).
Если взять электросопротивление проводов, проложенных от источника до электродвигателя, равным 0,5 Ом, номинальный ток Iн=15 А, а пусковой ток Iп равным пятикратному от номинального, потери напряжения в проводах во время пуска составят 0,5 х 75 + 0,5 х 75 = 75 В.
На клеммах электродвигателя, а также и на клеммах рядом работающих электродвигателей напряжение будет 220 – 75 = 145 В. Это понижение напряжения вызывает торможение работающих электродвигателей, что влечет за собой еще большее повышение тока в сети и выход из строя предохранителей.
В электрических лампах в моменты запуска электродвигателей уменьшается накал (лампы «мигают»). Поэтому при включении электродвигателей стремятся уменьшить пусковые токи.
Для понижения пускового тока используется схема пуска электродвигателя с переключением обмоток статора со звезды на треугольник.
Рис. 3. Схема пуска электрического электродвигателя с переключением обмоток статора со звезды на треугольник.
Имеет принципиальное значение то, что далеко не каждый двигатель возможно включать по этой схеме. Широко распространенные асинхронные двигатели с рабочим напряжением 220/380 В, в том числе и двигатель, показанный на рисунке 1 при включении по этой схеме выйдут из строя.
Для понижения пускового тока электродвигателей энергично употребляют специальные процессорные устройства плавного пуска (софт-стартеры).
Пусковые токи электрооборудования | Статьи ЦентрЭнергоЭкспертизы
Пользователей электроэнергии не оставляет равнодушными мощность электроприборов, которые окружают нас в повседневности, ведь в конце концов она упирается в возможности нашего кошелька. Суммарную мощность, из указанных в документации на электроприборы цифр мы учитываем при проектировании будущей сети, правда, не всегда принимаем во внимание, что производитель указывает электрические характеристики для оборудования, работающего в номинальном режиме.
В реальных условиях большинство электроприборов превышает номинальные мощности, достигая максимальной нагрузки в момент включения. Происходит это из-за пусковых токов, которые в течение краткого периода времени (от десятых долей до нескольких секунд) превышают номинальный потребляемый ток до 10 раз.
Такими особенностями отличаются электроприборы, имеющие электродвигатели (холодильники, кондиционеры, электронасосы), электронагревательные приборы, использующие ТЭНы. Как ни странно даже обычные лампы накаливания имеют достаточно высокие величины пускового тока от 5 до 13 раз превышающие номинальные значения (недаром практически всегда они перегорают в момент включения).
Природа пусковых токов
Проиллюстрировать причину возникновения пускового тока легко на простом примере. Кто когда-либо катался на велосипеде, знает – больше всего усилий требуют первые повороты педалей, когда велосипед трогается с места, долее при достижении номинальной скорости это делать значительно легче.
Аналогичные процессы происходят при запуске электродвигателя, ведь для преодоления инерции вала мотора и сопряженных с ним механизмов требуется мощное электромагнитное поле, которое действует до набора рабочих оборотов. Оно характеризуется более высокими токами при запуске двигателя, связанными с номинальными значениями при помощи коэффициентов пускового тока (кратностью пускового тока к номинальному значению).
Иная природа пусковых токов у ламп накаливания. Величина сопротивления вольфрамовой нити 100 ваттной лампочки в холодном (выключенном) состоянии составляет 40 Ом, а в накаленном (включенном) – 490 Ом, не удивительно, что ток в момент включения имеет более чем 12 кратное превышение над номинальным током лампы. Аналогичным образом меняется сопротивление нихромовой нити ТЭНа нагревательного электрического прибора.
Чем опасны пусковые токи и методы борьбы с ними
Пусковые токи не только ведут к неоправданному увеличению потребляемой мощности, они несут в себе серьезную опасность для:
- электрической сети в целом путем создания пиковых нагрузок;
- электронике другого электрооборудования, чувствительной к импульсным перепадам напряжения.
Максимальную мощность с учетом величин пусковых токов необходимо учитывать при выборе:
- генераторов резервного питания;
- стабилизаторов напряжения;
- входных автоматов.
Конечно же, можно предположить, что при штатном использовании бытовой аппаратуры пусковые токи различных потребителей по времени не совпадают, однако представьте ситуацию с отключением электроэнергии и последующем ее включением, при всех включенных ранее потребителях.
Выдержит ли суммарный пусковой ток входной автомат?
Не сработает ли защита от перегрузки стабилизатора?
А как поведет себя генератор резервного питания?
При проектировании конкретной электрической сети следует предварительно найти ответы на поставленные вопросы и учитывать их при выборе аппаратуры.
На сегодняшний день существуют различные способы уменьшения пускового тока, особенно это актуально в производственных условиях, где используется масса технологического оборудования, работающего на электродвигателях переменного тока. Среди наиболее популярных можно назвать:
- запуск электрического двигателя на холостом ходу, с последующим подключением нагрузки;
- изменение схемы подключения в момент пуска треугольник-звезда, правда, такой метод имеет ограничения при пуске асинхронных электродвигателей;
- автотрансформаторный запуск позволяет плавно изменять ток до достижения номинальной величины;
- добиваться ограничения стартовых токов путем применения пусковых резисторов.
Отличные результаты показывают устройства плавного запуска (тиристорные, преобразователи частоты, софт-стартеры).
Смотрите также другие статьи :
Замер потребляемой мощности электрооборудования
Иногда возникает необходимость измерения потребляемой мощности, в частности на работе потребность определить суммарную мощность электрооборудования может возникнуть при проектировании резервной сети, в быту при появлении сомнений при оплате счетов за электроэнергию.
Подробнее…Для чего применяется УЗО
Защитным отключением в случае появления дифференциальных токов, равных току утечки занимается устройство защитного отключения (УЗО). При этом контролируемый ток утечки зависит от типа прибора и может начинаться от 10 мА. Устанавливать защитный прибор необходимо последовательно с входным автоматом.
Подробнее…Расчет уставок для цифровых устройств релейной защиты / Статьи и обзоры / Элек.ру
Параметры срабатывания любого устройства релейной защиты должны отвечать требованиям, изложенным ПУЭ [1] (см. главы 3.2, 5.3).
Для правильного выбора уставок срабатывания в руководствах по эксплуатации цифровых устройств релейной защиты, выпускаемых НТЦ «Механотроника», традиционно приводились методики их расчета только для наиболее сложных алгоритмов защиты.
В связи со значительным увеличением количества выпускаемых цифровых устройств и выдвижением новых требований организациями, проводящими аттестацию цифровых устройств для применения их на объектах ОАО «ФСК ЕЭС», в эксплуатационную документацию были введены методики расчета уставок для всех алгоритмов защиты, предусмотренных в цифровых устройствах производства НТЦ «Механотроника».
Для этого предприятие разработало методические указания по расчетам уставок, которые полностью учитывают:
- требования и рекомендации, изложенные в ПУЭ;
- особенности алгоритмов защиты, используемых в цифровых блоках серий БМРЗ и БМРЗ-100.
Разработка методических указаний была выполнена специалистами НТЦ «Механотроника» при участии к.т.н. Соловьёва А.Л., заведующего кафедрой релейной защиты и автоматики электрических станций, сетей и систем Петербургского Энергетического института повышения квалификации.
Настоящая публикация открывает серию статей в которых приведены методики расчета уставок, иллюстрированные практическими примерами.
Расчёт уставок токовой отсечки для электродвигателей
Согласно ПУЭ [1] однорелейная токовая отсечка [1], защищающая от многофазных замыканий, в обязательном порядке должна быть предусмотрена для электродвигателей мощностью менее 2 МВт.
В тех случаях, когда однорелейная токовая отсечка не удовлетворяет требованиям чувствительности, то для защиты электродвигателей мощностью менее 2 МВт можно использовать двухрелейную токовую отсечку.
Сразу необходимо отметить, что однорелейная токовая отсечка, в которой использован сигнал, получаемый как разность токов двух фаз, имеет в  раз худшую чувствительность, чем двухрелейная схема с двумя трансформаторами тока [2].
раз худшую чувствительность, чем двухрелейная схема с двумя трансформаторами тока [2].
ПУЭ рекомендует применять двухрелейную токовую отсечку для защиты электродвигателей мощностью 2 МВт и более, имеющих защиту от однофазных замыканий на землю, действующую на отключение.
Если же защита от однофазных замыканий на землю отсутствует, то для электродвигателей мощностью 2 МВт и более следует применять трехрелейную токовую отсечку с тремя трансформаторами тока.
ПУЭ допускает применять двухрелейную токовую отсечку для защиты электродвигателей мощностью 2 МВт и более, не имеющих защиты от однофазных замыканий на землю. Однако в этом случае необходимо дополнительно предусмотреть защиту от двойных замыканий на землю.
Наиболее просто и полно все требования, изложенные в ПУЭ, реализуются при использовании серийно выпускаемых устройств БМРЗ и БМРЗ-100 предназначенных для защиты синхронных и асинхронных электродвигателей. В ряде исключительных случаев для этих же целей возможно применить устройства БМРЗ и БМРЗ-100 для защиты кабельных и воздушных линий.
Для защиты асинхронных и синхронных электродвигателей используется первая ступень алгоритма максимальной токовой защиты МТЗ с нулевой выдержкой времени.
Упрощенная функциональная схема этого алгоритма приведена на рис. 1.
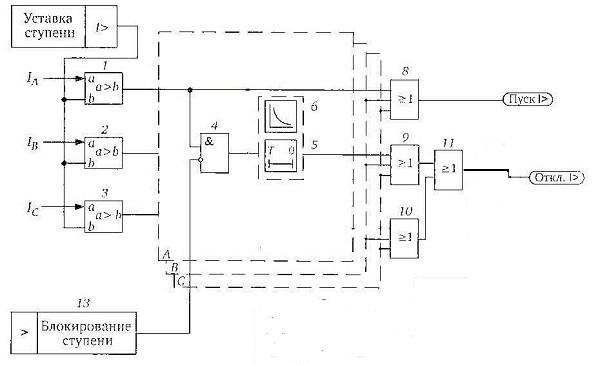
Рис. 1 Схема алгоритма максимальной токовой защиты
(ТО — первая ступень МТЗ) по [4]
При превышении любым из фазных токов IA, IB, IC уставки соответствующего компаратора 1-3 возникает сигнал «Пуск I>» [2] и при отсутствии блокирующих сигналов начинает отсчет времени элемент выдержки времени 5.
