1 | Задержка включения реле по срабатыванию дискретного входа. Работа с таймером TON и обработка фронтов тригерами R_TRIG и F_TRIG | Скачать | ||||||||
2 | Работа с входами/выходами контроллера и таймерами TON и TOF | Скачать | ||||||||
3 | Реализация высокоскоростного таймера Counter 16 Bit | Скачать | ||||||||
4 | Задание ШИМ на выходе ПЛК | Скачать | ||||||||
5 | Работа с библиотекой SysLibTime. | Скачать | ||||||||
6 | Подсчет времени наработки станка с помощью библиотеки SysLibTime | Скачать | ||||||||
7 | Работа с модулем Archiver. Создание архива в памяти ПЛК | Скачать | ||||||||
8 | Работа с SysLibFiles. Создание файловых архивов. Анализ свободного места в ПЛК. Перезапись старых архивов | Скачать | ||||||||
9 | Использование менеджера задач для вызова POU | Скачать | ||||||||
10 | Вызов различных POU на различных языках | Скачать | ||||||||
11 | Реализация ПИД регулятора с АНР | Скачать | ||||||||
12 | Реализация простого ПИД регулятора | Скачать | ||||||||
13 | Реализация импульсного ПИД регулятора с ручным управлением | Скачать | ||||||||
14 | Реализация алгоритмов САУ-МП | Скачать | ||||||||
15 | Реализация графиков уставки | Скачать | ||||||||
16 | Работа с быстрыми входами/выходами по прерыванию высокочастотного таймера | Скачать | ||||||||
17 | Библиотека ПИД регулятора. | Скачать | ||||||||
18 | Получение заводских параметров ПЛК: заводской номер, дата выпуска и д.р (ПЛК1хх [М02]) | Скачать | ||||||||
19 | Получение статуса и параметров интерфейсов Ethernet и PPP (ПЛК1хх [М02]) | Скачать | ||||||||
20 | Получение данных о проекте: имя, автор, дата последнего изменения и д.р | Скачать | ||||||||
21 | Реализация команды ping на ПЛК (ПЛК1хх [М02]) | Скачать | ||||||||
22 | Пример архивации на USB накопитель (ПЛК1хх [М02]) | Скачать | ||||||||
| 23 | Пример загрузки проекта с USB-флеш-накопителя (ПЛК1хх [М02]) | Скачать | ||||||||
 Получение реального времени из ПЛК. Задание даты и времени в ПЛК
Получение реального времени из ПЛК. Задание даты и времени в ПЛК Испытана на таких параметрах как: разрежение в топке котла, уровень в барабане котла, соотношение топливо-воздух, нагрузка
Испытана на таких параметрах как: разрежение в топке котла, уровень в барабане котла, соотношение топливо-воздух, нагрузкаПрограммируемый логический контроллер ОВЕН ПЛК160
Отгрузка осуществляется в любой город России, а также: Белгород, Алексеевка, Беловское, Северный, Октябрский, Разумное, Стрелецкое, Таврово, Борисовка, Валуйки, Вейделевка, Волоконовка, Головчино, Губкин, Мелихово, Бехтеевка, Короча, Погореловка, Алексеевка, Красное, Бирюч, Ливенка, Красная Яруга, Новый Оскол, Прохоровка, Беленихино, Пролетарский, Сумовский, Ракитное, Ровеньки, Старый Оскол, Чернянка, Шебекино, Маслова Пристань, Яковлево, Строитель, Томаровка, Ржевка
Контроллер предназначен для:
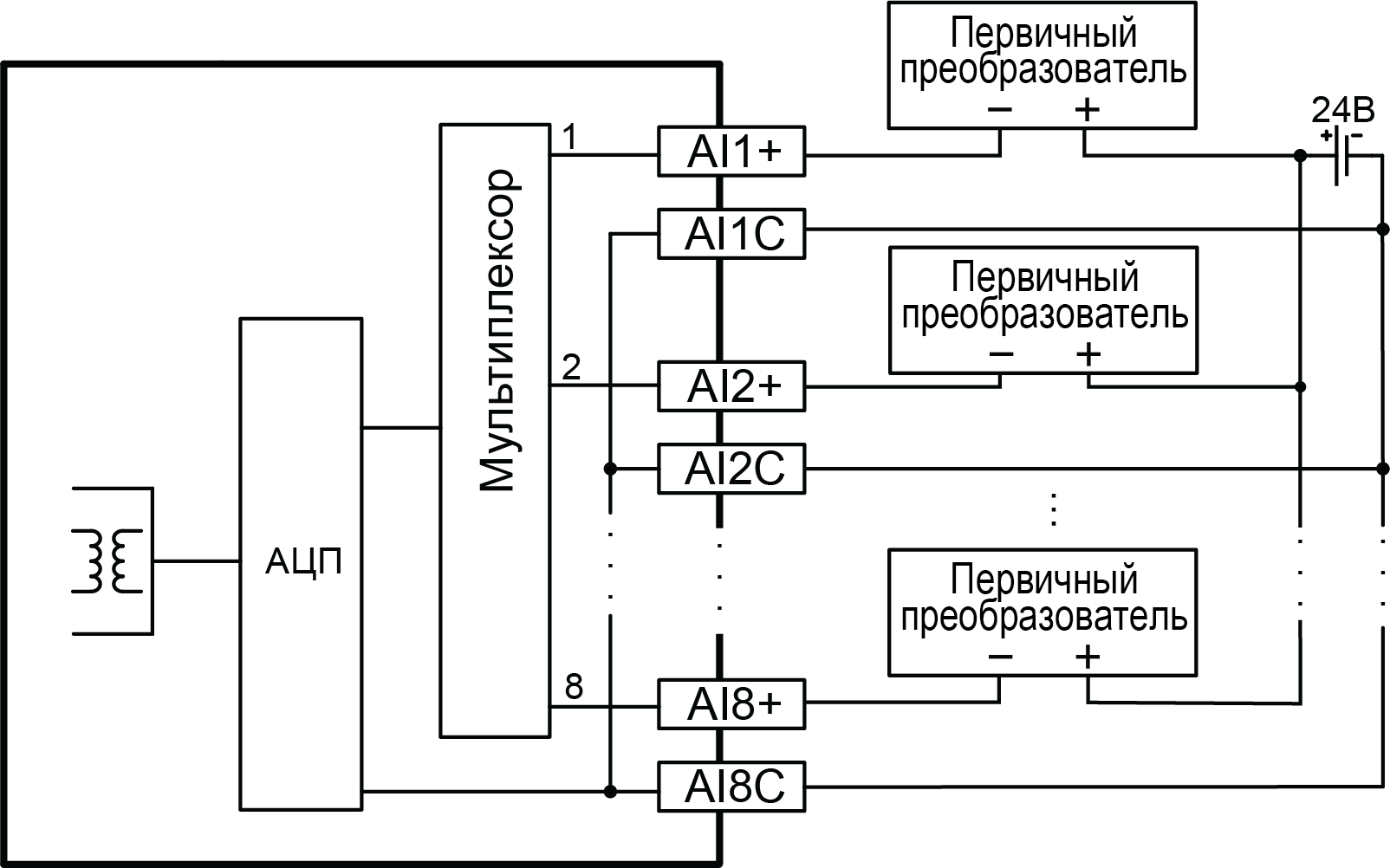
- Измерения аналоговых сигналов тока или напряжения и преобразования их к выбранной пользователем физической величине
- Измерения дискретных входных сигналов
- Управления дискретными (релейными) выходами
- Управления аналоговыми выходами
- Приема и передачи данных по интерфейсам RS-485, RS-232, Ethernet
- Выполнения пользовательской программы по анализу результатов измерения дискретных и аналоговых входов, управления дискретными входами и выходами, передачи и приема данных по интерфейсам RS-485, RS-232, Ethernet
Госповерка: не требуется
Контроллер может применяться для создания систем автоматизированного управления технологическим оборудованием в энергетике, на транспорте, в том числе железнодорожном, в различных областях промышленности, жилищно-коммунального и сельского хозяйства.
