асинхронный, синхронный или на постоянных магнитах?
Можно ли буксировать электромобили? Зависит от типа двигателя. Да, бывают разные. Если вы только собираетесь покупать электрокар, то знайте: до полной разрядки его лучше не доводить. И вот почему
Автомобили с двигателями внутреннего сгорания допускают буксировку. Если у вас механическая коробка передач, то это самое простое дело: ставите нейтраль в коробке передач или выжимаете сцепление – и ваш мотор оказывается физически отключен от колес, а машина превращается в обычную телегу: тяни не хочу.
С автоматами чуть сложнее, в них полного разрыва связи между колесами и мотором не предусмотрено. Но и они в режиме N позволяют буксировать машину на короткие расстояния и с невысокой скоростью.
Однако в инструкциях к электромобилям вы прочтете, что буксировка или не допускается вовсе, или, как в случае с современными моделями Tesla, допускается со скоростью не более 5 км/ч на расстояние не более 10 метров: иными словами, вы в праве только оттолкать сломанную машину на обочину.
А может ли быть иначе? Да, старые модели Tesla такое позволяли. Как и GM EV1 – легенда электрокаров 90-х годов прошлого века. Так в чем же дело? В типе электрических двигателей. Или, если уж говорить совсем правильно, электрических машин, так как в электромобилях эти устройства служат не только двигателями, но и генераторами. И на современных типах электрокаров встречается три типа таких устройств. Но для начала немного истории.
В 1821 году британский ученый Майкл Фарадей в своей статье впервые описал основные принципы преобразования электроэнергии в движение. Фарадей уже знал, что электрический ток, проходя через проволоку, создает магнитное поле. Закрученный в катушку, такой провод становится электромагнитом.
Он также знал, что противоположные полюса магнитов притягиваются, а одинаковые – отталкиваются. В электромагнитах же полярность зависит от направления движения тока, то есть ее можно быстро менять. И вот что придумал Фарадей. Берем магнит, который движется к другому. В последний момент полярность меняется, но рядом расположен третий магнит, к которому можно тянуться. Затем четвертый, пятый. Эти разнополярные магниты выстроены в линию. И если ее закольцевать, движение будет идти по кругу до тех пор, пока сквозь электромагниты идет ток и пока его направление не перестает меняться.
В последний момент полярность меняется, но рядом расположен третий магнит, к которому можно тянуться. Затем четвертый, пятый. Эти разнополярные магниты выстроены в линию. И если ее закольцевать, движение будет идти по кругу до тех пор, пока сквозь электромагниты идет ток и пока его направление не перестает меняться.
Чтобы понять, как это действует, представьте, что у вас в руках два школьных магнита в форме подковы или буквы U – помните, были такие. Если их повернуть друг к другу взаимоотталкивающимися полюсами, то они будут стремиться сделать полуоборот, чтобы снова друг к другу притянуться. А теперь представьте, что их полюса постоянно меняются местами: тогда они станут вертеться друг относительно друга. Это и есть электродвигатель.
Так впервые был описан принцип действия всех электромоторов в целом и самого древнего в частности: того, который работает от постоянного тока и использует с одной стороны постоянные магниты из намагниченного сплава, а с другой – переменные электромагниты.
Изобретения Фарадея были развиты его полседователями, в частности изобретателем электрической лампочки Томасом Эдисоном. Эдисон усовершенствовал генераторы постоянного тока и стал пионером в электрификации Нью-Йорка. В 1884 году на пороге его кабинета появился молодой сербский инженер. Звали иммигранта Никола Тесла.
Тесла предложил улучшить конструкцию Эдисона и попросил за работу 50 тысяч долларов – баснословная в те времена сумма. По легенде Эдисон согласился, но когда Тесла действительно существенно улучшил существующую модель, любимец Америки просто кинул безвестного сербского эмигранта.
Тесла рассердился и отправился к главному конкуренту, адепту переменного тока Джорджу Вестингаузу. Так началась «Война токов», окончательно проигранная постоянным током только в 2007 году, когда Нью-Йорк последним из городов перешел на ток переменный.
Генераторы Эдисона вырабатывали электричество с напряжением, близким к потребительскому: 100-200 вольт.
Однако еще в 1876 году русский ученый Павел Яблочков изобрел трансформатор, меняющий напряжение переменного тока. Подача энергии на большие расстояния перестала быть проблемой.
Но была другая проблема. Лампочкам Эдисона все равно от какого тока питаться: постоянного или переменного. А вот с электродвигателями сложнее: они в те годы требовали только постоянного. В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
Так поговорим же о них поподробнее
Если в детстве вам доводилось разбирать игрушечные электрические машинки, то вы должны помнить устройство их простейших двигателей. Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
В игрушечных машинах на статоре стоят постоянные магниты, а на роторе – электрические переменные. При вращении на них через специальные щетки подается постоянный ток от батареек, и их последовательное включение и обеспечивает движение.
Похожая конструкция встречается практически у всех электромобилей. С одним отличием: на роторе там стоят постоянные магниты, а на статоре, напротив, электрические и переменные. Так в том числе можно избавиться от щеток: одного из немногих элементов электродвигателя, который подвержен износу.
Преимущество моторов на постоянных машинах в том, что они легкие, компактные, мощные, эффективные, работают от вырабатываемого аккумуляторами постоянного тока… так, стоп! А какие недостатки?
Недостаток прост. Таким моторам не хватает тяги. Так перейдем же к асинхронным инверсионным моторам переменного тока.
Бородатый анекдот про умирающего мастера заваривать чай, который делился своим секретом словами «не жалейте заварки» – это прям притча про компанию Tesla. Вопреки расхожему мнению, ее основал не Илон Маск (он позже стал главным инвестором и владельцем), а Мартин Эберхард и его партнер Марк Тарпенинг.
Вопреки расхожему мнению, ее основал не Илон Маск (он позже стал главным инвестором и владельцем), а Мартин Эберхард и его партнер Марк Тарпенинг.
Эти двое придумали немыслимое. Создать не тихоходный, эффективный и относительно дешевый электрокар, а дорогой, быстрый и клевый. Маск же первым идею оценил и быстро прибрал ее к рукам.
Имя компании Tesla не случайно. Одной из ее технических революций стало использование асинхронного двигателя без постоянных магнитов, работающего на переменном токе – того самого, который изобрел Никола Тесла. Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Благодаря мощному асинхронному мотору электрокары Tesla с самого начала были очень динамичным, что стало ключевой причиной роста их популярности. В таком моторе переменный ток в обмотке статора создает вращающееся магнитное поле.
Итак, есть еще третий тип электрического двигателя, который встречается в современных электромобилях: синхронный на электромагнитах. Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Такие синхронные моторы на электромагнитах славятся своей способностью обеспечивать стабильность оборотов и ставятся, обычно, на всякие установки вроде насосов. А еще… на электрокар Renault Zoe. Зачем? Честно сказать, найти быстрый ответ на этот вопрос не получилось. Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Так что же лучше? Большинство автоконцернов выбирает моторы на постоянных магнитах: они эффективнее. Tesla в первые годы настаивала на асинхронных моторах. Но потом… сделала ставку на двух моторную полнопривродную схему, в которой асинхронный мотор обеспечивает динамику, а двигатель на постоянных магнитах гарантирует низкий расход энергии при небольших нагрузках. И только Renault… ну вы поняли.
А теперь о том, что ждет нас дальше. При буксировке даже обесточенный двигатель на постоянных магнитах тут же начинает работать как генератор, что чревато перегревом и возгоранием энергосистемы электромобиля. В синхронных моторах Renault оставшейся магнетизм в роторе также способен вызвать индукцию в катушках статора, ну и пошло поехало – генерация тока, перегрев, пожар.
И только асинхронные двигатели, когда их статоры не под напряжением, не являются генераторами: их можно буксировать.
Так вот, современная тенденция такова. Моторы на постоянных магнитах становятся все мощнее и тяговитее, оставаясь самыми эффективными. Производители постепенно переходят на них. Но придумать, как машины с ними безопасно буксировать инженерам еще предстоит. Пока они декларируют принцип «Наши электромобили не ломаются и в буксировке не нуждаются». Но звучит не больно убедительно.
Создание вечного двигателя на неодимовых магнитах
Создание вечного двигателя на неодимовых магнитах
Неодимовый магнит — мощный постоянный магнит, состоящий из сплава редкоземельного элемента неодима, бора и железа.
Кто из нас в детстве не пытался или хотя бы не размышлял о том, чтобы построить вечный двигатель на постоянных магнитах? Казалось бы, если магниты отталкиваются друг от друга одноименными полюсами, то, наверное, можно найти такую конфигурацию магнитов, когда отталкивание станет действовать непрерывно, и сможет, например, вращать ротор «вечного» двигателя.
Однако, стоило нам попробовать реализовать эту идею практически, как тут же выяснялось, что в реальности ротор все равно находит такое положение, в котором останавливается. Словно ротор и вращался лишь для того, чтобы в конце концов найти эту точку и остановиться в ней. То есть неизбежно наступало устойчивое равновесие ротора.
Стремление термодинамических систем к равновесию
И это вовсе не удивительно, ведь ученым давно известно, что термодинамические системы стремятся к равновесию, и в конце концов пребывают в устойчивом равновесии (статическом или динамическом).
Из механики мы знаем, что тело покоится либо движется равномерно и прямолинейно, если на него не действуют никакие внешние силы, либо если действие этих внешних сил на тело скомпенсировано, то есть суммарная сила равна нулю (результирующее внешнее воздействие отсутствует).
Как вы понимаете, принцип стремления термодинамических систем к равновесию относится и к чисто механическим системам. Так, если система изначально пребывает в устойчивом равновесии (и конструкция с постоянными неодимовыми магнитами не является исключением), то при воздействии на такую конструкцию внешнего фактора, выводящего систему из равновесия, неизбежно возникнет реакция со стороны данной системы.
Так, если система изначально пребывает в устойчивом равновесии (и конструкция с постоянными неодимовыми магнитами не является исключением), то при воздействии на такую конструкцию внешнего фактора, выводящего систему из равновесия, неизбежно возникнет реакция со стороны данной системы.
Это значит, что в системе начнут усиливаться процессы, стремящиеся уменьшить влияние внешнего фактора, который систему из равновесия вывел (Принцип Ле Шателье — Брауна).
Модель магнитного генератора индийского блогера с канала Creative Think:
Чтобы вызвать стремление к равновесию, необходимо создать условия не равновесия
Известный пример из электродинамики — правило Ленца. Если бы правило Ленца не работало, то электродвигатели не могли бы функционировать.
В электродвигателе электрический ток создает магнитное поле, которое заставляют ротор непрерывно искать равновесие, и чтобы ротор не останавливался, магнитное поле все время действует таким образом, что вынуждает ротор (даже под механической нагрузкой) постоянно догонять точку, в которой должно будет наступить равновесие.
Но при этом электрическим полем, действующим в проводниках, совершается работа, то есть расходуется энергия источника, ведь в двигателе есть как минимум трение вала о подшипники, на преодоление которого, даже если ротор не нагружен и двигатель работает вхолостую, требуется работа, то есть расход энергии.
Если бы трения (даже о воздух) не было, и вал не был бы нагружен, то ротор бы вращался очень долго, например в полном вакууме в отсутствие силы притяжения к Земле. Но тогда никакая работа этим ротором бы уже не совершалась, и это был бы уже не двигатель, а вращающийся без сопротивления кусок металла.
Вернемся теперь к постоянным магнитам. Для системы с постоянными магнитами предсказать направление протекания процесса уравновешивающей реакции несложно.
Так, еще в 90-е годы японский экспериментатор Кохеи Минато исследовал возможность создания непрерывного вращения используя постоянные магниты на роторе и статоре своего мотора. В конце концов он был вынужден также создавать изменяющееся магнитное поле, которое заставляло бы ротор искать равновесие.
Минато демонстрировал, как приближая или отдаляя постоянный магнит, можно вынудить ротор с постоянными магнитами вращаться. Но в итоге он просто дошел в экспериментах до двигателя с постоянными магнитами на роторе.
Никакого вечного двигателя не получилось. На изменение внешнего магнитного поля, от которого бы отталкивался ротор с магнитами, требуется энергия извне. То есть, для создания условий, в которых ротор с магнитами будет искать равновесие, необходимо параллельно совершать работу.
Еще одна модель магнитного генератора с Интернета:
Динамическое равновесие при низкотемпературной сверхпроводимости как частный случай
Рассмотрим крайний случай. Многие знают, что свинцовая катушка с током, помещенная в жидкий гелий, способна поддерживать ток (и магнитное поле тока) на протяжении многих лет, поскольку сопротивление проводника исчезает.
Почему сопротивление исчезает? Потому что колебания атомов в металле, обуславливающие электрическое сопротивление металла, прекращаются при критической температуре. Две такие катушки будут вести себя по отношению друг к другу как постоянные магниты. Но опять же, они найдут устойчивое равновесие и остановятся.
Две такие катушки будут вести себя по отношению друг к другу как постоянные магниты. Но опять же, они найдут устойчивое равновесие и остановятся.
Движения под действием силы не будет, то есть двигателя совершающего работу не получится. Движущиеся в сверхпроводнике электроны также работы не совершают, хотя и пребывают в устойчивом динамическом равновесии.
Чтобы двигатель совершал работу — он обязан расходовать энергию, но откуда ей взяться?
Допустим, что двигатель на постоянных магнитах реально возможен. Тогда для совершения механической работы, то есть на перемещение какого-нибудь объекта под действием силы со стороны вала такого двигателя (даже на преодоление силы трения при вращении ротора вхолостую), необходимо преобразование некой энергии внутри двигателя.
А что это за энергия, если не энергия постоянных магнитов или не энергия подводимая извне? Раз по условию задачи энергия извне не подводится, значит остается энергия постоянных магнитов.
Однако, будучи просто расположены на роторе и статоре, магниты энергию не отдадут. Чтобы заставить магнит размагничиваться, необходимо совершить работу, то есть опять же подвести к устройству энергию извне. Остается делать выводы…
Ранее ЭлектроВести писали, что французский автопроизводитель Citroen официально представил обновленный кросс-хэтчбек C4, включая его электрическую версию Citroen ë-C4. Покупатель сможет выбрать бензиновый двигатель мощностью 100-155 л.с., дизельный двигатель мощностью 110-130 л.с. или электрическую установку мощностью 100 кВт (136 л.с.).
По материалам: electrik.info.
Синхронные двигатели на постоянных магнитах
Один из довольно сложных и требующих обслуживания элементов мотора – это коллектор. Он усложняет конструкцию, а также увеличивает габариты двигателя. Поэтому, если вы хотите выбрать компактный и высокопроизводительный электродвигатель, в котором отсутствуют вращающиеся контакты – основной источник потерь в моторах на постоянных магнитах – вам стоит купить бесколлекторный электродвигатель.
Как понятно из названия, синхронные двигатели на постоянных магнитах – это двигатели постоянного тока, в чьей конструкции отсутствует коллектор, их также можно заказать под именем вентильных или, как принято в зарубежной документации, бесщеточных электродвигателей постоянного тока. Они состоят из статора с обмотками и ротора с постоянными магнитами, и их стоимость несколько выше стандартных коллекторных моторов. Это обусловлено управлением электронного регулятора. Раньше подобный блок управления был довольно дорог и не обладал необходимыми характеристиками. Однако с течением времени показатели допустимого рабочего тока и внутреннего сопротивления улучшились, а цена уменьшилась.
Чем же хорош бесколлекторный синхронный электродвигатель? Купить его стоит, если вы стремитесь выбрать мотор со сравнительно небольшими габаритами и низкой потребляемой мощностью. Преимущество таких электродвигателей кроется в отсутствии коллектора, из-за чего:
- размер двигателя становится компактнее;
- уменьшены потери на коммутацию, так как роль щеток и контактов коллектора играют электронные ключи;
- снижен порог нагревания;
- получен высокий крутящийся момент с нулевой скорости вращения;
- зафиксирован хороший перенос высокой стартовой нагрузки;
- КПД двигателей на магнитах составляет 80-95%, что гарантирует лучшее соотношение цена/качество.