При использовании первой ступени МТЗ в качестве токовой отсечки ТО выдержка времени устанавливается равной нулю. Поэтому сигнал «Откл. I >» на выходе алгоритма появляется после сигнала «Пуск I>» без временной задержки.
Блокирование срабатывания любой ступени МТЗ выполняется элементом 4 как внешним сигналом, так и в цикле АПВ. Сигнал блокирования поступает на элемент 13.
В связи с тем, что в данном алгоритме устанавливается нулевое значение выдержки времени, то необходимость ускорения срабатывания алгоритма (при ручном включении выключателя или в цикле АПВ) отсутствует
В устройствах серий БМРЗ и БМРЗ-100 предусмотрено необходимое количество цифровых реле максимального тока для каждой фазы, поэтому применение предусмотренной в ПУЭ отсечки в виде однорелейной схемы на наш взгляд так же нецелесообразно.
Рассмотрение методики расчета уставок для ТО сопровождается практическими примерами, в которых используется асинхронный двухскоростной двигатель АДО-1600/1000-10/12 с прямым пуском на 1-й скорости.
Исходные данные для расчета
Двигатель участвует в процессе самозапуска, который может осуществляться как на 1-ой, так и на 2-ой скорости.
Максимальное сопротивление токовых цепей со стороны питания электродвигателя (проектное значение) — не более 0,5 Ом.
Для расчета уставок токовой отсечки необходимо знать номинальный ток электродвигателя. Если значение этой характеристики не приведено в документации двигателя, определить его можно по формуле (1):
 А
А
(1)
где  — номинальная мощность электродвигателя, кВт;
— номинальная мощность электродвигателя, кВт;  — номинальное линейное действующее напряжение двигателя, кВ;
— номинальное линейное действующее напряжение двигателя, кВ;  — номинальный к.п.д. электродвигателя;
— номинальный к.п.д. электродвигателя;  — номинальный коэффициент мощности электродвигателя.
— номинальный коэффициент мощности электродвигателя.
| Пример |
|---|
1.1 Значение номинального тока для выбранного нами электродвигателя при работе на 1-й скорости согласно формуле (1) будет равно:  А А(1.1) 1.2 Номинальный ток выбранного нами электродвигателя при работе на 2-ой скорости определим также по формуле (1):  А А(1.2) |
По номинальному току электродвигателя необходимо выбрать трансформаторы тока (сигнал с их вторичных обмоток поступает на токовые входы IA, IB, IC цифрового устройства, показанные на рис. 1) с таким коэффициентом трансформации, чтобы при номинальном токе электродвигателя вторичный ток не превышал 5 А. Рекомендуемый диапазон изменения вторичного тока от 1 до 4 А.
| Пример |
|---|
1.3 Для найденного по соотношению (1.1) значения тока (197, 3 А) предварительно выбираем трансформаторы тока ТЛМ10-5-82 с сердечником типа Р и коэффициентом трансформации kтр = 200/5. При кратности тока до 17 и максимальном сопротивлении токовых цепей не более 0,5 Ом трансформаторы тока этого типа имеют погрешность не более 10% [3]. Указанная кратность тока соответствует току в первичной обмотке 3400 А (17×200 А). |
Для оценки пригодности выбранного трансформатора тока по погрешности, соответствующей предельной кратности тока необходимо определить максимальные броски пускового тока электродвигателя (рис. 2)

Рис. 2 Пример пусковой характеристики электродвигателя
Принято считать, что процесс пуска электродвигателя завершен, когда пусковой ток станет меньше 1,25 Iном. дв..
Значение максимального пускового тока при прямом пуске электродвигателя с учетом апериодической составляющей находят по формуле (2):
 А
А
(2)
где  — коэффициент, учитывающий апериодическую составляющую пускового тока машины, принимается 1,8;
— коэффициент, учитывающий апериодическую составляющую пускового тока машины, принимается 1,8;  — кратность пускового тока машины (как правило, 3 ÷ 8
— кратность пускового тока машины (как правило, 3 ÷ 8 ).
).
| Пример |
|---|
1.4. При самозапуске электродвигателя на 1-й скорости максимальный бросок пускового тока согласно формуле (2) составит:  (2-1) 1.5 Максимальный бросок тока самозапуска электродвигателя при его работе на 2-й скорости составит:  (2-2) |
Уставку срабатывания ТО I>>> выбирают такой, чтобы выполнялось соотношение (3):

(3)
| Пример |
|---|
1.6 Используя соотношение (3) выбираем уставки срабатывания алгоритма ТО для первой и второй скоростей одинаковыми и равными |
 .
.При расчете уставок для двигателей с реакторным пуском максимальный бросок пускового тока двигателя при реакторном пуске определяют по формуле (4):
 А
А
(4)
где  — индуктивное сопротивление сети;
— индуктивное сопротивление сети;  — индуктивное сопротивление реактора.
— индуктивное сопротивление реактора.
Значение полного пускового сопротивления двигателя, входящее в формулу (4) находят по соотношению (5)
 Ом
Ом
(5)
Обоснование этой формулы можно найти в работе [5] на стр. 22. Полученное таким образом значение используют в соотношении (3).
Для двигателя, работающего в режиме самозапуска, значение тока  полученное по формулам (2) или (4) необходимо увеличить в 1,3 — 1,4 раза, так как в этом режиме напряжение на двигателе может достигать 1,3- 1,4 номинального значения.
полученное по формулам (2) или (4) необходимо увеличить в 1,3 — 1,4 раза, так как в этом режиме напряжение на двигателе может достигать 1,3- 1,4 номинального значения.
Выбранный ранее трансформатор тока (см. п. 1.3 Примера) проверяем на соблюдение требования, установленного в п.п. в п. 3.2.29 ПУЭ [1]
(1,1I>>>) < (кТ х I ном)
(6)
- Где кТ — кратность тока КЗ при допустимой погрешности 10% .
- I ном — номинальный первичный ток трансформатора тока.
| Пример |
|---|
1.7 Вычисляем (1,1 I >>>1 = 1,1×3350 = 3685) > (17×200 = 3400)(6-1) Из соотношения (6-1) видно, что требование (6) при применении данного трансформатора тока не выполняется. |
В связи с тем, что погрешность выбранного ранее трансформатора тока с коэффициентом трансформации kрт = 200/5 превышает 10% при токе двигателя, превышающем уставку срабатывания на 10% ( ),выбираем трансформаторы тока этого же типа, но с коэффициентом трансформации 300/5.
),выбираем трансформаторы тока этого же типа, но с коэффициентом трансформации 300/5.
Проверим выполнения требования (6) для такого трансформатора.
| Пример |
|---|
1.8 Находим  < 5100 = (17×300) А < 5100 = (17×300) А (6-2) Как видно из соотношения (6-2) при той же допустимой кратности тока 17 погрешность трансформаторов тока не будет превышать 10% даже при токе, равном 5100 А (17Х300А) и максимальном сопротивлении токовых цепей не более 0,5 Ом |
Убедившись в том. что выбранные трансформаторы тока соответствует требованиям, изложенным в ПУЭ, продолжим дальнейшие расчеты.
Значение тока двухфазного КЗ на вводах питания электродвигателя определяем по формуле (7):
 А,
А,
(7)
где  — значение тока трехфазного КЗ на вводах питания электродвигателя (см. выше исходные данные для расчета).
— значение тока трехфазного КЗ на вводах питания электродвигателя (см. выше исходные данные для расчета).
| Пример |
|---|
1.9 Расчетный ток двухфазного КЗ на вводах питания электродвигателя составит:  (7-1) |
Коэффициент чувствительности защиты при двухфазном КЗ находим по формуле (8):

(8)
Данный коэффициент чувствительности представляет собой отношение расчетного значения фазного тока при металлическом КЗ в пределах защищаемой зоны к фазному току, соответствующему срабатыванию защиты.
| Пример |
|---|
1.10 Коэффициент чувствительности защиты при двухфазном КЗ находим по соотношению (8):  (8-1) 1.11 Поскольку коэффициент чувствительности ТО оказался больше 2, нет необходимости применять дополнительно дифференциальную защиту для защиты данного двигателя от междуфазных КЗ. Алгоритм защита от междуфазных КЗ работает без выдержки времени, как и ТО. |
В заключение отметим, что при расчете уставок для синхронного двигателя следует учитывать, что машина запускается в асинхронном режиме, поэтому значение броска пускового тока находят аналогично тому, как это было сделано в приведенных примерах.
Отстройка ТО выполняется от двух параметров:
- броска апериодической составляющей пускового тока;
- тока несинхронного включения двигателя.
Литература
- Правила устройства электроустановок. М.: Госэнергонадзор России, 1998 год, 608 с.
- Александров А.М. Выбор уставок срабатывания защит асинхронных электродвигателей напряжением выше 1 кВ. СПб: ПЭИПК, 2010
- Королев Е.П., Либерзон Э.М. Расчеты допустимых нагрузок в токовых цепях релейной защиты. — М.:«Энергия», 1980/
- Шнеерсон Э.М. Цифровая релейная защита. М.: Энергоатомиздат, 2007, 549 с.
- Корогодский В.И., Кужеков С.Л., Паперно Л.Б. Релейная защита электродвигателей напряжением выше 1 кВ. М.:Энергоатомиздат, 1987
[1] Существует мнение, что этот термин возник потому, что алгоритм токовой отсечки обеспечивает защиту только части объекта, его отсека (см. www.rza001.narod.ru).
[2] По традиции в цифровых устройствах, выпускаемых НТЦ «Механотроника» характеристики первой, второй и третьей ступеней обозначают так: I>>> (первая ступень), I>> (вторая ступень), I> (третья ступень)
Гондуров С.А., Михалев С.В.,
Пирогов М.Г., Захаров О.Г.