Контроллер может быть применен на промышленных объектах, подконтрольных Ростехнадзору.
Логика работы контроллера определяется потребителем в процессе программирования контроллера. Программирование осуществляется с помощью программного обеспечения CoDeSys 2.3.
Особенности:
- Широкие возможности самодиагностики контроллера
- Встроенный аккумулятор
- Встроенные часы реального времени
- Возможность создавать и сохранять архивы во Flash-памяти контроллера
Контроллер может быть использован как:
- Специализированное устройство управления выделенным локализованным объектом
- Устройство мониторинга локализованного объекта в составе комплексной информационной сети
- Специализированное устройство управления и мониторинга группой локализованных объектов в составе комплексной информационной сети
Технические характеристики:
| Параметр | Значение |
|
Напряжение питания: — ПЛК160-24.  — ПЛК160-220.Х-Х |
=22…28В (номинальное 24В) ~90…264В (номинальное 110/220В) |
|
Потребляемая мощность: — ПЛК160-24.Х-Х — ПЛК160-220.Х-Х |
≤ 35ВА ≤ 40ВА |
|
Параметры встроенного источника питания: — Выходное напряжение — Ток |
24 ± 3В ≤ 620мА |
| Количество дискретных входов | 16 |
| Минимальная длительность импульса, воспринимаемого дискретным входом |
0,02 мс (выводы DI1…DI2) 1 мс (выводы DI3…DI18) |
| Напряжение питания дискретных входов | 24 ± 3В |
| Максимальный входной ток дискретного входа |
≤ 7мА при питании 24В |
| Количество релейных выходных каналов | 12 |
| Время переключения из состояния «0» в состояние «1» и обратно |
Выходы DО1. ..DО14: 50 мс ..DО14: 50 мс |
| Максимальный ток, коммутируемый контактами реле |
≤ 3А (при напряжении не более 250В переменного тока и cos j > 0,4) ≤ 3А (при напряжении ≤ 30В постоянного тока) |
| Механический ресурс реле |
≥ 300 000 циклов переключений при максимальной коммутируемой нагрузке ≥ 500 000 циклов переключений при коммутации нагрузки менее половины от максимальной |
| Аналоговые входы | 8 |
| Тип поддерживаемых унифицированных сигналов |
Ток 0 (4)…20мА Ток 0…5мА Напряжение 0…10В |
| Предел основной приведенной погрешности | 0,25% |
| Разрешающая способность | ≥ 12 бит |
|
Входное сопротивление: — В режиме измерения тока — В режиме измерения напряжения |
≤ 170 Ом ≥ 200 кОм |
| Количество аналоговых выходов | 4 |
| Разрядность ЦАП | 10 бит |
|
Тип выходного сигнала: — ПЛК160-Х. 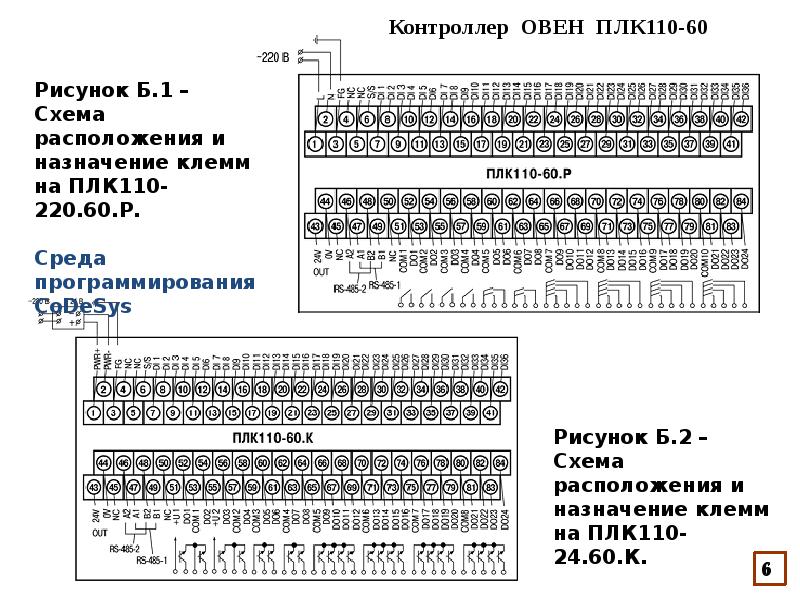 — ПЛК160-Х.У — ПЛК160-Х.А |
Ток 4…20мА Напряжение 0…10В Ток 4…20мА или напряжение 0…10В |
| Центральный процессор | RISC-процессор, 32 разряда, 200 МГц, на базе ядра ARM-9 |
| Объем оперативной памяти | 8 МБ, из них 1 МБ для кода пользовательской программы, 128 кБ для переменных пользовательской программы |
| Объем энергонезависимой памяти | 4 МБ, из них 3 МБ доступно для хранения файлов и архивов |
| Размер Retain-памяти | ≤ 16 кБ (по умолчанию задано значение 4 кБ) |
|
Время выполнения одного цикла программы: — Минимальное (нестабилизируемое) — Установленное по умолчанию (стабилизированное) |
250 мкс 1 мс |
| Индикация на передней панели | Светодиодная |
| Степень защиты корпуса | IP20 со сторон передней панели, IP00 со стороны клемм |
|
Условия эксплуатации: — Температура окружающей среды — Относительная влажность, при 25°С и более низких температурах без конденсации влаги — Атмосферное давление |
−10°С. ..50°С ..50°С80%RH 84…106,7 кПа |
| Крепление | На DIN-рейку |
| Вес |
Конфигурирование, программирование контроллеров, модулей ввода-вывода компании ОВЕН в пакете CoDeSys V2.3 и реализация систем регулирования
Объем программы: 40 часов
Цель программы: повышение квалификации
Категория слушателей: лица, имеющие среднее профессиональное и (или) высшее образования;
лица, получающие среднее профессиональное и (или)высшее образования
Продолжительность обучения: 14 дней
По окончании обучения выдается: удостоверение установленного образца о повышении квалификации
Содержание программы:
Вводная часть. Номенклатура приборов «Овен» для создания локальных и централизованных систем управления, характеристики, способы программирования
Номенклатура приборов «Овен» для создания локальных и централизованных систем управления, характеристики, способы программирования
Технические средства для измерения температуры. Принцип работы, способы подключения, особенности использования
Регулирование физической величины по двухпозиционному закону( теоретическая часть)
Реализация двухпозиционного закона регулирования с использованием регулятора ТРМ1
Регулирование физической величины по ПИД-закону
Конфигурирование регулятора ТРМ-101 с лицевой панели
