|
Cписок сравнения: Каталог
|
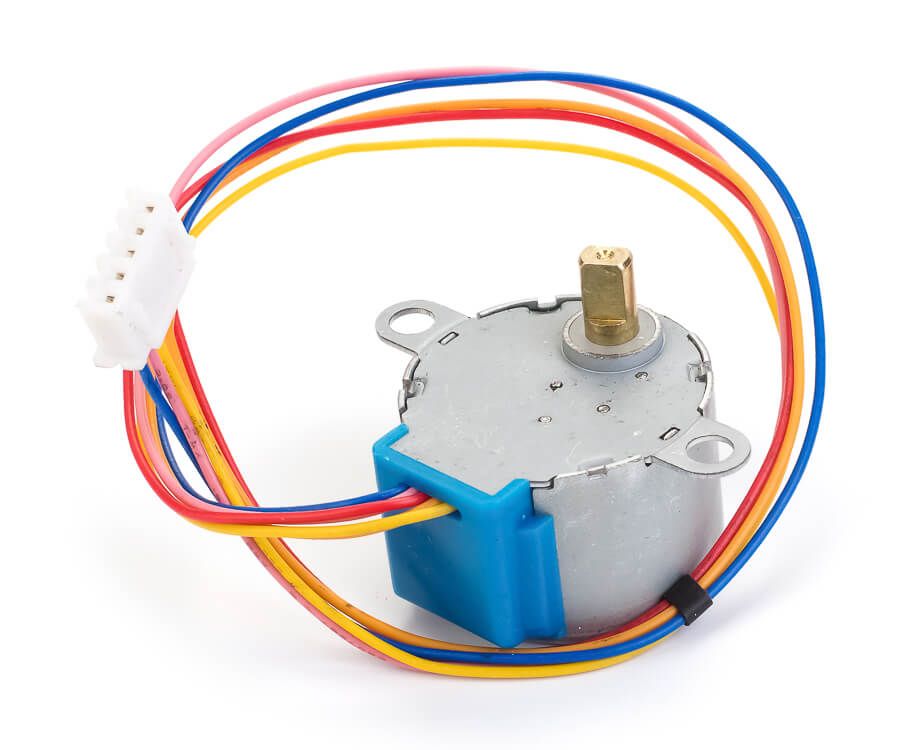
Крошечный, но достаточно мощный двухфазный шаговый двигатель с металлическим редуктором.
Распиновка: красный А-, оранжевый А+, коричневый В+, черный В-. Напряжение питания 5В, сопротивление на фазу 12 Ом.
Відгуки покупців про Маленький шаговый двигатель с редуктором поки немає жодного відгуку — станьте першим! |
Шаговый двигатель Nema 17HS19-2004S1
Добрый день!Некоторое время назад самостоятельно начал собирать 3D принтер HyperCube. Заказал набор самых дешевых шаговых двигателей nemo 17, как позже выяснилось, что экономить не стоило, хотя бы на двигателе, который стоит на подаче экструдера.
 При печати температура двигателя превышала 60 градусов, собственно из-за чего и пришлось заказать более мощный двигатель.
При печати температура двигателя превышала 60 градусов, собственно из-за чего и пришлось заказать более мощный двигатель.Биполярный двигатель имеет две обмотки, по одной в каждой фазе, которая для изменения направления магнитного поля переполюсовывается драйвером. Соответственно, от мотора отходят четыре провода.
Инструкция/характеристики:
Внешний/внутренний вид:
Этот двигатель координатно от других шаговых двигателей типа nemo 17 ничем не отличается.На фотографии виден конструктивный просчет в виде отверстия для проводов, через которое может попасть грязь внутрь двигателя. Это не критично, я закрыл отверстие с помощью изоленты.
Двигатель подачи был временно закреплен на стяжки)
При скорости 100% двигатель нагревался до:
при скорости 200%:
Во избежании перегрева (пока доставлялся новый двигатель) временно установил два кулера:
Двигатель старый/новый:
Новый двигатель выглядит надежнее:
Замеры показали, что температура уменьшилась практически в два раза:
на скорость 100%:
на скорость 200%:
Все замеры производились спустя 30 минут, после начала
Мои двигатели работают от 12 вольт, на тематических форумах есть информация о переделки RAMPS на 24 вольтовою систему, благодаря, которой двигатели меньше греются, пока времени на переделку нет, но в планах есть.
Итог:
Двигатель работает стабильно, выполнен качественно.Единственным минусом считаю, что не продуман вывод проводов, через него виднеется обмотка, на которую может легко попасть различный мусор, что повлияет на работу двигателя. Я решил эту проблему синей изолентой.
Распечатал крепление, подключил в плате RAMPS и все заработало как надо.
Конечно можно было переделать RAMPS на 24 вольта, но я не думаю, что эффект будет более результативный.
Если есть вопросы, обращайтесь, постараюсь на них ответить.
Всем спасибо за внимание!
Если обзор понравился, не забываем нажать «Обзор понравился»!) Всем добра!
Как работают шаговые двигатели
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора.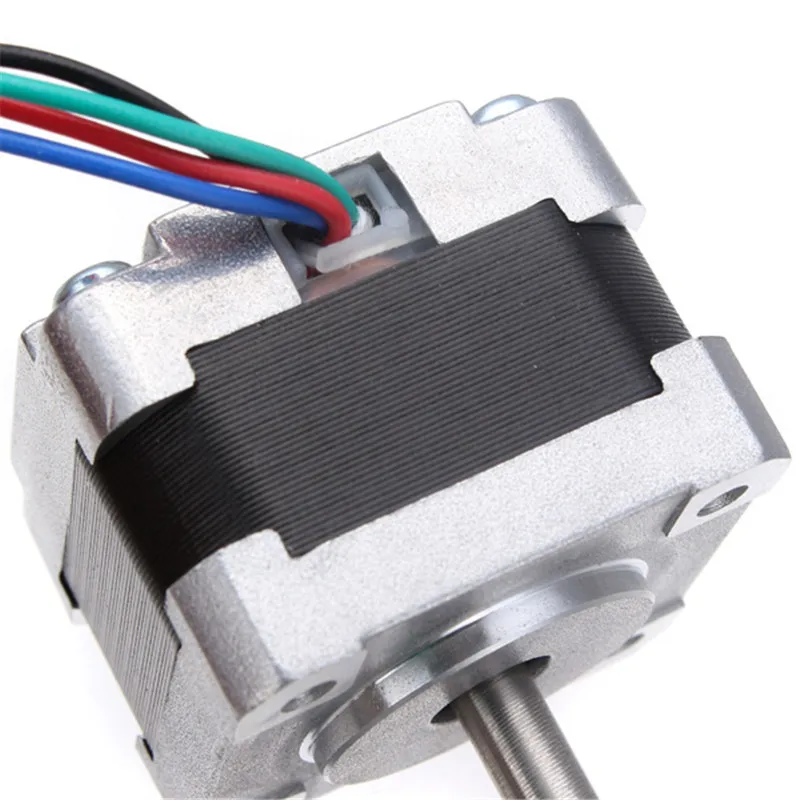 На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели.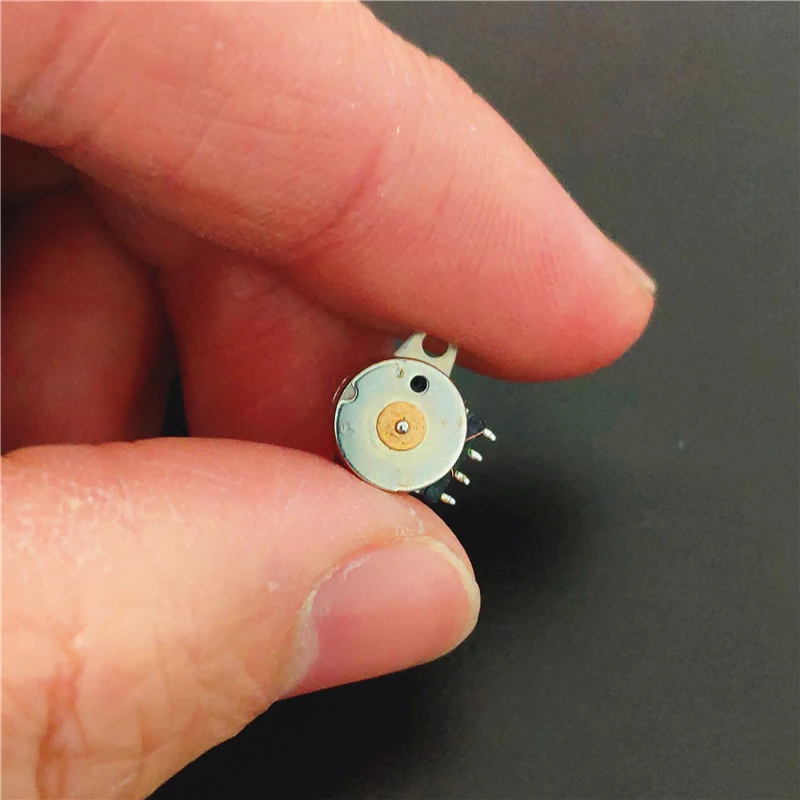 Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Управление движением: эволюция шаговых двигателей
Простота управления, компактность моторов и приводов, больший удельный вращающий момент — вот несколько причин, по которым стоит взять шаговый двигатель вместо сервопривода для приложения небольшой мощности.

Это единственный метод управле-движением, способный рабо-ать в разомкнутом контуре, т.е. обратной связи о положении. Это делает системы на базе шаговых двигателей проще, чем системы серводвигателей, причем более низкая стоимость шаговых моторов лишь добавляет им привлекательности. В совместном применении с другими усовершенствованиями — такими как миниатюризация оборудования и высокая плотность крутящего момента — шаговые системы остаются конкурентоспособными во многих приложениях управления движением, в которых требуются относительно низкая скорость и точность позиционирования. Системы управления движением на базе шаговых двигателей могут достигать мощности, эквивалентной 0,75 кВт (1 л.с.), но многие приложения работают на гораздо меньших мощностях. Значительная часть производителей выпускает такие устройства.
Размер и простота — определяющие параметры
Компания Parker Hannifin Corp. видит в маленьком размере и простоте явное преимущество шаговых систем относительно серводвигателей, что также отражается в цене.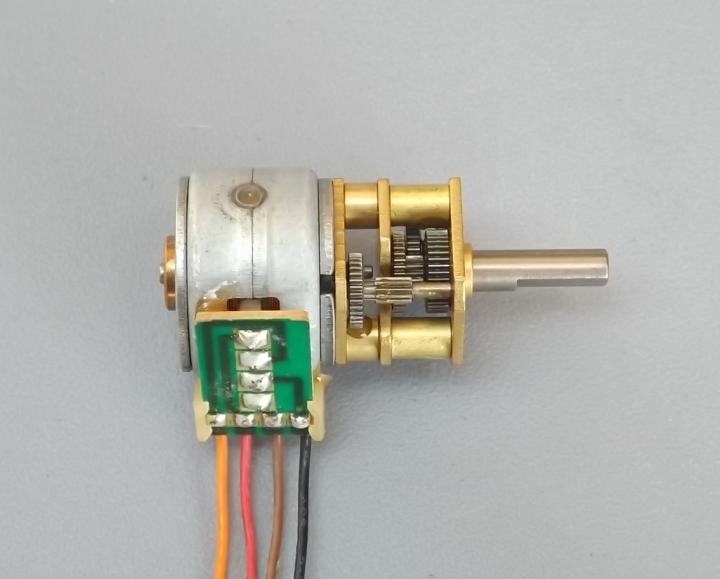 «Шаговые системы теперь общедоступны в миниатюрном размере без существенной доплаты за размер,- говорит менеджер по продукции Марк Фей. — Существует несколько миниатюрных сервосистем, однако они не такие уж и маленькие, да и стоят больше, поскольку необходимо уменьшать размеры большего числа компонент». Простота незамкнутого контура — это второе преимущество. Однако соревноваться в соотношении цена/производительность становится все труднее.
«Шаговые системы теперь общедоступны в миниатюрном размере без существенной доплаты за размер,- говорит менеджер по продукции Марк Фей. — Существует несколько миниатюрных сервосистем, однако они не такие уж и маленькие, да и стоят больше, поскольку необходимо уменьшать размеры большего числа компонент». Простота незамкнутого контура — это второе преимущество. Однако соревноваться в соотношении цена/производительность становится все труднее.
Улучшения продолжаются в направлении уменьшения размеров и поддержания производительности «за разумную цену». Чтобы соответствовать требованиям по цене и размерам, отдел электромеханической автоматизации компании Parker представляет мотор/контроллер Prostep — компактный микрошаговый модуль с полностью программируемым контроллером и встроенными возможностями ввода/вывода.
Блок размером с ладонь (2.79 x 3.81 х 4,32 см) крепится рядом с линейными силовыми приводами серии Promech компании Parker, и получается миниатюрная система, основанная на шаговых двигателях.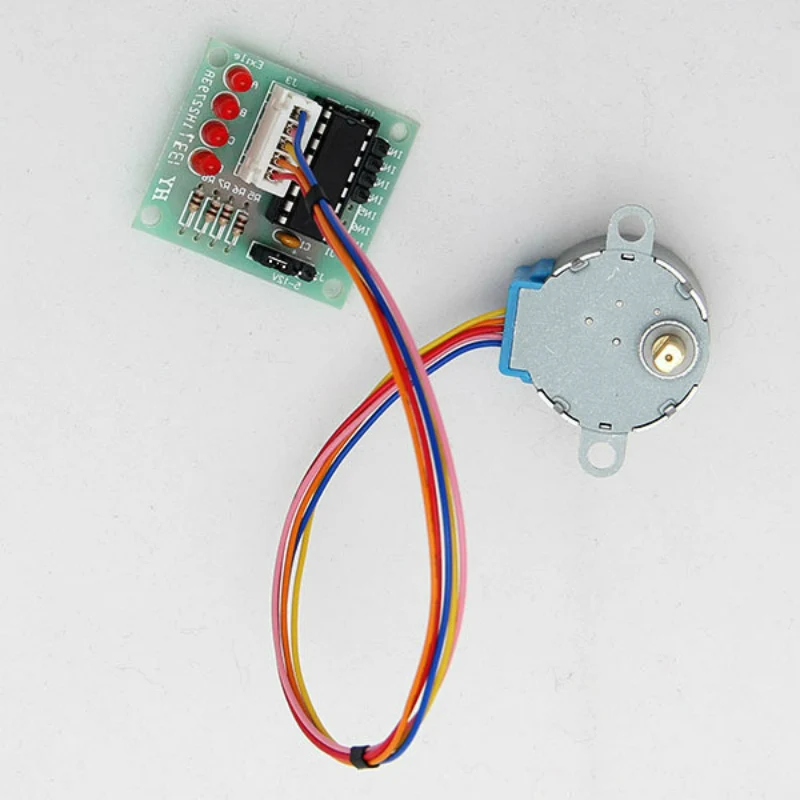 Роторные шаговые двигатели компании Parker имеют размеры сторон до 11, 14 и 17 по стандарту NEMA, что соответствует 1,1, 1,4 и 1,7 дюймов (2,79, 3,81 и 4,32 см) в поперечном сечении квадратного мотора.
Роторные шаговые двигатели компании Parker имеют размеры сторон до 11, 14 и 17 по стандарту NEMA, что соответствует 1,1, 1,4 и 1,7 дюймов (2,79, 3,81 и 4,32 см) в поперечном сечении квадратного мотора.
В компании Shinano Kenshi Corp. (SKC) утверждают, что малые размеры моторов, высокая плотность крутящего момента и низкие шумы/вибрации являются улучшениями, которые дают преимущества шаговым двигателям. В SKC утверждают, что добились улучшений по всем этим направлениям, не увеличивая (или уменьшая) стоимость своих шаговых двигателей. В соответствии с их заявлениями, новая измененная штамповка пластин статора и ротора позволила оптимизировать внутреннее пространство и устройство шаговых двигателей 17 и 23 по NEMA.
