Инструкции по созданию роботов на базе контроллеров:
Этот раздел сайта посвящен пошаговым инструкциям с фото и видео по изучению arduino, основам использования микроконтроллеров arduino в робототехнике. Проекты с контроллером arduino uno и starter kit. Практическая энциклопедия по arduino проектам для начинающих. Схемы и примеры arduino на русском. Основы работы со скетчами arduino, описания комплекта, программируем arduino. Программирование ардуино своими руками, описание ардуино комплектов для создания роботов. Конструируем роботов на базе arduino самостоятельно. Собираем примеры сборки ардуино роботов. Скетчи и проекты для arduino проектов для начинающих новичков и специалистов:
library_books Подборки: DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданиюВозможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками.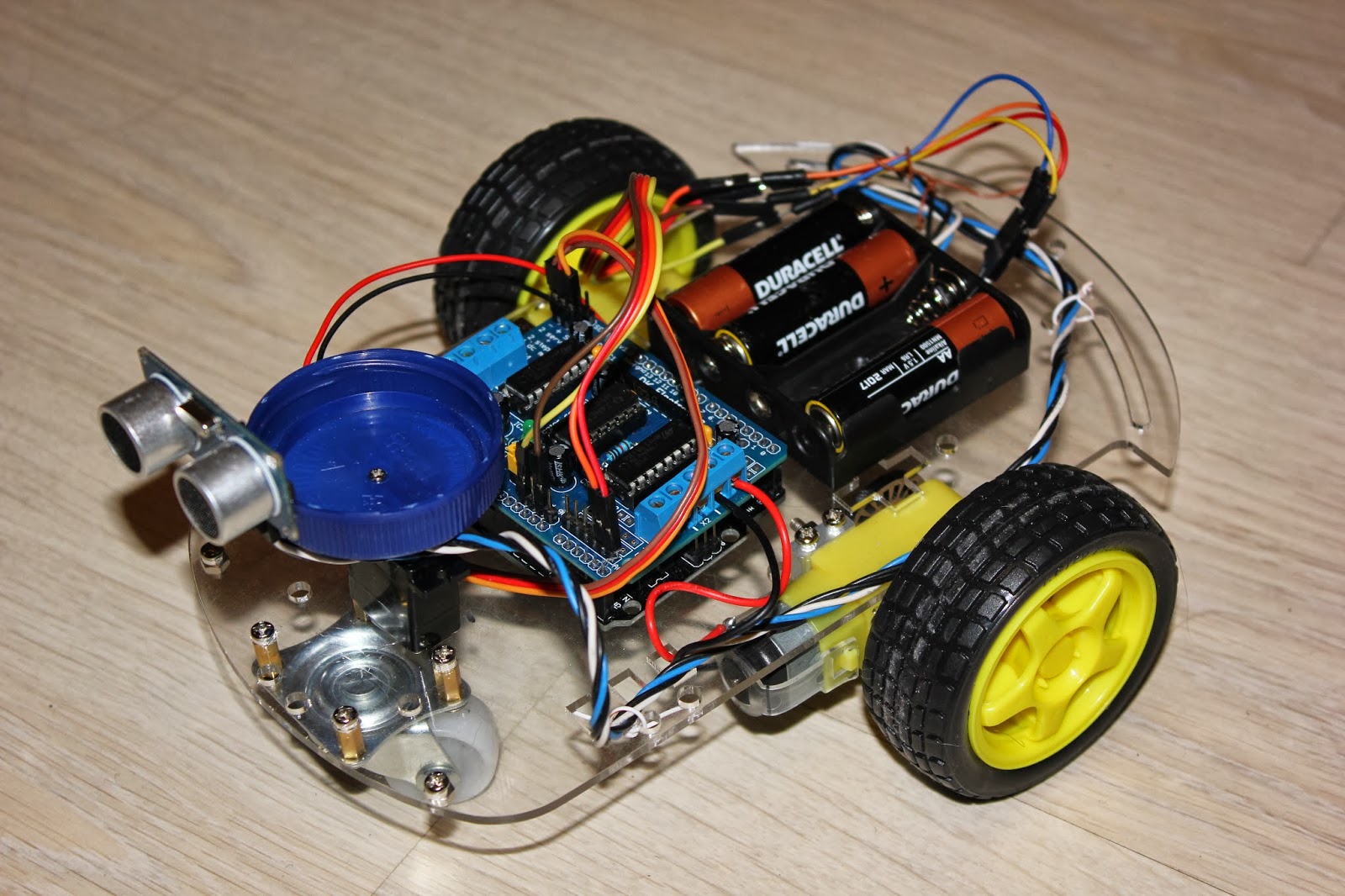
Доступно только зарегистрированным пользователям
schedule 05.01.2017 favorite_borderДоступно только зарегистрированным пользователям
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению .. schedule 20.08.2014 favorite_border
.. schedule 20.08.2014 favorite_borderДоступно только зарегистрированным пользователям
Это руководство — как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino. Для удобства представляем вам 9 шагов для более детального подхода к сборке. Что из этого получиться увидим, когда соберем эту игрушку у себя дома…
schedule 12.03.2014Доступно только зарегистрированным пользователям
DIY: Простой робот паук на Arduino и Fischertechnik. Пошаговая инструкция по созданию
Пошаговая инструкция по созданиюЕсли вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движениями является большой обучающей платформой. Основной целью этого проекта является обучение основам работы сервоприводов, их синхронизации, программированию и пониманию диапазона и силы. Результат будет очень забавным…
Доступно только зарегистрированным пользователям
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданиюSneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности.
Доступно только зарегистрированным пользователям
schedule 29.05.2013 favorite_borderДоступно только зарегистрированным пользователям
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданию Возможность сохранения пути руки позволяет пользователям принимать те же движения с помощью камеры, снятые с точностью и способностью повторного воспроизведения. 2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
Возможность сохранения пути руки позволяет пользователям принимать те же движения с помощью камеры, снятые с точностью и способностью повторного воспроизведения. 2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…Доступно только зарегистрированным пользователям
DIY: Робот-танк на основе Androidного смартфона. Пошаговая инструкция по созданиюРобот-танк на основе смартфона является отличным проектом для вас и ваших детей. Этот робот может быть построен в течение часа и не требует пайки или специальных инструментов. Когда вы закончите его сборку, просто скачайте и установите приложение EMGRobotics Audio Robot на вашем телефоне. Приложение будет использовать камеру в телефоне и различные алгоритмы компьютерного зрения, чтобы робот ездил вокруг в поисках лиц или определенных цветов.
Доступно только зарегистрированным пользователям
schedule 27.05.2013 favorite_borderДоступно только зарегистрированным пользователям
Это простой проект робо-автомобиля, который управляется через Bluetooth. Здесь используется контроллер Arduino. Для управления автомобилем используется Androidный гаджет со встроенным акселерометром. Чувствительность и значение наклона устанавливается в настройках приложения Android. Также предоставляется обычный способ управления – кнопки на экране. В дополнение ко всему можно реализовать сенсорное управление…
В дополнение ко всему можно реализовать сенсорное управление…
Доступно только зарегистрированным пользователям
DIY: FIER — четвероногий робот на основе Arduino. Пошаговая инструкция по созданиюЭтот интересный механизм называется FIER. Он представляет собой четвероногого робота, который сделан из деревянных деталей, проводков и программной системы Arduino. В этой инструкции мы продемонстрируем вам пошаговое построение этого робота со всеми подробностями. Это не сложно, нужно терпение и простые навыки работы с деревом и электроникой…
schedule 18.02.2013Доступно только зарегистрированным пользователям
В этом разделе вы можете найти схемы и проекты, что бы собрать своего arduino робота или робота на базе другого микрокомпьютера контроллера.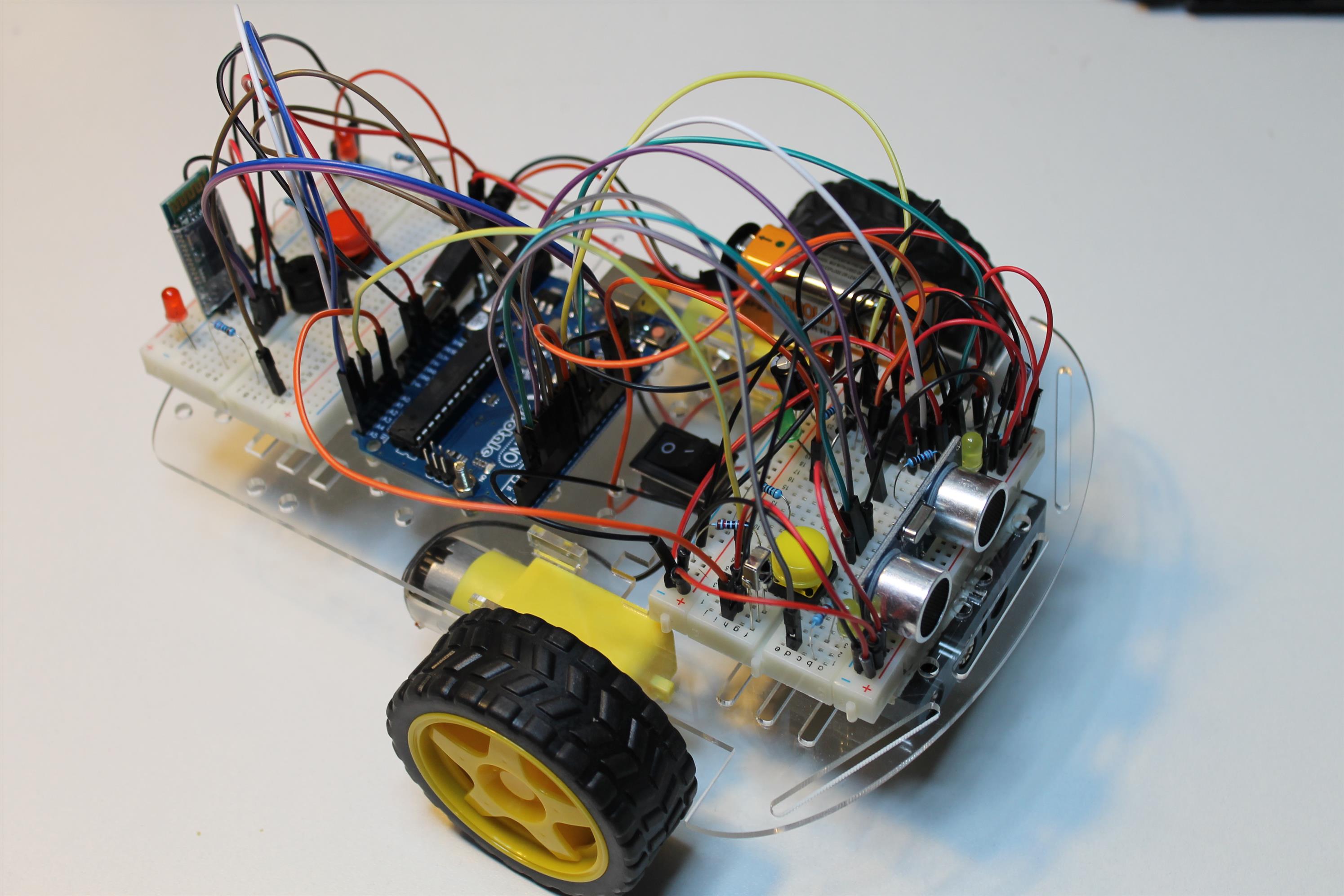 Arduino для начинающих своими руками. Примеры проектов на русском с использованием arduino, основы работы со скетчами arduino при создании ардуино робота и другое о платформе arduino на этой странице. Практическая энциклопедия для конструирования роботов на котроллере arduino. Визуальное программирование микроконтроллера, как программировать и использовать arduino в робототехнике при создании мобильных роботов.
