16.6. Тиристорное управление электроприводом
О сновными
факторами, обусловившими быстрое
развитие тиристорного электропривода,
являются следующие: высокий КПД
тиристорного преобразователя (0,95—0,97),
относительно малые габариты, масса и
инерционность тиристоров, незначительная
мощность устройств управления.
сновными
факторами, обусловившими быстрое
развитие тиристорного электропривода,
являются следующие: высокий КПД
тиристорного преобразователя (0,95—0,97),
относительно малые габариты, масса и
инерционность тиристоров, незначительная
мощность устройств управления.
Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока.
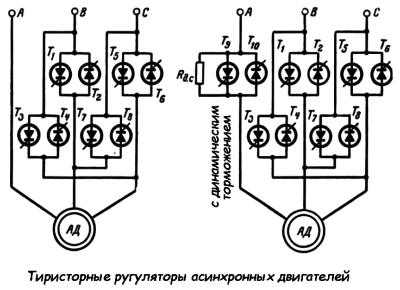
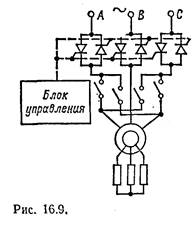
Тиристорный электропривод переменного тока. Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае с их помощью можно регулировать амплитуду (фазное регулирование) или частоту (частотное регулирование) синусоидального напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя (14.35). Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (рис. 14.25) регулировать его частоту вращения. На рис. 16.9 приведена схема
И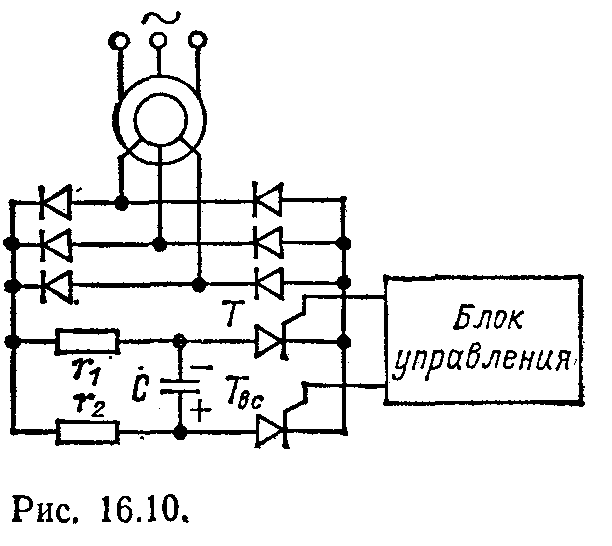 скусственной
коммутациейназывается
выключение тиристора посредством
подключения к его выводам какого-либо
источника энергии, создающего в нем ток
обратного направления. Примером может
служить тиристорное
управление в цепи ротора асинхронного
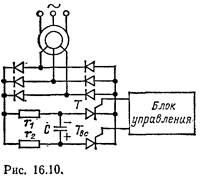
двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий
цепь выпрямленного тока через резистор r1 имеет
узел искусственной коммутации. Узел
искусственной коммутации содержит
вспомогательный тиристор Tвс,
резистор г2
скусственной
коммутациейназывается
выключение тиристора посредством
подключения к его выводам какого-либо
источника энергии, создающего в нем ток
обратного направления. Примером может
служить тиристорное
управление в цепи ротора асинхронного
двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий
цепь выпрямленного тока через резистор r1 имеет
узел искусственной коммутации. Узел
искусственной коммутации содержит
вспомогательный тиристор Tвс,
резистор г2
Пусть
первоначально рабочий тиристор Т открыт,
а вспомогательный Твс закрыт.
В это время конденсатор С заряжается
через резистор г2 так, как показано на рис. 16.10. Подадим
теперь на управляющий электрод
вспомогательного тиристора Твс отпирающий
сигнал из устройства управления.
Вспомогательный тиристор включится, и
конденсатор начнет разряжаться через
него и рабочий тиристор. Так как при
этом разрядный ток конденсатора направлен
навстречу прямому току рабочего
тиристора, то последний выключается.
После этого конденсатор перезаряжается
через резистор r
Чтобы вновь включить рабочий тиристор, на его управляющий электрод надо подать сигнал из устройства управления. При этом конденсатор своим разрядным током выключает вспомогательный тиристор, а сам конденсатор перезаряжается, возвращаясь к состоянию, показанному на рисунке.
Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора.
Э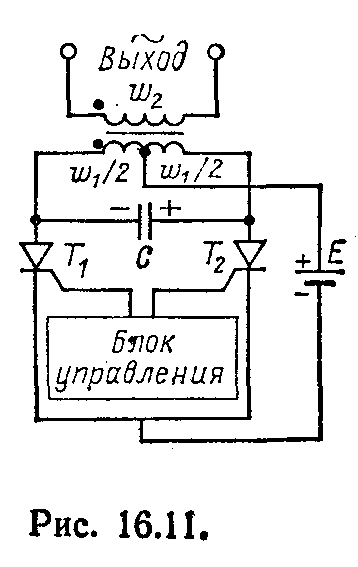
Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора. Для этой цели широко используются тиристорные автономные инверторы, т. е. устройства преобразования постоянного напряжения в переменное с любым числом фаз.
Рассмотрим простейшую схему однофазного автономного инвертора (рис. 16.11), в которой источник постоянного напряжения
Если управляющий сигнал включает тиристор Т2, то перезарядка конденсатора С закрывает тиристор T1 аналогично рис. 16.10, а источник постоянного напряжения
Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18).