Также стоит купить синхронный двигатель постоянного тока на постоянных магнитах, если вы выбираете оборудование, не создающее радиопомех. Синхронные электродвигатели такого рода используются даже в тяжелых или агрессивных условиях промышленной отрасли, в военной и оборонной сфере.
Хотите заказать двигатель постоянного тока на постоянных магнитах? Купить его в Минске можно у менеджеров ЗАО «Вольна». Достаточно оформить онлайн-заказ на сайте или позвонить по телефону + 375-17-510-95-00.
Технология встроенных магнитов в бесщеточных серводвигателях
Наше предприятие Орион-мотор специализируется на инновационных проектах в области систем электропривода, технологии и автоматизации производства (разработка и изготовление).
У нас
имеются новые технические решения по линейным и роторным синхронным моторам на
постоянных магнитах (прямой привод),
по энергосберегающим и регулируемым
асинхронным двигателям, а также по координатным
системам, электроприводам и оборудованию для различных отраслей
промышленности, в том числе для станкостроения, электроники,
металлургии и электротранспорта.
ТЕХНОЛОГИЯ ВСТРОЕННЫХ МАГНИТОВ
В БЕСЩЕТОЧНЫХ СЕРВОДВИГАТЕЛЯХ
Франк Дж. Бартос
Использование технологии встроенных магнитов в бесщеточных двигателях, по сравнению с технологией поверхностных постоянных магнитов, позволяет увеличить производительность приводов за счет возрастания плотности потока магнитного поля при сохранении высокого крутящего момента на больших скоростях вращения.
Синхронные двигатели с
постоянными магнитами (бесщеточные серводвигатели) построены на основе
намагниченного ротора, вращающегося в магнитном поле и создающего
необходимый крутящий момент. Как правило, магниты располагают на внешней
поверхности ротора, чем обеспечивается простота конструкции, хорошие
динамические характеристики во многих задачах и сравнительно низкая
стоимость. Отсюда название двигатели с поверхностными постоянными
магнитами (surface permanent magnet, SPM).
Отсюда название двигатели с поверхностными постоянными
магнитами (surface permanent magnet, SPM).
|
|
|
Существуют две модификации роторов со встроенными магнитами, которые устанавливаются в бесщеточных двигателях серии Goldline компании Danaher Motion: среднеинерционные роторы (серии M) с увеличивающим момент инерции цилиндром показаны на рисунке, и малоинерционные (серии В, на рисунке не показаны). К дополнительному оборудованию относится система водяного охлаждения, позволяющая достичь уровня мощности свыше 70 л. с. |
Для создания
бесщеточных двигателей большей мощности существует другая технология,
основанная на использовании встроенных постоянных магнитов (interior
permanent magnet, IPM). Ее также называют технологией внутренних,
утопленных или скрытых магнитов. Вне зависимости от названия идея одна
располагать магниты непосредственно внутри ротора, чтобы увеличить
скорость и крутящий момент, а также улучшить другие характеристики. В
данной статье используется название встроенные магниты.
Ее также называют технологией внутренних,
утопленных или скрытых магнитов. Вне зависимости от названия идея одна
располагать магниты непосредственно внутри ротора, чтобы увеличить
скорость и крутящий момент, а также улучшить другие характеристики. В
данной статье используется название встроенные магниты.
Форма и особенности магнитной конфигурации ротора со встроенными магнитами приводят к возникновению момента магнитного сопротивления и к увеличению плотности потока поля. Этот дополнительный момент может увеличить выходную мощность, но для этого требуется более сложный сервоусилитель и алгоритм управления. Особая форма ротора упрощает использование не имеющих датчиков систем обратной связи, если этого требует задача.
Одно из самых очевидных
преимуществ встраивания магнитов состоит в уменьшении диаметра ротора и,
как следствие, в уменьшении момента инерции. Пол Вебстер (Paul Webster),
менеджер по сервосистемам в компании GE Fanuc, обращает внимание на
высокую скорость и ускорение двигателей со встроенными редкоземельными
магнитами, например Nd-Fe-B. Технология встроенных в ротор магнитов
позволяет оптимизировать форму сердечника статора, чтобы добиться строго
синуоидального распределения магнитного поля. Благодаря встроенным
магнитам также ослабляется магнитное насыщение, возникающее из-за
реакции якоря, утверждает Вебстер.
Технология встроенных в ротор магнитов
позволяет оптимизировать форму сердечника статора, чтобы добиться строго
синуоидального распределения магнитного поля. Благодаря встроенным
магнитам также ослабляется магнитное насыщение, возникающее из-за
реакции якоря, утверждает Вебстер.
Еще одно преимущество технологии встроенных магнитов механически прочный, хорошо сбалансированный ротор. По словам Вебстера, встроенные магниты не могут сломаться или отлететь, поэтому не стоит опасаться повреждений ротора и/или подшипников при высоких скоростях вращения. Действительно, среднее время безотказной работы двигателей последней линейки GE Fanuc Alpha достигло впечатляющего значения в 1,4 миллиона часов, утверждает он.
|
|
|
Такие конструкции, уменьшающие момент от помех
поля в момент трогания и улучшающие плавность подачи, компания
GE Fanuc реализует в своих серводвигателях для станков с ЧПУ. |
 Ассиметричное периферийное расположение открытых ферритовых
магнитов (А) используется, когда для стабильной работы
необходима значительная инерционность. В более компактной
конструкции со сборным ротором (В) применяются редкоземельные
магниты, благодаря чему достигается высокая скорость и ускорение
Ассиметричное периферийное расположение открытых ферритовых
магнитов (А) используется, когда для стабильной работы
необходима значительная инерционность. В более компактной
конструкции со сборным ротором (В) применяются редкоземельные
магниты, благодаря чему достигается высокая скорость и ускорение
По словам Вебстера, крутящий момент, вызванный помехами поля в момент трогания, составляет в IPM двигателях всего 0,05% от номинального момента, что значительно лучше, чем при использовании технологии поверхностных магнитов. В основном, эти двигатели используются в станках с ЧПУ, где требуется высокая точность и высокая скорость подачи. Высокая точность станка обеспечивается, благодаря низкому уровню момента, вызванного помехами в момент трогания.
Ли Стивенс (Lee Stephens),
системный инженер в компании Danaher Motion, отмечает, что практически
все бесщеточные серводвигатели построены на базе вращающихся постоянных
магнитов, расположенных либо на поверхности ротора, либо внутри него.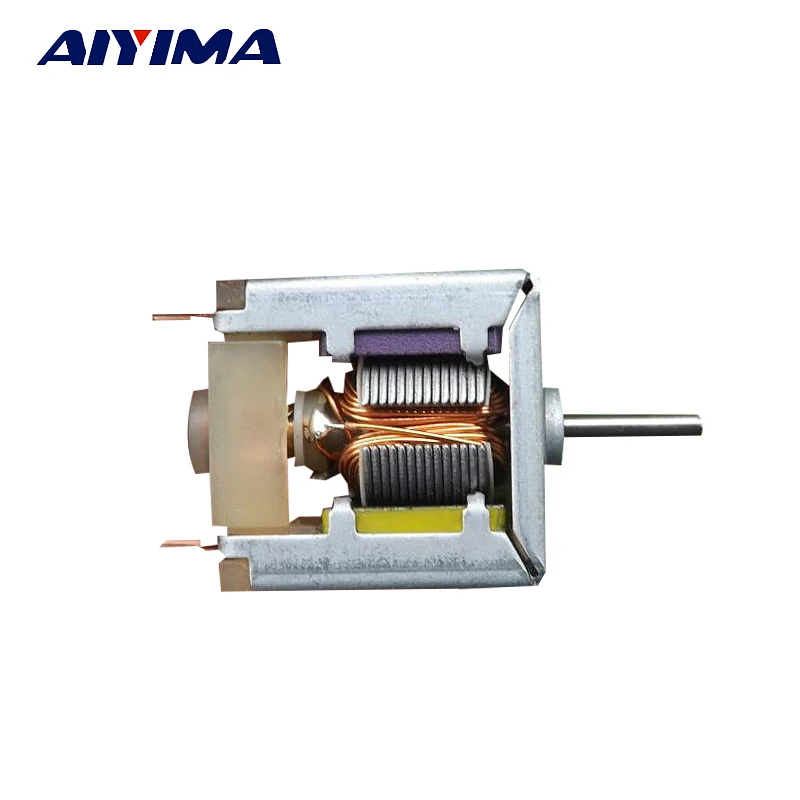 Встроенные магниты создают поле с подходящей двигателям высокой
мощности геометрией, считает Стивенс.
Встроенные магниты создают поле с подходящей двигателям высокой
мощности геометрией, считает Стивенс.
По словам Стивенса, технология поверхностных магнитов упрощает конструкцию. Заранее заготовленные магниты, предназначенные для создания поля в двигателе, просто приклеиваются к сердечнику ротора. Технология SPM экономична, особенно в маломощных системах, подобных модели NEMA 34 или более компактным двигателям. Технология встроенных постоянных магнитов предлагает сделать магниты частью структуры ротора. IPM это когда магниты и ротор являются одним целым, отмечает Стивенс. В то же время мощность и плотность потока магнитного поля взаимосвязаны.
Размещенные на поверхности
магниты могут создавать быстро меняющееся магнитное поле, благодаря чему
достигается высокая скорость вращения, а встроенные магниты создают
большую плотность потока и, соответственно, больший крутящий момент, но
с некоторой потерей скорости изменения поля, утверждает Стивенс.
Установление магнитного поля происходит за конечное время, что не мешает созданию высокоскоростных двигателей со встроенными постоянными магнитами. Обычно эта технология используется в больших двигателях, однако размеры и мощности двигателей IPM и SPM в значительной области совпадают.
Редкоземельные магниты, наверное, являются самой дорогой частью двигателя. Технология SPM обычно требует меньше магнитного материала, особенно для небольших двигателей, что является ее преимуществом. Благодаря простой конструкции и малому использованию материала, SPM гораздо более экономична, считает Стивенс, но всегда нужно искать компромисс между стоимостью и преимуществами технологии. Например, в IPM-двигателях установлены плоские магниты, которые просты в изготовлении, в отличие от магнитов криволинейных форм в SPM двигателях.
|
|
|
Двигатель серии Sigma II Series Large Capacity SGMBH компании Yaskawa Electric с полностью закрытыми встроенными магнитами, воздушным охлаждением корпуса (TEFC), защитным кожухом IP44 и входным напряжением 480 В |
Стивенс
соглашается с преимуществами установки магнитов внутри ротора. Чем
меньше диаметр ротора, тем меньше инерция. Момент инерции пропорционален
квадрату радиуса, что следует из формулы момента инерции цилиндрического
ротора mr2/2, где m масса ротора, а r его радиус. Это приводит к
эффективному увеличению мощности одной из характеристик двигателя,
особенно важной для больших двигателей, утверждает он. В мощных
SPM-двигателях момент инерции ротора может оказаться слишком большим,
что приведет к значительным затратам энергии только на разгон двигателя.
Чем
меньше диаметр ротора, тем меньше инерция. Момент инерции пропорционален
квадрату радиуса, что следует из формулы момента инерции цилиндрического
ротора mr2/2, где m масса ротора, а r его радиус. Это приводит к
эффективному увеличению мощности одной из характеристик двигателя,
особенно важной для больших двигателей, утверждает он. В мощных
SPM-двигателях момент инерции ротора может оказаться слишком большим,
что приведет к значительным затратам энергии только на разгон двигателя.
Ослабление поля, новая конструкция двигателя
По словам Стеффена Винклера (Steffen
Winkler), главного менеджера по приводным системам компании Bosch
Rexroth AG, одним из основных преимуществ синхронных двигателей со
встроенными постоянными магнитами является возможность управляемого
ослабления поля (до значения 6:1 или даже 10:1). Данный метод позволяет
расширить область рабочих скоростей до значений, характерных для
асинхронных двигателей.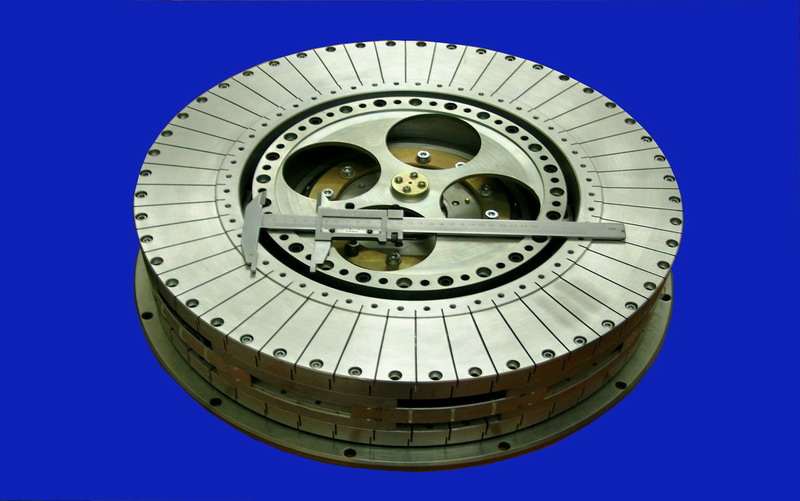
Компания Bosch Rexroth, известная своими технологическими решениями в области электродвигателей, представила новейший синхронный двигатель со встроенными постоянными магнитами с прямым приводом. По имеющимся данным, модель IndraDyn H обеспечивает наивысшую, по сравнению с другими решениями, мощность, равную 57 кВт. Максимальная скорость более компактной модели равна 30000 оборотов в минуту. Винклер называет IndraDyn H первым двигателем с полностью замкнутым контуром охлаждения, упрощающим работу инженерам-механикам и увеличивающим эффективность охлаждения. По его словам, встроенное в статор водяное охлаждение наиболее эффективно и считается стандартом, но и другие охлаждающие среды (масло, газ), а также естественная конвекция могут быть использованы в задачах с пониженной или непродолжительной нагрузкой.
Компания Yaskawa Electric
применяет технологию IPM в мощных серводвигателях, например, в модели
Large Capacity SGMBH, заявленной как стандартный двигатель с выходной
мощностью до 55 кВт. Крис Нудсен (Chris Knudsen), менеджер по маркетингу
продукции в компании Yaskawa Electric America, отмечает, что эти
двигатели могут обеспечить мощность до 90 кВт. Благодаря более
компактному и легкому ротору двигателя SGMBH, центробежные силы
уменьшаются и, как следствие, увеличиваются скорость и ускорение,
необходимые в таких задачах, как высокотемпературное формообразование,
литье под давлением, прессование, обработка металлов под давлением,
продувка материалов в конвертере, автоматизированная сборка и т.д.
Быстрое вращение ротора с большим диаметром приводит к возникновению
значительных центробежных сил, действующих на расположенные на
поверхности ротора магниты, утверждает Нудсен, эти силы, как и
магнитные силы, вызванные током, можно уменьшить, если установить
магниты внутри ротора.
Крис Нудсен (Chris Knudsen), менеджер по маркетингу
продукции в компании Yaskawa Electric America, отмечает, что эти
двигатели могут обеспечить мощность до 90 кВт. Благодаря более
компактному и легкому ротору двигателя SGMBH, центробежные силы
уменьшаются и, как следствие, увеличиваются скорость и ускорение,
необходимые в таких задачах, как высокотемпературное формообразование,
литье под давлением, прессование, обработка металлов под давлением,
продувка материалов в конвертере, автоматизированная сборка и т.д.
Быстрое вращение ротора с большим диаметром приводит к возникновению
значительных центробежных сил, действующих на расположенные на
поверхности ротора магниты, утверждает Нудсен, эти силы, как и
магнитные силы, вызванные током, можно уменьшить, если установить
магниты внутри ротора.