НТЦ «Механотроника», С-Петербург
Кратность пускового тока электродвигателя
Подключение и пусковые токи асинхронного двигателя
Приветствую вас, дорогие читатели. Прежде, чем разбираться с методиками подключения и характеристиками токов моторов асинхронного типа, не лишним будет вспомнить о том, что это такое.
Движком асинхронного типа зовут машину особого вида, которая преобразует энергию электричества в механическую. Главным рабочим принципом такого устройства считают вот какие свойства. Проходя по статорным обмоткам, переменный ток, состоящий из трех фаз, создает условия для появления вращающегося магнитного поля. Это поле и заставляет ротор вращаться.
Естественно, что при подключении двигателя надо учитывать все эти факторы, ведь вращение ротора будет производиться в ту сторону, в которую вращается магнитное поле. Частота вращения ротора, однако, ниже частоты вращения возбуждающего поля. По конструкции эти машины бывают самыми различными (то есть предназначенными для работы в разных условиях).
Как рабочие, так и пусковые характеристики таких устройств на много превосходят такие же показатели моторов однофазного типа.
Любой из таких моторов имеет две основные части – подвижную (роторную) и неподвижную (статорную). На обеих частях имеются обмотки. Разница между ними может быть лишь в типе обмотки ротора: она может иметь роторные кольца, либо быть короткозамкнутой. Подключение движков, имеющих короткозамкнутый ротор и мощность до двух сотен киловатт, производится напрямую к сети. Моторы же большей мощности необходимо подключать, сперва, к пониженному напряжению и лишь потом переключать на номинал (с целью снижения в несколько раз пускового тока).
Подключение асинхронного двигателя
Статорная обмотка практически любого такого устройства имеет шесть выводов (из них три – начала и три – концы). В зависимости от того, какова питающая сеть мотора, эти выводы соединяют либо в «звезду», либо в «треугольник». С этой целью корпус каждого мотора имеет коробку, в которой выведены начальные и конечные провода обмоток (они обозначаются, соответственно, С1, С2, С3 и С4, С5, С6).
Подключение звездой
Так называют метод соединения обмоток, при котором все три обмотки имеют одну общую точку (нейтраль). Линейное напряжение такого соединения выше фазного в 1,73 раза. Положительным качеством этого вида соединений считают малые токи пуска, хотя мощностные потери при этом довольно значительны.
Метод соединения в треугольник отличается тем, что при этом методе соединение выполняется таким образом, что конец одной обмотки становится началом следующей.
Подключение треугольником
При этом, соединении фазное и линейное напряжения одинаковы, следовательно, при линейном напряжении в 220 вольт, правильным соединением обмоток будет именно треугольник. Положительной стороной этого соединения является большая мощность, тогда как отрицательной – большие токи пуска.
Для выполнения реверса (смены направления вращения) трехфазного движка асинхронного типа, достаточно поменять местами выводы двух его фаз. На производстве это делается при помощи пары магнитных пускателей с зависимым включением.
Значительные величины токов пуска у асинхронных моторов являются весьма нежелательным явлением, потому как они могут привести к эффекту нехватки напряжения для других видов оборудования, подключенного к той же сети. Это стало причиной того, что подключая и налаживая двигатели этого типа, появляется задача минимизации токов пуска и повышения плавности запуска моторов методом использования специализированного оборудования. Наиболее эффективым типом таких приспособлений считаются софтстартеры и частотные преобразователи. Одним из наиболее ценных их качеств считают то, что они способны поддержать ток запуска мотора довольно долгое время (обычно больше минуты).
Помимо стандартного способа включения моторов асинхронного типа, существуют и методы включения их в питающую сеть, имеющую лишь одну фазу.
Конденсаторный пуск асинхронного двигателя
Для этого, в основном, применяют конденсаторный способ включения. Конденсатор может устанавливаться как один, так и пара (один пусковой, а второй рабочий). Пара кондеров ставится тогда, когда есть надобность в процессе пуска-работы менять емкость, что делают при помощи подключения-отключения одного из кондеров (пускового). Для этого, как правило, применяются емкости бумажного исполнения, поскольку они не имеют полярности, а при работе на переменном токе это очень важно.
Для расчета рабочего конденсатора существует следующая формула:
Ср=4800(i/u).
Пусковой конденсатор должен иметь емкость в пару-тройку раз большую емкости рабочего и рабочее напряжение в полтора раза превышающее напряжение питания.
Пусковой и рабочий конденсаторы соединяют параллельно, причем так, что параллельно пусковому, включено шунтирующее сопротивление и одним концом пусковой кондер включается через ключ. При пуске двигателя ключ замыкают, поднимая ток запуска, затем, размыкают.
Однако, не нужно забывать, что к однофазной сети можно подключить далеко не каждый движок. Кроме того, мощность мотора в таком подключении будет составлять лишь 0.5-0.6 мощности трехфазного включения.
Пусковые токи
Чтобы генератор служил вам как можно дольше, нужно правильно подобрать его мощность. А чтобы правильно подобрать мощность генератора, необходимо не только учесть номинальные мощности всех потребителей электроэнергии в сети, но и их пусковые токи.
Что же это такое? Официальное определение гласит, что это ток, потребляемый из сети электродвигателем при его пуске, который может во много раз превосходить номинальный ток двигателя. На самом же деле такие токи возникают при включении всех электроприборов, просто у большинства из них они длятся всего несколько миллисекунд, тогда как у электродвигателей это время может достигать 7 секунд.
Не будем вдаваться в подробности изложения причин возникновения пусковых токов. Проведем простую аналогию — каждый автомобилист знает, что при разгоне автомобиль потребляет больше топлива, чем во время движения по трассе с постоянной скоростью. Так же и электродвигатель потребляет больше электричества в момент «разгона». Часто пусковые токи производители ограничивают тем или иным способом, например, с помощью пусковых сопротивлений. Это снижает кратность превышения номинального значения мощности, но увеличивает длительность импульса.
В таблице, приведенной ниже, указаны примерные значения кратности и продолжительности пусковых токов для разных типов потребителей энергии.
| Потребитель | Кратность пускового тока | Длительность импульса пускового тока (cек) |
|---|---|---|
| Лампы накаливания | 5 — 13 | 0,05 — 0,3 |
| Электронагревательные приборы из сплавов: нихром, фехраль, хромаль | 1,05 — 1,1 | 0,5 — 30 |
| Люминесцентные лампы с пусковыми устройствами | 1,05 — 1,1 | 0,1 — 0,5 |
| Компьютеры, мониторы, телевизоры и другие приборы с выпрямителем на входе блока питания | 5 — 10 | 0,25 — 0,5 |
| Бытовая электроника, офисная техника и другие приборы с трансформатором на входе блока питания | до 3 | 0,25 — 0,5 |
| Устройства с электродвигателями асинхронного типа, холодильники, насосы, кондиционеры и т.п. | 3 — 7 | 1 — 7 |
Как мы видим из таблицы, пусковым током лампочки запросто можно пренебречь, в то время как про холодильник или кондиционер забывать никак нельзя.
Некоторые электростанции способны выдерживать 5- и даже 7-кратные перегрузки в течение нескольких секунд, однако все равно это не лучшим образом скажется на их сроке службы. Всегда учитывайте запас мощности при выборе электростанции.
Расчет тока электродвигателя
 Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.

Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Подписка на рассылку
Ток, который нужен для запуска электродвигателя, называется пусковым. Как правило, пусковые токи электродвигателей в несколько раз большие, чем токи, необходимые для работы в нормально-устойчивом режиме.
Рисунок 1. Асинхронный электродвигатель Большой пусковой ток асинхронного электродвигателя необходим для того, чтобы раскрутить ротор с места, для чего требуется приложить гораздо больше энергии, чем для дальнейшего поддержания постоянного числа его оборотов. Стоит отметить, что, несмотря на совсем другой принцип действия, однофазные двигатели постоянного тока также характеризуются большими значениями пусковых токов.
Высокие пусковые токи электродвигателей — нежелательное явление, поскольку они могут приводить к кратковременной нехватке энергии для другого подключенного к сети оборудования (падению напряжения). Поэтому при подключении и наладке двигателей переменного тока (наиболее распространенных в промышленности) всегда стоит задача минимизировать значения пусковых токов, а также повысить плавность пуска двигателя за счет применения специального дополнительного оборудования. Такие мероприятия также позволяют снизить уровень затрат на пуск электродвигателя (применять провода меньшего сечения, стабилизаторы и дизельные электростанции меньшей мощности, проч.).
Одной из наиболее эффективных категорий устройств, облегчающих тяжелые условия пуска, являются софтстартеры и частотные преобразователи. Особенно ценным считается их свойство поддерживать пусковой ток двигателей переменного тока в течение продолжительного периода — более минуты. Также пусковой ток асинхронного электродвигателя можно уменьшить за счет внедрения внешнего сопротивления в обмотку ротора.
Расчет пускового тока асинхронного электродвигателя
Рисунок 2. Асинхронный электродвигатель с частотным преобразователем Расчет пускового тока электродвигателя может потребоваться для того, чтобы подобрать подходящие автоматические выключатели, способные защитить линию включения данного электродвигателя, а также для того, чтобы подобрать подходящее по параметрам дополнительное оборудование (генераторы, проч.).
Расчет пускового тока электродвигателя осуществляется в несколько этапов:
Определение номинального тока трехфазного электродвигателя переменного тока согласно формуле: Iн=1000Pн/(Uн*cosφ*√ηн). Рн здесь — номинальная мощность двигателя, Uн выступает номинальным напряжением, а ηн — номинальным коэффициентом полезного действия. Cosφ — это номинальный коэффициент мощности электромотора. Все эти данные можно найти в технической документации по двигателю.
Расчет величины пускового тока по формуле Iпуск=Iн*Кпуск. Здесь Iн — номинальная величина тока, а Кпуск выступает кратностью постоянного тока к номинальному значению, которая также должна указываться в технической документации к электродвигателю.
Точно зная пусковые токи электродвигателей, можно правильно подобрать автоматические выключатели, которые будут защищать линию включения.
Iн = Pн/(√3Uн х сosφ), кА
где Pн — номинальная мощность двигателя, кВт, Uн — напряжение в сети, кВ (0,38 кВ). Коэффициент мощности (сosφ) — паспортные значения двигателя.