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения
Устройства, сочетающие в себе тиристорные выпрямители и тиристорные инверторы, принято называть шириапорными преобразователями. В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель.
Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше.
Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока.
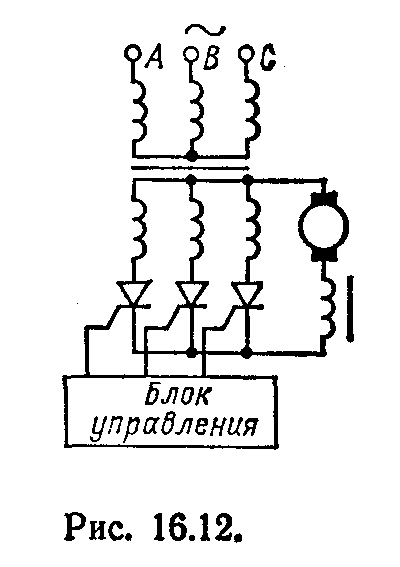
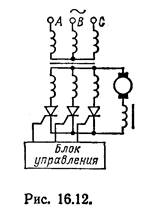
Одна из простейших схем включения двигателя постоянного тока в трехфазную цепь переменного тока приведена на рис. 16.12. Управляющее устройство синхронно включает тиристоры в порядке чередования фаз в положительные полупериоды фазных напряжений (рис. 10.17). В отрицательные полупериоды фазных напряжений происходит естественная коммутация, и тиристоры соответствующих фаз закрываются.
Среднее значение выпрямленного напряжения трех фаз равно напряжению на якоре двигателя постоянного тока (10.10):

где α — угол запаздывания включения тиристоров.
Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2).
Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока.
studfile.net
Тиристорный регулятор: схемы, управление, быстродействие
Тиристорный регулятор – устройство для подстройки мощности передаваемой электрической энергии, использующее в конструкции тиристорный силовой ключ. Применяется для изменения скорости вращения двигателей, силы светимости приборов иллюминации и прочих целей.
Общие сведения
Все современные технические решения образованы в начале второй половины XX века. Глупо считать учебники того времени устаревшими. Нельзя обойти благодарностью Шубенко В.А., Браславского И.Я. и остальной коллектив авторов, приготовивших для читателей столь замечательный материал.
Тиристоры так часто используются в регуляторах, что давно уже вытеснили транзисторы. Это объясняется высокими эксплуатационными и энергетическими характеристиками в роли управляемых вентилей. Основным преимуществом считается плавность настройки параметров. Хотя в ранних моделях и современных это реализуется принципиально иными путями. В результате привод характеризуется рядом положительных качеств:
- Повышенный КПД;
- Быстродействие;
- Резко очерченная форма управляющего сигнала;
- Дешевизна;
- Простота;
- Небольшие размеры.
Тиристорные регуляторы сегодня найдутся везде. В стиральных машинах изменяют плавно скорость вращения вала путём отсечки тока, в кухонных комбайнах по величине искрения подстраивают потребляемую мощность для стабилизации оборотов. Ранее тиристорные регуляторы применялись исключительно для асинхронных двигателей, преимущественно в паре с короткозамкнутым ротором. Сегодня принципиально новые технические решения намного раздвинули границы указанной отрасли. Уже в 60-е годы схемы применялись по двум направлениям:
- Настройка амплитуды питающего напряжения.
- Преобразование частоты питающего напряжения.
Первая методика считается универсальной и годится для абсолютного большинства двигателей. Вторая демонстрирует ограничения, на современном этапе в бытовых приборах встречается крайне редко, отвоевав сегмент среди промышленных применений. В домашнем оборудовании нынче применяется иная методика – отсечка тока (фазовый метод). Часть периода ключ пропускает переменное напряжение, в остальное время закрывается. Такой режим характеризуется минимальными затратами энергии при приемлемых характеристиках.
Типичная схема использования
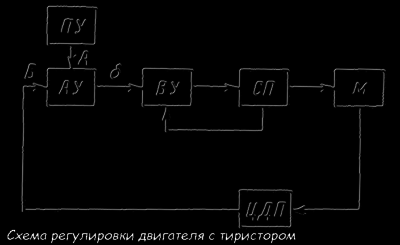
В большинстве случаев схема применения тиристорного регулятора остаётся прежней, мало меняющейся с годами:
- Программные установки (ПУ) в виде кода закладываются в память арифметического устройства (АУ) электронного блока. В стиральной машине это самая дорогая часть. Настолько, что замена часто нецелесообразна.
- Тиристорный регулятор служит вводным устройством (ВУ), куда поступает управляющий сигнал.
- Изменённое напряжение воздействует на сервисный привод (СП), обмотки двигателя, коллектор и пр. Линия обратной связи показывает, что малая нестабильность компенсируется непосредственно без участия центрального процессора. Выше уже говорилось про величину искрения.
- Механизм (М) отрабатывает команды. На валу стоит централизованный датчик положения (ЦДП), по которому процессор понимает, что происходит в результате подачи команд. При необходимости алгоритм корректируется.
До тиристорных регуляторов использовались генераторы с непосредственным управлением либо ртутные выпрямители, с легко изменяемыми характеристиками. Но указанные устройства работали лишь в паре с коллекторными двигателями. Следовательно, простота, дешевизна, неприхотливость асинхронных оказывались не востребованы до появления тиристорных регуляторов.