Нудсен считает, что, учитывая
затраты и требования задачи, технология встроенных постоянных магнитов
подходит для крупногабаритных двигателей.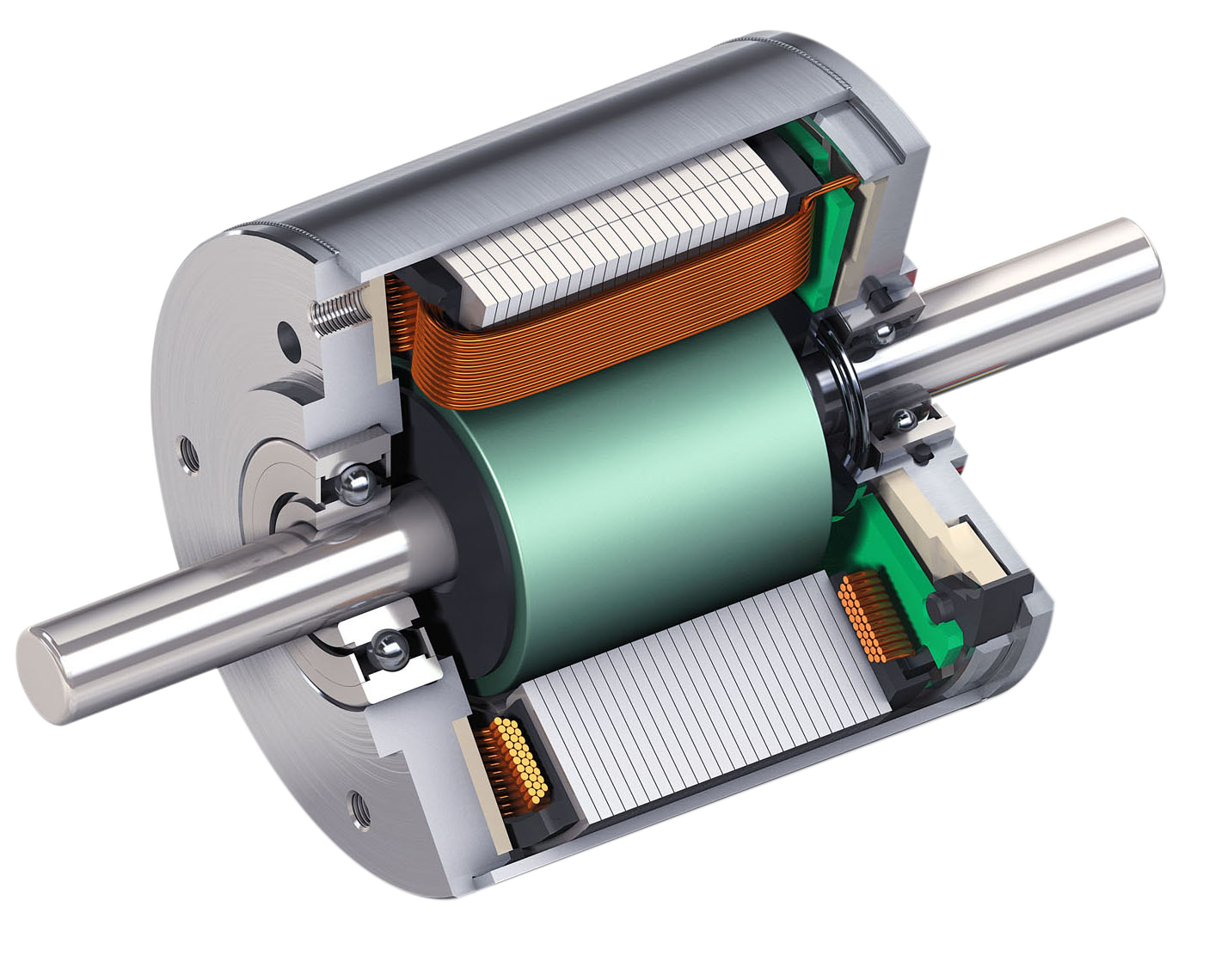 Для меньших по размеру
серводвигателей подходит экономичная и надежная технология SPM,
обеспечивающая отличные характеристики двигателя в приложениях с
высокими требованиями, например, в механических станках.
Для меньших по размеру
серводвигателей подходит экономичная и надежная технология SPM,
обеспечивающая отличные характеристики двигателя в приложениях с
высокими требованиями, например, в механических станках.
Стоимость, сложность, управление
Создание серводвигателя со встроенными постоянными магнитами сопряжено с рядом сложностей и дополнительных затрат. Вебстер из GE Fanuc уточняет: чтобы реализовать преимущества в производительности и размере, необходимо использовать метод конечных элементов (FEM) магнитного анализа, дорогие редкоземельные магниты и датчики положения с высоким разрешением.
Одна из основных
конструкторских проблем заключается в придании правильной формы
сердечнику IPM-ротора. Внутреннее расположение магнитов и меньший размер
ротора ограничивают возможности по изменению формы поверхности
сердечника. Чтобы получить оптимальное соотношение между величиной
крутящего момента и силой, возникающей вследствие зубцовых гармонических
помех, для определения формы сердечника ротора применяют метод конечных
элементов анализа магнитной структуры. Технология IPM создает нечто
среднее между сверхплавным и сверхмощным двигателем, продолжает
Вебстер. Для создания формы нужной сложности необходимо современное
литейное оборудование. Еще более сложен в изготовлении слоистый ротор,
используемый для уменьшения тепловых потерь. А для реализации
технологии SPM можно ограничиться сплошным стальным ротором с
наклеенными на него обыкновенными магнитами, продолжает Вебстер.
Чтобы получить оптимальное соотношение между величиной
крутящего момента и силой, возникающей вследствие зубцовых гармонических
помех, для определения формы сердечника ротора применяют метод конечных
элементов анализа магнитной структуры. Технология IPM создает нечто
среднее между сверхплавным и сверхмощным двигателем, продолжает
Вебстер. Для создания формы нужной сложности необходимо современное
литейное оборудование. Еще более сложен в изготовлении слоистый ротор,
используемый для уменьшения тепловых потерь. А для реализации
технологии SPM можно ограничиться сплошным стальным ротором с
наклеенными на него обыкновенными магнитами, продолжает Вебстер.
По словам Вебстера,
IPM-двигателю, как правило, нужна более быстрая и современная система
управления. Для стабильной работы малоинерционного двигателя с небольшим
и легким ротором требуется датчик положения высокого разрешения,
установленный на двигатель, а также быстрая следящая система управления. Для увеличения количества данных обратной связи, необходимых для работы
цикла скорости и позиционирования, могут понадобиться датчики с
поддержкой до 16 миллионов отсчетов на оборот. Для стабильной работы
необходимо принимать во внимание инерцию ротора, поскольку момент
инерции IPM-ротора на основе редкоземельных магнитов может оказаться в
несколько раз меньше момента SPM-ротора.
Для увеличения количества данных обратной связи, необходимых для работы
цикла скорости и позиционирования, могут понадобиться датчики с
поддержкой до 16 миллионов отсчетов на оборот. Для стабильной работы
необходимо принимать во внимание инерцию ротора, поскольку момент
инерции IPM-ротора на основе редкоземельных магнитов может оказаться в
несколько раз меньше момента SPM-ротора.
Время отклика следящей системы
управления также должно быть малым для улучшения стабильности и
плавности подачи при больших значениях инерционности. Вебстер
рекомендует быстродействующее векторное управление (HRV) особый тип
низкоуровневого управления, поддерживающий период цикла управления током
32,25 микросекунд (период цикла скорости 62,5 мкс) и обеспечивающий
улучшенную реакцию, управляемость, точность и плавность работы. Кроме
того, в системах векторного управления используются резонансные фильтры,
которые ослабляют механический резонанс в двигателе. Совместное
использование этих особенностей систем управления обеспечит высокую
эффективность работы, утверждает Вебстер.
Совместное
использование этих особенностей систем управления обеспечит высокую
эффективность работы, утверждает Вебстер.
Винклер из Bosch Rexroth согласен с тем, что двигателям со встроенными постоянными магнитами требуется более сложное управление, чем традиционным двигателям с постоянными магнитами. Чтобы обеспечить оптимальную производительность системы, необходимо провести ее настройку с учетом специфических характеристик двигателя, особенно это касается управления ослаблением поля, считает он. Это значит, что желательно, хотя и не обязательно, использовать двигатель и контроллер одного производителя
По словам Стивенса из Danaher
Motion, из-за отличительных особенностей технологии встроенных
постоянных магнитов сигнал управления IPM-двигателем намного сложнее
синусоидального. Более того, некоторым двигателям со встроенными
магнитами высокой мощности требуются дополнительные функции управления,
необходимые для увеличения рабочей скорости без уменьшения крутящего
момента или с небольшим его уменьшением. Данный метод, известный под
названием угловое опережение, основан на переключении управляющего
сигнала с опережением изменения положения ротора и чем-то напоминает
опережение в распределителе зажигания автомобиля. С помощью этого метода
преодолевается временная задержка установления поля, возникающая из-за
индуктивности, магнитного сопротивления и формы сердечника и зубцов.
Необходимо полностью использовать магнитное поле, чтобы получить
максимальный крутящий момент при данной скорости, считает Стивенс,
при современном уровне развития цифровых сигнальных процессоров эта
задача легко решается с помощью таблиц преобразования или расчетов на
уровне привода
Данный метод, известный под
названием угловое опережение, основан на переключении управляющего
сигнала с опережением изменения положения ротора и чем-то напоминает
опережение в распределителе зажигания автомобиля. С помощью этого метода
преодолевается временная задержка установления поля, возникающая из-за
индуктивности, магнитного сопротивления и формы сердечника и зубцов.
Необходимо полностью использовать магнитное поле, чтобы получить
максимальный крутящий момент при данной скорости, считает Стивенс,
при современном уровне развития цифровых сигнальных процессоров эта
задача легко решается с помощью таблиц преобразования или расчетов на
уровне привода
Динамические характеристики
двигателей со встроенными постоянными магнитами достигаются при помощи
сложных алгоритмов углового опережения, ненужных SPM-двигателям. Это
одна из причин, почему системы управления IPM-серводвигателей обычно
сложнее. Тем не менее, Стивенс отмечает, что более сложная система
управления не означает менее стабильную работу. Требования к надежности
в промышленности постоянно растут, и им соответствуют приводы, которые
во многом превосходят устаревшие аналоги, заканчивает Стивенс.
Тем не менее, Стивенс отмечает, что более сложная система
управления не означает менее стабильную работу. Требования к надежности
в промышленности постоянно растут, и им соответствуют приводы, которые
во многом превосходят устаревшие аналоги, заканчивает Стивенс.
В общем и целом, двигатели со встроенными постоянными магнитами могут предоставить лучшие характеристики, чем их аналоги на базе роторов с поверхностными магнитами и электродвигатели, основанные на других технологиях.
( control engineering usa )
Синхронные двигатели DR…J | SEW-EURODRIVE
Вы ищете двигатель с самым высоким уровнем энергоэффективности и компактной конструкцией? В этом случае Вас могут заинтересовать двигатели серии DR…J с технологией LSPM: один двигатель охватывает три класса эффективности. IE2, IE3 и IE4.
Синхронные двигатели DR.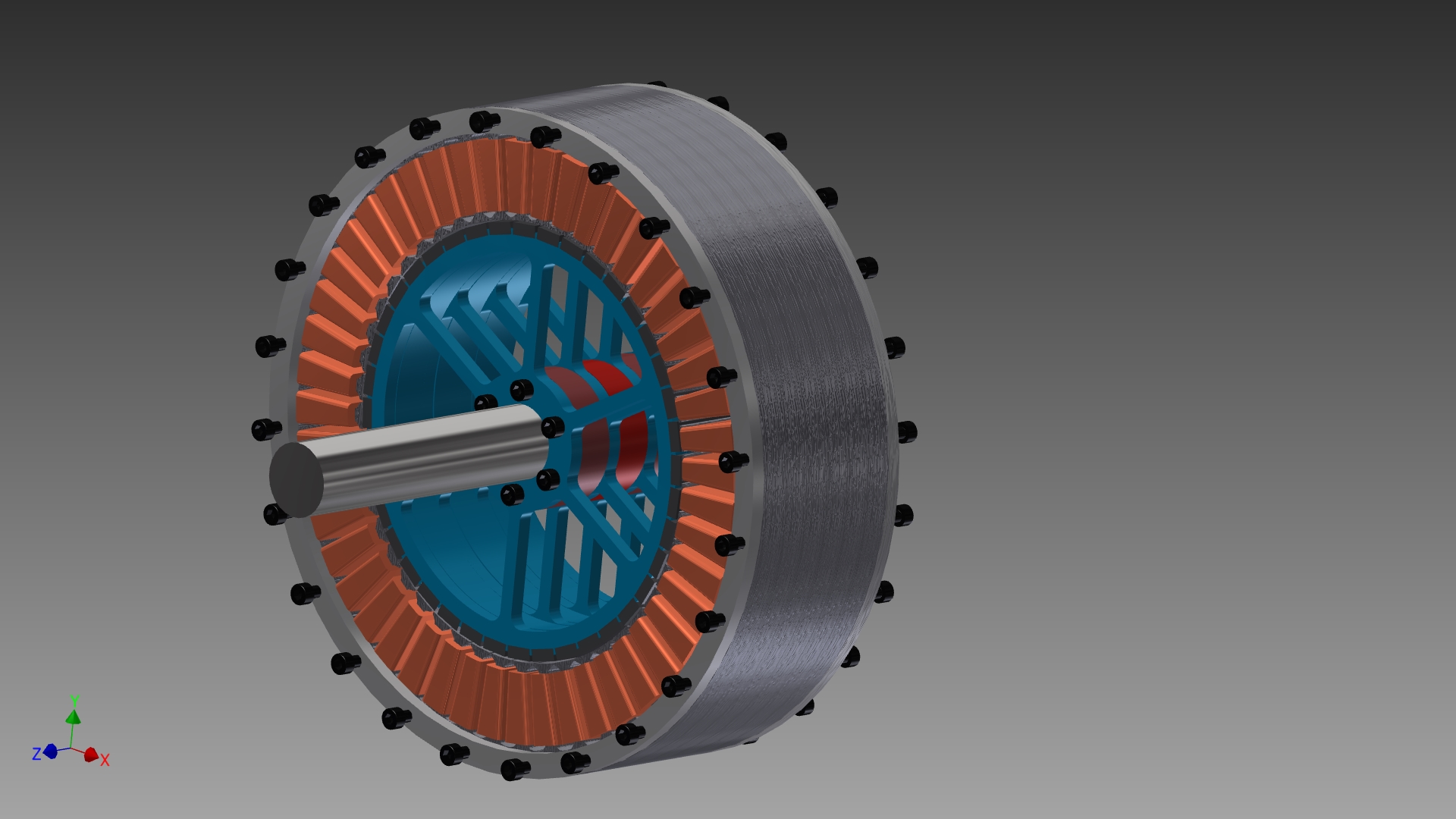 ..J (технология LSPM)
Синхронные двигатели DR…J (технология LSPM)
..J (технология LSPM)
Синхронные двигатели DR…J (технология LSPM)
Линейный стартовый двигатель с постоянным магнитом (двигатель LSPM) представляет собой асинхронный двигатель переменного тока с дополнительными постоянными магнитами в роторе с «беличьей клеткой». После асинхронного пуска двигатель синхронизируется с рабочей частотой и работает в синхронном режиме. Технология двигателя, открывающая новые, гибкие возможности применения приводной техники.
Cинхронные двигатели в процессе работы не показывают каких-либо потерь в роторе.Они демонстрируют впечатляющую степень эффективности, сохраняя при этом очень компактную конструкцию. В том же классе продуктивности двигатель DR..J с технологией LSPM на два типоразмера меньше стандартного двигателя с той же номинальной мощностью.
