Чем регулировать обороты электродвигателя 220в
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 – s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 – 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
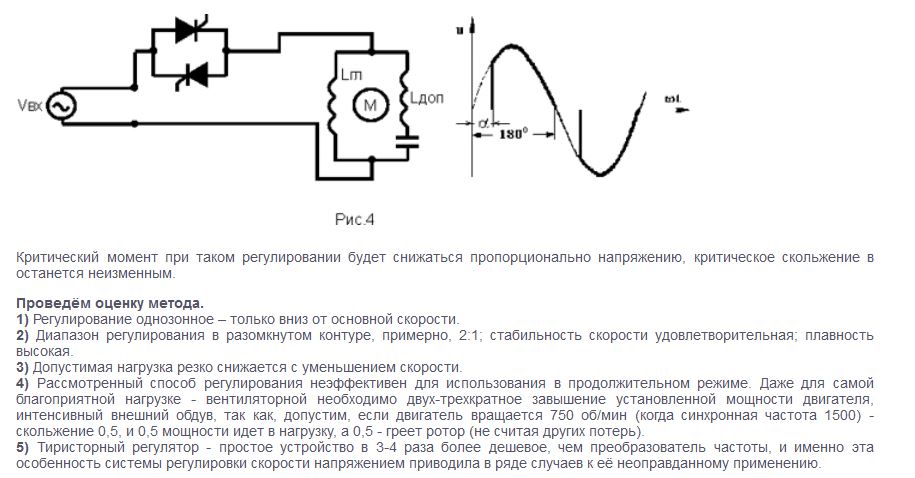
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения – асинхронный двигатель (ТРН – АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения – электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 – 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а – с одинарной звезды на двойную; б – с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
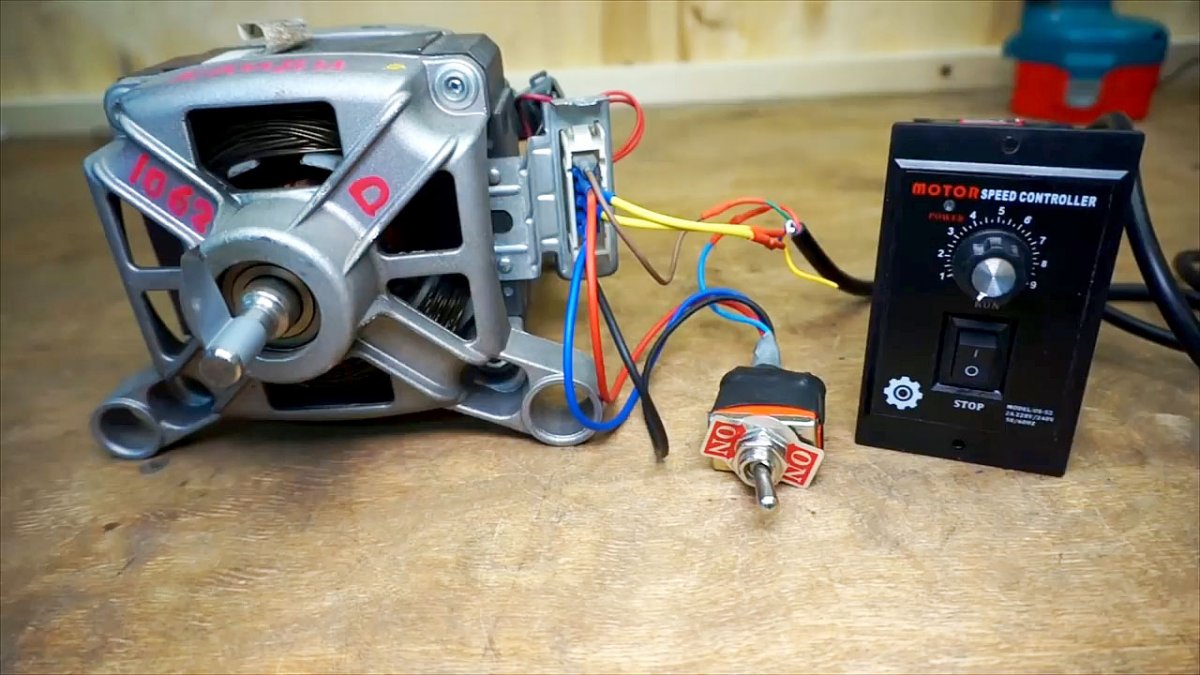
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.

Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.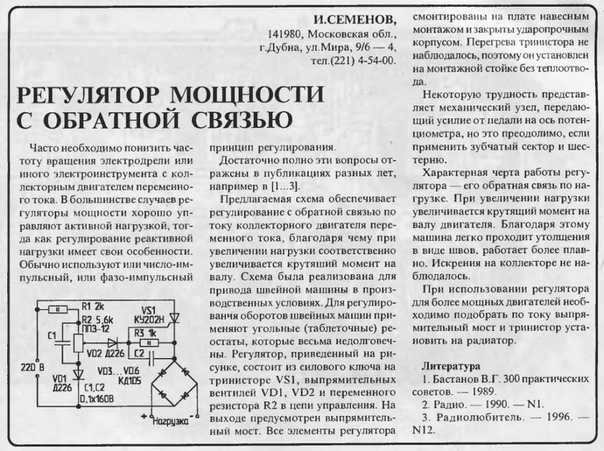
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
 Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения.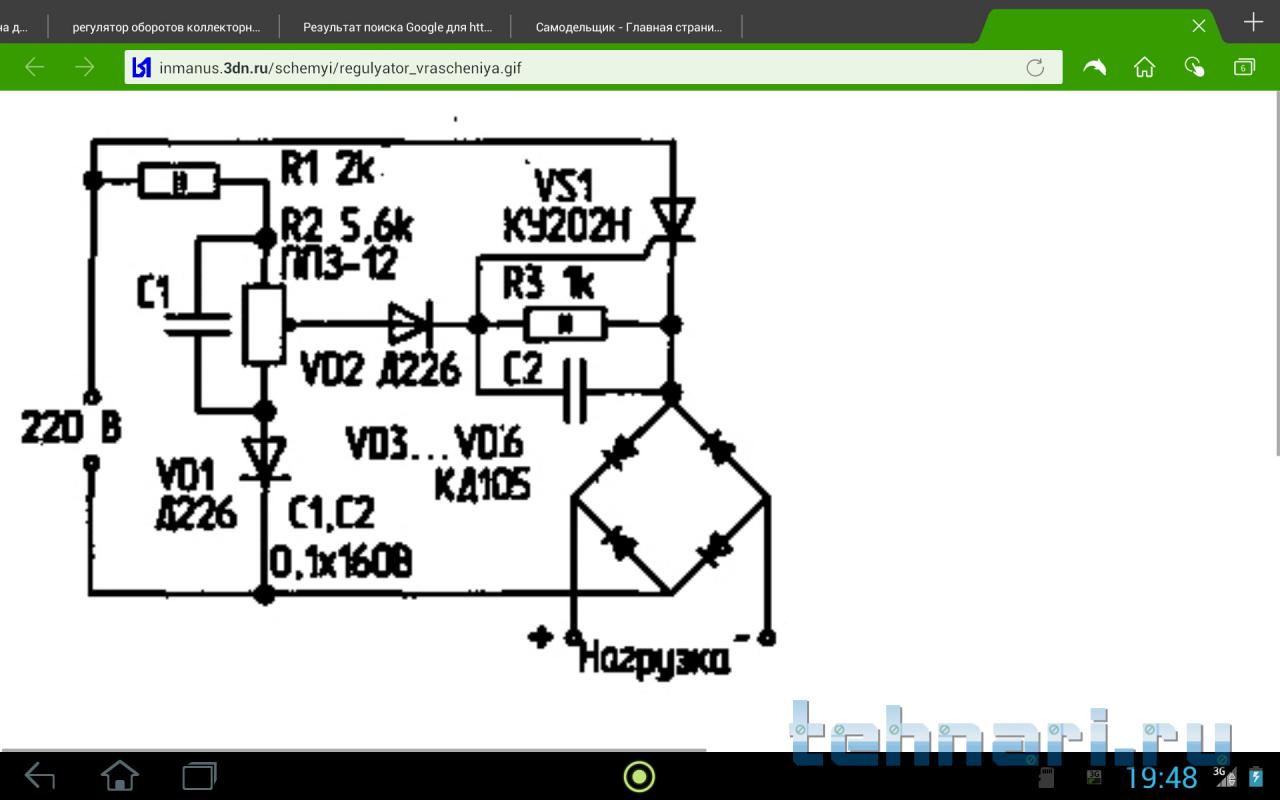 Это частотный преобразователь для бесколлекторных двигателей.
Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности.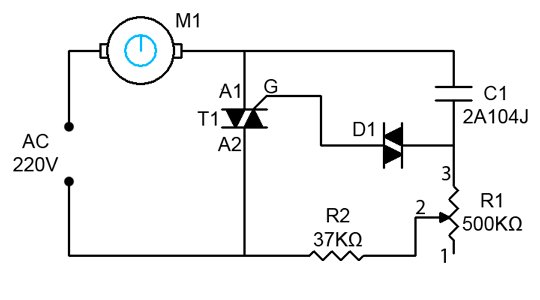 Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
 Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Совершать работу такое устройство способно как от постоянного тока, так и от переменного.Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер.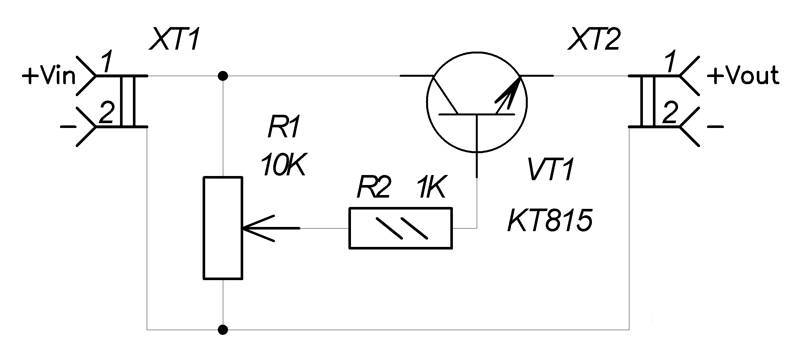 Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
 При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор.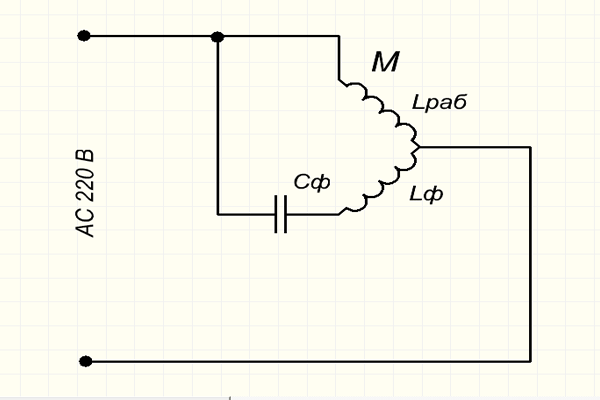 При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
 youtube.com/embed/DMilSM—rMg»/>
youtube.com/embed/DMilSM—rMg»/>
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
“>
|
С вопросом регулировки оборотов приходится сталкиваться при работе с электроинструментом, приводом швейных машин и прочих приборов в быту и на производстве Регулировать обороты, просто понижая питающее напряжение, не имеет смысла — электродвигатель резко уменьшает обороты, теряет мощность и останавливается Оптимальным вариантом регулировки оборотов является регулирование напряжения с обратной связью по току нагрузки двигателя
В большинстве случаев в электроинструменте и других приборах применены универсальные коллекторные электродвигатели с последовательным возбуждением. Рассмотрим процессы, протекающие в режиме регулирования с ОС, на примере универсальной схемы (рис 1). Резистивно-емкостная цепь R2-R3-C2 обеспечивает формирование опорного напряжения, определяющего скорость вращения электродвигателя.
При увеличении нагрузки скорость вращения электродвигателя падает, снижается и его крутящий момент.
Литература И.СЕМЕНОВ |
 Они хорошо работают как на переменном, так и на постоянном токе. Особенностью работы коллекторного электродвигателя является то, что при коммутации обмоток якоря на ламелях коллектора во время размыкания возникают импульсы противо-ЭДС самоиндукции. Они равны питающим по амплитуде, но противоположны им по фазе. Угол смещения противо-ЭДС определяется внешними характеристиками электродвигателя, его нагрузкой и другими факторами. Вредное влияние противо-ЭДС выражается в искрении на коллекторе, потере мощности двигателя, дополнительном нагреве обмоток. Некоторая часть противо-ЭДС гасится конденсаторами, шунтирующими щеточный узел.
