Урок 36 (дополнительный материал). Принцип действия электродвигателя. Электроизмерительные приборы
Принцип действия электродвигателя.
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Устройство и принцип работы простейшего электродвигателя.
В основе конструкции электрического двигателя лежит эффект, обнаруженный Майклом Фарадеем в 1821 году: что взаимодействие электрического тока и магнита может вызывать непрерывное вращение. Один из первых двигателей, нашедших практическое применение, был двигатель Бориса Семеновича Якоби (1801 –1874), приводивший в движение катер с 12 пассажирами на борту. Однако для широкого использования электродвигателя необходим был источник дешевой электроэнергии — электромагнитный генератор.
Принцип работы электродвигателя очень прост: вращение вызывается силами магнитного притяжения и отталкивания, действующими между полюсами подвижного электромагнита (ротора) и соответствующими полюсами внешнего магнитного поля, создаваемого неподвижным электромагнитом (или постоянным магнитом) — статором.
Вращающаяся часть электрической машины называется ротором (или якорем), а неподвижная — статором. В простом электродвигателе постоянного тока блок катушки служит ротором, а постоянный магнит — статором.
Сложность заключается в том, чтобы добиться непрерывного вращения двигателя. А для этого надо сделать так, чтобы полюс подвижного электромагнита, притянувшись к противоположному полюсу статора, автоматически менялся на противоположный — тогда ротор не замрет на месте, а повернется дальше — по инерции и под действием возникшего в этот момент отталкивания.
Для автоматического переключения полюсов ротора служит коллектор. Он представляет собой пару закрепленных на валу ротора пластин, к которым подключены обмотки ротора. Ток на эти пластины подается через токоснимающие контакты (щетки). При повороте ротора на 180° пластины меняются местами — это автоматически меняет направление тока и, следовательно, полюсы подвижного электромагнита. Так как одноименные полюсы взаимно отталкиваются, катушка продолжает вращаться, а ее полюсы притягиваются к соответствующим полюсам на другой стороне магнита.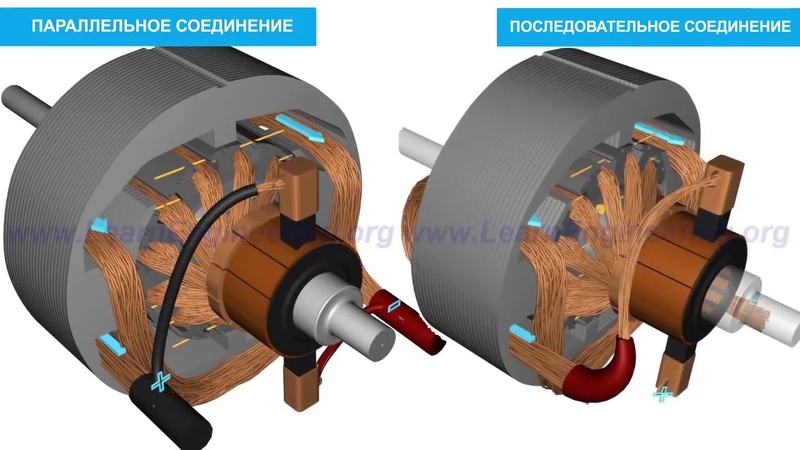
Простейший электродвигатель
Простейший электродвигатель работает только на постоянном токе (от батарейки). Ток проходит по рамке, расположенной между полюсами постоянного магнита. Взаимодействие магнитных полей рамки с током и магнита заставляет рамку поворачиваться. После каждого полуоборота коллектор переключает контакты рамки, подходящие к батарейке, и поэтому рамка вращается.
В некоторых двигателях для создания магнитного поля вместо постоянного магнита служит электромагнит. Витки проволоки такого электромагнита называются обмоткой возбуждения.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Промышленный электродвигатель
Электроизмерительные приборы.
Электроизмерительные приборы — класс устройств, применяемых для измерения различных электрических величин.
Группа электромагнитных приборов является наиболее распространенной. Принцип их действия, использованный впервые еще Ф. Кольраушем в 1884 году, основан на перемещении подвижной железной части под влиянием магнитного потока, создаваемого катушкой, по которой пропускается ток. Практическое осуществление этого принципа отличается разнообразием.
Ориентирующее действие магнитного поля на контур с током используют в электроизмерительных приборах магнитоэлектрической системы – амперметрах, вольтметрах и др.
Устройство прибора магнитоэлектрической системы
Измерительный прибор магнитоэлектрической системы устроен следующим образом.
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку из тонкого провода. Рамку крепят на двух полуосях О и О’, к которым прикреплена также стрелка прибора 4. Ось удерживается двумя тонкими спиральными пружинами 3. Силы упругости пружин, возвращающие рамку к положению равновесия в отсутствие тока, подобраны такими, чтобы были пропорциональными углу отклонения стрелки от положения равновесия. Катушку помещают между полюсами постоянного магнита М с наконечниками формы полого цилиндра. Внутри катушки располагают цилиндр 1 из мягкого железа. Такая конструкция обеспечивает радиальное направление линий магнитной индукции в области нахождения витков катушки (см рисунок).
В результате при любом положении катушки силы, действующие на нее со стороны магнитного поля, максимальны и при неизменной силе тока постоянны.
Силы, действующие на рамку с током прямо пропорциональны силе тока, то есть можно, проградуировав прибор, измерять силу тока в рамке.
Точно так же можно прибор настроить на измерение напряжения в цепи, если проградуировать шкалу в вольтах, причём сопротивление рамки с током должно быть выбрано очень большим по сравнению с сопротивлением участка цепи, на котором измеряем напряжение.
Дополнительные материалы.
1. Видео-ролик «Принцип работы электродвигателя»
2. Презентация «Электроизмерительные приборы» скачать с Яндекса
Медиа-материалы из Единой коллекции Цифровых Образовательных Ресурсов:
Рисунок «Вольтметр» 8_140
Рисунок-плакат «Электродвигатель» 8_224
Слайд-шоу «Работа электродвигателя» 8_225
Рисунок-плакат «Электроизмерительный прибор электродинамической системы» 8_227
Рисунок-плакат «Электроизмерительный прибор» 8_228
Слайд-шоу «Работа электроизмерительного прибора» 8_230
Принцип работы электродвигателя постоянного тока, устройство электромотора.
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Подробно о классификации и принципах работы электрических моторов, рекомендуем прочитать в нашей отдельной статье.
Содержание:
Электродвигатель постоянного и переменного тока
История изобретения
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле.
- После подачи питания вокруг якоря-ротора создавалось электромагнитное поле, чьи полюса располагались напротив друг друга по правилу буравчика и отклонялись от одноименных полюсов индуктора.
- Перед тем, как электромагнитное поле якоря устанавливалось на максимальном приближении к разноименным полюсам индуктора, специальный коммутатор отключал питание, и якорь продолжал вращаться по инерции.
- После того, как якорь выходил из-под полюсов индуктора, коммутатор включал питание с обратной полярностью и появившееся «перевернутое» электромагнитное поле отталкивалось от полюсов индуктора, делая полный оборот якоря.

1-4 — металлические кольца, 5 — скользящий контакт, 6 — батарея

Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.

Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.

Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.
 1).
1).Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.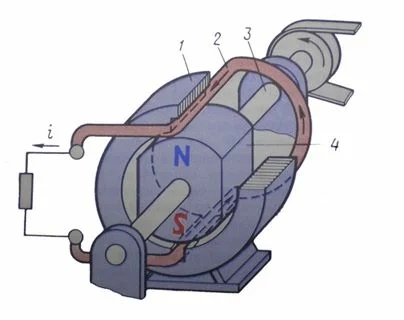
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т. п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
 п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.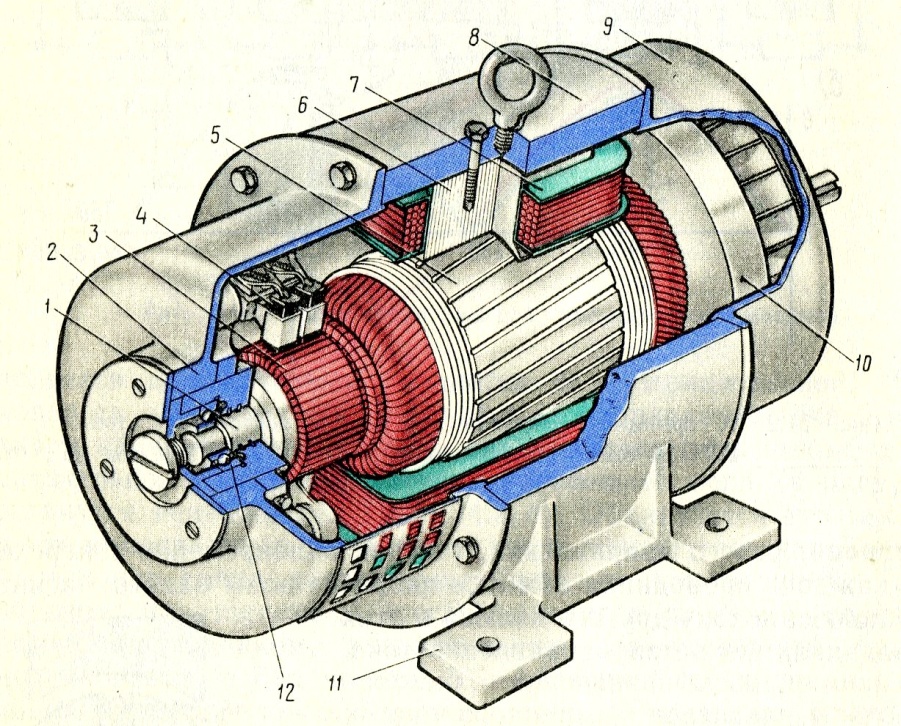
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.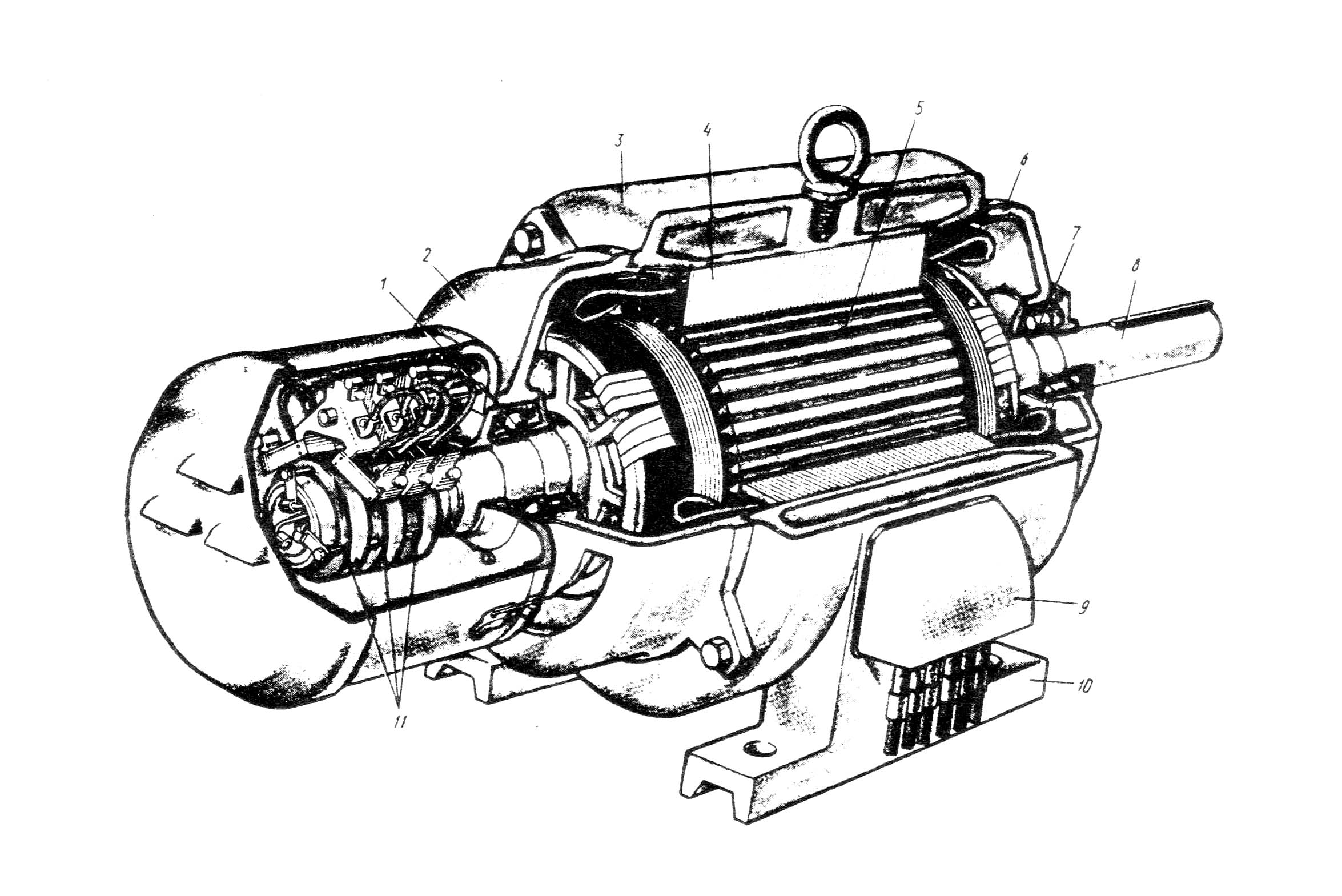
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Двигатели постоянного тока — Устройство, принцип действия электродвигателя
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
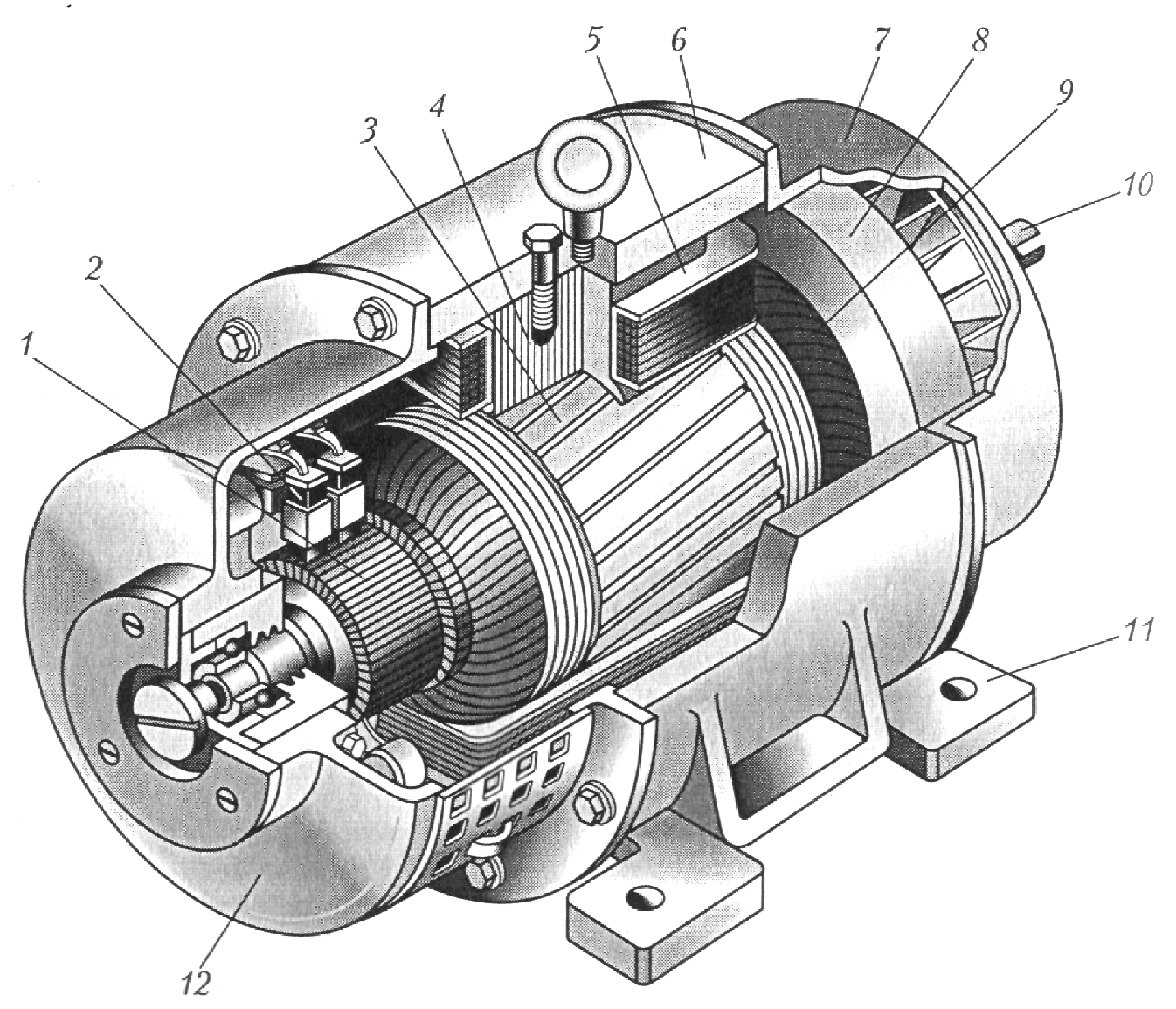
Рисунок 1 – Машина постоянного тока:
I — вал; 2 — передний подшипниковый щит; 3 — коллектор; 4 — щеткодержатель; 5 — сердечник якоря с обмоткой; б — сердечник главного полюса; 7 — полюсная катушка; 8 — станина; 9 — задний подшипниковый щит; 10 — вентилятор; 11 — лапы; 12 — подшипник
Рисунок 2 – Полюса машины постоянного тока:
а — главный полюс; б — дополнительный полюс; в — обмотка главного полюса; г — обмотка дополнительного полюса; 1 — полюсный наконечник; 2 — сердечник
В полюсах различают сердечник и наконечник (рисунок 2).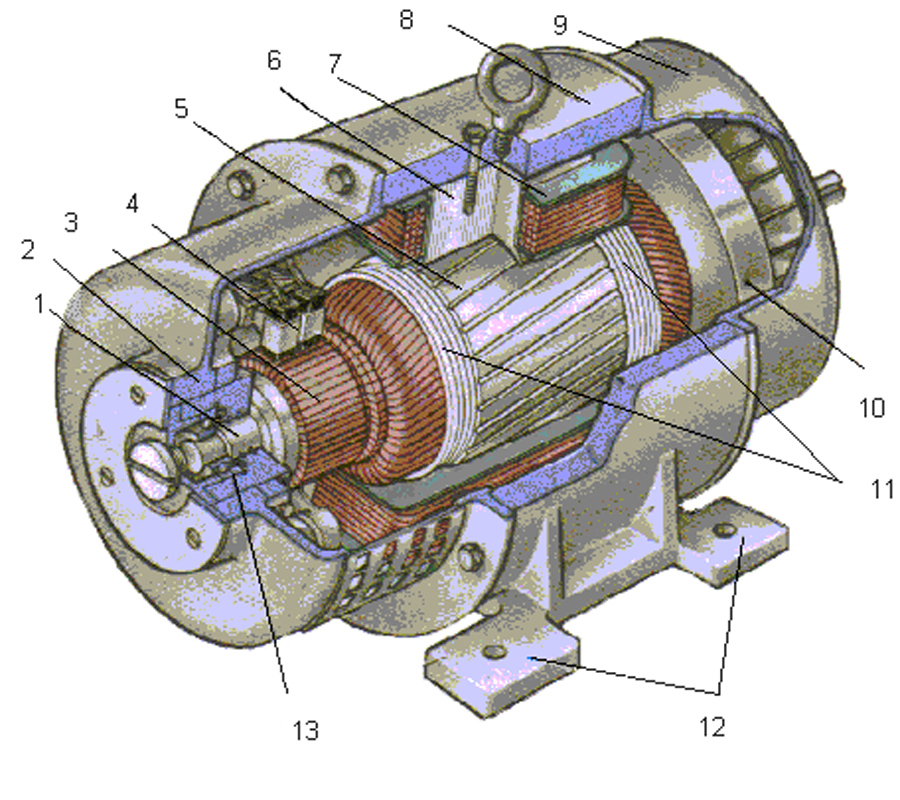 На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник якоря собирается из штампованных листов электротехнической стали толщиной 0,5 мм и спрессовывается с обеих сторон с помощью нажимных шайб. В машинах с радиальной системой вентиляции листы сердечника собираются в отдельные пакеты толщиной 6-8 см, между которыми делают вентиляционные каналы шириной 1 см. При осевой вентиляции в сердечнике выполняют отверстие для прохождения воздуха вдоль вала. На внешней поверхности якоря имеются пазы для обмотки.
На внешней поверхности якоря имеются пазы для обмотки.
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек — одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 — 1 мм. Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
Нижние (узкие) края пластин имеют вырезы в виде ‘ласточкина хвоста’, которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность ‘ласточкина хвоста’, при втором — на ‘ласточкин хвост’ и конец пластины.
Коллекторы с первым способом крепления называют арочными, со вторым — клиновыми. Наиболее распространены арочные коллекторы.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются ‘петушками’.
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеточный аппарат состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток. Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 — 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах.
Рисунок 4 – Щетки:
а — для машин малой и средней мощности; б — для машин большой мощности; 1 — щеточный канатик; 2 — наконечник
Различают обычные и фланцевые подшипниковые щиты.
Подшипниковые щиты изготовляют из стали (реже из чугуна или алюминиевых сплавов) методом литья, а также сварки или штамповки. В центре щита делается расточка под подшипник качения: шариковый или роликовый. В машинах большой мощности в ряде случаев используют подшипники скольжения.
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.
Электродвигатель постоянного тока. Принцип действия и устройство. – www.motors33.ru