Рис. 1. Паспорт электрического двигателя.
Если не известен коэффициент мощности двигателя, то номинальный его ток с малой погрешностью определяется по отношению «два ампера на киловатт», т.е. если номинальная мощность двигателя 10 кВт, то потребляемый им из сети ток будет приблизительно равен 20 А.
Для упомянутого на рисунке двигателя это отношение также выполняется (3,4 А ≈ 2 х 1,5). Более верные величины тока при применении данного отношения получаются при мощностях электродвигателей от 3 кВт.
При холостом ходе электродвигателя из сети потребляется маленький ток (ток холостого хода). При увеличении нагрузки увеличивается и ток. С увеличением тока повышается нагрев обмоток. Большая перегрузка приводит к перегреву обмоток двигателя, и возникает опасность выхода из строя электродвигателя.
При пуске из сети электрическим двигателем потребляется пусковой ток Iпуск, который в 3 — 8 раз выше номинального. Характеристика изменения тока представлена на графике (рис. 2, а).
Рис. 2. Характеристика изменения тока, потребляемого электродвигателем из сети (а), и влияние большого тока на колебания напряжения в сети (б)
Подлинную величину пускового тока для электродвигателя определяют зная величину кратности пускового тока — Iпуск/Iном. Кратность пускового тока — техническая характеристика двигателя, ее известна из каталогов. Пусковой ток рассчитывается согласно формуле: I пуск = Iх. х (Iпуск/Iном).
Понимание истинной величины пускового тока необходимо для подбора плавких предохранителей, проверки включения электромагнитных расцепителей во время пуска двигателя, при подборе автоматических выключателей и для высчитывания величины падения напряжения в сети при пуске.
Большой пусковой ток вызывает значительное падение напряжения в сети (рис. 2, б).
Если взять электросопротивление проводов, проложенных от источника до электродвигателя, равным 0,5 Ом, номинальный ток Iн=15 А, а пусковой ток Iп равным пятикратному от номинального, потери напряжения в проводах во время пуска составят 0,5 х 75 + 0,5 х 75 = 75 В.
На клеммах электродвигателя, а также и на клеммах рядом работающих электродвигателей напряжение будет 220 — 75 = 145 В. Это понижение напряжения вызывает торможение работающих электродвигателей, что влечет за собой еще большее повышение тока в сети и выход из строя предохранителей.
В электрических лампах в моменты запуска электродвигателей уменьшается накал (лампы «мигают»). Поэтому при включении электродвигателей стремятся уменьшить пусковые токи .
Для понижения пускового тока используется схема пуска электродвигателя с переключением обмоток статора со звезды на треугольник.
Рис. 3. Схема пуска электрического электродвигателя с переключением обмоток статора со звезды на треугольник.
Имеет принципиальное значение то, что далеко не каждый двигатель возможно включать по этой схеме. Широко распространенные асинхронные двигатели с рабочим напряжением 220/380 В, в том числе и двигатель, показанный на рисунке 1 при включении по этой схеме выйдут из строя.
Для понижения пускового тока электродвигателей энергично употребляют специальные процессорные устройства плавного пуска (софт-стартеры).
Какой ток потребляет двигатель из сети при пуске и работе
В паспорте электрического двигателя указан ток при номинальной нагрузке на валу. Если, например, указано 13,8/8 А, то это означает, что при включении двигателя в сеть 220 В и при номинальной нагрузке ток, потребляемый из сети, будет равен 13,8 А. При включении в сеть 380 В из сети будет потребляться ток 8 А, то есть справедливо равенство мощностей: √ 3 х 380 х 8 = √ 3 х 220 х 13,8.
Зная номинальную мощность двигателя (из паспорта) можно определить его номинальный ток. При включении двигателя в трехфазную сеть 380 В номинальный ток можно посчитать по следующей формуле:
I н = P н/ ( √3 U н х η х с osφ).
где P н — номинальная мощность двигателя в кВт, U н — напряжение в сети, в кВ (0,38 кВ). Коэффициент полезного действия ( η) и коэффициент мощности (с osφ) — паспортные значения двигателя, которые написаны на щитке в виде металлической таблички. См. также — Какие паспортные данные указываются на щитке асинхронного двигателя.

Рис. 1. Паспорт электрического двигателя. Номинальная мощность 1,5 кВ, номинальный ток при напряжении 380 В — 3,4 А.
Если не известны к.п.д. и коэффициент мощности двигателя, например, при отсутствии на двигателе паспорта-таблички, то номинальный его ток с небольшой погрешностью можно определить по соотношению «два ампера на киловатт», т.е. если номинальная мощность двигателя 10 кВт, то потребляемый им ток будет примерно равен 20 А.
Для указанного на рисунке двигателя это соотношение тоже выполняется (3,4 А ≈ 2 х 1,5). Более точные значения токов при использовании данного соотношения получаются при мощностях двигателей от 3 кВт.
При холостом ходе электродвигателя из сети потребляется незначительный ток (ток холостого хода). При увеличении нагрузки увеличивается и потребляемый ток. С увеличением тока повышается нагрев обмоток. Большая перегрузка приводит к тому, что увеличенный ток вызывает перегрей обмоток двигателя, и возникает опасность обугливания изоляции (сгорания электродвигателя).
В момент пуска из сети электрическим двигателем потребляется так называемый пусковой ток. который может быть в 3 — 8 раз больше номинального. Характер изменения тока представлен на графике (рис. 2, а).
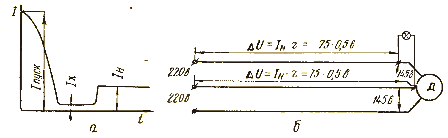
Рис. 2. Характер изменения тока, потребляемого двигателем из сети (а), и влияние большого тока на колебания напряжения в сети (б)
Точное значение пускового тока для каждого конкретного двигателя можно определить зная значение кратности пускового тока — I пуск/ I ном. Кратность пускового тока — одна из технических характеристик двигателя, которую можно найти в каталогах. Пусковой ток определяется по следующей формуле: I пуск = I н х ( I пуск/ I ном). Например, при номинальном токе двигателя 20 А и кратности пускового тока — 6, пусковой ток равен 20 х 6 = 120 А.
Знание реальной величины пускового тока нужно для выбора плавких предохранителей, проверке срабатывания электромагнитных расцепителей во время пуска двигателя при выборе автоматических выключателей и для определения величины снижения напряжения в сети при пуске.
Процесс выбора плавких предохранителей подробно рассмотрен в этой статье: Выбор предохранителей для защиты асинхронных электродвигателей
Большой пусковой ток, на который сеть обычно не рассчитана, вызывает значительные снижения напряжения в сети (рис. 2, б).
Если принять сопротивление проводов, идущих от источника до двигателя, равным 0,5 Ом, номинальный ток I н=15 А, а пусковой ток равным пятикратному от номинального, то потери напряжения в проводах в момент пуска составят 0,5 х 75 + 0,5 х 75 = 75 В.
На зажимах двигателя, а также и на зажимах рядом работающих электродвигателей будет 220 — 75 = 145 В. Такое снижение напряжения может вызвать торможение работающих двигателей, что повлечет за собой еще большее увеличение тока в сети и перегорание предохранителей.
В электрических лампах в моменты пуска двигателей уменьшается накал (лампы «мигают»). Поэтому при пуске электродвигателей стремятся уменьшить пусковые токи.
Для уменьшения пускового тока может использоваться схема пуска двигателя с переключением обмоток статора со звезды на треугольник. При этом фазное напряжение уменьшится в √ З раз и соответственно ограничивается пусковой ток. После достижения ротором некоторой скорости обмотки статора переключаются в схему треугольника и напряжение ни них становится равным номинальному. Переключение обычно производится автоматически с использованием реле времени или тока.
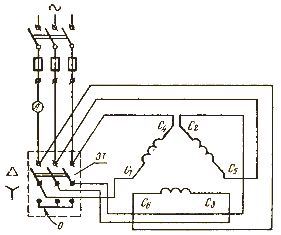
Рис. 3. Схема пуска электрического двигателя с переключением обмоток статора со звезды на треугольник
Важно понимать, что не далеко каждый двигатель можно подключать по этой схеме. Наиболее распространенные асинхронные двигатели с рабочим напряжение 380/200 В, в том числе и двигатель, показанный на рисунке 1 при включении по данной схеме выйдут из строя. Подробнее об этом читайте здесь: Выбор схемы соединения фаз электродвигателя
В настоящее время, для уменьшения пускового тока электрических двигателей активно используют специальные микропроцессорные устройства плавного пуска (софт-стартеры). Подробнее о назначении такого типа устройств читайте в статье Для чего нужен плавный пуск асинхронного двигателя.
>Полезное для электрика
Пусковые токи асинхронных электродвигателей — ООО «СЗЭМО Электродвигатель»
Пусковым называется ток, необходимый для осуществления запуска электрического двигателя. Пусковые токи асинхронных электродвигателей обычно в несколько раз превышают показатели, достаточные для работы в нормальном режиме.
Пусковые токи асинхронных электродвигателей
Двигатели асинхронного типа в момент подключения к электросети потребляют значительное количество энергии для того, чтобы:
- привести ротор в движение;
- поднять скорость вращения с нуля до рабочего уровня.
Этим объясняется необходимость использования большого пускового тока, который существенно отличается от количества электроэнергии, позволяющего поддерживать постоянное число оборотов. Это характерно не только для асинхронных, но и для однофазных двигателей постоянного тока, хотя принцип действия последних совершенно иной.
Проблема высоких пусковых токов: решение
Высокий пусковой ток может спровоцировать резкое, хотя и кратковременное падение напряжения, при котором прочие подключенные к сети устройства испытают недостаток энергии. Это нежелательно, поскольку негативно влияет на безопасность работы и долговечность оборудования.
Для решения задачи предусмотрены специальные дополнительные устройства, установка которых в процессе подключения и наладки двигателей позволяет:
- максимально уменьшить значение пускового тока;
- повысить плавность запуска;
- снизить затраты на запуск агрегата, так как становится возможным применение менее мощных дизельных электростанций, стабилизаторов, проводов с меньшим сечением и пр.