Они хорошо работают как на переменном, так и на постоянном токе. Особенностью работы коллекторного электродвигателя является то, что при коммутации обмоток якоря на ламелях коллектора во время размыкания возникают импульсы противо-ЭДС самоиндукции. Они равны питающим по амплитуде, но противоположны им по фазе. Угол смещения противо-ЭДС определяется внешними характеристиками электродвигателя, его нагрузкой и другими факторами. Вредное влияние противо-ЭДС выражается в искрении на коллекторе, потере мощности двигателя, дополнительном нагреве обмоток. Некоторая часть противо-ЭДС гасится конденсаторами, шунтирующими щеточный узел.
 Противо-ЭДС, возникающая на электродвигателе и приложенная между катодом тиристора VS1 и его управляющим электродом, уменьшается. Вследствие этого напряжение на управляющем электроде тиристора возрастает пропорционально уменьшению противо-ЭДС. Дополнительное напряжение на управляющем электроде тиристора заставляет его включаться при меньшем фазовом угле (угле отсечки) и пропускать на электродвигатель больший ток, компенсируя тем самым снижение скорости вращения под нагрузкой. Существует как бы баланс импульсного напряжения на управляющем электроде тиристора, составленного из напряжения питания и напряжения самоиндукции двигателя. Переключатель SA1 позволяет при необходимости перейти на питание полным напряжением, без регулировки Особое внимание следует уделить подбору тиристора по минимальному току включения, что обеспечит лучшую стабилизацию скорости вращения электродвигателя
Противо-ЭДС, возникающая на электродвигателе и приложенная между катодом тиристора VS1 и его управляющим электродом, уменьшается. Вследствие этого напряжение на управляющем электроде тиристора возрастает пропорционально уменьшению противо-ЭДС. Дополнительное напряжение на управляющем электроде тиристора заставляет его включаться при меньшем фазовом угле (угле отсечки) и пропускать на электродвигатель больший ток, компенсируя тем самым снижение скорости вращения под нагрузкой. Существует как бы баланс импульсного напряжения на управляющем электроде тиристора, составленного из напряжения питания и напряжения самоиндукции двигателя. Переключатель SA1 позволяет при необходимости перейти на питание полным напряжением, без регулировки Особое внимание следует уделить подбору тиристора по минимальному току включения, что обеспечит лучшую стабилизацию скорости вращения электродвигателя
 Лампа накаливания во внешней цепи предохраняет и сигнализирует о коротком замыкании на линии, ограничивая при этом выходной ток.
Лампа накаливания во внешней цепи предохраняет и сигнализирует о коротком замыкании на линии, ограничивая при этом выходной ток.
 Номинал резистора R5 зависит от типа электродвигателя и желаемой глубины обратной связи. Его величина подсчитывается по формуле R5=2/Iм, где Iм — эффективное значение максимального тока нагрузки для данного электродвигателя Предлагаемые схемы хорошо повторяемы, но требуют подбора некоторых элементов в зависимости от характеристик применяемого двигателя (практически невозможно найти подобные по всем параметрам электродвигатели даже в пределах одной серии).
Номинал резистора R5 зависит от типа электродвигателя и желаемой глубины обратной связи. Его величина подсчитывается по формуле R5=2/Iм, где Iм — эффективное значение максимального тока нагрузки для данного электродвигателя Предлагаемые схемы хорошо повторяемы, но требуют подбора некоторых элементов в зависимости от характеристик применяемого двигателя (практически невозможно найти подобные по всем параметрам электродвигатели даже в пределах одной серии).
Как понизить обороты электродвигателя 380в
Электрика своими руками
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).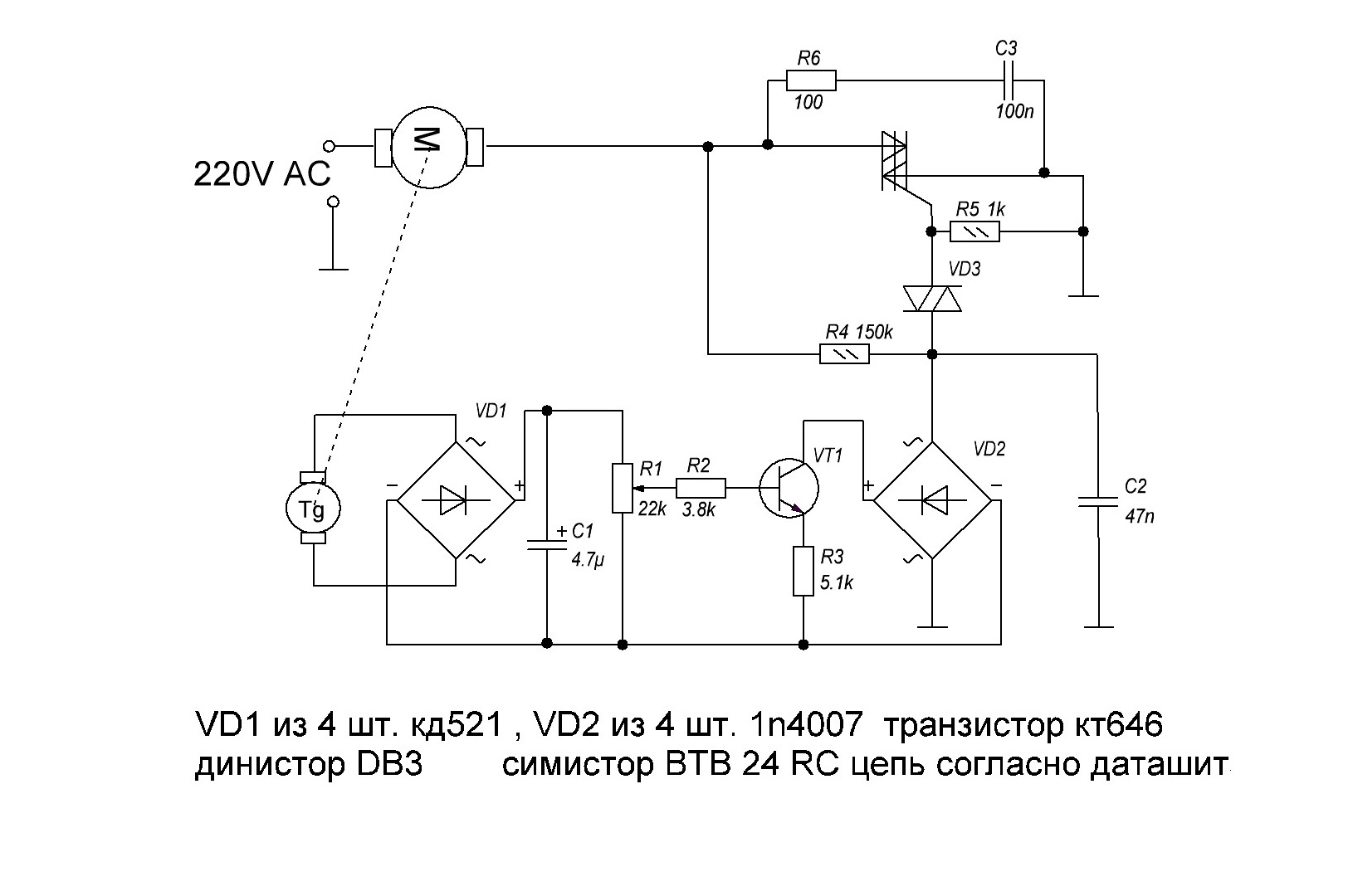
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
 Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки.
 В двигателях бытовых устройств таких приспособлений нет.
В двигателях бытовых устройств таких приспособлений нет.Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.

Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту.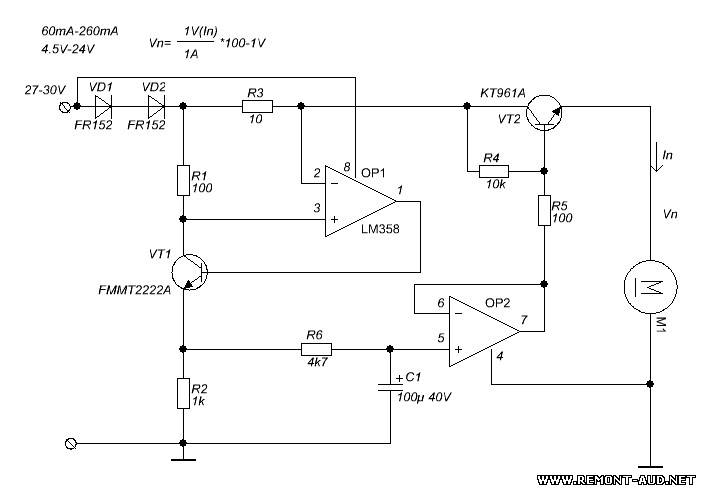 При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.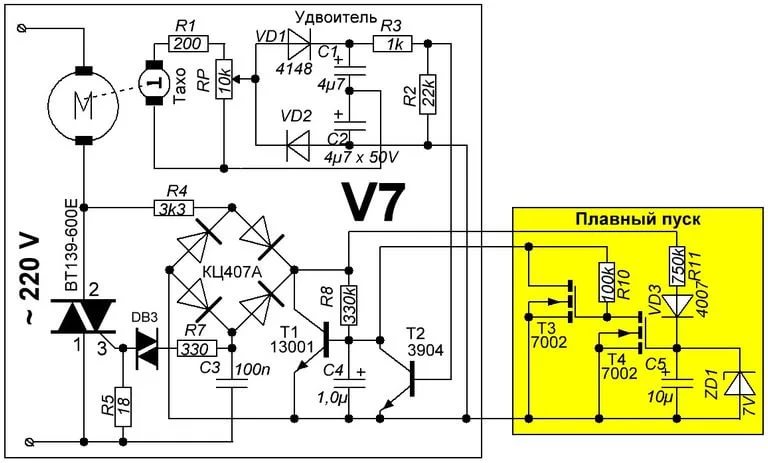
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).

Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.

Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту.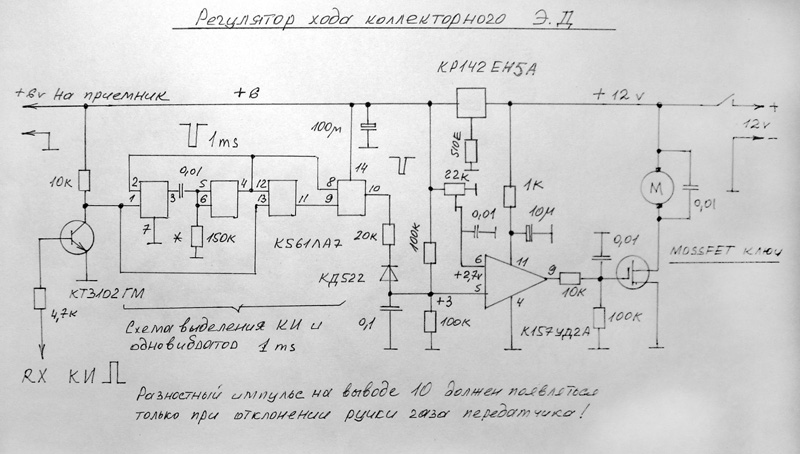 При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.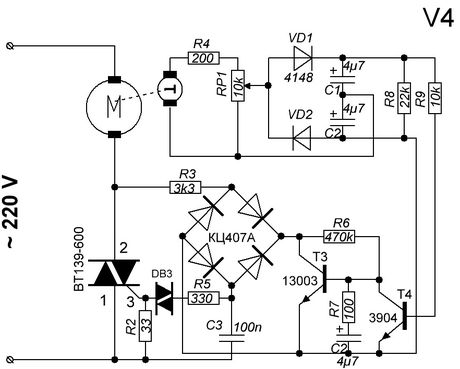 Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Плавная регулировка оборотов электродвигателя 220в переменного тока. Регулятор оборотов двигателя электроинструмента
Не каждая современная дрель или болгарка оснащена заводским регулятором оборотов, и чаще всего регулировка оборотов не предусмотрена вовсе. Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных.
Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных.
В данной статье мы рассмотрим схему и принцип работы простейшего регулятора оборотов двигателя электроинструмента, и единственное условие — двигатель должен быть коллекторным — с характерными ламелями на роторе и щетками (которые порой искрят).