На рис. 1-1 представлена простейший электродвигатель постоянного тока, а на рис. 1-2 дано его схематическое изображение в осевом направлении. Неподвижная часть двигателя, называемая индуктор, состоит из полюсов и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в электродвигателе основного магнитного потока. Индуктор изображенной на рис. 1-1 имеет два полюса 1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя состоит из укрепленных на валу цилиндрического якоря 2 и коллектора. 3. Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Обмотка якоря в показанном на рис. 1-1 и 1-2 простейшем электродвигателе имеет один виток. Концы витка соединены с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. На коллектор налегают две неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в нормальных электродвигателях постоянного тока создается обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током. Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу. Сердечники полюсов и ярмо также изготовляются из ферромагнитных материалов.
Рис. 1-1. Простейший электродвигатель постоянного тока
Рис. 1-2. Работа простейшего электродвигателя постоянного тока в режиме генератора (а) и двигателя (б).
Генератор постоянного тока.
Рассмотрим сначала работу электродвигателя в режиме генератора.
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется Э. Д. С., направление которой может быть определено по «правилу правой руки» и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта Э. Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
f = n,
а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью:
f = pn
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Двигатель постоянного тока.
Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы и возникнет электромагнитный момент. Величины силы и момента определяются как и для генератора. При достаточной величине Мэм якорь электродвигателя придет во вращение и будет развивать механическую мощность. Момент Мэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис. 1-2, а) и двигателя (рис. 1-2, б) были одинаковы, то направление действия а следовательно, и направление тока у двигателя должны быть обратными по сравнению с генератором (рис. 1-2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
Принцип обратимости. Из изложенного выше следует, что каждый электродвигателя постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью.
Для перехода машины постоянного тока из режима генератора в режим двигателя и обратно, при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в электродвигателях переменного тока.
Принцип работы электродвигателя — HiSoUR История культуры
Электродвигатель представляет собой электромеханический преобразователь (электрическая машина), который преобразует электрическую энергию в механическую. В обычных электродвигателях генерируются магнитные поля с токопроводящими проводниками, взаимные силы притяжения и отталкивания которых приводятся в движение. Таким образом, электродвигатель является аналогом очень аналогичного сконструированного генератора, который преобразует мощность двигателя в электрическую. Электродвигатели обычно генерируют вращающиеся движения, но они также могут использоваться для создания трансляционных движений (линейный привод). Электродвигатели используются для управления многими оборудованием, машинами и транспортными средствами.
Принцип действия
Электродвигатели — это устройства, которые преобразуют электрическую энергию в механическую энергию. Средствами этого преобразования энергии в электродвигателях является магнитное поле. Существуют различные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Основной принцип заключается в том, что описание того, как сила вызвано взаимодействием точечного электрического заряда q в электрическом и магнитном полях, является законом Лоренца:
где:
q: пунктуальный электрический заряд
E: Электрическое поле
v: скорость частиц
B: плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
Сила в этом случае определяется только зарядом q и электрическим полем E. Это кулоновская сила действует вдоль проводника, создающего электрический поток, например, в катушках статора индукционных машин или в роторе двигателей постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью нагрузки v. Эта сила перпендикулярна магнитному полю и направлению скорости нагрузки. Обычно в движении имеется много нагрузок, поэтому удобно переписать выражение в терминах плотности заряда Fv (сила в единице объема):
К продукту
он известен как плотность тока J (ампер на квадратный метр):Тогда полученное выражение описывает силу, возникающую при взаимодействии тока с магнитным полем:
Это основной принцип, объясняющий, как возникают силы в электромеханических системах, таких как электродвигатели. Однако полное описание для каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это по существу любой электродвигатель, который был «разворачиван», так что вместо создания крутящего момента (вращения) он создает прямолинейную силу вдоль своей длины.
Линейные двигатели чаще всего являются асинхронными двигателями или шаговыми двигателями. Линейные двигатели обычно встречаются во многих роликовых подстаканниках, где быстрое движение безмоторного вагона контролируется рельсом. Они также используются в поездах маглева, где поезд «летает» над землей. В меньших масштабах, в 1985 году эскалатор HP 7225A использовал два линейных шаговых двигателя для перемещения пера вдоль осей X и Y.
электромагнетизм
Сила и момент
Основная цель подавляющего большинства мировых электродвигателей состоит в том, чтобы электромагнитно индуцировать относительное перемещение в воздушном зазоре между статором и ротором для получения полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила обмоточного проводника может быть задана просто:
или в более общем плане, для обработки проводников с любой геометрией:
Наиболее общие подходы к вычислению сил в двигателях используют тензоры.
Мощность
Где rpm — скорость вала, а T — момент, механическая мощность двигателя Pem определяется,
в британских единицах с Т, выраженным в фунтах,
в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и Т, выраженной в Ньютонометрах,
Для линейного двигателя с силой F, выраженной в ньютонах и скоростью v, выраженной в метрах в секунду,
(Вт).В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора, пренебрегая скин-эффектом, определяется следующим:
Rr — сопротивление ротора
I r 2 — квадрат тока, индуцированного в роторе
s — проскальзывание двигателя; т.е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Назад emf
Так как обмотки якоря постоянного тока или универсального двигателя движутся через магнитное поле, они имеют индуцированное в них напряжение. Это напряжение имеет тенденцию противостоять напряжению питания двигателя и поэтому называется «назад электродвижущей силой (ЭДС)». Напряжение пропорционально скорости движения двигателя.Задняя ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны быть равны напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; результаты обратной волны в нижней части спины, и больше тока извлекается из питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для баланса новой нагрузки.
В компьютерах с переменным током иногда полезно учитывать источник обратной волны emf в машине; в качестве примера это вызывает особую озабоченность по поводу тесного регулирования скорости асинхронных двигателей на VFD.
потери
Потери двигателя связаны главным образом с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также возникают аэродинамические потери, особенно там, где присутствуют охлаждающие вентиляторы.
Потери также возникают при коммутации, искровых механических коммутаторах и электронных коммутаторах, а также рассеивают тепло.
КПД
Для расчета эффективности двигателя механическая выходная мощность делится на электрическую входную мощность:
где
является эффективность преобразования энергии, электрическая входная мощность, и механическая выходная мощность:где
это входное напряжение, входной ток, T — выходной крутящий момент, и — выходная угловая скорость. Аналитически можно получить точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента.Различные регулирующие органы во многих странах внедрили и внедрили законодательство, поощряющее производство и использование электродвигателей с более высокой эффективностью.
Коэффициент добротности
Эрик Лайтвейт предложил метрику, чтобы определить «доброту» электродвигателя:
Куда:
— площади поперечного сечения магнитной и электрической цепи
представляют собой длины магнитных и электрических цепей
является проницаемость сердечника
— это угловая частота, с которой двигатель
Из этого он показал, что наиболее эффективные двигатели, вероятно, будут иметь относительно большие магнитные полюса. Однако это уравнение относится только к моделям без ПМ.
Параметры производительности
Момент затяжки моторов
Все электромагнитные двигатели, которые включают в себя упомянутые здесь типы, вызывают крутящий момент от векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. Как только они были установлены путем математического анализа с использованием FEA или других инструментов, крутящий момент можно вычислить как интеграл всех векторов силы, умноженных на радиус каждого вектора. Ток, текущий в обмотке, создает поля, а для двигателя с использованием магнитного материала поле не линейно пропорционально току. Это затрудняет вычисление, но компьютер может выполнить многие расчеты.
Как только это будет сделано, цифра, связывающая ток с крутящим моментом, может использоваться как полезный параметр для выбора двигателя. Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя это, как правило, будет использоваться только до тех пор, пока термические соображения не будут иметь приоритет.
При оптимальном проектировании в пределах заданного ограничения насыщения ядра и для заданного активного тока (т. Е. Крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности потока воздушного зазора все категории электродвигателей или генераторы будут демонстрировать практически такой же максимальный непрерывный крутящий момент вала (т. е. рабочий крутящий момент) в заданной области воздушного зазора с обмотками и глубиной заднего железа, которая определяет физические размеры электромагнитного сердечника. В некоторых приложениях требуется крутящий момент за максимальный рабочий крутящий момент, такой как короткие всплески крутящего момента для ускорения электромобиля от остановки. Всегда ограниченные насыщением магнитного сердечника или безопасным повышением температуры и напряжением, способность к крутящим моментам за пределы максимального рабочего момента значительно отличается между категориями электродвигателей или генераторов.
Емкость для всплесков крутящего момента не следует путать с возможностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределы заданной частоты возбуждения. Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с регулируемыми по току полям и, следовательно, не может быть достигнуто с помощью двигателей с постоянными магнитами.
Электрические машины без топологии трансформаторной схемы, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента выше максимального расчетного момента без насыщения магнитного сердечника и любого увеличения тока как бесполезного. Кроме того, блок ПМСМ с постоянными магнитами может быть поврежден непоправимо, если попытки всплесков крутящего момента превышают максимальный крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как индукционные машины, индукционные двухкомпонентные электрические машины, а также индукционные или синхронные машины с двунаправленным раневым ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку активный ток, индуцированный ЭДС, на любом стороны трансформатора противостоят друг другу и, таким образом, не влияют на плотность магнитного потока магнитного сердечника, связанного с трансформатором, что в противном случае привело бы к насыщению ядра.
Электрические машины, которые полагаются на индукционные или асинхронные принципы, замыкают один порт схемы трансформатора, и в результате реактивный импеданс трансформаторной цепи становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (то есть реального) тока. Тем не менее реализуются всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент.
Синхронная двухсторонняя машина (BWRSDF) с бесколлекторным раневым ротором является единственной электрической машиной с истинно двухполярной топологией трансформаторной схемы (т.е. оба порта независимо возбуждены без короткого замыкания). Известно, что топология схемы с двумя портированными трансформаторами нестабильна и требует многофазного узла щетки скольжения для распространения ограниченной мощности на комплект обмотки ротора. Если бы имелись прецизионные средства для мгновенного регулирования угла крутящего момента и скольжения для синхронной работы во время движения или генерации при одновременном обеспечении бесщеточной мощности на намотке ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления схемы трансформатора и значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины. Рассчитаны крутящие моменты, превышающие восьмикратный рабочий крутящий момент.
Плотность непрерывного крутящего момента
Постоянная плотность крутящего момента обычных электрических машин определяется размером зоны воздушного зазора и глубиной заднего железа, которые определяются степенью мощности набора обмоток якоря, скоростью машины и достижимыми характеристиками воздушно- плотность потока зазоров до насыщения ядра. Несмотря на высокую коэрцитивность постоянных магнитов неодима или самария-кобальта, постоянная плотность крутящего момента практически одинакова среди электрических машин с оптимально разработанными намотками арматуры. Непрерывная плотность крутящего момента относится к способу охлаждения и допустимого периода эксплуатации перед разрушением при перегреве обмоток или повреждении постоянным магнитом.
Другие источники утверждают, что различные топологии e-machine имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм / кг) |
|---|---|
| SPM — бесщеточный переменного тока, токовая проводимость 180 ° | 1,0 |
| SPM — бесщеточный переменного тока, токовая проводимость 120 ° | 0.9-1.15 |
| IM, асинхронная машина | 0,7-1,0 |
| IPM, внутренняя машина с постоянными магнитами | 0,6-0,8 |
| VRM, машина с удвоенным показателем сопротивления | 0,7-1,0 |
где — удельная плотность крутящего момента нормализована до 1,0 для SPM — бесщеточный переменного тока, токовая проводимость 180 °, SPM — машина для поверхностного постоянного магнита.
Плотность крутящего момента примерно в четыре раза больше для электродвигателей, которые охлаждаются жидкостью, по сравнению с воздушными охлаждением.
Источник сравнения постоянного тока (DC), асинхронных двигателей (IM), синхронных двигателей с постоянными магнитами (PMSM) и переключаемых двигателей с сопротивлением (SRM) показал:
| Характеристика | Округ Колумбия | Я | PMSM | SRM |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Удельная мощность | 3 | 4 | 5 | 3,5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами до 1 МВт имеют значительно более высокую плотность крутящего момента, чем индукционные машины.
Непрерывная плотность мощности
Непрерывная плотность мощности определяется продуктом непрерывной плотности крутящего момента и постоянным диапазоном крутящего момента электрической машины.
Специальные магнитные двигатели
ротационный
Безрулевой или бесколлекторный роторный двигатель
Ничто в принципе ни одного из двигателей, описанных выше, не требует, чтобы железные (стальные) части ротора фактически вращались. Если мягкий магнитный материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Воспользовавшись этим фактом, используется бесконтактный или безредукторный двигатель постоянного тока, специализированный вариант постоянного двигателя постоянного тока. Оптимизированные для быстрого ускорения, эти двигатели имеют ротор, который построен без какого-либо железного сердечника. Ротор может иметь форму намоточного цилиндра или самонесущую конструкцию, содержащую только магнитную проволоку и связующий материал. Ротор может помещаться внутри магнитов статора; магнитно-мягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Вторая компоновка имеет корзину намотки ротора, окружающую магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Поскольку ротор намного легче по массе, чем обычный ротор, образованный из медных обмоток на стальных ламинатах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени в течение одного мс. Это особенно верно, если на обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, чтобы действовать как теплоотвод, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для бесконтактных двигателей постоянного тока. Современное программное обеспечение, такое как Motor-CAD, может помочь увеличить тепловой КПД двигателей, хотя и находится на стадии проектирования.
Среди этих типов — типы дисков-роторов, более подробно описанные в следующем разделе.
Вибрирующий сигнал сотовых телефонов иногда генерируется крошечными цилиндрическими типами полей с постоянными магнитами, но существуют также дискообразные типы, которые имеют тонкий многополярный магнит на диске, и преднамеренно неуравновешенную формованную пластиковую роторную структуру с двумя связанными бесколлекторными катушками. Металлические щетки и плоский коммутатор переключаются на катушки ротора.
Связанные приводы с ограниченным ходом не имеют сердечника и связанной катушки, размещенной между полюсами тонких постоянных магнитов с высоким потоком. Это быстрые позиционеры для жестких дисков (жестких дисков). Хотя современный дизайн значительно отличается от современного громкоговорителя, он все еще свободно (и неправильно) называется структурой «звуковой катушки», поскольку некоторые более ранние жесткие диски с дисковым накопителем перемещаются по прямым линиям и имеют структуру привода, громкоговорителя.
Блин или осевой роторный двигатель
Печатный якорь или двигатель блинчика имеют обмотки в виде диска, работающего между массивами магнитов с высоким потоком. Магниты расположены в окружности, обращенной к ротору, с промежутком между ними, чтобы образовать осевой воздушный зазор. Эта конструкция широко известна как двигатель блинчика из-за ее плоского профиля. У технологии было много фирменных наименований с момента ее создания, например ServoDisc.
Печатная арматура (первоначально сформированная на печатной плате) в печатном двигателе якоря выполнена из перфорированных медных листов, которые ламинируются вместе с использованием передовых композитов для образования тонкого жесткого диска.Печатная арматура имеет уникальную конструкцию в мире мостового мотора, поскольку она не имеет отдельного кольцевого коммутатора. Щетки запускаются непосредственно на поверхности якоря, что делает весь дизайн очень компактным.
Альтернативным методом изготовления является использование намотанной медной проволоки, уложенной плоской с центральным обычным коммутатором, в форме цветка и лепестка. Обмотки обычно стабилизируются с помощью электрических систем эпоксидной заливки. Это наполненные эпоксиды, которые имеют умеренную, смешанную вязкость и длительное время гелеобразования. Они выделяются низкой усадкой и низкой экзотермией и обычно UL 1446 признаются в качестве заливающего компаунда, изолированного по 180 ° C, класса H.
Уникальным преимуществом бесщеточных двигателей постоянного тока является отсутствие зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он абсолютно невозможен, хотя железные роторы ламинируются. Это может значительно повысить эффективность, но контроллеры с переменной скоростью должны использовать более высокую скорость переключения (& gt; 40 кГц) или постоянный ток из-за пониженной электромагнитной индукции.
Эти двигатели были первоначально изобретены для привода ведущих магнитных ленточных накопителей, где минимальное время для достижения рабочей скорости и минимальной остановки было критическим. Масляные моторы широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Благодаря разнообразию доступных конструкций технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) — использовать один статор, зажатый между двумя роторами. Одна такая конструкция обеспечивала максимальную мощность 15 кВт / кг, устойчивую мощность около 7,5 кВт / кг. Этот беспилотный двигатель с осевым потоком имеет более короткий путь потока, удерживая магниты дальше от оси. Конструкция позволяет иметь нулевой обмотки; 100 процентов обмоток активны. Это усиливается благодаря использованию медной проволоки прямоугольного сечения. Двигатели могут быть сложены для параллельной работы.Нестабильность сводится к минимуму за счет того, что два диска ротора накладывают равные и противоположные силы на диск статора. Роторы соединены непосредственно друг с другом через кольцо вала, отменяя магнитные силы.
Двигатели Magnax имеют диаметр от 15 до 5,4 метра (5,9 дюйма на 17 футов 8,6 дюйма).
Серводвигатель
Сервомотор — это двигатель, который часто продается как полный модуль, который используется в системе управления с обратной связью по положению или скорости.Сервомоторы используются в таких применениях, как станки, пленочные плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизме, должны иметь хорошо документированные характеристики для скорости, крутящего момента и мощности. Кривая скорости и крутящего момента очень важна и имеет высокое соотношение для серводвигателя. Также важны динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность петли сервомеханизма. Большие, мощные, но медленно реагирующие серво-петли могут использовать обычные двигатели переменного или постоянного тока и системы привода с обратной связью по положению или скорости на двигателе. По мере увеличения требований к динамическому реагированию используются более специализированные конструкции двигателей, такие как бесконтактные двигатели.Превосходные характеристики мощности и ускорения электродвигателей переменного тока по сравнению с двигателями постоянного тока имеют тенденцию поддерживать синхронные приводы с постоянным магнитом, BLDC, индукционные и SRM-приводы.
Сервосистема отличается от некоторых применений шагового двигателя тем, что обратная связь по положению постоянно, пока двигатель работает. Шаговая система по своей сути работает с разомкнутым контуром — полагаясь на двигатель, чтобы не «пропустить шаги» для краткосрочной точности — с любой обратной связью, такой как «домашний» переключатель или датчик положения, являющийся внешним по отношению к двигательной системе. Например, при запуске типичного компьютерного принтера с точечной матрицей его контроллер превращает привод шагового двигателя печатающей головки в его левый предел, где датчик положения определяет исходное положение и останавливается. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели являются часто используемым двигателем, когда требуются точные вращения. В шаговом двигателе внутренний ротор, содержащий постоянные магниты или магнитно-мягкий ротор с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронным способом. Шаговый двигатель можно также рассматривать как крест между электродвигателем постоянного тока и ротационным соленоидом. Когда каждая катушка включается поочередно, ротор выравнивается с магнитным полем, создаваемым обмоткой возбужденного поля. В отличие от синхронного двигателя, при его применении шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — начинается, а затем быстро останавливается снова — от одного положения к другому, когда обмотки возбуждения возбуждаются и обесточиваются последовательно. В зависимости от последовательности ротор может поворачиваться вперед или назад, и он может в любое время изменять направление, останавливаться, ускоряться или замедляться.
Простые драйверы шагового двигателя полностью активируют или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому колесу» к ограниченному числу положений;более сложные драйверы могут пропорционально управлять мощностью обмоток поля, позволяя роторам располагаться между точками зубчатого колеса и тем самым вращаться чрезвычайно плавно. Этот режим работы часто называют микрошагом. Управляемые компьютером шаговые двигатели являются одной из самых универсальных форм позиционирующих систем, особенно в части цифровой сервоуправляемой системы.
Шаговые двигатели можно легко поворачивать под определенным углом дискретными шагами, и, следовательно, шаговые двигатели используются для позиционирования головки чтения / записи в дисководах гибких дисков. Они использовались с той же целью в компьютерных дисках в эпоху до гигабайта, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи на жестком диске.По мере увеличения плотности дисков ограничения скорости и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными, поэтому новые жесткие диски используют системы с головным приводом с голосовой катушкой. (Термин «звуковая катушка» в этой связи является историческим, он относится к структуре в типичном (коническом) громкоговорителе. Эта структура использовалась некоторое время для размещения головок. Современные приводы имеют поворотную катушку, катушки качания назад и вперед, что-то вроде лопасти вращающегося вентилятора. Тем не менее, как звуковая катушка, современные проводники катушки привода (магнитный провод) движутся перпендикулярно силовым линиям магнитного поля.)
Шаговые двигатели использовались и по-прежнему часто используются в компьютерных принтерах, оптических сканерах и цифровых фотокопировальных устройствах для перемещения оптического сканирующего элемента, каретки печатающей головки (точечной матрицы и струйных принтеров) и валиков или подающих роликов. Аналогично, многие компьютерные плоттеры (которые с начала 1990-х годов были заменены крупноформатными струйными и лазерными принтерами) использовали вращающиеся шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с замкнутым контуром.
Так называемые кварцевые аналоговые наручные часы содержат наименьшие обычные шаговые двигатели; они имеют одну катушку, набирают очень мало энергии и имеют постоянный магнитный ротор. Такой же двигатель работает от кварцевых часов с батарейным питанием. Некоторые из этих часов, например, хронографы, содержат более одного шагового двигателя.
Тесно связанные с проектированием трехфазные синхронные двигатели переменного тока, шаговые двигатели и SRM классифицируются как тип двигателя с переменным сопротивлением. Шаговые двигатели были и остаются часто используемыми в компьютерных принтерах, оптических сканерах и компьютерах с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резцы и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда.Обычно электростатические двигатели сочетаются с обычными моторами на катушках.Обычно они требуют высоковольтного источника питания, хотя очень маленькие двигатели используют более низкие напряжения. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют большого тока при низких напряжениях. В 1750-е годы первые электростатические двигатели были разработаны Бенджамином Франклином и Эндрю Гордоном. Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (МЭМС), где их приводные напряжения составляют менее 100 вольт, а движущиеся заряженные пластины намного легче изготавливать, чем катушки и железные сердечники. Кроме того, молекулярный механизм, который управляет живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезомотор — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для того, чтобы сделать ряд растяжек и удерживание положения, подобно тому, как движется гусеница.
В двигательной силовой установке с электрическим приводом используется технология электродвигателей для запуска космических аппаратов в космическом пространстве, причем большинство систем основано на электрическом питании пропеллента на высокой скорости, причем некоторые системы основаны на принципах электродинамической привязки движений к магнитосфере.
Поделиться ссылкой:
- Нажмите, чтобы поделиться на Twitter (Открывается в новом окне)
- Нажмите здесь, чтобы поделиться контентом на Facebook. (Открывается в новом окне)
- Нажмите, чтобы поделиться записями на Pinterest (Открывается в новом окне)
- Нажмите, чтобы поделиться записями на Tumblr (Открывается в новом окне)
- Нажмите, чтобы поделиться на LinkedIn (Открывается в новом окне)
- Нажмите, чтобы поделиться в WhatsApp (Открывается в новом окне)
- Нажмите, чтобы поделиться в Skype (Открывается в новом окне)
- Нажмите, чтобы поделиться в Telegram (Открывается в новом окне)
- Нажмите, чтобы поделиться на Reddit (Открывается в новом окне)
- Нажмите, чтобы поделиться записями на Pocket (Открывается в новом окне)
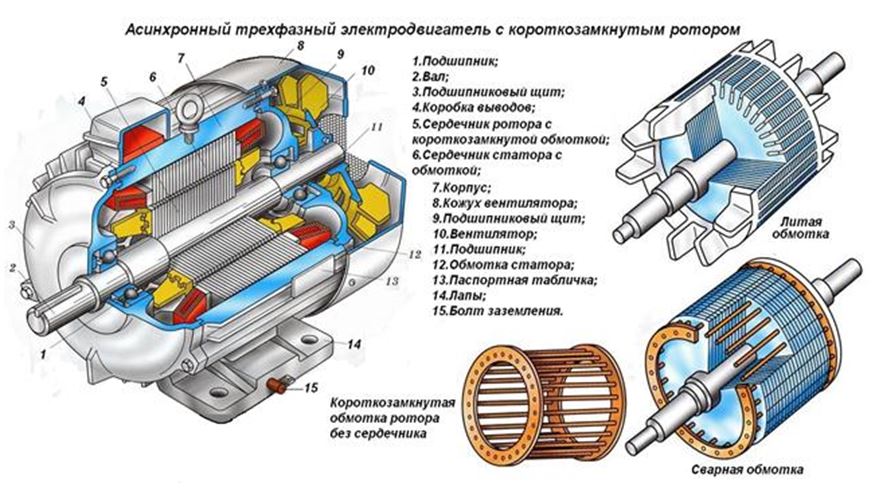
Принцип работы электродвигателя асинхронного типа
Электрический двигатель асинхронного типа это самая распространенная электроустановка, применяемая в строительной, промышленной, сельскохозяйственной сфере и быту. Главные преимущества, которыми наделены асинхронные электродвигатели (АД) по сравнению с прочими типами это – надежность, простота конструкции и относительная дешевизна.
Электродвигатель асинхронного типа состоит из следующих составляющих:
- корпуса;
- статора;
- ротора;
- обмоток;
- магнитопровода.
Электроэнергия преобразуется в механическую благодаря вращению подвижного элемента двигателя – ротора.
Принцип действия
Вследствие подаваемого на обмотки статора напряжения возникает магнитное поле (МП), которое при прохождении роторной обмотки наводит в ней электродвижущую силу (ЭДС), что приводит к вращению двигателя. Под воздействием ЭДС по медной обмотке электродвигателя происходит движение электрического тока, который взаимодействует с магнитным потоком. При взаимодействии МП статора с электротоком ротора возникает вращающийся момент, благодаря которому происходит движение сердечника в том же направлении что и магнитное поле.
Особенность АД заключается в том, что возникновение электродвижущей силы в обмотках ротора возможно лишь при разнице частот вращения МП ротора и статора. Данная разница и создает момент вращения асинхронного двигателя.
В настоящее время классическую конструкцию АД с короткозамкнутым ротором активно вытесняют энергоэффективные установки с улучшенными характеристиками и более высоким КПД. Из вышесказанного видно, что для вращения ротора электродвигателя асинхронного типа напряжение и магнитный поток статора должны быть равны переменному току, используемому в электросетях.
Использование энергоэффективных асинхронных электродвигателей вместе с частотно-регулируемыми приводами дает прекрасную возможность значительно повысить энергетические показатели и существенно сократить затраты на электроэнергию.
Запишите принцип работы электромотора класса 12 по физике CBSE
Подсказка: Электродвигатель можно определить как электрическое устройство, которое преобразует электрическую энергию в механическую. Большинство электродвигателей работают на основе взаимодействия между магнитным полем электродвигателя и электрическим током в проволочной обмотке, что является основным принципом для создания силы в виде крутящего момента, приложенного к валу электродвигателя. Полный пошаговый ответ:
Электродвигатель работает по принципу магнитного воздействия тока.Его принцип заключается в том, что когда прямоугольная катушка помещается в магнитное поле и через нее пропускается ток, катушка вращается в результате сил, действующих на катушку.
Следующие части являются частями электродвигателя:
Источник питания постоянного тока: это компонент, в котором генерируется рабочий источник энергии.
Коммутатор: направление электрического источника, обеспечиваемого источником питания, поддерживается этой частью электродвигателя.
Якорь ротора: он непрерывно вращается при работающем двигателе.Он также предназначен для помощи в перемещении и подаче электроэнергии на другие части двигателя и транспортного средства.
Ось: Ось электрического транспортного средства содержит часть основного источника энергии, который обеспечивает возможность управления транспортным средством посредством рулевого управления и использования редуктора.
Полевой магнит: полевой магнит находится внутри электродвигателя и создает магнитное поле, которое позволяет внутреннему проводу катушки в двигателе постоянного тока вращаться.
Основная идея электродвигателя действительно очень проста: вы помещаете в него электричество с одного конца, а металлический стержень вращается на другом конце, давая вам возможность приводить в движение любую машину.
Примечание: Электродвигатели настолько важны, что влияют практически на все аспекты современной жизни. Холодильники, пылесосы, кондиционеры, вентиляторы, жесткие диски компьютеров, автоматические стеклоподъемники и многие другие приборы и устройства используют электродвигатели для преобразования электрической энергии в полезную механическую энергию.
Принцип электродвигателя — HiSoUR — Hi So You Are
🔊 АудиочтениеЭлектродвигатель — это электромеханический преобразователь (электрическая машина), преобразующий электрическую энергию в механическую.В обычных электродвигателях генерируются магнитные поля в катушках с токонесущими проводниками, силы взаимного притяжения и отталкивания которых реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую. Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для поступательных движений (линейный привод). Электродвигатели используются для привода многих видов оборудования, машин и транспортных средств.
Принцип действия
Электродвигатели — это устройства, преобразующие электрическую энергию в механическую. Средством преобразования энергии в электродвигателях является магнитное поле. Существуют разные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Фундаментальный принцип, который описывает, как сила вызывается взаимодействием точечного электрического заряда q в электрическом и магнитном полях, — это закон Лоренца:
куда:
q: точечный электрический заряд
E: электрическое поле
v: скорость частицы
B: плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
Сила в этом случае определяется только зарядом q и электрическим полем E.Это кулоновская сила, которая действует вдоль проводника, порождающего электрический поток, например, в катушках статора асинхронных машин или в роторе двигателей постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью груза v. Эта сила перпендикулярна магнитному полю и направлению скорости груза. Обычно в движении находится много грузов, поэтому выражение удобно переписать в терминах плотности заряда Fv (сила на единицу объема):
Для продукта это известно как плотность тока J (ампер на квадратный метр):
Тогда полученное выражение описывает силу, создаваемую взаимодействием тока с магнитным полем:
Это основной принцип, объясняющий, как силы возникают в электромеханических системах, таких как электродвигатели.Однако полное описание каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это, по сути, любой электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Линейные двигатели обычно используются во многих американских горках, где быстрое движение безмоторного железнодорожного вагона контролируется рельсом.Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Электромагнетизм
Сила и крутящий момент
Основная цель подавляющего большинства электродвигателей в мире — электромагнитное возбуждение относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила проводника обмотки может быть просто выражена как:
или, в более общем смысле, для работы с проводниками любой геометрии:
В наиболее общих подходах к вычислению сил в двигателях используются тензоры.
Мощность
Где об / мин — это частота вращения вала, а T — крутящий момент, механическая выходная мощность двигателя Pem определяется выражением
в британских единицах с T, выраженным в фут-фунтах,
(лошадиные силы), а,в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и Т, выраженной в ньютон-метрах, (Вт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду, (Вт).
В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта определяется следующим образом:, где
Rr — сопротивление ротора
I r 2 — квадрат индуцированного тока в роторе
s — пробуксовка мотора; я.е., разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Задняя ЭДС
Поскольку обмотки якоря двигателя постоянного тока или универсального двигателя движутся через магнитное поле, в них возникает индуцированное напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Обратная ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках.Это обеспечивает основной механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате возникает ЭДС нижней части спины, и больше тока потребляется от источника питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для уравновешивания новой нагрузки.
В машинах переменного тока иногда полезно учитывать источник обратной ЭДС внутри машины; Например, это особенно важно при точном регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери двигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также аэродинамическими потерями, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искрообразовании в механических коммутаторах и электронных коммутаторах, а также при рассеивании тепла.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую:
где — эффективность преобразования энергии, — входная электрическая мощность и — механическая выходная мощность:
где входное напряжение, входной ток, T выходной крутящий момент и выходная угловая скорость.Можно аналитически вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента при остановке.
Различные регулирующие органы во многих странах приняли и внедрили законы, поощряющие производство и использование электродвигателей с более высоким КПД.
Фактор качества
Эрик Лейтуэйт предложил метрику для определения «качества» электродвигателя:
Где:
— коэффициент качества (коэффициенты выше 1, вероятно, будут эффективными)— площади поперечного сечения магнитной и электрической цепи
— длины магнитной и электрической цепей
— проницаемость сердечника
— угловая частота двигатель приводится в движение
Исходя из этого, он показал, что наиболее эффективные двигатели, вероятно, будут иметь относительно большие магнитные полюса.Однако это уравнение напрямую относится только к двигателям без ПМ.
Рабочие параметры
Допустимый крутящий момент типов двигателей
Все электромагнитные двигатели, включая упомянутые здесь типы, получают крутящий момент из векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. После того, как они были установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть вычислен как интеграл всех векторов силы, умноженный на радиус каждого вектора.Ток, протекающий в обмотке, создает поля, и для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это затрудняет расчет, но компьютер может выполнить множество необходимых расчетов.
Как только это будет сделано, число, связывающее ток с крутящим моментом, можно использовать в качестве полезного параметра для выбора двигателя. Максимальный крутящий момент двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока не будут преобладать тепловые соображения.
При оптимальном проектировании в пределах заданного ограничения насыщения сердечника и для заданного активного тока (т. Е. Тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности магнитного потока в воздушном зазоре, все категории электрических двигатели или генераторы будут демонстрировать практически одинаковый максимальный непрерывный крутящий момент на валу (т. е. рабочий крутящий момент) в пределах заданной области воздушного зазора с пазами обмотки и глубиной задней части, которая определяет физический размер электромагнитного сердечника.Для некоторых приложений требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность к скачкам крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.
Не следует путать способность выдерживать скачки крутящего момента с возможностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределами расчетной частоты возбуждения.Ослабление поля выполняется, когда максимальная скорость не может быть достигнута путем увеличения приложенного напряжения. Это относится только к двигателям с полями, управляемыми током, и поэтому не может быть достигнуто с двигателями с постоянными магнитами.
Электрические машины без трансформаторной топологии схемы, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента, превышающие максимальный расчетный крутящий момент, без насыщения магнитного сердечника и без того, чтобы любое увеличение тока было бесполезным. Кроме того, узел постоянного магнита PMSM может быть непоправимо поврежден, если будут предприняты попытки увеличения крутящего момента, превышающего максимально допустимый рабочий крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как асинхронные машины, индукционные электрические машины с двойным питанием и асинхронные или синхронные машины с двойным питанием с фазным ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку наведенный ЭДС активный ток на обе стороны трансформатора противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника трансформатора, что в противном случае привело бы к насыщению сердечника.
Электрические машины, основанные на индукционных или асинхронных принципах, закорачивают один порт цепи трансформатора, и в результате реактивное сопротивление цепи трансформатора становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (т.е.е., реальный) ток. Тем не менее, всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент, возможны.
Бесщеточная машина с синхронным двойным питанием с фазным ротором (BWRSDF) — единственная электрическая машина с действительно двухпортовой топологией трансформаторной схемы (т. Е. Оба порта возбуждаются независимо без короткозамкнутого порта). Топология схемы с двумя портами трансформатора, как известно, нестабильна и требует многофазного узла контактного кольца-щетки для передачи ограниченной мощности на обмотку ротора.Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время движения или генерации с одновременной подачей бесщеточной энергии на обмотку ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины, были бы возможны.Были рассчитаны всплески крутящего момента, превышающие рабочий крутящий момент в восемь раз.
Плотность постоянного крутящего момента
Плотность постоянного крутящего момента обычных электрических машин определяется размером области воздушного зазора и глубиной задней части, которые определяются номинальной мощностью комплекта обмотки якоря, скоростью машины, и достижимая плотность потока в воздушном зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу постоянных магнитов из неодима или самария-кобальта, постоянная плотность крутящего момента практически одинакова для электрических машин с оптимально спроектированными наборами обмоток якоря.Постоянная плотность крутящего момента относится к способу охлаждения и допустимому периоду эксплуатации до разрушения из-за перегрева обмоток или повреждения постоянного магнита.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм / кг) |
|---|---|
| SPM — бесщеточный переменный ток, токопроводимость 180 ° | 1,0 |
| SPM — бесщеточный переменный ток, токопроводимость 120 ° | 0.9-1,15 |
| ИМ, асинхронная машина | 0,7–1,0 |
| IPM, машина с внутренним постоянным магнитом | 0,6-0,8 |
| VRM, машина двойного вылета | 0,7–1,0 |
где — удельная плотность крутящего момента нормирована на 1,0 для SPM — бесщеточный переменный ток, токопроводимость 180 °, SPM — это машина с поверхностным постоянным магнитом.
Плотность крутящего момента для электродвигателей с жидкостным охлаждением примерно в четыре раза больше, чем для электродвигателей с воздушным охлаждением.
Источник, сравнивающий постоянный ток (DC), асинхронные двигатели (IM), синхронные двигатели с постоянными магнитами (PMSM) и реактивные реактивные двигатели (SRM), показал:
| Характеристика | постоянного тока | IM | PMSM | SRM |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Плотность мощности | 3 | 4 | 5 | 3.5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами мощностью до 1 МВт имеют значительно более высокую плотность крутящего момента, чем асинхронные машины.
Постоянная плотность мощности
Постоянная плотность мощности определяется произведением постоянной плотности крутящего момента и диапазона скорости постоянного крутящего момента электрической машины.
Специальные магнитные двигатели
Поворотный
Двигатель с ротором без сердечника или без сердечника
Принципиально ни один из двигателей, описанных выше, не требует, чтобы железные (стальные) части ротора действительно вращались.Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта — двигатель постоянного тока без сердечника или железа, специализированная форма двигателя постоянного тока с постоянными магнитами. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра или самонесущей конструкции, содержащей только магнитный провод и связующий материал.Ротор может помещаться внутри магнитов статора; магнитомягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во втором устройстве корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитомягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для магнитного потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее одной мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника. Современное программное обеспечение, такое как Motor-CAD, может помочь повысить тепловой КПД двигателей еще на стадии проектирования.
Среди этих типов есть типы дискового ротора, более подробно описанные в следующем разделе.
Виброзвонок сотовых телефонов иногда генерируется крошечными цилиндрическими типами постоянного магнита, но есть также дискообразные типы, которые имеют тонкий многополярный дисковый магнит поля и намеренно несбалансированную конструкцию ротора из формованного пластика с двумя соединенными катушками без сердечника. . Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и катушки, размещенной между полюсами тонких постоянных магнитов с высокой магнитной индукцией.Это быстрые позиционеры головки для жестких дисков («жестких дисков»). Хотя современный дизайн значительно отличается от громкоговорителей, он все еще свободно (и неправильно) называется структурой «звуковой катушки», потому что некоторые более ранние головки жестких дисков двигались по прямым линиям и имели структуру привода, очень похожую на что из громкоговорителя.
Двигатель с цилиндрическим или осевым ротором
Якорь с печатным рисунком или двигатель с осевым ротором имеет обмотки в форме диска, перемещающегося между массивами магнитов с большим магнитным потоком.Магниты расположены по кругу напротив ротора с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее плоского профиля. С момента своего создания у технологии было много торговых марок, таких как ServoDisc.
Якорь с печатным рисунком (первоначально сформированный на печатной плате) в двигателе с печатным рисунком якоря изготовлен из перфорированных медных листов, которые ламинированы вместе с использованием современных композитных материалов для образования тонкого жесткого диска. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора.Щетки движутся непосредственно по поверхности якоря, что делает всю конструкцию очень компактной.
Альтернативный метод производства заключается в использовании намотанного медного провода, уложенного плоско с центральным обычным коммутатором, в форме цветка и лепестка. Обмотки обычно стабилизируются электрическими системами заливки эпоксидной смолой. Это эпоксидные смолы с наполнителем, которые имеют умеренную смешанную вязкость и длительное время гелеобразования. Они отличаются низкой усадкой и низким экзотермическим эффектом и, как правило, признаны UL 1446 в качестве заливочного компаунда с изоляцией до 180 ° C, класс H.
Уникальным преимуществом двигателей постоянного тока без железа является отсутствие зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он полностью не содержит железа, хотя железные роторы являются слоистыми. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую частоту переключения (> 40 кГц) или постоянный ток из-за уменьшения электромагнитной индукции.
Изначально эти двигатели были изобретены для привода приводов магнитных лентопротяжных устройств, где минимальное время для достижения рабочей скорости и минимальный тормозной путь были критическими.Блинные двигатели широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) заключается в использовании одного статора, зажатого между двумя роторами. Одна такая конструкция обеспечивает пиковую мощность 15 кВт / кг, постоянную мощность около 7,5 кВт / кг. Этот двигатель с осевым потоком без ярма обеспечивает более короткий путь потока, удерживая магниты дальше от оси.Конструкция позволяет иметь нулевой вылет обмотки; Активны 100 процентов обмоток. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели можно штабелировать для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора прикладывают равные и противоположные силы к диску статора. Роторы соединены напрямую друг с другом через кольцо вала, что нейтрализует магнитные силы.
ЭлектродвигателиMagnax имеют диаметр от 15 до 5,4 метра (от 5,9 до 17 футов 8,6 дюйма).
Серводвигатель
Серводвигатель — это двигатель, который очень часто продается в виде готового модуля, который используется в системе управления положением или скоростью с обратной связью. Серводвигатели используются в таких приложениях, как станки, перьевые плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и является высоким соотношением для серводвигателя. Также важны характеристики динамического отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность контура сервомеханизма.В больших, мощных, но медленно реагирующих сервоконтурах могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости на двигателе. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходная удельная мощность и характеристики ускорения двигателей переменного тока по сравнению с двигателями постоянного тока имеют тенденцию способствовать применению синхронных приводов с постоянными магнитами, постоянного тока постоянного тока, индукции и SRM.
Сервосистема отличается от некоторых приложений с шаговыми двигателями тем, что обратная связь по положению является непрерывной во время работы двигателя.Шаговая система по своей сути работает с разомкнутым контуром — полагаясь на двигатель, который не «пропускает шаги» для кратковременной точности — с любой обратной связью, такой как «исходный» переключатель или датчик положения, являющиеся внешними по отношению к двигательной системе. Например, когда запускается типичный компьютерный принтер с точечной матрицей, его контроллер заставляет шаговый двигатель печатающей головки приводиться к левому пределу, где датчик положения определяет исходное положение и останавливает шаг. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели — это тип двигателя, который часто используется, когда требуется точное вращение. В шаговом двигателе внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явными полюсами управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается и затем быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности, ротор может вращаться вперед или назад, и он может произвольно менять направление, останавливаться, ускоряться или замедляться в любое время.
Простые драйверы шагового двигателя полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатой передаче» в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками зубчатых колес и, таким образом, вращаться чрезвычайно плавно.Такой режим работы часто называют микрошагом. Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателиможно легко поворачивать на определенный угол дискретными шагами, и, следовательно, шаговые двигатели используются для позиционирования головки чтения / записи в дисководах компьютерных гибких дисков. Они использовались для той же цели в компьютерных дисковых накопителях до гигабайтной эпохи, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи жесткого диска.По мере увеличения плотности накопителей ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — таким образом, в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре в типичном (конусном) громкоговорителе. Эта структура некоторое время использовалась для размещения головок. Современные приводы имеют поворотное крепление катушки; катушка качается вперед-назад, что-то вроде лопасти вращающегося вентилятора.Тем не менее, подобно звуковой катушке, современные проводники катушки исполнительного механизма (магнитный провод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигателибыли и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров), а также валика или подающих роликов. Точно так же многие компьютерные плоттеры (которые с начала 1990-х были заменены широкоформатными струйными и лазерными принтерами) использовали роторные шаговые двигатели для перемещения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; у них одна катушка, они потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока, шаговые двигатели и SRM классифицируются как двигатели с регулируемым сопротивлением. Шаговые двигатели были и до сих пор часто используются в компьютерных принтерах, оптических сканерах и станках с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резаки и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями с катушкой. Обычно для них требуется высоковольтный источник питания, хотя в очень маленьких двигателях требуется более низкое напряжение. Вместо этого обычные электродвигатели используют магнитное притяжение и отталкивание и требуют высокого тока при низких напряжениях. В 1750-х годах первые электростатические двигатели были разработаны Бенджамином Франклином и Эндрю Гордоном.Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (МЭМС), где их управляющее напряжение ниже 100 вольт, а при движении заряженные пластины гораздо проще изготовить, чем катушки и железные сердечники. Кроме того, молекулярные механизмы, управляющие живыми клетками, часто основаны на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезодвигатель — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для последовательного растяжения и удержания положения, подобно тому, как движется гусеница.
В двигательной установке космического корабля с электроприводом используется технология электродвигателя для приведения космического корабля в космическое пространство, большинство систем основано на электрическом приводе ракетного топлива на высокую скорость, а некоторые системы основаны на принципах электродинамического троса для движения к магнитосфере.
Источник из Википедии
Электродвигатель — двигатель постоянного тока, типы двигателей постоянного тока, двигатели переменного тока, принципы работы трехфазного двигателя — электрические, магнитные, полевые и полевые
Электродвигатель — это машина, используемая для преобразования электрической энергии в механическую энергию. Электродвигатели чрезвычайно важны для современной жизни, они используются во многих различных местах, например, в пылесосах, посудомоечных машинах, компьютерных принтерах, факсах, кассетных магнитофонах, станках , печатных прессах, автомобилях, системах метро и т. Д. очистных сооружений станций и водопроводных насосных станций.
Основные физические принципы работы электродвигателя известны как закон Ампера и закон Фарадея. Первая гласит, что электрический проводник, находящийся в магнитном поле, будет испытывать силу , если какой-либо ток, протекающий через проводник, имеет компонент, расположенный под прямым углом к этому полю. Изменение направления тока или магнитного поля приведет к возникновению силы, действующей в противоположном направлении. Второй принцип гласит, что если проводник перемещается через магнитное поле, то любой компонент движения , перпендикулярный этому полю, будет генерировать разность потенциалов между концами проводника.
Электродвигатель состоит из двух основных элементов. Первый, статический компонент, который состоит из магнитных материалов и электрических проводников для создания магнитных полей желаемой формы, известен как статор . Второй, который также сделан из магнитных и электрических проводников для создания определенных магнитных полей, которые взаимодействуют с полями, создаваемыми статором, известен как ротор . Ротор содержит подвижный компонент двигателя, имеющий вращающийся вал для соединения с приводимой в действие машиной и некоторые средства поддержания электрического контакта между ротором и корпусом двигателя (обычно угольных щеток , прижатых к контактным кольцам).В процессе работы электрический ток, подаваемый на двигатель, используется для создания магнитных полей как в роторе, так и в статоре. Эти поля сталкиваются друг с другом, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Электродвигатели делятся на две большие категории, в зависимости от типа применяемой электроэнергии: двигатели постоянного (DC) и переменного (AC) тока.
Первый электродвигатель постоянного тока был продемонстрирован Майклом Фарадеем в Англии в 1821 году.Поскольку единственными доступными электрическими источниками был постоянный ток, первые коммерчески доступные двигатели были электродвигателями постоянного тока, которые стали популярными в 1880-х годах. Эти двигатели использовались как для маломощных, так и для больших мощностей, таких как электрические уличные железные дороги. Только в 1890-х годах, когда появилась электроэнергия переменного тока, двигатель переменного тока был разработан, в первую очередь, корпорациями Westinghouse и General Electric. В течение этого десятилетия было решено большинство проблем, связанных с однофазными и многофазными двигателями переменного тока.Следовательно, к 1900 году были разработаны все основные характеристики электродвигателей.
Электродвигатель | Encyclopedia.com
Двигатель постоянного тока
Типы двигателей постоянного тока
Двигатели переменного тока
Принципы работы трехфазного двигателя
Ресурсы
Электродвигатель — это машина, используемая для преобразования электрической энергии в механическую. Электродвигатели важны для современной жизни, они используются в пылесосах, посудомоечных машинах, компьютерных принтерах, факсах, водяных насосах, производстве, автомобилях (как обычных, так и гибридных), станках, печатных станках, системах метро и т. Д.
Основные физические принципы работы электродвигателя известны как закон Ампера и закон Фарадея. Первая гласит, что электрический проводник, находящийся в магнитном поле, будет испытывать силу, если любой ток, протекающий через проводник, имеет компонент, расположенный под прямым углом к этому полю. Изменение направления тока или магнитного поля приведет к возникновению силы, действующей в противоположном направлении. Второй принцип гласит, что если проводник перемещается через магнитное поле, то любой компонент движения, перпендикулярный этому полю, будет создавать разность потенциалов между концами проводника.
Электродвигатель состоит из двух основных элементов. Первый, статический компонент, который состоит из магнитных материалов и электрических проводников для создания магнитных полей желаемой формы, известен как статор . Второй, который также сделан из магнитных и электрических проводников для создания определенных магнитных полей, которые взаимодействуют с полями, создаваемыми статором, известен как ротор . Ротор содержит движущийся компонент двигателя, имеющий вращающийся вал для соединения с приводимой в действие машиной и некоторые средства поддержания электрического контакта между ротором и корпусом двигателя (обычно угольные щетки, прижатые к контактным кольцам).В процессе работы электрический ток, подаваемый на двигатель, используется для создания магнитных полей как в роторе, так и в статоре. Эти поля сталкиваются друг с другом, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Электродвигатели делятся на две большие категории, в зависимости от типа применяемой электроэнергии: двигатели постоянного (DC) и переменного (AC) тока.
Первый электродвигатель постоянного тока был продемонстрирован Майклом Фарадеем в Англии в 1821 году.Поскольку единственными доступными электрическими источниками был постоянный ток, первые коммерчески доступные двигатели были электродвигателями постоянного тока, которые стали популярными в 1880-х годах. Эти двигатели использовались как для маломощных, так и для больших мощностей, таких как электрические уличные железные дороги. Только в 1890-х годах, когда появилась электроэнергия переменного тока, двигатель переменного тока был разработан, в первую очередь, корпорациями Westinghouse и General Electric. В течение этого десятилетия было решено большинство проблем, связанных с однофазными и многофазными двигателями переменного тока.Следовательно, все основные характеристики электродвигателей были разработаны к 1900 году.
Работа двигателя постоянного тока зависит от взаимодействия полюсов статора с частью ротора или якоря. Статор содержит четное количество полюсов переменной магнитной полярности, каждый полюс состоит из электромагнита, образованного из обмотки полюса, намотанной на сердечник полюса. Когда через обмотку протекает постоянный ток, создается магнитное поле. Якорь также содержит обмотку, в которой ток течет в указанном направлении.Этот ток якоря взаимодействует с магнитным полем в соответствии с законом Ампера, создавая крутящий момент, который поворачивает якорь.
Если бы обмотки якоря вращались вокруг следующего полюса противоположной полярности, крутящий момент действовал бы в противоположном направлении, останавливая якорь. Чтобы предотвратить это, ротор содержит коммутатор, который изменяет направление тока якоря для каждого полюсного наконечника, мимо которого вращается якорь, таким образом гарантируя, что все обмотки, проходящие, например, через полюс северной полярности, будут иметь ток, протекающий в в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, чтобы создать крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами.Коммутатор обычно состоит из разъемного контактного кольца, по которому движутся щетки, протекающие по постоянному току.
Вращение обмоток якоря через поле статора создает напряжение на якоре, известное как противо-ЭДС (электродвижущая сила), поскольку оно противодействует приложенному напряжению: это следствие закона Фарадея. Величина противо-ЭДС зависит от напряженности магнитного поля и скорости вращения якоря. При первоначальном включении двигателя постоянного тока нет противодействия ЭДС, и якорь начинает вращаться.Счетчик ЭДС увеличивается с вращением. Действующее напряжение на обмотках якоря — это приложенное напряжение за вычетом противо-ЭДС.
Двигатели постоянного тока встречаются чаще, чем мы думаем. Автомобиль может иметь до 20 двигателей постоянного тока для привода вентиляторов, сидений и окон. Они бывают трех разных типов, классифицируемых в зависимости от используемой электрической схемы. В параллельном двигателе якорь и обмотка возбуждения соединены параллельно, поэтому токи через каждую из них относительно независимы.Ток через обмотку возбуждения можно регулировать с помощью реостата возбуждения (переменного резистора), что позволяет изменять скорость двигателя в широких пределах в широком диапазоне условий нагрузки. Этот тип двигателя используется для привода станков или вентиляторов, для которых требуется широкий диапазон скоростей.
В последовательном двигателе обмотка возбуждения соединена последовательно с обмоткой якоря, что приводит к очень высокому пусковому моменту, поскольку как ток якоря, так и напряженность поля максимальны.Однако, как только якорь начинает вращаться, противо-ЭДС снижает ток в цепи, тем самым уменьшая напряженность поля. Серийный двигатель используется там, где требуется большой пусковой крутящий момент, например, в автомобильных стартерах, кранах и подъемниках.
Составной двигатель представляет собой комбинацию последовательного и параллельного двигателей с параллельными и последовательными обмотками возбуждения. Этот тип двигателя имеет высокий пусковой момент и способность изменять скорость и используется в ситуациях, требующих обоих этих свойств, таких как пробивные прессы, конвейеры и лифты.Двигатели переменного тока
встречаются гораздо чаще, чем двигатели постоянного тока, потому что почти все системы электроснабжения работают с переменным током. Существует три основных типа двигателей: многофазные асинхронные, многофазные синхронные и однофазные. Поскольку трехфазные источники питания являются наиболее распространенными многофазными источниками, большинство многофазных двигателей работают от трехфазных. Трехфазные источники питания широко используются в коммерческих и промышленных условиях, тогда как однофазные источники питания почти всегда используются в домашних условиях.
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в корпусе переменного тока. Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля. Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения. По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в пределах цикла тока, тот полюс поля, магнитное поле которого является наибольшим, постоянно изменяется между тремя полюсами, в результате чего магнитное поле, видимое ротором, вращается.Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и количества полюсов, создаваемых обмоткой статора. Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3 600 об / мин.
В трехфазном асинхронном двигателе обмотки ротора не подключены к источнику питания, но
Ключевые термины
AC — Переменный ток, при котором ток, проходящий через цепь, меняет направление потока через равные промежутки времени.
DC— Постоянный ток, при котором ток в цепи примерно постоянен во времени.
Ротор— Та часть электродвигателя, которая может свободно вращаться, включая вал, якорь и связь с машиной.
Статор — Та часть электродвигателя, которая не может вращаться, включая катушки возбуждения.
Крутящий момент — Способность или сила, необходимые для поворота или скручивания вала или другого объекта.
по сути являются короткими замыканиями.Самый распространенный тип обмотки ротора, обмотка с короткозамкнутым ротором, очень похожа на ходовое колесо, используемое в клетках для домашних песчанок. Когда двигатель первоначально включен, а ротор неподвижен, проводники ротора испытывают изменяющееся магнитное поле, распространяющееся с синхронной скоростью. Согласно закону Фарадея, эта ситуация приводит к индукции токов вокруг обмоток ротора; величина этого тока зависит от импеданса обмоток ротора. Поскольку условия для работы двигателя теперь выполнены, то есть токопроводящие проводники находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться.Ротор никогда не может вращаться с синхронной скоростью, потому что не будет относительного движения между магнитным полем и обмотками ротора, и ток не может быть индуцирован. Асинхронный двигатель имеет высокий пусковой момент.
В двигателях с короткозамкнутым ротором скорость двигателя определяется нагрузкой, которую он передает, и числом полюсов, создающих магнитное поле в статоре. Если некоторые полюса включаются или выключаются, скорость двигателя можно регулировать с приращением. В двигателях с фазным ротором сопротивление обмоток ротора может быть изменено извне, что изменяет ток в обмотках и, таким образом, обеспечивает непрерывное регулирование скорости.
Трехфазные синхронные двигатели сильно отличаются от асинхронных двигателей. В синхронном двигателе ротор использует катушку под напряжением постоянного тока для создания постоянного магнитного поля. После того, как ротор приближается к синхронной скорости двигателя, северный (южный) полюс магнита ротора блокируется с южным (северным) полюсом вращающегося поля статора, и ротор вращается с синхронной скоростью. Ротор синхронного двигателя обычно включает в себя обмотку с короткозамкнутым ротором, которая используется для запуска вращения двигателя до подачи питания на катушку постоянного тока.Беличья клетка не действует на синхронных скоростях по причине, описанной выше.
Однофазные асинхронные двигатели и синхронные двигатели, используемые в большинстве бытовых ситуаций, работают по принципам, аналогичным принципам, описанным для трехфазных двигателей. Однако для создания пусковых моментов необходимо внести различные модификации, поскольку одна фаза не будет генерировать только вращающееся магнитное поле. Следовательно, в асинхронных двигателях используются конструкции с разделенной фазой, конденсаторным пуском или с экранированными полюсами.Небольшие синхронные однофазные двигатели, используемые для таймеров, часов, магнитофонов и т. П., Основаны на конструкциях с реактивным сопротивлением или гистерезисом.
КНИГИ
Красильщик. Катушки силы тока: как они сделаны и как используются: с описанием электрического света, электрических звонков, электродвигателей, телефона, микрофона и фонографа . Бостон: Adamant Media Corporation, 2005.
Эмади, Али. Энергоэффективные электродвигатели . Нью-Йорк: CRC, 2004.
Hughes, Austin. Электродвигатели и приводы . Оксфорд, Великобритания: Newnes, 2005.
Иэн А. Макинтайр
Электродвигатель | Инжиниринг | Fandom
Электродвигатели различных типоразмеров.
Электродвигатель преобразует электрическую энергию в механическое движение.
Ссылки на устройства []
Обратная задача — преобразование механического движения в электрическую энергию — выполняется генератором или динамо-машиной. Во многих случаях два устройства различаются только своим применением и незначительными деталями конструкции, а в некоторых приложениях используется одно устройство для выполнения обеих ролей.Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Принцип действия []
Вращающееся магнитное поле как сумма магнитных векторов от 3-х фазных катушек.
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой провод действует механическая сила, когда он проводит электричество, находясь в магнитном поле.Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю.
Большинство магнитных двигателей являются вращающимися, но существуют и линейные типы. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно.Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Двигатели постоянного тока []
Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем [1] в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью.
Постоянный магнит был помещен в середину бассейна. Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода.Этот двигатель часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол. Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — Колесо Барлоу [2].
В другой ранней конструкции электродвигателя использовался поршень возвратно-поступательного действия внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм
[3] соединил вращающуюся динамо-машину со вторым аналогичным устройством, приводя его в действие как двигатель.
Классический двигатель постоянного тока имеет вращающуюся ножку в виде электромагнита.
Поворотный переключатель, называемый коммутатором, дважды за цикл меняет направление электрического тока, чтобы он протекал через якорь, так что полюса электромагнита толкаются и притягиваются к постоянным магнитам на внешней стороне двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря.В момент переключения полярности инерция поддерживает классический двигатель в нужном направлении. (См. Диаграммы ниже.)
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле. Левая сторона якоря отодвигается от левого магнита и тянется вправо, вызывая вращение.
Якорь продолжает вращаться.
Когда якорь выравнивается по горизонтали, коммутатор меняет направление тока через катушку, изменяя направление магнитного поля.Затем процесс повторяется.
Электродвигатель постоянного тока с возбужденным полем []
Постоянные магниты на внешней стороне (статоре) двигателя постоянного тока могут быть заменены электромагнитами. Изменяя ток возбуждения, можно изменять соотношение скорость / крутящий момент двигателя. Обычно обмотка возбуждения размещается последовательно (последовательно намотанная) с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (параллельная обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом или для частичной обмотки. параллельно и частично последовательно (составная намотка) для баланса, обеспечивающего стабильную скорость в диапазоне нагрузок.Дальнейшее уменьшение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Регулировка скорости []
Вообще говоря, скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью регулируемых выводов аккумуляторной батареи, переменного напряжения питания, резисторов или электронного управления. Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе, это обычно делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять, вставляя последовательный резистор или с помощью переключающего устройства с электронным управлением, состоящего из тиристоров, транзисторов или, исторически, ртутных дуговых выпрямителей. В цепи, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания. Поскольку соотношение «включено» и «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Быстрое переключение требует меньше энергии, чем последовательные резисторы.Выходные фильтры сглаживают среднее напряжение, подаваемое на двигатель, и снижают шум двигателя.
Поскольку двигатель постоянного тока с последовательной обмоткой развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи.
Универсальные двигатели []
Вариантом электродвигателя постоянного тока является универсальный электродвигатель . Название происходит от того факта, что он может использовать переменный или постоянный ток питания, хотя на практике они почти всегда используются с источниками переменного тока.Принцип состоит в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда одинакова. На практике двигатель должен быть специально спроектирован для работы с переменным током (необходимо учитывать импеданс), и получаемый в результате двигатель обычно менее эффективен, чем эквивалентный чистый двигатель постоянного тока . Максимальная мощность универсальных двигателей ограничена, и двигатели мощностью более одного киловатта редко работают на промышленной частоте.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют типичные характеристики двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами. Непрерывное управление скоростью универсального двигателя, работающего на переменном токе, очень легко достигается с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может осуществляться с помощью нескольких отводов на катушке возбуждения.Бытовые блендеры, рекламирующие множество скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который может быть вставлен последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с половиной среднеквадратичного напряжения линии питания переменного тока).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превысить один оборот за цикл сетевого тока. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, Dremel и другие подобные миниатюрные шлифовальные машины часто превышают 30 000 об / мин.Универсальный двигатель, которому разрешено работать без механической нагрузки, будет превышать скорость, что может привести к его повреждению.
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, в которых раньше использовался универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для регулирования скорости.
Преимущества универсального двигателя и распределения переменного тока сделали установку низкочастотной системы распределения тягового тока экономичной для некоторых железнодорожных установок.
Двигатели переменного тока []
Типичный двигатель переменного тока состоит из двух частей:
- Внешний неподвижный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
В зависимости от типа используемого ротора существует два основных типа двигателей переменного тока:
- Синхронный двигатель, который вращается точно с частотой питающей сети или долей частоты питающей сети, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Принцип вращающегося магнитного поля, который обычно приписывают Николе Тесле в 1882 году или около того, применялся такими учеными, как Майкл Фарадей и Джеймс Клерк Максвелл, в 1820-х годах. Тесла, однако, использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. Майкл фон Доливо-Добровльски изобрел первый современный трехфазный «ротор с клеткой» в 1890 году. Введение двигателя с 1888 года и далее положило начало тому, что известно. как Вторая промышленная революция, сделавшая возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретения Теслы (1888 г.) [4].Первая успешная коммерческая трехфазная система генерации и передачи на большие расстояния была спроектирована Альмерианом Декером в Милл-Крик № 1 [5] в Редлендс, Калифорния. [6]
Трехфазные асинхронные двигатели переменного тока []
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (750 Вт) и 25 Вт с небольшими двигателями от проигрывателя компакт-дисков, игрушек и привода считывателя компакт-дисков и DVD-дисков. используется фазный (или многофазный) асинхронный двигатель переменного тока.Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Благодаря электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках в роторе, который, в свою очередь, создает уравновешивающее магнитное поле, которое заставляет ротор вращаться в направлении вращения поля. Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающее поле.
Асинхронные двигатели являются «рабочими лошадками» промышленности, и двигатели мощностью до 500 кВт производятся в строго стандартизированных типоразмерах, что делает их практически полностью взаимозаменяемыми между производителями (хотя европейские и североамериканские стандартные размеры отличаются). Очень большие синхронные двигатели производятся мощностью до десятков тысяч киловатт для трубопроводных компрессоров и приводов в аэродинамической трубе.
В асинхронных двигателях используются два типа роторов.
Роторы с короткозамкнутым ротором: В большинстве двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока.Беличья клетка получила свое название от своей формы — кольца на обоих концах якоря с стержнями, соединяющими кольца по длине ротора. Обычно это литой алюминий, залитый между железными пластинами ротора, и обычно видны только концевые кольца. Подавляющее большинство токов ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Очень низкие напряжения при очень высоких токах типичны для шин и колец; В двигателях с высоким КПД часто используется литая медь для уменьшения сопротивления ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора. Двигатель с короткозамкнутым ротором без нагрузки при синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка по своей природе связана с механической нагрузкой.Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, двигатель воздуходувки с короткозамкнутым ротором может приводить к затемнению света в доме при запуске, но не приглушает свет, когда его вентиляторный ремень (и, следовательно, механическая нагрузка) снимается. Кроме того, заклинивший двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска; результатом будет перегрев и выход из строя.
Распространенным типом двигателей с короткозамкнутым ротором является двигатель с экранированными полюсами, который используется в большинстве недорогих систем с низким уровнем шума и крутящего момента, таких как вентиляторы. Двигатели с экранированными полюсами по своей природе неэффективны, и в большинстве из них предусмотрена защита по сопротивлению для ограничения тока при остановке. За исключением двигателей с экранированными полюсами, большинство двигателей с короткозамкнутым ротором чрезвычайно эффективны.
Практически каждая стиральная машина, посудомоечная машина, отдельный вентилятор, проигрыватель и т. Д. Использует какой-либо вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется регулировка скорости. В этом случае ротор имеет такое же количество полюсов, что и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки подключают контактные кольца к внешнему контроллеру, например, к переменному резистору, который позволяет изменять скорость скольжения двигателя. В некоторых мощных приводах с регулируемой скоростью вращения ротора энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором, двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных силовых электронных устройств. Транзисторные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся все реже. (Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный сетевой ток.)
Используются несколько способов запуска многофазного двигателя. Там, где допустимы большой пусковой ток и высокий пусковой момент, двигатель можно запустить через линию, подав полное линейное напряжение на клеммы. Если необходимо ограничить пусковой пусковой ток (если мощность двигателя больше, чем у источника питания при коротком замыкании), используется пуск с пониженным напряжением с использованием последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска со звезды на треугольник, когда катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает скорости.Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых приложениях, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость двигателя переменного тока определяется в первую очередь частотой источника переменного тока и количеством полюсов в обмотке статора в соответствии с соотношением:
где
- Н с = Синхронная скорость, в оборотах в минуту
- F = частота переменного тока
- p = Число полюсов на фазную обмотку
Фактическая частота вращения асинхронного двигателя будет меньше этой расчетной синхронной скорости на величину, известную как скольжение , которая увеличивается с создаваемым крутящим моментом.Без нагрузки скорость будет очень близка к синхронной. При нагрузке стандартные двигатели имеют скольжение 2-3%, специальные двигатели могут иметь скольжение до 7%, а класс двигателей, известный как моментные двигатели , рассчитан на работу при 100% скольжении (0 об / мин / полный останов).
Скольжение двигателя переменного тока рассчитывается по:
где
- N r = Скорость вращения в оборотах в минуту.
- S = Нормализованное скольжение, от 0 до 1.
В качестве примера типичный четырехполюсный двигатель, работающий на частоте 60 Гц, может иметь номинальное значение на паспортной табличке 1725 об / мин при полной нагрузке, в то время как его расчетная скорость равна 1800.
Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Трехфазные синхронные двигатели переменного тока []
Если соединения с обмотками ротора трехфазного двигателя сняты на контактных кольцах и подают отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнита), результат называется синхронным. двигатель, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также может использоваться в качестве генератора переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие транзисторными частотно-регулируемыми приводами. Это значительно облегчает запуск массивного ротора большого синхронного двигателя. Они также могут запускаться как асинхронные двигатели с использованием обмотки с короткозамкнутым ротором, которая имеет общий ротор: как только двигатель достигает синхронной скорости, в обмотке с короткозамкнутым ротором не индуцируется ток, поэтому он мало влияет на синхронную работу двигателя. помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей; TGV может быть самым известным примером такого использования.
Однофазные асинхронные двигатели переменного тока []
Обычным однофазным электродвигателем является электродвигатель с расщепленными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие небольшие бытовые приборы. В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса окружена медной катушкой или лентой; индуцированный ток в перемычке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается через поверхность полюса в каждом цикле.
Другой распространенный однофазный двигатель переменного тока — это асинхронный двигатель с расщепленной фазой, обычно используемый в основных бытовых приборах, таких как стиральные машины и сушилки для одежды. По сравнению с двигателями с экранированными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой крутящий момент за счет использования специальной пусковой обмотки в сочетании с центробежным переключателем.
В двигателе с расщепленной фазой пусковая обмотка спроектирована с более высоким сопротивлением, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке.Когда двигатель запускается, пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель. Пусковая обмотка намотана с меньшим количеством витков провода меньшего диаметра, чем основная обмотка, поэтому она имеет меньшую индуктивность (L) и более высокое сопротивление (R). Более низкое отношение L / R создает небольшой фазовый сдвиг, не более примерно 30 градусов, между потоком, обусловленным основной обмоткой, и потоком пусковой обмотки. Начальное направление вращения можно изменить на обратное, просто поменяв местами соединения пусковой обмотки относительно рабочей обмотки.
Фаза магнитного поля в этой пусковой обмотке сдвинута по сравнению с фазой сетевого питания, что позволяет создать движущееся магнитное поле, которое запускает двигатель. Когда двигатель достигает скорости, близкой к расчетной, срабатывает центробежный выключатель, размыкая контакты и отсоединяя пусковую обмотку от источника питания. В этом случае двигатель работает только на ходовой обмотке. Пусковую обмотку необходимо отключить, так как это приведет к увеличению потерь в двигателе.
В конденсаторном пусковом двигателе пусковой конденсатор вставлен последовательно с пусковой обмоткой, создавая LC-цепь, способную к гораздо большему фазовому сдвигу (и, следовательно, гораздо большему пусковому крутящему моменту). Конденсатор, естественно, увеличивает стоимость таких двигателей.
Другой вариант — двигатель с постоянным разделенным конденсатором (PSC). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но здесь нет переключателя центробежного пуска, а вторая обмотка постоянно подключена к источнику питания.Двигатели PSC часто используются в кондиционерах, вентиляторах и воздуходувках, а также в других случаях, когда требуется регулируемая скорость. Изменяя ответвления на ходовой обмотке, но сохраняя постоянную нагрузку, можно заставить двигатель работать с разными скоростями.
Однофазные синхронные двигатели переменного тока []
Небольшие однофазные двигатели переменного тока также могут быть спроектированы с намагниченными роторами (или несколькими вариантами этой идеи). Роторы в этих двигателях не нуждаются в наведенном токе, поэтому они не скользят назад против частоты сети.Вместо этого они вращаются синхронно с частотой сети. Из-за высокой точности скорости такие двигатели обычно используются для питания механических часов, проигрывателей виниловых пластинок и ленточных накопителей; раньше они также широко использовались в приборах точного времени, таких как ленточные самописцы или механизмы привода телескопа. Синхронный двигатель с расщепленными полюсами — это одна из версий.
Поскольку инерция затрудняет мгновенный разгон ротора с остановленной до синхронной скорости, этим двигателям обычно требуется какая-то особая функция для запуска.В различных конструкциях используется небольшой асинхронный двигатель (который может использовать те же катушки возбуждения и ротор, что и синхронный двигатель) или очень легкий ротор с односторонним механизмом (чтобы гарантировать, что ротор запускается в «прямом» направлении).
Шаговые двигатели []
- Основная статья: Шаговый двигатель
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов. которые переключаются электронным способом.Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, в его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое по мере того, как обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому» перемещению в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться «между» точками «зубчатых колес» и, таким образом, вращаться чрезвычайно плавно.Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Бесщеточные двигатели постоянного тока []
- Основная статья: Бесщеточный электродвигатель постоянного тока
Многие ограничения классического коллекторного электродвигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт.Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры. Это ограничивает максимальную скорость машины. Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей.
Эти проблемы устранены в бесщеточном двигателе.В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением двигателя. Бесщеточные двигатели обычно имеют КПД 85-90%, тогда как двигатели постоянного тока с щеточной передачей обычно на 10% менее эффективны.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями лежит область бесщеточных двигателей постоянного тока. Построенные аналогично шаговым двигателям, они часто используют внешний ротор с постоянным магнитом , три фазы управляющих катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующую приводную электронику.Катушки активируются, одна фаза за другой, электроникой привода в соответствии с сигналами датчиков Холла. По сути, они действуют как трехфазные синхронные двигатели, содержащие собственную электронику частотно-регулируемого привода.
Бесщеточные двигатели постоянного тока обычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в видеомагнитофонах, шпинделях в приводах компакт-дисков, CD-ROM (и т. Д.), А также в механизмах офисных товаров, таких как вентиляторы, лазерные принтеры и копировальные аппараты. .У них есть несколько преимуществ перед обычными моторами:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока. Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; без коммутатора или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же устройства на эффекте Холла, которые обеспечивают коммутацию, также могут обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением). В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт.Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника []
Двигатель постоянного тока без сердечника — это специализированная форма щеточного двигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блинчика (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора.Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода приводов магнитных лент и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
Линейные двигатели []
Линейный двигатель — это, по сути, электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине, создавая бегущее электромагнитное поле.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели.Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летит» над землей.
См. Также []
Компоненты:
- Центробежный переключатель
- Коммутатор (электрический)
- Контактное кольцо
Ученые и инженеры:
- Отто Блати
- Томас Эдисон
- Фрэнк Дж. Спраг
- Никола Тесла
- Джордж Вестингауз
Приложения:
- Настольная пила
- Электромобиль
- Коррекция коэффициента мощности
Другое:
Внешние ссылки []
Учебники []
- Шейнфилд Д.J., Industrial Electronics for Engineers, Chemists and Technician, William Andrew Publishing, Norwich, NY, 2001. Самоучитель, в котором кратко рассматриваются электродвигатели, трансформаторы, регуляторы скорости, коды проводки и заземление, транзисторы, цифровые, и т. д. Легко читать и понимать, вплоть до элементарного уровня по каждому предмету, не подходящий справочник для технологов, уже работающих в любой из этих областей.
- Fitzgerald / Kingsley / Kusko (Fitzgerald / Kingsley / Umans в более поздние годы), * Electric Machinery , классический текст для младших и старших студентов-электриков.Первоначально опубликовано в 1952 году, 6-е издание вышло в 2002 году. Авторы по-прежнему указаны как Фицджеральд / Кингсли / Уманс, хотя Фицджеральд и Кингсли уже скончались.
- Б. Р. Пелли, «Тиристорные преобразователи с фазовым управлением и циклоконвертеры: работа, управление и производительность» (Нью-Йорк: Джон Вили, 1971).
Список литературы []
- Дональд Г. Финк и Х. Уэйн Бити, Стандартное руководство для инженеров-электриков , одиннадцатое издание , МакГроу-Хилл, Нью-Йорк, 1978, ISBN 007020974X.
- Эдвин Дж. Хьюстон и Артур Кеннелли, Последние типы динамо-электрических машин , авторское право American Technical Book Company 1897, опубликовано P.F. Collier and Sons New York, 1902
Как работают электромобили?
Полностью электрические транспортные средства (электромобили), также называемые аккумуляторными электромобилями, имеют электродвигатель вместо двигателя внутреннего сгорания. В транспортном средстве используется большая тяговая аккумуляторная батарея для питания электродвигателя, и его необходимо подключать к сетевой розетке или зарядному оборудованию, также называемому оборудованием для электропитания (EVSE).Поскольку он работает на электричестве, автомобиль не выпускает выхлопных газов из выхлопной трубы и не содержит типичных компонентов жидкого топлива, таких как топливный насос, топливопровод или топливный бак. Узнайте больше об электромобилях.
Изображение в высоком разрешенииКлючевые компоненты полностью электрического автомобиля
Батарея (полностью электрическая вспомогательная): В транспортном средстве с электрическим приводом вспомогательная батарея обеспечивает электроэнергией аксессуары транспортного средства.
Порт зарядки: Порт зарядки позволяет автомобилю подключаться к внешнему источнику питания для зарядки тягового аккумулятора.
Преобразователь постоянного тока в постоянный: Это устройство преобразует мощность постоянного тока высокого напряжения от тягового аккумуляторного блока в мощность постоянного тока низкого напряжения, необходимую для работы аксессуаров автомобиля и зарядки вспомогательной аккумуляторной батареи.
Тяговый электродвигатель: Используя мощность от тягового аккумулятора, этот электродвигатель приводит в движение колеса автомобиля.В некоторых автомобилях используются мотор-генераторы, которые выполняют как приводную, так и регенеративную функции.
Бортовое зарядное устройство: Принимает входящую электроэнергию переменного тока, подаваемую через порт зарядки, и преобразует ее в мощность постоянного тока для зарядки тягового аккумулятора. Он также обменивается данными с зарядным оборудованием и отслеживает характеристики аккумулятора, такие как напряжение, ток, температуру и состояние заряда, во время зарядки аккумулятора.
Контроллер силовой электроники: Этот блок управляет потоком электроэнергии, передаваемой тяговой батареей, регулируя скорость электрического тягового двигателя и создаваемый им крутящий момент.
Тепловая система (охлаждение): Эта система поддерживает надлежащий диапазон рабочих температур двигателя, электродвигателя, силовой электроники и других компонентов.
Блок тяговой аккумуляторной батареи: Накапливает электроэнергию для использования тяговым электродвигателем.
Трансмиссия (электрическая): Трансмиссия передает механическую энергию от тягового электродвигателя для привода колес.
20.2 Двигатели, генераторы и трансформаторы — физика
Электродвигатели, генераторы и трансформаторы
Как мы узнали ранее, на провод с током в магнитном поле действует сила — вспомните, F = IℓBsinθF = IℓBsinθ. Электродвигатели, которые преобразуют электрическую энергию в механическую, являются наиболее распространенным приложением магнитной силы к токоведущим проводам. Двигатели состоят из витков провода в магнитном поле. Когда ток проходит через петли, магнитное поле оказывает на петли крутящий момент, который вращает вал.При этом электрическая энергия преобразуется в механическую работу. На рисунке 20.23 показан схематический чертеж электродвигателя.
Рисунок 20.23 Крутящий момент в токовой петле. Вертикальная петля из проволоки в горизонтальном магнитном поле прикреплена к вертикальному валу. Когда ток проходит через проволочную петлю, на нее действует крутящий момент, заставляющий вращать вал.
Давайте исследуем силу на каждом сегменте контура на рисунке 20.23, чтобы найти крутящие моменты, возникающие вокруг оси вертикального вала — это приведет к полезному уравнению для крутящего момента на контуре.Считаем, что магнитное поле однородно по прямоугольной петле, которая имеет ширину w и высоту, ℓ, как показано на рисунке. Сначала рассмотрим силу, действующую на верхний сегмент петли. Чтобы определить направление силы, мы используем правило правой руки. Ток идет на страницу слева направо, а магнитное поле идет слева направо в плоскости страницы. Согните пальцы правой руки от вектора тока к вектору магнитного поля, а большой палец правой руки будет направлен вниз.Таким образом, сила на верхнем сегменте направлена вниз, что не создает крутящего момента на валу. Повторение этого анализа для нижнего сегмента — пренебрегая небольшим зазором, где выходят подводящие провода — показывает, что сила на нижнем сегменте направлена вверх, снова не создавая крутящего момента на валу.
Теперь рассмотрим левый вертикальный сегмент петли. Снова используя правило правой руки, мы обнаруживаем, что сила, действующая на этот сегмент, перпендикулярна магнитному полю, как показано на рисунке 20.23. Эта сила создает крутящий момент на валу.Повторение этого анализа на правом вертикальном сегменте петли показывает, что сила на этом сегменте направлена в направлении, противоположном направлению силы на левом сегменте, тем самым создавая равный крутящий момент на валу. Таким образом, общий крутящий момент на валу вдвое превышает крутящий момент на одном из вертикальных сегментов петли.
Чтобы определить величину крутящего момента при вращении проволочной петли, рассмотрите рисунок 20.24, на котором показан вид проволочной петли сверху. Напомним, что крутящий момент определяется как τ = rFsinθ, τ = rFsinθ, где F — приложенная сила, r — расстояние от оси до места приложения силы, а θ — угол между r и F .Обратите внимание, что при вращении петли ток в вертикальных сегментах петли всегда перпендикулярен магнитному полю. Таким образом, уравнение F = IℓBsinθF = IℓBsinθ дает величину силы на каждом вертикальном сегменте как F = IℓB.F = IℓB. Расстояние х от вала до места приложения этой силы составляет х /2, поэтому крутящий момент, создаваемый этой силой, равен
τsegment = rFsinθ = w / 2IℓBsinθ = (w / 2) IℓBsinθ.τsegment = rFsinθ = w / 2IℓBsinθ = (w / 2) IℓBsinθ.20,10
Поскольку есть два вертикальных сегмента, общий крутящий момент вдвое больше, или
τ = wIℓBsinθ.τ = wIℓBsinθ.20,11
Если у нас есть многократный контур с Н витков, мы получаем Н, в раз превышающие крутящий момент одиночного контура. Используя тот факт, что площадь петли равна A = wℓ; A = wℓ; выражение для крутящего момента становится
τ = NIABsinθ. τ = NIABsinθ.20,12
Это крутящий момент на токоведущей петле в однородном магнитном поле. Можно показать, что это уравнение справедливо для петли любой формы.
Рисунок 20.24 Вид сверху на проволочную петлю с рисунка 20.23. Магнитное поле создает силу F на каждом вертикальном сегменте проволочной петли, которая создает крутящий момент на валу. Обратите внимание, что токи Iin, IoutIin и Iout имеют одинаковую величину, потому что они оба представляют ток, протекающий в проводной петле, но IinIin течет на страницу, а IoutIout вытекает из страницы.Из уравнения τ = NIABsinθ, τ = NIABsinθ, мы видим, что крутящий момент равен нулю, когда θ = 0.θ = 0. По мере вращения проволочной петли крутящий момент увеличивается до максимального положительного крутящего момента wℓBwℓB при θ = 90 °.θ = 90 °. Затем крутящий момент уменьшается до нуля, когда проволочная петля поворачивается на θ = 180 ° .θ = 180 °. От θ = 180 ° θ = 180 ° до θ = 360 °, θ = 360 ° крутящий момент отрицательный. Таким образом, крутящий момент меняет знак каждые пол-оборота, поэтому проволочная петля будет колебаться вперед и назад.
Чтобы катушка продолжала вращаться в том же направлении, ток меняется на противоположный, когда катушка проходит через θ = 0 и θ = 180 ° θ = 0 и θ = 180 ° с использованием автоматических переключателей, называемых щетками , как показано на рисунке 20.25.
Рисунок 20.25 (a) Поскольку угловой момент катушки переносит ее через θ = 0, θ = 0, щетки меняют направление тока, и крутящий момент остается по часовой стрелке. (b) Катушка непрерывно вращается по часовой стрелке, при этом ток меняет направление на каждую половину оборота, чтобы поддерживать вращающий момент по часовой стрелке.А теперь подумайте, что произойдет, если запустить двигатель в обратном направлении; то есть мы прикрепляем ручку к валу и механически заставляем катушку вращаться в магнитном поле, как показано на рисунке 20.26. Согласно уравнению F = qvBsinθF = qvBsinθ, где θθ — угол между векторами v → v → и B → -chargesB → — заряды в проводах петли испытывают магнитную силу, потому что они движутся в магнитном поле.Снова используя правило правой руки, когда мы сгибаем пальцы от вектора v → v → к вектору B → B →, мы обнаруживаем, что заряды в верхнем и нижнем сегментах ощущают силу, перпендикулярную проводу, которая не вызывает тока. . Однако заряды в вертикальных проводах испытывают силы, параллельные проводу, заставляя ток течь через провод и через внешнюю цепь, если она подключена. Такое устройство, которое преобразует механическую энергию в электрическую, называется генератором.
Рисунок 20.26 Когда эта катушка вращается на одну четверть оборота, магнитный поток Φ изменяется от максимального до нуля, вызывая ЭДС, которая пропускает ток через внешнюю цепь.
Поскольку ток индуцируется только в боковых проводах, мы можем определить наведенную ЭДС, рассматривая только эти провода. Как объясняется в разделе «Наведенный ток в проводе», ЭДС движения в прямом проводе, движущемся со скоростью v через магнитное поле B , равна E = Bℓv, E = Bℓv, где скорость перпендикулярна магнитному полю.В генераторе скорость составляет угол θθ с B (см. Рисунок 20.27), поэтому составляющая скорости, перпендикулярная B , равна vsinθ.vsinθ. Таким образом, в этом случае ЭДС, индуцированная на каждом вертикальном отрезке провода, равна E = Bℓvsinθ, E = Bℓvsinθ, и они направлены в одном направлении. Полная ЭДС вокруг контура тогда составляет
E = 2Bℓvsinθ.E = 2Bℓvsinθ.20,13
Хотя это выражение действительно, оно не дает ЭДС как функцию времени. Чтобы узнать, как ЭДС изменяется во времени, предположим, что катушка вращается с постоянной угловой скоростью ω.ω. Угол θθ связан с угловой скоростью соотношением θ = ωt, θ = ωt, так что
E = 2Bℓvsinωt.E = 2Bℓvsinωt.20,14
Напомним, что тангенциальная скорость v связана с угловой скоростью ωω соотношением v = rω.v = rω. Здесь r = w / 2r = w / 2, так что v = (w / 2) ωv = (w / 2) ω и
E = 2Bℓ (w2ω) sinωt = Bℓwωsinωt. E = 2Bℓ (w2ω) sinωt = Bℓwωsinωt.20,15
Заметив, что площадь петли A = ℓwA = ℓw и учитывая N витков, мы находим, что
E = NABωsinωtE = NABωsinωt20.16
— ЭДС, индуцированная в катушке генератора из N, витков и области A, , вращающейся с постоянной угловой скоростью ωω в однородном магнитном поле B . Это также можно выразить как
E = E0sinωtE = E0sinωt20,17
где
— максимальная (пиковая) ЭДС.
Рис. 20.27. Мгновенная скорость вертикальных отрезков провода составляет угол θθ с магнитным полем. Скорость показана на рисунке зеленой стрелкой, и указан угол θθ.На рис. 20.28 показан генератор, подключенный к лампочке, и график зависимости ЭДС от времени. Обратите внимание, что ЭДС колеблется от положительного максимума E0E0 до отрицательного максимума −E0. − E0. Между тем, ЭДС проходит через ноль, что означает, что в это время через лампочку протекает нулевой ток. Таким образом, лампочка на самом деле мигает с частотой 2 f , потому что за период происходит два перехода через ноль. Поскольку такой переменный ток используется в домах по всему миру, почему мы не замечаем мерцания света? В Соединенных Штатах частота переменного тока составляет 60 Гц, поэтому свет мигает с частотой 120 Гц.Это быстрее, чем частота обновления человеческого глаза, поэтому вы не заметите мерцания огней. Кроме того, другие факторы препятствуют такому быстрому включению и выключению различных типов лампочек, поэтому светоотдача немного сглаживается .
Рис. 20.28 ЭДС генератора направляется на лампочку с показанной системой колец и щеток. График показывает зависимость ЭДС генератора от времени. E0E0 — пиковая ЭДС. Период равен T = 1 / f = 2π / ω, T = 1 / f = 2π / ω, где f — частота, с которой катушка вращается в магнитном поле.Виртуальная физика
Генератор
Используйте это моделирование, чтобы узнать, как работает электрический генератор. Управляйте подачей воды, которая заставляет водяное колесо вращать магнит. Это вызывает ЭДС в ближайшей катушке провода, которая используется для зажигания лампочки. Вы также можете заменить лампочку вольтметром, который позволяет увидеть полярность напряжения, которая меняется с положительной на отрицательную.
Захват
Установите количество проволочных петель равным трем, силу стержневого магнита примерно на 50 процентов и площадь петли на 100 процентов.Обратите внимание на максимальное напряжение на вольтметре. Предполагая, что одно основное деление на вольтметре составляет 5 В, какое максимальное напряжение при использовании только однопроводной петли вместо трехпроводной петли?
- 5 В
- 15 В
- 125 В
- 53 В
В реальной жизни электрические генераторы выглядят совсем иначе, чем на рисунках в этом разделе, но принципы те же. Источником механической энергии, вращающей катушку, может быть падающая вода — гидроэнергия — пар, образующийся при сжигании ископаемого топлива, или кинетическая энергия ветра.Рисунок 20.29 показывает паровую турбину в разрезе; пар движется по лопастям, соединенным с валом, который вращает катушку внутри генератора.
Рисунок 20.29 Паротурбинный генератор. Пар, образующийся при сжигании угля, ударяет по лопаткам турбины, вращая вал, соединенный с генератором. (Источник: Nabonaco, Wikimedia Commons)
Еще одно очень полезное и распространенное устройство, использующее магнитную индукцию, называется трансформатором. Трансформаторы делают то, что подразумевает их название — они преобразуют напряжение из одного значения в другое; термин напряжение используется, а не ЭДС, потому что трансформаторы имеют внутреннее сопротивление.Например, многие сотовые телефоны, ноутбуки, видеоигры, электроинструменты и небольшая бытовая техника имеют встроенный в подключаемый модуль трансформатор, который преобразует 120 В или 240 В переменного тока в любое напряжение, используемое устройством. На рисунке 20.30 показаны два разных трансформатора. Обратите внимание на катушки проводов, которые видны на каждом устройстве. Назначение этих катушек поясняется ниже.
Рисунок 20.30 Слева — обычный трансформатор с многослойным сердечником, который широко используется в передаче электроэнергии и в электрических приборах.Справа — тороидальный трансформатор, который меньше трансформатора с многослойным сердечником при той же мощности, но более дорогой в изготовлении из-за оборудования, необходимого для наматывания проводов в форме пончика.
На рисунке 20.31 показан трансформатор с многослойной обмоткой, который основан на законе индукции Фарадея и очень похож по конструкции на устройство Фарадея, которое использовалось для демонстрации того, что магнитные поля могут генерировать электрические токи. Две катушки с проволокой называются первичной и вторичной катушками.При нормальном использовании входное напряжение подается на первичную катушку, а вторичная обмотка создает преобразованное выходное напряжение. Железный сердечник не только улавливает магнитное поле, создаваемое первичной катушкой, но также его намагниченность увеличивает напряженность поля, что аналогично тому, как диэлектрик увеличивает напряженность электрического поля в конденсаторе. Поскольку входное напряжение переменного тока, изменяющийся во времени магнитный поток проходит через вторичную катушку, вызывая выходное напряжение переменного тока.
Рисунок 20.31 Типичная конструкция простого трансформатора имеет две катушки, намотанные на ферромагнитный сердечник. Магнитное поле, создаваемое первичной катушкой, в основном ограничивается и увеличивается сердечником, который передает его на вторичную катушку. Любое изменение тока в первичной катушке вызывает ток во вторичной катушке.
Ссылки на физику
Магнитная канатная память
Чтобы отправить людей на Луну, программе Apollo пришлось спроектировать бортовую компьютерную систему, которая была бы надежной, потребляла мало энергии и была достаточно маленькой, чтобы поместиться на борту космического корабля.В 1960-х годах, когда была запущена программа Apollo, целые здания регулярно выделялись для размещения компьютеров, вычислительная мощность которых была бы легко превзойдена самыми простыми современными портативными калькуляторами.
Для решения этой проблемы инженеры Массачусетского технологического института и крупного оборонного подрядчика обратились к запоминающему устройству с магнитным тросом , которое являлось ответвлением аналогичной технологии, использовавшейся до того времени для создания запоминающего устройства с произвольным доступом. В отличие от памяти с произвольным доступом, память с магнитным тросом была постоянным запоминающим устройством, которое содержало не только данные, но и инструкции.Таким образом, на самом деле это было больше, чем память: это была компьютерная программа, зашитая зашитой.
Компонентами магнитной веревочной памяти были проволока и железные кольца, которые назывались сердечниками . Железные сердечники служили трансформаторами, как показано на предыдущем рисунке. Однако вместо того, чтобы наматывать провода несколько раз вокруг сердечника, отдельные провода проходили через сердечники только один раз, создавая эти одновитковые трансформаторы. До 63 проводов word могут проходить через одну жилу вместе с одним проводом бит .Если словарный провод проходит через данный сердечник, импульс напряжения на этом проводе вызывает в разрядном проводе ЭДС, которая интерпретируется как , . Если бы провод слова не проходил через сердечник, на разрядном проводе не наведалась бы ЭДС, что было бы интерпретировано как ноль .
Инженеры будут создавать программы, которые будут жестко встраиваться в эти запоминающие устройства магнитного троса. Процесс подключения мог занять до месяца, так как рабочие кропотливо протягивали провода через одни жилы и вокруг других.Если были допущены какие-либо ошибки в программировании или подключении, отладка была бы чрезвычайно трудной, если не невозможной.
Эти модули неплохо справились со своей задачей. Им приписывают исправление ошибки астронавта в процедуре посадки на Луну, что позволило «Аполлону-11» приземлиться на Луну. Сомнительно, чтобы Майкл Фарадей когда-либо мог представить себе такое применение магнитной индукции, когда открыл ее.
Захват
Если бы разрядный провод был дважды обмотан вокруг каждой жилы, как это повлияло бы на напряжение, индуцированное в разрядном проводе?
- Если количество витков вокруг провода удвоено, ЭДС уменьшается вдвое.
- Если количество витков вокруг провода удвоится, ЭДС не изменится.
- Если количество витков вокруг провода удвоено, ЭДС также удваивается.
- Если количество витков вокруг провода удвоено, ЭДС в четыре раза превышает начальное значение.
Для трансформатора, показанного на рисунке 20.31, выходное напряжение VSVS от вторичной обмотки почти полностью зависит от входного напряжения VPVP на первичной обмотке и количества петель в первичной и вторичной обмотках.Закон индукции Фарадея для вторичной обмотки дает наведенное выходное напряжение VSVS равным
. VS = −NSΔΦΔt, VS = −NSΔΦΔt,20,19
где NSNS — количество витков во вторичной катушке, а ΔΦ / ΔtΔΦ / Δt — скорость изменения магнитного потока. Выходное напряжение равно индуцированной ЭДС (VS = ES), (VS = ES) при небольшом сопротивлении катушки — разумное предположение для трансформаторов. Площадь поперечного сечения катушек одинакова с каждой стороны, как и напряженность магнитного поля, поэтому ΔΦ / ΔtΔΦ / Δt одинаковы с каждой стороны.Входное первичное напряжение VPVP также связано с изменением магнитного потока на
VP = −NPΔΦΔt.VP = −NPΔΦΔt.20,20
Соотношение этих двух последних уравнений дает полезное соотношение
VSVP = NSNP (3,07) .VSVP = NSNP (3,07).20,21
Это известно как уравнение трансформатора. Он просто заявляет, что отношение вторичного напряжения к первичному напряжению в трансформаторе равно отношению количества контуров вторичной катушки к количеству контуров в первичной катушке.
Передача электроэнергии
Трансформаторышироко используются в электроэнергетике для повышения напряжения — так называемые повышающие трансформаторы — перед передачей на большие расстояния по высоковольтным проводам. Они также используются для понижения напряжения — так называемые понижающие трансформаторы — для подачи энергии в дома и на предприятия. Подавляющая часть электроэнергии вырабатывается с помощью магнитной индукции, когда катушка из проволоки или медный диск вращается в магнитном поле.Первичная энергия, необходимая для вращения катушек или диска, может быть получена различными способами. Гидроэлектростанции используют кинетическую энергию воды для привода электрогенераторов. Угольные или атомные электростанции создают пар для привода паровых турбин, вращающих змеевики. Другие источники первичной энергии включают ветер, приливы или волны на воде.
После выработки энергии ее необходимо передать потребителю, что часто означает передачу мощности на сотни километров. Для этого напряжение силовой установки повышается с помощью повышающего трансформатора, который повышается, и ток уменьшается пропорционально, потому что
Ptransmitted = ItransmittedVtransmitted⋅Ptransmitted = ItransmittedVtransmitted⋅20.22
Более низкий ток ItransmittedItransmitted в передающих проводах снижает потери Джоулей , которые представляют собой нагрев провода из-за протекания тока. Этот нагрев вызван небольшим, но ненулевым сопротивлением RwireRwire проводов передачи. Потери энергии в окружающую среду из-за этого тепла составляют
Plost = Itransmitted2Rwire, Plost = Itransmitted2Rwire,20,23
, который пропорционален текущему в квадрате в проводе передачи.Вот почему передаваемый ток ItransmittedItransmitted должен быть как можно меньше, и, следовательно, напряжение должно быть большим для передачи мощности Ptransmitted⋅Ptransmitted⋅
Для передачи мощности на большие расстояния используются напряжения от 120 до 700 кВ. Напряжение повышается на выходе из электростанции повышающим трансформатором, как показано на рисунке 20.32.
Рисунок 20.32 Трансформаторы изменяют напряжение в нескольких точках системы распределения электроэнергии.Электроэнергия обычно вырабатывается при напряжении более 10 кВ и передается на большие расстояния при напряжениях от 120 до 700 кВ для ограничения потерь энергии. Местное распределение электроэнергии по районам или промышленным предприятиям проходит через подстанцию и передается на короткие расстояния с напряжением от 5 до 13 кВ. Оно снижено до 120, 240 или 480 В для безопасности на месте отдельного пользователя.
После подачи электроэнергии в населенный пункт или промышленный центр напряжение на подстанции понижается до 5–30 кВ.Наконец, в частных домах или на предприятиях мощность снова понижается до 120, 240 или 480 В. Каждое повышающее и понижающее преобразование выполняется с помощью трансформатора, разработанного на основе закона индукции Фарадея. Мы прошли долгий путь с тех пор, как королева Елизавета спросила Фарадея, как можно использовать электричество.
.