Схема фазного управления двигателем
На рисунке представлена простейшая тиристорная схема для управления движением вала. Через ветки проходят импульсы обеих полярностей. При необходимости тиристор возможно запереть. В зависимости от совокупности управляющих сигналов изменяется порядок чередования фаз, что обеспечивает возможность реверсирования вала. Первая схема решает указанную задачу, вторая одновременно задаёт угол отсечки.
Безусловным плюсом такого технического решения считается возможность безболезненного отключения двигателя от сети на период торможения. Этим блокируется возврат энергии в сеть. Становится возможным режим противовключения. При открытых тиристорах 1 и 7 на одну обмотку приложены все напряжения. Как результат, образуется ощутимая постоянная составляющая. Продуцируемое ею магнитное поле служит интенсивному динамическому торможению вала, обусловленному потокосцеплением. Эта схема по-другому называется в литературе двухпульсным питанием в сети с изолированной нейтралью.
Интенсивность тормозящего магнитного поля регулируется введением в фазу А дополнительного резистора, не участвующего в работе, но только в останове. Одновременно тиристоры 9 и 10 полностью закрыты, току не остаётся другого пути. Это нужно, чтобы избежать перегрева и отдачи большого пика реактивной мощности в цепь. Управляющие цепи для упрощения на рисунке не показаны.
Тиристоры характеризуются конечным временем переключения, остаётся возможность создания ситуации, когда один ключ ещё работает, а второй уже включился. Что приведёт немедленно к межфазному короткому замыканию. В результате оба тиристора выйдут из строя из-за перегрева, ведь полупроводниковый p-n-переход теряет свойства необратимо в последнем случае. Кремниевые приборы предпочтительнее, выдерживают нагрев почти до 150 градусов Цельсия. Разумеется, силовые ключи снабжаются мощными радиаторами.
В этом плане режим отсечки тока, применяемый в современных схемах, смотрится намного более привлекательным, значительную часть периода ключ отдыхает. Если брать в рассмотрение компьютерные импульсные блоки питания, охлаждением занимается небольшой вентилятор. Без него размеры радиатора тиристорного ключа пришлось бы увеличить. В современных схемах повсеместно применяется широтно-импульсная модуляция, одним из методов реализации становится отсечка тока.
Чтобы тиристоры не срабатывали одновременно, полагается управляющие сигналы подавать с задержкой. Корректировка скорости на представленной схеме выполняется чередованием режимов питания и динамического торможения. Для коллекторных двигателей это излишне. Гораздо эффективнее менять угол отсечки для корректировки подаваемой мощности. Это одновременно сберегает потребляемую энергию, увеличивая КПД установки.

Непрерывный режим питания двигателя обеспечивается выработкой управляющих импульсов согласованно с переходом напряжения через нуль. Одна из возможных схем реализации упомянутой концепции представлена на рисунке. Её вариант показан для управления встречно включёнными тиристорами, чтобы избежать одновременного открытия ключей.

Фазовое управление тиристорами
Регуляция скорости вращения при помощи тиристоров с внедрением цепи обратной связи обнаруживает ряд преимуществ. До введения подобных технических решений указанные задачи решали дроссели с работой в режиме насыщения, отличаясь рядом недостатков:
- Повышенный нижний порог срабатывания.
- Большие потери.
- Низкое быстродействие.
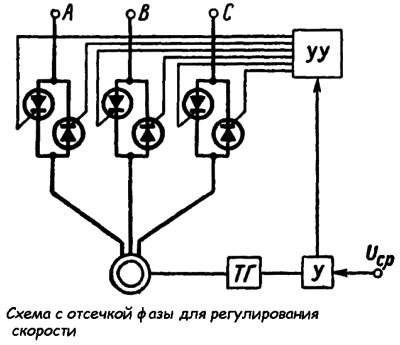
Схема управления напоминает показанную выше для обеспечения динамического торможения. Единственная разница в отсутствии резистора. Впрочем, выше уже делался намёк, что представленное техническое решение годится для создания нужных углов отсечки, что аналогично по смыслу. Исходя из опытных данных, определены требования к управляющим импульсам:
- Крутой фронт.
- Ширина не менее 60-ти градусов.
- Начальный момент включения в районе 20 градусов по фазе.

В схемах с глухозаземлённой нейтралью допустимо рассматривать каждую фазу по отдельности, словно работает обычный двигатель стиральной машины в сети 220 В. В цепях с изолированной нейтралью для правильной коммутации приходится учитывать фазовый угол каждой питающей линии и включать тиристоры попарно. С изменением задержки относительно времени прохождения напряжения через нуль варьируется передаваемая мощность. При угле сдвига фаз в 135 градусов вал переходит на минимальный режим, соответствующий холостому ходу (без нагрузки). Это верхний предел для систем фазной регулировки посредством тиристоров.
На схожем принципе действуют современные системы управления: пылесос, стиральная машина, кухонный комбайн и т.д. Минимальным углом отсечки для асинхронных двигателей считается 20 градусов. Согласно очевидным соображениям, сдвиг фаз схемы управления не должен зависеть от колебаний входного напряжения, реализуется за счёт вертикального принципа. Примеры конструкций на рисунке.

Конденсатор С1 служит для создания пилообразного напряжения. Начало импульсов синхронизировано с точкой перехода потенциала питания через нуль. Длина зуба достигает 160 градусов (почти половина периода), что и требуется, поскольку верхний порог регулирования составляет 135. Измерение текущего состояния системы производится по мостовой схеме. В нужный момент открывается ключ, формируя импульс, запускающий блокинг-генератор.
Трансформатор Тр1 питается от линии трёхфазной сети. Когда на обмотке минус, отпирается диод Д1, и питание идёт мимо конденсатора. Пилообразный импульс спадает. Заряд происходит при запертом диоде Д1. Момент открывания и, как следствие, форма зубца, регулируются подтягиванием напряжения Uy до нужного значения. Этим занимается схема управления, оценивающая одновременно скорость вращения вала. Блокинг-генератор формирует импульс заданной длины в требуемый момент времени, реализуя управление тиристорной схемой регулирования оборотов.
Оптимальное быстродействие
В системах регулирования скорости промышленного назначения не отмечается трудностей с разгоном, который легко реализуется при помощи системы реле и многоступенчатых реостатов. Когда начинается торможение, требуется вычислить момент начала подачи управляющих сигналов для снижения негативных эффектов.
Указанную задачу решает специальный блок, занимающийся оценкой текущего состояния системы. Опытным путём рассчитывается схема торможения, в управляющее устройство закладывается готовый алгоритм. При помощи датчиков определяется рассогласование между текущим состоянием и моментом начала торможения. Среди данных появляются величины – угловой путь вала до останова и прочие.
Обратная связь по скорости нелинейна и, как правило, не может быть рассчитана, данные об этой зависимости вводятся в память вычислителя. Как результат, согласно имеющейся нагрузке и динамическим показателям системы вырабатывается команда останова в нужный момент времени. Учитываются факторы:
- Отсутствие перегрева обмоток импульсом тока останова.
- Минимизация отдачи в сеть реактивной мощности.
- Продление срока эксплуатации установки.
- Отсутствие условий для создания аварий и механических перегрузок.

В ходе разработки системы управления тиристорным регулятором учитывается факт невосприимчивости асинхронного двигателя к воздействующим факторам на низких оборотах. В этом случае требуется минимальное рассогласование по скорости между полями ротора и статора, обеспечивающими возникновение токов Фуко и, как следствие, наличие потокосцепления. Это существенное ограничение асинхронных двигателей, из-за которого их применение в быту сводится к минимуму.
vashtehnik.ru
ТИРИСТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ — МегаЛекции
 Основными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления.
Основными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления.
Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока.
Тиристорный электропривод переменного тока.Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае с их помощью можно регулировать амплитуду (фазное регулирование) или частоту (частотное регулирование) синусоидального напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя (14.35). Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (рис. 14.25) регулировать его частоту вращения. На рис. 16.9 приведена схема преобразователя (регулятора) переменного напряжения
 Искусственной коммутацией называется выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить тиристорное управление в цепи ротора асинхронного двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий цепь выпрямленного тока через резистор r1имеет узел искусственной коммутации. Узел искусственной коммутации содержит вспомогательный тиристор Tвс, резистор г2и конденсатор С.
Искусственной коммутацией называется выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить тиристорное управление в цепи ротора асинхронного двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий цепь выпрямленного тока через резистор r1имеет узел искусственной коммутации. Узел искусственной коммутации содержит вспомогательный тиристор Tвс, резистор г2и конденсатор С.
Пусть первоначально рабочий тиристор Т открыт, а вспомогательный Твсзакрыт. В это время конденсатор С заряжается через резистор г2 так, как показано на рис. 16.10. Подадим теперь на управляющий электрод вспомогательного тиристора Твсотпирающий сигнал из устройства управления. Вспомогательный тиристор включится, и конденсатор начнет разряжаться через него и рабочий тиристор. Так как при этом разрядный ток конденсатора направлен навстречу прямому току рабочего тиристора, то последний выключается. После этого конденсатор перезаряжается через резистор r1и открытый вспомогательный тиристор.
Чтобы вновь включить рабочий тиристор, на его управляющий электрод надо подать сигнал из устройства управления. При этом конденсатор своим разрядным током выключает вспомогательный тиристор, а сам конденсатор перезаряжается, возвращаясь к состоянию, показанному на рисунке.
Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора.
 Эквивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.
Эквивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.
Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора. Для этой цели широко используются тиристорные автономные инверторы, т. е. устройства преобразования постоянного напряжения в переменное с любым числом фаз.
Рассмотрим простейшую схему однофазного автономного инвертора (рис. 16.11), в которой источник постоянного напряжения Е соединен со средней точкой первичной обмотки трансформатора. Когда тиристор T1 включается сигналом блока управления, а тиристор Т2закрыт, то источник постоянного напряжения Е подключается к левой половине первичной обмотки трансформатора. Ток этой части •первичной обмотки возбуждает магнитный поток в магнитопроводе трансформатора. При этом во вторичной обмотке трансформатора индуктируется ЭДС, а конденсатор С заряжается, как показано на рисунке.
Если управляющий сигнал включает тиристор Т2, то перезарядка конденсатора С закрывает тиристор T1 аналогично рис. 16.10, а источник постоянного напряжения Е подключается к правой половине первичной обмотки. В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке ω2. Частота переменного напряжения, получаемого от инвертора, определяется частотой генератора управляющих сигналов, включающих поочередно тиристоры.
Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18).
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения Е используется выпрямленное напряжение сети переменного тока. Если для этой цели, так же как и для инвертирования, использовать тиристоры, то выпрямленное напряжение можно регулировать в широких пределах (см. рис. 10.17). Это дает дополнительные возможности для управления асинхронным двигателем.
Устройства, сочетающие в себе тиристорные выпрямители и тиристорные инверторы, принято называть шириапорными преобразователями. В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель.
Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше.
Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока.
Одна из простейших схем включения двигателя постоянного тока в трехфазную цепь переменного тока приведена на рис. 16.12. Управляющее устройство синхронно включает тиристоры в порядке чередования фаз в положительные полупериоды фазных напряжений (рис. 10.17). В отрицательные полупериоды фазных напряжений происходит естественная коммутация, и тиристоры соответствующих фаз закрываются.
Среднее значение выпрямленного напряжения трех фаз равно напряжению на якоре двигателя постоянного тока (10.10):

где α — угол запаздывания включения тиристоров.
Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2).
Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока.
Рекомендуемые страницы:
Воспользуйтесь поиском по сайту:
megalektsii.ru
Частотник для однофазного электродвигателя, принцип действия
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Watch this video on YouTube
chistotnik.ru
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.

На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением


Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.

Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).

Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.

Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
masterxoloda.ru
Асинхронные двигатели с фазным ротором и схемы управления
резисторы. Рис. 6.14.
Рис. 6.14.
Схема управления пуском и динамическим торможением асинхронного двигателя
Постоянный ток протекает по всем обмоткам статора или по части их, создает постоянное во времени магнитное поле. В обмотках вращающегося по инерции ротора будет наводиться ЭДС и потечет ток, который создаст свое неподвижное в пространстве магнитное поле. Взаимодействие тока ротора с результирующим магнитным полем АД приведет к появлению тормозного момента и остановке ротора.
Преобразуемая при этом механическая энергия движущихся частей в электрическую рассеивается в виде тепла.
Пуск двигателя осуществляется нажатием кнопки SB1 (см. рис. 6.14).
После чего срабатывает линейный контактор КМ, подключающий обмотки статора к трехфазному источнику питания. Замыкающий блок-контакт КМ в цепи реле времени КТ вызовет его срабатывание. В результате чего контакты этого реле замкнутся в цепи контактора торможения КМ1, но этот контактор не сработает, так как перед этим произойдет размыкание блок-контакта КМ.
Нажатием кнопки SB3 производится остановка АД. Катушка линейного контактора теряет питание и контакты КМ в цепи обмоток статора размыкаются, отключая двигатель от сети переменного тока.
Одновременно с этим замыкается размыкающий блок-контакт КМ в цепи катушки контактора торможения КМ1; последний включается и подает в обмотки статора постоянный ток от выпрямителя V через резистор RT и замыкающий блок контакт КМ1. АД переходит в режим динамического торможения.
С потерей питания катушки КМ, также размыкается замыкающий блок-контакт КМ в цепи реле времени КТ. Это реле, потеряв питание, начинает отсчет выдержки времени. Через промежуток времени, соответствующий останову двигателя, реле КТ размыкает свои контакты в цепи катушки контактора КМ1.

уст.I
Обмотка статора отключается от источника постоянного тока и схема переходит в свое первоначальное состояние.
Задержкой срабатывания реле КТ и величиной регулируемого резистора Rт устанавливают время динамического торможения.
Схема управления реверсивным асинхронным двигателем с фазным ротором. Частоту вращения ротора асинхронного электродвигателя с фазным ротором можно регулировать, изменяя величину сопротивления в роторной цепи (см. подразд. 5.2).
Управлять такими электродвигателями возможно с помощью силовых и магнитных контроллеров (рис. 6.15). В настоящее время в подъемнотранспортных механизмах используются магнитные контроллеры, относящиеся к аппаратам дистанционного управления.
Рис. 6. 15. Схема управления трехфазным асинхронным двигателем с фазным
ротором: а) силовая схема; б) схема управления
В первом положении командоконтроллера “Вперед” замыкается контакт S1.1, подавая питание на катушку. Контактор КМ1 подключает обмотки статора двигателя и тормозной электромагнит YB1 к сети. В цепь ротора электродвигателя при этом включено полное сопротивление пускорегулирующего реостата, и двигатель разгоняется по характеристике I (см. рис. 5.4) до установившейся частоты вращения n при заданном моменте сопротивления Мс.
Во втором положении замыкается контакт S1.3 командоконтроллера и включается контактор КМ3, который закорачивает часть сопротивлений
реостата. Двигатель переходит на работу по характеристике II, разгоняется до частоты вращения nуст.II.
В третьем положении контроллера включается контактор КМ4, который закорачивает выводы обмотки ротора, и двигатель работает на естественной характеристике III с частотой вращения nуст.III.
Для выключения двигателя необходимо контроллер перевести в нулевое положение. Вращение “Назад” осуществляется постановкой рукоятки магнитного контроллера на позицию 1 “Назад”, при этом включается контактор КМ2. Происходит смена чередования фаз в обмотках статора и начинается обратное вращение ротора при полном включенном пускорегулирующем резисторе роторной цепи. Дальнейший процесс управления аналогичен описанному выше.
Особенностью работы двигателей подъемно-грузовых лебедок является спуск груза. В этом случае груз не только преодолевает силы трения, но и стремится ускорить вращение двигателя в направлении спуска. Скорость двигателя очень быстро достигает синхронной, после чего двигатель начинает работать как генератор под действием силы тяжести груза, т.е., тормозя механизм. Если сопротивление в цепи ротора двигателя полностью закороченно, то скорость опускания груза на 5–10 % больше синхронной частоты вращения. Увеличение роторного сопротивления приводит к увеличению скорости спуска (а не к уменьшению, как это бывает при подъеме).
Схема автоматического пуска и торможения противовключением асинхронного двигателя с фазным ротором. Пуск двигателя совершается нажатием кнопки SB1 (вперед) или SB2 (назад), тем самым подается питание на катушку контактора КМ1 (или КМ2). Рассмотрим работу схемы при срабатывании контактора КМ1 (рис. 6.16).
Обмотки статора подключаются к сети, включается блокировочное реле РБ. Катушка РП не притягивает свой якорь из-за малой ЭДС ротора и размыкающий контакт РП замкнут. Затем замыкающим контактом РБ собирается цепь катушки контактора КП, шунтирующего своими контактами ступень сопротивлений Rn в цепи ротора.
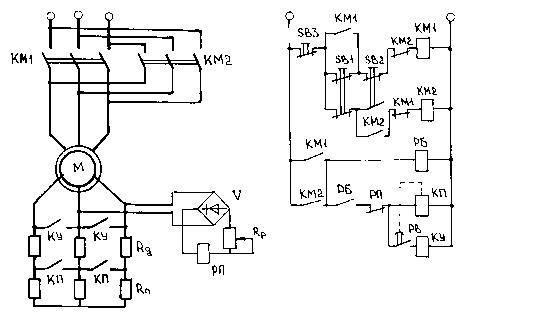 Рис. 6.16.
Рис. 6.16.
Схема торможения противовключением асинхронного двигателя с фазным ротором: а) силовая схема; б) схема управления
С помощью механического маятникового реле времени РВ, пристраиваемого к контактору КП, осуществляется выдержка времени, необходимая для некоторого разгона двигателя, после чего включается контактор КУ, шунтирующий сопротивления Rg в цепи ротора, и двигатель выводится на естественную характеристику.
Таким образом, пуск двигателя совершается в одну ступень с резистором в роторе Rg. Ступень резистора Rn служит для ограничения тока при торможении.
Если требуется реверсирование двигателя, то необходимо нажать на кнопку противоположного направления вращения (в нашем примере на кнопку SB2), не воздействуя на кнопку SB3 (стоп). При этом отключаются контакторы КМ1 и КП. Последний – из-за размыкания контакторов КМ1 и РБ. Как только замкнется размыкающий контакт КМ1 в цепи катушки контактора КМ2, он включится, и двигатель переведется в режим торможения противовключением.
В приведенной на рис. 6.16 схеме реализуется управление торможением в функции угловой скорости (по величине ЭДС ротора, которая пропорциональна скольжению). Реле напряжения РП через выпрямитель V подключается к выводам обмотки ротора. Реле настраивается с помощью резистора Rр так, что при начале торможения, когда направления вращений магнитного поля статора и ротора противоположны (S=2), оно срабатывает, а при угловой скорости, близкой к нулю (S=1), когда напряжение на его катушке снижается почти вдвое, реле отпускает свой якорь. При пуске в обратную сторону реле РП не срабатывает, так как ЭДС ротора становится еще меньше, достигая нулевого значения при S=0.
После включения контактора КМ2, когда произойдет реверсирование магнитного поля статора, срабатывает реле РП и своим размыкающим
контактором разорвет цепь катушки контактора КП, что обеспечит на период торможения введение всех резисторов в цепь ротора (Rg и Rn). Блокировочное реле РБ служит для создания временного разрыва в цепи катушки контактора КП, оно отключается одновременно с контактором КМ1, а включается только после замыкания контактов контактора КМ2. Когда контакты РБ сомкнутся, уже успеет сработать реле РП.
По окончании процесса торможения контакт РП закроется и контактор КП зашунтирует ступень сопротивления Rn. Затем произойдёт изменение направления вращения ротора, то есть пуск в противоположном направлении (назад).
Если остановку двигателя производить кнопкой SB3, то обмотки статора отключатся от сети, но электрического торможения не произойдет, двигатель остановится под действием статического момента сопротивления на валу.
Схема пуска асинхронного двигателя с фазным ротором в функции времени. Упрощенная принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени [8] представлена на рис. 6.17. Пуск двигателя по этой схеме осуществляется в две пусковые ступени, при этом для большей надежности цепи управления подключены к сети постоянного тока.
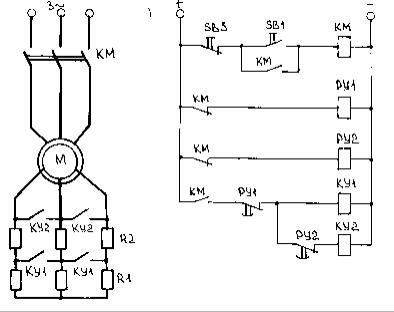 Рис. 6.17. Упрощенная
Рис. 6.17. Упрощенная
принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени: а) силовая схема; б) схема управления
При подключении цепей управления к источнику напряжения сразу включаются реле РУ1 и РУ2 через размыкающие блок-контакты КМ и КУ1. Реле без выдержки времени отключают катушки контакторов КУ1 и КУ2 от источника питания. Затем после нажатия кнопки SB1 и включения контактора КМ статор двигателя подключается к сети, а роторная цепь его замкнута на полностью включенные резисторы R1 и R2, так как силовые контакты контакторов КУ1 и КУ2 разомкнуты; начинается пуск АД.
Размыкающий контакт КМ в цепи катушки реле времени РУ размыкается, оно обесточивается, начинает отсчитывать выдержку времени при пуске на первой пусковой ступени. После выдержки времени реле РУ1 своим контактом замыкает цепь питания катушки контактора КУ1. Этот контактор зашунтирует пусковой резистор R1 своими силовыми контактами и снимает питание с реле времени РУ2 вспомогательным контактом КУ1. Реле РУ2 начинает отсчитывать выдержку времени, по окончании которой размыкающий контакт РУ2 замыкается, подключая к источнику питания катушку КУ2, в результате чего зашунтируется вторая ступень пускового сопротивления R2 и АД будет выведен на естественную характеристику.
Схема пуска асинхронного двигателя с фазным ротором в функции тока. Схема, приведенная на рис. 6.18, обеспечивает пуск асинхронного двигателя с фазным ротором в одну ступень в функции тока и динамическое торможение в функции скорости и включает оборудование:
•электромагнитные контакторы КМ1, КМ2, КМ3;
•реле тока КА;
•реле контроля скорости SR;
•реле напряжения KV;
•понижающий трансформатор Т;
•выпрямитель VD;
•предохранители FA1, FA2;
•тепловые реле КК1, КК2.
Реле контроля скорости SR размыкает свои контакты в цепи катушки электромагнитного тормоза КМ3, когда частота вращения уменьшается до значения, близкого к нулю, а замыкает, когда начнется разгон АД.
После включения автоматического выключателя нажимается кнопка пуска SB1. По известной схеме включается контактор КМ1, через силовые контакты которого статор АД подключается к сети. Бросок тока в цепи ротора, когда еще не замкнуты контакты КМ2, вызовет включение реле тока КА, последнее разорвет свои контакты в цепи катушки КM2. Таким образом, разбег начинается с пусковым сопротивлением R2g в цепи ротора.
 Рис. 6.18. Схема пуска АД в
Рис. 6.18. Схема пуска АД в
одну ступень в функции тока и динамического торможения в функции скорости
Вспомогательные контакты КМ1 замыкают цепь катушки промежуточного реле напряжения KV, шунтируют кнопку SB1, размыкают цепь контактора торможения КМ3. Несмотря на то, что реле KV включается, это не приводит к включению контактора КМ2, так как до этого в цепи разомкнулся контакт реле КА.
Трогание с места и вращение ротора вызывает замыкание контакта реле скорости SR в цепи тормозного контактора КМ3, но и этот контактор не сработает, так как до этого разомкнулся контакт КМ1. По мере разгона двигателя ток в цепи ротора уменьшается, и реле тока КА выключается, замыкая цепь контактора КМ2. Этот контактор зашунтирует резисторы R2g в цепи ротора, АД выйдет на естественную характеристику.
Для перевода в тормозной режим нажимается кнопка SB3. Контактор КМ1 теряет питание и отключается статор АД от сети, но включается тормозной контактор КМ3. Контактор КМ3 замыкает цепь питания катушек обмотки статора постоянным током от выпрямителя VD, подключенного к трансформатору Т. Тем самым осуществляется перевод АД в режим динамического торможения.
Одновременно с этим потеряет питание аппарат KV, а следовательно и КМ2, что приведет к вводу в цепь ротора резистора R2g. Двигатель начинает тормозить.
При скорости двигателя, близкой к нулю, реле контроля скорости SR размыкает свой контакт в цепи катушки контактора КМ3. Он отключается и прекращает торможение АД. Схема приходит в исходное положение и готова к последующей работе.
Принцип действия схемы не изменяется, если катушка реле тока включается в фазу статора, а не ротора при одноступенчатом разгоне двигателя.
Схема панели управления асинхронным двигателем типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления АД с фазным и короткозамкнутым роторами и обеспечивает пуск в две ступени и динамическое торможение в функции времени (рис. 6.19).
 Рис. 6.19. Схема панели
Рис. 6.19. Схема панели
управления асинхронного двигателя типа ПДУ 6220
При подаче на схему напряжений постоянного тока 220 В и переменного 380 В тока (замыкание рубильников Q1, Q2 и автомата QF) происходит включение реле времени КТ1, чем двигатель подготавливается к пуску с полным пусковым резистором в цепи ротора.
Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FA1–FA3 не включены, включается реле защиты KV от понижения питающего напряжения и готовит схему к работе замыканием своего блок-контактора KV.
Пуск двигателя осуществляется по любой из двух искусственных характеристик или по естественной характеристике, для чего рукоятка SA должна устанавливаться соответственно в положение 1,2 или 3. При переводе рукоятки в любое из указанных положений SA включается линейный контактор КМ2, подключающий АД к сети, контактор управления тормозом КМ5, подключающий к сети катушку YA электромагнитного тормоза,
который при этом растормаживает двигатель, и реле времени KT3, управляющее процессором динамического торможения.
Перевод контроллера SA в положение 2 или 3 позволяет включить контакторы ускорения КМ3 и КМ4, скорость двигателя увеличивается.
Торможение АД происходит за счет перевода рукоятки SA в нулевое положение. Тогда отключаются контакторы КМ2 и КМ5, а включается контактор динамического торможения КМ1, который подключает АД к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения АД, который закончится после отсчета реле своей выдержки времени, соответствующей времени торможения.
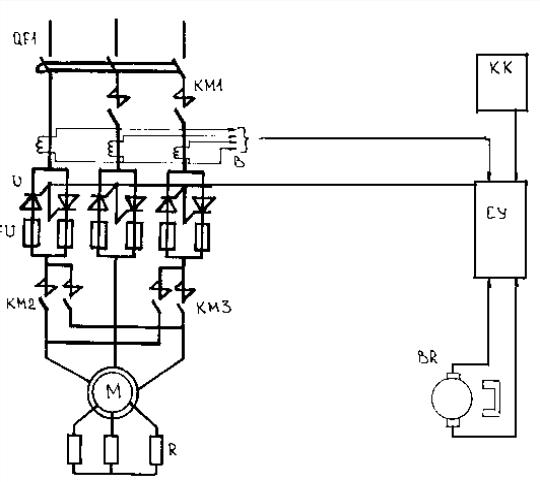
Схема управления тиристорным приводом переменного тока. Схема управления тиристорным приводом переменного трехфазного тока содержит тиристорный преобразователь, который включается в цепь статорных обмоток двигателя и осуществляет фазовое регулирование подводимого к двигателю напряжения (рис. 6.20).
Последовательно со статорными обмотками двигателя встречнопараллельно через быстродействующие предохранители FU включены три пары тиристоров преобразователя U. Регулированием угла открывания тиристоров с помощью системы управления СУ изменяется напряжение, подводимое к двигателю, а следовательно, и его момент.
Рис. 6.20. Схема управления асинхронного двигателя с тиристорным
преобразователем: QF – автоматический выключатель; В – датчик тока; U – тиристорный преобразователь; FU – предохранитель; KK – командоконтроллер; СУ-
система управления тиристорным преобразователем; BR – тахогенератор; КМ – электромагнитные контакторы
В результате получается ряд мягких механических характеристик, обеспечивающих плавный пуск и разгон механизма. При использовании обратной связи по частоте вращения, осуществляемой с помощью тахогенератора BR, жесткость механических характеристик увеличивается, что позволяет получить устойчивые промежуточные и низкую посадочную скорости.
Схемой предусмотрен контактный реверс двигателя контакторами КМ2 и КМ3. Переключение контакторов происходит при отсутствии тока в главной цепи под контролем датчика тока В. Бестоковая коммутация значительно повышает износостойкость аппаратуры.
С помощью тиристоров преобразователя может быть получено и регулируемое динамическое торможение, а также торможение противовключением. Управление углом открывания тиристоров может осуществляться ступенчато командоконтроллером КК, или плавно другим аппаратом, например, сельсином.
6.5. Крановые защитные панели
Крановые защитные панели применяют при контроллерном управлении двигателями крана. Конструкция защитной панели представляет собой металлический шкаф с установленной в нем аппаратурой. Шкаф закрыт дверью с замком. Второй замок заблокирован с главным рубильником, то есть дверь панели не откроется, пока не будет выключен рубильник, обесточивающий электрооборудование. Размещаются защитные панели обычно в кабине крана. На защитной панели установлена электроаппаратура, осуществляющая следующую защиту:
•максимальную от токов короткого замыкания и значительных (свыше 250 %) перегрузок крановых электродвигателей;
•нулевую, исключающую самозапуск двигателей после перерыва в электроснабжении;
•концевую, обеспечивающую автоматическое отключение электроприводов при переходе механизмами крана предельно допустимых положений.
Панели допускают подключение от трех до шести двигателей (рис. 6.21). В зависимости от числа защищаемых двигателей и соотношения их мощностей панели комплектуются соответствующим количеством блок-реле максимального тока, которые при срабатывании воздействуют на один, общий для группы из двух-четырех реле, контакт. Этим уменьшается число
studfile.net
Тиристорное управление электродвигателями
Категория:
Монтаж и эксплуатация лифтов
Публикация:
Тиристорное управление электродвигателями
Читать далее:
Тиристорное управление электродвигателями
В лифтах со скоростью кабины 1,6 м/с и более применяют тиристорный электропривод, в котором управление электродвигателями, т. е. их включение в сеть, реверсирование и, самое главное, регулирование частоты вращения, производятся с помощью управляемых тиристоров. Тиристорный электропривод получил распространение благодаря высокому КПД тиристорного преобразователя (до 0,95…0,97), малым габаритным размерам, отсутствию дополнительных электрических машин (как в приводе по системе Г—Д), возможностью получать регулировочные характеристики необходимого качества.
Рис. 61. Управляемый тиристор:
а — схема включения, б—вольт-амперная характеристика
Рекламные предложения на основе ваших интересов:
Из открытого состояния в закрытое тиристор переключают путем снижения анодного напряжения до значений, соответствующих только нижнему участку характеристики, т. е. практически путем снятия напряжения U.
Рис. 62. Кривые изменения напряжения тиристора в режиме управляемого вентиля: а—методом медленного изменения Uy, б— методом кратковременной подачи импульса У,
Введем теперь систему управляемых тиристоров в статорную цепь асинхронного короткозамкнутого двигателя (рис. 63). В каждую фазу статора включены два встречно-параллельных тиристора так, что к двигателю М подводится переменное напряжение с частично срезанной синусоидой (рис. 64). Устройство управления открывает тиристоры в порядке следования фаз. Изменяя момент времени включения тиристоров (/1—для верхней полуволны; t\ — для нижней полуволны синусоиды), можно регулировать эффективное переменное напряжение, питающее двигатель, и, следовательно, движущий момент двигателя. Используя тиристорный электропривод с асинхронным короткозамкнутым двигателем в схемах автоматического регулирования скорости, получают необходимую диаграмму скорости лифта, обеспечивающую плавное движение и остановку кабины на нужном этаже с заданной точностью.
Рекламные предложения:
Читать далее: Мощность электродвигателей лифтов
Категория: — Монтаж и эксплуатация лифтов
Главная → Справочник → Статьи → Форум
stroy-technics.ru