Arduino для начинающих своими руками. Примеры проектов на русском с использованием arduino, основы работы со скетчами arduino при создании ардуино робота и другое о платформе arduino на этой странице. Практическая энциклопедия для конструирования роботов на котроллере arduino. Визуальное программирование микроконтроллера, как программировать и использовать arduino в робототехнике при создании мобильных роботов.
Так же здесь есть курсы, примеры и уроки по интерфейсу arduino, уроки ардуино на русском для начинающих. Уроки по программированию ардуино роботов, роботов на конструкторе арудино и других контроллерах для создания мобильных роботов для начинающих.
Подробные описания и пошаговые инструкции по конструированию роботов на базе контроллера ардуино. Фото и видео инструкции о том, как собрать своего ардуино робота из подручных материалов. Как собрать и запрограммировать арудино робота своими руками для себя или соревнований. Практическая энциклопедия, скетчи и примеры роботов на ардуино, которые вы сможете собрать в домашних условиях.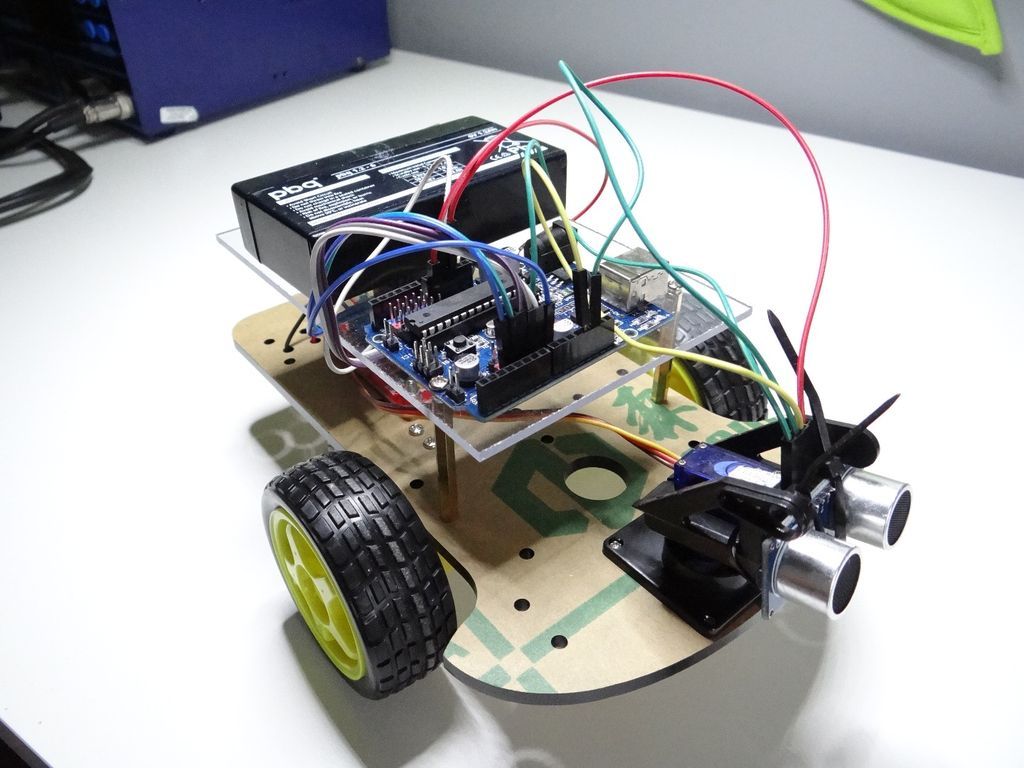
Конструктор ARDUINO Дерзай Наборы по электронике. Мобильные роботы + книга 978-5-9775-3774-2
Пожалуйста, при разговоре с менеджером, укажите код товара: 96354893
Если вы хотите научиться конструировать мобильного робота, но у вас пока нет знаний, опыта, деталей и электронных компонентов, то этот набор разработан специально для Вас. В его состав входит плата Arduino, необходимые электронные компоненты, двигатели, 4-х колесное шасси, а также популярная книга М. Момота «Мобильные роботы на базе Arduino». Вы узнаете, из каких узлов состоит простейший робот и как выполнять электрические соединения. Научитесь программировать контроллер Arduino и подключать различные датчики для взаимодействия робота с внешним миром. Изучите ходовую часть и основы управления двигателями. Узнаете, как организовать дистанционное управление роботом с помощью смартфона с операционной системой Android или с пульта дистанционного управления. ВЫ СМОЖЕТЕ:
| |
Книга M. Момота «Мобильные роботы на базе Arduino» поможет вам научиться конструировать роботов, начиная с простейших управляемых автомобилей и заканчивая более умными моделями. Вы:
| |
 Сможете собрать различных роботов, построенных на основе простой базовой модели и способных выполнять различные задачи: находить выход из лабиринта, играть в кегельринг, двигаться по компасу, ориентироваться в пространстве и др.
Сможете собрать различных роботов, построенных на основе простой базовой модели и способных выполнять различные задачи: находить выход из лабиринта, играть в кегельринг, двигаться по компасу, ориентироваться в пространстве и др.
Что такое Arduino?
Arduino — это небольшая плата с собственным процессором и памятью. На плате также есть пара десятков контактов, к которым можно подключать всевозможные компоненты: лампочки, датчики, моторы, чайники, роутеры, магнитные дверные замки и вообще всё, что работает от электричества. В процессор Arduino можно загрузить программу, которая будет управлять всеми этими устройствами по заданному алгоритму. Таким образом можно создать бесконечное количество уникальных гаджетов, сделанных своими руками и по собственной задумке. Для того, чтобы понять идею, взгляните на иллюстрацию. Она не отражает и миллионной доли всех возможностей, но всё же даёт первичное представление: На плате также есть пара десятков контактов, к которым можно подключать всевозможные компоненты: лампочки, датчики, моторы, чайники, роутеры, магнитные дверные замки и вообще всё, что работает от электричества. В процессор Arduino можно загрузить программу, которая будет управлять всеми этими устройствами по заданному алгоритму. Таким образом можно создать бесконечное количество уникальных гаджетов, сделанных своими руками и по собственной задумке. Для того, чтобы понять идею, взгляните на иллюстрацию. Она не отражает и миллионной доли всех возможностей, но всё же даёт первичное представление: | |
Сложно ли это?Свою бешеную популярность Arduino приобрела благодаря простоте и дружелюбности. Даже полный ноль в программировании и схемотехнике может освоить основы работы с Arduino за пару часов. Этому поспособствуют тысячи публикаций, учебников, заметок в интернете. Программы для Arduino пишутся на обычном C++, дополненным простыми и понятными функциями для управления вводом/выводом на контактах. Если вы уже знаете C++ — Arduino станет дверью в новый мир, где программы не ограничены рамками компьютера, а взаимодействуют с окружающим миром и влияют на него. Если же вы новичок в программировании — не проблема, вы с лёгкостью научитесь, это просто. Для удобства работы с Arduino существует бесплатная официальная среда программирования «Arduino IDE», работающая под Windows, Mac OS и Linux. С помощью неё загрузка новой программы в Arduino становится делом одного клика, только лишь подключите плату к компьютеру через USB. Хотя для более пытливых умов возможна работа и через Visual Studio, Eclipse, другие IDE или командную строку. Вам не понадобится паяльник. Полноценные устройства можно собирать, используя специальную макетную доску, перемычки и провода абсолютно без пайки. Конструирование ещё не было таким быстрым и простым. Если вы уже знаете C++ — Arduino станет дверью в новый мир, где программы не ограничены рамками компьютера, а взаимодействуют с окружающим миром и влияют на него. Если же вы новичок в программировании — не проблема, вы с лёгкостью научитесь, это просто. Для удобства работы с Arduino существует бесплатная официальная среда программирования «Arduino IDE», работающая под Windows, Mac OS и Linux. С помощью неё загрузка новой программы в Arduino становится делом одного клика, только лишь подключите плату к компьютеру через USB. Хотя для более пытливых умов возможна работа и через Visual Studio, Eclipse, другие IDE или командную строку. Вам не понадобится паяльник. Полноценные устройства можно собирать, используя специальную макетную доску, перемычки и провода абсолютно без пайки. Конструирование ещё не было таким быстрым и простым. | |
Принцип бутербродаЕщё одной отличительной особенностью Arduino является наличие плат расширения, так называемых shields или просто «шилдов». Это дополнительные платы, которые ставятся подобно слоям бутерброда поверх Arduino, чтобы дать ему новые возможности. Так например, существуют платы расширения для подключения к локальной сети и интернету (Ethernet Shield), для управления мощными моторами (Motor Shield), для получения координат и времени со спутников GPS (модуль GPS) и многие другие. Это дополнительные платы, которые ставятся подобно слоям бутерброда поверх Arduino, чтобы дать ему новые возможности. Так например, существуют платы расширения для подключения к локальной сети и интернету (Ethernet Shield), для управления мощными моторами (Motor Shield), для получения координат и времени со спутников GPS (модуль GPS) и многие другие.Так что же такое ArduinoArduino — это сердце конструктора, в котором нет конечного, определённого набора деталей, и нет ограничений в разнообразии того, что можно собрать. Всё ограничено лишь вашей фантазией. Это новый мир, убойное хобби и отличный подарок. Десятки тысяч людей в мире уже поняли это. | |
Техническое описание
- СОСТАВ НАБОРА:
- Контроллерx1 Arduino UNO R3 + кабель USB
- x1 Arduino UNO R3 + кабель USB
- Датчикиx1 Ультразвуковой дальномер HC-SR04x3 Датчик препятствияx3 Датчик линии TCRT 5000×1 Электронный компас GY-271 (HMC5883L)
- x1 Ультразвуковой дальномер HC-SR04
- x3 Датчик препятствия
- x3 Датчик линии TCRT 5000
- x1 Электронный компас GY-271 (HMC5883L)
- Элементы крепежаx1 Макетная плата малаяx40 Провода 20 см с разъемами «мама-мама»x8 Провода 20 см тонкие многожильныеx1 Выключатель питания
- x1 Макетная плата малая
- x40 Провода 20 см с разъемами «мама-мама»
- x8 Провода 20 см тонкие многожильные
- x1 Выключатель питания
- Платы расширенияx1 Плата расширения V5 (UNO Sensor Shield V5, APC220)x1 Драйвер двигателей 2-х канальный на базе L298N
- x1 Плата расширения V5 (UNO Sensor Shield V5, APC220)
- x1 Драйвер двигателей 2-х канальный на базе L298N
- Механические деталиx2 Шасси мобильного робота 4WDx4 Колесаx1 Кронштейн для установки датчика расстояния
- x2 Шасси мобильного робота 4WD
- x4 Колеса
- x1 Кронштейн для установки датчика расстояния
- Двигателиx4 Двигатели колесx1 Сервомотор аналоговый SG90
- x4 Двигатели колес
- x1 Сервомотор аналоговый SG90
- Светодиодыx5 Светодиод красныйx5 Светодиод жёлтый
- x5 Светодиод красный
- x5 Светодиод жёлтый
- Компоненты для управленияx1 Пульт управления с ИК приемникомx1 Модуль Bluetooth HC-05
- x1 Пульт управления с ИК приемником
- x1 Модуль Bluetooth HC-05
- Элементы питания, зарядное устройствоx2 Аккумуляторы литиевый типа 18650×1 Отсек для 2-х аккумуляторов типа 18650×1 Зарядное устройство для аккумуляторов
- x2 Аккумуляторы литиевый типа 18650
- x1 Отсек для 2-х аккумуляторов типа 18650
- x1 Зарядное устройство для аккумуляторов
- Базовые компонентыx5 Конденсатор 0,1 мкФx10 Резистор 220 Ом
- x5 Конденсатор 0,1 мкФ
- x10 Резистор 220 Ом
- Элементы крепежаx4 Стойки для крепления двигателейx68 Болты, гайки, шпильки
- x4 Стойки для крепления двигателей
- x68 Болты, гайки, шпильки
- Книгаx1 Момот М.