Приведенная схема содержит минимум деталей, и подойдет для электроинструмента мощностью до 1,8 кВт и выше, для дрели или болгарки. Похожая схема используется для регулировки оборотов в автоматических стиральных машинах, в которых стоят коллекторные высокоскоростные двигатели, а также в диммерах для ламп накаливания. Подобные схемы, в принципе, позволят регулировать температуру нагрева жала паяльника, электрического обогревателя на базе ТЭНов и т. д.
Потребуются следующие радиоэлектронные компоненты:
Резистор постоянный R1 — 6,8 кОм, 5 Вт.
Переменный резистор R2 — 2,2 кОм, 2 Вт.
Резистор постоянный R3 — 51 Ом, 0,125 Вт.
Конденсатор пленочный C1 — 2 мкф 400 В.
Конденсатор пленочный C2 — 0,047 мкф 400 вольт.
Диоды VD1 и VD2 — на напряжение до 400 В, на ток до 1 А.
Тиристор VT1 — на необходимый ток, на обратное напряжение не менее 400 вольт.
В основе схемы — тиристор. Тиристор представляет собой полупроводниковый элемент с тремя выводами: анод, катод, и управляющий электрод. После подачи на управляющий электрод тиристора короткого импульса положительной полярности, тиристор превращается в диод, и начинает проводить ток до тех пор, пока в его цепи этот ток не прервется или не сменит направление.
После прекращения тока или при смене его направления, тиристор закроется и перестанет проводить ток, пока не будет подан следующий короткий импульс на управляющий электрод. Ну а поскольку напряжение в бытовой сети переменное синусоидальное, то каждый период сетевой синусоиды тиристор (в составе данной схемы) станет отрабатывать строго начиная с установленного момента (в установленной фазе), и чем меньше во время каждого периода тиристор будет открыт, тем ниже будут обороты электроинструмента, а чем, соответственно, дольше тиристор будет открыт, тем выше будут обороты.
Как видите, принцип прост. Но применительно к электроинструменту с коллекторным двигателем, схема работает хитрее, и об этом мы расскажем далее.
Итак, в сеть здесь включены параллельно: измерительная цепь управления и силовая цепь. Измерительная цепь состоит из постоянного и переменного резисторов R1 и R2, из конденсатора C1, и диода VD1. Для чего нужна эта цепь? Это делитель напряжения. Напряжение с делителя, и что важно, противо-ЭДС с ротора двигателя, складываются в противофазе, и формируют импульс для открывания тиристора. Когда нагрузка постоянна, то и время открытого состояния тиристора постоянно, следовательно обороты стабилизированы и постоянны.
Как только нагрузка на инструмент, и следовательно на двигатель, увеличивается, то величина противо-ЭДС уменьшается, поскольку обороты снижаются, значит сигнал на управляющий электрод тиристора возрастает, и открывание происходит с меньшей задержкой, то есть мощность подводимая к двигателю возрастает, увеличивая упавшие обороты. Так обороты сохраняются постоянными даже под нагрузкой.
Так обороты сохраняются постоянными даже под нагрузкой.
В результате совместного действия сигналов от противо-ЭДС и с резистивного делителя, нагрузка не сильно влияет на обороты, а без регулятора это влияние было бы существенным. Таким образом при помощи данной схемы достижима устойчивая регулировка оборотов в каждом положительном полупериоде сетевой синусоиды. При средних и малых скоростях вращения этот эффект более выражен.
Однако, при повышении оборотов, то есть при повышении напряжения, снимаемого с переменного резистора R2, стабильность поддержания скорости постоянной снижается.
Лучше на этот случай предусмотреть шунтирующую кнопку SA1 параллельно тиристору. Функция диодов VD1 и VD2 — обеспечение однополупериодного режима работы регулятора, так как напряжения с делителя и с ротора сравниваются лишь в отсутствие тока через двигатель.
Конденсатор C1 расширяет зону регулирования на малых скоростях, а конденсатор C2 снижает чувствительность к помехам от искрения щеток. Тиристор нужен высокочувствительный, чтобы ток менее 100 мкА смог бы его открыть.
Тиристор нужен высокочувствительный, чтобы ток менее 100 мкА смог бы его открыть.
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения.
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Блок управления и регулирования скорости вращения электродвигателей изменением фазного напряжения
Существует несколько видов блоков управления, изготовленных промышленным способом. Они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
д.), при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25%, двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.
На рисунке схема подключения блока регулятора РВС 207.
Регулятор скорости асинхронного двигателя
Помимо образцов регуляторов, промышленных образцов регуляторов, существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.
На рисунке выше электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме. С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация : для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания. В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640 В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500 Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности, нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Со своих первых паек с кислотным флюсом я задумывался о вентиляторе для паяльных работ. После радиомонтажной практики (там доходчиво объяснили необходимость вытяжки при пайке любым флюсом/припоем) было принято решение: вытяжке быть! Очень вовремя под руку попался вентилятор ВН-2.
Но оказалось, что при прямом включении в сеть вентилятор очень шумит, да и тягой будущей вытяжки хотелось бы управлять. Нужен регулятор!
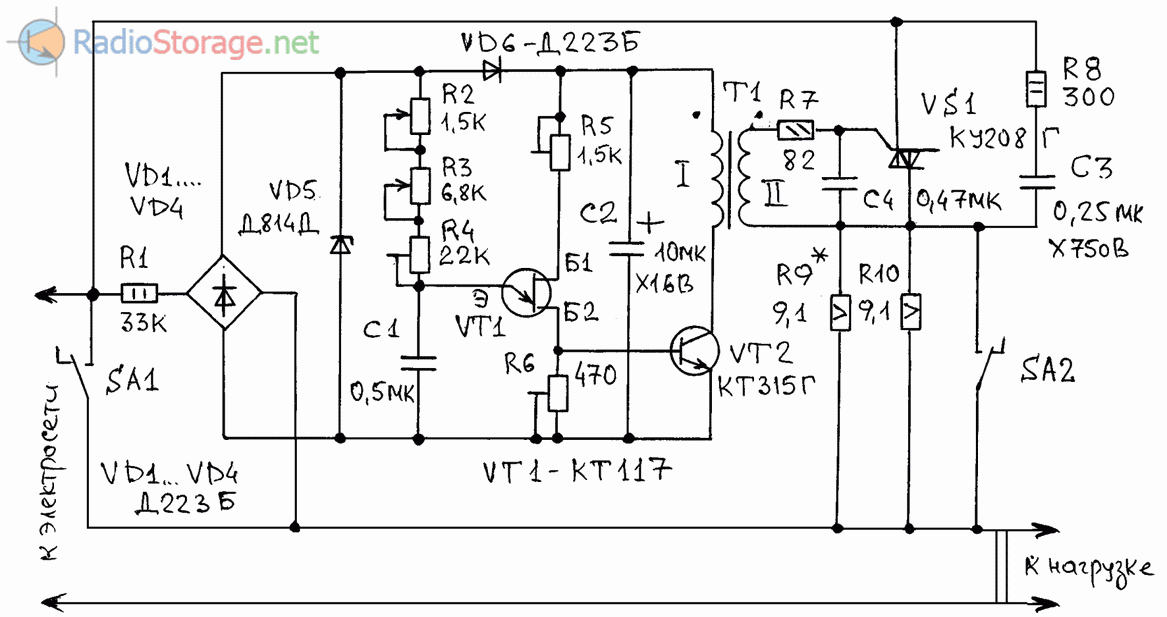
Схема регулятора оборотов однофазного асинхронного двигателя на транзисторе D209L
Немного поискав в сети, выбрал схему так называемого «беспомехового» регулятора:Собрав схему, я убедился в её пригодности для регулировки оборотов однофазного асинхронного двигателя (как в ВН-2). Но после КЗ на выходе в страну вечной охоты отправляется мой единственный КТ840 и неоновая лампочка, которую я подключил без резистора. Цены на КТ840 меня совсем не обрадовали. Решив сэкономить стипендию, я подыскал транзистор-аналог из горелого компьютерного БП — D209L. С этим транзистором схему пришлось немного изменить:
Но после КЗ на выходе в страну вечной охоты отправляется мой единственный КТ840 и неоновая лампочка, которую я подключил без резистора. Цены на КТ840 меня совсем не обрадовали. Решив сэкономить стипендию, я подыскал транзистор-аналог из горелого компьютерного БП — D209L. С этим транзистором схему пришлось немного изменить:
Я решил добавить немного индикации, и поставил по светодиоду на вход и выход регулятора. Новую схему сначала тоже протестировал на навесном монтаже, а потом решил собирать в нормальном корпусе, который и приобрёл на радиорынке:
Сразу озаботился радиатором для транзистора. Радиатор пришлось немного подогнать с помощью ножовки и напильника:
Для крепления радиатора к корпусу применил самодельные винты М3 с широкой шляпкой (припаял по шайбе к винту):
Вот так это все будет выглядеть снаружи:
Теперь органы управления:
Примеряемся:
Сверлим отверстия и вставляем детали:
С диаметром отверстий для светодиодов немного промахнулся, пришлось упаковать в прозрачную термоусадку:
P.
 S.: прозрачная термоусадка — самая лучшая из всех, что я видел на киевском радиорынке, она при усаживании не вспучивается и не подгорает, а при соединении двух слоёв они сплавляются, и получается монолитная трубка.
S.: прозрачная термоусадка — самая лучшая из всех, что я видел на киевском радиорынке, она при усаживании не вспучивается и не подгорает, а при соединении двух слоёв они сплавляются, и получается монолитная трубка.Трансформатор
Применил малогабаритный 220/6 Вольт, 100мА. Его я тоже «упаковал» в жестяной каркас для удобства установки. Материалом для каркаса послужил корпус старого CD-Rom и проволока от шампанского (по-научному — мюзле).Печатная плата
Для изготовления платы сначала вырезал из картона шаблон, чтобы не ошибиться в размерах и не подгонять потом готовую плату напильником:По шаблону вырезаю ножницами по металлу плату из текстолита:
Плату рисую вручную цапонлаком по трафарету, предварительно нанеся точки в местах будущих отверстий самодельным кернером из фрезы.
Сами дорожки рисовал с помощью «рейсфедера» из вытянутого пипеткой стержня от ручки, очень удобно (не ломается, как стеклянная пипетка). Готовые дорожки «запекаю» газовой горелкой: экспериментально установил, что мой цапонлак от такой шоковой сушки становится вообще «дубовым», что подходит для моей методики травления, о которой ниже.
 Процесс «обжига»:
Процесс «обжига»:Важно : если во время «обжига» на меди будут отпечатки пальцев/грязь, то они останутся и на вытравленной плате. Поэтому чистый текстолит я заклеиваю скотчем на время резки/кернения и отклеиваю его только когда рисую дорожки.
Травление
Недавно открыл для себя просто фантастический метод травления плат: лимонной кислотой!Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 5 г поваренной соли. Этого раствора должно хватить для травления 100 см2 меди, толщиной 35мкм.
Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора, то в процессе травления практически не расходуется. Перекись 3% не стоит разбавлять дополнительно т.к. при добавлении остальных ингредиентов её концентрация снижается.
Чем больше будет добавлено перекиси водорода (гидроперита) тем быстрее пойдёт процесс, но не переусердствуйте — раствор не хранится, т. е. повторно не используется, а значит и гидроперит будет просто перерасходован. Избыток перекиси легко определить по обильному «пузырению» во время травления.
е. повторно не используется, а значит и гидроперит будет просто перерасходован. Избыток перекиси легко определить по обильному «пузырению» во время травления.
Однако добавление лимонной кислоты и перекиси вполне допустимо, но рациональнее приготовить свежий раствор.
Свою плату я вытравил примерно за 12 минут!
Дальше все без «самодеятельности»:
Окончательная сборка регулятора
Детали вне платы «получают» провода в термоусадке, некоторые из этих деталей приходится припаивать со стороны дорожек.Данный регулятор оборотов электродвигателя 220в позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема тиристорного регулятора оборотов , как раз разработана для изменения частоты вращения коллекторных электродвигателей (электродрель, фрезер, вентилятор ). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт .
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
 Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.

Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.

Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.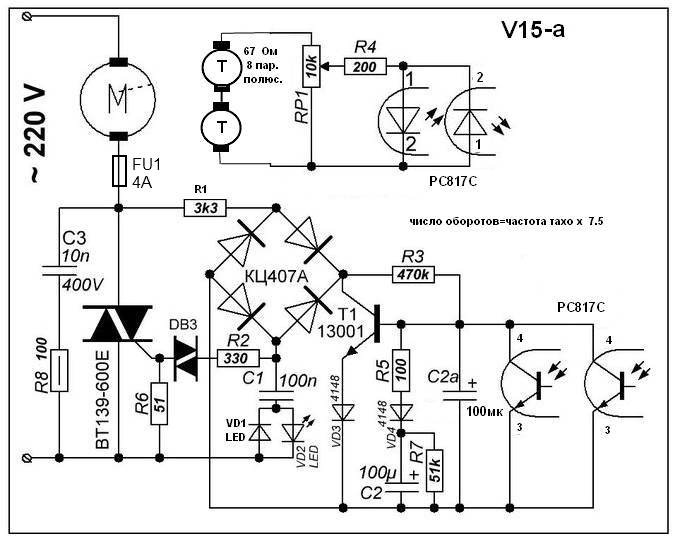
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Советы по изготовлению регулятора частоты вращения электродвигателя
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
 Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах.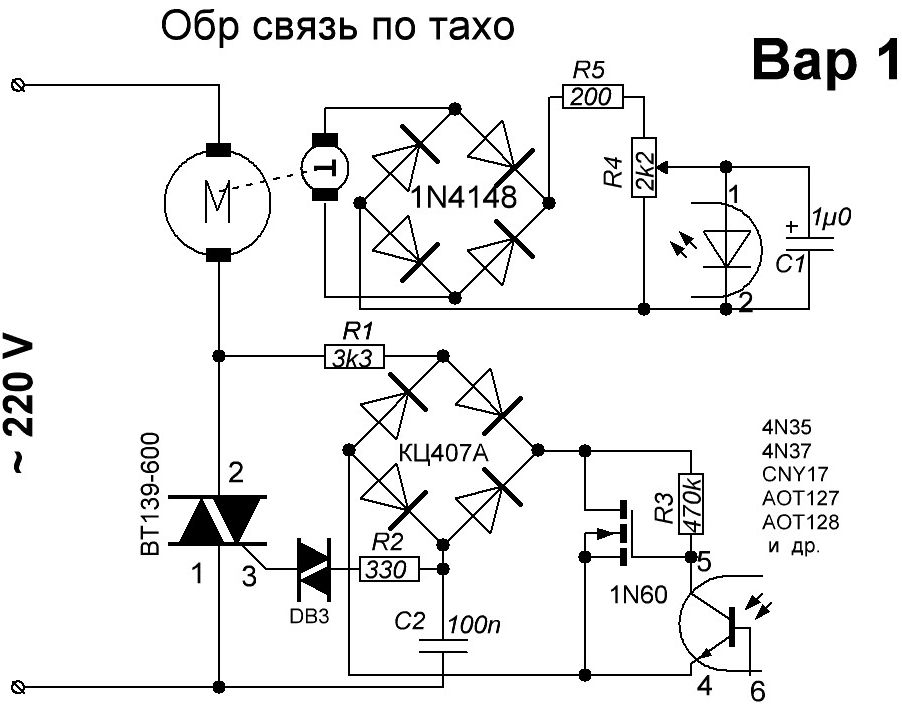 Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.

Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств.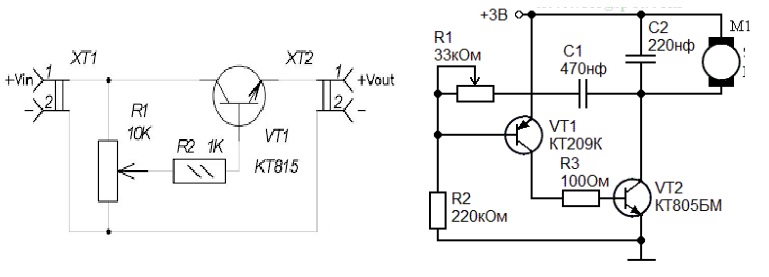 Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки.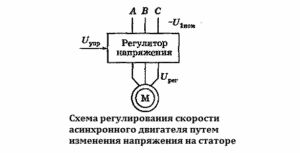 Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.

В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.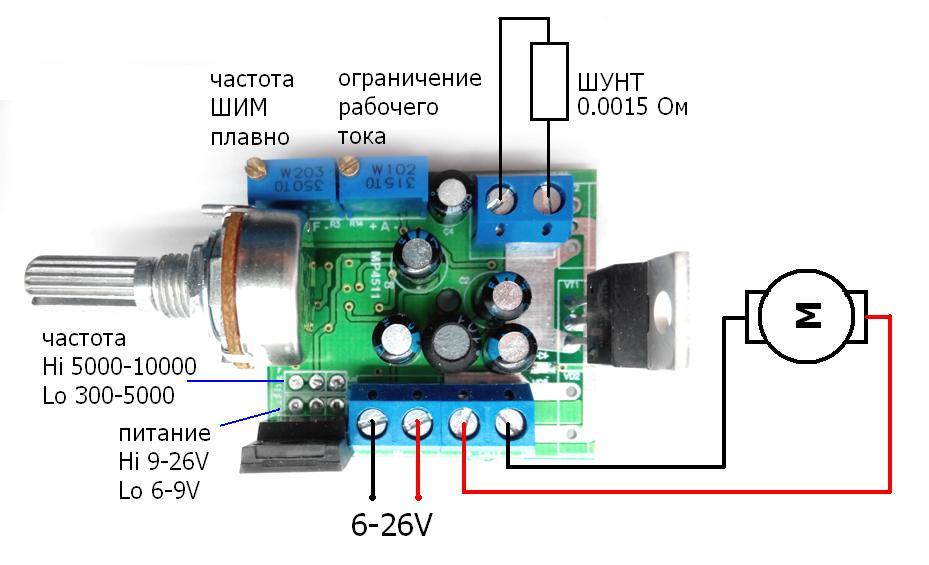
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Как увеличить обороты электродвигателя — Евразийская Электротехническая Компания
Регулировка оборотов электродвигателя, в сторону увеличения, возможна, в пределах расчетной мощности двигателя.
Перед тем, как увеличить обороты электродвигателя, важно определить его тип:
- Коллекторный;
- Асинхронный;
- Синхронный;
- С электронным управлением.
Также, имеет значение область применения и условия эксплуатации агрегата. Все существующие способы сводятся к модификации параметров питания или изменении нагрузки на вал двигателя. Правило, справедливое для всех типов двигателей — увеличение числа оборотов должно осуществляться исключительно в рамках допустимых, для данной модели, значений.
Коллекторный электродвигатель
Повышение числа оборотов данного типа двигателя, достигается путем увеличения напряжения питания или уменьшения нагрузки на вал. В некоторых случаях, допустимо применение шунтирования обмотки, однако такой способ нередко приводит к перегреву аппарата. Перед тем, как повысить обороты электродвигателя коллекторного типа, следует учесть, что они имеют свойство разгоняться до скоростей недопустимо высоких, при работе без нагрузки. Особенно это касается агрегатов с последовательным возбуждением.
Особенно это касается агрегатов с последовательным возбуждением.
Асинхронный электродвигатель
Как увеличить обороты электродвигателя асинхронного типа? Как и в предыдущем варианте, приемлем метод увеличения напряжения питания. Однако эффективность данного способа не велика, учитывая нелинейность зависимости скорости и напряжения. При этом, существенно изменяется значение КПД. Более действенный способ — использование трехфазного инвертора. С его помощью можно изменять частоту вращения, путем уменьшения частоты. Существуют инверторы для однофазных и для двухфазных двигателей.
Для эффективной работы двигателя, без потерь, нужно изменять не только частоту, но и подаваемое напряжение. Выбирая инвертор, следует обратить внимание на модель, которая обеспечит не только уменьшение частоты, но и создаст условия для понижения напряжения. Таким образом, буде учитываться снижение индуктивное сопротивление обмоток.
Синхронный электродвигатель
Перечисленные способы абсолютно не подходят для наращивания оборотов синхронного двигателя. В данном случае, эффективно использование трехфазного преобразователя частоты. Прибор дает возможность регулировать число оборотов как асинхронного, так и синхронного электродвигателя.
В данном случае, эффективно использование трехфазного преобразователя частоты. Прибор дает возможность регулировать число оборотов как асинхронного, так и синхронного электродвигателя.
Электродвигатель с электронным управлением
Двигатели этого типа, по своим характеристикам очень близки к коллекторным, за исключением того, что не допускают реверс методом переполюсовки. По этой причине, для увеличения оборотов двигателя с электронным управлением обмотками, применимы те же меры, что и для коллекторного. При этом, справедливы и все предостережения: риск перегрева двигателя, при шунтировании обмотки.
Как изменить скорость на электродвигателе переменного тока
Берт Маркграф Обновлено 16 марта 2018 г.
Двигатели переменного тока являются устройствами с постоянной скоростью, но их скорость может измениться, если вы измените входное напряжение или частоту или обмотки, из которых изготовлен двигатель повернуть. Наиболее распространенный и эффективный способ изменения скорости — это изменение частоты с помощью инвертора в качестве источника питания. Этот метод стал популярным с развитием и снижением стоимости силовой электроники.Способы, включающие снижение напряжения на обмотках двигателя с помощью резисторов, трансформаторов или отводов обмоток двигателя, все еще используются и являются недорогими и предпочтительными методами для определенных четко определенных приложений.
Этот метод стал популярным с развитием и снижением стоимости силовой электроники.Способы, включающие снижение напряжения на обмотках двигателя с помощью резисторов, трансформаторов или отводов обмоток двигателя, все еще используются и являются недорогими и предпочтительными методами для определенных четко определенных приложений.
Используйте инвертор для питания двигателя переменного тока. Выберите инвертор, который может подавать напряжение и ток двигателя, включая пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, которую инвертор должен обеспечивать. Органы управления инвертором будут изменять частоту, подаваемую на двигатель, и соответственно изменять скорость двигателя.
Добавьте в цепь двигателя переменное сопротивление, чтобы снизить напряжение на основной обмотке, если инвертор слишком дорог и точное управление скоростью не требуется. «Проскальзывание» двигателя, обычно близкое к нулю, будет увеличиваться по мере того, как на двигатель подается уменьшенная мощность, а полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания их нормальной скорости. Двигатель должен быть рассчитан на высокое скольжение, а его сопротивление и схема должны быть индивидуальными для конкретного применения.
Двигатель должен быть рассчитан на высокое скольжение, а его сопротивление и схема должны быть индивидуальными для конкретного применения.
Используйте трансформатор переменного напряжения для изменения напряжения, подаваемого на главную обмотку, если вы хотите более эффективное управление скоростью с высоким скольжением и пониженным напряжением. Трансформатор переменного напряжения имеет низкие потери по сравнению с переменным резистором. Трансформатор может иметь серию ответвлений, которые yolu может переключать вручную для управления скоростью двигателя, или он может иметь устройство переключения ответвлений с электроприводом. В любом случае скорость двигателя изменяется дискретно, и подробный проект снова зависит от установки, в которой он используется.
Используйте двигатель переменного тока с резьбовыми обмотками для изменения скорости, если это возможно. Такой двигатель имеет определенное количество ответвлений на основной обмотке, что позволяет ему работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и количество скоростей, доступных для конкретного двигателя, обычно не превышает четырех. Этот метод распространен для вентиляторов с низкой, средней и высокой скоростью вращения с переключателем. Точная скорость в этих устройствах не важна, а метод управления скоростью стоит недорого.
Количество отводов и количество скоростей, доступных для конкретного двигателя, обычно не превышает четырех. Этот метод распространен для вентиляторов с низкой, средней и высокой скоростью вращения с переключателем. Точная скорость в этих устройствах не важна, а метод управления скоростью стоит недорого.
Как управлять скоростью электродвигателя переменного тока
Электродвигатель переменного тока — это электродвигатель, приводимый в действие переменным током (AC), и состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля. поле, и внутренний ротор, прикрепленный к выходному валу, создающий второе вращающееся магнитное поле. Возможность управлять скоростью двигателя имеет множество преимуществ, и в этом руководстве будут рассмотрены несколько способов управления скоростью двигателя.
Как отмечалось выше, управление скоростью электродвигателя переменного тока имеет ряд преимуществ, включая снижение слышимого шума, энергоэффективность и улучшенное управление приложением двигателя.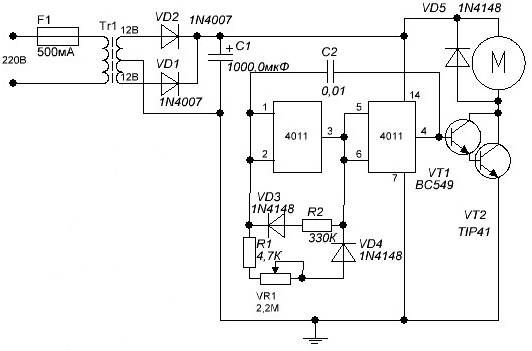 Несмотря на то, что они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Несмотря на то, что они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Распространенным и эффективным средством изменения скорости двигателя является изменение частоты с помощью инвертора в качестве источника питания.Благодаря технологическому прогрессу и снижению стоимости силовых инверторов, это часто используемый и популярный вариант. Способы снижения напряжения на обмотках двигателя с помощью трансформаторов, резисторов или отводов обмоток двигателя также все еще используются.
Если вы планируете использовать инвертор для питания электродвигателя переменного тока, важно выбрать такой, который может обеспечивать не только напряжение и рабочий ток двигателя, но и пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, которую инвертор должен обеспечивать.Элементы управления инвертора могут использоваться для изменения частоты, подаваемой на двигатель, и скорость двигателя будет соответственно изменяться.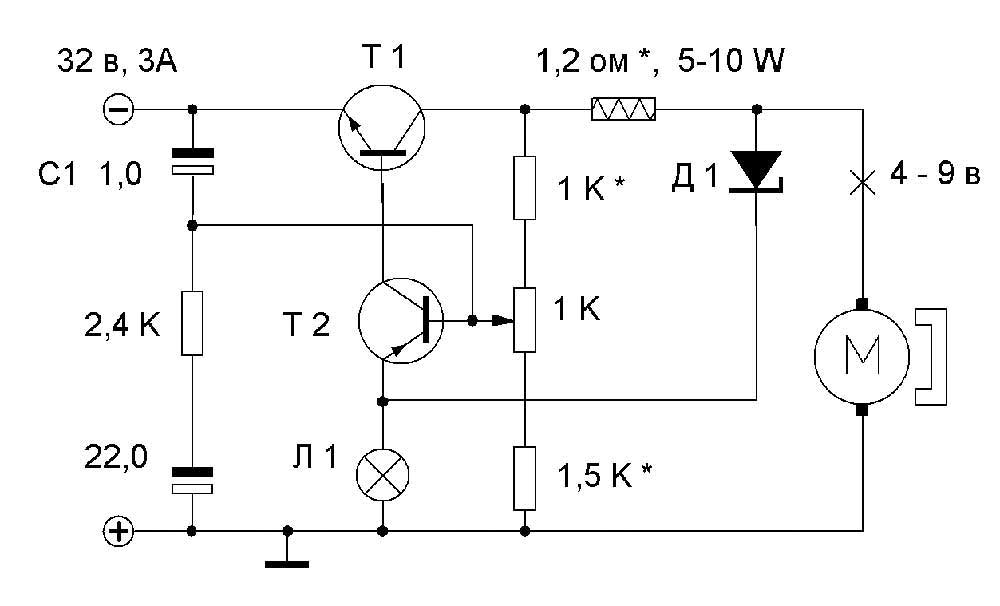
Если полностью точное регулирование скорости не критично для двигателя, можно также добавить переменное сопротивление в цепь двигателя, чтобы снизить напряжение на основной обмотке. «Пробуксовка» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала — которая обычно близка к нулю, будет увеличиваться, поскольку на двигатель подается уменьшенная мощность.Кроме того, полюса двигателя не получают достаточной мощности для создания необходимой силы для поддержания нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
Более эффективным вариантом является использование трансформатора переменного напряжения. Этот метод изменит напряжение, подаваемое на главную обмотку, что приведет к большому скольжению и уменьшению напряжения управления скоростью. Трансформатор переменного напряжения имеет низкие потери по сравнению с переменным резистором. Трансформатор может иметь серию ответвлений, которые изменяют соотношение напряжений для управления скоростью двигателя.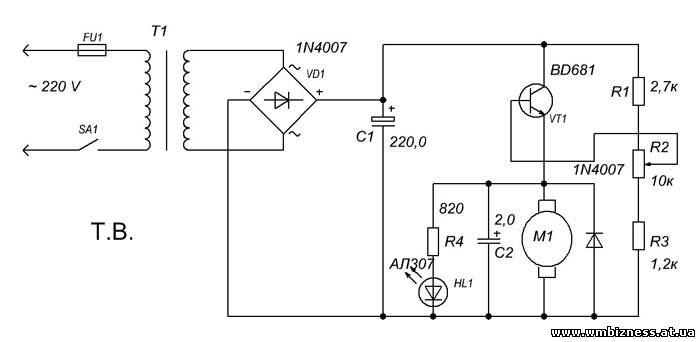 Эти ответвления можно переключать вручную, или трансформатор может иметь устройство переключения ответвлений с электроприводом. В любом случае скорость двигателя изменяется дискретно, и конкретная конструкция зависит от установки, в которой используется трансформатор.
Эти ответвления можно переключать вручную, или трансформатор может иметь устройство переключения ответвлений с электроприводом. В любом случае скорость двигателя изменяется дискретно, и конкретная конструкция зависит от установки, в которой используется трансформатор.
Другой метод управления скоростью двигателя переменного тока — использование двигателя переменного тока с ответвленными обмотками для изменения скорости. Это метод, наиболее часто встречающийся в домашних вентиляторах с переключателями высокой, средней и низкой скорости. Эти двигатели имеют заданное количество ответвлений на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю.Количество ступеней и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в этих типах приложений не имеет решающего значения, и регулирование скорости с помощью этой опции очень экономично.
Частотно-регулируемый привод (VFD) — это еще один вариант, представляющий собой контроллер двигателя переменного тока, который приводит в действие двигатель, изменяя подаваемую на него частоту и напряжение. Частота (или герц) напрямую связана со скоростью двигателя (об / мин), поэтому чем выше частота, тем выше частота вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для уменьшения частоты и напряжения в соответствии с требованиями к нагрузке двигателя.Когда требования к скорости двигателя в приложении меняются, частотно-регулируемый привод будет эффективно уменьшать или увеличивать скорость двигателя, удовлетворяя требованиям скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производства за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Наконец, регулировка величины напряжения на клеммах двигателя с помощью широтно-импульсной модуляции (ШИМ) также может управлять скоростью двигателя. Как следует из этого термина, ШИМ-регулирование скорости работает, управляя двигателем с помощью быстрой серии импульсов «ВКЛ» и «ВЫКЛ» и изменяя рабочий цикл.Мощность, подаваемая на двигатель, регулируется путем изменения ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс находится в состоянии «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
С помощью нескольких простых регулировок или изменений можно управлять скоростью электродвигателя переменного тока.Посетите Zoro.com, где представлен широкий спектр регуляторов скорости переменного тока от ведущих поставщиков.
Методы управления скоростью различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши комплекты двигателей с регулировкой скорости включают двигатель, драйвер (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости.«Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Блок инвертора», который объединяет трехфазный асинхронный двигатель с небольшой инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях.Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики. Если сосредоточить внимание на сегменте регулирования скорости на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и редукторные электродвигатели переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2. Способы регулирования скорости различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Строительство Motor
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением. Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис.3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя, и катушки статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно показать выражением (1).Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, скольжение s изменяется, а затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис. 4, на кривой «Скорость вращения — крутящий момент» существует стабильный диапазон и нестабильный диапазон.Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например N1 ~ N3 на рис. 5. Для обеспечения надежной работы даже в вышеупомянутый нестабильный диапазон, необходимо определить скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который уменьшает ошибку скорости по сравнению с установленным значением.
Рис. 4 Частота вращения — крутящий момент асинхронных двигателей
Фиг.5 Простой контроль напряжения
Доступные методы контроля напряжения включают управление трансформатором или управление фазой. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на рис.7 и 8. Регулирование скорости достигается методом фазового регулирования путем управления среднеквадратичным значением. значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения при фазовом управлении
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для электродвигателя управления скоростью переменного тока в виде блок-схемы.
Рис. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения.Затем определяется уровень сигнала напряжения , .
Сигнал напряжения и является низким, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается. Поскольку сигнал запуска выводится в точке, где треугольная волна b, пересекается с сигналом напряжения a, , определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала напряжения a, . Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается.Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует петлю Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет увеличения точности определения скорости.
Фиг.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть настроена просто потому, что схема сглаживания не требуется, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна долговечная конструкция, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение выполняется только один раз в течение каждого полупериода промышленного источника переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Двигатели с регулировкой скорости вращения электродвигателя переменного тока обычно имеют характеристики «Скорость вращения — крутящий момент», показанные на рис. 12.
Рис.12 Характеристики крутящего момента и скорости вращения
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный регулятор скорости постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (Y-разводкой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично таковой у щеточного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1.Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается к Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер).Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рис. 16 (b), с использованием шести переключающих элементов (полевых транзисторов или IGBT), показанных на рис. 16 (а).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на Рис. 16 (a), и состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (Шаг 1 ~ 12).
На рис. 17 показана блок-схема конфигурации для управления скоростью бесщеточного двигателя постоянного тока.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от ИС Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери небольшие.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, потому что он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны, получая информацию о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Этот метод обеспечивает малошумный метод привода, поскольку ток, протекающий в двигатель, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, приложенных методом синусоидального возбуждения и методом 120-градусного возбуждения
2.2.3. Характеристики
Характеристики скорости вращения и момента вращения системы бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме работы продолжается в течение пяти или более секунд, срабатывает функция защиты водителя от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, и скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл включения / выключения, как показано на рис.21. Время включения / выключения регулируется таким образом, чтобы среднее напряжение, приложенное к двигателю, приобретало форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой волны синусоидального сигнала. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и позволяет получить высокие скорости (частоту можно установить до 80 Гц.) Просто тогда, когда регулирование скорости с изменяющейся нагрузкой не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
T = K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рисунке 23.
Рис.21 Контроль напряжения / частоты
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, с использованием таблицы данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица характеристик и данных
С помощью этой таблицы характеристик и времени t обнаруженной разности фаз инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как поясняется в разделе «Двигатель, регулирующий скорость переменного тока», на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и крутящего момента для замкнутого контура управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулированием скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, наилучшим образом отвечающую различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998).
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Кадзуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Лучшие и решающие методы управления
В период 18 -х годов века произошла эволюция двигателей постоянного тока. Развитие двигателей постоянного тока значительно расширилось, и они широко применяются во многих отраслях промышленности.В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Что такое двигатель постоянного тока?
Двигатель постоянного тока работает от постоянного тока, преобразуя полученную электрическую энергию в механическую.Это вызывает изменение вращения в самом устройстве, таким образом обеспечивая питание для работы различных приложений в нескольких областях.
Управление скоростью двигателя постоянного тока — одна из наиболее полезных функций двигателя. Управляя скоростью двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Механизм контроля скорости применим во многих случаях, например, для управления движением роботизированных транспортных средств, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник помещен в магнитное поле, на него действует механическая сила. В практическом двигателе постоянного тока якорь является проводником по току, а поле создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо суммируется с магнитным потоком из-за обмоток возбуждения в одном направлении, либо компенсирует магнитный поток, обусловленный обмотками возбуждения.Накопление магнитного потока в одном направлении по сравнению с другим оказывает давление на проводник, и поэтому он начинает вращаться.
Согласно закону электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС. Эта ЭДС, согласно закону Ленца, имеет тенденцию противодействовать причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока имеет особую характеристику регулирования крутящего момента в случае переменной нагрузки из-за обратной ЭДС.
Почему важно регулирование скорости двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя, где это прямое влияние на функциональность машины и так важно для производительности и результатов работы.Во время сверления каждый материал имеет свою скорость вращения, которая также меняется в зависимости от размера сверла.
В сценарии с насосными установками будет изменение производительности, поэтому конвейерная лента должна быть синхронизирована с функциональной скоростью устройства. Эти факторы прямо или косвенно зависят от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Регулировка скорости двигателя постоянного тока осуществляется либо вручную рабочим, либо с помощью любого инструмента автоматического управления.Похоже, что это контрастирует с ограничением скорости, когда должно быть регулирование скорости, противодействующее естественному изменению скорости из-за изменения нагрузки на вал.
Принцип управления скоростью
Из приведенного выше рисунка уравнение напряжения для простого двигателя постоянного тока:
В = Eb + IaRa
В — подаваемое напряжение, Eb — обратная ЭДС, Ia — якорь ток, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянное
Z — количество проводников
N — частота вращения двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ( (PøNZ) / 60A) + IaRa
Или, V — IaRa = (PøNZ) / 60A
, то есть N = (PZ / 60A) (V — IaRa) / ø
. записывается как:
N = K (V — IaRa) / ø, K — постоянная величина
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения на якоре.
- Скорость двигателя обратно пропорциональна потоку из-за полевых выводов
Таким образом, скорость двигателя постоянного тока можно контролировать тремя способами:
- Изменяя напряжение питания
- Изменяя поток, и изменяя ток через обмотку возбуждения
- Изменяя напряжение якоря и изменяя сопротивление якоря
Различные методы управления скоростью двигателя постоянного тока
Поскольку существует два типа двигателей постоянного тока, здесь мы четко обсудим методы управления скоростью как последовательных, так и параллельных двигателей постоянного тока.
Управление скоростью двигателя постоянного тока в серийных типах
Его можно разделить на два типа:
- Техника управления якорем
- Техника управления полем
Техника управления якорем далее подразделяется на три типа
- Якорь управляемое сопротивление
- Управление шунтированным якорем
- Напряжение на клеммах якоря
Управляемое сопротивление якоря
Этот метод наиболее широко используется там, где регулирующее сопротивление последовательно соединено с сопротивлением питания двигателя.Изображение ниже объясняет это.
Контроль сопротивления якоряПотери мощности, возникающие в управляющем сопротивлении двигателя постоянного тока, можно игнорировать, поскольку этот метод регулирования в основном используется в течение длительного периода времени для снижения скорости во время сценариев легкой нагрузки. Это рентабельный метод получения постоянного крутящего момента, который в основном применяется в приводных кранах, поездах и других транспортных средствах.
Управление шунтированным якорем
Здесь реостат будет иметь как последовательное, так и шунтирующее соединение с якорем.Будет изменяться уровень напряжения, подаваемого на якорь, и это зависит от изменения последовательного реостата. Тогда как изменение тока возбуждения происходит за счет смены шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог из-за значительных потерь мощности в сопротивлениях регулирования скорости. Скорость можно до некоторой степени регулировать, но не выше нормального уровня.
Метод управления скоростью двигателя постоянного тока с шунтированным якоремНапряжение на клеммах якоря
Скорость двигателя постоянного тока также может быть достигнута путем подачи питания на двигатель с использованием индивидуального переменного напряжения питания, но этот подход является дорогостоящим и широко не применяется.
Техника с полевым управлением далее подразделяется на два типа:
- Полевой дивертер
- Управление задействованным полем (управление полевым полем)
Техника полевого дивертора
В этом методе используется дивертор. Скорость потока, проходящего через поле, можно уменьшить, шунтировав некоторую часть тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Регулировка скорости двигателя постоянного тока с переключателем возбужденияУправление отводным полем
Здесь также, с уменьшением магнитного потока, скорость будет увеличиваться, и это достигается за счет уменьшения количества витков обмотки возбуждения, откуда протекает ток. Здесь убирают количество ответвлений в обмотке возбуждения и этот прием используется в электрических тягах.
Регулирование скорости параллельного двигателя постоянного тока
Его можно разделить на два типа:
- Метод управления полем
- Метод управления якорем
Метод управления полем шунтирующего двигателя постоянного тока
В этом методе магнитный поток, создаваемый обмотками возбуждения, варьируется для изменения скорости двигателя.
Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, изменяя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной. При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается.Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Метод управления сопротивлением якоря для параллельного двигателя постоянного тока
С помощью этого метода скорость двигателя постоянного тока можно регулировать путем управления сопротивлением якоря для управления падением напряжения на якоре. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает своего минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре снижается. Это, в свою очередь, приводит к снижению скорости двигателя.
С помощью этого метода достигается скорость двигателя ниже его нормального диапазона.
Метод управления напряжением якоря для параллельного двигателя постоянного тока (метод Уорда Леонарда)
Метод Уорда Леонарда для схемы управления скоростью двигателя постоянного тока показан следующим образом:
На приведенном выше рисунке M — это главный двигатель, скорость которого равна должен регулироваться, а G соответствует индивидуально возбужденному генератору постоянного тока, который приводится в действие трехфазным двигателем, и он может быть синхронным или асинхронным.Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Напряжение генератора изменяется путем изменения тока возбуждения генератора. Этот уровень напряжения, когда он подается на секцию якоря двигателя постоянного тока, а затем M изменяется. Чтобы поддерживать постоянным поток поля двигателя, ток возбуждения двигателя должен поддерживаться постоянным. Когда скорость двигателя регулируется, ток якоря двигателя должен быть таким же, как и номинальный уровень.
Поставляемый ток возбуждения будет другим, так что уровень напряжения якоря будет варьироваться от «0» до номинального уровня. Поскольку регулирование скорости соответствует номинальному току и постоянному потоку поля двигателя и магнитному потоку поля до достижения номинальной скорости. И поскольку мощность является продуктом скорости и крутящего момента, она прямо пропорциональна скорости. При этом при увеличении мощности скорость увеличивается.
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне.Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем связан с огромными потерями мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Следовательно, с помощью метода Уорда Леонарда регулируемый силовой привод и постоянное значение крутящего момента достигаются от минимального уровня скорости до уровня базовой скорости. Техника регулирования потока поля в основном используется, когда уровень скорости больше, чем базовая скорость.
Здесь в функциональности ток якоря поддерживается на постоянном уровне при заданном значении, а значение напряжения генератора поддерживается на постоянном уровне. В таком методе на обмотку возбуждения подается фиксированное напряжение, а на якорь — переменное напряжение.
Один такой метод управления напряжением включает использование механизма распределительного устройства для подачи переменного напряжения на якорь, а другой использует генератор переменного тока с приводом от двигателя для подачи переменного напряжения на якорь (система Уорда-Леонарда). .
Преимущества и недостатки методики Уорда Леонарда d:
Преимущества использования техники Уорда Леонарда для управления скоростью двигателя постоянного тока следующие:
- В обоих направлениях можно управлять скоростью устройства. плавным образом для расширенного диапазона
- Этот метод обладает внутренней тормозной способностью
- Задние реактивные вольт-амперы уравновешиваются посредством привода, а синхронный двигатель с сильным возбуждением действует как привод, поэтому коэффициент мощности будет увеличиваться
- Когда возникает мигающая нагрузка, приводным двигателем является асинхронный двигатель с маховиком, который используется для уменьшения мгновенной нагрузки до минимального уровня.
Недостатки метода Уорда Леонарда: комплект двигателя и генератора, стоимость больше
И применение метода Уорда Леонарда плавное управление скоростью в двигателе постоянного тока.Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Помимо этих двух методов, наиболее широко используемым является регулирование скорости двигателя постоянного тока с использованием ШИМ для управления скоростью двигателя постоянного тока. ШИМ включает в себя приложение импульсов переменной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Метод управления напряжениемНа приведенной выше блок-схеме представлен простой регулятор скорости электродвигателя. Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвер двигателя представляет собой микросхему L293D, которая состоит из H-мостовых схем для управления двигателем.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя. Изменение импульсов осуществляется микроконтроллером с помощью входного сигнала от кнопок.Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения рабочего цикла импульсов.
Итак, в этой статье дается подробное объяснение различных методов управления скоростью двигателя постоянного тока и того, как регулирование скорости наиболее важно соблюдать. Кроме того, рекомендуется знать о контроллере скорости двигателя 12 В постоянного тока.
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основные сведения о двигателе переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током.Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки. Двигатель переменного тока состоит из двух основных компонентов: стационарного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает двигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма.Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
ПродуктыAC Motor имеют два варианта управления с обратной связью. Эти опции представляют собой преобразователь двигателя переменного тока или датчик двигателя переменного тока.И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно отличаются.
В резольверах двигателей переменного тока используется второй набор обмоток статора, называемый трансформатором, для создания напряжения на роторе через воздушный зазор. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер электродвигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции.Резольвер часто используется в суровых условиях.
В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, проходящего через воздушный зазор между источником света и фотодетектором. Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому они должны быть основным приоритетом для любого приложения.Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы двигателей переменного тока
Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные. Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами.Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота. Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается.Ротор также может вращаться со скоростью, кратной величине подаваемого тока. Контактные кольца или постоянный магнит, на который подается ток, — это то, что создает магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного тока разработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт, работающие в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Асинхронные двигатели в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для чего используются двигатели переменного тока?
Двигатели переменного тока можно найти во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Аудиопроигрыватели
— Вентиляторы
Их также можно найти в промышленных применениях:
— насосы
— нагнетатели
— конвейеры
— компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, контролирующее скорость двигателя переменного тока.Контроллер переменного тока также может упоминаться как преобразователь частоты, преобразователь частоты, преобразователь частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Как правило, контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток (постоянный ток), а инвертор переключает постоянное напряжение на выходное переменное напряжение регулируемой частоты. При необходимости инвертор также можно использовать для управления выходным током. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время используются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— генерирует большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное регулирование скорости, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода в приложение позволяет регулировать скорость двигателя в соответствии с нагрузкой двигателя, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, работает в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируемое повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% от его номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потери энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, а затем включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Затем этот сигнал регулирует выходное напряжение в соответствии с предпочтительным заданным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением и ручной регулировкой скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно контролировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться чрезмерный крутящий момент защищен
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции VFD включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (PWM). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все популярнее среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, промежуточного звена постоянного тока и инвертора, но конструкция каждого из них зависит от привода. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип преобразователя частоты (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Чтобы поддерживать правильное соотношение напряжения и частоты (Вольт / Герц), напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму волны переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение двигателя.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители используют либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы снизить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя, когда выходная частота ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что в VSI используется выпрямитель на диодном мосту для преобразования переменного напряжения в постоянное. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение двигателя.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубцы двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Привод с частотно-регулируемым приводом с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на 230 В или 460 В, 3-фазный режим работы и обеспечивают выходные частоты в диапазоне 2-400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенерационный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой крутящий момент (индукция)
— Отсутствие скольжения (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывания вращения (индукция)
— Необходим пусковой выключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. В любом случае ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что мы прилагаем все усилия, чтобы дать надежные рекомендации относительно линейки двигателей переменного тока, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1: Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. Если возможно, смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запуститься, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие любых признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Двигатель переменного тока может быть разумным и экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продуктов для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Наиболее распространенным типом ротора, используемого в двигателях переменного тока, является ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри корпуса двигателя, ротор установлен внутри, а между ними имеется зазор, отделяющий их от соприкосновения. Кожух представляет собой корпус двигателя, содержащий два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Число полюсов:
Мощность в лошадиных силах:
1 Двигатель
Глоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным.
Переменный ток — Электрический заряд, который часто меняет направление (в отличие от постоянного тока, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работая за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному числу x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже, чем синхронная скорость, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться как компонент источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с разделенной фазой — Двигатели, которые могут генерировать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Крутящий момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, если двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Необходимое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе двигателей переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха устойчивый и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте, нет ли корродированных клемм в распределительной коробке и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное тепло.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание. Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по электромонтажу линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, каналах ввода / вывода и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений в параметрах системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к отказу и / или потерям. После того, как система двигателя переменного тока подключена, не включайте / выключайте источник питания напрямую. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы двигателя переменного тока.
Строго соблюдайте следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру.
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленное зажимное соединение на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Чтобы избежать возможности поражения электрическим током, выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Крепление двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы двигателей переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе электродвигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно принять во внимание проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока во время работы выделяет тепло; поэтому при проектировании системы следует учитывать рассеивание тепла.Размер шкафа должен быть таким, чтобы не превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать электродвигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Двигатель переменного тока должен быть установлен устойчиво и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, чтобы они были недоступны для оператора или неквалифицированного человека. .Как и любую движущуюся часть в системе, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая защиту IP66. Чтобы улучшить соединение между шиной питания и вспомогательной панелью, сделайте вспомогательную панель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. Клиент несет полную ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему двигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если ваше приложение требует определенных IP-адресов. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом защищены и / или закрыты, чтобы предотвратить несанкционированный контакт человека с цепями под напряжением. Запрещается выполнять какие-либо работы при включенном питании.
НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока остается некоторое количество электроэнергии.
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История двигателя переменного тока
Изобретение двигателя переменного тока Асинхронные двигатели
переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня называют асинхронным двигателем переменного тока.
Развитие двигателя переменного тока
Двигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в управлении скоростью асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторные элементы управления полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателей переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Дополнительные сведения и варианты см. На странице «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока — это система 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с двигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для применений, которые подвержены разряду батареи, потере энергии или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты двигателя переменного тока также помогают предотвратить сильные скачки тока.
Вентиляторы двигателя переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателя переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены на заказ с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие и столы X-Y.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его акцент на исследованиях и разработках обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качества продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными требованиями к конструкции. Иногда настройка настолько проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации Anaheim.
Двигатель переменного тока Anaheim Automation
Инженерыценят то, что линейка двигателей переменного тока Anaheim Automation отвечает их стремлению к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат на индивидуальную конструкцию двигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation уделяет особое внимание их конкретным системным требованиям.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. В то время как значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной марки, компания гордится своей стандартной базой складских запасов, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, маркировку или требования защиты от несанкционированного доступа, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку и проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насоса, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы присвоили двигателю переменного тока «частную марку», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Тест двигателя переменного тока
Вопрос: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
Q: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
Q: Какой двигатель обычно применяется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
Q: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
В: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его работы необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, мотор перегорит.
Часто задаваемые вопросы по двигателям переменного тока:
В: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что увеличивает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
В: В чем разница между частотно-регулируемым приводом и регулируемым приводом?
A: Приводы с регулируемой частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. VSD, с другой стороны, изменяют напряжение для управления двигателем постоянного тока.
В: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
Q: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель регулировки скорости.
Q: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
В: Почему некоторые редукторы электродвигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении?
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.) Это снижение скорости является результатом использования нескольких передач; количество передач в зависимости от величины снижения скорости. Однако вращение последней шестерни определяет направление выходного вала.
В: Повлияют ли на асинхронный двигатель переменного тока большие колебания напряжения питания?
A: Напряжение источника питания влияет на крутящий момент, создаваемый двигателем. Крутящий момент примерно в два раза больше напряжения источника питания. Таким образом, при использовании двигателей с большими колебаниями напряжения питания важно помнить, что создаваемый крутящий момент будет изменяться.
УПРАВЛЕНИЕ ДЛЯ РЕГУЛИРОВКИ И РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
УРОВЕНЬ ТЕХНИКИНастоящее изобретение относится к электродвигателям и их регулировке и регулированию скорости.
До сих пор электродвигатели переменного тока с регулируемой скоростью в основном подразделялись на три основные категории:
A. Где мощность сети переменного тока преобразуется в регулируемую мощность постоянного тока для работы двигателя постоянного тока.
B. При этом мощность линии переменного тока преобразуется в мощность переменного тока с регулируемой частотой и напряжением для использования с двигателем переменного тока.
C. То, в котором мощность линии переменного тока преобразуется в мощность переменного тока с регулируемым напряжением для использования со специальным двигателем переменного тока с высоким скольжением, эта система в зависимости от нагрузки снижает скорость до требуемых об / мин.
Для всех вышеперечисленных устройств требуется, чтобы блок преобразования был достаточно большим, чтобы обеспечить работу с полной мощностью, необходимой для двигателя с регулируемой скоростью.
В настоящем изобретении регулировка и регулирование скорости двигателя переменного тока осуществляется в соответствии с новой концепцией, которая позволяет подключать обычный двигатель переменного тока типа с фазным ротором с его первичной обмоткой, обычно статором. к сети переменного тока; и, благодаря использованию новых средств управления, связанных с вторичной обмоткой ротора, любая заданная скорость и любой выходной крутящий момент от 0 до 100 процентов номинального крутящего момента могут поддерживаться в диапазоне скоростей размыкания и замыкания цепи вторичной обмотки в контролируемым образом.Регулирование скорости действует как простое двухпозиционное регулирование и не обязательно должно иметь возможность обрабатывать всю электрическую мощность, необходимую для двигателя, что позволяет двигателю работать более эффективно, экономично и без обслуживания с большей надежностью, чем у двигателя. моторные устройства в основных категориях, описанных выше.
Например, в случае трехфазного двигателя с контактным кольцом или с фазным ротором, если выводы контактных колец закорочены, замыкая цепь вторичной обмотки, двигатель будет работать как двигатель с короткозамкнутым ротором; но, если провода разомкнуты, в роторе не будет протекать ток, не будет развиваться крутящий момент, и двигатель не будет работать.В таких условиях единственным током, протекающим в статоре, будет ток намагничивания.
В настоящем изобретении предлагается использовать изменения мощности ротора во время условий работы в качестве функции управления и предоставить новое устройство управления, при котором вторичная цепь ротора будет быстро открываться и закрываться для выработки импульсной мощности. . Изменяя длительность импульсов мощности, можно изменять средний крутящий момент и, следовательно, регулировать скорость в ответ на обнаруженный сигнал.В соответствии с настоящим изобретением напряжение сигнала представляет собой комбинацию этой функции управления с выходным напряжением чувствительного к скорости преобразователя и опорным напряжением, которое может быть установлено в соответствии с желаемой скоростью, при этом результирующее напряжение сигнала используется для управления работой твердотельного преобразователя. компоненты переключения состояния, такие как SCR или TRIACS для размыкания и замыкания вторичной цепи двигателя.
Использование вышеупомянутой новой концепции показывает, что чрезвычайно хорошее регулирование скорости является неотъемлемой характеристикой двигателя и связанного с ним управления, даже при высоких перегрузках, и что крутящий момент при поломке и остановке высок даже на очень низких скоростях.Было обнаружено, что из-за чрезвычайно низкого пускового пуска и заторможенного тока ротора кратковременные состояния остановки, частые запуски, закупоривание и реверсирование затвора находятся в пределах возможностей устройства без модификации двигателя или управления, как раскрыто для настоящего изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к электродвигателям и, в частности, касается усовершенствованных средств управления для регулировки и регулирования скорости двигателей переменного тока.
Одной из целей раскрытого здесь изобретения является обеспечение надежного управления небольшими размерами, которые могут быть установлены в небольшом пространстве рядом с двигателем или удаленно от двигателя, с которым он используется, и который в сочетании с двигателем позволяет использовать стандартного электродвигателя с переменным током и ротором таким образом, чтобы можно было регулировать и регулировать его скорость.
Еще одной задачей является обеспечение регулирования скорости и управления регулированием для двигателя переменного тока, в котором цепь обмотки ротора будет разомкнута и замкнута накоротко и генерировать импульсы мощности, а длительность импульсов мощности может изменяться по порядку для изменения среднего крутящего момента и регулируемой скорости двигателя.
Еще одна цель состоит в том, чтобы обеспечить регулировку скорости и управление регулированием для двигателей переменного тока, в котором используются твердотельные компоненты, которые управляются в ответ на изменения воспринимаемого сигнала, и в котором характеристики воспринимаемого сигнала изменяются путем сравнения скорости выходное напряжение чувствительного преобразователя с опорным напряжением, которое можно регулировать в соответствии с желаемой скоростью двигателя, при этом изменения воспринимаемого сигнала используются для приведения в действие переключающих компонентов для размыкания или замыкания цепи обмотки ротора.
Другая цель — обеспечить регулировку скорости и управление регулированием для двигателя переменного тока типа с фазным ротором, которое будет автоматически регулировать мощность ротора таким образом, чтобы поддерживать заданную скорость в условиях изменяющейся нагрузки на вал, управляя точкой воспламенения электронного переключающий компонент дважды за каждый цикл в каждой фазе обмотки ротора.
Еще одна задача состоит в том, чтобы обеспечить управление, подобное вышеизложенному, в котором схема интегратора используется для обеспечения функции управления, пропорциональной мощности ротора, для определения точек срабатывания электронных переключающих компонентов, и при этом интегратор сбрасывается в конце каждого переменного цикла мощности, чтобы обеспечить постоянное значение срабатывания, а не функцию линейного изменения.
Еще одна цель — предоставить уникальное реле управления, которое реагирует на характеристику скорости двигателя, для автоматического изменения компонентов резистора в цепях обмотки ротора при выбранных значениях скорости для увеличения крутящего момента ротора, особенно на более низких скоростях в зависимости от в зависимости от требований к установке и для уменьшения рассеивания тепла в роторе.
Дополнительные цели и преимущества изобретения будут раскрыты в следующей части описания, в которой подробное описание предназначено для целенаправленного раскрытия одного варианта осуществления изобретения без наложения на него ограничений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Со ссылкой на прилагаемые чертежи, которые служат только для иллюстративных целей:
Фиг. 1 — блок-схема, показывающая средство управления согласно настоящему изобретению вместе с двигателем переменного тока, с которым оно связано;
РИС. 2 — принципиальная схема, схематически раскрывающая детали схемы блока интегратора-компаратора системы управления для генерации выходного сигнала для запуска средства электронного переключения, связанного с обмотками ротора двигателя;
РИС.3 — принципиальная схема, схематически раскрывающая детали схемы датчика скорости и взаимосвязанных частей управления скоростью устройства управления по настоящему изобретению; и
ФИГ. 4 — принципиальная схема, схематически раскрывающая детали схемы автоматического релейного управления, воплощенного в изобретении.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Более конкретно, на чертежах, в иллюстративных целях, устройство управления по настоящему изобретению показано на блок-схеме, фиг.1, который используется с трехфазным двигателем переменного тока обычной конструкции, как в целом обозначено цифрой 10, и содержит обычную обмотку 11 статора и обмотку 12 ротора. Обмотка статора показана как Y-соединенная с клеммами линии L1, L2 и L3, которые могут быть подключены к подходящему переменному трехфазному источнику питания обычным способом. Обмотка ротора также показана как Y-соединенная и имеющая клеммы M1, M2 и M3, которые обычно подключены к контактным кольцам (не показаны), и в этом случае соединены с выводами внешнего соединения 13a, 13b и 13c. .Эти выводы соединены соответственно с выводами 14a, 14b и 14c блока управления, как в общем обозначено позицией 15, и которые могут быть установлены рядом с двигателем, которым нужно управлять, или удаленно от него. Каждый из соединительных выводов 13a, 13b и 13c снабжен одним или несколькими токоограничивающими резисторами, такими как 16a и 16b, которые используются для увеличения крутящего момента на более низкой скорости и могут варьироваться в зависимости от конкретного применения и размера двигателя. Эти резисторы также уменьшают часть тепла, рассеиваемого ротором.
Обычно двигатели с фазным ротором управляются путем закорачивания последовательных резисторов в каждой фазной обмотке, чтобы изменить скорость от низкой до максимальной, при которой все резисторы закорочены. Этот тип управления требует использования большего количества контакторов и связанного с ними коммутационного оборудования, что требует нежелательного дополнительного пространства, которое не всегда доступно и действительно делает установку очень сложной. В настоящем изобретении управление скоростью достигается путем размыкания и закорачивания обмоток ротора при фиксированном соотношении включения / выключения для получения требуемого количества мощности для конкретной настройки скорости в роторе.Чем дольше обмотки ротора остаются закороченными, тем выше будет вырабатываемая мощность и, следовательно, выше будет скорость вращения ротора. Переключение осуществляется в каждой фазе проводов ротора двигателя с помощью электронного переключающего устройства 17 и соответствующего диода 18, подключенных параллельно, переключающее устройство и диод соединены как единое целое между соединительным проводом и землей 19. Переключающее устройство показано. как содержащий кремниевый управляемый выпрямитель, известный как SCR.Коммутационное устройство снабжено электродом 17a управления затвором, который соединяется с выводом 20 блока управления 15. Катодный электрод 17b соединяется с землей 19, а анод 17c соединяется с соединительным проводом, в данном случае соединительным выводом 13a, и вывод 21 блока управления.
Когда коммутирующее устройство 17 и диод 18 соединены таким образом, очевидно, что сигнал, который появляется на переключающем устройстве, когда он не является проводящим, будет выпрямленной полуволной.Кроме того, поскольку выходы трех обмоток ротора находятся с фазовым соотношением 120 °, управление каждой цепью обмотки выполняется независимо в отношении определения времени срабатывания переключающего устройства, связанного с ней. Схема управления в каждом случае идентична, но зависит от конкретного фазового соотношения входящего сигнала ротора. Чтобы управлять мощностью в обмотке ротора, которая, в свою очередь, регулирует скорость двигателя, переключающие устройства должны срабатывать при определенном угле проводимости в каждом цикле, а также должны срабатывать с последовательной задержкой фазового соотношения 120 ° относительно друг друга.
Следует принять во внимание, что угол проводимости не может быть определен как функция частоты или напряжения ротора независимо по той причине, что при нулевой скорости частота сигнала ротора переменного тока составляет 60 циклов, а напряжение является максимальным, а при синхронной скорости выходной сигнал частота и напряжение равны нулю. В качестве важной особенности настоящего изобретения использование этих характеристик ротора стало возможным благодаря обеспечению электронного интегратора 22, с помощью которого можно определить угол проводимости для каждой обмотки ротора.Выходное напряжение интегратора в каждом случае пропорционально мощности в обмотке ротора, с которой он связан, и, используя компаратор 23 для сравнения выхода интегратора с известным опорным напряжением, можно точно определить угол проводимости. . Интегратора и компаратор соединены таким образом, что, когда напряжение интегратора становится равным опорным напряжение, компаратор будет переключаться на управление инициирующей или стробирование схемы соответствующего переключающего устройства 17.Это обеспечивает контроль, который позволяет изменение угла проводимости просто путем изменения опорного напряжения, а также путем изменения угла проводимости будет изменять величину мощности в роторе и его последующей скорости.
Чтобы получить постоянную скорость во время изменения нагрузки двигателя и его входного напряжения, предусмотрено устройство измерения скорости, которое определяет изменения скорости ротора двигателя и выдает выходное напряжение, которое изменяется в зависимости от скорость мотора.Устройство звукоснимателя может различаться по своей конструкции и принципу действия, но в одной из форм, как показано, может содержать индукционный генератор, который будет вырабатывать сигнал переменного тока, пропорциональный скорости двигателя. Как схематически показано, устройство измерения скорости содержит магнитный сердечник 25, имеющий магнитную связь с катушкой 26. Магнитный путь в сердечнике выполнен с возможностью модуляции с помощью соответствующего зубчатого ротора 27, приводимого в действие ротором двигателя. Выход катушки 26 подключен к выводам 28 и 29 блока управления 15.
Выход датчика 24 подается на двухполупериодный мостовой выпрямитель 30, выход которого соединен с активным фильтром нижних частот 31 с целью удаления частотной составляющей переменного тока из выпрямленного сигнала. для того, чтобы вывод был максимально чистым и давал настоящий аналог скорости. Этот выходной сигнал из активного фильтра нижних частот 31, таким образом, представляет собой определенную скорость, которую можно сравнить с известным опорным напряжением с помощью контурного фильтра и ссылки 32, известное опорное напряжение в этом случае, содержащее напряжение, получаемое от источника питания в пределах блок 15 управления, который можно регулировать с помощью потенциометра 33 управления скоростью, подключенного к клеммам 34 и 35 блока управления, и с подвижным контактом 36, подключенным к клемме 37 блока управления.
Контурный фильтр устроен так, что его выходное напряжение увеличивается или уменьшается со скоростью, пропорциональной разнице между опорным напряжением, подаваемым от регулятора 33 скорости, и аналогом напряжения постоянного тока скорости, исходящим от датчика скорости 24. Если напряжение управления скоростью больше, чем напряжение срабатывания скорости, выходной сигнал контурного фильтра 32 увеличивается до тех пор, пока напряжение срабатывания скорости не сравняется с напряжением управления скоростью, а затем удерживает это выходное напряжение, которое становится опорным напряжением компаратора.Это действие происходит потому, что увеличение выходного напряжения контурного фильтра действует через компаратор, вызывая увеличение угла проводимости ротора, после чего скорость ротора увеличивается и, в свою очередь, вызывает увеличение напряжения срабатывания скорости. Следовательно, можно видеть, что контурный фильтр будет управлять углом проводимости таким образом, что при изменении нагрузки напряжение срабатывания скорости будет равно напряжению управления скоростью, тем самым поддерживая постоянную скорость. Обратное вышесказанное также верно в том, что, изменяя напряжение управления скоростью, можно изменять скорость двигателя.В блок 15 управления также включен источник питания, как в целом обозначено позицией 38, вход этого источника питания соединен с выводами 39, 40 и 41 блока управления, чтобы получать напряжение питания переменного тока от подходящего источника низкое напряжение, такое как показано подключенной катушкой 42. Это напряжение может быть получено от любого источника и, при желании, может исходить от катушки 42 ‘, которая индуктивно связана с одной из обмоток с фазовым смещением статора двигателя. Схема блока питания обычная и может обеспечивать выходное напряжение +15, -15 и +25.Выход 25 В не регулируется, поскольку требуется только для срабатывания переключающих устройств 17. Выходы плюс и минус 15 В хорошо регулируются, поскольку эти напряжения используются для определения опорных напряжений, используемых в схеме управления скоростью.
В блоке 15 управления также предусмотрено реле управления, как в целом обозначено позицией 43. Входное соединение 44 подает аналоговый выход скорости постоянного напряжения активного фильтра нижних частот 31 на реле управления, в котором аналоговое напряжение скорости сравнивается. в нескольких компараторах с регулируемыми предварительно установленными опорными напряжениями для обеспечения средств переключения для выборочного включения управляющих реле на разных уровнях скорости, чтобы управлять коротким замыканием резисторов в соединениях выводов ротора двигателя желаемым образом.Для иллюстрации показаны два реле с рабочими катушками 45 и 46. Каждое реле имеет контакты в каждом из выводных проводов 13a, 13b и 13c от ротора двигателя. Например, обмотка 45 реле выполнена с возможностью замыкания при подаче напряжения контактов 45a, 45b и 45c, которые закорачивают резистор 16a в каждом выводе. Катушка 46 реле предназначена для приведения в действие контактов 46a, 46b и 46c. В качестве примера использования этих реле оба реле должны иметь свои контакты в разомкнутом положении в диапазоне низких скоростей, например.г., 0-900 об. / мин. Когда скорость увеличивается до диапазона, например, 900-1200 об / мин, одно из этих реле срабатывает, закорачивая резистор в каждом из соединительных проводов ротора. В диапазоне высоких скоростей, например, 1200–1800 об / мин, другое реле должно срабатывать, закорачивая оставшийся резистор в каждом проводе. Таким образом, управление крутящим моментом обеспечивается в различных диапазонах скорости работы двигателя в зависимости от требований установки.
Для удобства визуальной индикации скорости двигателя предусмотрен индикатор 47 скорости, соединенный схемой 48 с аналоговым выходным сигналом напряжения постоянного тока активного фильтра 31 нижних частот.
Для более подробного описания схемы сделана ссылка на фиг. 2, 3 и 4. Поскольку каждая фаза на выходе ротора содержит комбинацию интегратор-компаратор, имеющую аналогичную схему, будет описана схема только одной из комбинаций интегратор-компаратор. Как показано в основном на фиг. 2, интегратор 22 использует транзистор 50 и транзистор 51, входной сигнал подается непосредственно от соединительного провода ротора, подключенного к клемме 14a через провод 52 к эмиттеру 53 транзистора 50, его коллектор 54 подключен к земле.Вход транзистора 50 содержит резистор 55, который соединен в месте соединения с эмиттером 53 через соединение 56 с базой 57 транзистора 51. Соединение 56 также соединяется с одной стороной конденсатора 58, другой стороной. заземления этого конденсатора. Резистор 55 и конденсатор 58, соединенные таким образом, составляют цепь интегратора RC, выход которой пропорционален мощности в подключенной фазной обмотке ротора. Выход этой схемы поступает на транзистор 51, который служит буферным каскадом усилителя.Провод 59 соединяет вывод 21 блока управления через резистор 60 с базой 61 транзистора 50, база также через диод 62 соединена с соединением резисторов 63 и 64. Резистор 63 соединен с землей, а резистор 64 подключается к положительной стороне установленного напряжения питания. Резисторы 60, 63 и 64 вместе с диодом 62 используются для обеспечения комбинации резистора и эквивалентного стабилитрона для защиты базы транзистора 50 от высоких напряжений, возникающих на роторе.Резистор 65 подключен с одной стороны к положительному питающему напряжению, а с другой — через диод 66 с выводом 56, а через ответвленную цепь через другой диод 67 — с землей. Этот резистор и два диода используются для генерации тока смещения для компенсации тока утечки базы транзистора 51, который управляется схемой интегратора. При подключенном транзисторе 50, как описано выше, этот транзистор будет сбрасывать интегратор в ноль на каждом полупериоде.Это необходимо по той причине, что напряжение ротора состоит из полуволнового выпрямленного напряжения с составляющей постоянного тока, которая, если ее не сбросить, заставила бы выход интегратора продолжать увеличиваться с каждым циклом. Таким образом, достигается постоянное значение срабатывания, а не функция линейного изменения.
Транзистор 51 имеет коллектор 68, соединенный через резистор 69 с положительной стороной напряжения питания, в то время как его эмиттер 70 подключен через последовательные резисторы 71 и 72 к отрицательной стороне напряжения питания.На стыке резисторов 71 и 72 ответвление приводит к заземлению через резистор 73. Эти резисторы имеют значение, чтобы установить коэффициент усиления транзистора 51 на 2 и буферизовать интегратор из схемы компаратора.
Компаратор 23 представляет собой схему, в которой транзисторы 74 и 75 соединены между собой, чтобы обеспечить дифференциальный усилитель, который управляет транзистором 76 в качестве дополнительного каскада усилителя, выход этого каскада используется для управления транзистором 77 и эмиттерным повторителем для управления Схема управления затвором коммутационного устройства 17 подключенной фазной обмотки ротора двигателя.
Транзистор 74 имеет коллектор 78, соединенный непосредственно со стороной положительного напряжения питания схемы, в то время как транзистор 75 имеет коллектор 79, подключенный к стороне положительного напряжения питания через резистор 80. Соответствующие эмиттеры 81 и 82 этих двух транзисторов являются соединены через общий резистор 83 с отрицательной стороной питающего напряжения. База 84 транзистора 74 подключена к одному входу компаратора, который в данном случае представляет собой выход транзистора 51.Транзистор 75 имеет свою базу 85, соединенную с другим входом компаратора, который в этом случае поступает от выходного соединения опорного напряжения 86 фильтра 32 контура, это соединение делается с основанием 85 через резистор 87 и диод 88. Резистора 89 соединение между эмиттером 90 транзистора 77 и переходом между резистором 87 и диодом 88 обеспечивает вход положительной обратной связи, который функционирует для получения гистерезиса и быстрого времени переключения в результате более резких импульсов в компараторе.Резистор 91 и конденсатор 92, подключенные между проводом 59 и землей, создают параллельную цепь с соответствующим переключающим устройством 17 и обеспечивают правильное фазовое соотношение на роторе, так что переключающее устройство не срабатывает преждевременно. Импульсный отключающий выход из транзистора 77 проходит по проводнику 93, ведущему к клемме 20 блока управления 15.
Обратимся теперь к фиг. 3, активный фильтр нижних частот принимает выпрямленный сигнал датчика скорости через выходной проводник 94, выход выпрямителя нагружается резистором 95.Фильтр нижних частот состоит из последовательно соединенных резисторов 96 и 97, ведущих к положительному выводу 98 операционного усилителя, как обычно обозначено позицией 99, и который используется для уменьшения пульсаций на выходе выпрямителя и обеспечения на выходном соединении 100 более чистого Постоянный ток для входа в контурный фильтр 32. Выход усилителя имеет одно соединение, ведущее через конденсатор 101 к переходу между резисторами 96 и 97. Другое соединение ведет от выхода через резистор 102 к отрицательному выводу 103 на вход усилителя.Положительный вывод 98 соединяется через другой конденсатор 104 с землей. Таким образом, на выходном соединении 100 создается выходной аналог постоянного тока скорости двигателя.
Петлевой фильтр и опорный сигнал 32 составляют рабочую цепь опережения-запаздывания с использованием операционного усилителя, как в целом обозначено позицией 105. Отрицательный вывод 106 принимает выходной сигнал фильтра нижних частот через резистор 107. Положительный вывод 108 принимает опорный сигнал напряжение, установленное регулятором скорости 33 через резистор 109.Этот усилитель имеет высокое усиление, так что при очень небольших различиях между двумя входами усилителя будет получен большой выходной сигнал, который будет подаваться на выходное соединение 86. Соединение цепи от выхода усилителя к входному контакту 106, которое содержит резистор 110 и конденсатор 111 обеспечивают цепь обратной связи, которая вместе с резистором 107 определяет постоянную времени рабочего интегратора. