|
||||||
www.progressavtomatica.ru
Главная Информация Основные языки программирования контроллеров PLCОсновные языки программирования контроллеров PLC
Главная задача ПЛК – это выполнение прикладной программы управления технологическим процессом. Очевидно, что незапрограммированный контроллер – это всего лишь пустая железяка, не приносящая никакой пользы человечеству.
Какие программы может выполнять промышленный контроллер? Ответ прост: практически любые. Современный контроллер свободно программируем, т.е. предоставляет разработчику возможность создавать пользовательские программы произвольной структуры без ограничений их функциональности, будь то программа управления пастеризатором на молочном комбинате или управление колонной ректификации на НПЗ. По сути, единственным ограничением здесь может быть объем свободных ресурсов контроллера.
Что нужно, чтобы запрограммировать ПЛК? Грамотный специалист. Во-вторых, персональный компьютер или портативный программатор, подключенный к контроллеру по сети. В-третьих, программный пакет разработки, поставляемый, как правило, за дополнительную плату. Иногда среда разработки входит в состав комплексного ПО для инсталляции и эксплуатации всей системы управления.
Современные средства разработки чрезвычайно функциональны и предлагают разработчику множество возможностей:
1. Разнообразные программные библиотеки, функциональные блоки, готовые процедуры и шаблоны. Использование предподготовленных компонентов сильно ускоряет процесс разработки программного обеспечения для ПЛК.
2. Инструменты для отладки, тестирования и симуляции прикладной программы. Последние позволяют выполнять программу ПЛК на персональном компьютере без загрузки в реальный контроллер.
3. Инструменты для автоматизированного документирования разработанной программы в соответствие с принятыми стандартами.
Но у программиста есть и более мощный инструмент. Дело в том, что современные средства разработки прикладного ПО для промышленных контроллеров, как правило, поддерживают до шести разных языков программирования.
Существует международный стандарт IEC 61131, разработанный Международной Электротехнической Комиссией (МЭК, IEC) и состоящий из восьми частей. Наиболее интересной является третья часть, IEC 61131-3, описывающая языки программирования ПЛК. Первоначальной целью стандарта IEC 61131-3 была унификация языков программирования ПЛК и предоставление разработчикам ряда аппаратно-независимых языков, что, по замыслу создателей стандарта, обеспечило бы простую переносимость программ между различными аппаратными платформами и снимало бы необходимость изучения новых языков и средств программирования при переходе разработчика на новый ПЛК.
К сожалению, цели в полном объеме достигнуты не были. Каждый производитель ПЛК сопровождает свой продукт собственной средой программирования, которая, как правило, не совместима с другими, да и о кросс-платформенности программного кода можно забыть. Тем не менее, в части описания языков программирования стандарт IEC 61131 остается чрезвычайно актуальным и является ориентиром для большинства разработчиков ПЛК.
Какие языки используются для программирования промышленных контроллеров? Ниже приведен краткий обзор языков стандарта.
Язык LD
Язык LD (LAD, Ladder) является графическим языком разработки, программа на котором представляет собой аналог релейной схемы. Пример программы на данном языке приведен на рис. 1. По идеи авторов стандарта, такая форма представления программы облегчит переход инженеров из области релейной автоматики на ПЛК.
К недостаткам данного языка можно отнести то, что по мере увеличения количества «реле» в схеме она становится сложнее для интерпретации, анализа и откладки. Еще один недостаток языка LD заключается в следующем: язык, построенный по аналогии с релейными схемами, может быть эффективно использован только для описания процессов, имеющих дискретный (двоичный) характер; для обработки «непрерывных» процессов (с множеством аналоговых переменных) такой подход теряет смысл.
Рис. 1. Язык релейных диаграмм LD.
Язык FBD
Язык FBD (Functional Block Diagram, Диаграмма Функциональных Блоков) является языком графического программирования, так же, как и LD, использующий аналогию с электрической (электронной) схемой. Программа на языке FBD представляет собой совокупность функциональных блоков (functional flocks, FBs), входа и выхода которых соединены линиями связи (connections). Эти связи, соединяющие выхода одних блоков с входами других, являются по сути дела переменными программы и служат для пересылки данных между блоками. Каждый блок представляет собой математическую операцию (сложение, умножение, триггер, логическое “или” и т.д.) и может иметь, в общем случае, произвольное количество входов и выходов. Начальные значения переменных задаются с помощью специальных блоков – входов или констант, выходные цепи могут быть связаны либо с физическими выходами контроллера, либо с глобальными переменными программы. Пример фрагмента программы на языке FBD приведен на рис. 2.
Практика показывает, что FBD является наиболее распространенным языком стандарта IEC. Графическая форма представления алгоритма, простота в использовании, повторное использование функциональных диаграмм и библиотеки функциональных блоков делают язык FBD незаменимым при разработке программного обеспечения ПЛК. Вместе с тем, нельзя не заметить и некоторые недостатки FBD. Хотя FBD обеспечивает легкое представление функций обработки как «непрерывных» сигналов, в частности, функций регулирования, так и логических функций, в нем неудобным и неочевидным образом реализуются те участки программы, которые было бы удобно представить в виде конечного автомата.
