Какие бывают двигатели? Типы электродвигателей. Асинхронные двигатели
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.
Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин.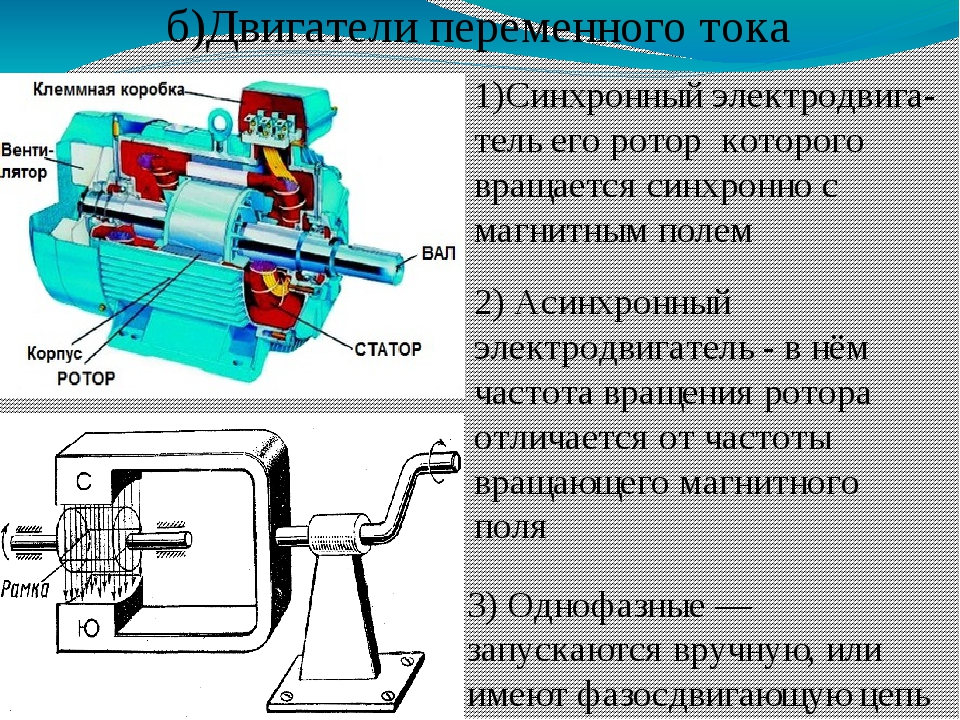 В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.

Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов.

Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.

Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
Типы крановых электродвигателей и их особенности
Типы крановых электродвигателейКрановые электродвигатели это агрегаты, которые приводят в движение механизм крана. В зависимости от условий, крановые двигатели подразделяются на двигатели с фазным и короткозамкнутым ротором. С фазным ротором двигатели МТН и МТКН с короткозамкнутым.
Эти агрегаты выполняют следующие функции:
- Перемещение крана по рельсам
- Перемещение тележки механизма перпендикулярно рельсам
- Непосредственно подъем груза
У них простая конструкция: щеточный механизм, держатель, встроенный механизм нажатия, который служит для запуска электродвигателя. Так же этот механизм снижает вероятность несчастного случая на производстве. Щеткодержатель гарантирует безопасность при эксплуатации двигателя, и дополнительно служит его тормозом. Более всего, распространены электродвигатели с фазным ротором. Это объясняется тем, что по условиям работы кранового механизма, в большинстве случаев присутствует сопротивление при запуске электродвигателя. Особенностью эксплуатации крановых двигателей является необходимость регулировать обороты в процессе работы механизма.
Так же этот механизм снижает вероятность несчастного случая на производстве. Щеткодержатель гарантирует безопасность при эксплуатации двигателя, и дополнительно служит его тормозом. Более всего, распространены электродвигатели с фазным ротором. Это объясняется тем, что по условиям работы кранового механизма, в большинстве случаев присутствует сопротивление при запуске электродвигателя. Особенностью эксплуатации крановых двигателей является необходимость регулировать обороты в процессе работы механизма.
Преимуществом двигателей с фазным ротором МТН (MTF) является высокий стартовый крутящий момент и низкий пусковой ток. Особенностью фазного ротора является его строение, в фазный ротор добавлены обмотки трех фаз, соединенных в звезду и концы этих обмоток выведены на контактные кольца. По кольцам скользят щетки, которые подсоединяют обмотки с питающей электрической цепи. Плавный разгон электродвигателя с фазным ротором обеспечивается специальным устройством, контакторы которого включаются последовательно через фиксированный временной промежуток, формируемый реле времени. Для перемещения моста крана часто используют два электродвигателя по обоим концам моста, при этом они работают синхронно и их характеристики и параметры идентичны.
Для перемещения моста крана часто используют два электродвигателя по обоим концам моста, при этом они работают синхронно и их характеристики и параметры идентичны.
Монтажные крепления этих агрегатов имеют отличия от стандартных креплений общепромышленных асинхронных электродвигателей. Они заключаются в исполнении вала агрегата, они бывают или цилиндрическими или коническими, при чем, у мощных двигателей идет конический вал. Так же широко распространены двигатели с двумя выходными валами, и такое исполнение является основным в отличие от основных монтажных креплений общепромышленных двигателей.
Режимы работы агрегатов МТН и МТКНКрановые двигатели в своем большинстве работают в повторно-кратковременном режиме работы с разными условиями включений. В основном это режим работы S3, процессы включения которого: ПВ 15, 25, 40 и 60%. Подробнее про режимы работы электродвигателей читайте в этой статье.
Тип двигателя |
Электродвигатели крановые — электрические параметры |
Масса, кг |
|||||
| Р, кВт |
Номинальная частота вращения, об/мин |
КПД, % |
Iн статора, А |
Момент инерции, кг*м2 |
Мmax/Mн | ||
| МТН011-6 | 1,4 | 890 | 65 | 8,8 | 0,021 | 2,6 | 60 |
| МТН012-6 | 2,2 | 895 | 70 | 11,0 | 0,026 | 2,7 | 68 |
| МТН111-6 | 3,5 | 915 | 75 | 18,2/10,5 | 0,06 | 2,3 | 105 |
| МТН112-6 | 5,0 | 915 | 77 | 23,4/13,5 | 0,08 | 2,3 | 125 |
| МТН211-6 | 7,5 | 940 | 79 | 32/18,5 | 0,15 | 2,5 | 160 |
| МТНЗ11-6 | 11 | 945 | 84 | 44,6/25,8 | 0,39 | 2,8 | 200 |
| МТН312-6 | 15 | 962 | 84 | 58,5/33,8 | 0,39 | 2,8 | 230 |
| МТН311-8 | 7,5 | 690 | 74 | 35/20,3 | 0,39 | 2,5 | 230 |
| МТН312-8 | 11 | 700 | 81 | 46,7/27 | 0,39 | 2,5 | 230 |
| МТН411-6 | 22 | 960 | 86 | 87/50,4 | 0,39 | 2,8 | 320 |
| МТН412-6 | 30 | 960 | 88 | 107,2/62 | 0,39 | 2,8 | 398 |
| МТН411-8 | 15 | 715 | 83 | 61/35 | 0,39 | 2,8 | 320 |
| МТН412-8 | 22 | 715 | 86 | 81/46,9 | 0,39 | 2,8 | 390 |
| МТКН011-6 | 1,4 | 920 | 70,5 | 4,5 | 0,016 | 2,8 | 46 |
| МТКН012-6 | 2,2 | 915 | 73,5 | 6,5 | 0,021 | 2,8 | 50 |
| МТКН111-6 | 3,5 | 920 | 79,0 | 9,0 | 0,056 | 2,5 | 80 |
| МТКН112-6 | 5,0 | 920 | 79,0 | 12,8 | 0,078 | 2,8 | 100 |
| МТКН211-6 | 7,5 | 880 | 78,5 | 18,1 | 0,076 | 33 | 120 |
| МТКh411-6 | 11 | 940 | 81 | 24,5 | 0,275 | 2,8 | 185 |
| МТКН312-6 | 15 | 940 | 83 | 32,5 | 0,308 | 2,8 | 190 |
| МТКh411-8 | 7,5 | 700 | 81 | 21,0 | 0,230 | 2,8 | 160 |
| МТКН312-8 | 11 | 700 | 81 | 26,0 | 0,352 | 2,8 | 205 |
| МТКН411-6 | 22 | 935 | 84 | 48,0 | 0,560 | 2,8 | 262 |
| МТКН412-6 | 30 | 935 | 85 | 61,0 | 0,750 | 3,0 | 322 |
| МТКН411-8 | 15 | 700 | 82 | 40,0 | 0,560 | 2,8 | 262 |
| МТКН412-8 | 22 | 700 | 83 | 54,0 | 0,750 | 2,8 | 322 |
виды, сферы применения и прочие особенности
20. 08.2019
08.2019
Существует несколько видов электрических двигателей:
1. Электродвигатель постоянного тока. Устройство представляет собой электромашину, предназначенную для получения механической энергии за счет преобразования энергии постоянного тока.
Электрические двигатели из-за высоких эксплуатационных показателей и долговечности устанавливаются на следующие виды оборудования:
- подъемно-транспортные агрегаты;
- красильно-отделочное оборудование;
- полимерное оборудование;
- буровые станки;
- различные вспомогательные агрегаты для экскаваторов.
Например, к оборудованию постоянного тока можно отнести электродвигатель серии 2п, который используется при работе широко регулируемого электропривода.
Для работы машины серии 2п необходимы следующие условия:
- работа может происходить на высоте не более 1 километра над уровнем моря;
- эксплуатация допускается при температуре воздуха от +5 до +40 градусов Цельсия;
- влажность воздуха при +25 градусов не должна превышать 80%;
- работа допускается в безопасных условиях: отсутствие взрывоопасных веществ, агрессивных газов, а также паров в концентрации, способной разрушить металл.

2. Синхронный электродвигатель относится к электрическим машинам переменного тока. Во время работы ротор и магнитное поле в воздушном зазоре вращаются в одинаковой частоте. Как правило, данные электродвигатели применяются в приводах, работа которых осуществляется с одинаковой скоростью. Например, в компрессорах, насосах, больших вентиляторах, а также генераторах постоянного тока.
3. Асинхронный электрический двигатель. Во время работы ротор вращается с разной частотой по отношению к магнитному полю, который создается обмоткой статора.
Существует несколько типов асинхронных машин:
- Асинхронные машины с короткозамкнутым ротором. Устанавливаются в электрические приводы, для работы которых нет необходимости создания больших пусковых моментов.
- Асинхронные машины с фазным ротором. Используются данные двигатели в приводах механизмов, при работе с которыми необходимо плавное регулирование скоростного режима. Двигатели с фазным ротором применяются и в механизмах, работающих при больших нагрузках.
 Двигатели с фазным ротором применяются и в механизмах, работающих при больших нагрузках.
Двигатели с фазным ротором применяются и в механизмах, работающих при больших нагрузках.Все они оснащены одинаковым статором, однако отличием машин является конструкция обмотки ротора.
К асинхронным электрическим двигателям можно отнести:
- Крановые электродвигатели.
Область применения электродвигателей – электрические приводы металлургического оборудования, а также различные подъемно-транспортные механизмы, работающие в кратковременных режимах. Стоит отметить, что крановые электродвигатели также используются в механизмах, работающих в длительном режиме.
Для работы крановых двигателей требуется напряжение сети 380 Вольт. Обмотка статора должна быть трехконечная. При этом в определенном изготовлении механизма (шесть концов, имеющих соединение фаз в виде треугольника или звезды) работа возможна при напряжении 220/380, а также 380/600 Вольт.