Пример для сравнения:
Стандартный двигатель DRE.. с номинальной мощностью 1,1 кВт и размером 90 M соответствует требованиям класса энергоэффективности IE2.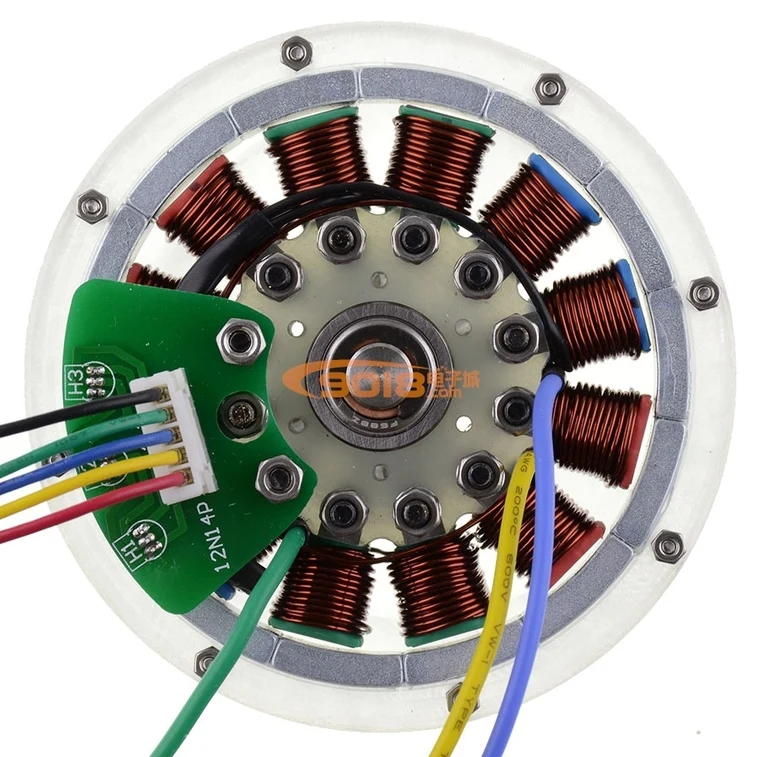 В то же время, благодаря технологии LAMP Вы теперь используете «только» один DRE..J меньшего размера 80S для IE2. Эффективно и выгодно!
В то же время, благодаря технологии LAMP Вы теперь используете «только» один DRE..J меньшего размера 80S для IE2. Эффективно и выгодно!
В двигателях DR…J (технология LSPM ) нам, как производителям двигателей, удалось объединить преимущества прочного и надежного асинхронного двигателя с преимуществами компактного синхронного с малыми потерями двигателя. Для более высокой эффективности при использовании в Ваших условиях.
Задача решена только наполовину, если нет редуктора? В этом случае используйте нашу модульную систему и комбинируйте двигатель LSPM с цилиндрическим, червячным, коническим, SPIROPLAN® редуктором или редуктором с параллельными валами на Ваш выбор. Все эти типы редукторов уже имеются в продаже, комбинированные с двигателями DR … J двигатели в виде мотор-редукторов.
И конечно же, мы предлагаем подходящие Инверторные технологии для контроллера и контроль. Мы сами разрабатываем и производим приводную электронику, поэтому она прекрасно подходит к нашим двигателям и мотор-редукторам, а также к Вашим условиям.
|
The Basic working:
Thus the brushed D.C motor should never be used for operations that demand long life and reliability. Fort this reason and the other reasons listed in the introduction, BLDC motors are used in most of the modern devices. Efficiency of a BLDC motor is typically around 85-90%, whereas the conventional brushed motors are only 75-80% efficient. BLDC motors are also suitable for high speed applications ( 10000 rpm or above). The BLDC motors are also well known for their better speed control.
Rotor – is moving engine part which has permanent magnets. Stator – more complex engine part which has few electromagnets groups.
Further improving the BLDC Performance
Use of an ECU (Electronic controller unit)
That’s how a BLDC works. But, you might have some intriguing doubts in your mind. How do I know which stator coils to energize? How do I know when to energize it, so that I will get a continuous rotation from the rotor? In a BLDC we use an electronic controller unit (ECU) for this purpose. A sensor determines the position of the rotor, and based on this information the controller decides, which coils to energize.
The schematic figure above shows, how the ECU controls task of energizing the coil.
This is base information to show how BLDC motor works. This type of engine is tool and in order to have advantage from this tool you have to know basics how it works. All this information is only tip of the iceberg, however you can work with Miromax and we help you to achieve success in your project. Information used from – www.learnengineering.org |

 You can notice that, at any instant only one coil is energized. The 2 dead coils greatly reduce the power output of the motor. Here is the trick to overcome this problem. When the rotor is in this position, along with the first coil, which pulls the rotor, you can energize the coil behind it such a way that, it will push the rotor.
You can notice that, at any instant only one coil is energized. The 2 dead coils greatly reduce the power output of the motor. Here is the trick to overcome this problem. When the rotor is in this position, along with the first coil, which pulls the rotor, you can energize the coil behind it such a way that, it will push the rotor. Just connect one free end of the coils together.
Just connect one free end of the coils together. This task is known as commutation. Most often, a Hall-effect sensor is used for this purpose. The Hall-effect sensor is fitted on the back of the motor as shown in the picture below.
This task is known as commutation. Most often, a Hall-effect sensor is used for this purpose. The Hall-effect sensor is fitted on the back of the motor as shown in the picture below.миф или реальность, устройство, виды
Идея разработки вечного бестопливного двигателя не нова, за разработку такого агрегата во все времена брались именитые ученые своего времени. Однако ни технических средств для реализации задумки, не возможностей того времени не хватало. В некоторых случаях дело доходило только до теоретического обоснования, но существуют примеры реально разработанных альтернативных двигателей, которые призваны создать конкуренцию классическим электрическим машинам. Одним из таких вариантов является магнитный двигатель.
Одним из таких вариантов является магнитный двигатель.
Миф или реальность?
Вечный двигатель знаком практически каждому еще со школьной скамьи, только на уроках физики четко утверждалось, что добиться практической реализации невозможно из-за сил трения в движущихся элементах. Среди современных разработок магнитных моторов представлены самоподдерживающие модели, в которых магнитный поток самостоятельно создает вращательное усилие и продолжает себя поддерживать в течении всего процесса работы. Но основным камнем преткновения является КПД любого двигателя, включая магнитный, так как он никогда не достигает 100%. Со временем мотор все равно остановится.
Поэтому все практические модели требуют повторного вмешательства через определенное время или каких-либо сторонних элементов, работающих от независимого источника питания. Наиболее вероятным вариантом бестопливных двигателей и генераторов выступает магнитная машина. В которой основной движущей силой будет магнитное взаимодействие между постоянными магнитами, электромагнитными полями или ферромагнитными материалами.
Актуальным примером реализации являются декоративные украшения, выполненные в виде постоянно двигающихся шаров, рамочек или других конструкций. Но для их работы необходимо использовать батарейки, которые питают постоянным током электромагниты. Поэтому далее рассмотрим тот принцип действия, который подает самые обнадеживающие ожидания.
Устройство и принцип работы
Сегодня существует достаточно большое количество магнитных двигателей, некоторые из них схожи, другие имеют принципиально отличительную конструкцию.
Для примера мы рассмотрим наиболее наглядный вариант:
Принцип действия магнитного двигателяКак видите на рисунке, мотор состоит из следующих компонентов:
- Магнит статора здесь только один и расположен он на пружинном маятнике, но
такое размещение требуется только в экспериментальных целях. Если вес ротора
окажется достаточным, то инерции движения хватит для преодоления самого малого
расстояния между магнитами и статор может иметь стационарный магнит без
маятника.
- Ротор дискового типа из немагнитного материала.
- Постоянные магниты, установленные на роторе в форме улитки в одинаковое положение.
- Балласт — любой увесистый предмет, который даст нужную инерционность (в рабочих моделях эту функцию может выполнять нагрузка).

Все, что нужно для работы такого агрегата — это придвинуть магнит статора на достаточное расстояние к ротору в точке самого наибольшего удаления, как показано на рисунке. После этого магниты начнут притягиваться по мере приближения формы улитки по кругу, и начнется вращение ротора. Чем меньше размер магнитов и чем более плавная форма получится, тем легче произойдет движение. В месте максимального сближения на диске установлена «собачка», которая сместит маятник от нормального положения, чтобы магниты не притянулись в статическое положение.
Разновидности магнитных двигателей и их схемы
Сегодня существует много моделей бестопливных генераторов, электрических машин и моторов, чей принцип действия основан на природных свойствах постоянных магнитов. Некоторые варианты были спроектированы именитыми ученными, достижения которых стали основополагающим камнем в фундаменте науки. Поэтому далее мы рассмотрим самые популярные из них.
Некоторые варианты были спроектированы именитыми ученными, достижения которых стали основополагающим камнем в фундаменте науки. Поэтому далее мы рассмотрим самые популярные из них.
Николы Тесла
В данном примере мы рассмотрим одну из разработок известного ученого, конструкция которой приведена на рисунке ниже:
Магнитный двигатель ТеслаКонструктивно магнитный двигатель Тесла состоит из таких элементов:
- электрического генератора, который представлен двумя дисками из проводника, помещенными в униполярной магнитной среде;
- гибкого ремня, изготовленного из проводящего материала, расположенного по периферии дисков;
- независимых магнитов, сохраняющих униполярность полей при вращении дисков.
Такой двигатель, по словам изобретателя, может функционировать и в качестве генератора, вырабатывая электрическую энергию при вращении дисков.
Минато
Этот пример нельзя назвать самовращающимся двигателем, так как для его работы требуется постоянная подпитка электрической энергией. Но такой электромагнитный мотор позволяет получать значительную выгоду, затрачивая минимум электричества для выполнения физической работы.
Но такой электромагнитный мотор позволяет получать значительную выгоду, затрачивая минимум электричества для выполнения физической работы.
Как видите на схеме, особенностью этого вида является необычный подход к расположению магнитов на роторе. Для взаимодействия с ним на статоре возникают магнитные импульсы за счет кратковременной подачи электроэнергии через реле или полупроводниковый прибор.
При этом ротор будет вращаться, пока его элементы не размагнитятся. Сегодня все еще ведутся разработки по улучшению и повышению эффективности устройства, поэтому назвать его полностью завершенным нельзя.
Николая Лазарева
Это не только простейший гравитационный двигатель, но и одна из реально работающих моделей вечного двигателя. Пример приведен на рисунке ниже:
Двигатель ЛазареваКак видите, для изготовления такого двигателя или генератора вам потребуется:
- колба;
- жидкость;
- трубка;
- прокладка из пористого материала;
- крыльчатка и нагрузка на вал.
Принцип действия заключается в том, что вода по тонкой трубке из-за избытка давления будет подниматься вверх и скапывать на прокладку и вращать крыльчатку. Далее вода будет просачиваться сквозь губку и под воздействием магнитного поля Земли дальше стекать в нижний резервуар. Цикл будет повторяться до тех пор, пока жидкость не исчезнет, что в идеально герметичном контуре не произойдет никогда. Для усиления момента на вращаемый вал добавляют магнитные усилители.
Говарда Джонсона
В своих исследованиях Джонсон руководствовался теорией потока непарных электронов, действующих в любом магните. В его двигателе обмотки статора формируются из магнитных дорожек. На практике эти агрегаты получили реализацию в конструкции роторного и линейного двигателя. Пример такого устройства приведен на рисунке ниже:
Двигатель ДжонсонаКак видите, на оси вращения в двигателе устанавливаются сразу и статор и ротор, поэтому классически вал вращаться здесь не будет. На статоре магниты повернуты одноименным полюсом к роторным, поэтому они взаимодействуют на силах отталкивания. Особенность работы ученого заключалась в длительном вычислении расстояний и зазоров между основными элементами мотора.
Особенность работы ученого заключалась в длительном вычислении расстояний и зазоров между основными элементами мотора.
Перендева
Данный вид двигателя, как и предыдущий, представляет собой еще одну модель магнитного взаимодействия между статором и ротором, где обе части содержат постоянные магниты. Схема конструкции обоих представляет собой диск или кольцо, в котором точечно устанавливаются вектолиты.
Магниты статора и ротора в двигателе ПередневаКак видите на рисунке, положение активных элементов имеет угол смещения, который и определяет эффективность вращения машины. Взаимодействие магнитных потоков в двигателе происходит при задании начального крутящего момента. Точность положения и угла наклона можно отстроить только в лабораторных или заводских условиях.
Василия Шкондина
Получить вечный генератор Василию Шкодину не удалось, КПД такого магнитного двигателя и сегодня не превышает 83%. Но и этого более чем достаточно, чтобы его повсеместно применяли для велосипедов, байков и самокатов. Он может эксплуатироваться как в режиме тяги, так и для рекуперации электроэнергии.
Он может эксплуатироваться как в режиме тяги, так и для рекуперации электроэнергии.
На рисунке приведена конструкция магнитного двигателя Шкодина. Как видите, и ротор и статор представляют собой кольца. Из магнитных деталей он содержит 11 пар неодимовых магнитов. Ротор устройства содержит 6 электромагнитов, смещенных на одинаковое расстояние друг относительно друга.
Свинтицкого
Еще в конце 90-х украинский конструктор предложит модель самовращающегося магнитного двигателя, который стал настоящим прорывом в технике. За основу им был взят асинхронный двигатель Ванкеля, которому не удалось решить проблему с преодолением 360° оборота.
Игорь Свинтицкий эту проблему решил и получил патент, обратился в ряд компаний, однако асинхронное магнитное чудо техники никого не заинтересовало, поэтому проект был закрыт и за его масштабное тестирование ни одна компания не взялась.
Джона Серла
От электрического мотора такой магнитный двигатель отличает взаимодействие исключительно магнитного поля статора и ротора. Но последний выполняется наборными цилиндрами с таблетками из специального сплава, которые создают магнитные силовые линии в противоположном направлении. Его можно считать синхронным двигателем, так как разница частот в нем отсутствует.
Но последний выполняется наборными цилиндрами с таблетками из специального сплава, которые создают магнитные силовые линии в противоположном направлении. Его можно считать синхронным двигателем, так как разница частот в нем отсутствует.
Полюса постоянных магнитов расположены так, что один толкает следующий и т.д. Начинается цепная реакция, приводящая в движение всю систему магнитного двигателя, до тех пор, пока магнитной силы будет хватать хотя бы для одного цилиндра.
Алексеенко
Интересный вариант магнитного двигателя представил ученый Алексеенко, который создал устройство с роторными магнитами необычной формы.
Двигатель АлексеенкоКак видите на рисунке, магниты имеют необычную изогнутую форму, которая максимально сближает противоположные полюса. Что делает магнитные потоки в месте сближения значительно сильнее. При начале вращения отталкивание полюсов получается значительно большим, что и должно обеспечить непрерывное движение по кругу.
Видео в помощь
Control Engineering | Понимание двигателей с постоянными магнитами
Автор: Кристофер Ящолт, Yaskawa America Inc. 31 января 2017 г.
Управление скоростью двигателей переменного тока в большинстве случаев осуществляется с помощью частотно-регулируемого привода (VFD). Хотя во многих сценариях используются частотно-регулируемые приводы с асинхронными двигателями с обмотками статора для создания вращающегося магнитного поля, они также могут обеспечить точное управление скоростью, используя датчики обратной связи по скорости или положению в качестве ссылки на частотно-регулируемый привод.
Хотя во многих сценариях используются частотно-регулируемые приводы с асинхронными двигателями с обмотками статора для создания вращающегося магнитного поля, они также могут обеспечить точное управление скоростью, используя датчики обратной связи по скорости или положению в качестве ссылки на частотно-регулируемый привод.
В некоторых ситуациях можно получить сравнительно точное регулирование скорости без использования датчиков обратной связи. Это стало возможным благодаря использованию двигателя с постоянными магнитами (PM) и процесса, называемого «методом ввода высокочастотного сигнала».
Индукционные машины
Асинхронная машина переменного тока (IM) также обычно называется двигателем переменного тока. Вращающееся поле создается обмоткой статора. Вращающееся поле индуцирует ток в стержнях ротора.Генерация тока требует разницы скоростей между ротором и магнитным полем. Взаимодействие между полем и током создает движущую силу. Таким образом, индукционные машины переменного тока являются преобладающими двигателями, управляемыми приводами с регулируемой скоростью.
Двигатели с постоянными магнитами
Двигатель с постоянными магнитами — это двигатель переменного тока, в котором используются магниты, встроенные в поверхность ротора двигателя или прикрепленные к ней. Магниты используются для создания постоянного магнитного потока двигателя, вместо того, чтобы требовать, чтобы поле статора создавало его путем соединения с ротором, как в случае с асинхронным двигателем.Четвертый двигатель, известный как двигатель с постоянными магнитами с линейным запуском (LSPM), объединяет характеристики обоих двигателей. Двигатель LSPM включает в себя магниты двигателя с постоянными магнитами внутри ротора и стержни ротора двигателя с короткозамкнутым ротором для максимального увеличения крутящего момента и эффективности (см. Таблицу 1).
Поток, потокосцепление и магнитный поток
Чтобы понять принцип действия двигателей с постоянными магнитами, важно сначала понять концепции магнитного потока, потокосцепления и магнитного потока.
Flux: Прохождение тока через проводник создает магнитное поле.Поток определяет скорость потока собственности на единицу площади. Ток потока — это скорость протекания тока через заданную площадь поперечного сечения проводника.
Потоковая связь: Потоковая связь возникает, когда магнитное поле взаимодействует с материалом, например, когда магнитное поле проходит через катушку с проволокой. Потоковая связь определяется количеством обмоток и магнитным потоком, где ϕ используется для обозначения мгновенного значения изменяющегося во времени потока. Потоковая связь определяется следующим уравнением:
Магнитный поток: Магнитный поток определяется как скорость магнитного поля, протекающего через заданную площадь поперечного сечения проводника.Поле магнитного потока создается постоянным магнитом внутри или на поверхности двигателя с постоянными магнитами.
Индуктор: Индуктор — это элемент схемы, который состоит из проводящего провода, обычно в форме катушки.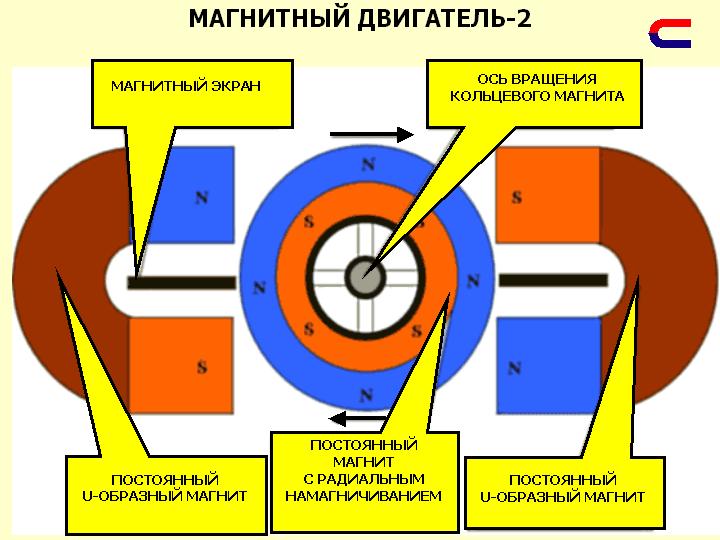 Проводник, по которому проходит постоянный ток, будет генерировать постоянное магнитное поле. Можно продемонстрировать, что магнитное поле и вызвавший его ток линейно связаны. Изменение магнитного поля вызовет в соседнем проводнике напряжение, пропорциональное скорости изменения тока, создавшего магнитное поле.Напряжение в проводнике определяется по следующей формуле:
Проводник, по которому проходит постоянный ток, будет генерировать постоянное магнитное поле. Можно продемонстрировать, что магнитное поле и вызвавший его ток линейно связаны. Изменение магнитного поля вызовет в соседнем проводнике напряжение, пропорциональное скорости изменения тока, создавшего магнитное поле.Напряжение в проводнике определяется по следующей формуле:
Индуктивность: Индуктивность (L) — это константа пропорциональности, которая определяет соотношение между напряжениями, индуцированными скоростью изменения тока во времени, создавшего магнитное поле. Проще говоря, индуктивность — это потокосцепление на единицу тока. Необходимо пояснить, что индуктивность — это пассивный элемент и чисто геометрическое свойство. Индуктивность измеряется в Генри (H) или Вебер-витках на ампер.
Ось d и ось q: С геометрической точки зрения оси «d» и «q» представляют собой однофазные представления потока, вносимого тремя отдельными синусоидальными фазовыми величинами при одинаковой угловой скорости. Ось d, также известная как прямая ось, представляет собой ось, по которой поток создается обмоткой возбуждения. Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению квадратурная ось всегда электрически опережает прямую ось на 90 градусов.Проще говоря, ось d является основным направлением потока, а ось q — основным направлением создания крутящего момента.
Ось d, также известная как прямая ось, представляет собой ось, по которой поток создается обмоткой возбуждения. Ось q или квадратурная ось — это ось, на которой создается крутящий момент. По соглашению квадратурная ось всегда электрически опережает прямую ось на 90 градусов.Проще говоря, ось d является основным направлением потока, а ось q — основным направлением создания крутящего момента.
Магнитная проницаемость: В электромагнетизме проницаемость — это мера способности материала поддерживать формирование магнитного поля внутри себя. Следовательно, это степень намагничивания, которую материал получает в ответ на приложенное магнитное поле.
Эквивалентная схема двигателя с постоянными магнитами: Двигатель с постоянными магнитами может быть представлен в нескольких различных моделях двигателей.Один из наиболее распространенных методов — модель двигателя d-q.
Индуктивность оси d и оси q двигателя с постоянными магнитами: Индуктивности оси d и оси q — это индуктивности, измеряемые при прохождении потока магнитного потока через ротор относительно магнитного полюса. Индуктивность по оси d — это индуктивность, измеренная, когда поток проходит через магнитные полюса. Индуктивность по оси q является мерой индуктивности при прохождении магнитного потока между магнитными полюсами.
Индуктивность по оси d — это индуктивность, измеренная, когда поток проходит через магнитные полюса. Индуктивность по оси q является мерой индуктивности при прохождении магнитного потока между магнитными полюсами.
В асинхронной машине потокосцепление ротора будет одинаковым между осью d и осью q.Однако в машине с постоянным магнитом магнит уменьшает доступное железо для магнитной связи. Магнитная проницаемость близка к воздухопроницаемости. Таким образом, магнит можно рассматривать как воздушный зазор. Магнит находится на пути потока, когда он проходит через ось d. Путь потока, проходящего через ось q, не пересекает магнит. Следовательно, больше железа может быть связано с путем потока по оси q, что приводит к большей индуктивности. Двигатель со встроенным магнитом будет иметь большую индуктивность по оси q, чем индуктивность по оси d.Двигатель с магнитами для поверхностного монтажа будет иметь почти идентичные индуктивности по оси q и d, потому что магниты находятся вне ротора и не ограничивают количество железа, связанного полем статора.
Магнитная значимость: Заметность или заметность — это состояние или качество, благодаря которым что-то выделяется по сравнению со своими соседями. Магнитная яркость описывает соотношение между индуктивностью основного потока ротора (ось d) и индуктивностью, создающей основной крутящий момент (ось q).Магнитная яркость изменяется в зависимости от положения ротора по отношению к полю статора, где максимальная заметность возникает при 90 электрических градусах от оси главного потока (ось d) (см. Рисунок 1).
Ток возбуждения: Ток возбуждения — это «ток в обмотках статора, необходимый для создания магнитного потока в сердечнике ротора». Машины с постоянными магнитами не требуют тока возбуждения в обмотке статора, потому что магниты двигателя с постоянными магнитами уже создают постоянное магнитное поле.
Вторичный ток: Вторичный ток, иначе известный как «ток, создающий крутящий момент», — это ток, необходимый для создания крутящего момента двигателя. В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
В машине с постоянными магнитами токи, создающие крутящий момент, составляют большую часть потребляемого тока.
Потребляемый ток: В отличие от усилителя и согласованного сервопривода, предназначенного для управления движением, обычный частотно-регулируемый привод не имеет информации о положении магнитного полюса ротора двигателя.Без знания положения магнитного полюса в статоре невозможно создать поле для максимального увеличения крутящего момента. Следовательно, частотно-регулируемый привод может подавать постоянное напряжение для фиксации магнитного поля в известном положении. Потребляемый ток, необходимый для втягивания ротора, называется «ток втягивания».
Высокочастотный впрыск: Высокочастотный впрыск — это методология инвертора, используемая для определения положения магнитного полюса двигателя с постоянными магнитами. Метод начинается с того, что инвертор подает высокочастотный сигнал низкого напряжения в двигатель на произвольной оси. Затем инвертор изменяет угол возбуждения и контролирует ток.
Затем инвертор изменяет угол возбуждения и контролирует ток.
В зависимости от угла впрыска изменяется импеданс ротора. Импеданс клеммы двигателя с внутренним постоянным магнитом (IPM) уменьшается, когда ось подачи высокочастотного сигнала и ось магнитного полюса (ось d) совмещены, то есть при 0 градусах. Максимальное сопротивление составляет ± 90 град. Используя эту характеристику, привод может определять положение ротора без импульсных энкодеров, подавая высокочастотное переменное напряжение / ток на двигатель IPM.Более того, метод подачи высокочастотного сигнала может использоваться для определения скорости в области низких скоростей, где обычно управление крутящим моментом при полной нагрузке очень затруднено, поскольку уровень напряжения обратной ЭДС двигателя слишком низкий.
Форма сигнала обратной ЭДС
Обратная ЭДС — это сокращение от обратной электродвижущей силы, но также известно как противодвижущая сила. Противоэлектродвижущая сила — это напряжение, которое возникает в электродвигателях при относительном движении обмоток статора и магнитного поля ротора. Геометрические свойства ротора будут определять форму сигнала обратной ЭДС. Эти формы сигналов могут быть синусоидальными, трапецеидальными, треугольными или чем-то средним.
Геометрические свойства ротора будут определять форму сигнала обратной ЭДС. Эти формы сигналов могут быть синусоидальными, трапецеидальными, треугольными или чем-то средним.
Как индукционные, так и ФЭ машины генерируют сигналы обратной ЭДС. В индукционной машине форма волны обратной ЭДС будет затухать, так как остаточное поле ротора будет медленно затухать из-за отсутствия поля статора. Однако в машине с постоянным магнитом ротор создает собственное магнитное поле. Следовательно, напряжение может индуцироваться в обмотках статора всякий раз, когда ротор находится в движении.Напряжение обратной ЭДС линейно возрастает со скоростью и является решающим фактором при определении максимальной рабочей скорости.
Общие сведения о крутящем моменте машины с PM
Крутящий момент электрической машины можно разделить на две составляющие: магнитный момент и момент сопротивления. Момент сопротивления — это «сила, действующая на магнитный материал, которая стремится выровняться с основным магнитным потоком, чтобы минимизировать сопротивление». Другими словами, реактивный крутящий момент — это крутящий момент, создаваемый выравниванием вала ротора относительно магнитного поля статора.Магнитный крутящий момент — это «крутящий момент, создаваемый взаимодействием магнитного поля магнита с током в обмотке статора».
Момент сопротивления: Момент сопротивления относится к крутящему моменту, генерируемому при выравнивании ротора, который возникает, когда магнитное поле заставляет желаемый прямой поток от северного полюса статора к южному полюсу статора.
Магнитный момент: Постоянные магниты создают магнитное поле в роторе.Статор создает поле, которое взаимодействует с магнитным полем ротора. Изменение положения поля статора по отношению к полю ротора вызывает смещение ротора. Сдвиг из-за этого взаимодействия и есть магнитный момент.
SPM в сравнении с IPM
Двигатели с постоянными магнитами можно разделить на две основные категории: двигатели с поверхностными постоянными магнитами (SPM) и двигатели с внутренними постоянными магнитами (IPM) (см. Рисунок 3). Ни один из типов конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
Рисунок 3). Ни один из типов конструкции двигателя не содержит стержней ротора. Оба типа генерируют магнитный поток постоянными магнитами, прикрепленными к ротору или внутри него.
SPM магниты прикреплены к внешней поверхности ротора. Из-за такого механического крепления их механическая прочность ниже, чем у двигателей IPM. Ослабленная механическая прочность ограничивает максимальную безопасную механическую скорость двигателя. Кроме того, эти двигатели обладают очень ограниченной магнитной яркостью (L d ≈ L q ). Значения индуктивности, измеренные на выводах ротора, одинаковы независимо от положения ротора. Из-за почти единичного коэффициента выраженности конструкции двигателей SPM в значительной степени, если не полностью, полагаются на магнитную составляющую крутящего момента для создания крутящего момента.
В двигателях IPM постоянный магнит встроен в сам ротор. В отличие от своих собратьев SPM, расположение постоянных магнитов делает двигатели IPM очень прочными с механической точки зрения и пригодными для работы на очень высоких скоростях. Эти двигатели также отличаются относительно высоким коэффициентом магнитной яркости (L q > L d ). Из-за своей магнитной заметности двигатель IPM может генерировать крутящий момент, используя как магнитные, так и реактивные компоненты крутящего момента двигателя (см. Рисунок 4).
Эти двигатели также отличаются относительно высоким коэффициентом магнитной яркости (L q > L d ). Из-за своей магнитной заметности двигатель IPM может генерировать крутящий момент, используя как магнитные, так и реактивные компоненты крутящего момента двигателя (см. Рисунок 4).
Моторные конструкции ПМ
Конструкции двигателейPM можно разделить на две категории: внутренние и поверхностные. У каждой категории есть свое подмножество категорий. Поверхностный двигатель с постоянными магнитами может иметь свои магниты на поверхности ротора или вставленные в него, чтобы повысить надежность конструкции. Расположение и дизайн внутреннего двигателя с постоянными магнитами могут сильно различаться. Магниты двигателя IPM могут быть вставлены в виде большого блока или смещены по мере приближения к сердечнику.Другой метод — вставить их в узор спиц.
Изменение индуктивности двигателя с постоянными магнитами под нагрузкой
Только такое количество магнитного потока может быть связано с куском железа для создания крутящего момента.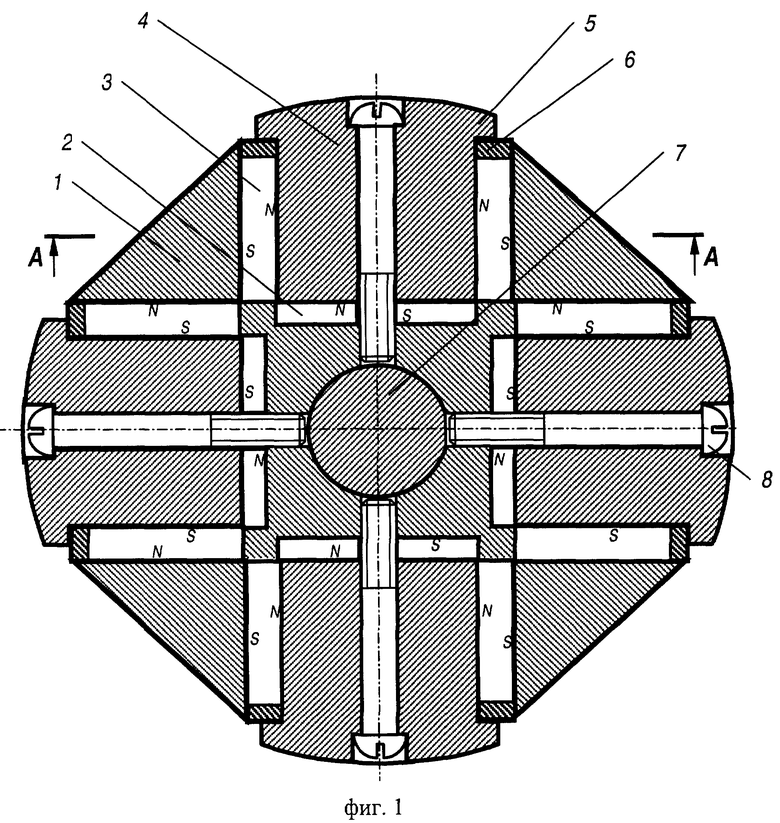 В конце концов, железо насыщается и больше не позволяет флюсу связываться. В результате уменьшается индуктивность пути, проходимого магнитным полем. В машине с постоянным магнитом значения индуктивности по оси d и q будут уменьшаться с увеличением тока нагрузки.
В конце концов, железо насыщается и больше не позволяет флюсу связываться. В результате уменьшается индуктивность пути, проходимого магнитным полем. В машине с постоянным магнитом значения индуктивности по оси d и q будут уменьшаться с увеличением тока нагрузки.
Индуктивности по осям d и q двигателя SPM почти идентичны.Поскольку магнит находится вне ротора, индуктивность оси q будет падать с той же скоростью, что и индуктивность оси d. Однако индуктивность двигателя IPM будет уменьшаться иначе. Опять же, индуктивность по оси d, естественно, ниже, потому что магнит находится на пути потока и не создает индуктивных свойств. Следовательно, по оси d меньше железа для насыщения, что приводит к значительно меньшему снижению магнитного потока по отношению к оси q.
Ослабление / усиление потока двигателей с постоянными магнитами
Поток в двигателе с постоянными магнитами создается магнитами.Поле потока следует определенному пути, который можно усилить или противодействовать. Повышение или усиление магнитного поля позволит двигателю временно увеличить производство крутящего момента. Противодействие полю магнитного потока устранит существующее магнитное поле двигателя. Уменьшение магнитного поля ограничит производство крутящего момента, но уменьшит напряжение обратной ЭДС. Пониженное напряжение обратной ЭДС высвобождает напряжение, заставляя двигатель работать с более высокими выходными скоростями. Оба типа работы требуют дополнительного тока двигателя. Направление тока двигателя поперек оси d, обеспечиваемое контроллером двигателя, определяет желаемый эффект.
Повышение или усиление магнитного поля позволит двигателю временно увеличить производство крутящего момента. Противодействие полю магнитного потока устранит существующее магнитное поле двигателя. Уменьшение магнитного поля ограничит производство крутящего момента, но уменьшит напряжение обратной ЭДС. Пониженное напряжение обратной ЭДС высвобождает напряжение, заставляя двигатель работать с более высокими выходными скоростями. Оба типа работы требуют дополнительного тока двигателя. Направление тока двигателя поперек оси d, обеспечиваемое контроллером двигателя, определяет желаемый эффект.
Угол возбуждения
Угол возбуждения — это угол, под которым векторная сумма сигналов оси d и осей q возбуждается в двигателе относительно оси d. Ось d всегда рассматривается там, где находится магнит. Максимальный магнитный поток достигается на оси q, которая составляет 90 электрических градусов от оси d. Поэтому в большинстве ссылок на угол возбуждения уже учтена разница в 90 градусов от оси d до оси q.
Фазовый угол и крутящий момент
Магнитный крутящий момент максимизируется, когда поле статора возбуждает ротор двигателя на 90 электрических градусов от оси d (положение магнита двигателя).Крутящий момент сопротивления движется по другому пути и достигает максимума на 45 электрических градусов за осью q. В максимальном магнитном моменте используется как магнитное сопротивление двигателя, так и магнитные моменты. Сдвиг дальше от оси q уменьшает магнитный момент, но намного перевешивается усилением реактивного момента. Максимальный комбинированный магнитный и реактивный крутящий момент возникает около 45 электрических градусов от оси q, но точный угол будет варьироваться в зависимости от характеристик двигателя с постоянными магнитами.
Удельная мощность двигателя IPM
Мощность двигателя с постоянными магнитами зависит от конфигурации магнитов двигателя и получаемой мощности двигателя.Двигатели с высоким коэффициентом резкости (Lq> Ld) могут повысить КПД двигателя и выработку крутящего момента за счет включения реактивного крутящего момента двигателя. Инвертор можно использовать для изменения угла возбуждения по отношению к оси d, чтобы максимизировать как реактивный момент, так и магнитный момент двигателя.
Инвертор можно использовать для изменения угла возбуждения по отношению к оси d, чтобы максимизировать как реактивный момент, так и магнитный момент двигателя.
Типы магнитов двигателя с постоянными магнитами
В настоящее время для электродвигателей используется несколько типов материалов с постоянными магнитами. У каждого вида металла есть свои достоинства и недостатки.
Размагничивание постоянного магнита
Постоянные магниты трудно назвать постоянными, и их возможности ограничены. На эти материалы можно воздействовать определенными силами, размагничивающими их. Другими словами, можно удалить магнитные свойства материала постоянного магнита. Вещество с постоянным магнитом может размагнититься, если материал значительно деформируется, нагревается до значительных температур или подвергается воздействию сильного электрического возмущения.
Во-первых, напряжение постоянного магнита обычно осуществляется физическими средствами. Магнитный материал может размагнититься, если не ослабнуть, если он подвергнется сильным ударам / падению. Ферромагнитный материал обладает магнитными свойствами. Однако эти магнитные свойства могут излучать в любом множестве направлений. Один из способов намагничивания ферромагнитных материалов — это приложение к материалу сильного магнитного поля для выравнивания его магнитных диполей. Выравнивание этих диполей направляет магнитное поле материала в определенную ванну.Сильный удар может нарушить атомную ориентацию магнитных доменов материала, что ослабит силу предполагаемого магнитного поля.
Магнитный материал может размагнититься, если не ослабнуть, если он подвергнется сильным ударам / падению. Ферромагнитный материал обладает магнитными свойствами. Однако эти магнитные свойства могут излучать в любом множестве направлений. Один из способов намагничивания ферромагнитных материалов — это приложение к материалу сильного магнитного поля для выравнивания его магнитных диполей. Выравнивание этих диполей направляет магнитное поле материала в определенную ванну.Сильный удар может нарушить атомную ориентацию магнитных доменов материала, что ослабит силу предполагаемого магнитного поля.
Во-вторых, на постоянный магнит могут влиять и температуры. Температуры заставляют магнитные частицы в постоянном магните взволноваться. Магнитные диполи обладают способностью выдерживать некоторое тепловое колебание. Однако длительные периоды перемешивания могут ослабить силу магнита, даже если он хранится при комнатной температуре. Кроме того, все магнитные материалы имеют порог, известный как «температура Кюри», который является порогом, определяющим температуру, при которой тепловое перемешивание вызывает полное размагничивание материала. Такие термины, как коэрцитивная сила и удерживающая способность, используются для определения способности магнитного материала сохранять прочность.
Такие термины, как коэрцитивная сила и удерживающая способность, используются для определения способности магнитного материала сохранять прочность.
Наконец, большие электрические помехи могут вызвать размагничивание постоянного магнита. Эти электрические возмущения могут возникать из-за взаимодействия материала с большим магнитным полем или из-за того, что через материал проходит большой ток. Примерно так же, как сильное магнитное поле или ток можно использовать для выравнивания магнитных диполей материала, другое сильное магнитное поле или ток, приложенный к полю, создаваемому постоянным магнитом, может привести к размагничиванию.
Самоопределение в сравнении с режимом замкнутого контура
Последние достижения в области приводной техники позволяют стандартным приводам переменного тока «самообнаруживать» и отслеживать положение магнита двигателя. Система с обратной связью обычно использует канал z-импульса для оптимизации производительности. Благодаря определенным процедурам привод знает точное положение магнита двигателя, отслеживая каналы A / B и исправляя ошибки с помощью канала z. Знание точного положения магнита позволяет добиться оптимального крутящего момента, что приводит к оптимальной эффективности.
Знание точного положения магнита позволяет добиться оптимального крутящего момента, что приводит к оптимальной эффективности.
Серводвигатели
Серводвигатели— это двигатели с постоянными магнитами, используемые для управления движением. Как правило, в конструкции двигателя с внутренним / внутренним постоянным магнитом эти двигатели соединяются с определенным усилителем как часть согласованного набора для достижения максимальной производительности. Усилитель был точно настроен на двигатель с постоянными магнитами для достижения оптимальных характеристик его производителем. Конфигурация усилителя движения / сервопривода обычно использует обратную связь двигателя, которая также обеспечивает обратную связь по положению магнитного полюса и скорости.
Кристофер Ящолт — специалист по управлению приводными продуктами в Yaskawa America Inc. Он имеет более девяти лет опыта в области управления движением. В дополнение к своей нынешней должности Ящолт работал инженером технической поддержки и инженером по приложениям. Имеет степень BSEE Университета Северного Иллинойса, Де-Калб, Иллинойс,
Имеет степень BSEE Университета Северного Иллинойса, Де-Калб, Иллинойс,
Эта статья появляется в приложении Applied Automation для Control Engineering
и Plant Engineering.
Индукция против. КПД двигателя с постоянным магнитом
Поскольку электрификация автомобилей продолжается ускоренными темпами, многие задаются вопросом, какой тип двигателя лучше всего подходит для современной электрической трансмиссии.
Может быть трехфазный асинхронный двигатель или двигатель с постоянными магнитами? Оба мотора в настоящее время используются в электромобилях. Оба предлагают высокую эффективность и хорошую производительность. Но что лучше?
Существует веский аргумент в пользу того, что двигатель с постоянными магнитами лучше , чем асинхронный двигатель.Неотъемлемые преимущества порошковой металлургии — возможность увеличения производительности двигателя и снижения общей стоимости — могут быть эффективным инструментом при производстве этих приводных систем.
Давайте проведем несколько сравнений эффективности асинхронных двигателей с двигателями с постоянными магнитами, чтобы увидеть их преимущества и потенциальные недостатки. Мелкие детали конструкции электродвигателя более сложны, чем описано ниже, но это отличное начало для тех, кто взвешивает свои варианты.
КПД двигателя с постоянным магнитом
Как следует из названия, электромотор с постоянными магнитами использует постоянные магниты на роторе (см. Рисунок ниже).Переменный ток, приложенный к статору, приводит к вращению ротора. Поскольку магниты постоянно намагничены, ротор может работать синхронно с коммутируемым переменным током. Исключается проскальзывание, необходимое в асинхронных двигателях, повышает тепловую эффективность.
Собственный КПД двигателя с постоянными магнитами выше, чем у асинхронного двигателя. Оба двигателя имеют трехфазную конструкцию благодаря полностью оптимизированной производительности. Однако асинхронные двигатели были разработаны для работы в основном на частоте 60 Гц. При увеличении частоты потери на вихревые токи в асинхронных двигателях будут намного больше, чем в двигателях с постоянными магнитами, использующих технологию порошкового металла.
При увеличении частоты потери на вихревые токи в асинхронных двигателях будут намного больше, чем в двигателях с постоянными магнитами, использующих технологию порошкового металла.
Независимо от того, как вы изгибаете или формируете асинхронный двигатель, хорошо спроектированный синхронный двигатель с постоянными магнитами обеспечит увеличенный диапазон, лучшую производительность и так далее.
Использование материала двигателя с постоянным магнитом
В постоянном магните ротор теперь может быть цельной деталью, например, из магнитного материала порошковой металлургии методом прессования и спекания.Вы можете сконструировать ротор таким образом, чтобы магниты были приклеены к внешнему диаметру или заключены в ротор, как показано ниже:
( Сравнение асинхронного двигателя переменного тока и двигателя с постоянными магнитами)
Необязательно делать из листовой электротехнической стали! Ротор из порошкового металла может иметь прорези, которые вы видите на изображении выше, спроектированные за счет чистой формы порошкового металла, что устраняет необходимость в дорогостоящей обработке. Используя спеченный магнитомягкий материал, силовой металлический ротор для двигателя с постоянными магнитами может достичь прочности, аналогичной конкурирующим процессам.
Используя спеченный магнитомягкий материал, силовой металлический ротор для двигателя с постоянными магнитами может достичь прочности, аналогичной конкурирующим процессам.
Однако индукционный ротор по-прежнему требует штамповки и ламинирования. В процессе штамповки образуется гораздо больше отходов, чем при порошковой металлургии.
Применение постоянных магнитов в двигателях
Постоянный двигатель мощностью 50 кВт (около 70 л.с.) обычно весит менее 30 фунтов. (Обратите внимание, что вам все равно понадобится инвертор постоянного тока в переменный, чтобы генерировать достаточное напряжение и частоту.)
Использование двигателей с постоянными магнитами в автомобильной промышленности включает в себя Chevy Volt (производство прекращено), Chevy Bolt и Tesla Model 3.
- Chevy Bolt — это конструкция мощностью 200 л.с. с магнитами внутри ротора. В нем используется односкоростной редуктор с соотношением 7,05 к 1 для привода колес. Общедоступных оценок веса нет.
- Tesla Model 3 также использует двигатель с постоянными магнитами. Доступно очень мало деталей, но ходят слухи, что магниты расположены в виде массива Halback. Этот массив фокусирует магнитные линии потока для полной оптимизации производительности.
 Общедоступных оценок веса нет.
Общедоступных оценок веса нет.Скорость двигателя с постоянными магнитами такая же, как и у его индукционного аналога:
- Ns = 120 * частота / количество полюсов
(Ns — синхронная скорость.Число полюсов — это общее число полюсов на фазу, включая северный и южный полюса.)
Помните, что ротор не будет проскальзывать относительно рабочей частоты статора.
Стоимость против. Производительность
Одним из основных факторов, влияющих на двигатели с постоянными магнитами, является стоимость магнитов. Если вы использовали высокоэнергетические магниты (такие как железо, неодим, бор), вы почувствовали боль в своем бюджете (или у вашего начальника). Потенциальные потери при штамповке материала для ламинирования только усугубляют проблему.
Потенциальные потери при штамповке материала для ламинирования только усугубляют проблему.
Возможности для порошковой металлургии в этих типах двигателей широкие. Роторы двигателя с постоянными магнитами могут быть изготовлены из спеченного порошкового металла, независимо от того, выбираете ли вы внутренний или внешний путь проектирования. Статор также может быть изготовлен из магнитомягких композитов. При ожидаемых высоких частотах переключения потери в SMC ниже, чем в ламинированном 3% -ном кремниевом железе, еще больше повышает эффективность этой конструкции. Проще говоря, магнитомягкие композиты созданы специально для высоких частот.
Металлический порошок может повысить эффективность двигателя с постоянными магнитами по сравнению с асинхронным двигателем. Возможности порошковой металлургии создавать трехмерные формы позволяют формировать статор, полностью покрывающий весь провод магнитомягким композитом, чтобы исключить потери в конце витка. .
Это некоторые из многих преимуществ, которые предлагает порошковый металл — как спеченные магнитомягкие материалы, так и SMC.
(Кривая КПД двигателя с постоянным магнитом в зависимости отасинхронные двигатели. Эта диаграмма характеристик была разработана для частоты сети около 60 Гц. По мере увеличения частоты ожидайте, что производительность станет еще лучше. График любезно предоставлен Empowering Pumps & Equipment )
Вышеупомянутое обсуждение было сосредоточено на рассмотрении двигателей с постоянными магнитами, в которых используются конструкции статора, подобные тем, что используются в асинхронных двигателях переменного тока. Тем не менее, было сделано основных разработок в конструкции двигателей нового типа , в которых также используются постоянные магниты для повышения эффективности электродвигателя.
Linear Labs разработала новую схему двигателя, сочетающую высокую эффективность с прочной конструкцией. Он устраняет некоторые из дорогих редкоземельных магнитов, с которыми вы привыкли годами.
Мы думаем, что двигатели с постоянными магнитами — это волна будущего. Для полноты картины давайте теперь посмотрим на конструкцию асинхронного двигателя, с которой работают 90% инженеров.
Для полноты картины давайте теперь посмотрим на конструкцию асинхронного двигателя, с которой работают 90% инженеров.
КПД трехфазного асинхронного двигателя переменного тока
Никола Тесла изобрел асинхронный двигатель в 1883 году.Это принципиально та же базовая конструкция статора, что и у постоянного двигателя, но без постоянных магнитов.
Его основной принцип работы заключается в том, что магнитное поле, создаваемое в статоре, создает встречный ток в стержнях ротора. Индуцированный ток ротора затем создает магнитное поле в пластинах ротора. Это противоположное поле заставляет ротор вращаться — при переключении тока статора ротор всегда отстает и заставляет ротор вращаться.
Преимущества этого индуцированного магнитного поля заключаются в том, что не нужны ни щетки, ни обмотка ротора.Двигатели этого типа:
- Надежный
- Прочный
- Низкие эксплуатационные расходы
Выше представлена типичная конфигурация асинхронного двигателя.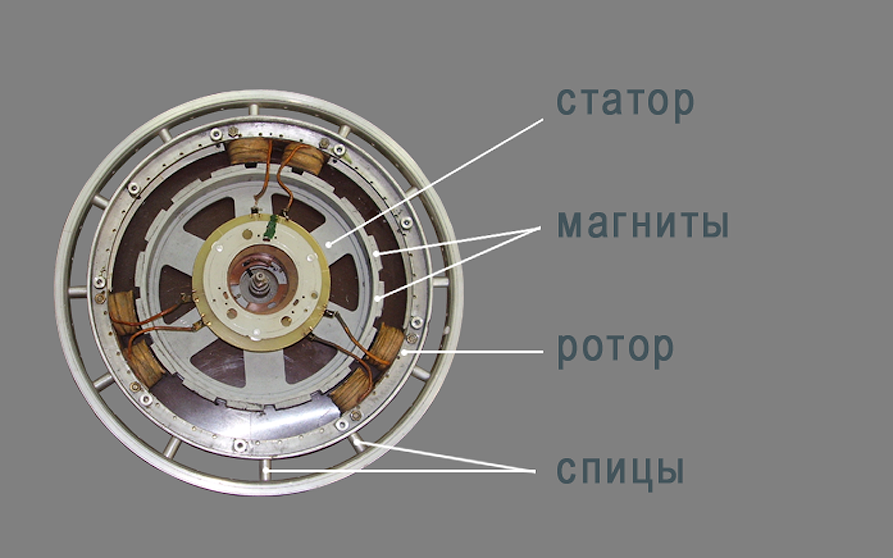 Обратите внимание, что ротор имеет пластинки в сердечнике и электропроводящий материал (медь или алюминий) в пазах ротора, так называемых стержнях ротора.
Обратите внимание, что ротор имеет пластинки в сердечнике и электропроводящий материал (медь или алюминий) в пазах ротора, так называемых стержнях ротора.
Для большинства промышленных применений (более 1 л.с.) и для автомобильных трансмиссий трехфазный асинхронный двигатель является наиболее распространенным.В этой конструкции три фазы обернуты вокруг статора таким образом, чтобы обеспечить более плавную работу и высокий КПД. Трехфазные двигатели переменного тока самозапускаются при подаче напряжения на обмотки статора. Во многих случаях так называемые стержни ротора расположены под углом для увеличения крутящего момента.
КПД асинхронного двигателя переменного тока на практике
Трехфазное использование в промышленных приложениях относительно просто, поскольку входящее напряжение уже является трехфазным. Однако в автомобильной промышленности вам необходимо преобразовать мощность постоянного тока аккумулятора в трехфазный переменный ток.Это происходит через преобразователь постоянного тока в переменный.
В асинхронных двигателях переменного тока необходимо учитывать скорость ротора относительно входящей частоты переменного тока. Первоначально это определяется так называемой синхронной скоростью. Для асинхронного двигателя переменного тока синхронная скорость рассчитывается следующим образом:
- Ns = 120 * частота / количество полюсов
(Помните, что Ns — это синхронная скорость. Число полюсов — это общее число полюсов на фазу, включая северный и южный полюса.)
Для двухполюсного асинхронного двигателя переменного тока, работающего на частоте 60 Гц, синхронная скорость двигателя будет 3600 об / мин. Однако, если бы ротор вращался со скоростью 3600 об / мин в этой конфигурации, у вас был бы нулевой крутящий момент от двигателя. В идеале должно быть некоторое проскальзывание ротора относительно частоты; обычно это около 5%. Таким образом, эти двигатели считаются асинхронными двигателями.
КПД трехфазных асинхронных двигателей может варьироваться от 85% до 96%. См. Таблицу ниже для зависимости крутящего момента отсоскальзывать.
См. Таблицу ниже для зависимости крутящего момента отсоскальзывать.
(Типичный крутящий момент в зависимости от скольжения для асинхронных двигателей переменного тока — любезно предоставлено All About Circuits )
Асинхронные двигатели мощностью 50–100 л.с. для промышленного применения различаются по массе от 700 до почти 1000 фунтов. Слишком тяжелый для автомобильного применения, правда?
Утверждается, что некоторые модели асинхронных двигателей Tesla весят всего 70 фунтов. и может генерировать 360 л.с. при 18000 об / мин. Общий вес двигателя и инвертора составляет около 350 фунтов.- все еще намного легче, чем средний двигатель внутреннего сгорания.
Этот двигатель представляет собой трехфазную конструкцию с восемью полюсами на фразу, что означает, что частота переменного тока, используемая для выработки этой мощности, составляет около 1200 Гц. На этих рабочих частотах вихретоковый нагрев материала ламинирования будет довольно высоким. Этот автомобильный двигатель Tesla требует значительного охлаждения, чтобы не допустить его перегрева. Также немного иронично, что GM представила свой автомобиль EV1 в середине 90-х годов с асинхронным двигателем, который был ограничен тем, что в нем использовались свинцово-кислотные вместо литий-ионных батарей.
Этот автомобильный двигатель Tesla требует значительного охлаждения, чтобы не допустить его перегрева. Также немного иронично, что GM представила свой автомобиль EV1 в середине 90-х годов с асинхронным двигателем, который был ограничен тем, что в нем использовались свинцово-кислотные вместо литий-ионных батарей.
Стоимость асинхронных двигателей
Ключевым преимуществом асинхронных двигателей переменного тока для электромобилей является стоимость. Они относительно дешевы в сборке.
В индукционных конструкцияхпеременного тока используются стальные пластины как в статоре, так и в роторе; их можно штамповать почти одновременно из одного листа материала. Другими словами, процент брака намного ниже, чем у вашей средней работы по штамповке.
Однако уникальный дизайн автомобильного мотора Тесла немного дороже.Трудно найти точную цену в Интернете, но вариант с полным приводом для Tesla добавляет около 4000 долларов к общей стоимости автомобиля. Вы также должны учитывать повышенные требования к охлаждению на этих высоких частотах переменного тока.
Вы также должны учитывать повышенные требования к охлаждению на этих высоких частотах переменного тока.
Индукция против. Эффективность двигателя с постоянным магнитом: победитель …
Несмотря на преимущества использования магнитомягких материалов в двигателе с постоянными магнитами (SMC не являются фактором в индукционных конструкциях), выбор типа двигателя для вашей трансмиссии затруднен.У каждого есть свои преимущества и недостатки.
Несмотря на то, что асинхронный двигатель переменного тока был впервые разработан более 100 лет назад, он по-прежнему жизнеспособен благодаря повышению эффективности и производительности в 20-м и 21-м веках. Двигатель с постоянными магнитами — относительная новинка, но обещает более высокую производительность и, возможно, меньший вес.
Основным камнем преткновения для двигателей с постоянными магнитами является потенциально высокая стоимость магнитов. К счастью, на горизонте есть многообещающие разработки, которые могут устранить этот недостаток.
Мы пользуемся услугами уважаемого дизайнера двигателей, чтобы помочь клиентам в реализации подобных проектов. Если вам нужна помощь в разработке компонентов, чтобы в полной мере использовать весь потенциал порошковой металлургии для магнитных приложений переменного или постоянного тока, посетите наш новый ресурсный центр или свяжитесь с нами!
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора.Эти обмотки могут быть соединены либо по схеме звезды, обычно без внешнего подключения к нейтральной точке, либо по схеме треугольник. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.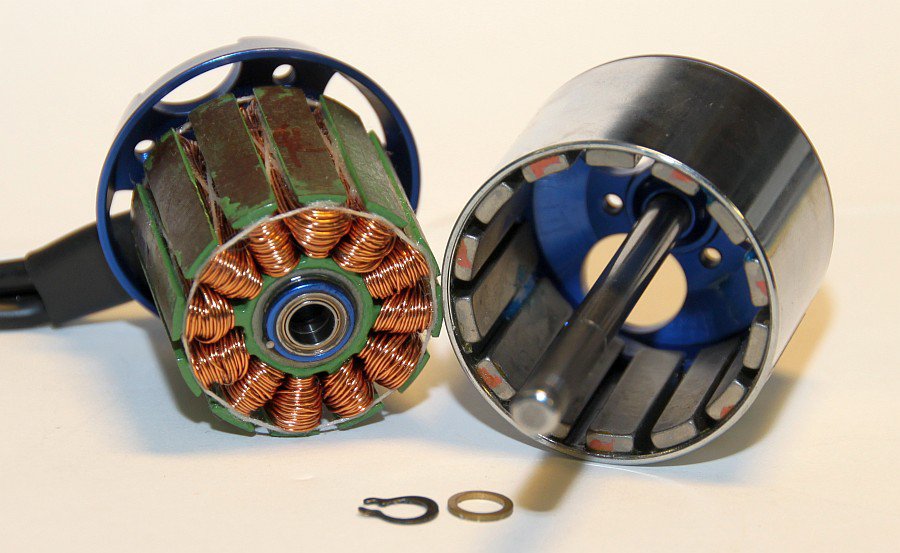
Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора.На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести моментов цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке, ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу.В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, а в фазе b и фазе a — половинное значение. положительный. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, состоит в создании вращающегося магнитного поля с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
положительный. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, состоит в создании вращающегося магнитного поля с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке показана диаграмма токов ротора для мгновенного t 1 рисунка. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopædia Britannica, Inc. Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для двигателей большой мощности и до около 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора, чтобы произвести ток ротора, необходимый для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора, чтобы произвести ток ротора, необходимый для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с использованием катушек, охватывающих угол приблизительно (360/ p ) °.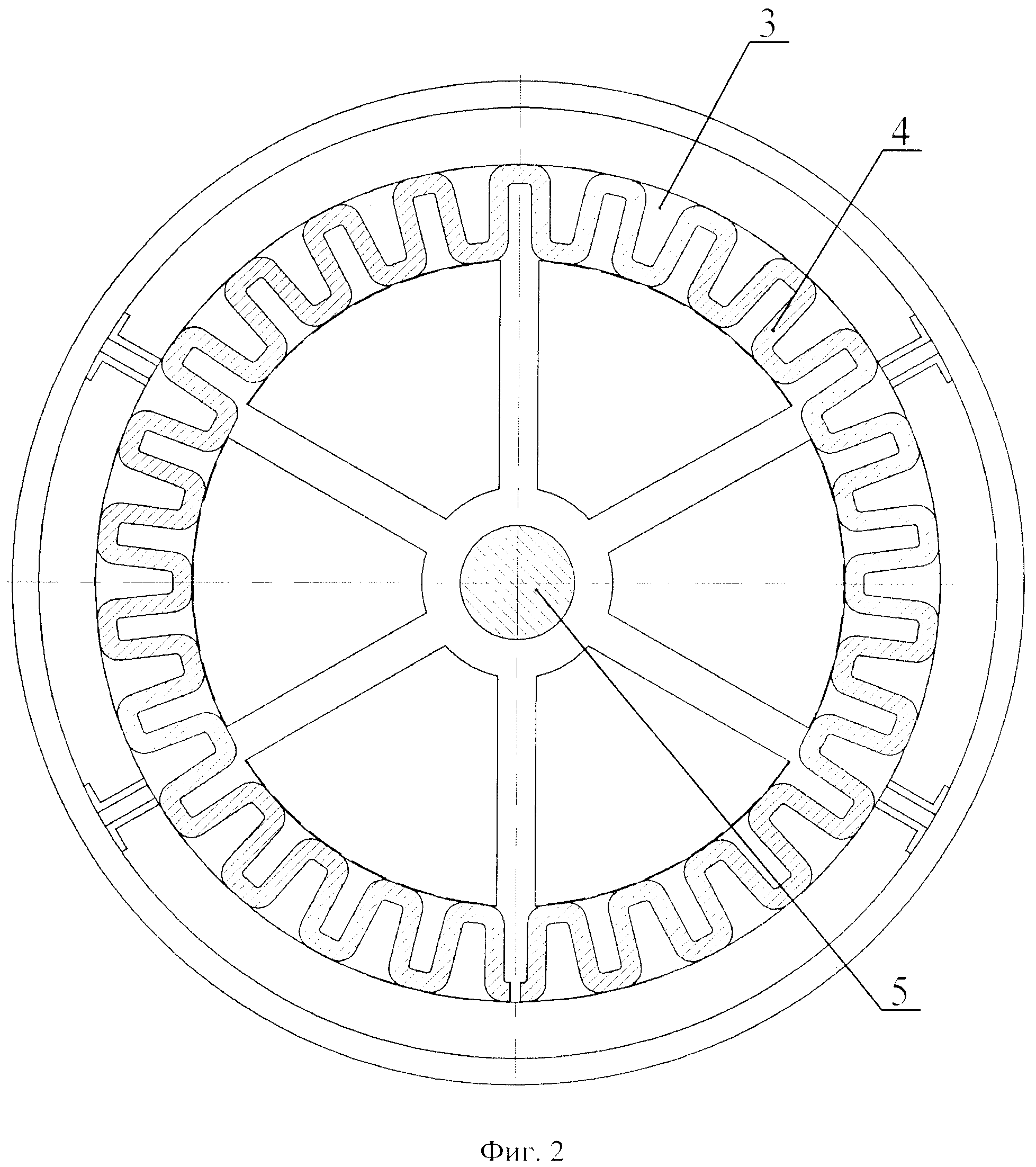 Крутящий момент, поступающий от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Крутящий момент, поступающий от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
и синхронные двигатели с постоянными магнитами
* Изображение предоставлено New Energy и Fuel.com
Авторы : Стив Бистак, региональный менеджер по продажам — NE, Департамент приводов переменного тока / HMI, Fuji Electric Corp. of America, и Sun Y. Kim (Sean), старший региональный менеджер, ACDR / HMI, Fuji Electric Corp of America
Большинство насосов и вентиляторов, работающих в промышленных и коммерческих целях, в настоящее время приводится в действие асинхронными двигателями переменного тока. «ACIM», что означает «асинхронный двигатель переменного тока», представляет собой асинхронный тип двигателя, в котором для вращения ротора используется электрический ток. Крутящий момент создается электрическим током в роторе. Электрический ток создается за счет электромагнитной индукции магнитного поля обмоток статора. В ACIM ротор всегда вращается с меньшей скоростью, чем магнитное поле. «PMSM», что означает «синхронный двигатель с постоянными магнитами», основан на использовании магнитов для вращения ротора, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле PMSM.
«ACIM», что означает «асинхронный двигатель переменного тока», представляет собой асинхронный тип двигателя, в котором для вращения ротора используется электрический ток. Крутящий момент создается электрическим током в роторе. Электрический ток создается за счет электромагнитной индукции магнитного поля обмоток статора. В ACIM ротор всегда вращается с меньшей скоростью, чем магнитное поле. «PMSM», что означает «синхронный двигатель с постоянными магнитами», основан на использовании магнитов для вращения ротора, который вращается с той же скоростью, что и внутреннее вращающееся магнитное поле PMSM.
Есть несколько ключевых различий между асинхронными двигателями переменного тока и синхронными двигателями с постоянными магнитами.
Двигатели с постоянными магнитами ДОЛЖНЫ работать с приводом.
Асинхронные двигатели переменного тока могут использоваться без частотно-регулируемого привода для привода насоса или вентилятора, но часто устанавливаются с частотно-регулируемыми приводами (VFD) в насосных или вентиляционных системах, чтобы повысить эффективность системы. Синхронным двигателям с постоянными магнитами для работы требуется привод. PMSM не могут работать без привода.ЧРП необходим для точного управления скоростью PMSM в соответствии с требованиями приложения к давлению, расходу, объему и т. Д. Некоторые новые VFD уже поставляются с опциями управления двигателем с постоянными магнитами в качестве стандартной функции, что позволяет операторам управлять двигателем с постоянными магнитами. для более эффективного управления вентилятором и / или насосом.
Синхронным двигателям с постоянными магнитами для работы требуется привод. PMSM не могут работать без привода.ЧРП необходим для точного управления скоростью PMSM в соответствии с требованиями приложения к давлению, расходу, объему и т. Д. Некоторые новые VFD уже поставляются с опциями управления двигателем с постоянными магнитами в качестве стандартной функции, что позволяет операторам управлять двигателем с постоянными магнитами. для более эффективного управления вентилятором и / или насосом.
Двигатели с постоянными магнитами обеспечивают значительное повышение эффективности по сравнению с асинхронными двигателями переменного тока.
Эффективность полной нагрузки двигателя с постоянными магнитами выше, чем у асинхронного двигателя переменного тока.На рисунке 1 ниже показаны диапазоны эффективности между двумя стандартами асинхронных двигателей переменного тока и известными опубликованными двигателями с постоянными магнитами.
Рисунок 1 .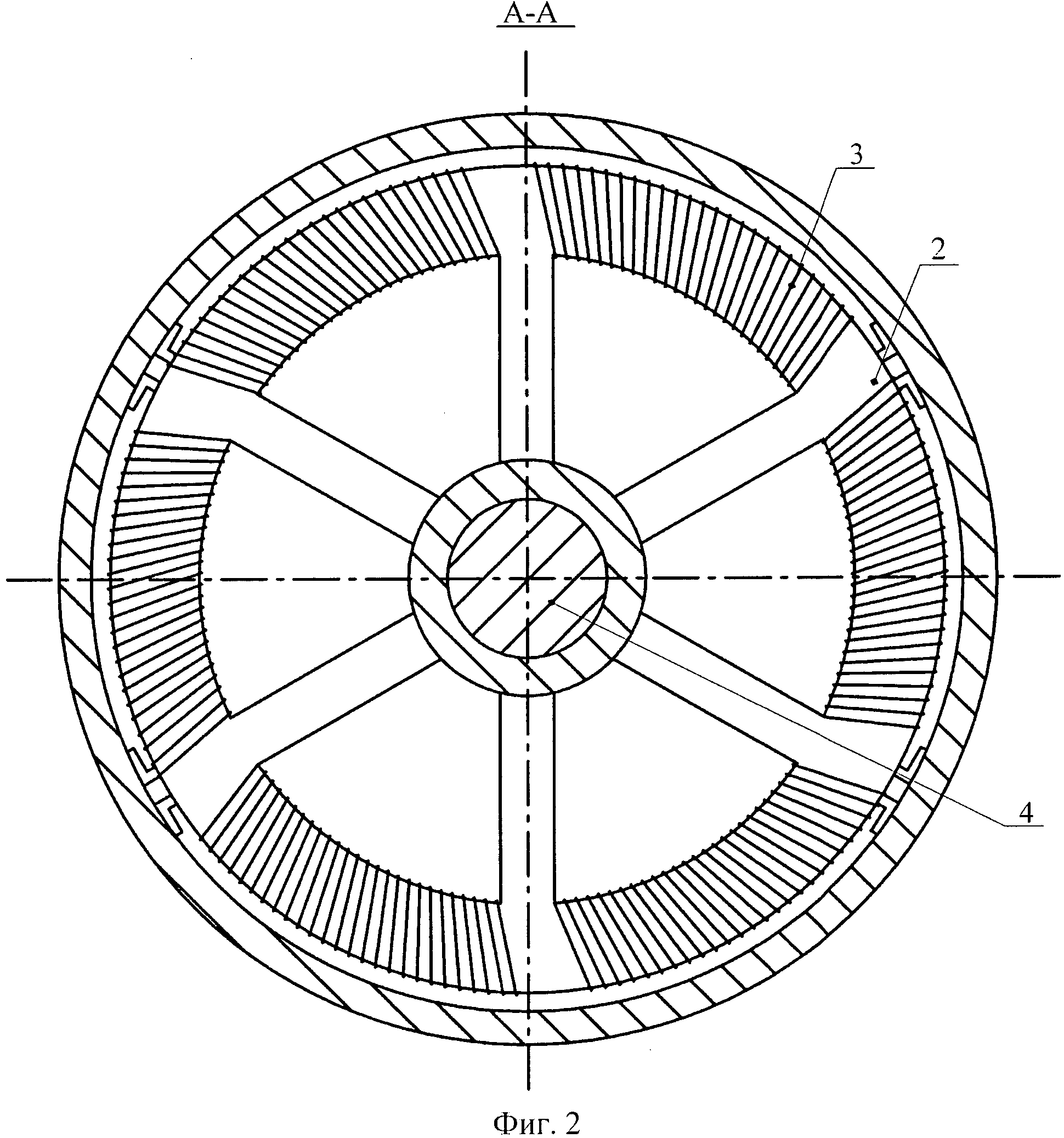 КПД двигателя с постоянными магнитами на мощности частотно-регулируемого привода. ACIM на синусоиде. Двигатели ACIM теряют 0,5–1,5 балла кпд при работе с частотно-регулируемым приводом.
КПД двигателя с постоянными магнитами на мощности частотно-регулируемого привода. ACIM на синусоиде. Двигатели ACIM теряют 0,5–1,5 балла кпд при работе с частотно-регулируемым приводом.
Важно отметить, что частотно-регулируемые приводы не повышают КПД двигателя; ЧРП помогают повысить эффективность системы в диапазонах рабочих скоростей, поскольку большинство систем не работают на максимальных скоростях все время.Добавление частотно-регулируемого привода помогает повысить эффективность вашей системы, поскольку он может замедлять двигатель и вентилятор или насос, а не поворачивать клапан для дросселирования насоса или закрывать заслонку для перекрытия потока воздуха.
Взгляните на рисунок 2, на котором сравнивается 10-сильный синхронный двигатель с постоянным магнитом 1800 об / мин и двигатель NEMA Premium, работающий с нагрузкой с переменным крутящим моментом в диапазоне скоростей от 3 до 1. Вы можете видеть, что в обоих случаях КПД обоих типов двигателей падает. КПД двигателя NEMA Premium Motor падает с 90% до 72% при 600 об / мин, а ECPM падает с 94% до 83%.Хотя работа системы влияет на эффективность оборудования, было доказано, что двигатели с постоянными магнитами демонстрируют более высокий КПД по сравнению с асинхронными двигателями переменного тока.
Рисунок 2 . Сравнение относительной эффективности двигателя PMSM и ACIM с диапазоном изменения 3: 1.
Преимущества и недостатки двигателей с постоянными магнитами
Хотя асинхронные двигатели переменного тока чаще встречаются в системах с моторным приводом, они часто больше по размеру и менее эффективны, чем двигатели с постоянными магнитами.Хотя решения с двигателями с постоянными магнитами обычно имеют более высокую начальную стоимость, они могут предлагать меньший размер для более компактных механических блоков и, что более важно, более высокую эффективность.
Двигатели с постоянными магнитами обычно дороже, чем асинхронные двигатели переменного тока, и, как известно, их сложнее запускать, чем асинхронные двигатели переменного тока. Однако преимущества двигателей с постоянными магнитами включают более высокий КПД (как обсуждалось выше), меньшие размеры (двигатели с постоянными магнитами могут составлять до одной трети от большинства размеров двигателей переменного тока, что значительно упрощает установку и обслуживание) и способность PMSM поддерживать полный крутящий момент на низких оборотах.
Тенденция меняется
Использование PMSM в сочетании с VFD не новость; однако инженеры-конструкторы и владельцы оборудования начинают устанавливать больше двигателей с постоянными магнитами для вентиляторов и насосов из-за их меньшего размера и большей эффективности. До этого момента частотно-регулируемые приводы требовали специальной формулы для привода двигателя с постоянными магнитами; Сейчас на рынке доступно несколько новых частотно-регулируемых приводов, которые имеют встроенную стандартную функцию для управления двигателями с постоянными магнитами без дополнительных затрат.
По мере того, как все больше производителей частотно-регулируемых приводов начинают добавлять функции для более эффективного управления модулями управления двигателем, владельцы и операторы приобретают тенденцию к установке систем двигателей, которые работают более эффективно, в меньших корпусах и с меньшими затратами.
Двигатели с постоянными магнитами с высокой мощностью и долговечностью
Двигатели постоянного тока с постоянными магнитами, обеспечивающие высокую мощность и долговечность
От ваших электродвигателей требуются те же условия, что и покупатели от ваших продуктов: рентабельность, эффективность и надежность.Nidec Motor Corporation гордится тем, что производит двигатели постоянного тока с постоянными магнитами, которые демонстрируют все три этих качества. Мы поставляем первоклассные двигатели с постоянным постоянным током различных известных производителей, идеально подходящие для применений, в которых требуется высокий крутящий момент, а также постоянный крутящий момент на различных скоростях. Наши опытные инженеры могут специально спроектировать двигатели в соответствии с вашими уникальными требованиями.
Марка HURST
Клиенты доверяют исключительным продуктам, производимым под маркой HURST®, с 1950 года, когда в Принстоне, штат Индиана, открылась семейная инструментальная мастерская.Эта репутация превосходного качества сохраняется на протяжении трех поколений семьи Херст. Теперь, как часть крупнейшего производителя электродвигателей в мире, бренд HURST продолжает поставлять надежные двигатели постоянного тока с постоянными магнитами и первоклассное обслуживание клиентов.
марка LEROY-SOMER
Марка LEROY-SOMER ™ создает высокопроизводительные и энергоэффективные двигатели в рамках всемирно известной Nidec Motor Corporation. Этот бренд радует покупателей с 1919 года, когда он был основан во Франции.Наши двигатели PMDC марки LEROY-SOMER, получившие признание во всем мире, обеспечивают точность процессов клиентов. Если вам нужны долговечность и эффективность, вам не нужно больше искать.
Марка MERKLE-KORFF
Наша торговая марка MERKLE-KORFF ™ начала производство качественных двигателей в 1911 году, начав с производства небольших двигателей и мотор-редукторов. Этот бренд известен созданием первого небольшого мотор-редуктора в 1920-х годах, а затем инновациями в простом двигателе с опусканием чашки, который сыграл решающую роль в автоматизации машин для производства безалкогольных напитков.Сегодня, под эгидой Nidec Motor Corporation, MERKLE-KORFF предлагает полный спектр надежных двигателей с постоянным постоянным током, которые отличаются исключительной стоимостью и долговечностью. Наши двигатели с постоянным током постоянного тока под этой торговой маркой известны тем, что выдерживают высокие требования, такие как приводы дверей, транспортировка материалов и системы обработки денег.
Марка США MOTORS
Двигатели маркиU.S. MOTORS® сходят с наших сборочных линий с 1908 года. Двигатели постоянного тока с постоянными магнитами этой марки идеально подходят для использования в таких приложениях, как нагнетатели, компрессоры, насосы, вентиляторы и оборудование с прямым подключением — среди многих других.Наши двигатели с постоянным постоянным током обеспечивают клиентов большой мощностью в небольшом корпусе, обеспечивая высокий уровень крутящего момента и поддерживая крутящий момент в диапазоне различных скоростей. Благодаря энергоэффективности и долговечности, вы можете положиться на наши двигатели, которые позволят вашим процессам работать как можно дольше.
Двигатель с постоянным магнитом
Двигатель с постоянным магнитомReuland создает двигатели с нуля … разрабатываем дизайн и изготавливаем прототип.
Мы очень стараемся производить продукцию высочайшего качества и соблюдайте график доставки. Каждый статор наматывается вручную для максимального гибкость, требуемая требованиями приложения.
Расчетные параметры постоянного магнита Reuland гибкость для удовлетворения любых требований к производительности, которые вы можете себе представить.
Ищите постоянный магнит в Reuland двигатели с непревзойденным коэффициентом мощности и КПД… с высокой плотностью мощности, где требуется для множества приложений; оборудование для производства синтетического волокна и стекла, линия передачи станков, волочение проволоки, упаковочные и складные машины и конвейер линейные приводы и медицинское оборудование и др.
Вот когда следует использовать синхронный постоянный магнит Двигатели: когда вам нужна синхронизация от процесса к процессу во время производства. Когда ты нужен точный контроль за скоростью процесса при производстве.Когда вам нужно всего контроль натяжения в производственных процессах.
Характеристики двигателяReuland с постоянными магнитами и Преимущества: точное регулирование скорости; высокий КПД и высокий коэффициент мощности … вы получаете столько же на 20% выше КПД по сравнению с обычными синхронными двигателями и на 30% более высокий коэффициент мощности, использующий меньший ток, чем у обычных синхронных двигателей.
Снижение операционных затрат … нет необходимости купить тахометры и регуляторы, необходимые Д.C. приводные системы при использовании Синхронные двигатели Reuland с постоянными магнитами. Стабильные магниты … максимальная энергия Reuland постоянные магниты плотности позволяют двигателю быть меньше и легче обычного синхронные двигатели … Магниты Reuland обладают высокой коэрцитивной силой, предотвращающей от размагничивания при повышенном напряжении.
Двигатели под заказ … специальные фланцы и валы доступны для удовлетворения ваших конкретных требований к двигателю.Двигатели, которые самоторможение … нет необходимости в постоянном токе для торможения постоянного магнита Reuland двигателей, так как торможение двигателя может быть выполнено путем простого замыкания проводов двигателя.
Конструктивные особенности: Постоянные серии Condor Варианты конструкции магнитного двигателя: чугун, алюминий, нержавеющая сталь, водяное охлаждение Доступны частичные двигатели (комплекты ротор / статор) Постоянный магнит Reuland’s Condor Series синхронные двигатели доступны в корпусах NEMA с 56 по 256 (опционально IEC) с 2 полюсами, 4 полюсная и 6-полюсная конфигурации.Доступна постоянная или регулируемая частота до 300 Гц с конструкциями до 600 вольт. Другие особенности конструкции: скорость до 18000 об / мин. Применение с постоянным крутящим моментом Изоляция класса F или H с повышением класса B Вот данные приложения, необходимые для расчета стоимости двигателя Reuland с постоянными магнитами: инерция нагрузки Время разгона Крутящий момент втягивания и отрыва Частота и диапазон скоростей Максимальное напряжение Скорость Тип источника питания Рабочий цикл Условия окружающей среды Корпус
Нажмите ЗДЕСЬ для брошюры в формате PDF
Магнитные материалы и сборки — отраслевая экспертиза
Решения для электрических машин PM
Разработка, улучшение, оптимизация, поставка, поддержка.
Eclipse Magnetics понимает потребности потребителей электрических машин, двигателей, приводов и исполнительных механизмов, чтобы разработать коммерчески жизнеспособные решения для машин с постоянным магнитом, которые имеют любой из вариантов: уменьшенный вес, более высокую удельную мощность, компактную конструкцию, более длительный срок службы, сниженную стоимость или более высокую эффективность. Это даже включает альтернативы дизайна без редкоземельных элементов. Мы можем помочь в сокращении углеродного следа, сокращении спроса на электроэнергию (EDR) и сокращении выбросов CO2.
Независимо от того, разрабатывает ли приложение редкоземельные магниты для замены феррита, увеличения плотности мощности, миниатюризации, повышения эффективности, повышения концентрации магнитного потока на полюсах, использования внешних или внутренних роторов, температурной компенсации, использования порошкового железа, уменьшения вихревых токов, крутящего момента Для уменьшения пульсаций или снижения энергопотребления Eclipse Magnetics поможет вам найти решение.Мы даже можем магнитно сбалансировать ротор, чтобы выровнять противо-ЭДС в каждой фазе, чтобы упростить силовую электронику.
Нам нравится использовать взаимное соглашение о неразглашении. Мы можем помочь вам спроектировать противоэдс, крутящий момент, напряженность поля, определение положения, снижение веса, миниатюризацию, повышение эффективности, снижение затрат и даже замену редкоземельных элементов.
У нас есть доктор Эван Гудье, инженер по электронике и электротехнике, имеющий докторскую степень в области конструкции двигателей, в которых используются магниты, для оказания помощи в разработке вашего магнитного приложения и технической поддержки.
Наше совместное предприятие в Китае также позволяет нам поставлять наши решения с PPAP и C of C.
Мы даже предлагаем методы, обеспечивающие лучшую переработку, чтобы соответствовать требованиям WEEE.
Обладая непревзойденным опытом в разработке магнитных решений с добавленной стоимостью, Eclipse Magnetics является надежным партнером в области надежных долгосрочных контрактных производственных поставок.