Наибольшей эффективностью отличаются такие современные устройства, как частотные преобразователи и софтстартеры. Они обеспечивают высокую (более минуты) продолжительность поддержания пускового тока.
Как рассчитать пусковой ток электродвигателя
Чтобы объективно оценить сложность условий запуска двигателя, необходимо предварительно узнать величину необходимого для этого пускового тока. Основные этапы расчета следующие:
- вычисление номинального тока;
- определение значения пускового тока (в амперах).
Для того чтобы получить значение номинального тока для используемой модели электродвигателя, применяют формулу, которая имеет вид Iн=1000Pн / (Uн*cosφ*√ηн). Pн и Uн – это номинальные показатели мощности и напряжения, cosφ и ηн – номинальные коэффициенты мощности и полезного действия.
Собственно пусковой ток, который обозначается как Iп, определяется при помощи формулы Iп = Iн * Kп, где Kп – это кратность постоянного тока по отношению к его номинальному значению (Iн). Всю необходимую для проведения расчетов информацию (значения Kп, Pн, ηн, cosφ, Uн) можно найти в технической документации, которая прилагается к электродвигателю.
Корректный расчет пускового тока двигателя способствует правильному выбору автоматических выключателей, предназначенных для защиты линии включения, а также приобретению дополнительного оборудования (генераторы и пр.) с подходящими параметрами.
Пусковые режимы асинхронных электродвигателей — Zetsila
Момент начала питания электродвигателя напряжением сети сопровождается высоким пусковым током. Поэтому, если участок линии электропередачи относительно слаб, фиксируется снижение напряжения, что оказывает влияние на работу рецептора. Падение напряжения может достигать значительных величин, что также сказывается на функциональности систем освещения. Исключить подобные явления призваны отраслевые правила, которыми запрещается пуск электродвигателей в режиме непосредственного старта, если оборудование выходит за пределы заданной мощности. Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
СОДЕРЖИМОЕ ПУБЛИКАЦИИ :
Режимы запуска электрических моторов
Существуют и применяются на практике несколько разных режимов пуска асинхронных электродвигателей. Каждый имеет свои плюсы и минусы в зависимости от технических характеристик моторов и нагрузки.
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Прямой пуск свободно вращающегося мотора
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
КОНТАКТОР
 Схема прямого запуска: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент старта
Схема прямого запуска: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент стартаКогда имеет место момент включения, электрический мотор, в данном случае, работает подобно вторичной обмотке трансформатора, образованной короткозамкнутым ротором, имеющей крайне малое сопротивление.
На роторе формируется высокий индуцированный ток, превышающий в 5-8 раз номинальный параметр, за счёт чего возрастает пиковый ток в сети питания. Среднее значение пускового момента при этом составляет 0,5-1,5 от номинала.
Несмотря на явные преимущества (простая схема, высокий пусковой момент, быстрый старт, экономия), режим прямого пуска асинхронных моторов видится разумным лишь в следующих обстоятельствах:
- мощность электродвигателя низка по сравнению с мощностью сети и не создаёт помехи от пускового тока;
- привод не нуждается в плавном разгоне или имеет демпфирующее устройство, ограничивающее удар при запуске,
- пусковой момент не влияет на работу ведомой машины или нагрузку, приводимую в движение.
Режим пуска с переключением «звезда-треугольник»
Вариант с переключением схемы обмоток применим только на электродвигателях, где начальные и конечные проводники всех трёх обмоток статора выведены на клеммы БРНО. Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
СТАРТЕРНЫЕ
 Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — мотор
Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — моторНапример, для 3-фазной линейной сети 380В подойдёт электродвигатель с параметрами обмотки 380В – «треугольник» и 660В — «звезда».
Принцип режима пуска асинхронного электродвигателя, для этого варианта заключается в запуске мотора звездообразным подключением обмотки к сетевому трёхфазному напряжению.
Здесь теоретически номинальное напряжение «звезды» электродвигателя делится на корень квадратный из 3 (380В = 660В / √3). Пик пускового тока также делится на 3 и составит:
ПТ = 1,5 — 2,6 НТ (номинальный ток)
Электродвигатель с обмоткой под напряжения 380В / 660В, под номинальное напряжение 660В, потребляет меньше тока в 3,3 раза, чем на соединении «треугольник» при напряжении 380В.
В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз.
Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
ПМ = 0.2 — 0.5 НПМ (номинальный пусковой момент)
Скорость электродвигателя стабилизируется при балансировке и резистивных крутящих моментах, как правило, на уровне 75-85% от номинальной скорости.
Затем обмотки соединяются «треугольником», после чего электродвигатель восстанавливает рабочие характеристики. Переход от соединения «звезда» на соединение «треугольник», как правило, контролируется таймером.
Контактор «треугольника» закрывается спустя 30-50 миллисекунд после открытия контактора «звезды». Этой последовательностью предотвращается короткое замыкание между фазами.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника».
В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.
Каким моторам нужен пуск «звезда – треугольник»?
Режим пуска «звезда – треугольник» подходит для машин с низким резистивным крутящим моментом или когда запуск выполняется без нагрузки.
Для ограничения переходных явлений выше определенного уровня мощности, могут потребоваться дополнительные меры. Например, 1-2-секундная задержка на сдвиг от «звезды» к «треугольнику».
Применение такой задержки по времени способствует ослаблению противоэлектродвижущей силы. Следовательно, уменьшается пиковая составляющая переходного тока.
Однако задержка рекомендуется только в том случае, когда машина имеет достаточную инерцию. Иначе время задержки значительного снижает скорость вращения.
Также применим другой вариант – трёхступенчатый, где выполняется последовательность:
- Соединение «звезда-треугольник».
- Подключение сопротивления.
- Соединение «треугольник».
Разрыв по-прежнему имеет место, но резистор, включенный последовательно с обмотками подключенными «треугольником» в течение примерно трех секунд понижает переходный ток. Так предотвращается нарушение течения тока и образование переходных негативных явлений.
Режим запуска с питанием части обмотки
Подобный вариант режима пуска асинхронного электродвигателя — редкость для России и Европы. Эта схема распространена на североамериканском континенте (для моторов напряжением 230/460В).
ТАЙМЕР-РЕЛЕ
 Схема старта путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмотки
Схема старта путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмоткиТакие двигатели имеют обмотку статора, разделенную на две параллельные обмотки, с выводом шести или двенадцати концевых проводников. Этот вариант, по сути, эквивалентен двум «половинным моторам» равной мощности.
В режиме запуска один «половинный двигатель» подключается непосредственно к полному напряжению сети. Пусковой ток и крутящий момент делятся примерно на два.
Крутящий момент, однако, существенно больше, чем для электродвигателя с короткозамкнутым ротором равной мощности в режиме пуска «звезда-треугольник».
Конечным этапом режима пуска становится подключение к сети второй обмотки. В этот момент, текущий пиковый ток отмечается низким уровнем и протекает кратковременно, потому что электродвигатель не отключается от сети и уже частично раскручен.
Резистивно-статорный режим пуска
Применение резистивно-статорного режима пуска электродвигателя отмечается пониженным напряжением. Причина понижения — резисторы, включенные последовательно с обмотками статора.
Когда скорость вращения ротора стабилизируется, резисторы отключаются, а статор электродвигателя подключается непосредственно к сети. Как правило, схема выстроена с участием таймера.
Этот режим пуска асинхронных электродвигателей не изменяет соединения статорных обмоток. Поэтому не требуется, чтобы на клеммы колодки БРНО выводились все концевые проводники обмотки.
ТЕПЛОВОЕ
 Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый мотор
Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый моторЗначение сопротивления рассчитывается в соответствии с максимальным пиковым током при пуске или минимальным пусковым моментом, необходимым для крутящего момента привода машины. Значения пускового тока и крутящего момента следующие:
ПТ = 4.5 НТ
ПМ = 0,75 НПМ
На этапе ускорения с резисторами, приложенное на клеммах электродвигателя напряжение не является полным, а равно разнице, полученной от величины напряжения сети, минус падение напряжения на сопротивлении.
Падение напряжения пропорционально току потребления электродвигателя. Поскольку ток снижается по мере ускорения вращения ротора мотора, то же самое происходит и при падении напряжения на сопротивлении.
Поэтому напряжение, приложенное на клеммы асинхронного электродвигателя, находится на самом низком уровне при запуске, а затем постепенно увеличивается.
Поскольку крутящий момент пропорционален квадрату напряжения на клеммах мотора, этот момент увеличивается быстрее, чем при пуске в режиме «звезда-треугольник», где напряжение остается постоянным на всём протяжении времени, пока действует подключение «звездой».
Таким образом, резистивно-статорный режим пуска подходит для машин с резистивным крутящим моментом, который увеличивается с набором скорости. Такой пуск оптимален для оборудования, подобного вентиляторам и центробежным насосам.
Однако есть недостаток — довольно высокий пиковый ток на запуске. Снижение тока возможно увеличением сопротивления. Но увеличение значения сопротивления грозит падением напряжения на клеммах электродвигателя и, как следствие, приводит к резкому снижению пускового момента.
Режим автотрансформаторного пуска
Режим автотрансформаторного пуска асинхронного электродвигателя характерен способом питания. На мотор подводится пониженное напряжение, благодаря автотрансформатору.
ПРОТЕКТОР
 Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — мотор
Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — моторПо завершению процесса старта автотрансформатор отключается. Пуск выполняется в три этапа:
- Автотрансформатор подключается к обмоткам мотора, соединённым «звездой». Понижение напряжения регулируется коэффициентом трансформации путём автоматического выбора оптимального отношения.
- Режим «звезды» остаётся активным до перехода на полное напряжение. Питание осуществляется через часть катушки индуктивности, соединённой последовательно с обмоткой электродвигателя. Операция продолжается до набора оптимальной скорости вращения.
- Полное соединение. На эту часть процесса отводятся миллисекунды. Часть обмотки автотрансформатора, последовательно включенной с двигателем, замыкается накоротко, после чего автотрансформатор отключается.