Устанавливаются в стационарный либо передвижной транспорт, работающий в опасной среде, где воздух смешан с парами взрывоопасных газов либо смесей. Допуск к работе взрывозащищенных электродвигателей определяется ГОСТ Р 513 30-5.
Допуск к работе взрывозащищенных электродвигателей определяется ГОСТ Р 513 30-5.
Сфера применения взрывозащищенных электродвигателей серии АИМ, а также АИММ – нефтехимическая, горнодобывающая промышленность, производство ЛКМ. Для работы взрывозащищенных электродвигателей необходима сеть с трехфазным переменным током частотой 50-60 Герц.
Например, электрические двигатели АИР. Данные машины применяются в приводах механизмов, работающих на открытом воздухе, под навесом, куда не попадают прямые солнечные лучи, а также в закрытом помещении, где работа осуществляется от электросети с частотой переменного тока 50 Герц.
Возникли вопросы?
Заполните форму обратной связи, наши менеджеры свяжутся с вами!
какие они бывают / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана
отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также
была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Электродвигатели
Электродвигатели
- Подробности
- Категория: Электротехника
Электрические двигатели
В бытовой технике в основном применяют электродвигатели переменного тока двух видов: коллекторные (электробритва, швейная машина, пылесос, универсальная кухонная машина, электродрель и др.) и асинхронные (стиральная машина, холодильник).
Коллекторный электродвигатель является универсальным. Он может работать от постоянного и переменного токов. Принцип действия двигателя основан на взаимодействии проводника (якоря) с электрическим током и магнитным полем, создаваемым электромагнитом (индуктором). Механическая сила, возникающая при таком взаимодействии, заставляет вращаться якорь (ротор). Направление движения проводника с током определяется по правилу левой руки. Электрический двигатель с вращающимся валом был впервые сконструирован в 1834 г. русским физиком Б.С. Якоби (1801-1874).
На рисунке ниже показано устройство коллекторного двигателя.
Станина и сердечник электромагнита двигателя переменного тока выполнена из листов электротехнической стали для уменьшения потерь энергии на нагревание сердечника. У двигателя постоянного тока эти детали в основном делают сплошными. Обмотка возбуждения электромагнита в двигателях переменного тока включается последовательно с обмоткой якоря. При таком соединении весь ток якоря проходит по обмотке возбуждения, обеспечивая большой пусковой момент двигателя.
Асинхронный двигатель не имеет коллектора и щеток, следовательно, в нем не возникает искра.
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках короткозамкнутого ротора. По закону Ленца в проводниках наводится ток такого направления, что своим магнитным полем препятствует причине, его создающей, т.е. тормозит вращающееся магнитное поле. Поскольку ротор укреплен в подшипниках, то он приходит в движение в направлении вращения поля. Скорость вращения ротора не совпадает со скоростью вращения магнитного поля статора, поэтому такие двигатели называются асинхронными. Отставание вращения ротора относительно магнитного поля статора называется скольжением. Оно составляет 3-6%.
При скорости вращения магнитного поля 3000 об/мин ротор вращается со скоростью 2800 об/мин. Если в статор двигателя уложено шесть обмоток (две пары полюсов), то поле статора вращается со скоростью 1500 об/мин, а ротор — со скоростью 1400 об/мин.
На рисунке ниже изображен асинхронный двигатель в разобранном виде.
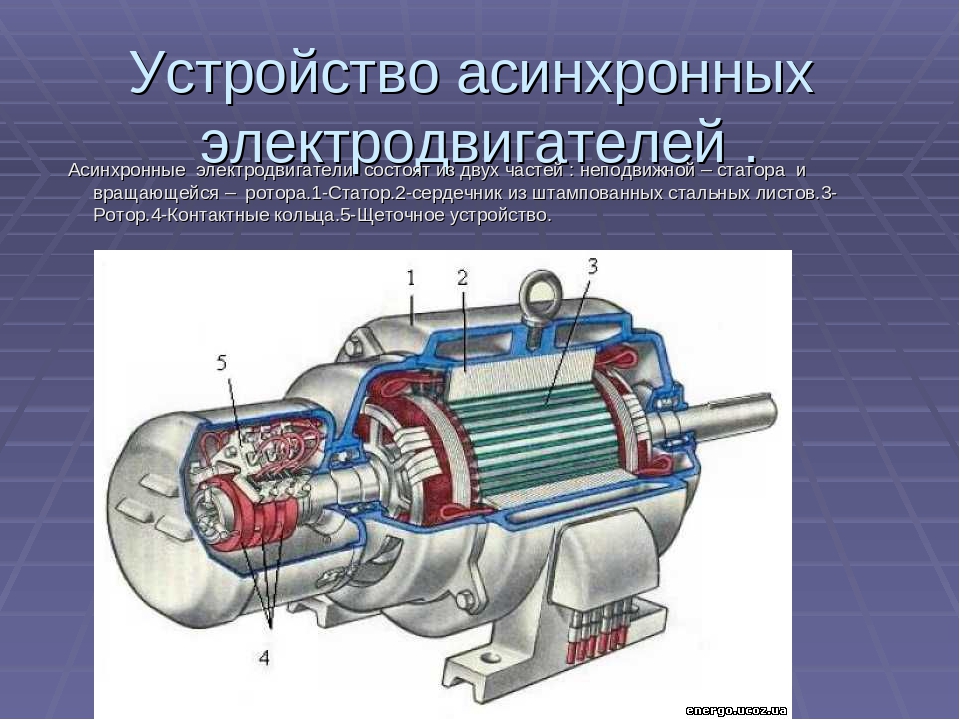
Конструктивно асинхронный двигатель, как и всякая электрическая машина, состоит из двух основных частей: неподвижной части — статора и вращающейся части — ротора.
Статор имеет три обмотки, расположенные на кольцевом сердечнике и смещенные в пространстве на 120°, а ротор имеет обмотку в виде многих короткозамкнутых витков, уложенных на цилиндрическом сердечнике. Обмотка ротора без сердечника похожа на беличье колесо и называется коротко-замкнутой или обмоткой беличьего колеса. Она представляет собой стержни, замкнутые по торцам кольцами.
Асинхронные двигатели просты по устройству, надежны в работе. Они применяются во всех отраслях народного хозяйства. Из общего количества электродвигателей, изготавливаемых заводами, асинхронные двигатели составляют примерно 95%.
К недостаткам этих двигателей относятся: 1) невозможность получить постоянное и точное число оборотов на валу; 2) при пуске имеют большой ток; 3) чувствительны к колебаниям напряжения в сети.
Квартирная электропроводка является однофазной. Поэтому для использования трехфазного асинхронного двигателя в домашних условиях необходимо подключать дополнительно конденсаторы. На рис. справа показано включение трехфазного двигателя в однофазную сеть.
Недостатком этого способа подключения трехфазных двигателей в однофазную сеть является использование дорогостоящих бумажных конденсаторов большой емкости. Так, на каждые 100 Вт мощности нужен конденсатор емкостью 10 мкФ, рассчитанный на напряжение 250-450 В.
Наряду с трехфазными асинхронными двигателями применяются однофазные асинхронные двигатели. Эти двигатели имеют на статоре две обмотки: рабочую и пусковую. Обмотки расположены под углом 90° относительно друг друга. При включении в сеть обмоток образуется вращающееся магнитное поле и короткозамкнутый ротор приходит во вращение так же, как у трехфазного асинхронного двигателя. При этом появляется скольжение ротора и пусковая обмотка может быть отключена с помощью индукционного выключателя или специального реле.
Электродвигатели обладают большими преимуществами по сравнению с другими видами двигателей (паровыми, внутреннего сгорания): они экологичны—при работе не выделяют вредных газов, дыма или пара; экономичны — для них не нужен запас топлива и воды; их легко установить в любом доступном месте (на стене, под полом трамвая, троллейбуса, в корпусе игрушки и т. д.).
Для нужд народного хозяйства промышленность выпускает большое количество разнообразных электродвигателей: от миниатюрных, например для игрушек и моделей, до двигателей огромных размеров — для кораблей, электровозов. Электродвигатели различаются не только размерами, но и назначением, конструкцией, частотой вращения ротора.
На электротехнических предприятиях изготовлением электродвигателей занимаются рабочие разных профессий. Намотку катушек статора и ротора, соединение отдельных их частей осуществляют электромонтеры-обмотчики. Собирают электродвигатели слесари-сборщики. Они должны владеть навыками выполнения не только электромонтажных, но и слесарных работ.
Двигатель электромобиля — принцип работы, устройство, виды
По планам многих автоконцернов – именно за тяговым двигателем для электромобиля – будущее. Так известно, что в плане развития известного гиганта Bentley Motors значится, что к 2030-му году компания полностью трансформируется в производителя электроавтомобилей. На электродвигатели ставки также делают такие известные на весь мир компании, как Nissan, Volvo, Aston Martin.Тенденции таковы, что в массовом производстве сейчас больше представлены легковые электромобили и городской электротранспорт (согласно планам, в ряде таких стран как, к примеру, Франция и Норвегия в 2025-2030-м гг. автобусы в городах будут полностью заменены на электротранспорт).
Но чувствуется интерес и к установке электромоторов на грузовой транспорт. Особенно электродвигатели интересны производителям городских развозных фургонов, терминальных тягачей и коммунальных грузовиков.
На весь мир уже хорошо известен седельный тягач капотного типа Tesla Semi, в коммунальном хозяйстве США активно не первый год используют мусоровозы PETERBILT на электротяге, в Евросоюзе возрастает интерес к седельному тягачу с электродвигателем Emoss Mobile Systems B.V. и Renault Trucks –развозному автомобилю для продуктов.
На постсоветском пространстве свой коммерческий электротранспорт пока только начинает появляться, но уже активно говорят про грузовик МАЗ-4381Е0 (на грузовике установлен асинхронный тяговый электродвигатель мощностью 70 кВт (95 л.с.), ориентированный на транспортировку грузов в черте города, и электрогрузовик Moskva опытно-конструкторского бюро Drive Electro (главное назначение — доставка товаров в магазины). Не за горами время, когда этот коммерческий транспорт с электромоторами будет активно востребован автопарками, логистическими центрами, предприятиями.
Также, безусловно, давно, как данность мы принимаем, что на электродвигателе работают трамваи, троллейбусы, погрузчики на складах и локомотивы. Трёхфазный асинхронный двигатель помогает двигаться на давно полюбившихся поездах «Ласточка» и «Сапсан».
Принцип работы
Принцип работы двигателя электромобиля основан на преобразовании электроэнергии в механическую энергию вращения. Главные участники преобразования энергии – статор и ротор.Как работает традиционный электромотор?
- Магнитное поле статора действует на обмотку ротора.
- Возникает вращающий момент.
- Ротор начинает двигаться.
Наглядная схема двигателя электромобиля в системе электропривода представлена ниже:
Важная особенность классического электрокара – отсутствие дифференциала, коробки передач, передаточных устройств с шестеренками. Энергия от электромотора поступает прямо на колеса.
Без коробки передач – и большинство «гибридов» с электродвигателем и ДВС. Исключение – «гибриды» с параллельной схемой передачи на колёса крутящего момента. К ней мы ещё вернёмся в этой статье в разделе, посвящённом гибридным автомобилям.
Принцип работы любого электродвигателя базируется на процессах взаимного притяжения и отталкивания полюсов магнитов на роторе и статоре. Движение осуществляется под действием самого магнитного поля и инерции.
Устройство
Как устроен двигатель электромобиля?При описании принципа работы электродвигателя, уже было упомянуто, что главные компоненты двигателя электромобиля– ротор и статор.
- Ротор – это вращающийся компонент двигателя.
- Статор находится в неподвижном состоянии. Он ответственен за создание неподвижного магнитного поля.
Ротор
Классический ротор автомобиля состоит из сердечника, обмотки и вала. У некоторых электродвигателей в состав ротора также входит коллектор.- Сердечник – это металлический стержень, на периферии которого располагается обмотка. Непосредственно через сердечник происходит замыкание магнитной цепи электродвигателя. Сердечник изготавливается из стальных пластин круглой формы. По структуре похож на слоёный пирог. При производстве сердечников используют изолированные листы стали с присадками кремния. В этом случае обеспечены увеличение КПД электродвигателя, наименьшие удельные потери в металле на единицу массы, снижение величины размагничивающих вихревых токов Фуко, которые возникают из-за перемагничивания сердечника. На поверхности сердечника есть продольные пазы. Через них прокладывается обмотка.
- Вал – металлический стержень, который непосредственно передаёт вращающий момент. Также изготавливается из электротехнической стали. Служит основой для насаживания сердечника. На концах вала есть резьба, выемки под шестерёнки, подшипники качения, шкивы.
- Коллектор – блок, крепящийся на валу. Представляет собой систему медных пластин. Изолирован от вала. Служит выпрямителем переменного тока, переключателем-автоматом направления тока (в зависимости от вида электродвигателя).
Статор (индуктор)
Статор состоит из станины, сердечника и обмотки:- Станина статора – корпус статора. Как правило, корпус бывает алюминиевым или чугунным. Алюминиевые станины популярны у электродвигателей легковых авто, чугунные – у спецтехники, которая вынуждена работать в условиях высокой вибрации. Станина служит базой крепления основных и добавочных полюсов.
- Сердечник статора – цилиндр из профилированных стальных листов. Фиксируется винтами внутри станины. Снабжён пазами для обмотки.
- Обмотка. Создаёт магнитный поток. При пересечении проводников ротора наводит в них электродвижущую силу.
Виды
Электродвигатели классифицируют по типу питания привода, конструкции щеточно-коллекторного узла, количеству фаз для запитывания:- По типу питания привода. Устройства делятся на моторы переменного и постоянного тока. Двигатели постоянного тока способны обеспечить более точную и плавную регулировку оборотов, высокий КПД. Двигатели переменного тока выручают, когда важна высокая перегрузочная способность. Это удачный вариант для подъёмно-транспортных машин. Впрочем, существуют и универсальные моторы, которые функционируют от переменного и постоянного тока.
- По конструкции щеточно-коллекторного узла. Выпускаются бесколлекторные и коллекторные моторы. Бесколлекторный мотор работает за счёт движения ротора с постоянным магнитом. У конструкции нет щеточно-коллекторного узла. Решение обеспечивает достойный крутящий момент, широкий диапазон скоростей и высокий КПД. Важные преимущества бесколлекторного мотора – надёжность, способность к самосинхронизации, возможность подпитываться при переменном напряжении. Ресурс бесколлекторного мотора ограничен исключительно ресурсом подшипников. У коллекторных моторов присутствует щелочно-коллекторный узел. Удобство решения связано с тем, что он может использоваться и в качестве переключателя тока в обмотках, и как извещатель положения ротора, нет необходимости в контролле. Проблема коллекторных моделей – в том, что они зависимы от постоянных магнитов, которые, как известно, со временем, к огромному сожалению, теряют свои свойства.
- По количеству фаз для запитывания. В зависимости от того, как запитывается обмотка, электродвигатели бывают однофазными и трёхфазными. В автомобилестроении широкое распространение получили трёхфазные решения, это связано с рядом технических характеристик (мощность, перегрузочная способность, частота вращения на холостом ходу).
Асинхронные и синхронные двигатели
Синхронные моторы – двигатели переменного тока, у которых частота вращения ротора идентична частоте вращения магнитного поля (измерение производится в воздушном зазоре). В автомобилестроении синхронные моторы встретить можно нечасто (хотя в мире техники – это, в целом, очень популярное решение – особенно в климатотехнике, насосных системах).Но есть производители авто, которые при производстве электрокаров предпочитают устанавливать на свои машины именно синхронные двигатели. Яркий пример – концерн Renault. Синхронными двигателями на электромагнитах он оснастил электрокар Renault Zoe. На электромагниты подаётся постоянный ток. Полярность магнитов ротора стабильна. Полярность магнитов статора при этом изменяется и обеспечивает бесперебойное вращение.
Преимущество синхронных двигателей на электромагнитах у авто – максимальная оптимизация рекуперации энергии торможения. И главный «конёк» авто с таким типом электродвигателя – полная безопасность при буксировке.
Гораздо более популярный вариант – асинхронные двигатели. Это двигатели переменного тока, у которых потенциал напряжения – магнитного поля не совпадает с частотой вращения ротора. Типичным 3-фазным асинхронным двигателем оснащены, например, хорошо известные автомобили Tesla S и Tesla Х.
Иногда асинхронные моторы называют индукционными, так как в роторе в соответствие с законом Ленца у них индуцируется электромагнитная сила.
Двигатель-колесо
Обособленно среди электромоторов стоит двигатель-колесо. Особенность двигателя- колеса – ориентир крутящего момента и силы напряжения на конкретное колесо.Такие решения можно встретить в плагин-гибридных автомобилях («гибридах» с параллельной схемой, при описании устройства гибридных авто ниже по тексту мы остановимся на них подробнее). Работает двигатель-колесо в паре с ДВС.
У первых плагин-гибридных автомобилей с двигателем-колесом агрегат был монтирован в ступицу колеса, а работа осуществлялась исключительно в паре с внутренним зубчатым редуктором.
Некоторые же современные модели моторов, монтируемые внутри колёс, вполне могут работать без зубчатого редуктора. Это увеличивает управляемость, позволяет избежать увеличения удельного веса шасси, уменьшить риски, повышает КПД.
Преимущества и недостатки электродвигателей
Преимуществ у электродвигателей существенно больше, нежели недостатков. Более того, за счёт усовершенствования и конструктивных особенностей самих электроприводов, и инфраструктуры, связанной с зарядкой, многие вещи, которые вчера ещё казались критичными, сегодня теряют свою актуальность.Преимущества
- Не требуется «раскачка». Крутящий момент достигает максимума непосредственно при включении. Именно по этой причине электрический двигатель электромобиля не требует наличия стартеров и сцеплений – неотъемлемых спутников ДВС.
- Удобство. Для включения заднего хода (то есть коррекции со стороны вращения мотора) достаточно поменять полярность, сложная коробка передач не требуется.
- Высокий КПД. У машин с электродвигателями он достигает 95 %.
- Независимость. На любой отметке скорости достигается максимальный показатель крутящего момента.
- У мотора – малый вес. Производители могут себе легко позволить создавать компактные автомобили.
- Есть все возможности для рекуперации энергии торможения. Если у авто с ДВС кинетическая энергия просто уходит в колодки (и стирает их), то у электромобиля в режиме рекуперации мотор может функционировать как генератор. В режиме генерации электроэнергия просто трансформируется в другую форму и быстро накапливается в АКБ. Особенно решение эффективно для транспортных средств с длинным тормозным путем. На объём генерируемой и накопленной энергии существенно влияет маршрут (рельеф, в частности наличие холмистых участков на дороге и уклон дороги).
- Снижение расходов на эксплуатацию машины. Зарядку можно производить от электросети. Это существенно дешевле, нежели использование дизеля, бензина. Выгода очевидна даже по сравнению с бензиновыми авто эконом-класса.
- Малый уровень шума.
- В большинстве случаев для мотора не требуется принудительное охлаждение.
- Экологичность. Использование транспорта с электродвигателем снижает количество выхлопных газов в воздухе.
Недостатки
Долгое время считалось, что самый большой минус использования электродвигателя – его зависимость от аккумуляторов, которые быстро выходят из строя. Теперь это неактуально. Современные батареи электрокаров, представленных в массовом выпуске, гарантируют пробег автомобиля 150-200 тыс. км. Потерял актуальность и тот фактор, что машины с электродвигателем существенно уступают бензиновым по мощности. Электротяга современных электромоторов уже не уступает ДВС.Поэтому недостатки электродвигателей сейчас правильно свести не к недостаткам конструкции, а к плохо развитой инфраструктуре для того, чтобы подзаряжать электромобили. Если в США, Скандинавии подзарядить электрокар легко, то до недавнего момента даже в Западной и Центральной Европе с инфраструктурой для подзарядки таких машин были проблемы.
В России, Беларуси, Украине, Казахстане, пока, увы, с инфраструктурой ситуация ещё хуже. Хотя, например, в России число заправок для электрокаров с 2018 по 2020 год возросло в 3 раза, но полотно покрытия площадками для зарядки очень неоднородное. В Москве – более плотное, в регионах – слабое. Даже разрыв с такими городами-гигантами как Санкт-Петербург и Челябинск — колоссальный.
Устройство электромобиля
Рассматривая электродвигатель, важно остановиться на устройстве электромобиля в целом, изучение электродвигателя не самого по себе, а как части системы электропривода, где электродвигатель – один из его базовых компонентов, его «сердце». Но «организм», функционирует только тогда, когда в порядке все другие «органы» – части электропривода:- Аккумуляторная батарея.
- Бортовое зарядное устройство. Его функция – обеспечение возможности заряжать аккумуляторную батарею от бытовой электрической сети.
- Трансмиссия. Распространены трансмиссия с одноступенчатым зубчатым редуктором (чаще всего встречающийся и наиболее простой вариант) и бесступенчатая трансмиссия с гидротрансформатором (для старта с места), плавно изменяющие отношение скоростей вращения и вращающих моментов мотора и ведущих колес транспортного средства во всём рабочем диапазоне скоростей и тяговых усилий.
- Инвертор. Назначение инвертора – трансформирование высокого напряжения постоянного тока аккумулятора в трехфазное напряжение переменного тока.
- Преобразователь постоянного тока. Функция – зарядка дополнительной батареи, которая используется для системы освещения, кондиционирования, аудиосистемы.
- Электронная система управления (блок управления). Отвечает за управление функциями, связанными с энергосбережением, безопасностью комфортом. В её «подчинении» – оценка заряда АКБ, оптимизация режимов движения, регулирование тяги, контроль за использованной энергией и за напряжением, управлением ускорением и рекуперативным торможением.
Аккумуляторная батарея
Аккумуляторная батарея (аккумулятор) – один из наиболее дорогих компонентов системы. По своей значимости играет такую же роль, как бензобак для ДВС. Электромобиль движется за счёт электричества, полученного от электросети во время зарядки и хранящегося в АКБ.При этом важно помнить, что у большинства электромобилей устанавливаются одновременно два аккумулятора: один тяговой – он питает именно мотор и стартерный (как и в машинах с ДВС, он помогает системе освещения, системе подогрева). Эти аккумуляторы разные не только по назначению, но и техническим характеристикам.
Тяговый аккумулятор электрического двигателя электромобиля предназначен для питания мотора, запуска двигателя. У него нет высокого пускового тока, но он заточен на длительную работу, выдерживает большое количество циклов заряда-разряда.
Типичная тяговая АКБ – моноблочная секционная конструкция. Тяговая АКБ состоит из толстых электронных пластин – пористых сепараторов и электролитного вещества.
Самые распространенные аккумуляторы – литий-ионные. У них – наиболее высокая энергетическая плотность, не требуется обслуживание, достаточно низкий саморазряд.
Устройство и особенности гибридных систем
Свои особенности – у гибридных систем. В гибридных системах электродвигатель может рассматриваться и как «партнёр» ДВС, и как допэлемент, помогающий добиться экономии топлива и при этом повышения мощности.
Устройство «гибрида» отличается в зависимости от реализованной схемы передачи на колёса крутящего момента.
- Параллельная. Аккумуляторы передают энергию электромотору, бак – топливо для ДВС. Оба агрегата равноправны и способны создать условия для перемещения авто. Но работает такая схема только при наличии коробки передач. Параллельная схема успешно реализована у автомобиля Honda Civic. Нередко гибриды с параллельной схемой выделяют в отдельную группу и называют плагин-гибридными.
- Последовательная. Любое действие начинается с включения ДВС. Он же отвечает за последующие действия: поворот генератора для запуска электромотора, зарядку аккумуляторов.
- Последовательно-параллельная. Через планетарный редуктор соединены ДВС, электродвигатель и генератор. В зависимости от условий движения может использоваться тяга электродвигателя или ДВС. Режим выбирается программно системой управления транспортного средства. Среди хорошо известных последовательно-параллельных «гибридов» – Toyota Prius, Lexus-RX 400h.
Классический гибридный автомобиль использует интегрированный в трансмиссию электрический мотор-генератор.
При этом для получения электрической тяги у гибридных систем задействованы четыре базовых компонента:
- Мотор-генератор. Является обратимой силовой установкой. Может работать в двух режимах: непосредственно тягового мотора и генератора для зарядки высоковольтной аккумуляторной батареи. При работе в режиме мотора возможно создание крутящего момента и мощности, которых хватит для старта и движения автомобиля с выключенным ДВС, при работе устройства в режиме генератора продуцируется высоковольтная электроэнергия.
- Высоковольтные силовые кабели. Изолированные электрические кабели большого сечения. Важны для переноса энергии между компонентами высоковольтных электроцепей.
- Высоковольтные аккумуляторные батареи. Включенные в последовательную цепь аккумуляторные элементы. Позволяют накопить в батарее большой объём электроэнергии.
- Высоковольтный силовой модуль управления для управления потоком электроэнергии для движения транспортного средства на электрической тяге.
Гибридные авто открывают новые эксплуатационные возможности, с одной стороны можно быть максимально экологичным, радоваться комфортной езде и сэкономить на топливе, а с другой стороны, при разряде аккумулятора владелец авто не попадёт впросак, если невозможно подзарядить мотор: в работу вступит ДВС.
Перспективы применения электродвигателей в автомобилях
Перспективы применения электродвигателей в автомобилях напрямую связаны с тем, насколько активно будет развиваться инфраструктура. Там, где она не обеспечена, использование электрокаров действительно ограничено. Ведь без подзарядки у многих авто – малая дальность пробега.Впрочем, даже последняя проблема активно решаемая. Немецкие и японские разработчики (компании DBM Energy, Lekker Energie, Japan Electric Vehicle Club) сумели доказать миру: потенциал у электродвигателей, аккумуляторов без подзарядки может достигать 500 -1000 тысяч километров пробега. Правда, пока что 1 000 тысяч км пробега без подзарядки возможны только в теории, а 500-600 уже на практике.
На данный момент доступность такого транспорта – на уровне инженерно-конструкторской работы, экспериментальных выпусков, но есть перспективы что их подхватят автогиганты, и не за горизонтом – серийное производство.
Перспективы применения электродвигателей в автомобилях очень тесно связаны и с политикой отдельных государств. Например, в Норвегии обладатели электромобилей освобождены от уплаты ежегодного налога на транспорт, пользования платными дорогами, паромными переправами и даже большинством парковок. С учётом того, что налоги и тарифы в Скандинавии одни из самых высоких, мотивация приобрести именно авто с электродвигателем, а не ДВС – очень высокая.
Обратите внимание, что на базе LCMS ELECTUDE есть специальный раздел “Электрический привод”, в нём подробно разбираются электродвигатели, виды электропривода, системы зарядки, особенности обслуживания транспорта с электромотором. Кроме комплексных теоретических знаний в обучающих модулях приводятся многочисленные практические примеры.
Особенности пуска асинхронных электродвигателей | RuAut
На сегодняшний день асинхронные электродвигатели являются самыми распространёнными потребителями электроэнергии в мире и используются повсеместно, начиная от бытовых устройств, таких как пылесос, холодильник или вентилятор и заканчивая крупными промышленными установки, в которых мощность электродвигателей измеряется в мегаваттах. Это насосные станции, конвейеры, горнодобывающие установки, системы вентиляции или дымоудаления и т.д. Согласно статистики в мире используется около 300 миллионов трехфазных асинхронных электродвигателей с напряжением 380В.
Ежегодно около 10% из этих электродвигателей выходят из строя из-за неправильной эксплуатации, перегрузок или аварийных режимов работы. Часто выход из строя связано с процессом пуска асинхронного электродвигателя, когда он должен набрать номинальную скорость вращения в механизмах с большим моментом инерции. Соответственно момент пуска для асинхронного электродвигателя является тяжелым режимом работы с большой механической и электрической нагрузкой. Пусковые токи асинхронного электродвигателя могут превышать номинальные в 10 – 12 раз.
Виды пуска электродвигателей и их особенности
Прямой пуск асинхронного электродвигателя – это наиболее традиционный способ пуска, который используется с момента появления электродвигателей и до настоящего времени. Это наиболее технически просто реализуемое и экономически выгодное решение, позволяющее запустить электродвигатель при номинальном напряжении. При таком способе пуска используется минимальный набор коммутационного оборудования, однако в настоящее время он в основном применяется для пуска электродвигателей небольших мощностей в связи с определенным количеством недостатков, который можно разделить на 2 категории: электрические и механические.
Электрические проблемы:
При прямом пуске асинхронного электродвигателя происходит довольно большой бросок тока, который приводит к падению напряжения в питающей сети. А также может привести к срабатыванию защиты, особенно в случаях, когда не применяется специальные аппараты для защиты электродвигателя. Кроме того, в случае затяжного пуска, длительное протекание тока превышающего номинальный в 6 -8 раз оказывает значительное тепловое и электродинамическое воздействие как на кабель подключенный к электродвигателю, так и на обмотки асинхронного электродвигателя, что приводит к их повышенному износу.
Механические проблемы:
Высокий начальный пусковой момент может привести к значительному толчку и, следовательно, к существенной нагрузке на механизмы электропривода, такие как ремни или крепления узла подшипника. Это вызывает их сокращение срока службы или полный выход из строя. В случае особо ответственных производств простои оборудования в течение времени пока будет производиться ремонт могут привести к значительным убыткам. При останове, как и при пуске, возникают сильные механические вибрации, вызванные переходными процессами. Они не позволяют осуществить синхронную работу нескольких независимых узлов в сложных станках линиях или установках.
Пуск по схеме звезда-треугольник, также является одним из известных способов пуска асинхронных электродвигателей. Этот метод используется для снижения механических нагрузок и ограничения пускового тока. Но и у него есть несколько недостатков. Во-первых, электродвигатель обязательно должен иметь 6 клемм для подключения питания. Во-вторых, для пуска по данной схеме необходимы 3 контактора, что опять же увеличивает стоимость и габариты установки. При переключении со схемы звезда на схему треугольник все равно происходит, пусть и кратковременный, но большой по амплитуде бросок тока. В-третьих, требуется использование двух кабелей от пункта управления до электродвигателя, что в случае длинных линий достаточно дорого. И последний недостаток заключается в том, что останов электродвигателя при подобной схеме подключения точно такой же как и при прямом пуске.
Третий способ пуска – использование устройств плавного пуска.
Устройство плавного пуска – это механическое, электронное или электромеханическое устройство, используемое для плавного пуска или останова электродвигателей. Благодаря применению устройства плавного пуска можно одновременно обеспечить плавный разгон и останов асинхронного электродвигателя, добиться улучшения стабильности электрических сетей, то есть уменьшить броски тока при пуске и значительно уменьшить просадки напряжения в сети при тяжелом пуске. Кроме того, использование систем плавного пуска минимизируют механические перегрузки оборудования при пуске и останове, уменьшает износ механизмов и тем самым увеличивает срок службы асинхронных электродвигателей, редукторов, муфт и других деталей привода. Поэтому самым оптимальным решением по соотношению функционал – стоимость для пуска асинхронных электродвигателей, в случае если нет необходимости постоянного регулирования скорости, являются устройства плавного пуска.
Прочитайте о принципе действия и преимуществах устройств плавного пуска (УПП)
Типы электродвигателей
Электродвигатели теперь более разнообразны и адаптируемы, чем когда-либо прежде. При планировании системы управления движением чрезвычайно важен выбор двигателя. Двигатель должен соответствовать назначению и общим рабочим характеристикам системы. К счастью, существует конструкция двигателя, подходящая для любых мыслимых целей.
К наиболее распространенным электродвигателям, используемым сегодня, относятся:
Бесщеточные двигатели переменного тока
Бесщеточные двигатели переменного токаявляются одними из самых популярных в управлении движением.Они используют индукцию вращающегося магнитного поля, генерируемого в статоре, для вращения как статора, так и ротора с синхронной скоростью. Для работы они полагаются на постоянные электромагниты.
Щеточные двигатели постоянного тока
В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток. В некоторых моделях решающее значение имеет ориентация щетки относительно сегментов стержня ротора. Коммутатор особенно важен в любой конструкции щеточного двигателя постоянного тока.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного токабыли впервые разработаны для достижения более высоких характеристик в меньшем пространстве, чем щеточные двигатели постоянного тока, и они меньше, чем сопоставимые модели переменного тока.Встроенный контроллер используется для облегчения работы при отсутствии контактного кольца или коммутатора.
Прямой привод
Прямой привод — это высокоэффективная технология с низким уровнем износа, которая заменяет обычные серводвигатели и сопутствующие им трансмиссии. Эти двигатели не только намного легче обслуживать в течение длительного периода времени, но и ускоряются быстрее.
Линейные двигатели
Эти электродвигатели имеют раскрученный статор и двигатель, создающий линейную силу по длине устройства.В отличие от цилиндрических моделей, они имеют плоскую активную секцию с двумя торцами. Как правило, они быстрее и точнее вращающихся двигателей.
Серводвигатели
Серводвигатель — это любой двигатель, соединенный с датчиком обратной связи для облегчения позиционирования; Таким образом, серводвигатели являются основой робототехники. Используются как поворотные, так и линейные приводы. Недорогие щеточные двигатели постоянного тока широко распространены, но их заменяют бесщеточные двигатели переменного тока для высокопроизводительных приложений.
Шаговые двигатели
В шаговых двигателяхиспользуется внутренний ротор, управляемый электроникой с помощью внешних магнитов.Ротор может быть изготовлен на постоянных магнитах или из мягкого металла. Когда обмотки находятся под напряжением, зубья ротора выравниваются по магнитному полю. Это позволяет им перемещаться от точки к точке с фиксированным шагом.
Перед тем, как начать работу над какой-либо новой системой, тщательно подумайте о конкурирующих свойствах различных двигателей. Выбор правильного двигателя позволяет лучше начать любой проект.
Готовы узнать больше? Ознакомьтесь с курсом «Основы проектирования электродвигателей», предлагаемым колледжем движения и моторизации MCMA.
Типы электродвигателей и их использование
Знание о различных типах электродвигателей всегда полезно из-за широкого использования двигателей от бытовых до промышленных. Если у вас есть система кондиционирования воздуха дома или вы используете воздушный компрессор на промышленном предприятии, вы используете электродвигатели. Таким образом, если вы знаете о различных типах электродвигателей, вы сможете лучше понять систему, которой владеете, и лучше контролировать ее работу.
Здесь, в Linquip, мы предоставили вам удобную платформу, чтобы вы могли найти тип электродвигателя, который вам нужен для вашего приложения. Кроме того, в этом посте мы пытаемся демистифицировать различные типы электродвигателей для вашей справки. Итак, следите за обновлениями!
Что такое электродвигатели?
Прежде чем узнать о различных типах электродвигателей, лучше начать с вопроса «что такое электродвигатель»? Что ж, самый короткий ответ заключается в том, что электродвигатель или просто двигатель — это электромеханическое устройство, которое получает электрическую энергию и преобразует ее в движение или механическую энергию.
Изображение из проекта по повышению осведомленности о стандартах устройств.Это движение в основном имеет вращательную форму. Поток электрического тока индуцирует магнитное поле, и в электродвигателе возникает вращательное движение, перпендикулярное направлению тока и магнитного поля.
Применение электродвигателей
Электродвигатели могут использоваться в быту, например, в таких электроприборах, как кондиционеры, пылесосы, вентиляторы, кухонные комбайны и т. Д.все они по-своему используют вращательную силу электродвигателей или даже в игрушках, таких как игрушечные машинки или модели самолетов с дистанционным управлением или с помощью приложений.
Говоря об электрических моделях транспортных средств, более крупные и сложные версии электродвигателей можно найти в электромобилях и самолетах реальных размеров (ну, эти самолеты все еще изучаются, чтобы стать коммерчески доступными).
И последнее, но не менее важное: некоторые типы электродвигателей широко используются в промышленности, например, в промышленных газовых компрессорах, насосах, подъемных транспортных средствах, смесителях и т. Д.
Способы классификации электродвигателей
Различные типы электродвигателей можно классифицировать по-разному. Один из способов классификации основан на их вольерах. У нас есть двигатели Open Drip Proof (ODP), подходящие для чистых, сухих и закрытых помещений, усовершенствованной версией которых являются двигатели с защитой от атмосферных воздействий с конфигурацией корпуса WP1 или WP2. У нас также есть полностью закрытые корпуса с вентиляторным охлаждением (TEFC), полностью закрытые надувные кожухи (TEAO), полностью закрытые с принудительной вентиляцией (TEFV) и полностью закрытые без вентиляции (TENV) для различных типов электродвигателей.Существуют также взрывозащищенные (Ex) двигатели, используемые во взрывоопасных зонах с возможностью взрыва из-за присутствия в этой зоне некоторых взрывоопасных жидкостей, пыли и т. Д.
Тем не менее, электродвигатели обычно классифицируют по источнику питания. Существуют двигатели переменного тока или двигатели переменного тока, в которых ток меняет направление с некоторой частотой. Существуют также двигатели постоянного или постоянного тока, которые широко используются в небольших приложениях из-за их легкого регулирования скорости.
Двигатели переменного тока подразделяются на однофазные и трехфазные.Однофазный двигатель может достигать мощности около 3 кВт при питании от однофазного источника питания, что характерно для бытовых и коммерческих приложений. С другой стороны, трехфазный двигатель может производить мощность до 300 кВт. Эти двигатели — идеальный выбор для промышленного применения.
Двигатели переменного тока
Как упоминалось ранее, двигатель переменного тока является одним из типов электродвигателей, в которых используется ток переменного направления. Эти двигатели не так легко регулируются по скорости, как двигатели постоянного тока; однако, с небольшими потерями в мощности, можно использовать двигатели переменного тока с частотно-регулируемыми приводами, чтобы лучше регулировать скорость.
Существует два широко используемых типа двигателей переменного тока и еще один менее распространенный тип:
- Асинхронные двигатели
Асинхронный двигатель — это механизм, который никогда не работает с синхронной скоростью. Этот двигатель преобразует электрическую энергию в механическую, используя явление электромагнитной индукции. В этих типах электродвигателей магнитное поле вращается в статорах, которые индуцируют ток в роторе, что приводит к вращению двигателя.Поскольку вращение ротора вызывается внешним магнитным полем, эти двигатели возбуждаются извне. Существует два типа асинхронных двигателей в зависимости от конструкции ротора: асинхронные двигатели с короткозамкнутым ротором и асинхронные двигатели с фазной обмоткой.
В синхронных типах электродвигателей происходит прямое приложение магнитного поля к обмоткам ротора, что имеет свои недостатки и преимущества. Такие двигатели с внутренним возбуждением требуют иных требований к защите и управлению, чем асинхронные двигатели.
Существуют также линейные типы электродвигателей, в которых статор и ротор не вращаются, и поэтому они создают линейную силу вместо крутящего момента. Этот тип двигателя обычно используется в раздвижных дверях и приводах.
Асинхронный двигатель
Асинхронный двигатель — это один из типов электродвигателей Elector, который, вероятно, наиболее широко используется в промышленности. Статор намагничивается из-за его подключения к электросети, затем магнитное поле индуцирует напряжение и, следовательно, ток в обмотках ротора, затем индуцированный ток в роторе создает другое магнитное поле, а затем взаимодействие между этими двумя магнитными полями. создает вращающую силу или крутящий момент, приводящий в движение вал двигателя.
Эти двигатели имеют очень простую конструкцию, прочную конструкцию, низкую цену и простоту обслуживания. Они также имеют широкий диапазон номинальной мощности, как уже было сказано, наиболее широко используемые типы электродвигателей. Тем не менее, регулирование скорости непросто без частотно-регулируемого привода, который заставляет двигатель работать с запаздывающим коэффициентом мощности.
Асинхронный двигатель выпускается двух различных типов: с короткозамкнутым ротором, асинхронный двигатель и асинхронный двигатель с фазным ротором , , как упоминалось ранее.Каждый из этих двигателей также может быть однофазным или трехфазным. Однофазные асинхронные двигатели — менее распространенный тип асинхронных двигателей в промышленности. Сообщается, что трехфазный асинхронный двигатель является одним из типов электродвигателей, которые присвоили себе около 70% доли рынка промышленных асинхронных двигателей.
Двигатель с фазным ротором или электродвигатель с фазным ротором имеет больше витков обмотки, что означает, что он имеет более высокое наведенное напряжение и снижает ток, чем асинхронный электродвигатель с короткозамкнутым ротором.Они также могли производить больший пусковой крутящий момент. С другой стороны, их сложнее производить из-за добавленного количества компонентов по сравнению с асинхронными двигателями с короткозамкнутым ротором, что значительно увеличивает их удельную стоимость, а также затраты на их обслуживание.
- Ротор с короткозамкнутым ротором Асинхронный двигатель изготовлен из параллельно расположенных токопроводящих шин, закороченных на обоих концах закорачивающими кольцами.
- Однофазные асинхронные двигатели с короткозамкнутым ротором имеют одну обмотку статора, и всегда есть какое-то другое устройство, запускающее двигатель.Они идеально подходят для приложений, требующих всего несколько лошадиных сил, например, для бытовой техники. До сих пор они были наиболее широко используемыми для бытовой техники.
- Трехфазные асинхронные двигатели с короткозамкнутым ротором могут работать с высокими требованиями к мощности; их номинальная мощность может варьироваться от очень небольшой до сотен лошадиных сил. Они тоже самозапускаются. Почти 90% трехфазных асинхронных двигателей, используемых в промышленности, таких как насосы, компрессоры и вентиляторы, относятся к типу с короткозамкнутым ротором.
- Ротор Асинхронный двигатель имеет распределенную обмотку, состоящую из двух слоев. Причина названия в том, что ротор этих типов электродвигателей намотан на столько же полюсов, сколько и статор. Из-за более высокой стоимости двигатели с фазным ротором рассматриваются в ситуациях, когда требуется высокий пусковой момент.
- Однофазные двигатели с фазным ротором подходят для более высоких номинальных мощностей, чем их аналоги с короткозамкнутым ротором.Они могут довольно комфортно стартовать и могут очень хорошо разгоняться. Некоторые машины, превышающие размеры бытовой техники, могут использовать эти типы электродвигателей, например, в сельском хозяйстве, небольших воздушных компрессорах, горнодобывающей промышленности и т.д. моторы используются в промышленности, но имеют хорошие характеристики своих братьев с короткозамкнутым ротором.
см. Здесь видео о том, как работает асинхронный двигатель.
Синхронные двигатели
В отличие от асинхронных двигателей, синхронные двигатели в основном не самозапускаются, несмотря на некоторые самовозбуждающие конфигурации, которые можно найти для некоторых небольших приложений. Создание магнитного поля ротора для этих типов электродвигателей не зависит от тока, а скорость вращения синхронного двигателя привязана к частоте сети. Другими словами, вращение вала синхронных электродвигателей происходит с синхронизацией скорости с частотой питающего тока.
Что делает их интересными для промышленных предприятий с более высокими требованиями к мощности, так это их высокая эффективность преобразования переменного тока в работу и их способность корректировать коэффициент мощности. Это означает, что они могут работать при единичном коэффициенте мощности, что предполагает равную активную мощность нагрузки с полной мощностью цепи.
Синхронные двигатели переменного тока бывают двух типов: без возбуждения и с возбуждением постоянным током. Синхронные электродвигатели без возбуждения подразделяются на три категории: с постоянным магнитом, реактивным сопротивлением и гистерезисным типом.
Синхронные двигатели без возбуждения
Электродвигатели синхронного типа без возбуждения спроектированы таким образом, чтобы их ротор следовал синхронизированному вращающемуся полю на разных этапах, что создавало бы постоянное поле. Когда ротор синхронных двигателей без возбуждения вращается, он взаимодействует со статором. Взаимодействие между полюсами поля статора и ротором приводит к тому, что ротор становится электромагнитным с северным и южным полюсами. Ротор электродвигателей этих типов обладает высокой удерживающей способностью, что означает, что он обладает высокой способностью удерживать или сопротивляться намагничиванию.
Как уже упоминалось, существует три типа синхронных двигателей без возбуждения, а именно синхронные двигатели с постоянным магнитом, реактивные и гистерезисные синхронные двигатели. Давайте обсудим их далее.
Постоянный магнит
В синхронных типах электродвигателей с постоянными магнитами стальной ротор прикреплен к постоянному магниту, например неодимовому магниту, который обеспечивает непрерывное непрерывное магнитное поле. Это реализуется посредством взаимодействия ротора с вращающимся полем, создаваемым статором, к которому подключен источник переменного тока.Постоянная часть ротора привязана к вращающемуся полю статора, что обеспечивает синхронную скорость вращения ротора. Эта конструкция похожа на бесщеточные двигатели постоянного тока, которые будут рассмотрены позже.
Для запуска этих типов электродвигателей необходим источник переменной частоты, поскольку ротор для этой конструкции представляет собой постоянный магнит, создающий постоянное магнитное поле. Управление скоростью осуществляется с использованием прямого управления крутящим моментом и управления с ориентацией на поле.
Сопротивление
Ротор для реактивных синхронных электродвигателей, не имеющих обмоток, изготовлен из ферромагнитного материала, на котором индуцируются непостоянные магнитные полюса. Причина названия в том, что он генерирует крутящий момент, используя магнитное сопротивление, то есть которое является мерой сопротивления или сопротивления материала магнитному потоку.
Изображение предоставлено ABB GroupЧисло полюсов ротора реактивных синхронных двигателей равно числу полюсов статора.Число полюсов всегда четное и обычно равно четырем или шести. Однако количество полюсов ротора меньше количества полюсов статора, чтобы предотвратить колебания крутящего момента. Пульсация крутящего момента — это периодическое увеличение и уменьшение крутящего момента, создаваемого валом двигателя, что не очень хорошо.
Когда ротор статора находится под напряжением, на ротор действует крутящий момент в направлении уменьшения магнитного сопротивления. Этот крутящий момент будет тянуть ближайший к ротору усилие, так что он будет выровнен с полем статора в положение с меньшим сопротивлением.Следовательно, чтобы поддерживать вращение, полюс статора должен постоянно выходить из полюса ротора, вращаясь впереди полюсов ротора.
Гистерезис
В синхронных двигателях с гистерезисом при вращении магнитного поля статора на ротор действует реверсивное магнитное поле. Причина этого явления в том, что цилиндрический ротор этих типов электродвигателей изготовлен из материала с высокой коэрцитивной силой. Это означает, что как только ротор намагничен в каком-то направлении, вы не сможете легко изменить его направление, не применяя большое обратное магнитное поле.
Изображение из ElprocusОбратное магнитное поле, испытываемое каждым небольшим объемом ротора из-за вращения магнитного поля статора, будет продолжаться до тех пор, пока не будет достигнута синхронная скорость. Это дает нам преимущество синхронных двигателей с гистерезисом, которые могут создавать постоянный крутящий момент до достижения синхронной скорости без пульсаций крутящего момента. Еще один момент, связанный с этими типами двигателей, заключается в том, что, несмотря на то, что обычно имеется короткозамкнутая обмотка для запуска двигателя, двигатель может запускаться самостоятельно из-за того, что движение ротора зависит только от фазовой задержки между статором и магнитным ротором. поля.
Синхронные двигатели с возбуждением постоянным током
Ротор этих типов электродвигателей возбуждается с помощью внешнего источника постоянного тока, который создает магнитный поток, необходимый для приведения ротора в движение. Это можно сделать с помощью отдельного источника постоянного тока или источника, напрямую подключенного к валу двигателя.
Вы можете посмотреть видео здесь, чтобы увидеть, как работают синхронные двигатели.
Линейные
Линейные двигатели — это один из типов электродвигателей переменного тока, создающих линейную силу вместо крутящего момента.Они похожи на те, что уже обсуждались ранее, за исключением того, что их роторы и статоры развернуты. Они широко используются в таких приложениях, как электропоезда, приводы, используемые в раздвижных дверях и т. Д.
Это видео покажет вам, как работают такие двигатели.
Двигатели постоянного тока
В электродвигателях постоянного тока электрическая энергия постоянного тока преобразуется в механическую. Двигатели постоянного тока могут быть с самовозбуждением или с независимым возбуждением. Однако двигатели постоянного тока с самовозбуждением, вероятно, более интересны, если вы можете использовать их в своих приложениях.
Двигатели постоянного тока также можно классифицировать в зависимости от того, являются ли они щеточными двигателями постоянного тока (BDC) или бесщеточными двигателями постоянного тока (BLDC). Щеточные двигатели постоянного тока дешевы и просты в разработке и производстве; однако двигатели BLDC сложны и дороги. В общем, небольшие и малочувствительные приложения, такие как электроприборы и автомобильные электрические стеклоподъемники и сиденья, могут использовать двигатели BDC, тогда как приложения, такие как HVAC и охлаждение, автомобильные электродвигатели и другие подобные промышленные системы, будут работать с BLDC.
Щеточный DC
Щеточные электродвигатели постоянного тока имеют внутреннюю коммутацию, что означает, что крутящий момент создается непосредственно из мощности постоянного тока, подаваемой с помощью стационарных постоянных магнитов или электромагнитов и вращающихся электромагнитов.
Достаточно недорогие и очень надежные. Вы можете легко контролировать их скорость, используя простую двухпроводную систему, хотя есть некоторые конструкции с фиксированной скоростью, для которых нет управления скоростью.
У щеточных электродвигателей постоянного тока также могут быть некоторые недостатки, такие как необходимость периодического технического обслуживания, конкретно обусловленного щетками, и малый срок службы для сложных работ, для которых высоки крутящий момент или скорость. Другой важной проблемой является их ограниченная скорость из-за щеток и генерации электромагнитных помех (EMI) из-за искрения щеток.
Изображение с ZGC MotorШунтирующая обмотка
Катушки возбуждения или обмотки электродвигателей постоянного тока с шунтирующей обмоткой и щеткой подключены параллельно якорю; отсюда и название этих типов электродвигателей. В этой конфигурации обмоток подаваемый ток будет распределяться между шунтирующим якорем и обмотками возбуждения. С двигателями BDC с параллельной обмоткой регулировать скорость очень просто.
Когда нагрузка прикладывается к электродвигателям постоянного тока с шунтирующей обмоткой и щеточным электродам, скорость имеет тенденцию к снижению, но в этой ситуации сетевое напряжение будет увеличиваться.Когда сетевое напряжение увеличивается, ток якоря увеличивается, а это означает, что будет генерироваться некоторый дополнительный крутящий момент, который компенсирует снижение скорости из-за приложения нагрузки, что делает эти типы электродвигателей устройствами с постоянной скоростью.
Все это означает, что вы, вероятно, захотите рассмотреть такой двигатель, если бы у вас были низкие требования к пусковому крутящему моменту, а также хорошее регулирование скорости.
Последовательная обмотка
Если вместо параллельного соединения обмоток якоря и обмоток возбуждения последовательно, а не параллельно, получится щеточный электродвигатель постоянного тока с последовательной обмоткой.Понятно, что ток в обмотках возбуждения и якоря для этой конструкции будет одинаковым. Им потребуется значительный ток, но крутящий момент, который они создают, очень высок, особенно при запуске.
Однако эта конструкция не очень хороша с регулированием скорости. Причина в том, что, несмотря на повышенное напряжение из-за нагрузки, двигатель будет увеличивать ток для нарастания, но магнитное поле в конечном итоге будет насыщено, что означает, что магнитный поток между якорем и статором не будет расти достаточно быстро, что означает недостаточный крутящий момент. будет сгенерирован, чтобы вернуть скорость к предыдущим условиям.
Можно сказать, что вы могли бы рассмотреть типы электродвигателей, когда вам нужен высокий пусковой крутящий момент, но не слишком заботитесь о регулировании скорости.
Составная обмотка
Что делать, если вам нужен НМТ с высоким пусковым моментом, а также с хорошим контролем скорости? Что ж, для этого тоже есть решение: электродвигатели постоянного тока с комбинированной обмоткой и щеткой. Двигатели с комбинированной обмоткой представляют собой «гибрид» двигателей постоянного тока с шунтирующей обмоткой и щеточных двигателей с последовательной обмоткой. В этих типах электродвигателей имеется обмотка возбуждения, включенная последовательно с обмоткой якоря, и еще одна обмотка возбуждения, шунтирующая с обмоткой якоря.
Существует конфигурация с коротким шунтом и конфигурация с длинным шунтом для двигателей BDC с комбинированной обмоткой. Если бы поле шунта было только параллельно якорю, это была бы конфигурация с коротким шунтом, но если бы поле шунта было параллельно с последовательностью якоря и последовательным полем, это был бы BDF с составной обмоткой с длинным шунтом.
У вас может быть полярность шунтирующего поля, совпадающая с полярностью последовательного поля, что создает кумулятивную составную обмотку BDC. Это двигатель с высоким пусковым моментом и хорошей регулировкой скорости.У вас также может быть полярность шунтирующего поля, противоположная последовательному полю, что делает дифференциальный двигатель с составной обмоткой.
Постоянный магнит
В щеточном двигателе постоянного тока с постоянными магнитами якорь окружен постоянными магнитами, прикрепленными к внутренней поверхности цилиндрического статора этих типов электродвигателей. Магниты установлены таким образом, чтобы противоположные полюса соседних магнитов были обращены к якорю. Якорь, который является проводником с током, поэтому будет испытывать механическую силу, действующую на него со стороны магнитного поля этой системы постоянных магнитов, и будет вращаться в его направлении.
Серводвигатель
Серводвигатели на самом деле могут не относиться к одному из типов электродвигателей и, вероятно, представляют собой отдельную категорию, но поскольку в самых простых небольших из них используются двигатели с постоянным магнитом BDC вместе с системой управления с обратной связью, мы решили упомяните их и здесь. Серводвигатели — это механические устройства или приводы, которые очень удобны, когда дело доходит до точного управления положением, скоростью или ускорением. Они состоят из двигателя постоянного тока, датчика положения и контроллера.
Бесщеточный DC
Вы, наверное, заметили, что щетки и их взаимодействие с механическим коммутатором двигателей BDC являются причиной появления бесщеточных электродвигателей постоянного тока. Что ж, щетки изнашиваются и требуют обслуживания и замены, а щетки создают искры, которые опасны для мест, где есть вероятность взрыва.
Бесщеточные двигатели постоянного тока коммутируются электронно, что обеспечивает им более длительный срок службы, лучшие характеристики скорости и крутящего момента, высокую эффективность, лучший динамический отклик и более высокие изменения скорости, а также бесшумную работу.
Эти типы электродвигателей могут использоваться как для переменных нагрузок, так и для приложений с фиксированной нагрузкой, а также для приложений позиционирования, и они становятся все более популярными на рынке.
Видео, в котором сравниваются щеточные двигатели постоянного тока с бесщеточными двигателями постоянного тока и критерии выбора между ними, см. Здесь.
Заключение
Таким образом, речь шла о типах электродвигателей. Мы попытались представить простое руководство по этим типам двигателей. В настоящее время существуют разные и гибкие.Назначение двигателя — всякий раз, когда «требуется управление движением», это лучший выбор. Двигатель должен поддерживать использование и общее функционирование системы. Это отличный шанс, если вам нужно больше узнать о типах электродвигателей, не стесняйтесь зарегистрироваться в Linquip. Наши специалисты будут рады получить ваши вопросы и с энтузиазмом на них ответить.
Различные типы двигателей и их применение
При покупке двигателя часто спрашивают, какая технология лучше, переменного или постоянного тока, но на самом деле это зависит от области применения и стоимости.
Двигатели переменного тока
Двигатели переменного токаобладают высокой гибкостью по многим функциям, включая управление скоростью (VSD — приводы с регулируемой скоростью), и имеют гораздо большую установленную базу по сравнению с двигателями постоянного тока, некоторые из ключевых преимуществ:
- Низкое энергопотребление при запуске
- Контролируемое ускорение
- Регулируемая рабочая скорость
- Управляемый пусковой ток
- Регулируемый предел крутящего момента
- Снижение нарушений в ЛЭП
Текущая тенденция для VSD заключается в добавлении дополнительных функций и функций программируемого логического управления (ПЛК), которые добавляют преимущества, но требуют большего технического опыта во время обслуживания.
Щелкните здесь, чтобы увидеть пример двигателя переменного тока от RS
Типы двигателей переменного тока включают:
Синхронный
В этом типе двигателя вращение ротора синхронизировано с частотой питающего тока, а скорость остается постоянной при переменных нагрузках, поэтому он идеально подходит для привода оборудования с постоянной скоростью и используется в высокоточных устройствах позиционирования, таких как роботы. , КИПиА
Щелкните здесь, чтобы увидеть пример синхронного двигателя из RS
Индукция (асинхронная)
Этот тип двигателя использует электромагнитную индукцию из магнитного поля обмотки статора для создания электрического тока в роторе и, следовательно, крутящего момента.Это наиболее распространенный тип двигателей переменного тока, который важен для промышленности из-за их нагрузочной способности, при этом однофазные асинхронные двигатели используются в основном для небольших нагрузок, например, в бытовой технике, тогда как трехфазные асинхронные двигатели чаще используются в промышленности. приложения, включая компрессоры, насосы, конвейерные системы и подъемные механизмы.
Нажмите здесь, чтобы увидеть пример асинхронного двигателя RS
Двигатели постоянного тока
Двигатели постоянного токабыли первым широко используемым типом двигателей, и начальные затраты на системы (двигатели и привод) обычно ниже, чем на системы переменного тока для маломощных агрегатов.Однако при более высокой мощности общие затраты на техническое обслуживание увеличиваются, и это необходимо учитывать. Скорость двигателей постоянного тока можно регулировать путем изменения напряжения питания, они доступны в широком диапазоне напряжений, самые популярные типы — 12 и 24 В. Преимущества двигателя постоянного тока:
- Простая установка
- Регулировка скорости в широком диапазоне
- Быстрый запуск, остановка, реверсирование и ускорение
- Высокий пусковой крутящий момент
- Линейная кривая скорость-крутящий момент
Двигатели постоянного тока широко используются в небольших инструментах и бытовой технике, вплоть до электромобилей, подъемников и подъемников
Щелкните здесь, чтобы увидеть пример двигателей постоянного тока от RS
Два общих типа:
Матовый
Это более традиционный тип двигателя, который обычно используется в приложениях, чувствительных к стоимости, где система управления относительно проста, например, в потребительских приложениях и более простом промышленном оборудовании, эти типы двигателей можно разбить на:
- Series Wound — здесь обмотка возбуждения соединена последовательно с обмоткой ротора, а регулирование скорости осуществляется путем изменения напряжения питания, однако этот тип обеспечивает плохое управление скоростью, и по мере увеличения крутящего момента на двигателе скорость падает.Применяется в автомобилях, подъемниках, подъемниках и кранах, поскольку он имеет высокий пусковой крутящий момент.
- Шунтирующая обмотка — Этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости из-за увеличения тока двигателя. Он имеет средний уровень пускового момента при постоянной скорости, поэтому подходит для применения в токарных станках, пылесосах, конвейерах и шлифовальных машинах.
- Составная обмотка — это совокупность последовательностей и шунтов, где полярность шунтирующей обмотки такова, что она добавляется к последовательным полям.Этот тип имеет высокий пусковой крутящий момент и может плавно работать при незначительном изменении нагрузки, он используется для привода компрессоров, центробежных насосов с регулируемым напором, ротационных прессов, дисковых пил, ножниц, элеваторов и конвейеров непрерывного действия
- Постоянный магнит — Как следует из названия, вместо электромагнита используется постоянный магнит, который используется в приложениях, где требуется точное управление и низкий крутящий момент, например, в робототехнике, сервосистемах.
Бесщеточный
Бесщеточные двигатели устраняют некоторые проблемы, связанные с более распространенными щеточными двигателями (короткий срок службы для интенсивных применений), и имеют более простую механическую конструкцию (не имеют щеток).Контроллер мотора использует датчики Холла для определения положения ротора, с помощью этого контроллер может точно управлять мотором посредством тока в катушках ротора) для регулирования скорости. Преимущества этой технологии — долгий срок службы, небольшие затраты на обслуживание и высокий КПД (85-90%), тогда как недостатками являются более высокие начальные затраты и более сложные контроллеры. Эти типы двигателей обычно используются для регулирования скорости и положения в приложениях, где требуется надежность и устойчивость, таких как вентиляторы, насосы и компрессоры.
Примером бесщеточной конструкции являются шаговые двигатели, которые в основном используются для управления положением без обратной связи, от принтеров до промышленных приложений, таких как высокоскоростное оборудование для захвата и размещения.
Бесщеточные двигатели также доступны с устройством обратной связи, которое позволяет управлять скоростью, крутящим моментом и положением двигателя, а интеллектуальная электроника управляет всеми тремя, поэтому, если требуется больший крутящий момент для быстрого ускорения до определенной скорости, то подается больший ток. , они известны как бесщеточные сервомоторы.
Пример щеточного и бесщеточного двигателей постоянного тока
Типы электродвигателей — Thomson Lamination Company, Inc.
Электродвигателиможно найти во многих сферах применения, от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических приложений. Здесь мы делимся руководством, которое поможет вам лучше понять доступные варианты.
Сравнение электродвигателей и генераторов
И электродвигатели, и генераторы представляют собой электромагнитные устройства с обмоткой якоря или ротором, который вращается внутри обмотки возбуждения или статора; однако у них противоположные функции.Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях обеспечивает электрический ток для создания фиксированного магнитного поля, которое обмотка якоря использует для создания крутящего момента на валу двигателя. Различия между различными типами электродвигателей связаны с их уникальной работой, напряжением и требованиями к применению. Существует как минимум дюжина различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC).То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Матовые двигателиЩеточные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Кисти
- Коммутатор
Существует четыре основных типа щеточных двигателей, в том числе:
- Двигатели серии. Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низкой скорости, ограниченный крутящий момент на высокой скорости.
- Параллельные двигатели. Катушка возбуждения параллельна (шунтируется) ротору, благодаря чему ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличное управление скоростью, высокий / постоянный крутящий момент на низких скоростях.
- Кумулятивные составные двигатели. Этот тип сочетает в себе аспекты последовательного и закрытого типов, делая ток двигателя равным сумме последовательного и шунтирующего токов поля. Характеристики: используется в промышленности и автомобилестроении, объединяет преимущества как серийных, так и параллельных двигателей.
- Двигатели PMDC (постоянный магнит). Наиболее распространенный тип щеточных электродвигателей, электродвигатели с постоянным постоянным током, в которых для создания поля статора используются постоянные магниты. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на нижнем конце, ограниченный крутящий момент на верхнем конце.
Двигатели категории бесколлекторных не имеют коммутатора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо того, чтобы управлять магнитными полями на роторе, бесщеточные двигатели управляют магнитными полями статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и производить крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели, относящиеся к классификации двигателей переменного тока, бывают синхронными или асинхронными, в первую очередь различаются скоростью ротора относительно скорости статора. Скорость ротора относительно статора в синхронном двигателе равна, но скорость ротора меньше, чем его синхронная скорость в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, в то время как асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигательСинхронный двигатель — это машина с двойным возбуждением, то есть он имеет два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора, создавая трехфазный вращающийся магнитный поток. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора сцепляется с полем статора, двигатель становится синхронным.
Асинхронный (индукционный)В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные двигатели, подавая питание на статор без подачи питания на ротор.Асинхронные двигатели имеют конструкцию с возбуждением или с короткозамкнутым ротором. Вот некоторые примеры асинхронных асинхронных двигателей:
- Индукционные двигатели с конденсаторным пуском. Это однофазный двигатель с ротором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частым запуском и остановом.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазное питание создает магнитное поле в обмотке статора в этом двигателе, который включает в себя ротор с короткозамкнутым ротором, сделанный из листовой стали с высокой проводимостью.Это недорогие, низкие эксплуатационные расходы и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших нагнетателях и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с двойным короткозамкнутым ротором. Эти двигатели решают проблемы с низким пусковым крутящим моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.
Нажмите, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от четырех характеристик:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и монтажные позиции
Металлическая табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Номинальная мощность и скорость электродвигателя
Как номинальная мощность, так и номинальная частота вращения (об / мин) должны соответствовать требованиям к нагрузке для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 до 1 л.с.), встроенные двигатели (от 1 до 400 л.с.) и большие двигатели (от 100 до 50 000 л.с.). Номинальные значения частоты вращения включают 3600 об / мин (2 полюса), 1800 об / мин (4 полюса) и 1200 об / мин (6 полюсов).
Рама электродвигателя
Размер рамы двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность в лошадиных силах.Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, с их цифрами, относящимися к их размеру «D» или расстоянию от центра вала до центра нижней части крепления. Как правило, двухзначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.
Требования к напряжению
Напряжение, частота и фаза — все это часть требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели оснащены дисплеями с двойным напряжением, например 230/460.Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 от нормальной скорости вращения. Фаза — это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого источника питания, например трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от среды, в которой установлен двигатель.Есть две основные категории корпусов — открытые двигатели и закрытые двигатели.
Открытые двигателиПрименения для открытых двигателей включают помещения в относительно чистых и сухих помещениях, что важно, поскольку открытые кожухи двигателей обеспечивают циркуляцию воздуха через обмотки.
Закрытые двигателиЭти типы не допускают свободного воздухообмена между внешней и внутренней частью двигателя. Различия в герметичности корпуса и характеристиках охлаждения дополнительно различают двигатели закрытого типа, в том числе:
- Полностью закрытый с вентиляторным охлаждением (TEFC)
- Полностью закрытые, невентилируемые (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая промывка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, наиболее подходящий для вашего применения
Thomson Lamination Company — ведущий производитель штампованных компонентов для ламинирования двигателей, способный производить большие партии пластин ротора и статора из металлов с высокой проводимостью.
Ознакомьтесь с нашими возможностями по производству ламинации или свяжитесь с нами, чтобы узнать больше о наших решениях для ламинирования с электродвигателем.
Типы двигателей и их использование
Типы двигателей и их использованиеТипы двигателей и их использование: — Двигатели подразделяются на следующие категории:
Типы двигателей постоянного тока
- Параллельный двигатель постоянного тока
- Двигатель постоянного тока серии
- Самовозбуждающийся двигатель постоянного тока
Типы двигателей переменного тока
- Синхронный двигатель
- Асинхронный двигатель
1.Шунтирующий двигатель постоянного тока
В параллельном двигателе постоянного тока крутящий момент прямо пропорционален току. В отличие от этого, для двигателя постоянного тока с последовательной обмоткой крутящий момент увеличивается пропорционально квадрату тока якоря. Двигатель постоянного тока для обеспечения высокого пускового момента и высоких пусковых нагрузок.
Применение для двигателя постоянного тока: — Двигатель постоянного тока шунтирующего типа, обладающий саморегулирующейся способностью, этот двигатель постоянного тока идеально подходит для различных операций, где требуется точное управление. Они не обеспечивают высокий начальный крутящий момент, поэтому начальный крутящий момент небольшой.
Шунтирующий двигатель постоянного тока включает в себя станки, такие как токарные и шлифовальные станки, или промышленное применение, включая вентиляторы и компрессоры.
2. Двигатель постоянного тока
Этот двигатель аналогичен любому другому двигателю, поскольку основная функция двигателя заключается в преобразовании электрической энергии в механическую. Электродвигатель серии D.C работает по принципу электромагнитного поля, когда магнитное поле формируется приблизительно, проводник с током взаимодействует с внешним магнитным полем, таким образом, может быть создано вращательное движение.
Компоненты двигателя серии D.C: ротор, коммутатор, статор, ось, обмотка возбуждения.
3. Электродвигатель постоянного тока с самовозбуждением
Двигатель, в котором ток в обмотке возбуждения или катушках может быть запитан от самого двигателя. В самовозбуждающемся двигателе постоянного тока катушки возбуждения могут быть подключены параллельно якорю последовательно или могут быть частично соединены последовательно и частично параллельно с обмоткой якоря.
4. Синхронный двигатель
Синхронный термин происходит от скорости вращения ротора двигателя, такой же, как вращающееся магнитное поле.Эти двигатели являются двигателями с фиксированной скоростью, скорость синхронизирована по частоте. Синхронному двигателю для запуска требуется внешний источник (не самозапуск). Синхронные двигатели, обладающие уникальными характеристиками, работают при любом электрическом коэффициенте мощности. Это используется для улучшения коэффициента мощности.
Принцип синхронного двигателя: — Синхронный двигатель — это машина с двойным возбуждением, т. Е. Два электрических входа, необходимые для безопасной работы. Это обмотка статора, которая состоит из трех фаз, питающих трехфазную обмотку статора и D.C к обмотке ротора.
5. Асинхронный двигатель (типы двигателей)
Асинхронные двигатели оптимальны для однонаправленной и непрерывной работы (например, конвейерная система). Асинхронные двигатели приводятся в действие путем подключения двигателя к источнику переменного тока, что позволяет легко управлять двигателем.
Конфигурация и компоненты асинхронного двигателя
- Параллельный вал, прямоугольный сплошной вал, прямоугольные полые шестерни
- Электромагнитный разрыв доступен.
- Круглый вал (без шестерен)
- Преобразователи продаются отдельно.
Асинхронный двигатель в основном состоит из фланцевого кронштейна, статора, корпуса двигателя, выходного вала, шарикового подшипника, выводных проводов, покраски.
6. Двигатель специального назначения (типы двигателей)
Основы шагового двигателя: — Как и другой электродвигатель, шаговый двигатель, имеющий неподвижную часть (статор), вращающуюся часть (ротор), на роторе есть зубья, на которых катушки подключены, в то время как ротор является постоянным магнитом или ротором с железным сердечником с переменным магнитным сопротивлением.
Основной принцип: — возбуждая одну или несколько фаз ротора, магнитное поле образуется, когда ток течет в катушке, роторе или магнитном поле
Применение специального двигателя
Благодаря своим свойствам они используются там, где простое положение для управления и удержания позиции в том числе:
Банкомат: подъемник лотка для движения банкнот, роботизированные манипуляторы, 3D-принтеры, цифровая зеркальная фотокамера — регулировка диафрагмы / фокуса.
Общие типы электродвигателей
Электродвигатель — это электрическое устройство, преобразующее электрическую энергию в механическую. Механическая сила может использоваться для вращения вентиляторов, миксера, конвейеров или шин электромобиля. Электродвигатель — это рабочая лошадка в отрасли передачи электроэнергии.
Все двигатели обладают определенными характеристиками, поэтому мы можем классифицировать их на основе конкретных характеристик или стандартов.
Двигатели, используемые в Северной Америке, чаще всего соответствуют стандартам NEMA (Национальная ассоциация производителей электрооборудования).Обычно называемые двигателями NEMA. Практически во всем остальном мире используется метрическая версия, называемая SI или международным стандартом, известная как стандарты IEC. Часто называют двигателями IEC. NEMA использует лошадиные силы и дюймы, IEC использует миллиметры и киловатты
. Мы классифицируем 2 типа электродвигателей в зависимости от источника питания:- Двигатели постоянного или постоянного тока
- Двигатели переменного или переменного тока
Двигатели постоянного тока Двигатели постоянного тока
были первой разновидностью двигателей, широко используемых, поскольку они могли питаться от существующих систем распределения электроэнергии постоянного тока.Они обычно снабжены постоянными магнитами в их статической части, но есть и другие, которые содержат электромагниты вместо постоянных магнитов в своем статоре. Скорость двигателя постоянного тока можно регулировать в широком диапазоне, используя либо переменное напряжение питания, либо изменяя силу тока в его обмотках возбуждения. Небольшие двигатели постоянного тока используются в игрушках, инструментах и бытовой технике.
Двигатели переменного токаПеременный ток, это означает, что ток вместо того, чтобы течь в одном направлении, движется вперед и назад, меняет направление с определенной частотой в герцах.В большинстве стран в качестве частоты переменного тока используется 50 Гц (50 Гц или 50 циклов в секунду). Лишь немногие используют 60 Гц. Стандарт в США — электричество переменного тока частотой 60 Гц.
Мы классифицируем 2 основных типа двигателей переменного тока в соответствии с фазой: Однофазный двигатель
Однофазный двигатель работает от однофазного источника питания. Они содержат два типа проводки: горячую и нейтральную. Их мощность может достигать 3 кВт.Их можно использовать в основном в домах, офисах, магазинах и небольших непромышленных компаниях, а также во многих других устройствах, таких как дрели, кондиционеры и системы открывания и закрывания гаражных ворот.
Трехфазный двигательТрехфазный двигатель работает от трехфазного источника питания. Они управляются тремя переменными токами одинаковой частоты, которые достигают максимума в переменные моменты времени. Они могут иметь мощность до 300 кВт и скорость от 900 до 3600 об / мин.Из-за высокой эффективности и низкой стоимости трехфазный двигатель переменного тока является наиболее часто используемым двигателем в промышленных приложениях.
Мы также можем классифицировать двигатели по типу корпуса. Мы расскажем об этом в другой статье.
Читайте здесь: Самые распространенные типы корпусов электродвигателей
Электричество — это наиболее экономичный способ передачи энергии на очень большие расстояния по проводам.Однако практически невозможно использовать электричество напрямую, например, для перекачивания воды, для чего требуется механическая энергия. В этом случае нам необходимо производить механическую энергию из электричества так или иначе, чтобы выполнять механическую работу. По этой причине мы используем электродвигатели, которые потребляют электричество на входе и выдают механическую энергию на выходе.
Ознакомьтесь с некоторыми приложениями, в которых требуются электродвигатели:
Промышленное использование — Существуют различные процессы во всех отраслях промышленности, в которых нам требуется механическая энергия от электродвигателей, например смешивание, подъем, вытягивание и т. Д.
Домашнее хозяйство — Для комфортной жизни мы полагаемся на многие электрические приборы, для которых требуются электродвигатели, такие как кондиционер, электрические вентиляторы, пылесос, водяной насос, измельчитель, миксер и т. Д.
Не стесняйтесь: Свяжитесь с нами , если у вас есть какие-либо вопросы, вам нужна дополнительная информация или если вы заинтересованы в покупке электродвигателей.
HVH Industrial Solutions является авторизованным дистрибьютором следующих производителей электродвигателей: Elektrim Motors, Aurora Motors, Worldwide Electric , Rossi . Мы тесно сотрудничаем с их инженерными командами, чтобы обеспечить превосходное обслуживание и поддержку клиентов.
Запрос цитаты
Владимир Арутюнян
Владимир Арутюнян — основатель HVH Industrial.Он имеет степень магистра машиностроения и более 10 лет опыта работы в области передачи механической энергии.
Не стесняйтесь связываться с Владом на Linkedin: https://www.linkedin.com/in/vladharut
Что такое электродвигатель? Определение и типы
Определение : Электродвигатель — это электромеханическая машина, преобразующая электрическую энергию в механическую.Другими словами, устройство, создающее вращающую силу, называется двигателем. Принцип работы электродвигателя в основном зависит от взаимодействия магнитного и электрического поля. Электродвигатели в основном подразделяются на два типа. Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока принимает переменный ток в качестве входа, тогда как двигатель постоянного тока принимает постоянный ток.
Типы электродвигателей
Классификация электродвигателя показана на рисунке ниже.
Двигатель переменного тока
Двигатель переменного тока преобразует переменный ток в механическую энергию. Он подразделяется на три типа; это асинхронный двигатель, синхронный двигатель, линейный двигатель. Подробное описание двигателя приведено ниже.
1. Асинхронный двигатель
Машина, которая никогда не работает с синхронной скоростью, называется асинхронным или асинхронным двигателем. Этот двигатель использует явление электромагнитной индукции для преобразования электроэнергии в механическую.По конструкции ротора различают два типа асинхронных двигателей. А именно асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с фазной обмоткой.
- Ротор с короткозамкнутым ротором — Двигатель, который состоит из ротора с короткозамкнутым ротором, известен как асинхронный двигатель с короткозамкнутым ротором. Ротор с короткозамкнутым ротором снижает гудение и магнитную блокировку ротора.
- Ротор с фазовой обмоткой — Этот ротор также известен как ротор с контактным кольцом, а двигатель, использующий этот тип ротора, известен как ротор с фазовой обмоткой.
По фазам асинхронный двигатель подразделяется на два типа. Это однофазный асинхронный двигатель и трехфазный асинхронный двигатель.
- Однофазный асинхронный двигатель — Машина, которая преобразует электрическую мощность однофазного переменного тока в механическую с помощью явления электромагнитной индукции, известна как однофазный асинхронный двигатель.
- T Трехфазный асинхронный двигатель — Двигатель, который преобразует трехфазную электрическую мощность переменного тока в механическую энергию, такой тип двигателя известен как трехфазный асинхронный двигатель.
2. Линейный двигатель
Двигатель, который создает линейную силу вместо силы вращения, известен как линейный двигатель. Этот двигатель имеет развернутые ротор и статор. Такой тип двигателя используется в раздвижных дверях и в приводах.
3. Синхронный двигатель
Машина, которая преобразует переменный ток в механическую энергию с желаемой частотой, известна как синхронный двигатель. В синхронном двигателе скорость двигателя синхронизирована с частотой питающего тока.
Синхронная скорость измеряется относительно вращения магнитного поля и зависит от частоты и полюсов двигателя. Синхронный двигатель подразделяется на два типа: реактивный и гистерезисный.
- Реактивный двигатель — Двигатель, процесс пуска которого аналогичен асинхронному двигателю и который работает как синхронный двигатель, известен как реактивный двигатель.
- Двигатель с гистерезисом — Двигатель с гистерезисом представляет собой тип синхронного двигателя, который имеет равномерный воздушный зазор и не имеет системы возбуждения постоянным током.Крутящий момент в двигателе создается гистерезисом и вихревым током двигателя.
Двигатель постоянного тока
Машина, преобразующая электрическую мощность постоянного тока в механическую, известна как двигатель постоянного тока. Его работа зависит от основного принципа: когда проводник с током помещается в магнитное поле, на него действует сила и возникает крутящий момент. Электродвигатели постоянного тока подразделяются на два типа: электродвигатели с самовозбуждением и электродвигатели с независимым возбуждением.
1. Двигатель с автономным возбуждением
Двигатель, в котором обмотка постоянного тока возбуждается отдельным источником постоянного тока, называется двигателем постоянного тока с отдельным возбуждением.С помощью отдельного источника обмотка якоря двигателя возбуждается и создает магнитный поток.
2. Двигатель с самовозбуждением
По подключению обмотки возбуждения двигатели постоянного тока с самовозбуждением подразделяются на три типа. Это двигатель постоянного тока с последовательной обмоткой, шунтирующий двигатель и двигатель постоянного тока с комбинированной обмоткой.
- Шунтирующий двигатель — Двигатель, в котором обмотка возбуждения расположена параллельно якорю, такой тип двигателя известен как параллельный двигатель.
- Двигатель серии — В этом двигателе обмотка возбуждения соединена последовательно с якорем двигателя.
- Двигатель с комбинированной обмоткой — Двигатель постоянного тока, который имеет как параллельное, так и последовательное соединение обмотки возбуждения, известен как комбинированный ротор. Электродвигатели с комбинированной обмоткой подразделяются на электродвигатели с коротким шунтом и электродвигатели с длинным шунтом.
- Короткий шунтирующий двигатель — Если обмотка шунтирующего возбуждения параллельна только якорю двигателя, а не последовательному полю, то это известно как короткое шунтирующее соединение двигателя.