Конфигурирование регулятора ТРМ-101 с помощью программы-конфигуратора
Использование функции автонастройки для определения коэффициентов ПИД-регулятора на примере ТРМ-101
Конфигурирование регулятора ТРМ-251 с лицевой панели
Конфигурирование регулятора ТРМ-251 с помощью программы-конфигуратора
Архивирование данных с помощью МСД-200
Использование промышленных контроллеров для реализации систем управления (типы контроллеров, способы и языки программирования, подключение датчиков и исполнительных устройств)
Применение сенсорных панелей для визуализации и настройки систем регулирования
Подать заявку на обучение
ДЛЯ ФИЗИЧЕСКИХ ЛИЦ ДЛЯ ЮРИДИЧЕСКИХ ЛИЦ
ПЛК 100 Программируемый логический контроллер ОВЕН
Программируемый логический контроллер ОВЕН ПЛК 100 предназначен
- Для создания систем управления малыми и средними объектами
- Построение систем диспетчеризации
- Построение системы управления и диспетчеризации на базе ОВЕН ПЛК возможно как с помощью проводных средств – используя встроенные интерфейсы Ethernet, RS-232, RS-485, так и с помощью беспроводных средств – использую радио, GSM, ADSL модемы
Конструктивные особенности ОВЕН ПЛК 100
- Контроллер выполнен в компактном DIN-реечном корпусе
- Расширение количества точек ввода\вывода осуществляется путем подключения внешних модулей ввода\вывода по любому из встроенных интерфейсов
- Два варианта питания 220В и 24В постоянного
Вычислительные ресурсы ОВЕН ПЛК 100
В контроллере изначально заложены мощные вычислительные ресурсы при отсутствии операционной системы:
- высокопроизводительный процессор RISC архитектуры ARM9, с частотой 180МГц компании Atmel;
- большой объем оперативной памяти – 8МБ;
- большой объем постоянной памяти – Flash память, 4МБ;
- объем энергонезависимой памяти, для хранения значений переменных – до 16КБ.


Конкурентные преимущества ОВЕН ПЛК 100
- Отсутствие ОС, что повышает надежность работы контроллеров
- Скорость работы дискретных входов – до 10КГц при использовании подмодулей счетчика
- Большое количество интерфейсов на борту: Ethernet, 3 последовательных порта, USB Device для программирования контроллера, работающих независимо друг от друга
- Расширенный температурный диапазон работы: от минус 20 до плюс 70 градусов Цельсия
- Широкие возможности самодиагностики контроллера
- Встроенный аккумулятор, позволяющий «пережидать» пропадани питания – выполнять программу при пропадании питания, и переводить выходные элементы в «безопасное состояние»
- Встроенные часы реального времени
- Возможность создавать и сохранять архивы на Flash контроллера
- Возможность работы по любому нестандартному протоколу по любому из портов, что позволяет подключать устройства с нестандартным протоколом (электро-, газо-, водосчетчики, считыватели штрих — кодов и т. д.)
- Набор готовых программных модулей, предоставляемых бесплатно
 д.)
д.)
Программирование контроллеров
Создание программ для контроллеров ОВЕН ПЛК100, и их конфигурирование осуществляется профессиональной системой программирования CoDeSys v.2.3.6.1 и старше.
Система программирования CoDeSys для покупателей контроллеров ОВЕН совершенно бесплатна, и записывается на диски, идущие в комплекте с контроллерами.
Получить более подробную информацию по системе программирования CoDeSys и скачать её можно с нашего сайта или с сайта производителя www.3s-software.ru.
Сервисное программное обеспечение ОВЕН ПЛК100
Программа обновления прошивки (внутреннее ПО) контроллера ОВЕН ПЛК100 и таргет файлы можно скачать в разделе «Сервисное ПО контроллеров ОВЕН ПЛК 100».
Дополнительные утилиты
Для удобства пользователей компанией ОВЕН созданы дополнительные утилиты:
- EasyWorkPLC – утилита для технолога, позволяющая изменять значения параметров, не изменяя при этом программу контроллера. Работает без CoDeSys;
- PLC_IO – утилита для работы с файловой системой контроллера, например запись\считывание файлов с ПЛК. Работает без CoDeSys.
 Работает без CoDeSys;
Работает без CoDeSys;Подробнее узнать про утилиты и скачать их можно на странице Утилиты EasyWorkPLC и PLC_IO.
Так же клиентам доступна утилита, позволяющая произвести обновление встроенного ПО ПЛК без доставки контроллеров в сервис-центр: непосредственно у клиента.
Скачать данную утилиту можно на странице среды программирования CoDeSys.
Документацию по программированию контроллера можно скачать со страницы документации.
Сертификаты и разрешения для контроллеров ОВЕН ПЛК100
Программируемый логический контроллер ОВЕН ПЛК100 имеет следующие сертификаты:
- сертификат Соответствия;
- разрешение котлонадзора на использование на поднадзорных объектах.
Поддерживаемые интерфейсы и протоколы
Протокол | Интерфейс | Применение |
ОВЕН | RS-232 | Поддержка модулей ОВЕН МВА8, МВУ8. |
Modbus RTU | RS-232 | Поддержка модулей ввода/вывода и операторских панелей, связь со SCADA-системами |
Modbus TCP | Ethernet 10/100 Mbps | Поддержка модулей ввода/вывода, например ADAM-6000, связь со SCADA-системами |
DCON | RS-232 | Поддержка модулей ввода/вывода I-7000, АDAM-4000, операторских панелей |
GateWay | RS-232 | Программирование контроллера, отладка пользовательской программы (в т.ч. высокоскоростная отладка в режиме Realtime по Ethernet). |
Mass Storage Device | USB-Device | Представление Flash-диска ПЛК как внешнего файлового накопителя. |


Контроллеры ОВЕН ПЛК позволяют организовать шлюз между приборами с протоколом ОВЕН (RS-485) и промышленными сетями с протоколами Modbus, Modbus TCP, DCON.
Пользователь имеет возможность реализовать в среде программирования CoDeSys собственный протокол, не поддерживаемый ОВЕН ПЛК. В этом случае он может воспользоваться специальной библиотекой, которая открывает низкоуровневый доступ к последовательным портам ОВЕН ПЛК (библиотека входит в комплект поставки контроллера).
Технические характеристики
Общие сведения
Конструктивное исполнение | Унифицированный корпус для крепления на DIN-рейку (ширина 35 мм), длина 105 мм (6U), шаг клемм 7,5 мм |
Степень защиты корпуса | IР20 |
Напряжение питания: ПЛК100-24
ПЛК100-220 |
18. 90… 264 В переменного тока (номинальное напряжение 220 В) частотой 47… 63 Гц |
Потребляемая мощность, не более ПЛК100-24 ПЛК100-220 | 6 Вт* 10 Вт |
Индикация передней панели | 1 индикатор питания 8 индикаторов входов 12 индикаторов выходов |
 .. 29 В постоянного тока (номинальное напряжение 24 В)
.. 29 В постоянного тока (номинальное напряжение 24 В)
Ресурсы
ПЛК100 контроллер для малых систем автоматизации с DI/DO
ОВЕН ПЛК100 – моноблочный контроллер с дискретными входами/выходами на борту для автоматизации малых систем
Назначение контроллера ОВЕН ПЛК100
- Создание систем управления малыми и средними объектами.
- Построение систем диспетчеризации.
Особенности ОВЕН ПЛК100
- Компактный DIN-реечный корпус.
- Дискретные входы/выходы на борту.
- Наличие последовательных портов (RS-485, RS-232) и Ethernet.
- Расширение количества точек ввода/вывода осуществляется путем подключения внешних модулей ввода/вывода по любому из встроенных интерфейсов.
- Два варианта питания: 220 В переменного тока и 24 В постоянного тока.

Конкурентные преимущества ОВЕН ПЛК100
- Отсутствие ОС, что повышает надежность работы контроллеров.
- Скорость работы дискретных входов – до 10 КГц при использовании подмодулей счетчика.
- Большое количество интерфейсов на борту, работающих независимо друг от друга: Ethernet, 3 последовательных порта, USB Device для программирования контроллера.
- Встроенный аккумулятор, позволяющий «пережидать» пропадание питания: выполнение программы при пропадании питания и перевод выходных элементов в «безопасное состояние».
- Встроенные часы реального времени.
- Контроллер поддерживает работу с нестандартными протоколами по любому из портов, что позволяет подключать такие устройства как электро-, газо-, водосчетчики, считыватели штрих-кодов и т. п.
 п.
п.Программирование контроллеров ОВЕН ПЛК100
Программирование контроллеров ОВЕН ПЛК100 осуществляется профессиональной системой программирования CODESYS v.2.
Система программирования CODESYS для покупателей контроллеров ОВЕН предоставляется бесплатно.
Получить более подробную информацию по системе программирования CODESYS и скачать её можно с нашего сайта или с сайта производителя www.3s-software.ru.
Сервисное программное обеспечение ОВЕН ПЛК100
Программа обновления прошивки (внутреннее ПО) контроллера ОВЕН ПЛК100 и таргет-файлы можно скачать в разделе «Сервисное ПО контроллеров ОВЕН ПЛК100».
Дополнительные утилиты
Для удобства пользователей специалистами компании ОВЕН созданы дополнительные утилиты:
- EasyWorkPLC – утилита для технолога, позволяющая изменять значения параметров, не изменяя при этом программу контроллера. Работает без CODESYS.
- PLC_IO – утилита для работы с файловой системой контроллера, например, запись/считывание файлов с ПЛК. Работает без CODESYS.
 Работает без CODESYS.
Работает без CODESYS.Подробнее узнать про утилиты и скачать их можно на странице Утилиты EasyWorkPLC и PLC_IO.
Ознакомиться с сертификатами можно скачать на странице сертификатов к приборам.
Функциональная схема
ARIES Контроллер LYNX
ARIES / LYNX использует Motionnet и актуализировал управление до 32 осей, подключив
LYNX (2-осевой подчиненный контроллер) максимум 15 устройств.
Используя удобный терминал «PYXIS» с сенсорной панелью, продаваемый отдельно, такие операции, как пробный запуск, настройка
и т. Д., Можно легко выполнять без ПК.
[Характеристики]
Принято Motionnet
Принято Motionnet, управление сценой максимум для 32 осей возможно с хост-контроллера (ПК и т. Д.)) через порт связи.
Д.)) через порт связи.
Количество управляющих осей может быть увеличено с помощью 2-х осевого блока путем подключения нескольких блоков LYNX к одному ARIES.
Дискретный драйвер двигателя
Поскольку драйвер двигателя является отдельным типом, он может быть подключен к различным драйверам двигателя с типами необработанных импульсных команд, как показано ниже.
· Драйвер 5-фазного шагового двигателя
· Драйвер 2-фазного шагового двигателя
· Драйвер серводвигателя
· Драйвер α STEP
Доступны коробки привода серии «TITAN», которые можно легко подключить с помощью кабеля.
Функция линейной интерполяции
Привод линейной интерполяции возможен с дополнительными 2-мя или 3-мя осями.
Если необходима функция интерполяции дуги окружности (опция), обратитесь в наш отдел продаж.
Триггерный выход
Пусковой сигнал, синхронизированный либо с импульсом двигателя, либо с импульсом энкодера по 2 осям внутри ОВЕНА, может выводиться для внешнего измерения
оборудования.
Кроме того, может выводиться сигнал запуска с синхронизированным сигналом запуска с сигналом BUSY (управление), постоянный сигнал, при запуске и в конце возбуждения,
и необязательная синхронизация (выдача команды).
Общий ввод / вывод
Имеется 8 точек на общем выходном сигнале, которые могут опционально управлять ВКЛ / ВЫКЛ и на входном сигнале, которые могут контролировать состояние ВКЛ / ВЫКЛ
соответственно, и каждая из них изолирована оптопарой.