 Мобильные роботы на базе Arduino
Мобильные роботы на базе Arduino - x1 Момот М. Мобильные роботы на базе Arduino
 Мобильные роботы на базе Arduino
Мобильные роботы на базе ArduinoКомплектация
- Контролер, Кабель USB, Плата расширения (2 шт), Датчик (9 шт), Плата макетная, беспаечная на 170 контактов, Провода с разъемами «мама-мама» (40 шт), Провода с разъемами » папа-мама» (20 шт), Провода тонкие многожильные (8 шт), Выключатель питания, Конденсатор керамический 0,1 мкФ (5 шт), Резистор 220 Ом (10 шт), Двигатель (5 шт), Светодиоид (5 шт), Пульт ДУ, ИК приемник НХ 1838, Модуль Bluetooth HC-05, Аккумулятор 1400 mAh (2 шт), Батарейный блок, Зарядное устройство для аккумуляторов, Шасси (4 шт), Механические детали (23 шт), Отвертка, Ключ гаечный, Клей, Элементы крепежа (131 деталь), Инструкция по сборке, Книга М. Момота «Мобильные роботы на базе Arduino»
Полезная информация
- Страна производства из предпоследней поставки была: Россия
- Гарантия: 1 год
- Дополнительно: www.arduino.cc
- Приносим свои извинения, если комплект поставки, габариты, описание, технические характеристики, внешний вид, страна производства в описании и цвет товара оказались неточными. Производитель может изменить эти параметры без предварительного уведомления.
 Производитель может изменить эти параметры без предварительного уведомления.
Производитель может изменить эти параметры без предварительного уведомления.
Доставка по всей Беларуси:
Минск, Гомель, Гродно, Брест, Могилев, Витебск, Солигорск, Полоцк, Новополоцк, Барановичи, Белыничи, Береза, Бобруйск, Борисов, Волковыск, Воложин, Городея, Городище, Дзержинск, Житковичи, Жлобин, Жодино, Заславль, Зельва, Ивацевичи, Ивье, Калинковичи, Кобрин, Коханово, Крупки, Лельчицы, Лепель, Лида, Логойск, Лунинец, Ляховичи, Пуховичи, Марьина Горка, Мачулищи, Микашевичи, Мозырь, Молодечно, Мосты, Несвиж, Новогрудок, Озаричи, Ореховск, Орша, Осиповичи, Островец, Ошмяны, Паричи, Пинск, Речица, Рогачев, Светлогорск, Сенно, Скидель, Славгород, Слоним, Слуцк, Смиловичи, Смолевичи, Сморгонь, Старобин, Старые Дороги, Столбцы, Толочин, Уваровичи, Фаниполь, Червень, Чечерск, Шклов, Щучин + другие города и районы.
Мобильные роботы на базе Arduino + книга
✓ Контроллер
x1 Плата, совместимая с Arduino Uno R3
x1 Кабель USB
✓ Платы расширения
x1 Плата расширения V5 (UNO Sensor Shield V5)
x1 Драйвер двигателей 2-х канальный на базе L298N
✓ Датчики
x1 Ультразвуковой дальномер HC-SR04
x3 Инфракрасный датчик препятствий
x3 Датчик линии TCRT 5000
x1 Электронный компас GY-271 (HMC5883L)
x1 Модуль GY-521 3-осевой акселерометр и гироскоп MPU6050
✓ Компоненты для управления
x1 Пульт управления + ИК приемник HX1838
x1 Модуль Bluetooth HC-05
✓ Элементы коммутации
x1 Плата макетная беспаечная [170 контактов], 45×34,5×8,5 мм
x40 Провода 20 см с разъемами “мама-мама”
x20 Провода 20 см с разъемами “папа-мама”
x8 Провода 20 см тонкие многожильные
x1 Выключатель питания KCD1-101
✓ Базовые компоненты
x5 Конденсатор керамический 0,1 мкФ
x10 Резистор 220 Ом
✓ Двигатели
x4 Двигатели колес
x1 Серводвигатель MG90S 13,6 г.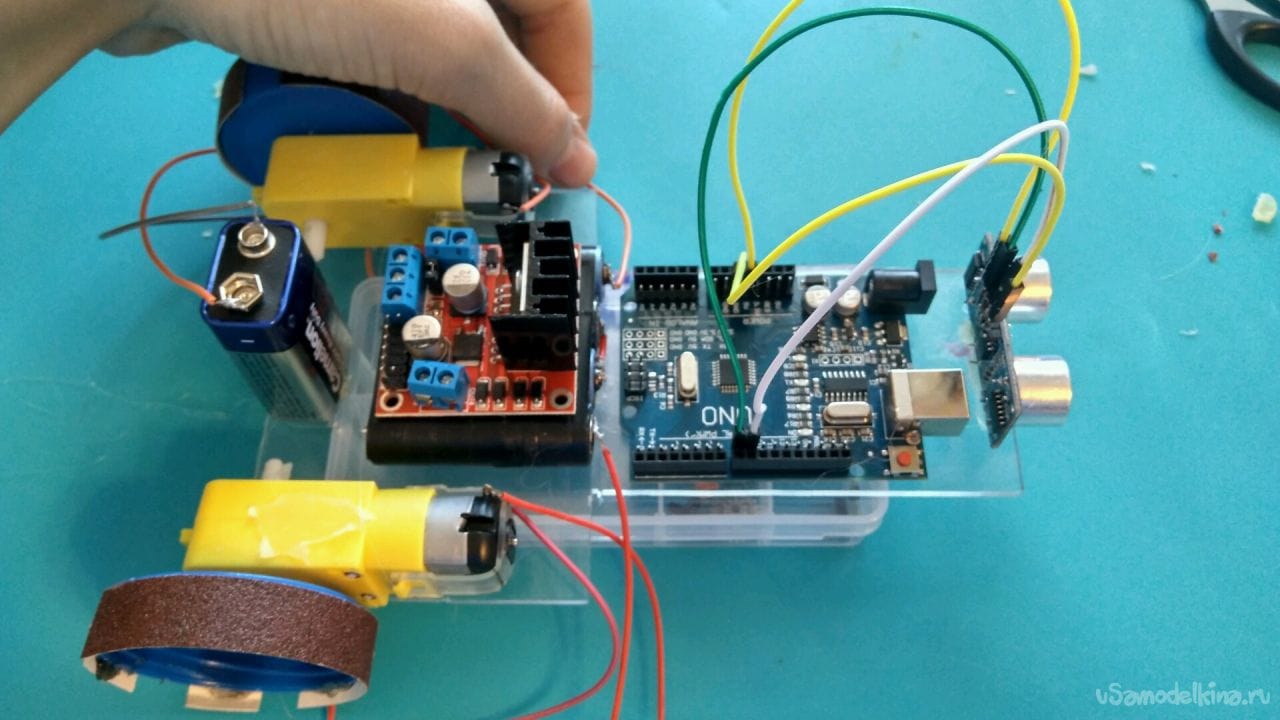 180°
180°
✓ Светодиоды
x2 Светодиод красный 5 мм
x2 Светодиод зеленый 5 мм
x2 Светодиод синий 5 мм
x2 Светодиод желтый 5 мм
✓ Элементы питания, зарядное устройство
x2 Аккумуляторы литиевый 18650 3,7 В
x1 Отсек для 2-х аккумуляторов типа 18650
x1 Зарядное устройство для аккумуляторов 18650
✓ Механические детали
x2 Шасси мобильного робота 4WD
x4 Детали для установки серводвигателя и HC-SR04
x3 Детали бампера
x8 Детали для крепления двигателей
x4 Колеса
✓ Крепеж
x10 Стойки латунные
x105 Болты, гайки
x2 Нейлоновый стяжки 2,5х100 мм
x4 Держатель для светодиодов
x3 Втулки пластмассовые
х1 Клей
✓ Инструменты
x1 Отвертка
x1 Ключ гаечный M2хM3
✓ Руководство
x1 Инструкция по сборке мобильного робота
✓ Книга
x1 Момот М. Мобильные роботы на базе Arduino (2-изд.). – СПб.: БХВ-Петербург, 2017 – 336 с.
Робот для обучения детей программированию на Arduino
Кружки робототехники в наше время определенно пользуются успехом. Лего, ардуино, скретчи и много чего еще доступно современным детям (я уверен, многие, как и я, в этом плане завидуют нынешней детворе). Будучи преподавателем робототехники, решил поделиться некоторым материалом, который у меня накопился за пару лет работы, а именно довольно простым роботом и несколькими занятиями с ним.
Лего, ардуино, скретчи и много чего еще доступно современным детям (я уверен, многие, как и я, в этом плане завидуют нынешней детворе). Будучи преподавателем робототехники, решил поделиться некоторым материалом, который у меня накопился за пару лет работы, а именно довольно простым роботом и несколькими занятиями с ним.
Данные агрегаты используется мною на занятиях для того, чтобы объяснить детям принципы работы драйвера двигателя, датчика линии и дальномера. Дети, которых настигло изучение данного робота, уже как правило отучились год и имеют минимальные представления об Arduino, моторах и электротехнике в целом. В интернете много проектов с данными комплектующими, но разработать свою машинку меня мотивировало две вещи – хотелось использовать отсек под 4 батарейки АА и иметь возможность надежно прикрепить к роботу практически любой датчик (для этого в конструкции есть несколько дополнительных крепежных отверстий).