По утверждению Рекса Бергсма, президента SKC (США), шаговые двигатели новой конструкции дают вращающий момент на 20-30% больший, нежели предыдущая модель SKC, при том же питании и стандартных рентабельных магнитных материалах. Улучшения заключаются в размещении дополнительных магнитных материалов в роторе. При фиксированном общем объеме необходимо было уменьшить размер статора, где расположена фазная обмотка. Измененная штамповка пластин так же улучшила форму профиля каждого зуба ротора и статора для новых шаговых моторов STP-43D. В результате получился более сильный и сфокусированный магнитный поток, что привело к уменьшению слышимого шума (см. рисунок), и «время установления почти в два раза меньше в сравнении с предыдущими моделями», — говорит Бергсма.
При фиксированном общем объеме необходимо было уменьшить размер статора, где расположена фазная обмотка. Измененная штамповка пластин так же улучшила форму профиля каждого зуба ротора и статора для новых шаговых моторов STP-43D. В результате получился более сильный и сфокусированный магнитный поток, что привело к уменьшению слышимого шума (см. рисунок), и «время установления почти в два раза меньше в сравнении с предыдущими моделями», — говорит Бергсма.
Не просто роторный
Кроме традиционных роторных шаговых двигателей существует значительное число линейных шаговых систем. Компания Baldor Electric Co. отмечает увеличившийся интерес к таким продуктам линейного перемещения со стороны инженеров-конструкторов. В качестве обоснования компания указывает на такие преимущества роторных шаговых (и серво) двигателей, как меньшее число деталей, практическое отсутствие износа и обслуживания, а также простота их интеграции в механизмы. «Линейные шаговые двигатели хорошо подходят для приложений с небольшими нагрузками, а также обеспечивают отличную производительность в других приложениях с открытым контуром, предлагая большие ускорения и скорость в сравнении с роторными моторами», — говорит менеджер по продукции компании Baldor Джон Мазур-кевич.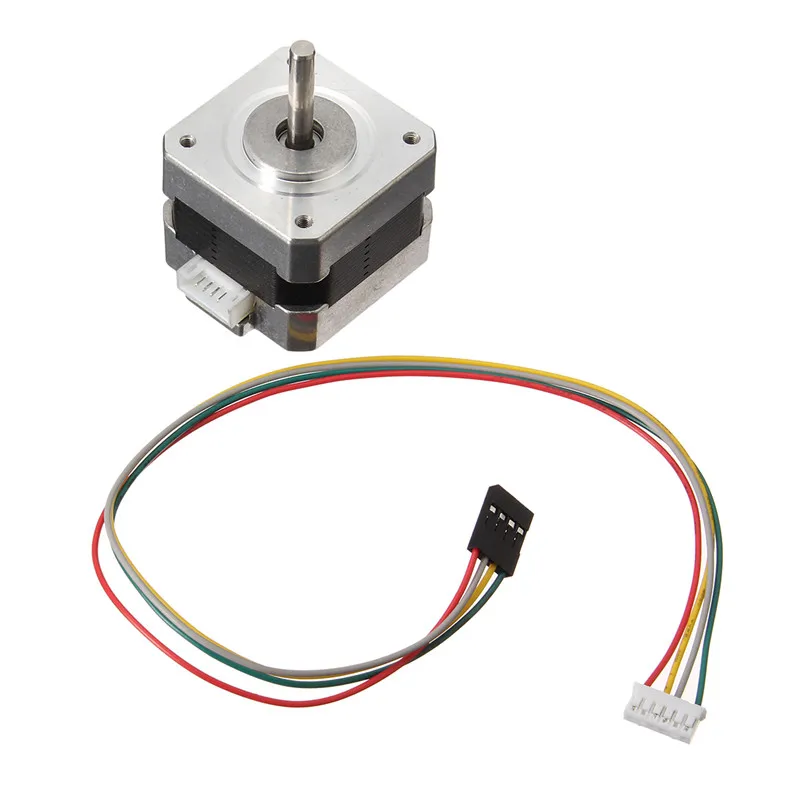
Контроллер движения реального времени от компании Baldor Electric, NextMove e 100 может производить интерполяцию для 16 осей и обрабатывать до 240 осей, подключенных через Ethernet Powerlink. Эти оси работают с перемещениями точка-точка, установочными последовательностями, управлением толчками, а также работают с функциями получения крутящего момента, связанными с шаговыми (с серво) системами.
Улучшенная штамповка компонент нового шагового двигателя компании Shinano Kenshi Corp. позволила создать больший крутящий момент из-за лучшей фокусировки магнитного потока, а также уменьшила вибрации магнитного поля и слышимый шум на 3-6 дБ, в зависимости от рабочей частоты.
Компания Baldor производит широкий спектр линейных шаговых двигателей, включая одно- и двухосные (x-y) модели, многоосные портальные образцы и двигатели под индивидуальные заказы. Программируемые контроллеры серии NextMove имеют необходимые выходы для работы с линейными и роторными шаговыми двигателями (а также и с серводвигателями). Самый новый продукт серии NextMove — это контроллер движения реального времени (см. рисунок).
Самый новый продукт серии NextMove — это контроллер движения реального времени (см. рисунок).
Компания Oriental Motor Co. (OM) описывает разработку нового шагового двигателя и различных систем движения как процесс «оттачивания параметров производительности и интеграции компонент». Процесс включает в себя несколько направлений.
• Большая плотность крутящего момента: периодический пересмотр и включение материалов с более высокой магнитной проницаемостью — редкоземельных магнитов неодим-железо-бор (Nd-Fe-B), а также структурные изменения, такие как больший диаметр ротора, увеличили крутящий момент двигателя. Это улучшение затронуло гибридные двигатели высокого крутящего момента серий PV и PK-HT (2-фазные) и 5-фазные серии CRK.
• Улучшение точности шага и плавности привода: передовой микрошаговый метод используется для получения более высокой точности шага с помощью устройства размыкания тока. Например, в устройствах Oriental серии RK 5-фаз-ный микрошаговый привод содержит специализированную интегральную схему, патентованное программное обеспечение и датчик тока для управления током в широком диапазоне скоростей.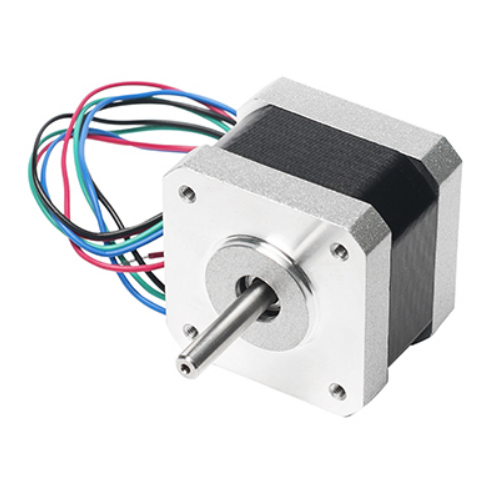 Датчик тока и управляющее ПО также обеспечивают «функцию плавного привода», которая ограничивает вибрации и шум при работе независимо от входной частоты двигателя, объясняет Ник Йохантген, технический руководитель Oriental Motor США. Низкие вибрации, присущие 5-фазным двигателям, в сравнении с 2-фазными, также вносят свой вклад в эту функцию. В качестве примера устройств с «функцией плавного привода» можно привести 5-фазные шаговые двигатели серий RK и CRK.
Датчик тока и управляющее ПО также обеспечивают «функцию плавного привода», которая ограничивает вибрации и шум при работе независимо от входной частоты двигателя, объясняет Ник Йохантген, технический руководитель Oriental Motor США. Низкие вибрации, присущие 5-фазным двигателям, в сравнении с 2-фазными, также вносят свой вклад в эту функцию. В качестве примера устройств с «функцией плавного привода» можно привести 5-фазные шаговые двигатели серий RK и CRK.
• Дальнейшее уменьшение размеров: «Общий тренд развития шаговых двигателей с открытым контуром и связанных с ними приводов направлен в сторону уменьшения размеров, — говорит Йохантген. — Много новых приложений в портативных медицинских и промышленных приборах требуют использования всё более маленьких моторов». С данной целью OM разработала 5-фазные моторы серии CRK размеров 8 и 11, а также 2-фазные моторы серии PK размеров 11 и 14 (35 мм). Новый компактный микрошаговый CRK-привод имеет размеры всего 2.49 x4.5x 6.5 см и управляет CRK-моторами с током до 1,4 А на фазу.
Системный подход, рыночный подход
Еще одно направление в компании Oriental Motor — это объединение различных шаговых компонент в единое решение с системой координат. Оно состоит из платформы, шарнирного соединения, амортизатора, вывода контактов и контроллера. «Объединение отдельных компонент в полную систему приводит к уменьшению общей стоимости», добавляет Йохантген. Это также помогает выдерживать конкуренцию со стороны систем на серводвигателях.
Три типа зубчатых редукторов для шаговых двигателей серии CRK также являются частью предлагаемой системы. Недорогая зубчатая шестеренка имеет люфт 10-35 мин (в зависимости от передаточного числа), планетарная шестерня имеет широкий диапазон передаточного числа и люфт 3 мин, а гармоническая шестерня совсем не имеет люфта.
Общий объем рынка шаговых систем, включая коммерческие и автомобильные сектора, довольно велик. Основной сектор промышленной автоматизации (ПА), является существенно более маленьким рынком — согласно последнему рыночному исследованию, проведенному компанией Motion Tech Trends (MTT), в Северной Америке в 2006 было куплено шаговых двигателей и элементов управления примерно на 156 млн.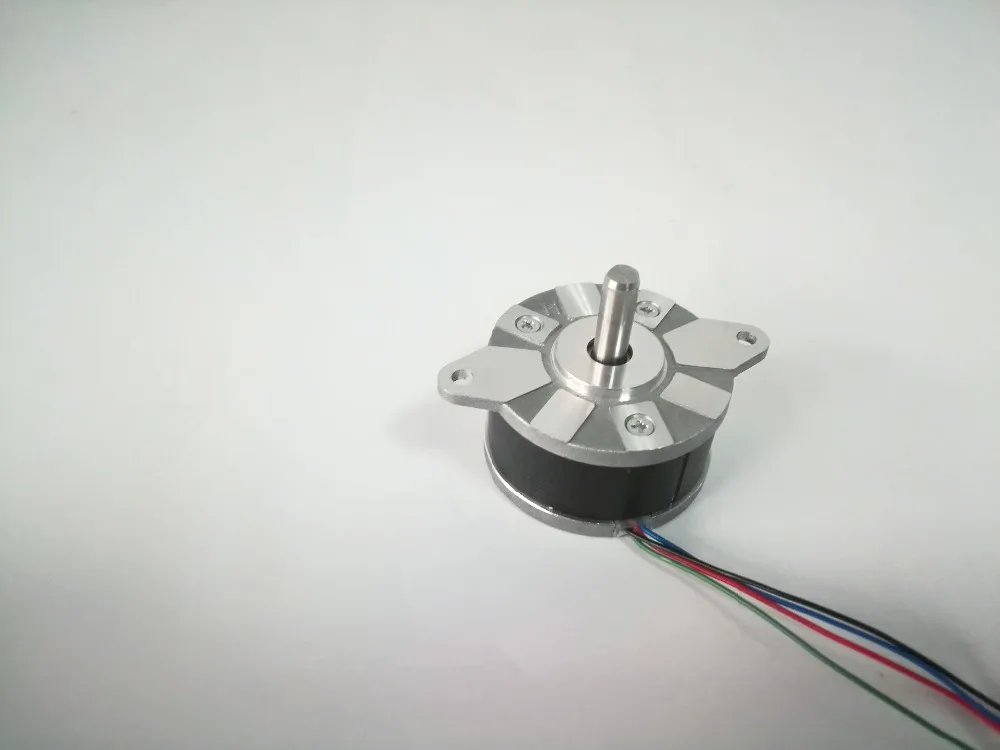 долларов США. Рынок ПА включает в себя механические станки, робототехнические
долларов США. Рынок ПА включает в себя механические станки, робототехнические
системы, OEM производственное оборудование всех типов (в том числе полупроводниковое оборудование, печатное, текстильное,
по изготовлению пластика и т.п.) Приблизительные оценки рынка шаговых систем Европы и Японии, полученные MTT, выше североамериканских на 15% и 50% соответственно.
Исследование MMT, автором которого является Мухаммед Мубеен, показывает, что на рынке приложений ПА преобладают два типа шаговых двигателей (см. рисунок «Рынок»). Это массовые двигатели типа «консервная банка» и гибридные шаговые моторы с постоянным магнитом. Еще одно устройство моторов – с переменным магнитным сопротивлением (ПМС) – практически ушло из этой области.
По прогнозам Motion Tech Trends после 2006 года рост североамериканского рынка шаговых систем ожидается на уровне 3-4%.
«Шаговые двигатели с ПМС почти не увидишь в новых приложениях, особенно при новых ценах на китайские гибридные шаговые моторы», утверждает Мубеен. Единственное исключение для шаговых двигателей с ПМС – это очень высокотемпературные
Единственное исключение для шаговых двигателей с ПМС – это очень высокотемпературные
приложения, но не в высокопроизводительной части рынка. Исследование MMT „North American Market for Step Motors and Controls (2001-2006)” можно найти на сайте MotionInfo.com в разделе Information Product Center.
Компания Berger Lahr Motion Technology Inc. (подразделение компании Schneider Electric) основными направлениями развития
шаговых систем считает компактность, простоту и сопряжение с компьютерными сетями. Как пояснил руководитель проектов
Сэм Бэнди, уменьшающиеся размеры приводов и двигателей помогают снизить требования к пространству, которое занимают
шкафы управления и станки, в то время как настройка системы может быть произведена менее чем за час с помощью настроек
DIP- и поворотных переключателей. Шаговый двигатель не требует использования платного ПО. «Однако некоторым шаговым системам со встроенными функциями требуется конфигурационное программное обеспечение с полями для ввода данных», – говорит Бэнди.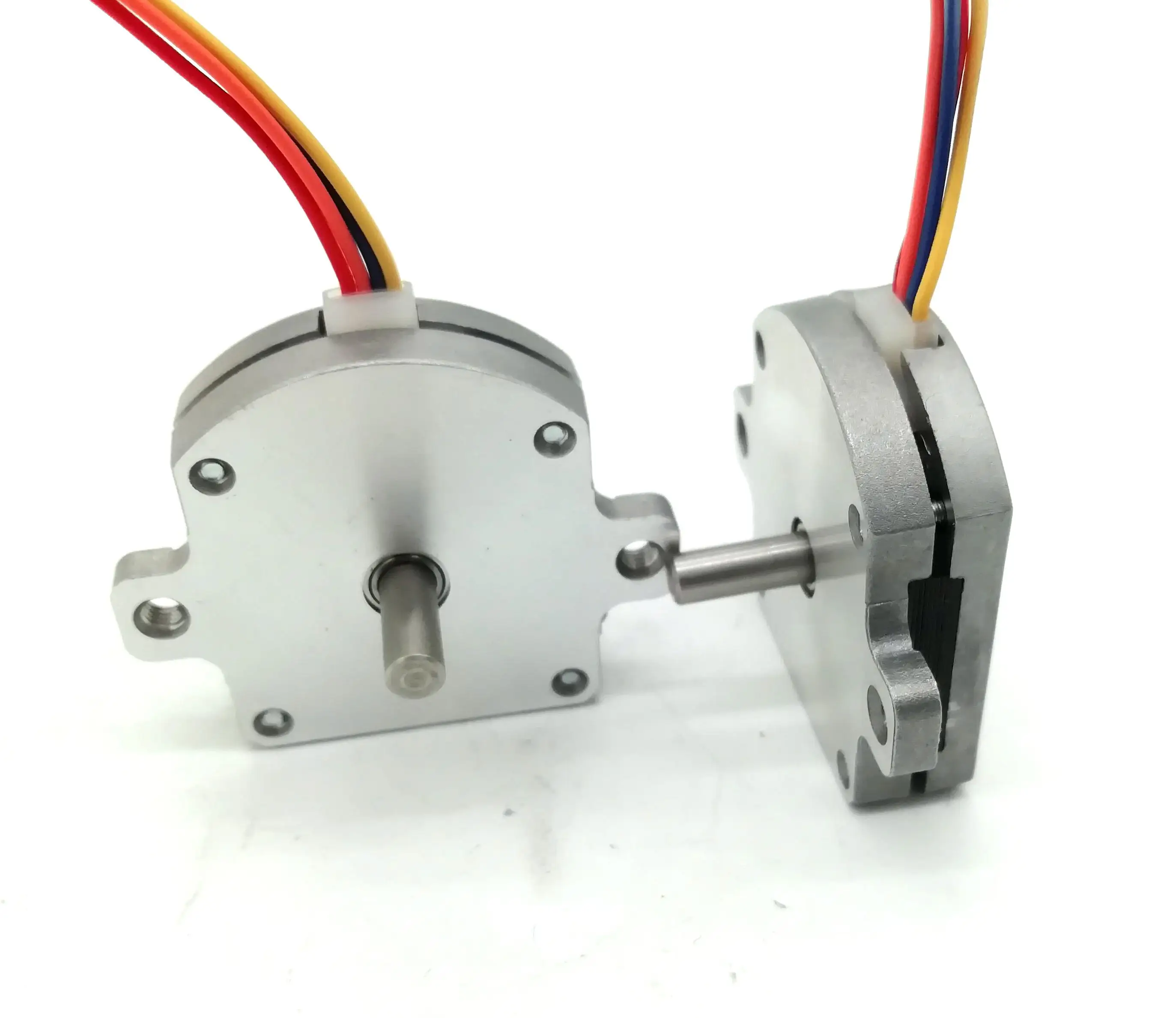
Соединение шаговых двигателей с компьютерными сетями осуществляется с помощью интерфейсов CAN-open, Profibus, Ethernet и т.д. и создает спрос на устройства многоосевого контроля, обмена данными с высокоуровневыми контроллерами и устройства
по сбору данных о статусе систем.