RS-232C, Ethernet 2 типа коммуникационного порта
ОВЕН управляется командой от хост-контроллера (ПК и т. Д.) Через коммуникационный порт. Имеются два выбираемых порта связи
, RS-232C и Ethernet.
Управление автомобилем с помощью портативного терминала «PYXIS»
При использовании ручного терминала с сенсорной панелью «PYXIS» (продается отдельно) возможна ступенчатая работа с ручным управлением
. Возможны возврат в исходную точку, привод абсолютного положения, привод относительного положения, выбор таблицы скоростей
Возможны возврат в исходную точку, привод абсолютного положения, привод относительного положения, выбор таблицы скоростей
, изменение настроек различных параметров системы, изменение настроек каждой таблицы скорости,
и аварийный останов с помощью переключателя аварийной остановки.
* Прилагаемый кабель питания предназначен для использования в Японии.Пожалуйста, предоставьте его клиентом, если потребуется другой кабель питания. (~ 125 В)
Кабель TITAN-AⅡ / DⅡF для контроллера (импульсный / сенсорный кабель)
Кабель для соединения контроллера (ARIES, LYNX) и драйвера (TITAN).
Стать разработчиком Hyperledger Aries
Данные движут нашим миром сегодня. Однако мы постоянно слышим об утечках данных и краже личных данных. Доверие к Интернету подорвано, и это необходимо исправить. Таким образом, крайне важно, чтобы мы приняли новый подход к управлению идентификационной информацией и обеспечили безопасность данных и конфиденциальность пользователей с помощью защищенных от несанкционированного доступа транзакций и инфраструктуры.
Децентрализованное управление идентификацией на основе блокчейна революционизирует эту сферу. Три проекта Hyperledger с открытым исходным кодом, Aries, Indy и Ursa, обеспечивают основу для распределенных приложений, построенных на аутентичных данных, приложений, реализующих концепцию «Trust over IP». Вместе эти три проекта предоставляют инструменты, библиотеки и повторно используемые компоненты для создания и использования независимых цифровых идентификаторов, основанных на блокчейнах или других распределенных реестрах, которые могут взаимодействовать между юрисдикциями, приложениями и другими хранилищами данных.Хотя этот курс охватывает все, что вам нужно знать об Indy и Ursa, основное внимание уделяется Овну и тому, как вы можете использовать его для быстрого создания собственных приложений на прочной цифровой основе доверия. Этот фокус будет объяснен далее в курсе, но пока будьте уверены: если вы хотите начать разработку децентрализованных приложений идентификации, основанных на блокчейне, Овен — это то, что вам нужно.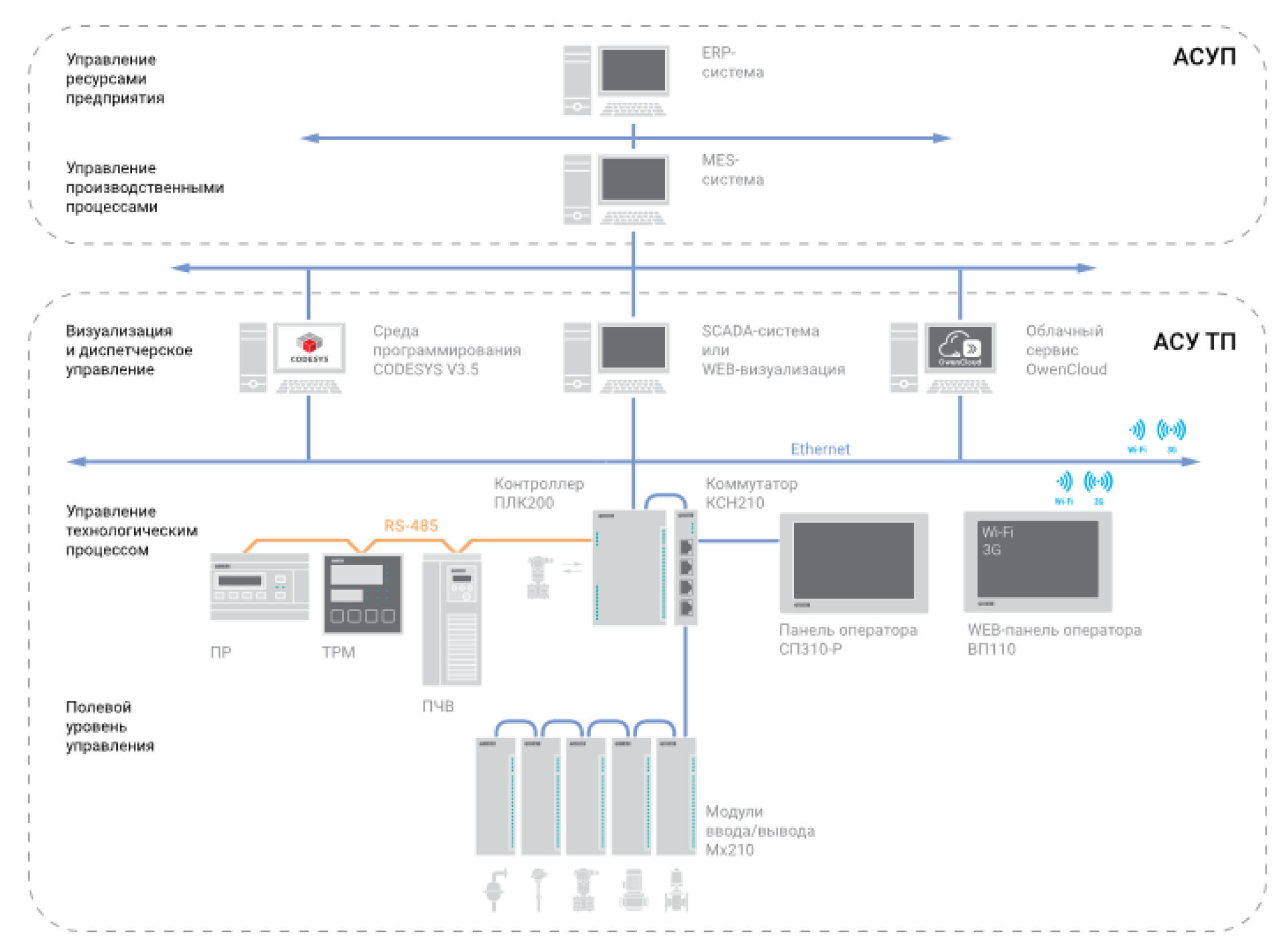
Этот курс поможет вам от (в значительной степени) нуля до разработки кода для выдачи, хранения и проверки учетных данных с помощью ваших собственных готовых к работе агентов Aries.По пути вы узнаете, как агенты Aries используют бухгалтерские книги Hyperledger Indy (вы даже будете запускать свои собственные экземпляры реестра), углубитесь в архитектуру и компоненты агента Aries и узнаете о лежащих в его основе протоколах обмена сообщениями. Что наиболее важно, вы начнете создавать приложения, которые будут соответствовать вашему доверию в отношении вариантов использования IP, независимо от того, включают ли они учетные данные о вакцинации COVID-19, цифровые водительские права, подтверждение занятости, изменение климата или что-то еще. Возможности безграничны!