Рис.2. Функциональная схема FBD.
Язык SFC
Язык последовательных функциональных схем SFC (Sequential Function Chart), использующийся совместно с другими языками (обычно с ST и IL), является графическим языком, в котором программа описывается в виде схематической последовательности шагов, объединенных переходами. Язык SFC построен по принципу, близкому к концепции конечного автомата, что делает его одним из самых мощных языков программирования стандарта IEC 61131-3. Пример программы на языке SFC приведен на рис. 3.
Наиболее простым и естественным образом на языке SFC описываются технологические процессы, состоящие из последовательно выполняемых шагов, с возможностью описания нескольких параллельно выполняющихся процессов, для чего в языке имеются специальные символы разветвления и слияния потоков (дивергенции и конвергенции, в терминах стандарта IEC 61131-3).
Шаги последовательности располагаются вертикально сверху вниз. На каждом шаге выполняется определенный перечень действий (операций). При этом для описания самой операции используются другие языки программирования, такие как IL или ST.
Действия (операции) в шагах имеют специальные классификаторы, определяющие способ их выполнения внутри шага: циклическое выполнение, однократное выполнение, однократное выполнение при входе в шаг и т.д. В сумме таких классификаторов насчитывается девять, причем среди них есть, например, классификаторы так называемых сохраняемых и отложенных действий, заставляющие действие выполняться даже после выхода программы из шага.
После того, как шаг выполнен, управление передается следующему за ним шагу. Переход между шагами может быть условным и безусловным. Условный переход требует выполнение определенного логического условия для передачи управления на следующий шаг; пока это условие не выполнено программа будет оставаться внутри текущего шага, даже если все операции внутри шага уже выполнены. Безусловный переход происходит всегда после полного выполнения всех операций на данном шаге. С помощью переходов можно осуществлять разделение и слияние ветвей последовательности, организовать параллельную обработку нескольких ветвей или заставить одну выполненную ветвь ждать завершения другой.
Как и любому другому языку, SFC свойственны некоторые недостатки. Хотя SFC может быть использован для моделирования конечных автоматов, его программная модель не совсем удобна для этого. Это связано с тем, что текущее состояние программы определяется не переменной состояния, а набором флагов активности каждого шага, в связи с чем при недостаточном контроле со стороны программиста могут оказаться одновременно активными несколько шагов, не находящихся в параллельных потоках.
Еще одно неудобство языка связано с тем, что шаги графически располагаются сверху вниз, и переход, идущий в обратном направлении, изображается в неявной форме, в виде стрелки с номером состояния, в которое осуществляется переход.
Рис. 3. Язык последовательных функциональных схем SFC.
Язык ST
Язык ST (Structured Text, Структурированный Текст) представляет собой язык высокого уровня, имеющий черты языков Pascal и Basic. Данный язык имеет те же недостатки, что и IL, однако они выражены в меньшей степени. Пример программы на языке ST приведен на рис. 4.
С помощью ST можно легко реализовывать арифметические и логические операции (в том числе, побитовые), безусловные и условные переходы, циклические вычисления; возможно использование как библиотечных, так и пользовательских функций. Язык также интерпретирует более 16 типов данных.
Язык ST может быть освоен технологом за короткий срок, однако текстовая форма представления программ служит сдерживающим фактором при разработке сложных систем, так как не дает наглядного представления ни о структуре программы, ни о происходящих в ней процессах.
Рис. 4. Язык структурированного текста ST.
Язык IL
Язык IL (Instruction List, Список Команд) представляет собой ассемблероподобный язык, достаточно несложный по замыслу авторов стандарта, для его практического применения в задачах промышленной автоматизации пользователем, не имеющим, с одной стороны, профессиональной подготовки в области программирования, с другой стороны, являющимся специалистом в той или иной области производства. Однако, как показывает практика, такой подход себя не оправдывает.
Ввиду своей ненаглядности, IL практически не используется для программирования комплексных алгоритмов автоматизированного управления, но часто применяется для кодирования отдельных функциональных блоков, из которых впоследствии складываются схемы FBD или CFC. При этом IL позволяет достичь высокой оптимальности кода: программные блоки, написанные на IL, имеют высокую скорость исполнения и наименее требовательны к ресурсам контроллера.
Язык IL имеет все недостатки, которые присущи другим низкоуровневым языкам программирования: сложность и высокую трудоемкость программирования, трудность модификации написанных на нем программ, малую степень «видимого» соответствия исходного текста программы и решаемой задачи.
Пример программы на языке IL приведен на рис. 5.
Рис. 5. Язык инструкций IL.
Многие производители инструментальных средств, опирающиеся на стандарт IEC, не ограничиваются поддержкой рассмотренных выше пяти языков стандарта. Можно выделить, как минимум, еще один язык визуального программирования, который довольно популярен среди разработчиков.
Язык CFC
Язык CFC (Continuous Flow Chart) – еще один высокоуровневый язык визуального программирования. По сути, CFC – это дальнейшее развития языка FBD. Этот язык был специально создан для проектирования систем управления непрерывными технологическими процессами.
Проектирование сводится к выбору из библиотек готовых функциональных блоков, их позиционированию на экране, установке соединений между их входами и выходами, а также настройке параметров выбранных блоков. В отличие от FBD, функциональные блоки языка CFC выполняют не только простые математические операции, а ориентированы на управление целыми технологическими единицами. Так в типовой библиотеке CFC блоков находятся комплексные функциональные блоки, реализующие управление клапанами, моторами, насосами; блоки, генерирующие аварийные сигнализации; блоки PID-регулирования и т.д. Вместе с тем доступны и стандартные блоки FBD. Унаследовав от FBD саму концепцию программирования, язык CFC в наибольшей степени ориентирован на сам технологический процесс, позволяя разработчику абстрагироваться от сложного математического аппарата.
Рис. 6. Среда проектирования на языке CFC системы Simatic PCS7.
CFC прост в освоении, и при этом позволяет разрабатывать сложнейшие алгоритмы автоматизированного управления без каких-либо специфических знаний других языков программирования.
Казанцев Андрей
Наверх
www.promserv.ru
Описание устройства и принципа работы контроллера серии alpha-mitsubishi Область применения и возможности контроллеров Alpha
Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Северный (Арктический) федеральный университет имени М.В. Ломоносова» | |||||||||||||||||||||||
Кафедра автоматизации технологических процессов и производств | |||||||||||||||||||||||
(наименование кафедры) | |||||||||||||||||||||||
(фамилия, имя, отчество студента) | |||||||||||||||||||||||
Институт | ИЭиТ | курс | группа | ||||||||||||||||||||
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА | |||||||||||||||||||||||
По дисциплине | Информационно-измерительная | ||||||||||||||||||||||
техника и электроника | |||||||||||||||||||||||
На тему | Программирование контроллера | ||||||||||||||||||||||
(наименование темы) | |||||||||||||||||||||||
Alpha-Mitsubishi на работу с испытательным макетом | |||||||||||||||||||||||
сортировочного деревообрабатывающего конвейера | |||||||||||||||||||||||
Отметка о зачёте | |||||||||||||||||||||||
(дата) | |||||||||||||||||||||||
Руководитель | к.т.н., доцент | Захаров М.В. | |||||||||||||||||||||
(должность) | (подпись) | (и.,о., фамилия) | |||||||||||||||||||||
(дата) | |||||||||||||||||||||||
Архангельск | |||||||||||||||||||||||
2012 | |||||||||||||||||||||||
ЛИСТ ЗАМЕЧАНИЙ
Новый класс Alpha закрывает пробел между лишенными интеллекта дискретными компонентами и традиционными программируемыми контроллерами. Долгое время в области оборудования для промышленной автоматизации существовал пробел в области средств автоматического управления для несложных задач, требующих, тем не менее, программного управления. С одной стороны в системах автоматики всегда можно использовать дискретные компоненты, такие как реле времени, счетчики, промежуточные реле, с другой стороны — компактные миниатюрные программируемые логические контроллеры. Однако дискретные элементы часто не способны реализовать более ли менее сложную задачу, в то время как традиционные программируемые контроллеры для таких задач могут быть избыточными.
Применение контроллеров Alpha является оптимальным решением для несложных задач самых различных отраслей промышленности, способным без труда решать задачи счета, реализовывать временные задержки, логически операции и даже обработку аналоговых сигналов. Контроллеры могут управлять упаковочными машинами, конвейерами, гидро-, пневмораспределителями и множеством других механизмов.
Программное обеспечение AL-PCS/WIN – это удобный пакет для программирования с простым и понятным интерфейсом. Контроллеры Alpha могут программироваться как с собственного встроенного пульта, так и с помощью программного обеспечения, устанавливаемого на обычном персональном компьютере, работающем в среде Windows. При этом не требуется никаких специальных знаний или навыков. Программа-отладчик позволяет отображать в графическом виде программу (в форме мнемосхемы) и выполнять отладку программы без реального подключения входов/выходов. Другой очень удобной чертой является возможность создавать собственные функции, содержимое которых определяется пользователем. Таких блоков может быть до тридцати. Всего же программа может содержать до 64 функциональных блоков (программных модулей). Каждый модуль выполняет конкретные функции, использует определенное число входов и/или выходов и может использоваться сколь угодно часто. Еще одной отличительной особенностью контроллеров Alpha является то, что входы в контроллере по сути – гибридные, т.е. каждый отдельный вход может быть либо дискретным либо аналоговым.
Простые текстовые сообщения, значения функциональных блоков и редактируемые установки могут отображаться на экране контроллера. Имеются встроенные календарные часы и часы реального времени, кроме того, система поддерживает функцию энергонезависимого счета часов. Действие этой функции аналогично, работе таймера в видеомагнитофоне: настраивается время включения (дата, день недели, часы, минуты) и время отключения с аналогичными параметрами. При совпадении условия выход контроллера активизируется до времени ограниченного параметрами отключения. Таких таймеров с различными временными параметрами может быть установлено несколько.
studfile.net
Контроллер al2 — 10 mr
Этот контроллер имеет 6 дискретных входов и 4 релейных выходов.
Схема подключения входных сигналов
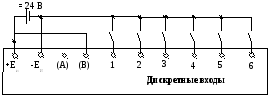
На выходе имеются четыре релейных выхода. Через контакты реле может проходить ток до 8 А при источнике напряжения +24 В или ~220 В.
Для подсоединения кабелей управления используйте провод сечением 0,13 ÷ 3,31 мм2.
Схема подключения выходных сигналов.

Программирование α – контроллера
Контроллер программируется на языке FBD. При этом пользователь может программировать контроллер двумя способами:
— с использованием кнопок панели и встроенного дисплея контроллера;
— составить программу на компьютере в среде AL—PCS/WIN под Windows и пересылать программу в контроллер через COM- порт.
Программирование контроллера в среде AL—PCS/WIN
Программирование контроллера в этой среде наиболее удобно. Для работы с этой программой его следует инсталлировать на вашем компьютере.
Программа запускается через кнопку Пуск. После запуска появляется стандартное окно Windows-приложения. Для создания новой программы для контроллера выполним команду Файл/ Новый. При этом система запрашивает серию контроллера и количество входов и выходов.
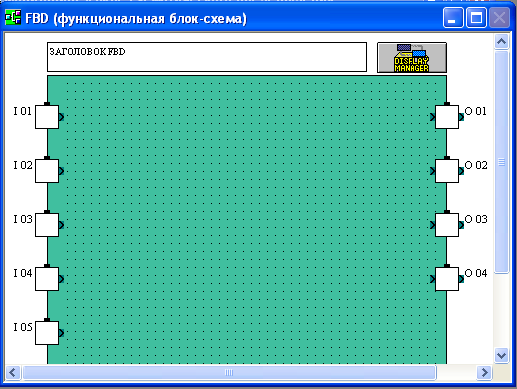
Для нашего случая подходит серия AL2 и 6 входов и 4 выхода. Установите соответствующие флажки и нажмите на кнопку ОК. При этом появляется окно, где составляется программа:
Р ядом
с этим окном появляется меню функциональных
блоков. Как видно, это меню организовано
как многостраничное окно. Назначение
страниц этого окно следующее:
ядом
с этим окном появляется меню функциональных
блоков. Как видно, это меню организовано
как многостраничное окно. Назначение
страниц этого окно следующее:
IN и OUT — входные и выходные сигналы
FUNC – функциональные блоки
LOGIC — логические блоки
USER – пользовательские блоки.
Составление программы сводится к размещению функциональных блоков на окне и их взаимному соединению. Все это напоминает составление структурной схемы или соединение микросхем на электрической схеме.
После размещения блока, если дважды щелкнуть на нем появляется окно свойств блока. Окно свойств блока содержит разные поля для ввода параметров блока. Например, для блока Delay в окне свойств задается время задержки сигнала.
Эта программа также имеет удобную подсказку (Help). Если при выделенном блоке нажать клавишу F1, то появляется окно, где приведено описание блока на русском языке. Использую такую подсказку легко изучить разных блоков и применить их в своей программе.
Описание функциональных блоков
Блок Boolean – Логическая функция
Блок имеет до четырех входов и один выход. Состояние выхода определяется логической функцией, которая задается в окне свойств. Аргументами логической функции являются входные сигналы блока, которые обозначаются как I01 … I04.
Блок Set / Reset.
Блок имеет два входа (Set и Reset) и один выход. Он действует как RS – триггер. Таблица истинности этого блока совпадает с таблицей истинности RS – триггера за исключением состояния, когда R=S=1. В этом случае состояние выхода определяется внутренним параметром Приоритет.
Значение этого параметра определяется двумя переключателями:
Установить приоритет, т.е. когда R=S=1, на выходе Q=1.
Сбросить приоритет, т.е. когда R=S=1, на выходе Q=0.
studfile.net
Языки программирования плк (plc) — Asutpp

Контролер – это управляющее устройство. Действительно функциональным он становится только тогда, когда вы создаете и запускаете программу по его использованию.
Отсюда вытекает главная задача программируемого логического контролера – исполнение программы, которая осуществляет руководство технологического процесса.
Какой набор программ доступен для ПЛК? В принципе любой набор возможен. Главное, чтобы размер свободных ресурсов, данного инструмента, вам был не помехой. Разработчик получает широкие возможности по написанию программ.
Что же необходимо, чтобы осуществить программирование контроллера? Во – первых нужен программист, который бы досконально разбирался в данном вопросе. Во – вторых необходим сам компьютер и конечно пакет разработки.
Функционал средств разработки
Обычно пакет разработки поставляется за дополнительную плату. Хотя в принципе часто встречается, что данный пакет уже изначально включен в программное обеспечение по инсталляции.
Какой функционал предлагает среда разработки?
- Большой набор библиотек, программные блоки, определенные процедуры и готовые шаблоны.
- Инструментарий для проверки, тестированию и запуску программы на компьютере минуя контроллер.
- Также предложен инструмент для автоматизации документирования программы, которая была создана, в пределах принятых стандартов.
И наконец необходимо отметить главное достоинство – это поддержка порядка шести языков программирования. Единственным недостатком является то, что совместимость программ реализована на низком уровне. Производители ПЛК не пришли к унификации и каждый выпускает, данное устройство, со своей программной средой.
Виды языков программирования для ПЛК
LD (Ladder) – это среда разработки, которая основана на графике. Своего рода, она представляет собой подобие релейной схемы. Разработчики данного стандарта считают, что использование такого вида программной среды существенно облегчает переобучение инженеров релейной автоматики на ПЛК.
К главным недостаткам, данного языка программирования, можно отнести неэффективность при обработке процессов с большим количеством аналоговых переменных, так как он построен для представления процессов с дискретным характером.
FBD ( Диаграмма Функциональных Блоков) – здесь также используется графическое программирование. Образно говоря, FBD определяет собой некую множественность функциональных блоков, которые имеют соединения между собой (вход и выход).
Данные связи являются переменными и выполняют пересылку между блоками. Каждый блок в отдельности может представлять определенную операцию( триггер, логическое “или” и т.д.). Переменные задаются с помощью определенных блоков, а цепи выхода могут иметь связи с конкретными выходами контроллера или связи с глобальными переменными.
SFC ( Sequential Function Chart) – может использоваться с языками ST и IL, он также основан на графике. Принцип его построения близок к образу конечного автомата, данное условие относит его к самым мощным языкам программирования.
Технологические процессы, в данном языке, построены по типу определенных шагов. Структура шагов состоит из вертикали, которая идет сверху вниз. Каждый шаг – это конкретные операции. Описать операцию можно не только с помощью SFC, но и с помощью ST и IL.
Как только шаг выполнен, то идет действие по передачи управления следующему шагу. Переход между шагами может быть двух видов. Если на шаге выполнено какое – то условие и дальнейшим действием является переход на следующий шаг, значит – это условный переход. В случае же, если происходит полное выполнение всех условий на данном шаге и только потом осуществляется переход на следующий шаг, то-это безусловный переход.
Недостатком SFC можно считать, что в процессе работы может быть активировано несколько шагов, не в параллельных потоках. Поэтому необходим глобальный контроль со стороны программиста.
ST ( Структурированный Текст) – относится к языкам высокого уровня и имеет много сходного с Pascal и Basic.
ST позволяет интерпретировать более шестнадцати типов данных и имеет возможность работать с логическими операциями, циклическими вычислениями и т.д.
Небольшим недостатком можно определить отсутствие графической среды. Программы представлены в виде текста и данное условие усложняет освоение технологии.
IL ( Список Команд) – язык подобен Ассемблеру, обычно используется для кодировки блоков по отдельности. Плюсом является то, что данные блоки имеют большую скорость работы и низкую требовательность к ресурсам.
CFC ( Continuous Flow Chart) – относится к языкам высокого уровня. В принципе – это явное продолжение языка FBD.
Процесс проектирования состоит из использования готовых блоков и размещения их на экране. Далее происходит их настройка и размещения соединений между ними.
Каждый блок – это управление определенным технологическим процессом. Здесь идет основной уклон на технологический процесс, математика уходит на второй план.
www.asutpp.ru
Альфа (система программирования)
2010/05/19 12:38:00
Альфа — оптимизирующая система программирования, во многом определившая современную методологию оптимизирующей трансляции. Система «Альфа» была первой в мировой практике оптимизирующей системой программирования для языков, более сложных, чем Фортран. Создана под руководством советского ученого Андрея Ершова.
Разработка системы
Разработка системы «Альфа» началась с создания языка — это было характерно для традиций программирующих программ. Язык этот отталкивается от первоначальной версии Алгола 60 — так называемого Алгола 58. Группа, руководимая Ершовым, вела разработку параллельно с международной группой, разрабатывающей Алгол 60. Во многом работы указанных групп оказались совпадающими, и поэтому после опубликования описания Алгола 60 новый, созданный группой Ершова язык был сформулирован как расширение Алгола 60. Этот язык, носивший предварительные названия «Входной», «Сибирский», окончательно утвердился под названием Альфа-язык.