Конкуренция с серводвигателями
В отличие от серводвигателей комбинация привод-двигатель в шаговых системах не требует настройки, отмечает Бэнди. «Это устраняет потребность в специалисте при вводе в эксплуатацию, а также уменьшает время настройки», — говорит Бэнди. Еще одно преимущество шаговых двигателей — это малое время отклика. По технологии работы серводвигателей корректирующее действие основывается на содержимом ошибки, которое является разницей между желаемым действием и реальным состоянием, в соответствии с правилами ПИД-управления в закрытом контуре. «Этот реакционный, вносящий задержку метод определения относительного положения в некоторых приложениях, таких как печать и маркирование, работает медленнее, — говорит Бэнди. — В шаговых системах нет такой задержки. Упреждающее действие не зависит от текущего состояния и может быть выполнено, основываясь только на элементе управления».
— В шаговых системах нет такой задержки. Упреждающее действие не зависит от текущего состояния и может быть выполнено, основываясь только на элементе управления».
Новый гибридный двигатель серии h4 компании Portescap производит на 40% больший крутящий момент при той же опорной поверхности, как и в стандартной линии h4 (и конкурирующих моделях). Улучшенные магниты статора делают вклад в более высокую производительность, фокусируя магнитный поток и увеличивая крутящий момент.
Рекс Бергсма из SKC полагает, что конкуренция между системами на шаговых и серводвигателях основывается на цене. «Серводвигатели все еще не могут соревноваться с шаговыми по цене. А так как цены на шаговые двигатели все продолжают снижаться, то они, наверное, никогда и не смогут», — утверждает Бергсма. Более того, шаговые двигатели «приспособились» к массовому производству, что снижает их удельную стоимость. «У них более привлекательная коммерческая стоимость, чем у серводвигателей», — продолжает Бергсма.
Спрос на то, что он называет «системы под ключ» на базе шаговых или серводвигателей, невысок. Подобные одно- или двухмоторные приложения обычно используют «черную коробку» с контроллером шагового привода, которая иногда имеет слишком много функций и может быть слишком дорога. «Большинство же двигателей сегодня интегрируются в заказные или стандартные приложения, где требуется большое количество двигателей», — говорит Бергсма.
Большая часть высокообъемных приложений по управлению движением работает на шаговых двигателях. Эти чувствительные к цене компонентов системы получают преимущество в виде более дешевой продукции за счет элементов управления шаговыми двигателями на базе интегральных схем. «Системы на серводвигателях все еще можно встретить в OEM оборудовании, но только в приложениях низких и средних объемов и только там, где требуется обратная связь и ускорение/замедление, которые могут обеспечить серводвигатели», — добавляет Бергсма.
Снова о том же
КонниЧик, директор GE Fanuc, подразделения систем управления, говорит об известных особенностях шаговых систем — они подходят для систем движения класса low-end, где конечная точность позиционирования совсем не критична.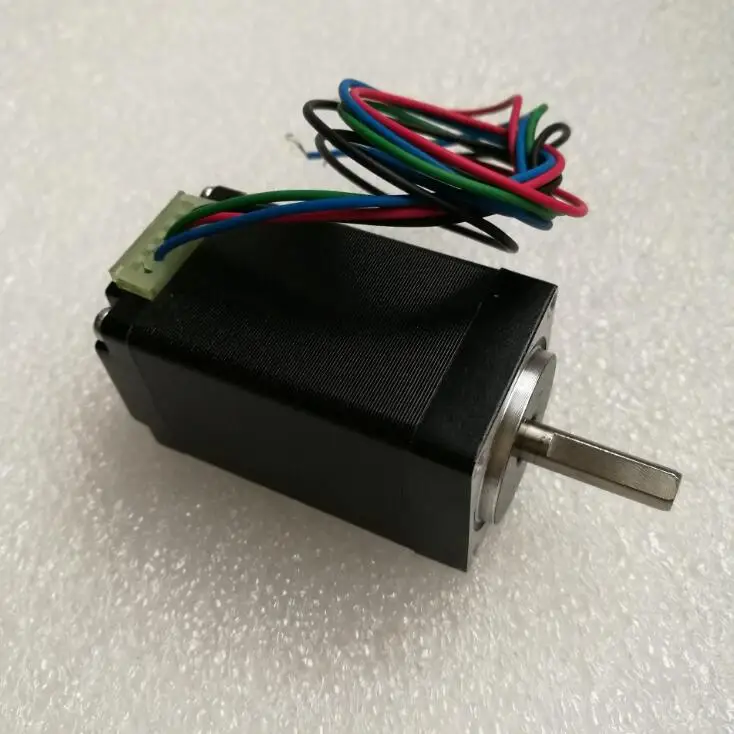 Шаговые двигатели также хорошо работают для несложного набора осей, например в приложениях перемещения — подача, направляющие и концевой упор. «Серводвигатели имеют гораздо более высокие показатели скорости и крутящего момента. Поэтому высокоскоростные механизмы, в которых требуется точное позиционирование и/или высокий крутящий момент не подходят для использования в них шаговых двигателей», — говорит Чик.
Шаговые двигатели также хорошо работают для несложного набора осей, например в приложениях перемещения — подача, направляющие и концевой упор. «Серводвигатели имеют гораздо более высокие показатели скорости и крутящего момента. Поэтому высокоскоростные механизмы, в которых требуется точное позиционирование и/или высокий крутящий момент не подходят для использования в них шаговых двигателей», — говорит Чик.
Одна из разработок компании GE Fanuc направлена на микроэлементы управления и «умные шаговые двигатели». Она включает в себя усилитель шагового двигателя, интегрированный в корпус мотора и имеющий вход для получения команд через сеть. Система состоит из программируемого логического контроллера малого форм-фактора VersaMax Micro 64 производства GE Fanuc со встроенным выходным элементом управления (импульс/направление) и умного шагового двигателя MotorCube, который не занимает много места. Нацеленный на применение в простых приложениях по перемещению с очень низкими ценовыми уровнями, этот подход удерживает стоимость управления станком на уровне до 2000 долларов (для одной оси перемещения).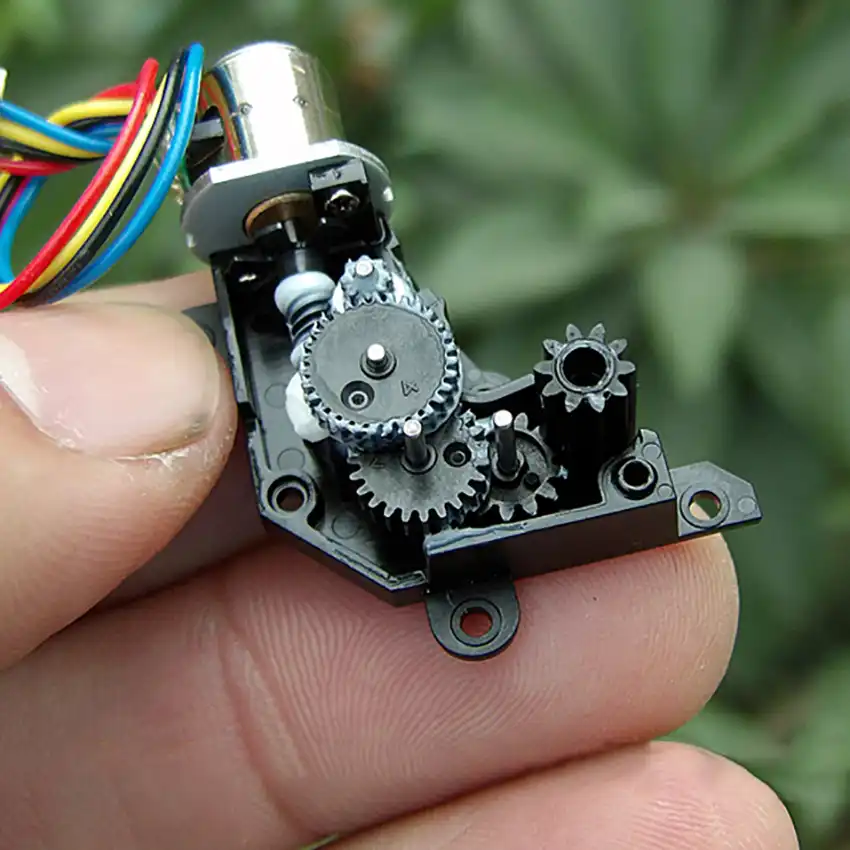
«Сервосистемы продолжают дешеветь, но пока все еще есть простые приложения для шаговых двигателей», говорит Чик. GE Fanuc является поставщиком как шаговых, так и высокопроизводительных сервосистем.
В компании Portescap (подразделение Danaher Motion) также отмечают неотъемлемую способность шаговых двигателей осуществлять позиционирование без обратной связи — при «правильном соотнесении с приложением». Это конкурентное преимущество перед системами на серводвигателях. «Открытый контур управления и улучшения двигателя делают шаговые системы рентабельными», — утверждает Дейв Бекс-тоффер, менеджер по продукции.
Например, Portescap существенно увеличил выходной крутящий момент самого нового продукта в своей линейке гибридных шаговых двигателей серии h4. Как объяснил Бекстоффер, алюминиевый корпус улучшает диссипацию энергии, замедляя нагрев мотора, который обычно со временем ухудшает крутящий момент двигателя. «Это также снижает потребление энергии, делая меньший вклад в общую потребляемую мощность шаговой системы».
Как сообщается, магниты из неодима, используемые в новых шаговых двигателях, оптимизируют плотность крутящего момента без увеличения размера блока. Согласно заявлениями Бекстоффера, редкоземельные магниты Nd-Fe-B, использовавшиеся в шаговых двигателях типа «консервная банка», раньше почти не применялись для оптимизации плотности крутящего момента в гибридных шаговых двигателях. Эти нововведения также помогают сделать двигатели тише и уменьшить резонанс. «Подшипники в шаговых двигателях серии h4 крепятся держателем и о-кольцом, что не дает подшипнику совершать аксиальные движения при работе, которые являются стандартным источником шума в шаговых двигателях», — добавляет Бекстоффер. Более крупные подшипники работают с большими боковыми и радиальными нагрузками, чем стандартные гибридные шаговые двигатели.
А где действие?
Согласно SKC, системы на шаговых двигателях находятся на равных с сервосистемами в приложениях с открытым контуром, где нет нужды в обратной связи от датчика положения — таких как упаковка, обработка материалов и сборка, а также там, где высокие скорости или ускорения не критичны. «Системы на серводвигателях работают лучше всего в нагрузочных приложениях с закрытым контуром», — добавляет Бергсма.
«Системы на серводвигателях работают лучше всего в нагрузочных приложениях с закрытым контуром», — добавляет Бергсма.
Линейные шаговые двигатели конкурентоспособны в производстве полупроводников и волоконной оптики, в станках проволочного монтажа, лазерных резаках, устройствах испытаний схем на полупроводниковой пластине, медицинском оборудовании и других приложениях, утверждают в Baldor Electric. Линейные шаговые системы часто получают высокую оценку за свою низкую стоимость обслуживания в сравнении с альтернативами.
«Недорогие шаговые решения отлично подходят для любых приложений позиционного управления, где жесткое согласование между осями не критично», — добавляет Фей из Parker. Он перечисляет тысячи таких приложений в биологии, медицине и других отраслях.
Компания MTT приводит примеры шаговых двигателей типа «консервная банка» в приложениях промышленной автоматизации, такие как манипулятор для захвата, транспортировки и установки деталей, конвейеры и станки по обработке и упаковке относительно небольшого размера.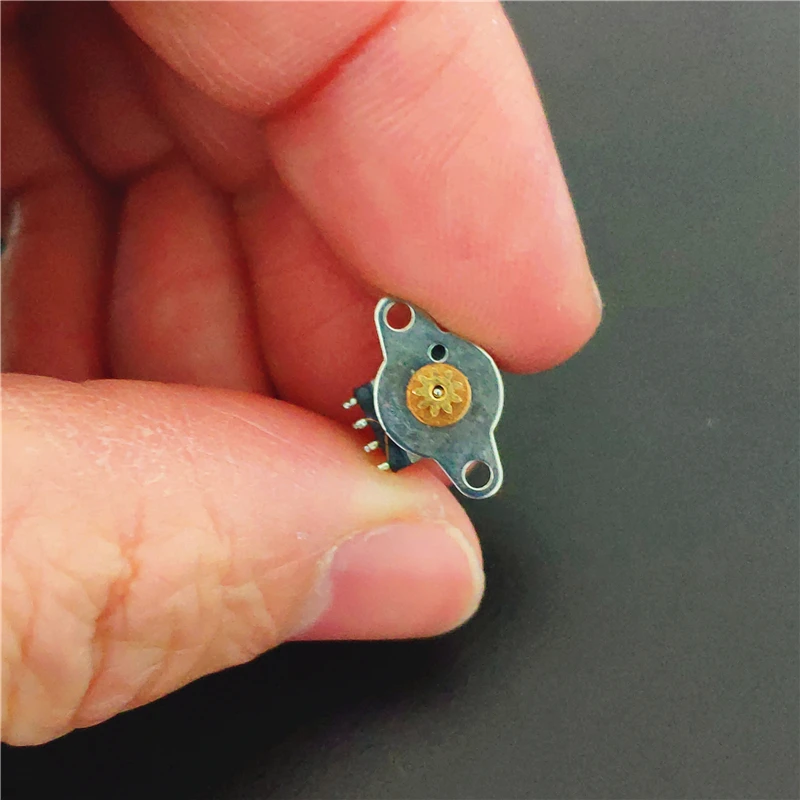
Компания Portescap считает, что шаговые двигатели больше подходят для текстильной промышленности, сборки электронных приборов, линейных координатных платформ и медицинских анализаторов. Много шаговых двигателей также используются в автомобильных приложениях, но это, как правило, полноразмерные мощные модели.
Целевыми приложениями шаговых систем, по мнению Berger Lahr/Schneider Electric, являются те, у которых очень низкие требования к поддержке, а также OEM системы с недорогими решениями по управлению движением. Поскольку для ввода в эксплуатацию шаговых систем не требуется высокой квалификации, экспортеры техники также часто отдают предпочтение им, а не системам на серводвигателях.
В целом, системы управления движением на базе шаговых двигателей живут и развиваются. Улучшения продолжаются по всему спектру предлагаемых моделей, но наиболее заметны они в компактных системах и системах с низким потреблением энергии.
Франк Дж. Бартос (Frank J. Bartos)
работает редактором-консультантом
в Control Engineering.
С ним можно связаться по адресу
[email protected]
Вконтакте
Google+
Как включить шаговый двигатель
Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол. Такие особенности сделали возможным его применение в робототехнике, станках с числовым программным управлением (ЧПУ), и других системах автоматизации. В этой статье мы рассмотрим ряд вопросов связанных с устройством шаговых двигателей и способами их управления с помощью микроконтроллера Arduino.