Пусковой процесс проходит без фактора разрыва прохождения тока в обмотках электродвигателя. Поэтому переходные явления по причине разрывов отсутствуют.
Между тем если не соблюдать определённые меры предосторожности, подобные явления переходного процесса могут появляться при подключении полного напряжения.
Этот дефект обусловлен высоким значением индуктивности, включенной последовательно с двигателем, по сравнению с режимом работы мотора на всём протяжении времени подключения «звездой».
Отмечается резкое падение напряжения, чем вызывается высокий рост переходного тока при подключении полного напряжения. Чтобы преодолеть этот недостаток, магнитная цепь автотрансформатора выполняется с воздушным зазором.
Наличие такого зазора способствует снижению значения индуктивности. Это значение рассчитывается для предотвращения изменения напряжения на клеммах электродвигателя, когда осуществляется переход на второй шаг процесса пуска.
Воздушный зазор вызывает увеличение тока намагничивания катушки автотрансформатора. Ток намагничивания увеличивает пусковой ток электросети при включении автотрансформатора.
Автотрансформаторный режим пуска обычно используется при эксплуатации двигателей мощностью более 150 кВт. Подобные схемы считаются экономически невыгодными по причине высокой стоимости автотрансформатора.
Режим пуска асинхронных двигателей с фазным ротором
Нельзя запускать асинхронный электродвигатель с фазным ротором сразу после короткого замыкания роторных обмоток. Этот метод приводит к появлению предельных пиковых токов.
АНТИФАЗНОЕ
 Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным ротором
Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным роторомНеобходимо использовать резисторы в цепях питания ротора. Замыкать роторные обмотки следует постепенно, по мере набора статором полного сетевого напряжения.
Сопротивление на каждой фазе необходимо рассчитывать с учётом точного определения кривой крутящего момента. В результате расчётное сопротивление полностью включается при запуске и замыкается накоротко только при достижении ротором полной скорости вращения.
Режим пуска электродвигателя с фазным ротором является лучшим выбором для всех случаев, когда пиковые токи машин должны быть низкими, а запуск осуществляется при полной нагрузке.
Такой пуск обладает чрезвычайно плавным ходом, так как достаточно легко регулировать количество и форму кривых, представляющих собой последовательные шаги по механическим и электрическим требованиям (резистивный крутящий момент, значение ускорения, максимальный пик тока и т. д.).
Режим плавного пуска: «запуск с замедлением»
Один из эффективных стартовых режимов, подходящих для плавного пуска и останова электродвигателя. Применяется с целью ограничение тока, регулировки крутящего момента. Контроль по ограничению тока устанавливается на максимум (кратность 3-4 от номинала) при пуске, чем снижается характеристика крутящего момента.
Этот способ удачно подходит для центробежных насосов, вентиляторов и т.п. Регулирование с помощью настройки крутящего момента оптимизирует крутящие моменты в процессе пуска и снижает пусковой ток.
ПЕРЕГРУЗКА
 Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторов
Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторовТакой режим оптимально подходит для машин с постоянным крутящим моментом. Этим режимом поддерживается много разных вариаций:
- симплексная работа,
- дуплексная работа,
- шунтирование устройства в конце пуска,
- запуск и замедление каскадных двигателей.
Пусковые режимы с преобразователем частоты
Современная эффективная пусковая система, применимая для использования, когда необходимо контролировать и настраивать в широком диапазоне скорость вращения вала мотора. Поддерживаются условия:
- пуск с высокими инерционными нагрузками;
- пуск с высокой нагрузкой, распределением мощности и с низкой ёмкостью короткого замыкания;
- оптимизация потребления электроэнергии;
- адаптация к скоростям вращения агрегатов.
Этот режим пуска асинхронных электродвигателей допустимо использовать на всех типах электрических машин. Однако подобные решения в основном используются для регулировки скорости вала электродвигателя, начиная с пусков второстепенного назначения.
Техника плавного старта мотора на видео
Как плавно запускать асинхронный мотор? Методика и возможные способы показаны на видеоролике. Смотрите ниже познавательный видео-материал, который должен стать полезным уроком потенциального электрика.
При помощи материалов: Schneider-electric
Почему стартовый ток асинхронного двигателя высокий Инструментальные средства
Пусковой ток асинхронного двигателя:
Пусковой ток асинхронного двигателя в 5–7 раз превышает нормальный ток полной нагрузки. Поэтому для снижения высоких пусковых токов асинхронного двигателя используются различные методы пуска асинхронного двигателя, такие как (пускатель звезда-треугольник, пускатель автотрансформатора и другие методы пуска).
Почему высокие пусковые токи:
Асинхронный двигатель можно сравнить с электрическим трансформатором с короткозамкнутой вторичной обмоткой.Первичную обмотку трансформатора можно сравнить с обмоткой статора асинхронного двигателя, а обмотку ротора рассматривать как короткозамкнутую вторичную обмотку трансформатора.
Модель цепи асинхронного двигателя показана на рисунке. Из модели асинхронного двигателя видно, что асинхронный двигатель состоит из двух параллельных цепей, которые соединены параллельно- Цепь компонента намагничивания
- Цепь сопротивления и реактивного сопротивления
Составляющая намагничивания тока, протекающего через асинхронный двигатель, пропорциональна приложенному напряжению и не зависит от нагрузки на двигатель, аналогично трансформатору.
Цепь сопротивления и реактивного сопротивления рассеяния состоит из сопротивления и реактивного сопротивления рассеяния статора и ротора асинхронного двигателя, соединенных последовательно. Сопротивление нагрузки (переменное) подключено последовательно к фиксированному сопротивлению ротора и статора. При запуске мотора скольжение будет единичным. Следовательно, если мы рассчитаем полное сопротивление (полное сопротивление статора и ротора) пусковым токам во время пуска асинхронного двигателя, то оно будет минимальным, что приведет к высоким пусковым токам во время пуска двигателя.
Когда 3-фазное напряжение подается на обмотку статора для запуска асинхронного двигателя, высокие пусковые токи намагничивают воздушный зазор между статором и ротором. Из-за вращающегося магнитного поля в обмотках ротора асинхронного двигателя создается наведенная ЭДС. Эта наведенная ЭДС создает электрический ток в обмотках ротора. Ток, генерируемый в обмотках ротора, создает поле, которое, в свою очередь, создает крутящий момент для вращения двигателя. Как только ротор начинает набирать скорость, ток, потребляемый машиной, уменьшается.Время, необходимое для запуска двигателя, зависит от времени, необходимого для ускорения, которое зависит от характера подключенной нагрузки.
Недостатки высоких пусковых токов в асинхронном двигателе:
Высокие пусковые токи, потребляемые асинхронным двигателем во время пуска, могут привести к значительному падению напряжения на подключенной шине. Это падение напряжения на шине может повлиять на производительность других двигателей, работающих на шине. Падения напряжения при запуске больших двигателей могут привести к отключению некоторых двигателей, работающих на одной шине.Следует соблюдать осторожность, чтобы ограничить пусковые токи во время запуска двигателя, используя соответствующие методы запуска.
Для двигателей большой мощности срок службы машины зависит от количества запусков. Высокие пусковые токи могут вызвать повышение температуры машины, повредить изоляцию и сократить срок службы машины
.Как работают электродвигатели?
Криса Вудфорда. Последнее изменение: 25 июля 2020 г.
Щелкните выключателем и мгновенно получите власть — как любили наши предки электродвигатели! Вы можете найти их во всем, начиная с электропоезда с дистанционным управлением автомобили — и вы можете быть удивлены, насколько они распространены. Сколько электрических моторы сейчас в комнате с тобой? Наверное, два в вашем компьютере для начала ездить, а еще один питает охлаждающий вентилятор.Если вы сидите в спальне, вы найдете моторы в фенах и многих игрушки; в ванной — вытяжки и электробритвы; На кухне моторы есть практически во всех устройствах, от стиральных и посудомоечных машин до кофемолок, микроволновых печей и электрических консервных ножей. Электродвигатели зарекомендовали себя одними из лучших изобретения всех времен. Давайте разберемся и узнаем, как они работай!
Фото: Даже маленькие электродвигатели на удивление тяжелые.Это потому, что они набиты туго намотанной медью и тяжелыми магнитами. Это мотор от старой электрической газонокосилки. Вещь медного цвета в сторону перед осью, с прорезями в ней, находится коммутатор, удерживающий двигатель вращение в том же направлении (как описано ниже).
Как электромагнетизм заставляет двигатель двигаться?
Основная идея электродвигателя очень проста: вы помещаете в него электричество с одного конца, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять машина какая то.Как это работает на практике? Как именно ваш преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, у нас есть вернуться во времени почти на 200 лет.
Предположим, вы берете кусок обычного провода, превращаете его в большую петлю, и положите его между полюсами мощной постоянной подковы магнит. Теперь, если вы подключите два конца провода к батарее, провод будет прыгать кратко. Удивительно, когда видишь это впервые. Это прямо как по волшебству! Но есть совершенно научный объяснение.Когда электрический ток начинает течь по проводу, он создает магнитное поле вокруг него. Если разместить провод возле постоянного магнит, это временное магнитное поле взаимодействует с постоянным поле магнита. Вы знаете, что два магнита расположены рядом друг с другом либо притягивать, либо отталкивать. Таким же образом временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнит, и это то, что заставляет провод подпрыгивать.
Правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобная мнемоника (вспомогательная память), называемая правилом левой руки Флеминга (иногда называется Motor Rule).
Вытяните большой, указательный и второй пальцы левой руки.
рука так, чтобы все три были под прямым углом. Если вы укажете вторым пальцем
в направлении Течения
(который течет от положительного к
отрицательная клемма АКБ), а Первая
палец в
направление поля (которое
течет с севера на южный полюс
магнит), ваш thuMb будет
покажите направление, в котором провод
Движется.
Это …
- Первый палец = Поле
- SeCond палец = Текущий
- ЧтМб = Движение
Несколько слов о текущем
Если вас смущает то, что я говорю, что ток течет с положительного на отрицательный, это просто историческое соглашение.Такие люди, как Бенджамин Франклин, помогавшие разобраться тайна электричества еще в 18 веке считала, что это поток положительных зарядов, так что она перетекала с положительного на отрицательный Мы называем эту идею условным током. и до сих пор используют его в таких вещах, как правило левой руки Флеминга. Теперь у нас есть лучшие идеи о том, как электричество работает, мы склонны говорить о токе как о потоке электронов от отрицательного к положительному в направлении , противоположном направлению обычного тока.Когда вы пытаетесь вычислить вращение двигателя или генератора, обязательно помните, что ток означает обычный ток , а не поток электронов.
Как работает электродвигатель — теоретически
Фото: Электрик ремонтирует электродвигатель. на борту авианосца. Блестящий металл, который он использует, может выглядеть как золото, но на самом деле это медь, хороший проводник, который намного дешевле. Фото Джейсона Якобовица любезно предоставлено ВМС США.
Связь между электричеством, магнетизмом и движением изначально была открыл в 1820 году французский физик Андре-Мари Ампер (1775–1867), и это основная наука об электродвигателе. Но если мы хотим превратить это удивительное научное открытие в более практическое немного технологий для питания наших электрических косилок и зубных щеток, мы должны пойти немного дальше. Изобретателями, которые сделали это, были англичане Майкл Фарадей (1791–1867). и Уильям Стерджен (1783–1850) и американец Джозеф Генри (1797–1878).Вот как они пришли к своему гениальному изобретению.
Предположим, мы сгибаем нашу проволоку в квадратную U-образную петлю, так что эффективно два параллельных провода, проходящие через магнитное поле. Один из них отводит электрический ток от нас по проводам, а другой один возвращает ток обратно. Потому что ток течет в Правило левой руки Флеминга говорит нам два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включите электричество, один из проводов двинется вверх и другой будет двигаться вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась постоянно — и мы будем на пути к созданию электрического мотор. Но этого не может произойти с нашей нынешней настройкой: провода будут быстро запутаться. Не только это, но если бы катушка могла вращаться далеко достаточно, что-нибудь еще случится. Как только катушка достигла вертикали положение, он перевернется, и электрический ток будет течь через него в противоположном направлении. Теперь силы на каждого сторона катушки перевернется.Вместо непрерывного вращения в в том же направлении, он пойдет обратно в том же направлении, в котором только что пришел! Представьте себе электропоезд с таким двигателем: он будет держать перетасовки назад и вперед на месте, фактически никогда не везде.
Как работает электродвигатель — на практике
Есть два способа решить эту проблему. Один из них — использовать своего рода электрический ток, который периодически меняет направление, что известно как переменный ток (AC). В виде небольших батарейных двигатели, которые мы используем дома, лучшее решение — добавить компонент назвал коммутатором концы катушки.(Не беспокойтесь о бессмысленных технических имя: это немного старомодное слово «коммутация» немного похоже на слово «добираться до работы». Это просто означает изменение взад и вперед в одном и том же путь, который ездит на работу, означает путешествовать туда и обратно.) В своей простейшей форме Коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждая половина коммутатора. Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.Они подают электроэнергию в коммутатор через пару свободных разъемы, называемые щетками, сделали либо из кусочков графита (мягкий уголь, похожий на карандаш «свинец») или тонкие отрезки упругого металла, который (как название предполагает) «задела» коммутатор. С коммутатор на месте, когда электричество течет по цепи, катушка будет постоянно вращаться в одном и том же направлении.
Работа: упрощенная схема частей в электрическом мотор. Анимация: как это работает на практике.Обратите внимание, как коммутатор меняет направление тока каждый раз, когда катушка поворачивается. наполовину. Это означает, что сила на каждой стороне катушки всегда толкая в том же направлении, что позволяет катушке вращаться по часовой стрелке.
Такой простой экспериментальный двигатель, как этот, не способен большая мощность. Мы можем увеличить усилие поворота (или крутящий момент) что двигатель может творить тремя способами: либо у нас может быть больше мощный постоянный магнит, или мы можем увеличить электрический ток протекает через провод, или мы можем сделать катушку так, чтобы в ней было много «витки» (петли) очень тонкой проволоки вместо одного «витка» толстой проволоки.На практике двигатель также имеет постоянный магнит, изогнутый в круглой формы, так что он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе магнит и катушка, тем большее усилие, которое может создать двигатель.
Несмотря на то, что мы описали ряд различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью — и это называется ротором. Ротор также включает в себя коммутатор.
Универсальные двигатели
Такие двигатели постоянного токаотлично подходят для игрушек с батарейным питанием (таких как модели поездов, радиоуправляемые автомобили или электробритвы), но вы не найдете их во многих бытовых приборах. В небольших приборах (например, кофемолках или электрических блендерах) обычно используются так называемые универсальные двигатели , которые могут питаться от переменного или постоянного тока.В отличие от простого двигателя постоянного тока, универсальный двигатель имеет электромагнит вместо постоянного магнита, и он получает энергию от источника постоянного или переменного тока, который вы питаете:
- Когда вы запитываете постоянный ток, электромагнит работает как обычный постоянный магнит и создает магнитное поле, которое всегда направлено в одном направлении. Коммутатор меняет направление тока катушки каждый раз, когда катушка переворачивается, как в простом двигателе постоянного тока, поэтому катушка всегда вращается в одном и том же направлении.
- Однако, когда вы подаете переменный ток, ток, протекающий через электромагнит, и ток, протекающий через катушку , оба, , меняют направление, точно в шаге, поэтому сила на катушке всегда в одном направлении, а двигатель всегда вращается либо по часовой стрелке. или против часовой стрелки.А как насчет коммутатора? Частота тока изменяется намного быстрее, чем вращается двигатель, и, поскольку поле и ток всегда синхронизированы, на самом деле не имеет значения, в каком положении находится коммутатор в любой данный момент.
Анимация: Как работает универсальный двигатель: Электроснабжение питает как магнитное поле, так и вращающуюся катушку. С источником постоянного тока универсальный двигатель работает так же, как и обычный двигатель постоянного тока, как указано выше. При питании от сети переменного тока и магнитное поле, и ток катушки меняют направление каждый раз, когда ток питания меняется на противоположное.Это означает, что сила на катушке всегда направлена в одну сторону.
Фото: Внутри типичного универсального двигателя: основные части внутри среднего двигателя от кофемолки, которая может работать от постоянного или переменного тока. Серый электромагнит по краю — это статор (статическая часть), и он питается от катушек оранжевого цвета. Обратите внимание на прорези в коллекторе и прижимающиеся к нему угольные щетки, которые обеспечивают питание ротора (вращающейся части). Асинхронные двигатели в таких вещах, как электрические железнодорожные поезда, во много раз больше и мощнее этого, и всегда работают с использованием переменного тока высокого напряжения (AC) вместо постоянного тока низкого напряжения (DC) или переменного тока умеренно низкого напряжения. который приводит в действие универсальные двигатели.
Электродвигатели прочие
В простых двигателях постоянного тока и универсальных двигателях ротор вращается внутри статора. Ротор представляет собой катушку, подключенную к источнику электроэнергии, а статор — это постоянный магнит или электромагнит. Большие двигатели переменного тока (используемые в таких вещах, как заводские машины) работают немного иначе: они пропускают переменный ток через противоположные пары магнитов, чтобы создать вращающееся магнитное поле, которое «индуцирует» (создает) магнитное поле в роторе двигателя, вызывая это вращаться.Подробнее об этом вы можете прочитать в нашей статье об асинхронных двигателях переменного тока. Если вы возьмете один из этих асинхронных двигателей и «развернете» его так, чтобы статор фактически превратился в длинную непрерывную дорожку, ротор может катиться по нему по прямой. Эта гениальная конструкция известна как линейный двигатель, и вы найдете ее в таких вещах, как заводские машины и плавучие железные дороги «маглев» (магнитная левитация).
Еще одна интересная конструкция — бесщеточный двигатель постоянного тока (BLDC). Статор и ротор эффективно меняются местами, при этом несколько железных катушек статичны в центре и постоянный магнит вращается вокруг них, а коммутатор и щетки заменяются электронной схемой.Вы можете прочитать больше в нашей основной статье о мотор-редукторах. Шаговые двигатели, которые вращаются на точно контролируемые углы, представляют собой разновидность бесщеточных двигателей постоянного тока.