Управляется робот платой Arduino Uno с motor shield l293d, из датчиков я ставил дальномер HC-SR04 и два датчика линии tcrt5000 (имеет как цифровой, так и аналоговый вывод).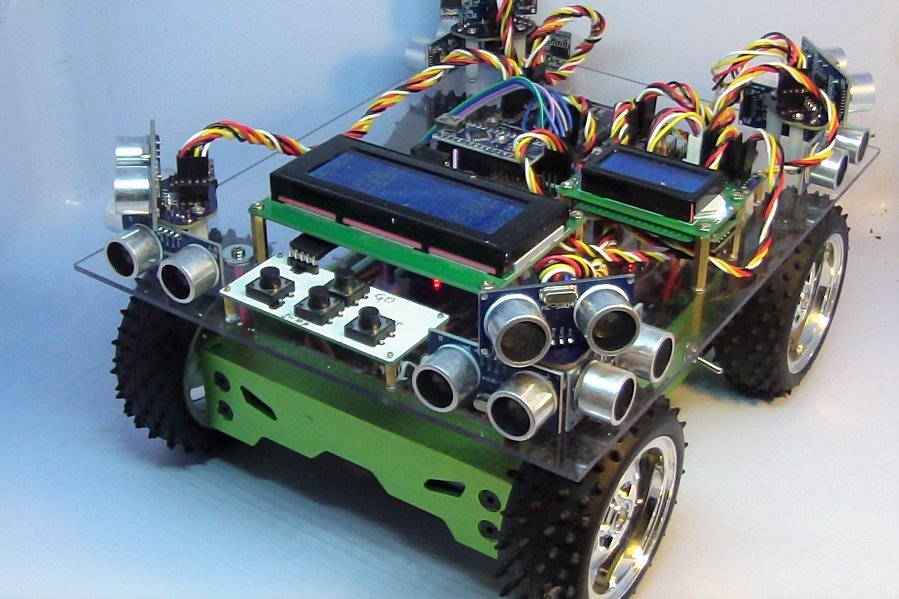
Корпус робота состоит из 3 деталей (не считая необязательных креплений под датчики), которые печатаются на 3D-принтере. Для сборки понадобится крепеж М3, все необходимые элементы я описал в документе, лежащем с файлами для 3D-принтера.
Программируется робот, как и в стандартной среде Arduino IDE (дети постарше), так и в программе miniBloq (для младших групп). Для стандартной среды используется библиотека AFMotor, которая необходима для работы с шилдом драйверов двигателя. В miniBloq-е для работы необходимо выбрать в разделе оборудование робота «ta-bot v1», использующего аналогичный драйвер.
Имея на борту дальномер и датчики линии, робот годится для участия в соревнованиях по многим дисциплинам, но создан был именно для обучения, занять призовые места с ним не получится.
Занятия, которые с ним можно провести:
- Работа с драйвером двигателей. Вращение колеса в разные стороны и с разной скоростью.
- Простые маневры. Езда по кругу, езда по восьмерке (в этих занятиях как правило приходится много раз подбирать необходимое время и скорость, чтобы получить заданную фигуру).
- Датчик линии. Принцип работы. Передача показаний датчика в компьютер (монитор порта).
- Езда по линии с одним датчиком линии.
- Езда по линии с двумя датчиками линии.
- Дальномер. Принцип работы дальномера. Передача показаний дальномера в компьютер.
- Езда по комнате с дальномером. Робот едет вперед до встречи с препятствием, как только подъезжает к стене – поворачивает.
- Поиск противника (как в робосумо). Два робота ставятся в круг и начинают крутиться на месте, выискивая дальномером противника.
В папке с деталями также можно найти несколько готовых занятий из вышеперечисленного списка.
Автор: Никита Чернов
Источник
8 роботов Arduino, которые вы можете построить менее чем за $ 125
Проекты Arduino начального уровня, хотя они могут быть образовательными, часто не так уж интересны. Создание светофора
хорош для изучения программирования, но как только вы это сделаете, его полезность закончилась.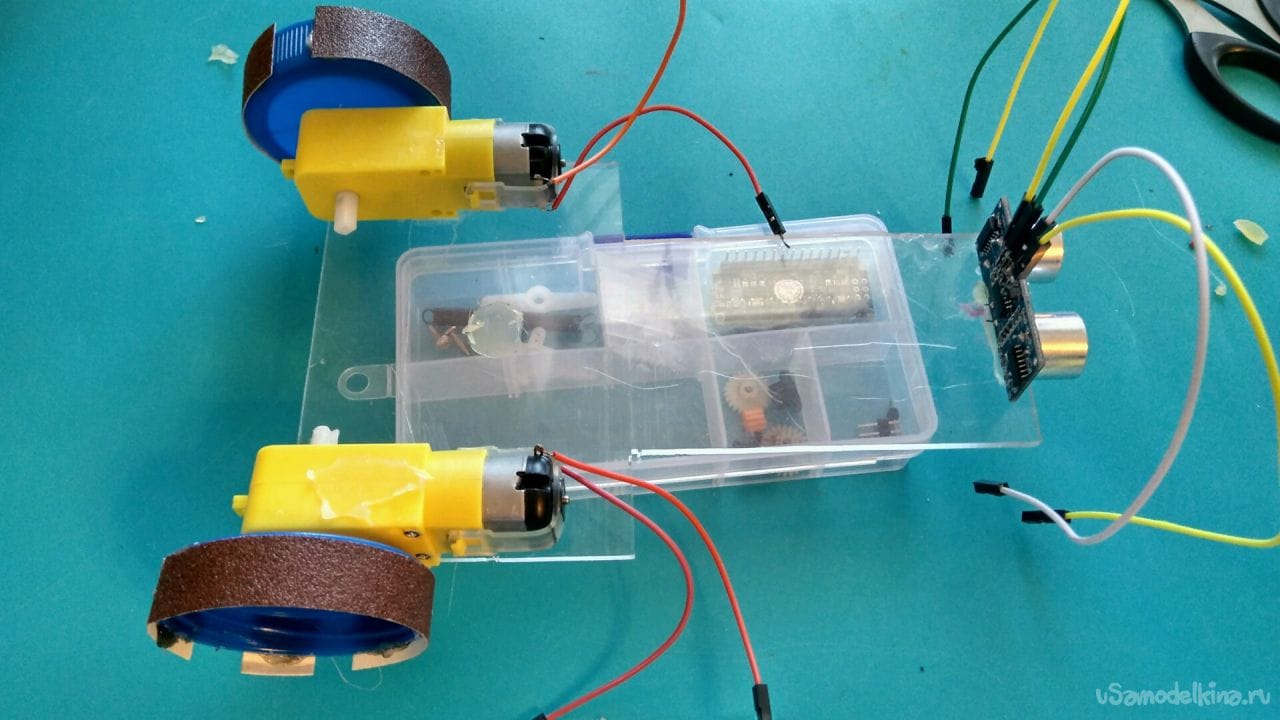 Таймер Pomodoro с питанием от Arduino
Таймер Pomodoro с питанием от Arduino
это здорово, но не все так увлекательно. Хотите заняться чем-нибудь более веселым? Попробуйте создать робота, управляемого Arduino: вот восемь доступных вариантов.
Pololu Zumo Robot Kit ($ 100 + Arduino)
Этот комплект поставляется со всем необходимым для создания программируемого робота — вам просто нужно добавить Arduino! Это роботизированная платформа с гусеничным ходом, позволяющая катиться по менее гладким поверхностям, а также шесть инфракрасных датчиков для предотвращения столкновения с предметами. Добавьте к этому бульдозерный отвал, моторы, зуммер и еще пару датчиков, чтобы робот оставался на ходу, и у вас будет отличный проект Arduino для начинающих.
,
Pololu 3pi Robot Kit ($ 100)
Робот 3pi поставляется с собственным микроконтроллером. И хотя технически это не контроллер Arduino, ATmega328 в основе устройства совместим с платформой разработки Arduino, так что вы можете практиковаться в программировании на Arduino.
с этим комплектом. Он также включает в себя ЖК-экран, так что ваш робот может отображать сообщения! Со светодиодами, зуммером, датчиками отражения и двумя независимыми моторами это отличный робот как для начинающих, так и для начинающих любителей робототехники.
MeArm Карманная роботизированная рука (50 долларов + Arduino)
Не все роботы представляют собой крошечные колесные угрозы — есть множество других вариантов! Эта рука-робот поставляется с полностью акриловой рамой и четырьмя сервоприводами; вам просто понадобится небольшая отвертка, чтобы соединить ее, и Arduino для управления ею. Возможно, вам придется провести некоторые эксперименты и поиск в Интернете, чтобы выяснить, как лучше всего его запрограммировать, но вы можете проверить статью Lifehacker о создании манипулятора, чтобы узнать, как начать работу.
Многофункциональный 4WD Robot Car ($ 47)
Хотя описание этого автомобиля-робота на AliExpress написано на русском языке, оно все же получает хорошие отзывы за то, что он забавный, простой в работе и универсальный маленький робот. В комплект входят автомобильное шасси, датчик гидролокатора для предотвращения аварий, пульт дистанционного управления для управления автомобилем и плата Arduino, что делает его очень полезным для начинающих программировать микроконтроллеры.
ArdBot ($ 19 + Arduino)
ArdBot — это базовый подвижный робот, который вы можете быстро запустить и запустить, а шасси обладает широкими возможностями расширения, поэтому у вас будет платформа, на которой вы сможете создавать и учиться гораздо большему. Оригинальный ArdBot был подробно описан в журнале Servo, но вы можете найти все, что вам нужно в этой статье от Robotoid. Он также включает в себя все номера деталей компонентов, которые понадобятся вам для движения вашего первого робота.
Робот oddWires для предотвращения препятствий ($ 80) [Больше не доступно]
Этот комплект поставляется с Arduino и моторным щитом
Таким образом, вы можете начать работу с этим простым двухколесным роботом, а затем перейти к более сложным и сложным проектам. Ультразвуковой модуль измерения расстояния не даст роботу столкнуться с чем-либо, а шасси позволяет легко устанавливать другие датчики и исполнительные механизмы. oddWires разработали этот комплект, чтобы задействовать минимальное количество пайки и межсоединений, так что это отличный набор для начинающих. (И если у вас уже есть Arduino, вы можете получить тот же комплект с моторным щитком, но без микроконтроллера, за 54 доллара.)
Базовый робот Cherokey 4WD ($ 110)
Один из более дорогих вариантов базового комплекта робота, четырехколесный Cherokey предоставляет некоторые очень интересные функции, которых вы не найдете в других начинающих роботах Arduino — в частности, тот факт, что вы можете управлять этим маленьким роботом из твой айфон. Просто скачайте приложение GoBLE, и вы должны быть готовы к работе. Говоря технически, мозг этого Cherokey исходит от платы разработки Romeo, но он совместим с Arduino, поэтому вы не почувствуете разницу. В комплект входят ультразвуковой датчик и монтажный кронштейн, но есть достаточно места для добавления дополнительных датчиков или даже манипулятора.
Джеймс (меняется)
Если идея использования набора для создания чего-либо вам не подходит, есть робот, который подойдет для вашего истинного духа «сделай сам»: познакомьтесь с Джеймсом. Этот урок от Instructables покажет вам, как взять кучу деталей, которые вы можете получить из стартового набора Arduino.
или купить по отдельности, и положить их на раму, которую вы себе порезали. Вам понадобится ленточная пила или другой электроинструмент для резки акрила, но если вы хотите это сделать, у вас не должно возникнуть проблем с остальными инструкциями.
Робототехника в ладони
С растущим интересом к робототехнике, есть много отличных вариантов для создания маленьких роботов на Arduino. И после того, как вы его построите, вы сможете расширять его с помощью большего количества датчиков, сервоприводов, устройств или более сложного кода. Возможности безграничны.
Вы построили робота Arduino? Что ты подумал? Вы бы порекомендовали комплект, который вы использовали? Поделитесь своим опытом ниже!
8 роботов Arduino, которые вы можете построить менее чем за $ 125
Проекты Arduino начального уровня , хотя они могут быть образовательными, часто не так уж интересны. Создание светофора светофора хорош для изучения программирования, но как только вы это сделаете, его полезность закончилась. Таймер таймер — это здорово, но не все так увлекательно. Хотите заняться чем-нибудь более веселым? Попробуйте создать робота, управляемого Arduino: вот восемь доступных вариантов.
Этот комплект поставляется со всем, что вам нужно для создания программируемого робота — вам просто нужно добавить Arduino! Это роботизированная платформа с гусеничным ходом, позволяющая катиться по менее гладким поверхностям, а также шесть инфракрасных датчиков для предотвращения столкновения с предметами. Добавьте к этому бульдозерный отвал, моторы, зуммер и еще пару датчиков, чтобы робот оставался на ходу, и у вас есть отличный проект для начинающих Arduino отличных проектов
Робот 3pi поставляется с собственным микроконтроллером. И хотя технически это не контроллер Arduino, ATmega328 в основе устройства совместим с платформой разработки Arduino, так что вы можете практиковаться в программировании Arduino. с этим комплектом. Он также включает в себя ЖК-экран, так что ваш робот может отображать сообщения! Со светодиодами, зуммером, датчиками отражения и двумя независимыми моторами это отличный робот как для начинающих, так и для любителей среднего уровня.
Не все роботы представляют собой крошечные колесные угрозы — есть множество других вариантов! Эта роботизированная рука поставляется с полностью акриловой рамой и четырьмя сервоприводами; вам просто понадобится небольшая отвертка, чтобы собрать его, и Arduino, чтобы управлять им. Возможно, вам придется провести некоторые эксперименты и поиск в Интернете, чтобы выяснить, как лучше всего его запрограммировать, но вы можете проверить статью Lifehacker о создании манипулятора, чтобы узнать, как начать работу.
Хотя описание этого автомобиля-робота на AliExpress написано на русском языке, оно все же получает хорошие отзывы за то, что он забавный, простой в работе и универсальный маленький робот. В комплект входят автомобильное шасси, датчик гидролокатора для предотвращения аварий, пульт дистанционного управления для управления автомобилем и плата Arduino, что делает его очень полезным для начинающих программировать микроконтроллеры.
ArdBot ($ 19 + Arduino)
ArdBot — это базовый подвижной робот, который вы можете быстро запустить и запустить, а шасси обладает широкими возможностями расширения, поэтому у вас будет платформа, на которой вы сможете создавать и учиться гораздо большему. Оригинальный ArdBot был подробно описан в журнале Servo , но вы можете найти все, что вам нужно в этой статье от Robotoid . Он также включает в себя все номера деталей компонентов, которые понадобятся вам для движения вашего первого робота.
Робот oddWires для предотвращения препятствий ($ 80) [Больше не доступно]
Этот комплект поставляется с Arduino и моторным щитом щита , чтобы вы могли начать работу с этим простым двухколесным роботом, а затем перейти к более сложным и сложным проектам. Ультразвуковой модуль измерения расстояния не даст роботу столкнуться с чем-либо, а шасси позволяет легко устанавливать другие датчики и исполнительные механизмы. oddWires разработали этот комплект, чтобы задействовать минимальное количество пайки и межсоединений, так что это отличный комплект для начинающих. (И если у вас уже есть Arduino, вы можете получить тот же комплект с моторным щитком, но без микроконтроллера , за 54 доллара.)
Один из более дорогих вариантов для базового набора роботов, четырехколесный Cherokey действительно предоставляет некоторые очень интересные функции, которые вы не найдете в других роботах Arduino новичка — в частности, тот факт, что вы можете управлять этим маленьким роботом из твой айфон. Просто скачайте приложение GoBLE, и вы должны быть готовы к работе. Говоря технически, мозг этого Cherokey исходит от платы разработки Romeo, но он совместим с Arduino, поэтому вы не почувствуете разницу. Комплект поставляется с ультразвуковым датчиком и монтажным кронштейном, но у вас есть достаточно места, чтобы добавить дополнительные датчики или даже манипулятор.
Если вам не нравится идея использовать набор для создания чего-то, есть робот, который подойдет для вашего истинного духа «сделай сам»: познакомьтесь с Джеймсом. Этот урок от Instructables покажет вам, как взять кучу деталей, которые вы можете получить из стартового набора Arduino стартовых набора стартовых набора или купить по отдельности, и положить их на раму, которую вы себе порезали. Вам понадобится ленточная пила или другой электроинструмент для резки акрила, но если вы хотите это сделать, у вас не должно возникнуть проблем с остальными инструкциями.
Робототехника в ладони
С растущим интересом к робототехнике, есть много отличных вариантов для создания маленьких роботов на Arduino. И после того, как вы его построите, вы сможете расширить его с помощью большего количества датчиков, сервоприводов, устройств или более сложного кода. Возможности безграничны.
Вы построили робота Arduino? Ваше мнение? Вы бы порекомендовали комплект, который вы использовали? Поделитесь своим опытом ниже!
Сделайте своего первого робота Arduino — Лучшее руководство для начинающих!
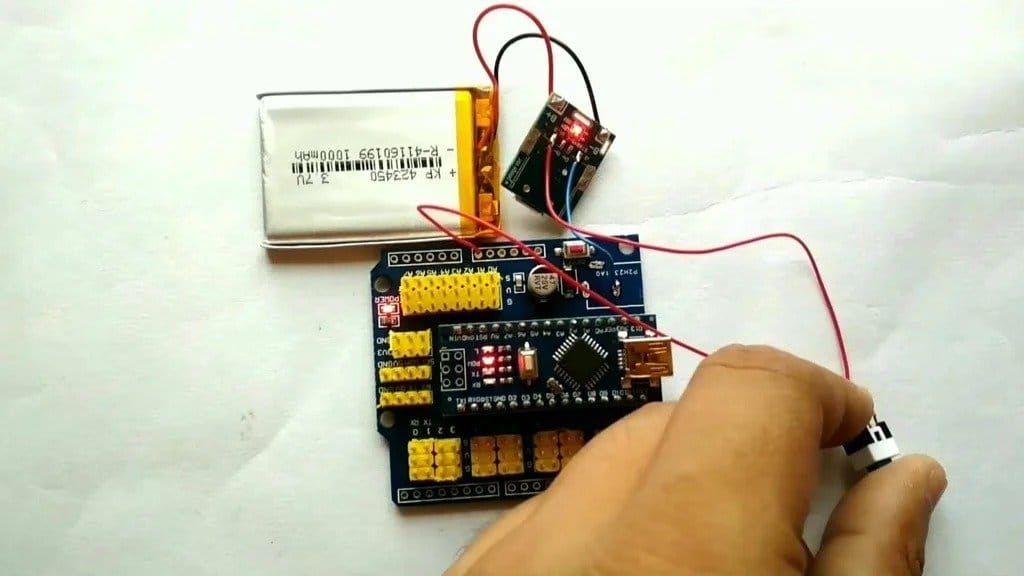
Если вы новичок в Arduino и у вас есть план по созданию своего первого робота, то вот руководство для вас. Посмотрите на изображения того, что вы собираетесь построить сегодня.
В этом уроке я покажу, как создать робота Arduino с различными функциями. Мы можем научиться использовать разные программы для различных функций, в основном робота, управляемого смартфоном, с функцией избегания препятствий, слежением за стеной и решателем лабиринта.Или вы также можете сделать это только для одной функции.
увидеть это в действии
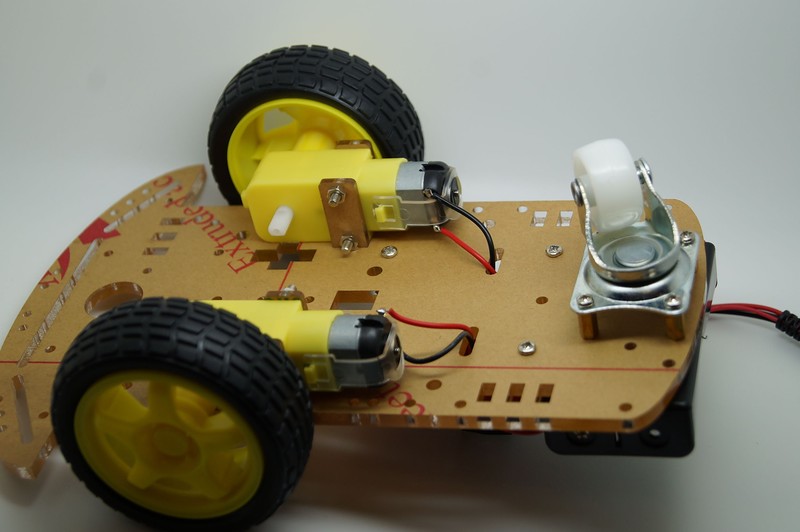
Автономная функция Материалы и инструменты Шаг 2: Изготовление шасси
Просверлите два отверстия для двигателя:
Соедините два двигателя:
Сделайте три отверстия для роликового колеса:
Подсоедините роликовое колесо:
Сделайте два отверстия с каждой стороны коробки для подключения двигателей и три отверстия в нижней части для подключения роликового колеса после измерения и маркировки правильного диаметра.Затем установите моторы и ролик.
АккумуляторыПодключение аккумуляторов.
Схема подключения.
Приклейте батарейки внутрь коробки.
Установите две 9-вольтовые батареи в коробку над роликом. Затем подключите их параллельно и подключите переключатель, как показано на схеме выше.
Подключение Arduino и Motor ShieldПрикрепите моторный щит над Arduino.
Подсоедините провода аккумулятора к клеммам PWR щитка двигателя.
Подключите двигатели к моторному щиту.
Снимите перемычку с этого порта.
Подключите моторный щит над Arduino и поместите его над батареей. Затем подключите провода от моторов и АКБ к моторному щиту. Перед подключением ознакомьтесь со схемой подключения, так как это очень важно.
Инструкции по подключению:
- Подключите левый двигатель к «M1» моторного щита
- Подключите правый электродвигатель к «M3» моторного щита
- Подключите провод от аккумулятора к «ext pwr» моторный щит
Не забудьте снять перемычку с «pwr» моторного щита.Сделайте два отверстия и включите Arduino
. Отметьте место, чтобы проделать отверстия.
Сделайте отверстия.
Подсоедините зажим аккумулятора к штекерному разъему постоянного тока на 9-вольтовой батарее.
Поместите эту 9-вольтовую батарею в коробку.
Сделайте два отверстия для доступа к USB-порту и входному порту постоянного тока Arduino. Возьмите еще одну 9-вольтовую батарею и подключите зажим к адаптеру штекерного разъема постоянного тока, затем подключите штекер постоянного тока к входному порту постоянного тока Arduino для питания Arduino. Затем поместите батарею между двигателями и Arduino внутри коробки.
Подключение модуля Bluetooth и коммутатораПодключите модуль Bluetooth к Arduino, как показано на схеме подключения, и поместите его в коробку.Затем проделайте отверстие для установки переключателя на задней стороне коробки и подсоедините переключатель (здесь я поменял переключатель, который использовался ранее из-за некоторых проблем с пайкой).
Инструкция по подключению модуля Bluetooth:
- «TX» модуля Bluetooth переходит к «RX» Arduino
- «RX» модуля Bluetooth переходит к «TX» Arduino
- «VCC» модуля Bluetooth идет к «5v» Arduino
- «GND» модуля Bluetooth переходит к «GND» Arduino
- Контакты состояния и ключа модулей BT остаются неиспользованными.
Возьмите ультразвуковой датчик, приклейте к нему небольшой пластиковый кусок L-образной формы и приклейте его поверх пластиковой коробки (или, если у вас нет клеевого стержня, используйте двусторонний Лента). Затем подключите перемычки, как показано на схеме выше.
Инструкция по подключению ультразвукового датчика:
- «VCC» ультразвукового датчика переходит к «+5» Arduino
- «GND» ультразвукового датчика переходит к «GND» Arduino
- Контакт «Триггер» ультразвукового датчика идет к «Аналоговому контакту 1» Arduino
- Контакт «Эхо» ультразвукового датчика идет к «Аналоговому контакту 0» Arduino
. Теперь мы закончили все подключения, и это время программировать.
Последний шаг — коды Arduino и редактирование приложения BluetoothЗагрузите « Final Sketch », указанный в разделе кода. Если вы столкнулись с какой-либо ошибкой, убедитесь, что вы установили библиотеку AFmotor.
Теперь мы узнали, как легко программировать Arduino. Я показал здесь несколько программ, позволяющих использовать этого робота в качестве робота, избегающего препятствий, слежения за стеной и управления через Bluetooth. и, наконец, я объединил эти три функции вместе. Посмотрите видео для получения дополнительной информации и подробностей.
Обязательно установите библиотеку AFmotor в Arduino.Скачайте библиотеку AFmotor. Чтобы установить библиотеку Arduino, обратитесь к этой странице.Приступая к работе с приложением Bluetooth
Немного повеселитесь с помощью Wall Follower и предотвращения препятствий
Посетите мой блог здесь — robotechmaker.com
Если у вас есть какие-либо вопросы или предложения, прокомментируйте их ниже.
Arduino — Робот
Начало работы с роботом Arduino
Это устаревший продукт.
С помощью робота Arduino вы можете узнать об электронике, механике и программном обеспечении. Это крошечный компьютер на колесах. Он поставляется с рядом примеров проектов, которые вы можете легко воспроизвести, и это мощная робототехническая платформа, которую вы можете взломать для выполнения всевозможных задач.
Робот имеет большое количество входов; два потенциометра, пять кнопок, цифровой компас, пять датчиков пола и устройство для чтения SD-карт. Он также имеет динамик, два двигателя и цветной экран в качестве выходов.Вы можете управлять всеми этими датчиками и исполнительными механизмами через библиотеку роботов.
На роботе есть две разные платы: плата управления (вверху) и плата двигателя (внизу). Если вы только начинаете заниматься электроникой и программированием, вам следует поработать с платой управления. По мере того, как вы набираетесь опыта, вы можете повозиться с Motor Board.
Плата управления роботом
Плата мотора робота
Настройка робота
Когда вы впервые открываете робота, вам нужно настроить пару вещей, прежде чем он будет готов к работе.
Сначала вам нужно вставить SD-карту в слот на задней стороне экрана TFT, а затем вставить экран в разъем на плате управления робота. Экран должен быть ориентирован так, чтобы синий текст с надписью «SD Card» находился рядом с кнопками и динамиком.
Как только это будет на месте, вам нужно будет прикрепить защитную крышку к нижней плате. Это поможет предотвратить повреждение моторной платы любыми объектами на земле. Прикрепите защитное покрытие к нижней части робота, как показано ниже.
Содержимое SD-карты
SD-карта используется для хранения информации, которую может прочитать робот. Он поставляется с предварительно загруженными изображениями и звуковыми файлами, используемыми в примерах Explore . Освоившись с функциями робота, вы сможете добавлять свои собственные файлы. Если вы когда-нибудь случайно удалите файлы, используемые в эскизах исследования, вы можете скопировать их из каталога SDcontent в библиотеке роботов. Или вы можете скачать файлы здесь.
Подключение робота к компьютеру
На каждой плате робота есть микроконтроллер, который программируется независимо от других.Рекомендуется программировать плату управления (верхнюю плату) только до тех пор, пока вы не ознакомитесь с функциями робота. Плата мотора (нижняя плата) имеет стандартную прошивку, которая подходит для большинства приложений общего назначения.
Подключите плату управления к компьютеру с помощью кабеля USB.
После подключения платы загорится зеленый светодиод, помеченный как PWR на плате управления. LED1 под ним несколько раз мигнет. На плате двигателя также должны гореть красные светодиоды, обозначенные как от LED1 до LED5 (сторона, противоположная переключателю питания).
Если светодиоды на любой плате не загораются, проверьте, подключен ли плоский 10-контактный кабель связи рядом с выключателем питания к обеим платам.
Установка драйверов
OSX
- При первом подключении робота к компьютеру под управлением OSX запускается «Помощник по настройке клавиатуры». С роботом нечего настраивать, поэтому вы можете закрыть этот диалог, нажав красную кнопку в верхнем левом углу окна.
Окна
Следующие инструкции предназначены для Windows 7.Они действительны также для Windows XP с небольшими различиями в диалоговых окнах.
- Подключите плату и дождитесь, пока Windows начнет процесс установки драйвера. Если установщик не запускается автоматически, перейдите в Диспетчер устройств Windows (Пуск> Панель управления> Оборудование) и найдите список роботов Arduino. Щелкните правой кнопкой мыши и выберите Обновить драйвер .
- На следующем экране выберите «Искать на моем компьютере драйверы» и нажмите Далее .
- Нажмите кнопку Обзор … . Появится еще одно диалоговое окно: перейдите в папку с только что загруженным программным обеспечением Arduino. Выберите папку drivers и нажмите OK , затем нажмите Next .
- Вы получите уведомление о том, что плата не прошла тестирование логотипа Windows. Нажмите кнопку Все равно продолжить .
- Через несколько секунд появится окно с сообщением, что мастер завершил установку программного обеспечения для Arduino Robot.Нажмите кнопку Close .
Linux
Нет необходимости устанавливать драйверы для Linux. (Проверено с Ubuntu 12.04)
Привет, пользователь!
Робот Arduino поставляется с предварительно загруженным приложением, которое запрашивает ваше имя, как вы хотите назвать робота и где вы находитесь. Посмотрите на экран робота, чтобы узнать, как вводить информацию с помощью кнопок и потенциометра.
Робот можно питать от 4 батареек AAA или подключить кабель USB к двигателю или плате управления.
После завершения процесса настройки робота вы можете начать писать свои собственные программы для управления им.
Загрузка тестового скетча
Чтобы запрограммировать робота, подключите плату управления к компьютеру через USB. Откройте IDE Arduino и загрузите скетч, расположенный в File> Examples> Robot_Control> learn> MotorTest.
Вам нужно сообщить IDE, на какую плату Arduino вы нацеливаетесь с помощью своего программного обеспечения, поэтому откройте меню Tools> Board и выберите Arduino Robot Control .
IDE Arduino должна знать, к какому из ваших USB-портов подключен робот. В меню «Инструменты »> «Последовательный » перечислены доступные порты.
- Если отображается только один элемент, щелкните по нему.
- Если отображаются два или более, вы можете отключить плату управления и снова открыть меню; исчезнувшая запись должна быть роботом. Снова подключите плату и выберите этот последовательный порт.
Нажмите кнопку «Загрузить» в верхнем левом углу окна IDE.Подождите несколько секунд — на плате должны мигать светодиоды RX и TX. Если загрузка прошла успешно, появится сообщение «Готово». появится в строке состояния программы. Как только это появится, вы можете отключить робота от USB-кабеля.
С батареями в роботе, включите выключатель питания и положите его на землю. Робот должен показать вам несколько основных движений. Поздравляю! Вы запустили робота и запустили его.
Если робот не движется, выключите питание.Подключите моторную плату к компьютеру с помощью кабеля USB. Загрузите скетч File> Examples> Robot_Motor> Robot_Motor_Core в IDE и выберите Arduino Robot Motor в меню Boards . Загрузите этот скетч, отключитесь от компьютера и попробуйте снова его включить.
Примечание. Если после подключения робота последовательный порт не отображается и перезапуск IDE / отключение-повторное подключение робота не помогает, выполните следующие действия:
- Откройте очень простой скетч, например Blink или BareMinimum
- Нажмите кнопку загрузки
- Когда в строке состояния отображается «Загрузка… «, дважды нажмите кнопку сброса на плате управления.
- Последовательный порт должен отображаться как обычно.
Перемещение робота
Этот эскиз многократно перемещает робота вперед и назад.
Каждый раз, когда вы пишете код для робота, обязательно включайте
Нет необходимости инициализировать объект Robot.
Чтобы заставить колеса двигаться, вызовите робота.motorsWrite (). motorsWrite () требует 2 аргумента: скорость левого мотора и скорость правого мотора. Эти значения находятся в диапазоне от -255 до 255, где -255 — полный задний ход, а 255 — полная скорость вперед. Если вы передадите значение 0, мотор перестанет вращать колесо.
После загрузки скетча отсоедините USB-кабель от робота. Когда USB подключен, двигатели робота отключаются. Включите питание и смотрите, как он двигается!
# включить void setup () {
Robot.begin (); // инициализировать библиотеку
}
void loop () {
// двигаться вперед на одну секунду
Robot.motorsWrite (255,255);
задержка (1000);
Robot.motorsWrite (0,0); // остановка движения
delay (1000);
// двигаться назад на одну секунду
Robot.motorsWrite (-255, -255);
задержка (1000);
Robot.motorsWrite (0,0); // остановка движения
delay (1000);
}
Прочтите кнопки
Вы напишете эскиз, который будет печатать нажатия кнопок на экране.
Во-первых, вам нужно включить библиотеку роботов.
# включить
В настройках () запустите робота и экран.
void setup () {
Robot.begin ();
Robot.beginTFT ();
}
В цикле () каждые 100 мс считывайте состояние кнопок. Если кто-то нажимается, напишите имя на экране.
void loop () {
Robot.debugPrint (Robot.keyboardRead (), 10, 10);
задержка (100);
}
В папке explore примеров роботов есть эскиз под названием Logo , который объединяет этот пример с движением робота сверху.
Измените скорость двигателя с помощью потенциометра
Это позволяет вам контролировать скорость, с которой робот движется по прямой линии. Поворачивая ручку и отображая значения от -255 до 255, вы устанавливаете скорость и направление (вперед или назад) робота.
Во-первых, вам нужно включить библиотеку роботов.
# включить
В setup () необходимо вызвать Robot.begin () для инициализации функций робота.Также вызовите Robot.beginTFT () , чтобы инициализировать экран.
Robot.begin ();
Robot.beginTFT ();
}
В петле () считайте значение потенциометра с помощью Robot.knobRead () . Сопоставьте его значение (число от 0 до 1023) от -255 до 255. Выведите это значение на экран и используйте его для изменения скорости двигателей.
void loop () {
int val = map (Robot.knobRead (), 0,1023, -255,255);
Робот.debugPrint (val);
Robot.motorsWrite (val, val);
задержка (10);
}
Двигатель робота отключается при подключении через USB. После программирования робота отключите USB-кабель и вставьте батарейки. Включите выключатель питания и наблюдайте за движением робота. Поймайте робота и поверните ручку, чтобы изменить его скорость.
Шумить
Робот может издавать звуки двумя разными способами. Есть простой звуковой сигнал, но робот также может создавать более сложные звуки, считывая последовательность музыки с SD-карты.В этом примере вы начнете с звукового сигнала. Чтобы узнать о более сложном воспроизведении, см. Пример Melody в папке learn .
Во-первых, вам нужно включить библиотеку роботов.
# включить
В setup () необходимо вызвать Robot.begin () для инициализации функций робота. Также вызовите Robot.beginSpeaker () , чтобы инициализировать динамик.
void setup () {
Робот.начинать();
Robot.beginSpeaker ();
}
В цикле () вы можете вызвать Robot.beep () , чтобы создать звуковой сигнал. Есть три различных типа звуковых сигналов; простой сигнал, двойной сигнал и длинный сигнал.
void loop () {
Robot.beep (BEEP_SIMPLE);
задержка (1000);
Robot.beep (BEEP_DOUBLE);
задержка (1000);
Robot.beep (BEEP_LONG);
задержка (1000);
}
Следующие шаги
С роботом можно делать много вещей.Несколько примеров на этой странице не передают это должным образом. Чтобы увидеть несколько более сложных примеров того, что может делать робот, посмотрите на эскизы, найденные в папке Explore примеров роботов. Это более полные примеры, которые показывают вам несколько различных приложений для робота.
Вам необходимо откалибровать модуль компаса робота, чтобы он вращался плавно. Если вы используете старую модель с Honeywell HMC 6352, вы можете обратиться к этому руководству: Калибровка компаса
Чтобы узнать больше о функциях конкретных входов и выходов робота, просмотрите папку learn в примерах роботов.
Обязательно посетите страницу библиотеки робота и страницу оборудования для получения дополнительной информации о технических аспектах робота.
Текст руководства по началу работы с Arduino находится под лицензией Лицензия Creative Commons Attribution-ShareAlike 3.0. Примеры кода в руководстве опубликованы в открытом доступе.
19 потрясающих роботов, которые можно построить с помощью Arduino
С Arduino можно реализовать практически любой проект, который только можно вообразить. На этот раз я составил список из 19 различных роботов, построенных на Arduino.Некоторые из них действительно просты, другие немного продвинуты. Итак, приступим:
1. Робот-аниматор Cat Laser
Бесконечное развлечение для вашей кошки. Развлеките свою кошку этим лазерным роботом. Он очень дешев и прост в сборке, требует всего два сервопривода, лазер и Arduino. Попробуйте это со своей кошкой. Знайте, как это сделать здесь.
2. Шахматный роботЭтот шахматный робот спроектирован таким образом, что может дотянуться до всех 64 блоков.Игра начинается с хода игрока, а затем этот ход воздействует на сенсоры. Наконец, контроллер определит движение игрока и скажет роботу, куда двигаться — читайте здесь.
3. Робот для лазания по деревьям
Робот, лазающий по деревьям. Этот проект — большая инженерная работа. Если вы хотите попробовать или вдохновитесь на другие связанные проекты, не стесняйтесь взглянуть на этот проект.
4. Машина для мыльных пузырей
Эта автоматическая машина для производства пузырей обещает понравиться как детям, так и взрослым.Также с этой машиной ваша кошка получит бесконечное удовольствие. См. Подробности создания этого проекта здесь.
5. Робот для рисования
Этот робот был построен по мотивам рисунков мандалы. Создайте собственное произведение искусства, используя этот тип робота. Узнайте больше о том, как его построить здесь.
6. Двуногий робот-гуманоид
Помимо простоты, этому двуногому роботу требуется всего четыре микро-серводвигателя, Arduino и макет. Вы можете легко добавить датчики и другие детали, чтобы сделать своего робота более крутым и сложным.Знайте, как сделать здесь простого двуногого гуманоидного робота.
7. Робот с дистанционным управлением
Этого робота с дистанционным управлением можно перемещать с помощью почти любого пульта дистанционного управления, например, пульта от телевизора. Это возможно, потому что у этого робота есть ИК (инфракрасный) приемник, который может воспринимать ИК, излучаемые пультом дистанционного управления. Попробуйте, см. Инструкции здесь.
8. Робот-пылесос
С этим роботом вам не нужно мыть пол.Он очистит его за вас. Попробуйте этого робота-пылесоса для пола, который использует моторный щит и управляется Arduino. Ознакомьтесь с инструкциями здесь.
9. Роботизированный барабан
Этот роботизированный барабан использует Arduino для управления двумя палочками. Все биты записываются прямо в программе Arduino. Если у вас есть группа, но нет барабанщика, вы можете создать своего собственного барабанщика. Довольно потрясающе. Узнайте больше об этом проекте здесь.
10.Многоцелевой бот
Это многофункциональное устройство выполняет несколько различных задач. Он перемещается с помощью 3 ИК-переключателей, играет в прятки, выбирает пути, обеспечивает звуковую и визуальную обратную связь через зуммер, ЖК-дисплей и многое другое. Это отличный проект, чтобы узнать больше о датчиках. См. Все подробности этого проекта здесь.
11. Балансировочный робот
Этот балансировочный робот работает по тому же принципу, что и Segway. Он ускоряет и замедляет колеса, чтобы удерживать систему в вертикальном положении.Этот принцип находит множество применений в нескольких проектах. Здесь вы можете ознакомиться с основными сведениями о балансировочном роботе.
12. Колесный робот Mecanum
Этот автомобиль, как робот, движется в четырех направлениях без скручивания благодаря своим уникальным колесам. Вы можете купить полный комплект для сборки своего колесного робота Mecanum. Посмотрите на этого механического колесного робота, управляемого через Bluetooth.
13. Робофиш (на самом деле плавает в воде)
Robofish — это робот-рыба, который плавает и распознает края аквариума, а также препятствия.Это простой проект с серводвигателями, инфракрасными датчиками и Arduino. Посмотрите здесь все шаги, чтобы построить вашу рыбу.
14. Клавиатура электронного фортепиано с предустановленными композициями
Это действительно забавный проект с пьезозуммером и переключателями. Эта фортепианная клавиатура имеет 7 клавиш фортепиано и кнопку 8 и для доступа к меню предустановленных песен. Попробуйте этот проект и адаптируйте его для воспроизведения ваших любимых песен.
15. Макей
Макей — автономный робот, который следует за объектами и избегает препятствий.Он использует двигатели постоянного тока для питания каждого из 2 ведущих колес. Более подробную информацию о makey и о том, как его создать, можно найти здесь.
16. Самополивающаяся установка
Это очень полезный и простой проект, который идеально подойдет вам, если вы часто забываете поливать растения. В этом проекте используются водяной насос, управляемый Arduino, резервуар для воды и датчик почвы. Вот инструкция.
17. Квадрокоптер
Квадрокоптеры — это круто! Соберите все инструменты и начните собирать свой квадрокоптер.Вероятно, вам нужно будет изучить несколько примеров и адаптировать каждый для создания нужного квадрокоптера. Вот хороший пример.
18. Робот со странным глазом
Этот странный робот был построен с использованием стартового набора Arduino. Подробнее см. Здесь.
19. Arduino Wireless Animatronic HandЭта рука робота имитирует движения человека. Пользователь носит перчатку управления, которая точно управляет рукой аниматроника. Довольно круто! Узнайте здесь, как это сделать.
Заключение
Какой ваш любимый робот? Что вы планируете строить дальше?
Оставьте комментарий внизу!
Поделитесь этим постом с другом, который тоже любит электронику.
Спасибо за чтение,
Руи
П.С. Вот еще одно сообщение в блоге, посвященное модулям Arduino: «21 модуль Arduino, который можно купить менее чем за 2 доллара».
Простое движение робота с использованием Arduino
В этой статье мы увидим, как создать простого робота, который будет перемещаться в соответствии с нашими командами.Это достигается драйвером двигателя L293D и Arduino.
Требования
- Arduino UNO
- Мотор-редукторы
- Шасси робота
- Провода
- Драйвер двигателя L293D
Принципиальная схема
Выполните подключения согласно принципиальной схеме.L293D — это драйвер двигателя, который используется для преобразования сигналов низкого уровня от Arduino в сигналы высокого уровня для двигателя.Движение настраивается выбором серийного монитора. Одна простая концепция — это вращение двигателей в другом направлении из-за различий в подключении проводов. Вышеупомянутое используется в качестве основного принципа драйверов двигателя L293D, где небольшие сигналы от Arduino направляют выходное внешнее напряжение, обеспечиваемое батареей, на L293D.
- Откройте программное обеспечение Arduino.
- Инициализируйте кодировки в настройке void, объявив выводы двигателя для 2 двигателей.Для одного двигателя мы должны использовать 2 контакта Arduino. Один используется для движения вперед, а другой — для движения назад.
Использование условных операторов используется для кодирования движения движения бота. При движении вперед оба колеса работают одновременно, а для движения вправо и влево работает один двигатель. Один работающий двигатель будет тянуть бота в одном направлении, что приводит к движению влево или вправо.
- Загрузите компилятор, загрузите кодировку и откройте монитор последовательного порта.
- На выходе будет движение бота.
В этой статье мы узнали, как создать простого робота, который может перемещаться в соответствии с нашими командами. Если мы нажмем 1 на серийном мониторе, будет обнаружено движение вперед. Аналогично, нажмите 2 для движения назад, нажмите 3 для движения влево, нажмите 4 для движения вправо и нажмите 5 для остановки.
Как построить простого робота с Arduino и 3D-принтером
Как построить робота за 5 простых шагов : Создать робота и заставить его выполнять то, что вы хотите, легко и весело! Большинство людей хотят видеть, как робот выполняет простые задачи, например, передвигается или реагирует на простые команды.Вы можете сделать робота полностью из простых деталей своими руками или купить стартовый набор своими руками с нуля!