Шаговый двигатель отличия от обычного
Все используемые на практике электродвигатели работают за счет электродинамических явлений и процессов происходящих в магнитных полях роторов и статоров. Как мы уже упомянули, любой двигатель состоит как минимум из двух частей – подвижной (ротор) и неподвижной (статор).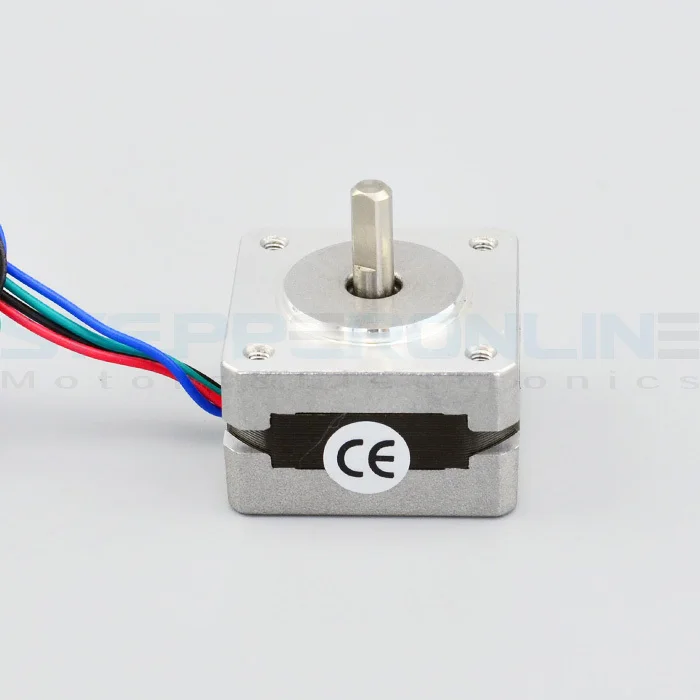 Для его вращения нужно чтобы и магнитное поле тоже вращалось. Поле ротора вращается вслед за полем статора.
Для его вращения нужно чтобы и магнитное поле тоже вращалось. Поле ротора вращается вслед за полем статора.
В принципе, таких базовых сведений достаточно для понимания общей картины работы электрических двигателей. Однако на самом деле промышленность производит различные варианты электродвигателя, среди которых:
1. Асинхронный двигатель с короткозамкнутым или с фазным ротором.
2. Синхронный двигатель с обмотками возбуждения или с постоянными магнитами.
3. Двигатель постоянного тока.
4. Универсальный коллекторный двигатель (работает и на постоянном токе и на переменном, ведь обмотки ротора сами подключаются и отключаются от контактов источника питания за счет конструкции ламелей и якоря).
5. Бесщеточные двигатели постоянного тока (BLDC).
7. Шаговые двигатели.
Последние два вида несут особую ценность, благодаря возможности их, в определенной степени, точного позиционирования в пространстве. Давайте подробнее рассмотрим конструкцию шагового двигателя.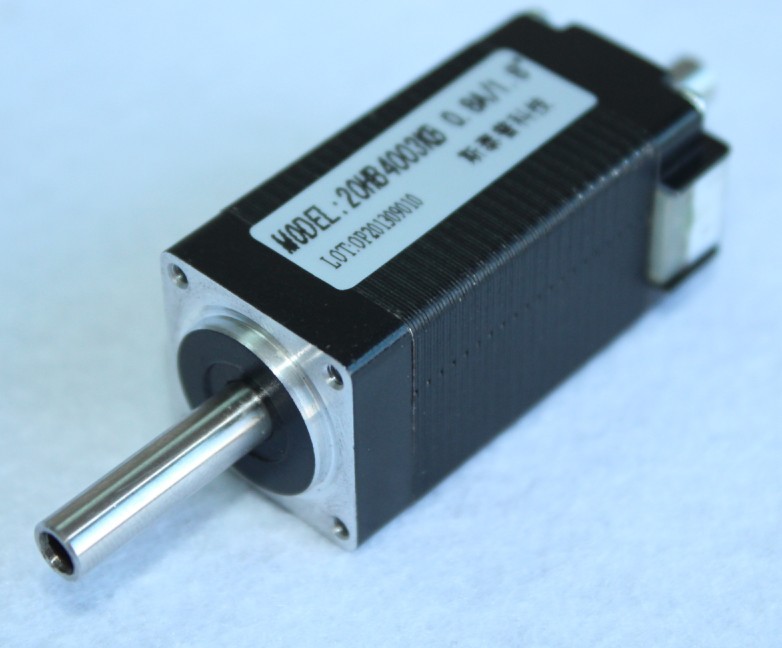
Определение
Шаговым двигателем называется бесщеточный электродвигатель синхронного типа. На статоре расположено определенное число обмоток, подключение которых вызывает поворот ротора на определенный угол, зависящий от числа шагов. Другими словами ток в обмотке статора вызывает поворот вала на дискретный угол.
При равномерной и последовательной смене полярностей напряжения на обмотках и переключении запитанных обмоток происходит вращение шагового двигателя, подобно обычному электродвигателю, хотя на самом деле просто происходит регулярный поворот на фиксированный угол.
Шаговый двигатель иногда называют двигателем с конечным количеством положений ротора. Звучит не совсем понятно, давайте разберемся. Представим обычный двигатель – положение его ротора никак не фиксируется, то есть он просто вращается пока подключено питание, а когда оно отключается, то останавливается через какое-то время, зависящее от его инерции.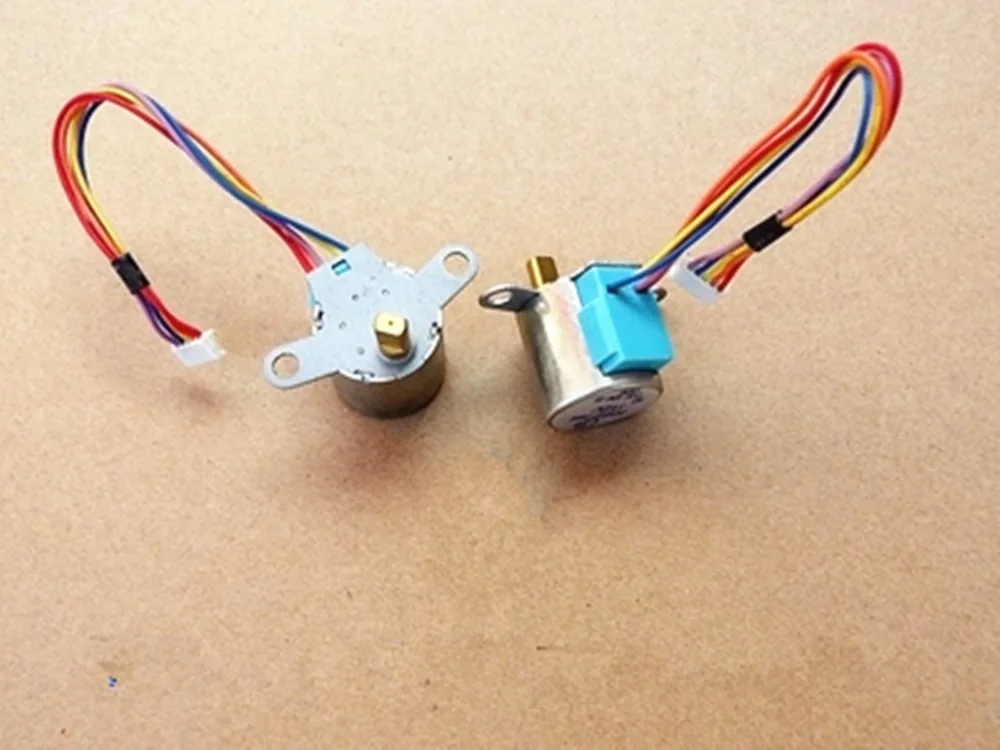 Положений ротора может быть сколько угодно много, а отличаться они могут на мельчайшие доли градуса.
Положений ротора может быть сколько угодно много, а отличаться они могут на мельчайшие доли градуса.
В шаговом двигателе подключение обмотки или нескольких обмоток вызывает «примагничивание» ротора по отношению к этим обмоткам. Внешне это выглядит именно как поворот вала на определенный угол (шаг). Так как количество шагов является одной из важных характеристик этого типа электропривода, то и количество положений ротора равно количеству шагов. Новичкам сложно понять, как это может быть, и как он в таком случае вращается – на самом деле все достаточно просто, мы это покажем на иллюстрациях и описаниях ниже.
Конструкция
На статоре электродвигателя закреплены обмотки возбуждения. Его ротор выполняется из магнитомягких или магнитотвердых материалов. От материала ротора зависит крутящий момент и фиксация вала при обесточенных обмотках. Эти параметры могут быть критичными.
Поэтому выделяют магнитотвердые роторы (они же на постоянных магнитах) и магнитомягкие (реактивные) роторы, кроме них есть и гибридные роторы.
Гибридный ротор делают зубчатым, количество зубцов соответствует количеству шагов. Зубцы расположены вдоль оси ротора. При этом такой ротор разделен на две части поперек. Между ними установлен постоянный магнит, таким образом, каждая из половин ротора является полюсом магнита. Также следует сказать, о том, что половины ротора повернуты на половину шага зубцов друг относительно друга.
Как уже было сказано, такой двигатель является синхронным, так и процесс его вращения заключается в создании вращающего поля ротора, за которым стремится магнитный ротор, а это реализовывается за счет переключения контроллером обмоток поочередно.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток:
3. С четырьмя обмотками.
Биполярные электродвигателя в большинстве своем имеют 4 контакта – это выводы с двух обмоток. Внутри двигателя они по большому счету никак не соединены между собой. Основной проблемой является то, что нужно обеспечить переключение полярности питания, это значит, что драйвер и сам процесс управления усложнится.
Униполярные напоминают соединение обмоток по схеме звезды. Другими словами, у вас есть 5 выводов – 4 из них это концы обмоток, а 1 – точка соединения всех обмоток.
Для управления таким двигателем нужно просто подавать поочередно питание на каждый из концов обмотки (или их пару, в зависимости от выбранного режима вращения), таким образом будет запитываться каждый раз половинка обмотки. Может работать в биполярном режиме, если запитывать полностью всю обмотку минуя отвод от её середины.
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель.
Режимы управления
Различают 4 основных режима управления шаговым двигателем:
1. Волновое управление.
Волновым управлением называют управление одной обмоткой. Т.е. одновременно ток течет через одну из обмоток, отсюда две отличительных черты – низкое энергопотребление (это хорошо) и низкий крутящий момент (это плохо).
В данном случае этот двигатель делает 4 шага за один оборот. Реальные же двигатели делают десятки шагов за один оборот, это достигается бОльшим количеством чередований магнитных полюсов.
Полношаговое управление является наиболее часто используемым. Здесь напряжение подается не на одну обмотку, а на две сразу. Если обмотки соединены параллельно – то ток удваивается, а если последовательно, то удваивается напряжение питания соответственно. С одной стороны в таком методе управления двигатель потребляет больше энергии, с другой – крутящий момент 100%, в отличие от предыдущего.
Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной.
Стоит учесть, что момент на валу плавает от 50 до 100% в зависимости от того 1 или 2 две обмотки задействованы в данный момент.
Еще более точным является микрошаговый. Он похож на предыдущий, но отличается тем, что питание на обмотки подаётся не полной величины, а постепенно изменяющейся. Таким образом, изменяется степень воздействия на ротор каждой из обмоток и плавно изменяется угол поворота вала в промежуточных шагам положениях.
Где взять шаговый двигатель
Купить шаговый двигатель вы успеете всегда, но настоящие радиолюбители, самодельщики и электронщики славятся тем, что могут из мусора сделать что-то полезное. Наверняка, у вас дома найдется хотя бы один шаговый двигатель. Давайте разберемся, где нужно искать, чтобы найти такой двигатель.
1. Принтера. Шаговые двигатели могут стоять на вращении вала подачи бумаги (но может быть и двигатель постоянного тока с датчиком перемещения).
2. Сканеры и МФУ. В сканерах часто устанавливают шаговый двигатель и механическую часть, направляющую вдоль которой ходит каретка, эти детали также могут стать полезны при разработке самодельного ЧПУ станка.
3. CD и DVD приводы. В них также можно достать и штанги и винтовые валы для самоделок и различных ЧПУ.
4. Floppy-дисководы. В дискетниках также есть шаговые двигатели, особо ценятся флопики формата 5.25”.
Драйвер для шагового двигателя
Для управления шаговыми двигателями используют специализированные микросхемы-драйвера. В большинстве своем это H-мост из транзисторов. Благодаря такому включению появляется возможность включать на обмотку напряжение нужной полярности. Эти микросхемы подходят и для управления двигателями постоянного тока с поддержкой изменения направления вращения.
В принципе очень маленькие двигателя можно запустить и прямо от пинов микроконтроллера, но обычно они выдают до 20-40 мА, чего в большинстве случае недостаточно. Поэтому приведем несколько примеров драйверов для шаговых двигателей:
1. Платы на базе L293D. Их множество, одна из таких продается под отечественной маркой «Амперка» под название Troyka Stepper, пример его использования в реальном проекте приведен на видео ниже. Преимущество конкретно этой платы в том, что на ней расположены микросхемы логики которые позволяют сократить количество используемых для управления пинов.
Преимущество конкретно этой платы в том, что на ней расположены микросхемы логики которые позволяют сократить количество используемых для управления пинов.
Сама по себе микросхема работает под напряжение 4.5-36В и выдает ток до 600мА-1А в зависимости от корпуса ИМС.
2. Драйвер на базе A4988. Питается напряжением до 35В, выдерживает ток до 1А без радиатора, а с радиатором до 2А. Может управлять двигателем, как целыми шагами, так и частями – от 1/16 шага до 1 шага, всего 5 вариантов. Содержит два H-моста. С помощью подстроечного резистора (видно на правом фото) можно задавать выходной ток.
Размер шага задается сигналами на входах MS1, MS2, MS3.
Вот схема его подключения, каждый импульс на входе STEP задает поворот двигателя на 1 шаг или на микрошаг.
3. Драйвер на базе ULN2003 работает с двигателями на 5 и на 12В и выдаёт ток до 500 мА. На большинстве плат расположены 4 светодиода индицирующих работу каждого из каналов.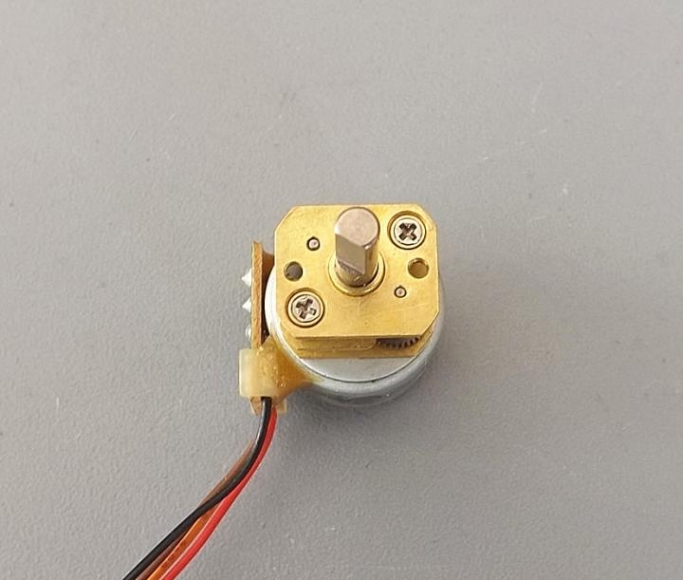
Также на плате вы можете видеть клеммную колодку для подключения двигателей, кстати, многие из них продаются именно с таким разъёмом. Примером такого двигателя является 5В модель – 28BYJ-48.
И это не все варианты драйверов для шаговых двигателей, на самом деле их еще больше.
Подключение к Arduino драйвера и шагового двигателя
В большинстве случаев нужно использовать микроконтроллер в паре с драйвером для шагового двигателя. Давайте рассмотрим схему подключения и примеры программного кода. Рассмотрим подключение на базе последнего приведенного драйвера – ULN2003 к плате Arduino. И так у него есть 4 входа, они подписаны, как IN1, IN2 и т.д. Их нужно соединить с цифровыми пинам платы ардуино, а к драйверу подсоединить моторчик как показано на рисунке ниже.