Электродвигатель — Технический центр Эдисона
В электродвигатель был впервые разработан в 1830-х годах, через 30 лет после первая батарея. Интересно, что мотор был разработан до появления первых динамо-машина или генератор.| Выше: Первый мотор Davenport | 1.) История и изобретатели:1834 — Томас Дэвенпорт из Вермонта разработал первый настоящий электродвигатель («настоящее» значение достаточно мощный, чтобы выполнить задачу) хотя Джозеф Генри и Майкл Фарадей создал ранние устройства движения с использованием электромагнитных полей. Ранние «моторы» создавали вращающиеся диски или рычаги, которые качался взад и вперед. Эти устройства не могли сделать никакой работы для человечества но были важны для того, чтобы проложить путь к лучшим двигателям в будущем.Различные двигатели Давенпорта были может управлять модельной тележкой по круговой трассе и выполнять другие задачи. Тележка позже оказалась первым важным приложением электроэнергии (это была не лампочка). Рудиментарный полноразмерные электрические тележки были наконец построены через 30 лет после смерти Давенпорта в 1850-х годах. Мировой удар электродвигателя до лампочек: Только в 1873 году электродвигатель, наконец, добился коммерческого успеха. С 1830-х годов тысячи инженеров-первопроходцев улучшили двигатели и создали много вариаций. См. Другие страницы для получения более подробной информации об огромной истории электродвигателя. |
После слабые электродвигатели были разработаны Фарадеем и Генри, другой пионер по имени Ипполит Pixii выяснил это, запустив двигатель назад он мог создавать импульсы электричества. К 1860-м годам разрабатывались мощные генераторы. Электротехническая промышленность не могла начаться, пока генераторы были разработаны, потому что батареи не были экономичным способом получения энергии потребности общества.Узнать о генераторах и динамо здесь>
2.) Как работают моторыЭлектродвигатели могут работать от переменного (AC) или постоянного (DC) тока. Двигатели постоянного тока были разработаны первыми и имеют определенные преимущества и недостатки. Каждый тип мотора работает по-разному, но все они используют силу электромагнитного поля.Мы поговорим об основных принципах электромагнитных полей. в двигателях, прежде чем вы сможете перейти к различным типам двигателей. AC в электродвигателях используется вторичная и первичная обмотки (магнит), первичная подключен к сети переменного тока (или непосредственно к генератору) и находится под напряжением. Вторичный получает энергию от основного, не касаясь его напрямую. Это делается с помощью сложные явления, известные как индукция. Справа: инженер работает над кастомными модификациями дрона-октокоптера. Восемь крошечных DC двигатели создают достаточно мощности, чтобы поднимать фунты полезной нагрузки. Более новые конструкции двигателей, подобные этому, используют редкоземельные металлы в статоре для создания более сильных магнитных полей в небольших и легких пакеты. |
| Выше: универсальный двигатель, обычно используемый в большинстве электроинструментов.Имеет тяжелый плотный ротор. | Выше: асинхронный двигатель может иметь «беличью клетку» или полый вращающийся катушка или тяжелый якорь. |
2.a) Детали электродвигателя:
Есть много видов электродвигателей, но в целом они имеют похожие детали. Каждый мотор имеет статор , который может быть постоянным магнитом (как показано в «универсальном двигателе» выше) или намотанными изолированными проводами (электромагнит, как на фото вверху справа).Ротор находится посередине (большую часть времени) и подлежит к магнитному полю создается статором. Ротор вращается, поскольку его полюса притягиваются и отталкиваются полюсами статора. Смотрите наши видео ниже, показывающее, как это работает. В этом видео рассматривается бесщеточный двигатель постоянного тока, ротор которого находится снаружи, в других двигателях. тот же принцип обратный, с электромагнитами снаружи. Видео (1 минута):
Мощность мотора:
Сила двигателя (крутящий момент) определяется напряжением и
длина провода электромагнита в статоре,
чем длиннее провод (а значит, больше катушек в статоре), тем сильнее магнитное поле.Это означает больше мощности для
повернуть ротор. Смотрите наше видео, которое относится как к генераторам, так и к двигателям.
Узнать больше.
Арматура — вращающаяся часть двигателя — это раньше называлось ротором, это поддерживает вращающиеся медные катушки. На фото ниже вы не видите катушки, потому что они плотно заправлены в якорь. Гладкий корпус защищает катушки от повреждений.
Статор — Корпус и катушки, составляющие внешнюю часть двигателя. В статор создает стационарное магнитное поле.
Вверху: В этом статоре отчетливо видны четыре отдельные катушки (якорь был удалено)
Обмотка или «Катушка» — медные провода, намотанные на сердечник, для создания или получить электромагнитную энергию.
Провода, используемые в обмотки ДОЛЖНЫ быть изолированы. На некоторых фото вы увидите, что выглядит как обмотки из голого медного провода, это не так, это просто эмалированная с прозрачным покрытием.
Медь это самый распространенный материал для обмоток. Алюминий также используется но должен быть толще, чтобы нести такой же электрический безопасно загружать.Медные обмотки позволяют использовать двигатель меньшего размера. Подробнее о меди>
Перегорание мотора, устранение неисправностей:
Если двигатель работает слишком долго или с чрезмерной
нагрузки, он может «сгореть». Это означает, что высокая температура вызвала
изоляция обмотки может сломаться или расплавиться, а затем обмотки закорочены
когда они соприкасаются, и двигатель поврежден. Вы также можете сжечь двигатель, подав на него большее напряжение, чем
обмоточные провода рассчитаны на.В этом случае провод расплавится в самом слабом месте, разорвав соединение. Ты можешь
проверьте двигатель, чтобы увидеть, не перегорел ли он таким образом, проверив сопротивление (сопротивление) с помощью мультиметра.
Как правило, при проверке двигателя вы должны искать черные метки на обмотках.
Squirrel Cage — вторая катушка в асинхронном двигателе, см. Ниже
чтобы увидеть, как это работает
Индукция — генерация электродвижущей силы в замкнутом
цепь изменяющимся магнитным потоком через цепь.В сети переменного тока
уровень мощности повышается и понижается, это заряжает обмотку на
момент создания магнитного поля. Когда мощность падает в цикле
магнитное поле не может поддерживаться, и оно схлопывается. Это действие
передает мощность через магнетизм на другую обмотку или катушку. УЧИТЬСЯ
БОЛЬШЕ об индукции здесь.
3.) Типы электродвигателей переменного тока
|
3.а) Индукция
Двигатель
3.b) Универсальный двигатель (можно использовать постоянный или переменный ток)
3.c) Синхронные двигатели
3.d) Двигатели с экранированными полюсами
См. Нашу страницу, посвященную асинхронным двигателям, здесь>
Это мощный двигатель, который можно использовать с мощность переменного и постоянного тока.
Преимущества :
-Высокий пусковой крутящий момент и небольшой размер (хорошо для обычного использования в
бытовые электроинструменты)
-Может работать на высоких скоростях (отлично подходит для стиральных машин и электродрелей)
Недостатки:
— Щетки со временем изнашиваются
Использует: приборы, ручной электроинструмент
Посмотреть видео ниже:
|
Этот мотор аналогичен асинхронному двигателю, за исключением того, что он движется с частотой сети.
Мотор Селсин был разработан в 1925 году и сейчас известен как Synchro. Узнать больше о их здесь.
Преимущества: Обеспечивает постоянную скорость, которая определяется
количество полюсов и частота подаваемого переменного тока.
Недостатки: Не может работать с переменным крутящим моментом, этот двигатель будет
остановиться или «вытащить» с заданным моментом.
Использует: a часы использует s
Запуск двигателя — Введение
Электродвигатель, приводящий в движение насос
Запуск двигателя и связанные с ним проблемы хорошо известны многим людям, которые работали с крупными производственными процессами. Этот пост представляет собой краткое введение в запуск двигателя.
Двигатели используются более 100 лет, и за это время в их работе практически не произошло изменений. Асинхронный двигатель на сегодняшний день является наиболее широко используемым двигателем в промышленности и строительстве.Таким образом, в этой книге основное внимание уделяется применению пуска двигателей в сочетании с асинхронными двигателями.
Асинхронные двигатели основаны на взаимодействии магнитных полей для преобразования электроэнергии в мощность вращения. Наращивание магнитных полей и противодвижущей силы или противо-ЭДС во время пуска двигателя вносит переходные условия в электрическую систему. Эти переходные процессы могут повлиять на систему электроснабжения и другое подключенное к ней оборудование.Основными причинами, по которым запуск двигателя уделяется внимание, являются: ограничение переходных процессов; и для обеспечения правильного ускорения двигателя механической нагрузкой.
Время пуска двигателя, пусковой ток и переходные процессы при пуске.
Время пуска двигателя — это период от момента, когда к двигателю подключено электрическое питание, до момента, когда двигатель разгоняется до полной скорости. Продолжительность периода пуска зависит от комбинации двигателя и механической нагрузки и может составлять от долей секунды до 30 секунд или дольше.
Высокие уровни тока требуются в период запуска, и они могут иметь пагубные последствия для системы электроснабжения и другого подключенного к ней оборудования. Продолжительность переходных процессов пуска зависит от характеристик нагрузки и от того, сколько времени требуется двигателю, чтобы набрать скорость.
На рисунке ниже показано, что происходит во время запуска двигателя. В течение периода пуска потребляется ток, значительно превышающий нормальный рабочий ток двигателя при полной нагрузке, магнитные поля внутри двигателя и противоэдс увеличиваются, а механическая нагрузка ускоряется.Пусковой ток может в пять-восемь раз превышать ток полной нагрузки.
Ток двигателя во время запуска и работы
Электрические системы спроектированы с учетом условий установившегося периода работы. Размеры кабелей рассчитаны таким образом, чтобы они соответствовали условиям работы в установившемся режиме, а падение напряжения в электрической системе рассчитывается на основе условий установившегося режима.
Во время пуска двигателя по кабелям будет подаваться больший ток, чем во время установившегося периода работы.Падение напряжения в системе также будет намного больше во время периода пуска, чем во время периода работы в установившемся режиме — это становится особенно очевидным, когда запускаются большие двигатели и / или если одновременно запускаются многие двигатели.
Если падение напряжения на самом двигателе слишком велико во время периода пуска, двигатель может быть не в состоянии развивать достаточный крутящий момент для ускорения механической нагрузки. Кроме того, падение напряжения в электрической системе может повлиять на другое оборудование, вплоть до отказов.
По мере того, как двигатели стали широко использоваться, инженеры стали беспокоиться о проблемах с запуском двигателей. За прошедшие годы было разработано множество методов и приемов, каждый со своими преимуществами и ограничениями, для решения проблем, связанных с запуском двигателя.
Чаще всего используются следующие методы запуска двигателя:
- Прямой запуск
- Звезда-треугольник
- Автотрансформатор
- Сопротивление первичной обмотки
- Сопротивление ротора
- Электронный плавный пуск
Прямое включение и звезда-треугольник На сегодняшний день это наиболее часто используемые методы запуска двигателя.Однако в последнее время были достигнуты огромные успехи в использовании электроники для регулирования подачи электроэнергии на двигатели, и электронный пуск быстро догоняет DOL и звезду-треугольник. Эти достижения можно использовать для того, чтобы двигатель работал с очень специфическими характеристиками ускорения.
Это введение в запуск двигателя — отрывок из моей краткой вводной книги по этой теме. Если вы хотите углубиться в процесс запуска двигателя и понять, как работают различные типы стартеров, обратитесь к книге.
Содержание
Введение в запуск двигателя
Пуск от сети
Пуск звезда-треугольник
Пуск с автотрансформатором
Пуск по первичному сопротивлению
Пуск по сопротивлению ротора
Электронный плавный пуск
Приводы с переменной частотой
Сводка методов пуска двигателя
Как рассчитать время запуска двигателя
Полезная техническая информация о двигателе
Типовая информация о конструкции запуска двигателя
Список символов и глоссарий
Книга доступна в формате электронной книги в мягкой обложке во всех магазинах Amazon.
.