STEM техника
Создание собственного робота — отличный способ научиться как электронике, так и программированию, детям рекомендуется совершенствовать свои методы решения проблем. Stem Toys — это игрушки на основе науки, технологий, инженерии и математики , ориентированные на обучение, любознательность и образование.
Сколько стоит самодельный робот?Стоимость зависит от сложности робота, любительский робот может стоить от 30 до 100 долларов.Новая промышленная робототехника может стоить от 50 до 80 тысяч долларов. После добавления периферийных устройств, ориентированных на конкретное приложение, система robot стоит от 100 000 до 150 000 долларов
Шаг 1. Выберите задачу, которую должен выполнять ваш робот:
Если ваш робот должен передвигаться, вам понадобится несколько моторов и колес, контроллер для моторов и микроконтроллер в качестве мозга. Батарея и датчики расстояния — это основа для такого робота.
Вот несколько примеров:
Простой робот, избегающий препятствий, использующий нано- и ультразвуковой датчик Arduino:
Принципиальная схема робота для обхода препятствий, использующего Arduino и ультразвуковой датчикНайдите код здесь: 2wd_Obstacle-Avoiding-Robot
Advanced — Контролируемая карта Bluetooth с использованием Arduino и ультразвукового датчика
Схема подключения H-моста-датчика-HC-SR04-и-модуля Bluetooth-HC-05-кНайдите здесь код: ArduBlueBot v.1
Шаг 2 — Соберите компоненты
Список компонентов для проекта типового робота включает следующее:
- Arduino Uno R3 / Мега / Нано
- Ультразвуковой датчик дальности — HC — SR04
- Микросхема драйвера двигателя — L293D Серводвигатель
- (Tower Pro SG90)
- Оргстекло / пластик / деревянный корпус
- Колеса
- Блок питания / аккумулятор
Не можете найти запчасти? Купите роботизированные комплекты!
Шаг 3. Соберите своего робота
Шаг 4. Настройте компьютер и кодирование
1.Установите Arduino IDE
2. Установите зависимые библиотеки
3. Плагин Arduino в ваш компьютер
4. Загрузите и установите драйвер Arduino (если вы используете драйверы Ch5030, загрузите отсюда)
5. Выберите Инструменты> Плата> Arduino
.7. Выберите Инструменты> Порт> и убедитесь, что новый порт появится при подключении вашего Arduino к ПК.
6. Убедитесь, что вы можете загрузить код
Шаг 5. Закодируйте своего робота
Отлично, теперь вы можете программировать своего робота!
Загрузите этот код в Arduino
Бонус — распечатайте корпус робота на 3D-принтере!tinkercad-robot-design
TinkerCAD похож на «Майнкрафт» для моделирования : Tinkercad прост в использовании, прост и позволяет напрямую работать с STL (для 3D-печати).Программное обеспечение запускается онлайн с вашей личной учетной записью в «облаке». Мы рекомендуем это молодым людям, которые хотят создавать и печатать свои творения!
Ищете хорошую 3D-печать? Проверьте эти модели:
Самые популярные роботы 2021 года (реклама):
Создание роботов и устройств Arduino
Уже много лет люди совершенствуют свои инструменты, изучают силы природы и ставят их под контроль, используя энергию природы для работы свои машины.Прошлый век отмечен созданием машин, которые могут управлять другими машинами. Сегодня создание устройств, взаимодействующих с физическим миром, доступно каждому.
Arduino Robot 4WR — Hackster.io
Привет, ребята! Надеюсь, вам уже понравился мой предыдущий учебник «ЭЛЕКТРОННОЕ РОЖДЕСТВЕНСКОЕ ДЕРЕВО», и вы готовы к новому, как обычно, я сделал это руководство, чтобы помочь вам шаг за шагом, пока вы создаете своего собственного робота, и чтобы начать изучать, как создаются управляемые роботы и как ими управлять, этот проект может стать отличным началом в мире робототехники.
Во время создания этого проекта мы постарались сделать так, чтобы это руководство было для вас лучшим руководством, которое поможет вам, если вы хотите создать своего собственного робота, поэтому мы надеемся, что это руководство содержит необходимые документы.Этот проект очень удобно делать специально после того, как мы получили заказную печатную плату, которую мы заказали у JLCPCB, чтобы улучшить внешний вид нашего электронного устройства, а также в этом руководстве достаточно документов и кодов, чтобы вы могли создать своего красивого робота. Мы сделали этот проект всего за 4 дня, всего за один день, чтобы получить все необходимые детали и закончить изготовление оборудования и сборку, затем один день, чтобы подготовить код, соответствующий нашему проекту, и два дня, чтобы создать приложение для Android, затем мы приступили к тестированию и настройке.
Что вы узнаете из этого руководства:- Правильный выбор оборудования для вашего проекта в зависимости от его функциональности.
- Разберитесь в механизме роботов.
- Подготовьте принципиальную схему для подключения всех выбранных компонентов.
- Припаяйте электронные части к печатной плате.
- Собрать все детали проекта (корпус робота).
- Запустите первый тест и подтвердите проект.
Как всегда, ребята, я стараюсь подобрать несколько простых проектов для аудитории, чтобы каждый мог их попробовать, и сегодняшний проект также прост, основан на 3D-печатных частях робота SMARS, который представляет собой небольшое транспортное средство с двумя микромоторами, и там есть множество дизайнов, которым вы можете следовать, чтобы создать своего собственного робота, а также об аксессуарах, которые вы можете добавить к своему роботу, их много, но для нашего проекта мы начнем с базового дизайна, поэтому в нем не будет много аксессуаров, но мы будем опубликуйте в следующих видеороликах, как добавить дополнительные функции к нашему маленькому роботу.
Переходя к части управления , как показано на схеме выше, мы будем использовать ATmega328 MCU , который вы можете получить от платы Arduino UNO, этот MCU управляет двумя микромоторами через драйвер H-моста L293. и, как вы можете видеть, я добавил два драйвера двигателя, чтобы вы могли использовать эту принципиальную схему в случае, если ваш робот представляет собой робот с четырьмя двигателями, а также у нас есть выход зуммера, управление выходом серводвигателя, контакты подключения Bluetooth и вход ультразвукового датчика, все это особенности, с которыми вы можете поиграть, когда создадите ту же принципиальную схему.
И последний компонент — это регулятор напряжения 5 В, который здесь требуется, поскольку мы используем батарею 9 В для питания робота, и нам нужно снизить напряжение до 5 В для питания микроконтроллера и двигателей.
Шаг 2: Изготовление печатной платы О JLCPCBJLCPCB (Shenzhen JIALICHUANG Electronic Technology Development Co., Ltd.) — крупнейшее предприятие по разработке прототипов печатных плат в Китае и высокотехнологичный производитель, специализирующийся на быстром производстве прототипов печатных плат и мелкосерийном производстве печатных плат.Обладая более чем 10-летним опытом в производстве печатных плат, JLCPCB имеет более 200 000 клиентов в стране и за рубежом, с более чем 8 000 онлайн-заказов на изготовление прототипов печатных плат и производство небольших партий печатных плат в день. Годовая производственная мощность составляет 200 000 кв.м. для различных 1-слойных, 2-слойных или многослойных печатных плат. JLC — профессиональный производитель печатных плат, отличающийся крупномасштабным, скважинным оборудованием, строгим управлением и превосходным качеством.
Говорящая электроникаПосле подготовки схемы я преобразовал ее в индивидуальный дизайн печатной платы, и теперь самая простая задача — разместить заказ на печатные платы, поэтому мне нужно перейти к JLCPCB, лучшему поставщику печатных плат, чтобы получить лучшую печатную плату. услуги производства, как всегда, просто несколько простых щелчков мыши — это все, что вам нужно, чтобы загрузить файлы GERBER схемы проектирования, затем я перешел, чтобы установить некоторые параметры, и на этот раз мы будем использовать синий цвет для этой печатной платы, всего через четыре дня после размещения заказа и мои печатные платы находятся на моем рабочем столе.
Упаковка, отгрузка и все этапы производства выполнены очень хорошо для производства этих красивых печатных плат.
Файлы для скачиванияКак вы можете видеть на фотографиях выше, печатная плата изготовлена очень хорошо, и у меня такая же Дизайн печатной платы, который мы сделали для нашей основной платы, и все этикетки и логотипы должны направлять меня на этапах пайки. Вы также можете скачать Gerberfile для этой схемы.
Шаг 3: ИнгредиентыПеред тем, как приступить к пайке электронных частей, давайте рассмотрим список электронных компонентов для нашего проекта, поэтому нам потребуются:
И нам понадобятся детали, напечатанные на 3D-принтере для робота
Шаг 4: Сборка оборудованияТеперь все готово, так что давайте приступим к пайке наших электронных компонентов на печатной плате. Для этого нам понадобятся паяльник, проволочный сердечник для пайки и паяльная станция SMD для SMD-компонентов.
Безопасность прежде всегоПаяльник Никогда не прикасайтесь к элементу паяльника …. 400 ° C! Удерживайте нагреваемые провода пинцетом или зажимами. Когда паяльник не используется, всегда возвращайте его на подставку. Никогда не кладите его на верстак. Выключайте прибор и отключайте его от сети, когда он не используется. Как вы можете видеть, использовать эту печатную плату так просто из-за ее очень высокого качества изготовления и не забывая метки, которые будут направлять вас, ребята, при пайке каждого компонента, потому что вы найдете на верхнем слое шелка этикетку каждого компонента, указывающую его размещение на плату и таким образом вы будете на 100% уверены, что не допустите ошибок при пайке.Я припаял каждый компонент к месту, и вы можете использовать обе стороны печатной платы для пайки электронных компонентов.
Шаг 5: Сборка корпуса роботаМы продолжаем сборку деталей нашего робота, и мы начнем с цепи колеса, нам нужны эти 32 части цепи, 16 частей для каждой стороны, и мы использовали эту пластиковую нить, которую мы разрезали на 30 частей, каждая часть имеет 15 миллиметров длины. длины, и мы скрепляем части цепи вместе, вы можете использовать немного клея, чтобы убедиться, что цепь остается прикрепленной, теперь мы берем шасси робота и эти два свободных колеса и собираем их вместе, после этого мы вставляем аккумулятор 9 В и микромоторы к ним размещения, и мы собираем активные колеса с двигателями, и наконец, что не менее важно, мы кладем цепь, чтобы соединить колеса друг с другом, последний шаг — прикручивание проводов колес и батареи 9 В, затем мы вставляем печатную плату в ее гнездо и наш робот готов к работе.
Шаг 6: Программная часть и тестированиепришло время перейти к программной части, которую я сделал этот код Arduino, который вы можете получить по ссылке для скачивания ниже, это настолько базовый код, просто некоторые инструкции, которые нужно получить из приложения Android для управления движениями робота, Теперь все, что нам нужно, это разместить MCU на плате Arduino UNO, и мы загружаем код в микроконтроллер, а затем возвращаем его в гнездо на нашей печатной плате.