Далее в зависимости от способа управления вы должны подавать на входы 1 или 0 с этих пинов включая 1 или 2 обмотки в нужно последовательности. Код программы полношагового управления выглядит примерно так:
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами.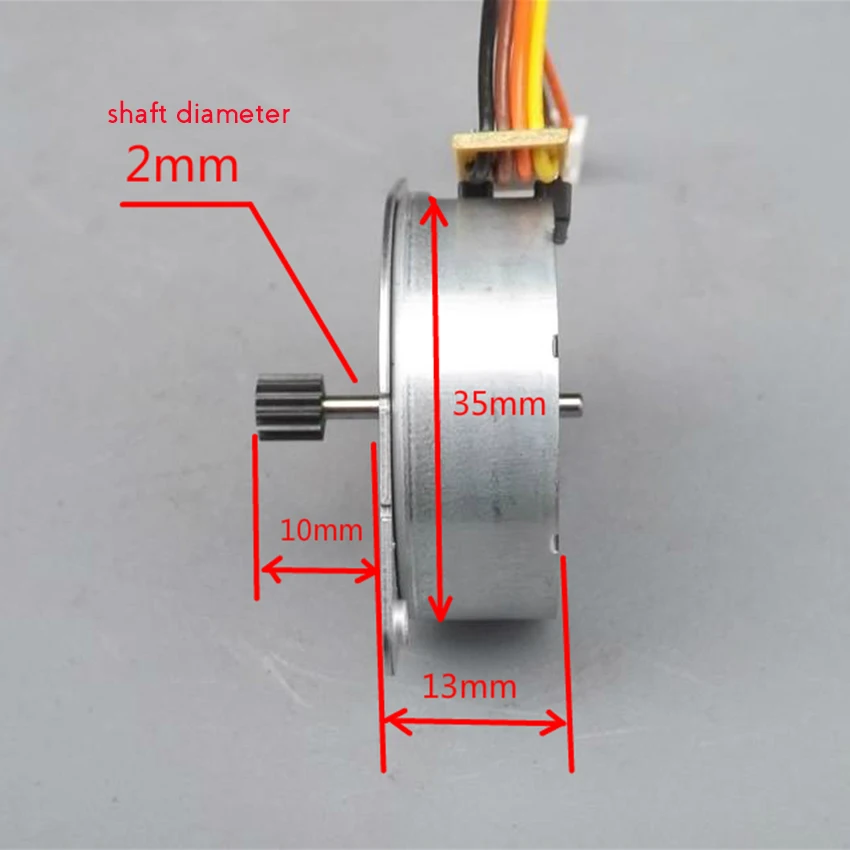 Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Читайте также: Треугольник на электрической схеме
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
Рассмотрите пример его работы на рисунке.
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
 При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.

Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.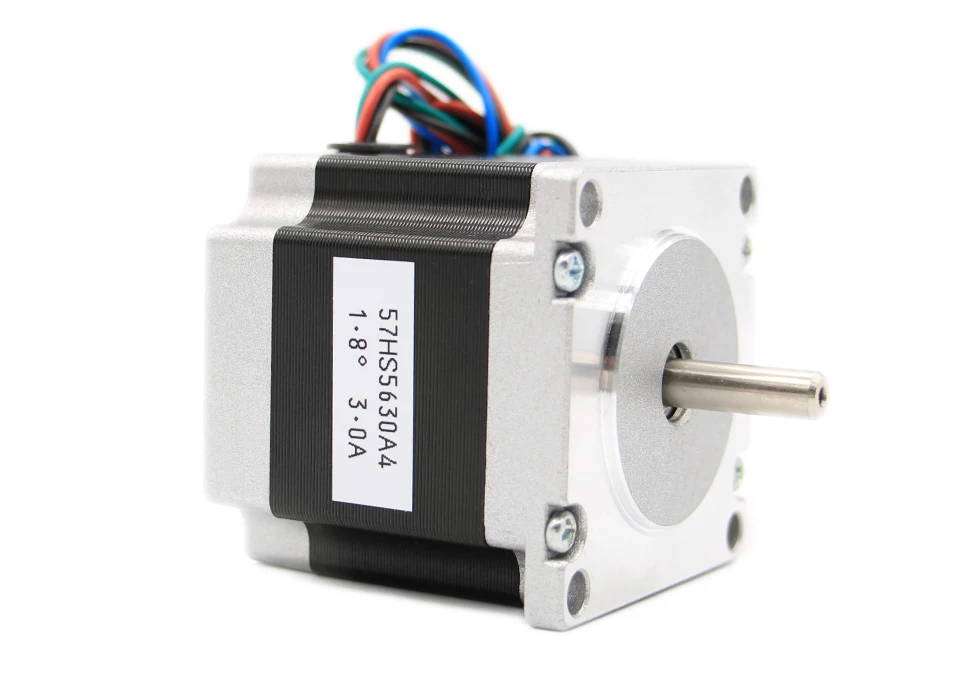
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Блог о электронике
| Первая модификация силового блока. L293 вытащена. |
| Вид снизу |
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями . Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим , когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Униполярный отличается от биполярного только тем, что ему нужна куда более простая схема управления, а еще у него значительно слабее момент. Так как работает он только половинами обмоток. НО! Если оторвать нафиг средний вывод униполярника, то мы получим обычный биполярный . Определить какой из выводов средний не сложно, достаточно прозвонить сопротивление тестером. От среднего до крайних сопротивление будет равно ровно половине сопротивления между крайних выводов.
 Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.
Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры . Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298 , подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
 Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит. Правда на будущее, когда я буду делать роботу шаговый привод, я возьму не связку L297+L293 , а микруху L6208 которая может и чуть слабей по току, но зато два в одном! Сразу подключай двигатель и работай. Если же их покупать, то на L6208 получается даже чуть дешевле.
197 thoughts on “Управление шаговым двигателем”
А можешь посоветовать шаговик из тех, которые сейчас можно купить?
Я не знаю как у всех, но я д аже двухдюймовые флопики повыкидывал лет пять назад, а 5-ти дюймовых и в помине не было.
По продаваемым не в курсе. В нашей деревне их в продаже нету, а что там в Московии я даже не знаю.
Оппа, теперь самое время разбираться, что за шаговики у меня имеются по результатам годового потрошения CD-DVD ROM’ов. 🙂
А в сидюках/дивдюках вроде бы стоят обычные коллекторники+синхронный на шпиндель. Хотя могут быть и шаговики, но я не встречал ни разу.
Шаговики во многих CD/DVD приводах стоят — для таскания каретки с лазером (у меня минимум 3 таких экземпляра валяются). Но конструкция двигателя — как в трехдюймовых дисководах, для практического применения неудачная.
ну когда я расотрошил сиди ром там был безколлекторник + еще какойто на шпиндель
для безколлекторника я думаю применение в моделизме
http://forum.rcdesign.ru/index.php?showtopic=12183&st=560
может пригодится кому
http://forum.rcdesign.ru/index.php?showtopic=12183&st=560
может чем пригодится там модельный регултор хода
может управлять сдромным безколлекторником
работал с шаговыми движками на своей фирме.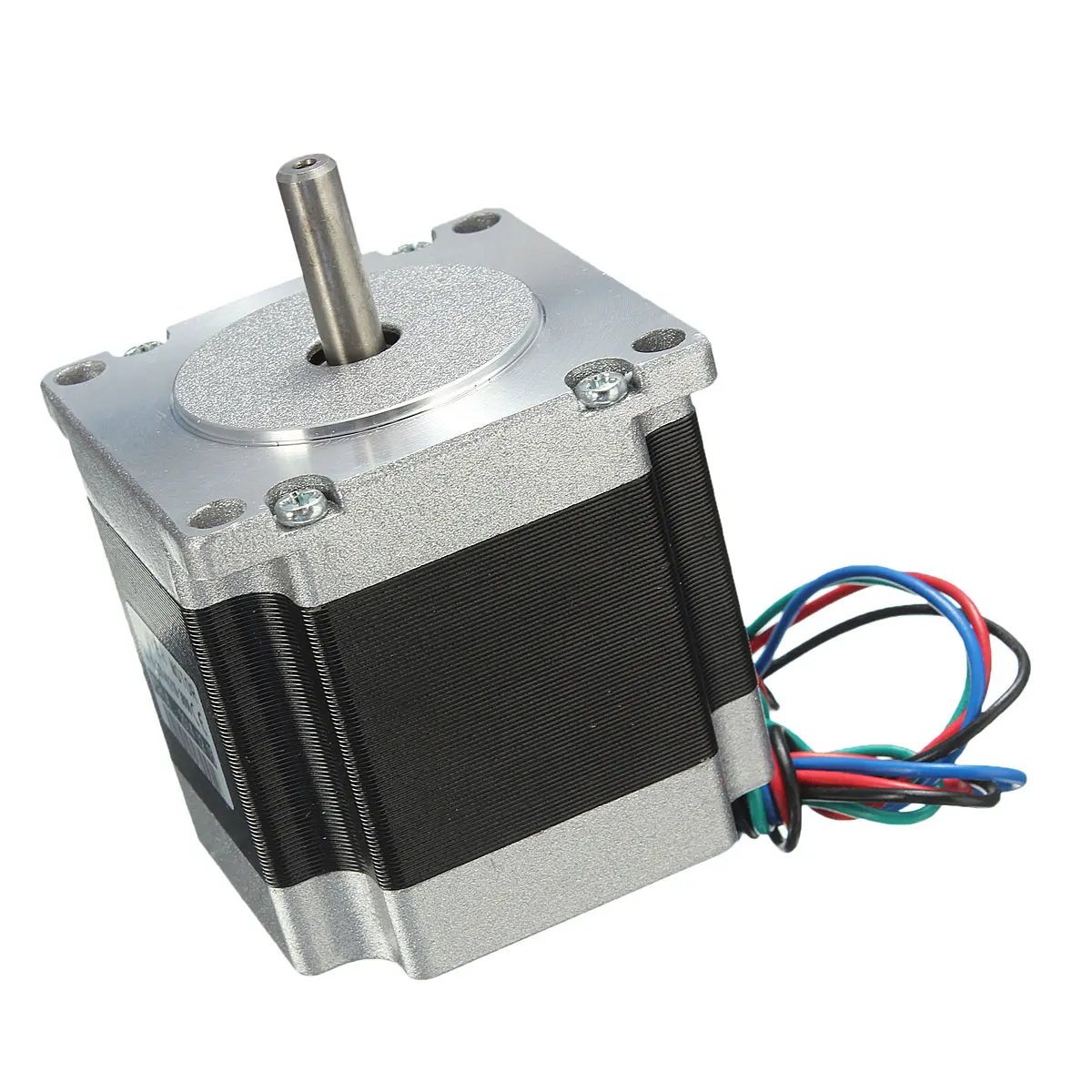
ещё с нашими совеццкими и руссийскими.
сколько раз коротыш верещал на источниках — не счесть ) единственное оправдание — я про них ещё тогда ничего не знал и доков не имел. работал методом тыка…
всё хорошо, но нету обратной связи.
зы! от постоянных замыканий избавлялись частыми переключениями обмоток, когда надо было застопорить двигло.
. в смысле от постоянных замыкани? Как ты умудрялся его коротнуть? Одновременным замыканием ключей верхнего и нижнего плеча? Так там Dead Time надо ставить!
юзал четырёхконтактный.
помню, что если подавать на обмотки долгое время неизменный сигнал, то будет такое.
хотя потом, когда пришёл паспорт на движок, то там было сказано, что можно так стопорить его.
Долгая подача напруги на обмотки это его нормальный рабочий режим. Главное чтобы напряжение было номинальным.
Полезно, спасибо. Мне в свое время довелось раскурочить 8″ дисковод. Два шаговика лежат дожидаются своего часа. Так, что информация может пригодиться.
У меня этих дисководов полтора десятка штук!
Есть интересная статья по использованию шаговых двигателей
Журнал Современная электроника Октябрь 2004 г. стр. 46-47
Автор: Олег Пушкарев, Омск, конструкция на базе PIC16F84 и
драйвера — ULN2003A. (WWW.SOEL.RU)
Журнал очень рульный, советую почитать, статьи высылают
по почте, по запросу или подписка (в том числе бесплатная).
Еще одна задача — управление двигателем
постоянного тока на 24 в (12В), реверс,
управление скоростью. Есть буржуйская схема,
но без регулятора, могу тиснуть, схема из
стриммера, реверс-технология схемы.
кто знаком с драйвером шины ULN2804a b ULN2004a , какая разници между ними.
Кажется, один для КМОП, другой — для ТТЛ. Схема отличается только номиналом сопротивления от входного штырька до базы транзистора. В одном случае — 10ком (для КМОП), в другом — кажется, 1,5 ком, точно не помню. Ну, и входные уровни соответственно разные. В остальном — одинаково. Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
У меня есть движок от древнего лазерного принтера. Двигатель фирмы CANON PM60-h518Z21B можно ли запустить таку вещь? Торчат из него по 3 провода с каждой обмотки. P.S. С шаговиками я делов не имел пока, но очень интересно.
Думаю без проблем. Судя по признакам это униполярный двигатель. Так что определяй где у него середина обмотки и дальше как я описал. Тока замерь сопротивление, чтобы узнать максимальный ток.
“>
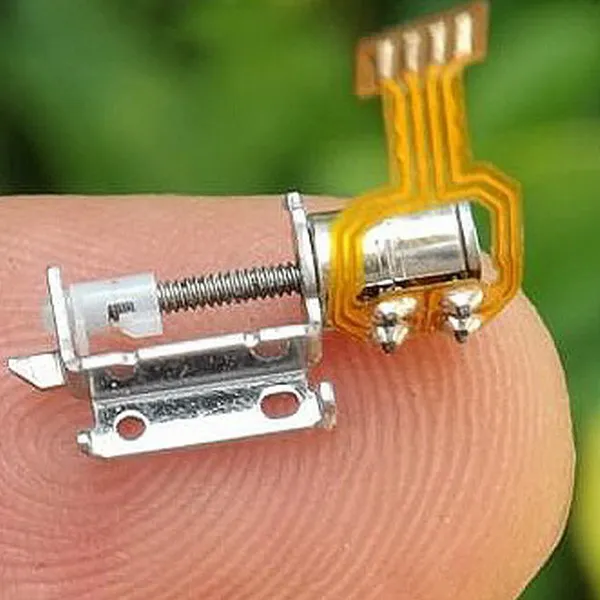
1 шт. мини микро шаговый двигатель 8×9,2 мм маленький 2 фазный 4 проводной шаговый двигатель с медной шестерней для деталей двигателя|Шаговый двигатель|
BI0006255
Параметры:
Абсолютно новый
Диаметр шагового двигателя: прибл. 8 мм
Высота: прибл. 9,2 мм
Выходной вал: прибл. 0,8 мм
Длина выходного вала: прибл. 4 мм
Выше с медным наружный диаметр 1,8 мм Шестерни
Тонкая работа и хорошая производительность.
Простой в использовании.
Длительный срок службы.
Посылка включает в себя:
Примечание:
Возможны незначительные погрешности в размере из-за ручного измерения.
Цвет товара на фотографиях может слегка отличаться на разных мониторах компьютера так как мониторы откалиброваны по-разному.
EMS, DHL, FEDEX, UPS доступны со скидкой.
Ваш заказ будет отправлен через способ доставки продавца без номера отслеживания, и вы получите ваш
Товары в течениеРазмеры: 39-60Дней, пожалуйста, терпеливо ждите вашего посылка.
Если вы хотите номер отслеживания, пожалуйста, Оплатите стоимость авиапочты Китая.
Moveover, быстрая доставка EMS, DHL,FEDEX потратит 5-15 рабочих дней, чтобы получить ваши товары, спасибо.
Если транспортная компания не отправляет итерам в вашу страну.
Свяжитесь с нами по электронной почте или через торгового менеджера Ali. Мы сделаем все возможное, чтобы помочь вам!
Ваше удовлетворение и положительные отзывы очень важны для нас. Пожалуйста, оставьте положительные отзывы и 5 звезд, если вы удовлетворены нашими товарами и обслуживанием.
Если у вас возникли какие-либо проблемы с нашими товарами или обслуживанием, свяжитесь с нами перед тем, как оставить отрицательный отзыв, и мы сделаем все от нас зависящее, чтобы решить проблемы и предоставить вам лучший сервис.