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Техническое описание
Техническое описание  Полная прямоугольная форма Aries обеспечивает большую площадь печатной платы и береговую линию для поддержки экстремального уровня ввода-вывода, предлагаемого платой.
Полная прямоугольная форма Aries обеспечивает большую площадь печатной платы и береговую линию для поддержки экстремального уровня ввода-вывода, предлагаемого платой.Брошюра о контроллере ACR Aries — [PDF-документ]
27.07.2019 Брошюра о контроллере ACR Aries
1/24
Платформа управления ACR Многоосевой контроллер с одной осью
7/7 / 2019 Брошюра о контроллерах ACR Aries
2/24
www.parkermotion.com Parker Hannifin Corporation Подразделение электромеханической автоматизации
2
Платформы управления ACR
Компания Parker, мировой лидер в области управления движением, понимает проблемы, с которыми сталкиваются OEM-производители в сфере высоких технологий. промышленность как медицина
производство устройств, полупроводников и плоских дисплеев.Чтобы помочь решить эти задачи, компания Parker создала команду высококвалифицированных проектировщиков систем управления движением, которые используют систематический процесс управления проектами для реализации самой передовой доступной технологии линейного движения. И все это поддерживается глобальной инфраструктурой. Высокотехнологичные OEM-производители ищут партнеров в движении.
Для производителей медицинского оборудования интегрированные решения для автоматизации Parkers специально разработаны для сокращения времени, затрачиваемого на маркетинг, и затрат на инженерные разработки, помогая при этом соблюдать строгие государственные нормы.
Обладая опытом вакуумной подготовки, подготовкой чистых помещений и обширным опытом работы с широкоформатными системами, мы проектируем и производим компоненты и системы движения, которые задействуют ваши технологии и увеличивают производительность за счет точного и скоординированного движения.
27.07.2019 Брошюра о контроллере ACR Aries
3/24
Parker Hannifin Corporation Подразделение электромеханической автоматизации
www.parkermotion.com
3
Решения для промышленной автоматизации от Parker Automation объединяют скорость, точность и высокую нагрузку возможность предоставить машиностроителям
и OEM-производителям конкурентное преимущество.
Parker — единственный поставщик, который может предоставить OEM-производителям комплексные технические и инженерные решения для любых требований к упаковке. Инновационные разработки Parkers, широта линейки, всемирное распространение и превосходное обслуживание клиентов устанавливают стандарты на рынке промышленного движения.
Application Analysis
Техническая поддержка
Проектирование систем
2-летняя гарантия на сборки, комплекты и подсистемы
Сертификат ISO
Глобальная поддержка и услуги
27.07.2019 ACR Aries Controller Brochure
4/24
www.parkermotion.com Parker Hannifin Corporation Подразделение электромеханической автоматизации
4
Платформы управления ACR
Решения для проектирования систем
Комплексные платформы управления движением Parkers позволяют разработчикам машин выбирать архитектуру управления движением, которая лучше всего подходит для их конкретного применения. Многоосевой или одноосный, централизованный или распределенный, управляемый ПК или автономный — у Parker есть решение.
Общая программная среда
Какая бы платформа управления ни была выбрана, инженеры теперь могут конфигурировать, программировать и использовать Parkercontrols в единой программной среде
ACRView.Среда ACRView поддерживает традиционные аналоговые многокоординатные системы управления и приводы Parkers, многоосевую систему ETHERNET Powerlinkmotionbus и одноосный привод / контроллер Aries Controller. Эта общая программная среда позволяет проектировщикам машин и конечным пользователям использовать преимущества высокопроизводительного сервоуправления ACR как для одноосных, так и для многоосных проектов без переключения или повторного изучения различных языков управления и программных сред. Преимущества языка и программного обеспечения Common Control
включают сокращение времени вывода на рынок и снижение общих затрат на систему управления перемещением.
Масштабируемость
Различные машины имеют разные требования к перемещению. С масштабируемой платформой ACRControls от Parkers не имеет значения, является ли ваш текущий проект большим или маленьким, двухточечным или скоординированным, есть контроллер Parker, который как раз подходит для этой работы. Сэкономьте время и деньги, купив только необходимый элемент управления. Во время следующего обзора проекта или дизайна
масштабирование до многоосевого или до одноосного масштабирования выполняется так же просто, как щелчок по кнопке.
27.07.2019 Брошюра по контроллеру ACR Aries
5/24
Parker Hannifin Corporation Подразделение электромеханической автоматизации
www.parkermotion.com
5
Возможности управления движением и программирования
Платформа управления ACR поддерживает широкий спектр приложений управления движением, обеспечивая проектировщику станков беспрецедентный уровень гибкости. Управление высокопроизводительной многоосевой круговой интерполяцией доступно в платформе ACR.
Многозадачность до 24 одновременных программ Несколько систем координат Интерполяция до восьми осей в любой комбинации Изменение параметров движения на лету Сегментированный электронный кулачок
Электронный редуктор с опережением фазы в реальном времени Линейная, круговая и винтовая интерполяция Автоматическая тангенциальная и параллельное выравнивание инструментов Прерывистые перемещения Аналоговая или цифровая обратная связь Двойная обратная связь Портальная блокировка Обучение данных и воспроизведение Компенсация люфта и шарико-винтовой передачи
Возможности подключения
Поддержка Ethernet TCP / IP 10/100 Base-T, EtherNet / IP, USB2.0, RS232, RS485 и CANOpenensures поддерживают широкий спектр устройств, включая ПК, ПЛК, расширения ввода-вывода и человеко-машинного интерфейса. Несколько каналов обслуживаются одновременно, что дает пользователям множество возможностей для подключения ПК и ПЛК.
Parker ACR Control Solutions
Многоосевой контроллер ACR9000 1–8 осей, серво или шаговый
Контроллер шины движения ACR ETHERNET Powerlink
1–16 осей, серво или шаговый
(более подробную информацию см. На стр. 23 )
Контроллер Aries
Одноосный сервопривод / контроллер
27.07.2019 Брошюра о контроллере ACR Aries
6/24
www.parkermotion.com Parker Hannifin Corporation Подразделение электромеханической автоматизации
6
Платформы управления ACR
Цифровой сервопривод Aries
Характеристики Контроллер DriveTalkTM ACR9000 может получить доступ к
всем параметрам привода. поддерживается обратная связь энкодера и резольвера
Постоянные токи от 1 до 16 А (среднеквадратичное значение) 120/240 В перем. расценки и простота монтажа.The Aries может работать с ротационными или линейными серводвигателями с широким спектром устройств обратной связи, что делает его идеальным выбором привода для решения различных машинных задач.
Multi-Axis Motion Control
ACR 9000 Motion Controller
Характеристики До 8 осей серво или шагового управления Расширенная многозадачность до 24 одновременных программ Интерполяция 8 осей в любой комбинации 10/100 Base-T Ethernet USB 2.0 EtherNet / IP-совместимость Поддержка абсолютного энкодера через SSI ACRView Software Development Kit Оптически изолированные входы и выходы 24 В пост. Первоклассный автономный контроллер движения, способный контролировать до 8 осей движения.ACR9000 выделяется как автономная машина и контроллер движения, взаимодействующий с ПЛК или работающий вместе с ним. ACR9000 включает простые в использовании инструменты разработки проектов, которые позволяют быстро и эффективно создавать и поддерживать приложения. ACR9000 — это решение для автономных приложений, требующих лучшей в отрасли производительности
в доступном и простом в использовании корпусе.
DriveTalkTM делает Aries
и ACR9000 отличным совпадением. Каждая ось на ACR9000 включает канал
DriveTalk, который обеспечивает связь с сервоприводами серии
Parkers Aries.Конфигурация и диагностика
для привода могут выполняться с помощью контроллера
.
Аналоговый сигнал +/- 10 В для крутящего момента
и режимов скорости
27.07.2019 Брошюра о контроллере ACR Aries
24/7
Parker Hannifin Corporation Подразделение электромеханической автоматизации
www.parkermotion.com 70008
Одноосное управление движением
Контроллер Aries Одноосный сервопривод
Привод / контроллер
Характеристики 7 встроенных входов (4 стандартных, 3 высокоскоростных), 4 выхода Расширенная многозадачность до 16 одновременных программ Встроенный 2-портовый концентратор Ethernet Комплект разработчика программного обеспечения ACRView Управление поворотным или линейным серводвигателем 3, 4.Постоянный ток 5 и 6,3 A, постоянный ток 120/240 В переменного тока Несколько вариантов обратной связи
Интеллектуальный энкодер, квадратурный энкодер, абсолютный энкодер HeidenhainEnDat
Автонастройка CE (EMC и LVD), признано UL
Одноосный сервопривод контроллера Aries Drive предоставляет широкий спектр автономных возможностей. Контроллер Aries сочетает в себе преимущества производительности цифрового сервопривода Aries с ведущей в отрасли платформой контроллеров ACR9000. Благодаря подключению к сети Ethernet, встроенному вводу-выводу и простым в использовании инструментам разработки проектов ввод в эксплуатацию одноосевого движения является простым и эффективным.
Мощные возможности одноосного перемещения
Используя ведущую в отрасли производительность платформы ACR9000motion в одноосном форм-факторе, AriesController обладает возможностями перемещения и программирования, далеко превосходящими его аналоги. Контроллер Aries является самым высокопроизводительным одноосевым контроллером в своем классе, от возможности многозадачного программирования до отслеживания на основе кодировщика с опережением фазы в реальном времени.
Многозадачность до 16 одновременных программ
Управление положением, скоростью и крутящим моментом Постепенное или абсолютное движение Трапециевидные или сегментированные профили движения Изменение параметров движения на лету Линейное и S-образное ускорение Встроенные программируемые концевые выключатели Высокая скорость ( 1us) регистры захвата положения Регистрация движений Индексирование движений Электронный редуктор с опережением фазы в реальном времени
Контроллер Aries сочетает в себе мощные функции контроллера ACR с цифровым сервоприводом
Aries для полного автономного сервопривода
в одном небольшом корпусе.
27.07.2019 Брошюра по контроллеру ACR Aries
8/24
www.parkermotion.com Parker Hannifin Corporation Отдел электромеханической автоматизации
8
Платформы управления ACR
Ether
Американский институт аэронавтики и астронавтики
3
позволит завершить эксперимент «Электромагнитная среда
».
4
После завершения
этих первых летных испытаний, серьезная задача по переконфигурированию самолета
для его исследовательской конфигурации
была начата всерьез. В то время как B-
737 прибыл в Лэнгли уже настроенным как функционирующий испытательный центр
, многие факторы диктовали, что
B-757 претерпит метаморфозу в
Лэнгли, выполненную государственным служащим Лэнгли и
сотрудниками подрядчика.Опыт, накопленный за
лет работы с B-737, обеспечил
корпоративных знаний и чрезвычайно способный персонал
для выполнения этой задачи. Независимо от этих
бесценных ресурсов, стоящая перед нами задача будет монументальной
, требующей усилий многих людей
и организаций, включая обширные технические ресурсы
от Boeing и многих из их поставщиков подсистем
.В течение следующих нескольких лет, пройдя несколько этапов
, самолет продолжил свою эволюцию
в действующий испытательный центр.
Именно в это время, в декабре 1998 года, самолету
было официально присвоено имя ОВЕН,
, что помогло еще больше определить его уникальную роль как участника
в области авиационных исследований.
Концепция Sim-to-Flight
Еще до прибытия в Лэнгли, ARIES
задумывался как неотъемлемая часть исследовательских центров Transport
(TRF).TRF — это набор инструментов
, используемых в концепции «имитация полета». Эта концепция
включает в себя общее программное обеспечение, оборудование и процессы
как для наземных авиасимуляторов, так и для
для B-757, предоставляя правительству и промышленности
, что является эффективным способом разработки и тестирования новых технологий
. пропускная способность, безопасность и эксплуатационные потребности
постоянно меняющейся национальной системы воздушного пространства
3
.Эти средства обеспечивают плавный непрерывный поток исследований
от моделирования до реальных летных испытаний
.
В концепции моделирования полета
используются три основных средства. Первым из них является Cockpit Motion
Facility (CMF), лаборатория моделирования полета с несколькими кабинами, фиксированными и движущимися
, которая включает кабину симулятора
Integration Flight Deck (IFD),
Research Flight Deck ( RFD) кабина симулятора и
Research System Integration Laboratory (RSIL).Кабина IFD
очень похожа на палубу или кабину пилота 757 прямого полета
и используется для поддержки испытаний в полете
на ARIES и для исследований интеграции систем самолетов
. Кабина RFD — это усовершенствованная дозвуковая транспортная кабина
, используемая для полной рабочей нагрузки экипажа —
и полной интеграции систем самолета
, разработанных и испытанных научным сообществом.
RSIL представляет собой наземную лабораторную версию бортовой исследовательской системы
ARIES (описанной ниже)
и используется для интеграции ключевого оборудования и программных систем
, необходимых для моделирования.Второй крупный объект
— это Лаборатория интеграции систем полета
(FSIL), аналог
RSIL по летным испытаниям. FSIL используется для интеграции самолетов
и предполетной проверки ключевых аппаратных и программных систем
, предназначенных для ARIES. Третий объект —
757. В настоящее время ARIES имеет бортовую исследовательскую систему
под названием Транспортная исследовательская система (TRS) и
Исследовательская станция полетной палубы (FDRS), обе из
, которые подробно описаны ниже.
Обзор концепции ARIES
Одним из атрибутов, сделавших B-737 таким мощным исследовательским инструментом
, была исследовательская или кормовая палуба
(AFD), расположенная в кабине самолета.
Это позволило выполнить большую часть исследовательской работы по
в AFD, сохранив при этом стерильную кабину безопасности для двух экипажей
впереди, в передней полетной палубе (FFD)
. При снятии с эксплуатации B-737, план
Лэнгли для B-757 всегда предусматривал интеграцию
и установку AFD на самолет
.Из-за ресурсных и бюджетных ограничений
необходимо было использовать отложенный поэтапный подход к
для реализации этой полномасштабной исследовательской системы.
Первоначальные модификации кабины и кабины B-757
были сосредоточены на создании базовой экспериментальной инфраструктуры
, получившей название Транспортная
Исследовательская система. TRS состоит из
исследовательских компьютерови систем сбора данных, используемых
для поддержки экспериментов и тестов.Это оборудование
распределено по кабине, кабине и грузовым
трюмных помещениях самолета как на обслуживаемых, так и на
беспилотных станциях поддонов. Основные модификации
, выполненные в поддержку TRS, включали установку
охлаждающих каналов и распределение мощности судна на
каждого места расположения поддонов, а также установку подвесных кабельных лотков
в кабине для размещения проводки сигналов
.Конфигурация поддонов и компоновка салона претерпели изменения
по мере развития модификаций самолета
для удовлетворения промежуточных исследовательских потребностей, но даже
с достижением текущей конфигурации Coupled Baseline
система поддерживает большую часть разработанных
. -в гибкости. Несколько мест для поддонов
зарезервированы для установки поддонов в соответствии с проектом.
Модификация и интеграция специального исследовательского оборудования
является основной целью самолета
и TRS.
Многие из развивающихся исследований, нацеленных на полет
на ARIES, требуют реального «из окна»
B52 Aries Plus 2.0 Instruction Manual (стр. 6)
www.b52audio.com
6
РЕЖИМ VALET (с дистанционным выбором)
ОБУЧЕНИЕ КОДУ
1) В выключенном состоянии откройте дверь, переведите ACC в положение ON, нажмите + в течение 2 секунд,
Сиренаиздает один звуковой сигнал, сигнализируя о переходе в режим камердинера, светодиод горит.
2) В режиме камердинера нажимайте или для блокировки и разблокировки.
3) Если вы собираетесь сдать свой автомобиль в сервисный центр, включите зажигание, нажав +
.одновременно в течение 2 секунд одновременно. Сирена издает однократный звуковой сигнал, а светодиодный индикатор загорается на
.войдите в этот режим.
4) ДЛЯ ВЫХОДА: Чтобы повторить шаг 1, сирена издаст два звуковых сигнала для выхода из этого режима, светодиод выключится.
1) При снятии с охраны откройте двери, переведите ACC из ВЫКЛ в ВКЛ., Удерживая нажатой кнопку сброса 3
сек, сирена издает один звуковой сигнал, а светодиод продолжает гореть, указывая на то, что система вошла в
.режим обучающего кода.
2) Нажмите любую кнопку на пульте дистанционного управления в течение 10 секунд. Сирена издает один раз, чтобы показать, что
первый пульт дистанционного управления успешно обучен.
3) Повторите шаг 2, чтобы запрограммировать второй, третий и четвертый код передатчика (сирена
дважды издает звуковой сигнал, указывая на то, что второй код передатчика был изучен, сирена издает звуковой сигнал 3
раза, чтобы указать, что третий код передатчика был изучен, сирена издает 4 раза, чтобы
означает, что четвертый код передатчика был изучен).Когда был изучен четвертый,
сирена издает два звуковых сигнала, указывая на выход из программы.
4) После изучения необходимого пульта дистанционного управления переведите ACC с ON на OFF или не делайте этого.
нажмите пульт в течение 10 секунд, система автоматически выйдет из режима обучения,
сирена издаст два звуковых сигнала.
ВНИМАНИЕ: (система может запрограммировать только четыре пульта дистанционного управления) при изучении пятого пульта дистанционного управления; первые
один будет удален.
Основной блок
Выходной ток: 10 А × 1
Кодирование: код обучения
Напряжение: 12 В постоянного тока ± 3 В
Статический ток:
Ток индикатора: 2 мА
Ток датчика удара:
Частота: 315 МГц
Пульт (Aries Plus / A52):
Напряжение: 12 В
Статический ток:
Батарея: 27А
Частота: 315 МГц
Беспроводной контроллер тормоза для вашего смартфона
1.Что произойдет, если мой телефон умрет или соединение Bluetooth потеряно?
Echo® — это контроллер электрического тормоза, работающий по принципу «включай и работай». После настройки устройство останется на последней сохраненной настройке, даже если телефон отключится или соединение Bluetooth будет потеряно. Если Bluetooth отключен, устройство продолжит работать с последней сохраненной настройкой, но функция ручной коррекции будет потеряна.
2. Как Echo® знает, когда тормозить?
Echo® включает тормоза прицепа, когда педаль тормоза автомобиля нажата, а его трехосевой акселерометр определяет остановочное движение.
3. Если у меня уже установлен контроллер тормоза и я хочу перейти на Echo®, нужно ли мне отключить и удалить существующий контроллер тормоза?
Если на вашем автомобиле установлен 7-канальный блок питания 12 В, Echo® заменит существующий блок управления тормозами прицепа. Нет технической необходимости в удалении устройства с проводным подключением.
4. Как далеко распространяется сигнал Bluetooth?
Беспроводной контроллер тормоза Echo® разработан для обеспечения соединения Bluetooth на расстоянии до 50 футов.без препятствий. Это также может быть ограничено мощностью сигнала Bluetooth вашего телефона.
5. Будет ли мой экран оставаться включенным во время использования приложения?
Да, приложение предотвратит переход экрана телефона в спящий режим. Если вы предпочитаете, чтобы ваш телефон находился в спящем режиме, вы можете выключить экран. Однако, как упоминалось в вопросе 1, вы потеряете функцию ручной коррекции.