В Альфа-языке впервые введено понятие многомерных значений и определены операции над ними, в том числе операции конструирования. Все это вошло в стандартный багаж понятий современных языков, таких как ПЛ/1, Алгол 68, Ада. Впервые были введены и такие, естественные для современных языков концепции, как разнообразие циклов, задание начальных значений выражениями. Интересными, но, по существу, не повторенными свойствами языка были перечисления и верхние (временные) индексы. В своих метасредствах язык впервые выходил за пределы контекстно-свободных грамматик.
Система «Альфа» была первой в мировой практике оптимизирующей системой программирования для языков, более сложных, чем Фортран. Существовавший в то же время английский проект (Хоукинс и Хакстейбл) для Алгола 60, аналогичный «Альфе» по функциональным возможностям, так и не был доведен до конца. Это важно отметить потому, что сама возможность существования трансляторов для языков, более сложных, чем Фортран, с приемлемой эффективностью объектных программ в то время многими оспаривалась. Система «Альфа» стала конструктивным доказательством такой возможности, и это существенно, ибо снимало преграды на пути создания новых, семантически более богатых языков. Первоначальное ротапринтное издание по системе появилось в 1964 году.
Научное значение работы
Работы по системе «Альфа» внесли крупный вклад в методологию оптимизирующей трансляции. Была предложена и реализована многопроходная схема трансляции, ориентированная на оптимизацию, впервые введены в практику оптимизации программ оптимизирующие преобразования промежуточного представления программы, выделены и построены промежуточные представления программы, ориентированные на алгоритмы оптимизации.
Реализованные в системе «Альфа» методы экономии памяти, разработанные Ершовым, представляют собой теоретический и практический фундамент последующих работ по экономии памяти. Позже Ершовым было введено понятие информационного графа программы как модели, пригодной для определения такого преобразования, как глобальная экономия памяти, задача экономии памяти была сведена к известной задаче раскраски графа, вместе с Г. И. Кожухиным были заложены основы эвристического алгоритма близкой к оптимальной раскраски графа. Ершовым были даны основы полной теории экономии памяти. Эти труды определили не только работы по экономии памяти, но и другие исследования по оптимизации программ, в частности дали хороший пример построения практичных теоретических моделей для оптимизации программ.
Дальнейшие работы Ершова по оптимизирующей трансляции привели к появлению широко известной и используемой до сих пор системы «Альфа-6».
www.tadviser.ru
Изучить устройство и принцип программирования микроконтроллёра, используя «Руководство по программ-ному обеспечению».
Изучить указания по работе с измерительной систе-мой стенда, используя соответствующую Инструкцию.
В отчёте кратко пояснить принципы использования мик-роконтроллёра при изучении пневмосхем.
Контрольные вопросы.
1. Пояснить, чем занимается «пневмоавтоматика».
2. Назвать основные составляющие пневмосхемы.
3.Пояснить, чем золотниковые пневмораспределители отлича-ются от золотниковых гидрораспределителей?
4. Назовите назначение программируемых микроконтроллёров.
5. Какую роль программируемые микроконтроллёры играют в пневмоавтоматике.
Лабораторная работа 10. Составление программ для прог-раммируемого логического контроллера (ПЛК) Mitsubishi Electric ALPHA-2 с помощью среды программирования AL-PCS/WIN-EU на компьютере. Запись программ в память ПЛК
Цель работы:
— инсталляция и изучение возможностей среды программиро-вания и обмена данными с ПЛК ALPHA-2;
— запись программы в память ПЛК, запуск выполнения;
— получение навыков создания программ в среде программиро-вания Mitsubishi Alpha Programming.
Выполнение работы.
1) Запустить программу Mitsubishi Alpha Programming.
2) Открыть имеющийся проект или пример программы (см. рисунок 10.2) для ПЛК Alpha-2 в Mitsubishi Alpha Programming.
3)Убедиться, что на панели стенда тумблер SA1 выключен, тумблер SA2 в среднем положении, при необходимости установить их в указанное положение.

Рисунок 10.1 – Панель инструментов интерфейса программы Mitsubishi Alpha Programming
4) Включить питание стенда (три автоматических выключателя «Сеть»). Запустить моделирование (симуляцию). В окне прог-раммы, изменяя состояние входных каналов (1…8 в зависимости от конкретной программы) зафиксировать смену состояний вы-ходов (out 001…006). См.рис.10.3.

Рисунок10.2. Область программирования
5) Произвести остановку («СТОП») контроллера.
6) Записать программу в ПЛК. Запустить контроллер и включить мониторинг.
7) Включить тумблер SA1.
8) Нажать кратковременно кнопку SB1. Проследить за реакцией схемы.
9.)Нажать и удерживать поочередно кнопки SB1, SB2. Проследить за реакцией схемы.
10) Установить тумблер SA2 сначала в левое положение, затем в правое. Проследить за реакцией схемы.
11) Выключить тумблер SA1, тумблер SA2 установить в среднее положение.
12) Произвести остановку («СТОП») контроллера.
13) Выключить питание (три автоматических выключателя «Сеть»).
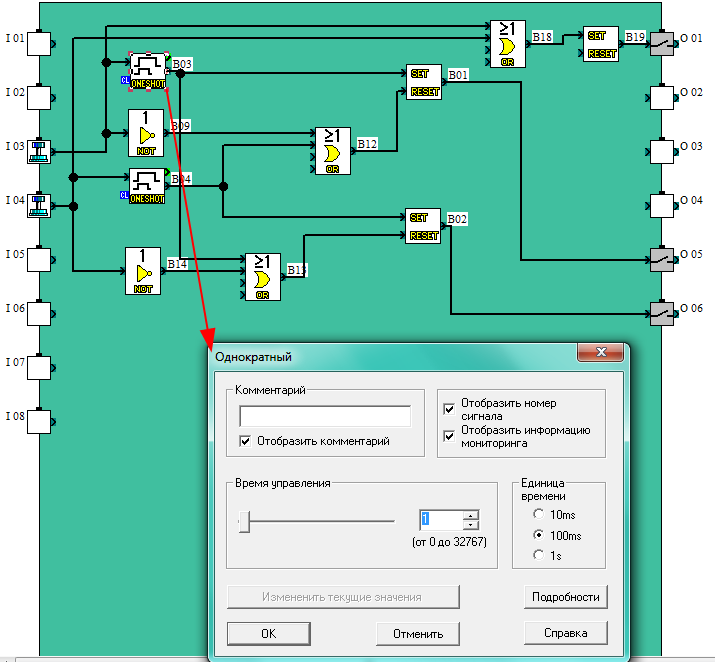
Рисунок 10.3. Изменение параметров программы
Внесение изменений в программу ПЛК, ввод команд
А) Запустить приложение Mitsubishi Alpha Programming на компьютере.
Б) Открыть имеющийся проект или пример программы для ПЛК Alpha-2 в Mitsubishi Alpha Programming.
В)Убедиться, что на панели стенда тумблер SA1 выключен, тумблер SA2 в среднем положении, при необходимости установить их в указанное положение.
Г) Включить питание стенда (три автоматических выключателя «Сеть»).
Д) Записать программу в ПЛК (программа изображена на рисунке 9.13). Запустить моделирование и мониторинг.
Е) В окне программы, изменяя состояние входных каналов (1…8 в зависимости от конкретной программы) зафиксировать смену состояний выходов (out 001…006).
Ж) Изучить возможности смены параметров блоков программы (для открытия свойств нужно навести указатель мыши на блок и произвести двойное нажатие ЛКМ). Произвести в программе изменения согласно рис.10.3.
З)Записать программу в ПЛК. Запустить контроллер и включить мониторинг.
И) Включить тумблер SA1.
К) Нажать кнопку SB3. Проследить за реакцией схемы.
Л) Нажать и удерживать поочередно кнопки SB3, SB4. Проследить за реакцией схемы (рис. 10.4-10.6).
М) Выключить тумблер SA1. Произвести остановку («СТОП») контроллера.
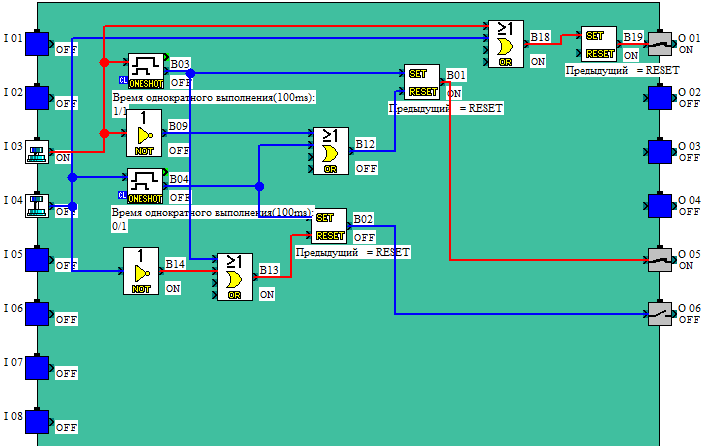
Рисунок 10.4. Реакция ПЛК на изменение состояния входа in3
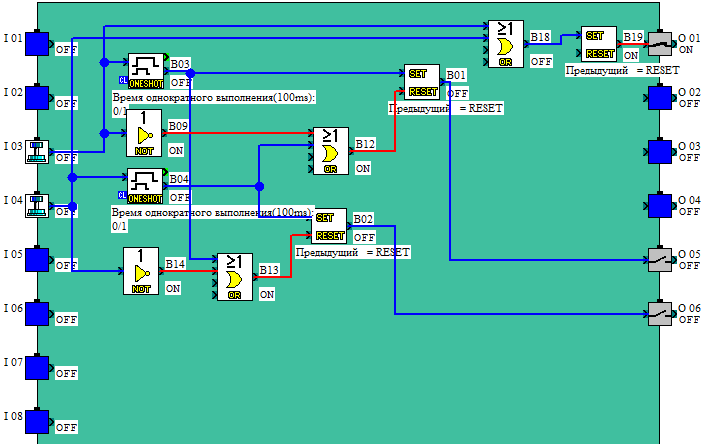
Рисунок 10.5. Реакция ПЛК на изменение состояния входа in3
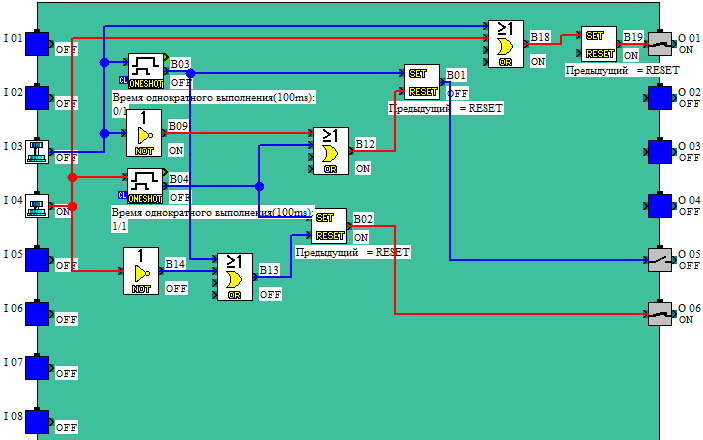
Рисунок10.6.Реакция ПЛК на изменение состояния входа in4
Выводы.
Контрольные вопросы.
1.Каково назначение микроконтроллёра в исследовании пнев-мосхем?
2. Каким образом можно запустить программу-пример с целью изучения работы микроконтроллёра?
3.Каким образом можно создать новую программу для микро-контроллёра?
4. Каким образом можно проверить созданную программу?
5. Сколько входов и выходов можно использовать при создании програм для данного микроконтроллёра?
Лабораторная работа 11. Программирование ПЛК на примере простейшего алгоритма движения штока цилиндра
Цель работы:
— отработка навыков создания программ для ПЛК;
— разработка программного обеспечения;
— контроль выполнения программы.
Выполнение работы.
1. Изучить руководства по программной и аппаратной части ПЛК Alpha-2. Ознакомится с составом оборудования ПЛК.
2. Проверить подключение компрессора к электросети и, если требуется, подключить.
3. Соединить компрессор и вводной фитинг фильтра на панели стенда пневмотрубкой.
4.Закрыть выходной вентиль компрессора, регулятор компрессора максимально открыть.
5. Включить питание стенда (три автоматических выключателя «Сеть»).
6. Перевести рычаг управления компрессором в положение «Включено».
7. Дождаться пока давление в ресивере достигнет максимального рабочего значения и компрессор отключиться.
8.Запустить приложение Mitsubishi Alpha Programming на компьютере.
9. Создать новый проект в Mitsubishi Alpha Programming.
10. Убедиться, что на панели стенда тумблер SA1 выключен, тумблер SA2 в среднем положении, при необходимости установить их в указанное положение.
11. Включить питание стенда (три автоматических выключателя «Сеть»). 12. Регуляторы Ф, КР на панели стенда максимально открыть. Регулятор дросселя ДР5 установить в положение 3, дроссели ДР1, ДР2 отрегулировать на 0,5…1.
13. Программа должна выполнять следующие функции:
а) при нажатии кнопки SB1 шток цилиндра Ц1 должен двигаться вверх, пока нажата SB1 (вместо SB1 можно использовать SA2).
б) при нажатии кнопки SB2 шток цилиндра Ц1 должен двигаться вниз, пока нажата SB2 (вместо SB2 можно использовать SA2).
14. Опираясь на описание в пункте 14 создайте программу, которая удовлетворяет поставленной задаче (см. лаб.раб. 10).
15. Записать программу в ПЛК. Запустить функционирование и мониторинг.
16. Открыть выходной вентиль компрессора.
17. Повторить пункты к. и л, в лаб.раб.10.
18. Описать принцип действия собранной схемы.
19. Составить алгоритм работы схемы.
20. Разработайте функциональную схему (при необходимости), в которой разделены исполнительная (силовая) часть и сигналы управления.
21. Составить логические уравнения (при необходимости), описывающие схему.
22. Внести в программу такие изменения, чтобы шток цилиндра Ц1 продолжал движение после однократного нажатия на кнопки SB1, SB2 (см. рисунок 11.1).
23. Повторить пункты 18…22.
24. Перевести рычаг управления компрессором в положение «Выключено», закрыть выходной вентиль компрессора.

Рис.11.1.Пример программы
25. Выключить питание стенда (три автоматических выключателя «Сеть»).
26. Сбросить давление из схемы. Для этого перевести клапан снизу фильтра в положение «Ручной» и вдавить вверх.
Выводы.
Контрольные вопросы.
1.Поясните значения условных знаков, изображённых на схеме рис.11.1.
2. Поясните, что нужно изменить в программе, чтобы шток ци-линдра Ц1 продолжал движение после однократного нажатия на кнопки SB1, SB2.
Рекомендуемые страницы:
lektsia.com