Ваша поддержка и поддержка-это наш непрерывный импульс.
Большое спасибо!
С наилучшими пожеланиями!
Привод шагового двигателя от Raspberry Pi
L293D не может выдержать 1,5 ампер на катушку, в которых нуждается указанный шаговый двигатель. В то время как L293D определяет тепловую защиту в спецификации, это не является надежной защитой. Справедливо поспорить, что микросхема была повреждена из-за перегрузки .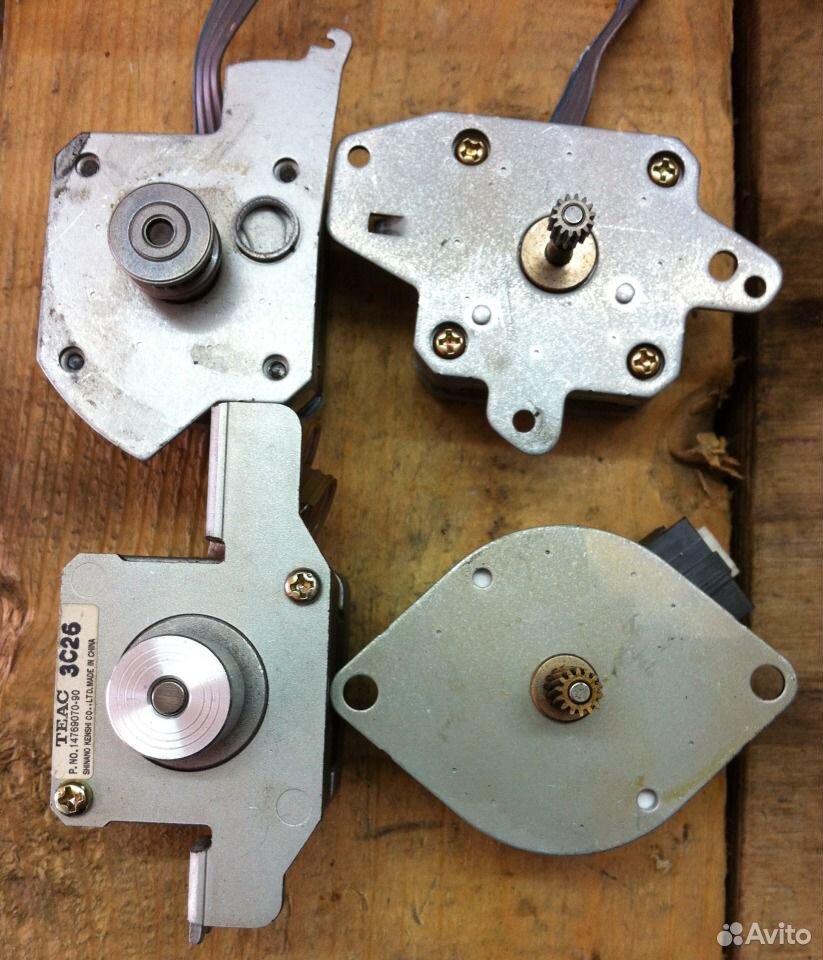
Другая, более сильная возможность, заключается в том, что противо-ЭДС от катушек при каждом их отключении повреждает защитные диоды L293D, что впоследствии приводит к возгоранию схемы драйвера. Использование драйвера Н-моста для сильноточной индуктивной нагрузки (приводные катушки 1,5 А большого шагового двигателя) без внешних защитных диодов = самоубийство кремния — просто не делайте этого, независимо от того, что говорится в руководствах. Внутренние защитные диоды не предназначены для рассеивания сильноточных переходных процессов.
Решение:
- Вместо L293D используйте две микросхемы SN754410, соединенные параллельно , с радиаторами на каждом, для привода шагового двигателя: каждый SN754410 рассчитан на 1 Ампер на линию привода, и они хорошо работают параллельно. Хорошо оставаться в пределах примерно 75% от номинального тока этих полугодовых драйверов, поэтому с двумя из них будет работать ток 1,5 А на катушку.
Добавьте защитные диоды, такие как диоды Шоттки 1n5817 , в обратной полярности, к каждой из выходных линий, таким образом:
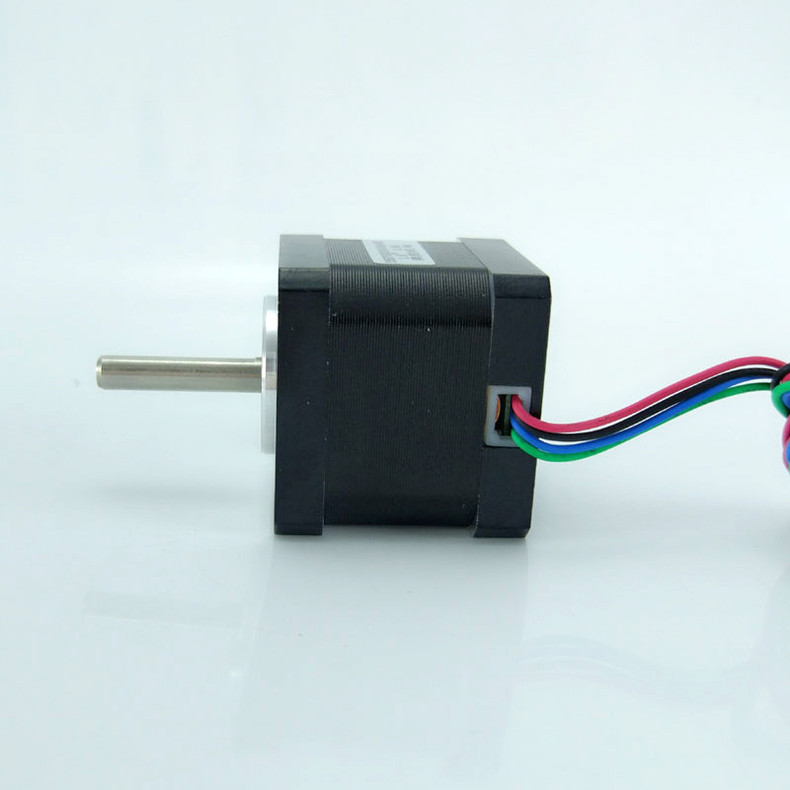
смоделировать эту схему — схема, созданная с использованием CircuitLab
- Обратите внимание также на электролитический конденсатор на 10 мкФ и конденсатор на 100 нФ, показанные между каждой из линий Vcc и заземляющими контактами. Эти развязывающие конденсаторы должны быть добавлены в вашу цепь как можно ближе к соответствующим контактам микросхемы, чтобы предотвратить попадание значительных шумовых импульсов в линии питания каждый раз, когда драйвер включает или выключает катушки шагового двигателя. Полярность электролитического конденсатора имеет решающее значение: отрицательная сторона идет в линию заземления в каждом случае.
- Наконец, убедитесь, что все контакты заземления соединены вместе и с заземлением источника питания, предпочтительно с толстыми следами. Эти штифты служат как путями возврата земли, так и радиаторами; Отсутствие их подключения снижает способность микросхемы избавляться от тепла во время работы.
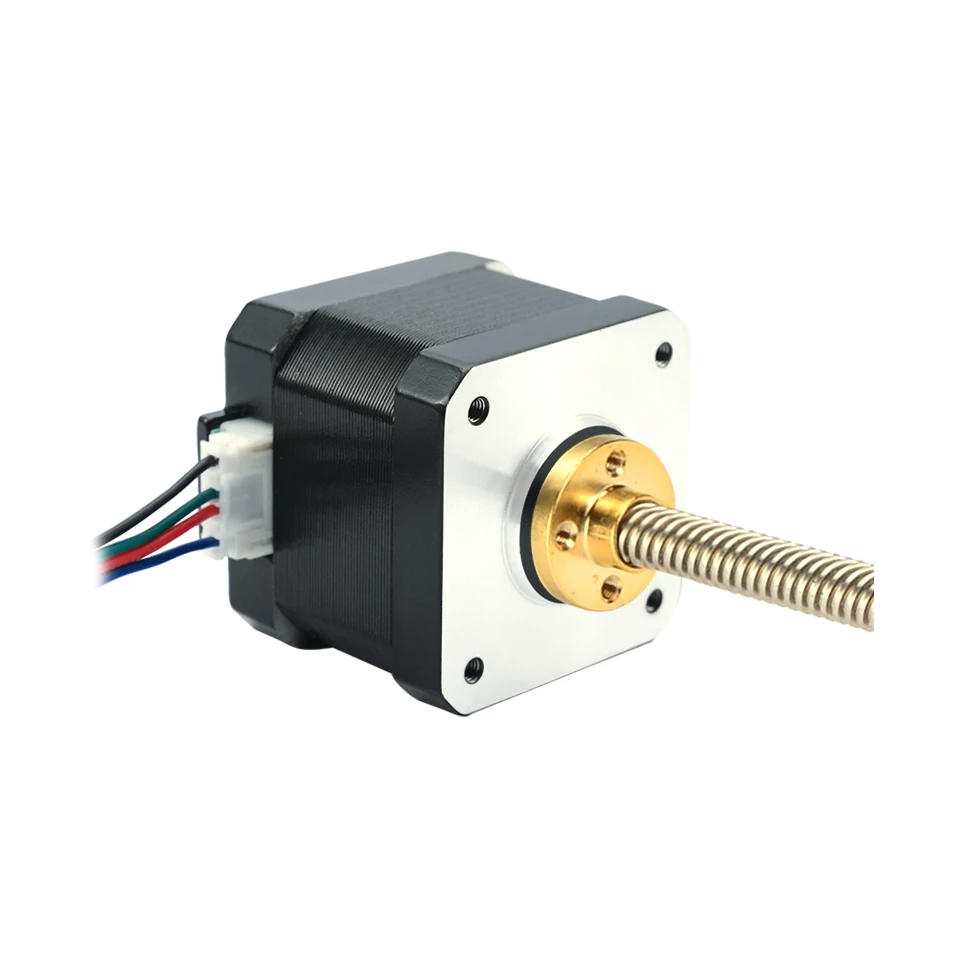 Эти штифты служат как путями возврата земли, так и радиаторами; Отсутствие их подключения снижает способность микросхемы избавляться от тепла во время работы.
Эти штифты служат как путями возврата земли, так и радиаторами; Отсутствие их подключения снижает способность микросхемы избавляться от тепла во время работы.Общепринятый подход для любителей параллельного подключения драйверов L293D или SN754410 состоит в том, чтобы физически сложить их один над другим и спаять соответствующие контакты. Смотрите эту страницу для описания этой стратегии:
Озабоченность этим подходом заключается в том, что тепловыделение нижней ИС в блоке будет слабым, поэтому потребуется дальнейшее снижение мощности — или более низкая ИС будет перегреваться и умирать, если применение шагового двигателя требует постоянной работы на полную мощность. нагрузить. Поэтому это не рекомендуется, если возможно параллельное соединение.
Миниатюрный шаговый двигатель Sanyo: биполярный, 200 шагов / оборот, 14 × 30 мм, 6,3 В, 0,3 А / фаза, двойной вал
Провода биполярного шагового двигателя заканчиваются неизолированными выводами. |
|---|

Схема подключения биполярного шагового двигателя Sanyo. |
|---|
Обзор
Этот крошечный биполярный шаговый двигатель от Sanyo имеет угол шага 1,8 ° (200 шагов / оборот) и доступен с одним или двумя валами.Каждая фаза потребляет 300 мА при 6,3 В, что обеспечивает удерживающий момент 66 г-см (0,92 унции на дюйм). Двигатель имеет четыре провода с цветовой кодировкой, оканчивающиеся оголенными выводами: красный и желтый подключаются к одной катушке; оранжевый и синий соединяются друг с другом. Им можно управлять с помощью пары подходящих H-мостов (по одному на каждую катушку), но мы рекомендуем использовать драйвер биполярного шагового двигателя или один из наших контроллеров шагового двигателя Tic. В частности, Tics упрощают управление, поскольку они поддерживают шесть различных интерфейсов (USB, последовательный TTL, I²C, RC, аналоговые напряжения и квадратурный энкодер) и настраиваются через USB с помощью нашей бесплатной утилиты конфигурации.
Наша универсальная монтажная ступица 4 мм может использоваться для крепления предметов на выходном валу шагового двигателя диаметром 4 мм.
Технические характеристики
- Размер: 14 мм квадрат × 30 мм, без вала
- Вес: 27 г (одинарный вал) или 28 г (двойной вал)
- Диаметр вала: 4 мм
- Шагов на оборот: 200
- Номинальный ток: 300 мА на катушку
- Номинальное напряжение: 6,3 В
- Сопротивление: 21 Ом на катушку
- Удерживающий момент: 66 г-см (0.92 унции в дюймах)
- Индуктивность: 4,2 мГн на катушку
- Длина провода: 30 см (12 ″)
- Выходной вал на двух шарикоподшипниках
Дополнительные технические характеристики доступны в таблице данных (125 Кб pdf).
Размеры
На следующей диаграмме показаны размеры шагового двигателя в мм. Этот мотор имеет длину 30 мм. Выходной вал имеет длину 15 мм и диаметр 4 мм. Второй вал сдвоенной версии имеет длину 10 мм и диаметр 4 мм.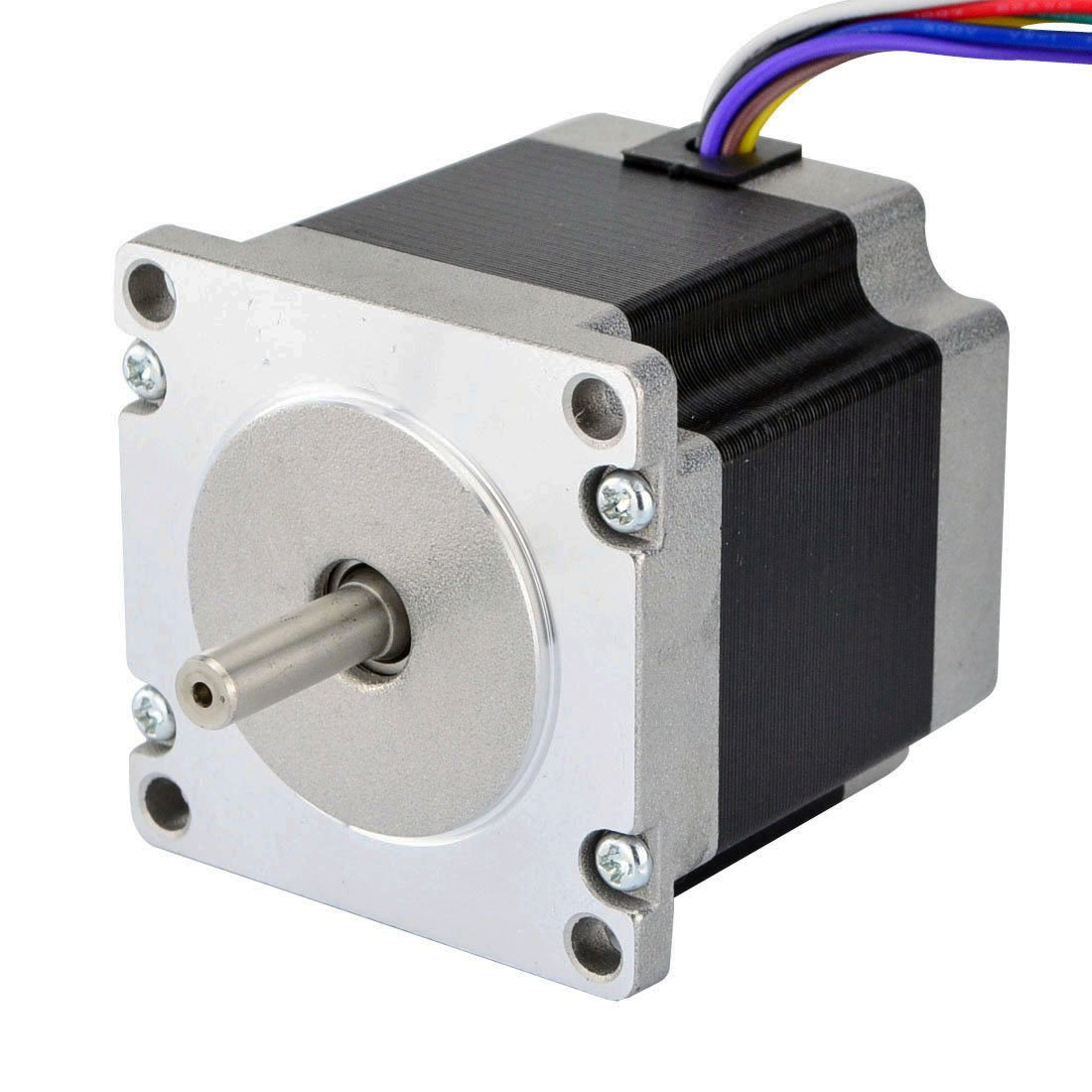 Этот вал работает с нашей универсальной монтажной ступицей 4 мм.
Этот вал работает с нашей универсальной монтажной ступицей 4 мм.
Внутри биполярного шагового двигателя (размер SOYO NEMA 14). |
|---|
Применение шагового двигателя
Шаговые двигателиобычно используются в различных приложениях, где требуется точное управление положением, а стоимость или сложность системы управления с обратной связью неоправданна. Вот несколько приложений, где часто встречаются шаговые двигатели:
- Принтеры
- Станки с ЧПУ
- 3D-принтер / прототипы машин (e.грамм. RepRap)
- Станки лазерной резки
- Машины для подбора и размещения
- Линейные приводы
- Жесткие диски
Шаговые двигатели Sanyo; слева направо: одинарный вал 14 мм, 42 × 18,6 мм, 50 × 11 мм, двойной вал 14 мм |
|---|
Примечание: Компания Sanyo Denki называет этот продукт «2-фазный шаговый двигатель малого размера SANMOTION F2, модель Sh3141-5541.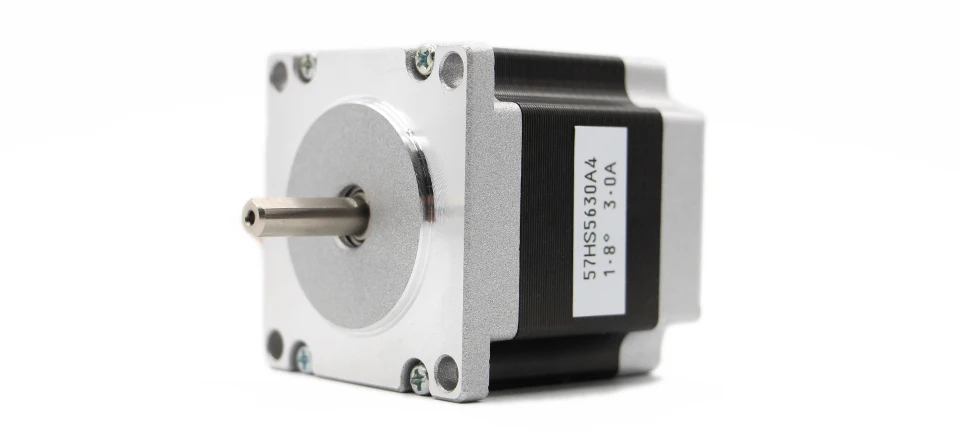 »И« Ш3141-5511 ».
»И« Ш3141-5511 ».
Люди часто покупают этот товар вместе с:
Pololu — Шаговые двигатели
Сравнить все товары в этой категории
Товары в категории «Шаговые двигатели»
Этот небольшой гибридный биполярный шаговый двигатель NEMA 8-го размера имеет 1.Угол шага 8 ° (200 шагов / оборот). Каждая фаза потребляет 600 мА при 3,9 В, что обеспечивает удерживающий момент 180 г-см (2,5 унции на дюйм). При весе 60 г это один из самых маленьких шаговых двигателей, которые мы носим.
Этот гибридный биполярный шаговый двигатель размера NEMA 11 имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 670 мА при 3,8 В, что обеспечивает удерживающий момент 600 г / см (8,3 унции).
Этот гибридный биполярный шаговый двигатель размера NEMA 11 имеет угол шага 1,8 ° (200 шагов / оборот).Каждая фаза потребляет 670 мА при 4,5 В, обеспечивая удерживающий момент 950 г-см (13 унций на дюйм).
Этот гибридный биполярный шаговый двигатель размера NEMA 14 имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 280 мА при 7,4 В, что обеспечивает удерживающий момент 650 г-см (9 унций на дюйм).
Этот гибридный биполярный шаговый двигатель размера NEMA 14 имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 500 мА при 10 В, что обеспечивает удерживающий момент 1 кг-см (14 унций на дюйм).
Этот гибридный биполярный шаговый двигатель NEMA 14 размера имеет 1.Угол шага 8 ° (200 шагов / оборот). Каждая фаза потребляет 1 А при 2,7 В, что обеспечивает удерживающий момент 1,4 кг-см (20 унций на дюйм).
Этот гибридный биполярный шаговый двигатель размером 17 NEMA имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 1,7 А при 2,8 В, что обеспечивает удерживающий момент 3,7 кг-см (51 унцию-дюйм).
Этот гибридный биполярный шаговый двигатель NEMA 17 размера имеет встроенный стержень с резьбой 18 см (7 ″) в качестве выходного вала, что превращает его в линейный привод, способный к точному позиционированию без обратной связи. Входящая в комплект ходовая гайка имеет четыре монтажных отверстия и перемещается на 40 мкм (1,6 мил) за полный шаг; Более высокое разрешение может быть достигнуто с помощью микрошага. Шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1,7 А при 2,8 В, обеспечивая удерживающий момент 3,7 кг-см (51 унцию-дюйм).
Входящая в комплект ходовая гайка имеет четыре монтажных отверстия и перемещается на 40 мкм (1,6 мил) за полный шаг; Более высокое разрешение может быть достигнуто с помощью микрошага. Шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1,7 А при 2,8 В, обеспечивая удерживающий момент 3,7 кг-см (51 унцию-дюйм).
Этот гибридный биполярный шаговый двигатель NEMA 17 размера имеет встроенный стержень с резьбой 28 см (11 ″) в качестве выходного вала, что превращает его в линейный привод, способный к точному позиционированию без обратной связи.Входящая в комплект ходовая гайка имеет четыре монтажных отверстия и перемещается на 40 мкм (1,6 мил) за полный шаг; Более высокое разрешение может быть достигнуто с помощью микрошага. Шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1,7 А при 2,8 В, обеспечивая удерживающий момент 3,7 кг-см (51 унцию-дюйм).
Этот гибридный биполярный шаговый двигатель NEMA 17 размера имеет встроенный стержень с резьбой 38 см (15 ″) в качестве выходного вала, что превращает его в линейный привод, способный к точному позиционированию без обратной связи.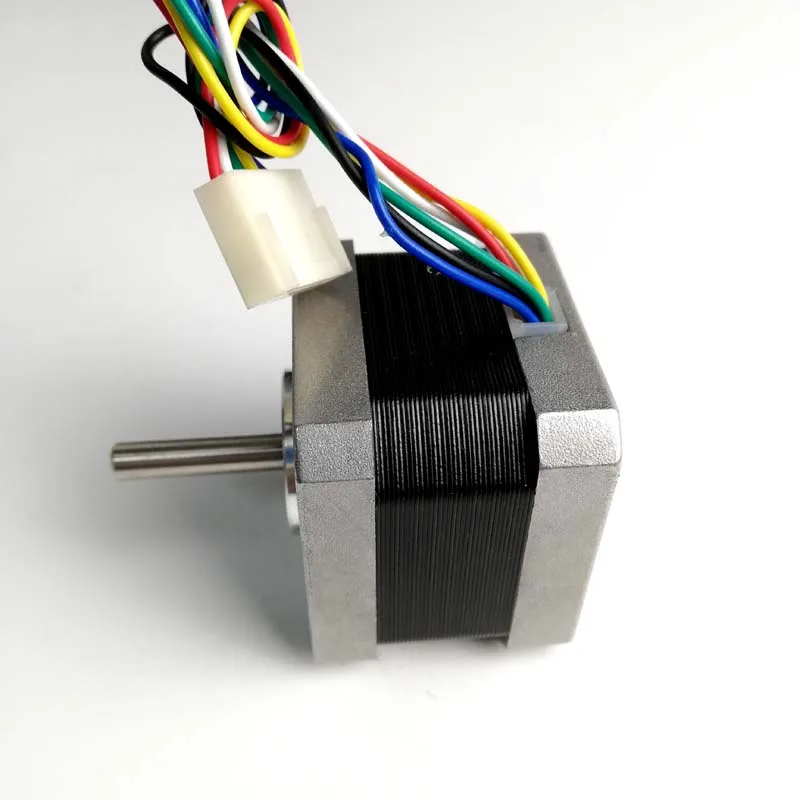 Входящая в комплект ходовая гайка имеет четыре монтажных отверстия и перемещается на 40 мкм (1,6 мил) за полный шаг; Более высокое разрешение может быть достигнуто с помощью микрошага. Шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1,7 А при 2,8 В, обеспечивая удерживающий момент 3,7 кг-см (51 унцию-дюйм).
Входящая в комплект ходовая гайка имеет четыре монтажных отверстия и перемещается на 40 мкм (1,6 мил) за полный шаг; Более высокое разрешение может быть достигнуто с помощью микрошага. Шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1,7 А при 2,8 В, обеспечивая удерживающий момент 3,7 кг-см (51 унцию-дюйм).
Этот гибридный шаговый двигатель NEMA 17 размера может использоваться как униполярный или биполярный шаговый двигатель и имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 1,2 А при 4 В, что обеспечивает удерживающий момент 3.2 кг-см (44 унции на дюйм).
Этот гибридный шаговый двигатель NEMA 23 размера может использоваться как униполярный или биполярный шаговый двигатель и имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 1 А при 5,7 В, что обеспечивает удерживающий момент 4 кг-см (55 унций на дюйм).
Этот гибридный шаговый двигатель NEMA 23 размера может использоваться как униполярный или биполярный шаговый двигатель и имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 1 А при 7,4 В, что обеспечивает удерживающий момент 9 кг-см (125 унций на дюйм).
Каждая фаза потребляет 1 А при 7,4 В, что обеспечивает удерживающий момент 9 кг-см (125 унций на дюйм).
Этот гибридный шаговый двигатель NEMA 23 размера может использоваться как униполярный или биполярный шаговый двигатель и имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 2 А при 3,6 В, что обеспечивает удерживающий момент 9 кг-см (125 унций на дюйм).
Этот гибридный биполярный шаговый двигатель типоразмера NEMA 23 имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 2,8 А при 2,5 В, что обеспечивает удерживающий момент 13 кг-см (180 унций).
Этот гибридный шаговый двигатель NEMA 23 размера может использоваться как униполярный или биполярный шаговый двигатель и имеет 1.Угол шага 8 ° (200 шагов / оборот). Каждая фаза потребляет 1 А при 8,6 В, что обеспечивает удерживающий момент 14 кг-см (190 унций на дюйм).
Этот гибридный шаговый двигатель NEMA 23 размера может использоваться как униполярный или биполярный шаговый двигатель и имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 2 А при 4,5 В, что обеспечивает удерживающий момент 14 кг-см (190 унций).
Каждая фаза потребляет 2 А при 4,5 В, что обеспечивает удерживающий момент 14 кг-см (190 унций).
Этот гибридный биполярный шаговый двигатель типоразмера NEMA 23 имеет угол шага 1,8 ° (200 шагов / оборот). На каждой фазе разыгрывается 2.8 А при 3,2 В, с учетом удерживающего момента 19 кг-см (270 унций на дюйм).
Этот крошечный биполярный шаговый двигатель от Sanyo имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 300 мА при 6,3 В, что обеспечивает удерживающий момент 66 г-см (0,92 унции на дюйм). При весе всего 27 г это самый маленький шаговый двигатель, который мы носим.
Этот крошечный двухвальный биполярный шаговый двигатель от Sanyo имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 300 мА при 6.3 В, с учетом удерживающего момента 66 г-см (0,92 унции на дюйм). При весе 28 г это самый маленький шаговый двигатель, который мы носим.
Биполярный шаговый двигатель NEMA 17 размера от Sanyo имеет угол шага 1,8 ° (200 шагов / оборот).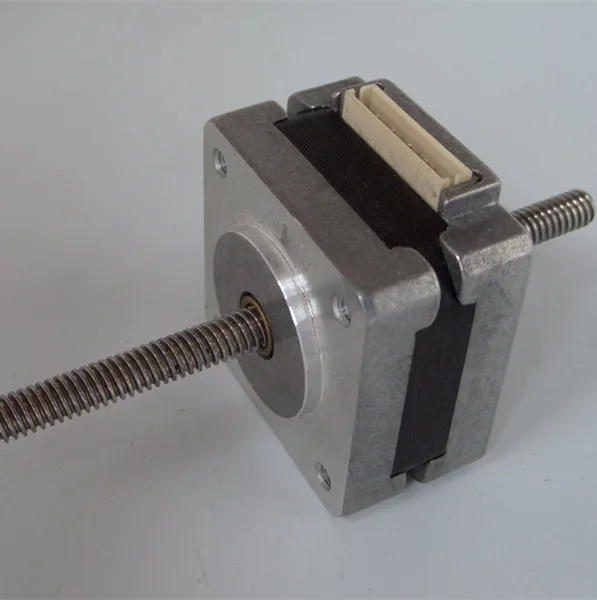 Он обеспечивает удерживающий момент 850 г-см (12 унций на дюйм), а каждая фаза потребляет 1 А при 3,5 В. Плоский профиль этого шагового двигателя (18,6 мм, включая вал) позволяет использовать его в местах, где используются более традиционные шаговые двигатели. моторы были бы слишком громоздкими.
Он обеспечивает удерживающий момент 850 г-см (12 унций на дюйм), а каждая фаза потребляет 1 А при 3,5 В. Плоский профиль этого шагового двигателя (18,6 мм, включая вал) позволяет использовать его в местах, где используются более традиционные шаговые двигатели. моторы были бы слишком громоздкими.
Этот биполярный шаговый двигатель NEMA 17-го размера от Sanyo оснащен встроенным квадратурным энкодером с высоким разрешением (1000 P / R), который позволяет производить 4000 отсчетов на оборот выходного вала при подсчете обоих фронтов обоих каналов.Сам шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1 А при 3,5 В, обеспечивая удерживающий момент 0,85 кг-см (12 унций на дюйм).
Биполярный шаговый двигатель NEMA 17 размера от Sanyo имеет угол шага 1,8 ° (200 шагов / оборот). Он обеспечивает удерживающий момент 1,9 кг-см (26 унций-дюймов), а каждая фаза потребляет 1 А при 5,4 В. Плоский профиль этого шагового двигателя (25,6 мм, включая вал) позволяет использовать его в местах, где используются более традиционные шаговые двигатели. моторы были бы слишком громоздкими.
моторы были бы слишком громоздкими.
Этот биполярный шаговый двигатель NEMA 17-го размера от Sanyo оснащен встроенным квадратурным энкодером с высоким разрешением (1000 P / R), который позволяет производить 4000 отсчетов на оборот выходного вала при подсчете обоих фронтов обоих каналов. Сам шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот), и каждая фаза потребляет 1 А при 5,4 В, обеспечивая удерживающий момент 1,9 кг-см (26 унций на дюйм).
Этот биполярный шаговый двигатель от Sanyo имеет 1.Угол шага 8 ° (200 шагов / оборот). Он обеспечивает удерживающий момент 1 кг-см (14 унций на дюйм), а каждая фаза потребляет 1 А при 4,5 В. Плоский профиль этого шагового двигателя (16 мм, включая вал) позволяет использовать его в местах, где используются более традиционные шаговые двигатели. моторы были бы слишком громоздкими.
Этот биполярный шаговый двигатель от Sanyo имеет угол шага 1,8 ° (200 шагов / оборот). Он обеспечивает удерживающий момент 2,2 кг-см (30 унций на дюйм), а каждая фаза потребляет 1 А при 5,9 В. Плоский профиль этого шагового двигателя (21 мм, включая вал) позволяет использовать его в местах, где используются более традиционные шаговые двигатели. моторы были бы слишком громоздкими.
Плоский профиль этого шагового двигателя (21 мм, включая вал) позволяет использовать его в местах, где используются более традиционные шаговые двигатели. моторы были бы слишком громоздкими.
: биполярный, 200 шагов / оборот, 20 × 30 мм, 3,9 В, 0,6 А / фаза
Провода биполярного шагового двигателя оканчиваются неизолированными выводами. |
|---|
Схема подключения биполярного шагового двигателя. |
|---|
Обзор
Этот небольшой гибридный биполярный шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 600 мА при 3.9 В, с учетом удерживающего момента 180 г-см (2,5 унции на дюйм). Двигатель имеет четыре цветных провода с оголенными выводами: черный и зеленый подключаются к одной катушке; красный и синий соединяются друг с другом. Эти выводы подключаются к шаговому двигателю через съемный разъем JST-ZHR-5. Двигателем можно управлять с помощью пары подходящих H-мостов (по одному на каждую катушку), но мы рекомендуем использовать драйвер биполярного шагового двигателя или один из наших контроллеров шагового двигателя Tic. В частности, Tics упрощают управление, поскольку они поддерживают шесть различных интерфейсов (USB, последовательный TTL, I²C, RC, аналоговые напряжения и квадратурный энкодер) и настраиваются через USB с помощью нашей бесплатной утилиты конфигурации.
Двигателем можно управлять с помощью пары подходящих H-мостов (по одному на каждую катушку), но мы рекомендуем использовать драйвер биполярного шагового двигателя или один из наших контроллеров шагового двигателя Tic. В частности, Tics упрощают управление, поскольку они поддерживают шесть различных интерфейсов (USB, последовательный TTL, I²C, RC, аналоговые напряжения и квадратурный энкодер) и настраиваются через USB с помощью нашей бесплатной утилиты конфигурации.
Наша универсальная монтажная ступица 4 мм может использоваться для крепления предметов на выходном валу шагового двигателя диаметром 4 мм.
Технические характеристики
- Размер: 20 мм квадрат × 30 мм, без вала (NEMA 8)
- Вес: 60 г (2 унции)
- Диаметр вала: 4 мм «D»
- Шагов на оборот: 200
- Номинальный ток: 600 мА на катушку
- Номинальное напряжение: 3,9 В
- Сопротивление: 6,5 Ом на катушку
- Удерживающий момент: 180 г-см (2.5 унций на дюйм)
- Индуктивность: 1,7 мГн на катушку
- Длина провода: 30 см (12 ″)
- Выходной вал на двух шарикоподшипниках
Дополнительные технические характеристики доступны в таблице данных (51 КБ pdf).
Размеры
На следующей диаграмме показаны размеры шагового двигателя в мм. Размер с надписью «Длина» составляет 30 мм. Выходной D-вал имеет длину 15 мм и диаметр 4 мм с сечением, сплющенным на 0,5 мм. Этот вал работает с нашей универсальной монтажной ступицей 4 мм.
Внутри биполярного шагового двигателя (размер SOYO NEMA 14). |
|---|
Применение шагового двигателя
Шаговые двигателиобычно используются в различных приложениях, где требуется точное управление положением, а стоимость или сложность системы управления с обратной связью неоправданна. Вот несколько приложений, где часто встречаются шаговые двигатели:
- Принтеры
- Станки с ЧПУ
- 3D-принтер / прототипы машин
- Станки лазерной резки
- Машины для подбора и размещения
- Линейные приводы
- Жесткие диски
Ассортимент шаговых двигателей Pololu. |
|---|

Примечание: Этот шаговый двигатель имеет номер детали SOYO SY20STh40-0604A.
Люди часто покупают этот товар вместе с:
Шаговый двигатель: униполярный / биполярный, 200 шагов / оборот, 42 × 48 мм, 4 В, 1,2 А / фаза
Обзор
Этот гибридный шаговый двигатель имеет угол шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 1,2 А при 4 В, что обеспечивает удерживающий момент 3,2 кг-см (44 унции на дюйм). Двигатель имеет шесть проводов с цветовой кодировкой, оканчивающихся оголенными выводами, что позволяет управлять им как униполярными, так и биполярными драйверами шаговых двигателей.При использовании с драйвером униполярного шагового двигателя используются все шесть выводов. При использовании с драйвером биполярного шагового двигателя желтый и белый провода центрального отвода можно оставить отсоединенными (красно-синяя пара дает доступ к одной катушке, а черно-зеленая пара дает доступ к другой катушке).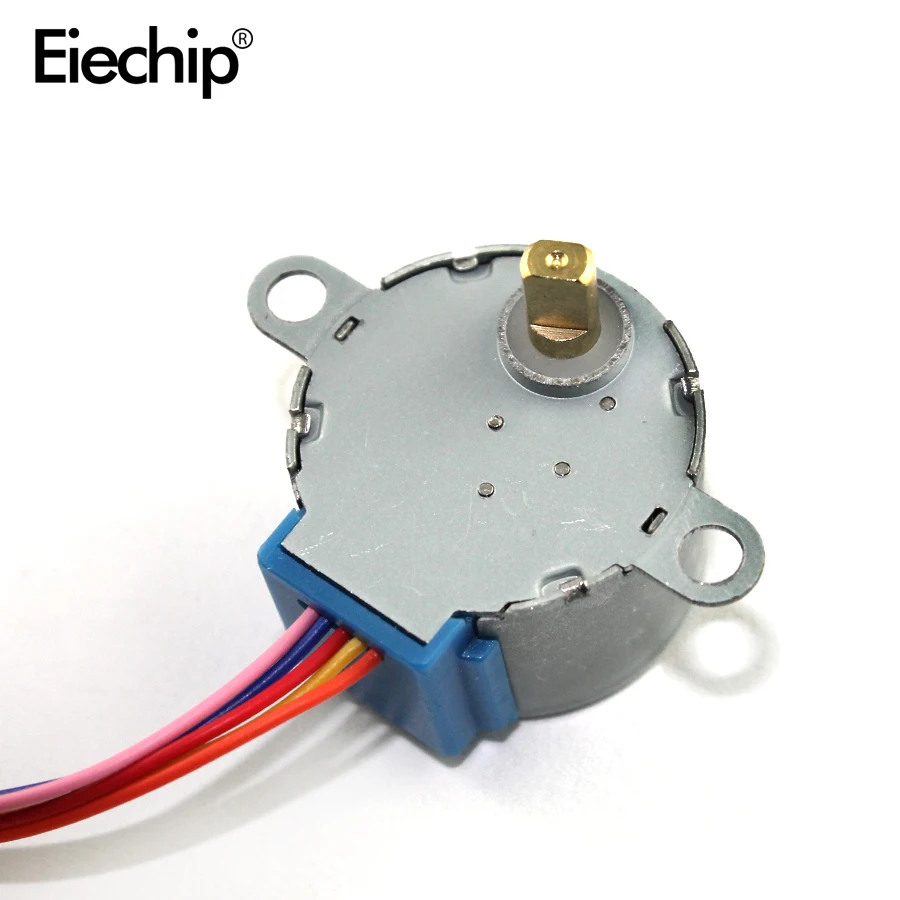 Мы рекомендуем использовать его в качестве биполярного шагового двигателя и управлять им с помощью одного из наших драйверов биполярного шагового двигателя или одного из наших контроллеров шаговых двигателей Tic. В частности, Tics упрощают управление, поскольку они поддерживают шесть различных интерфейсов (USB, последовательный TTL, I²C, RC, аналоговые напряжения и квадратурный энкодер) и настраиваются через USB с помощью нашей бесплатной утилиты конфигурации.
Мы рекомендуем использовать его в качестве биполярного шагового двигателя и управлять им с помощью одного из наших драйверов биполярного шагового двигателя или одного из наших контроллеров шаговых двигателей Tic. В частности, Tics упрощают управление, поскольку они поддерживают шесть различных интерфейсов (USB, последовательный TTL, I²C, RC, аналоговые напряжения и квадратурный энкодер) и настраиваются через USB с помощью нашей бесплатной утилиты конфигурации.
|
|
6-выводные кабели униполярного / биполярного шагового двигателя заканчиваются оголенными выводами. |
|---|

Схема подключения 6-выводного униполярного / биполярного шагового двигателя. |
|---|
Наша универсальная монтажная ступица 5 мм может использоваться для крепления объектов на выходном валу шагового двигателя диаметром 5 мм, а наш алюминиевый кронштейн NEMA 17 предлагает различные варианты установки этого шагового двигателя в вашем проекте. Аналогичный шаговый двигатель NEMA17 доступен с выходным валом стержня с резьбой, который преобразует его вращение в поступательное движение прилагаемой ходовой гайки.
Технические характеристики
- Размер: 42,3 мм квадрат × 48 мм, без вала (NEMA 17)
- Вес: 350 г (13 унций)
- Диаметр вала: 5 мм «D»
- Шагов на оборот: 200
- Номинальный ток: 1,2 А на катушку
- Номинальное напряжение: 4 В
- Сопротивление: 3,3 Ом на катушку
- Удерживающий момент: 3,2 кг-см (44 унции на дюйм)
- Индуктивность: 2,8 мГн на катушку
- Длина провода: 30 см (12 ″)
- Выходной вал на двух шарикоподшипниках
Дополнительные технические характеристики доступны в таблице данных (189 КБ pdf).
Размеры
На следующей диаграмме показаны размеры шагового двигателя в мм. Размер с надписью «длина» составляет 48 мм. Выходной D-вал имеет диаметр 5 мм с плоским сечением на 0,5 мм. Этот вал работает с нашей универсальной монтажной ступицей 5 мм.
Внутри биполярного шагового двигателя (размер SOYO NEMA 14). |
|---|
Применение шагового двигателя
Шаговые двигателиобычно используются в различных приложениях, где требуется точное управление положением, а стоимость или сложность системы управления с обратной связью неоправданна.Вот несколько приложений, где часто встречаются шаговые двигатели:
- Принтеры
- Станки с ЧПУ
- 3D-принтер / машины для создания прототипов (например, RepRap)
- Станки лазерной резки
- Машины для подбора и размещения
- Линейные приводы
- Жесткие диски
Примечание: Этот шаговый двигатель имеет номер детали SOYO SY42STh57-1206A.
Люди часто покупают этот товар вместе с:
Шаговые двигатели с высоким крутящим моментомот 0 до 0.01 до 50 Нм от JVL
Серия шаговых двигателей, которые были разработаны JVL для использования со всем диапазоном драйверов и контроллеров шаговых двигателей JVL. Это шаговые двигатели с высоким крутящим моментом, специально разработанные для мини- и микрошаговых режимов.
|
|
 Д.
Д.Размер | Нм | |||||
20 мм (0.8 дюймов) | 0,01 — 0,03 Нм | Два мини-шаговых двигателя для приложений, где малый размер необходим. | ||||
| = «http:> | 28 мм (1,1 дюйма) | 1,2–4,0 нм | Мини-шаговый двигатель для приложений, где малые габариты необходимы. | |||
43 мм (1,7 дюйма) | 0,12–0,8 нм (17,0 унций на дюйм) — (113,3 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом. | ||||
43 мм (1.7 дюймов) | 0,07–0,46 нм (9,9 унции) — (65,14 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом с высокой точностью. | ||||
57 мм (2,3 дюйма) | 0.48 Нм — 2,6 Нм (68,0 унций) — (368,2 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом. | ||||
57 мм (2,3 дюйма) | 0,32–2,1 нм (45,3 унции) — (297.4 унции на дюйм) | Серия шаговых двигателей с высоким крутящим моментом с высокой точностью. | ||||
20 — 57 мм (0,8 — 2,3) | 0,01 — 2,6 Нм (14,2 унции) — (368,2 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом с установленными энкодерами. | ||||
57 мм (2,3 — 3,2) | Серия шаговых двигателей с высоким крутящим моментом NEMA23, признанных UL. Также с энкодером и разъемами M12 | |||||
| = «http:> | 57 мм (2.3 дюйма) | 1,1–2,0 нм (155,8 унций) — (283,2 унций дюйма) | Серия шаговых двигателей с высоким крутящим моментом для мойки или тяжелых промышленных условий | |||
| = «http:> | 60 мм (2,4 дюйма) | 1.3 Нм — 3,0 Нм (184,1 унции) — (424,8 унций) | Серия шаговых двигателей с высоким крутящим моментом для мойки или тяжелых промышленных условий | |||
| = «http:> | 87 мм (3,4 дюйма) NEMA34 | 5,0–9,2 Нм (708,1 унций) — (1302.8 унций на дюйм) | Серия шаговых двигателей с высоким крутящим моментом для мойки или тяжелых промышленных условий | |||
87 мм (3,4 дюйма) | 3,2 — 12,5 Нм | Серия шаговых двигателей с высоким крутящим моментом. | ||||
87 мм (3,4 дюйма) | 3–9 нм | Серия шаговых двигателей с высоким крутящим моментом с высокой точностью. | ||||
109 мм (4.3 дюйма) | 10–24 нм | Серия шаговых двигателей с высоким крутящим моментом. | ||||
134 мм (5,1 дюйма) | 27 Нм — 50 Нм | Серия шаговых двигателей с высоким крутящим моментом. | ||||


Обратите внимание, что размеры в дюймах соответствуют стандарту Nema, размеры в миллиметрах — это фактический размер фланца.
крошечный шаговый двигатель, крошечный шаговый двигатель Поставщики и производители на Alibaba.com
Повысьте производительность своего оборудования и гаджетов при покупке. крошечный шаговый двигатель , который может похвастаться превосходной синхронизацией и превосходной отзывчивостью. Файл. крошечный шаговый двигатель , предлагаемый на Alibaba.com имеют более высокий крутящий момент и низкие вибрации, поэтому они работают плавно и эффективно на низких скоростях. Независимо от того, покупаете ли вы их для своих станков с ЧПУ, 3D-принтеров, струйных принтеров или сканеров, откройте для себя. крошечный шаговый двигатель , обеспечивающий превосходное управление скоростью и точное позиционирование.
Интернет-магазин из огромной коллекции. крошечный шаговый двигатель с полюсами статора с несколькими зубьями, роторами с постоянными магнитами, 200 зубьями ротора, углами шага поворота, динамическим и высоким статическим крутящим моментом и высокой скоростью шага.Эти. Миниатюрный шаговый двигатель отличается точностью, универсальностью, экономичностью и высокой надежностью в различных условиях. Купить. Миниатюрный шаговый двигатель с выдающейся совместимостью, номинальным крутящим моментом, стилями конструкции и размерами для различных применений.
Как ведущий интернет-магазин для. крошечный шаговый двигатель , Alibaba.com предлагает продукты, доступные с разными углами шага, размерами, конфигурациями, фазами и номинальной мощностью. Все. Крошечный шаговый двигатель , продаваемый в Интернете, имеет стабильную производительность, простоту в эксплуатации, низкий уровень отказов, высокий технический уровень и длительный срок службы, и может применяться в различных отраслях промышленности, включая принтеры, текстильные машины, медицинские инструменты, гравировальные станки, внешнее компьютерное оборудование. и больше.Эти. Крошечный шаговый двигатель выпускается в вариантах, таких как гибридные двигатели, двигатели с переменным сопротивлением и постоянные двигатели.
Магазин на Alibaba.com по разным. Миниатюрный шаговый двигатель и варианты с превосходными катушками и подшипниками для повышения точности позиционирования и максимальной удельной мощности. Различные блоки поставляются с замкнутыми и разомкнутыми системами обратной связи с разной длиной стека. Получите лучшие предложения, сравнивая товары, предлагаемые разными поставщиками.
Малый шаговый двигатель — PM25S
Главная>
Оборудование>
Шаговые двигатели
Характеристики
- Маленький Компактный
- Хорошие характеристики крутящего момента
- Угол шага: 7.5o
- Размеры: ширина 25 мм, высота 12,5 мм, монтажные отверстия 32 мм
| Резюме детали | |
|---|---|
| Производитель | — |
| Номер детали производителя | — |
| Веб-сайт производителя | — |
| Номер детали Futurlec | PM25S_STEPPER |
| отделение | Аппаратное обеспечение |
| Категория | Шаговые двигатели |
| Соответствует RoHS | — |
| Тип упаковки | — |
| Технические данные | Техническое описание PM25S |
| Заказ | |
|---|---|
| Ценовая единица | 1 |
| Кол-во в упаковке | 1 |
| Минимум для заказа | 1 |
.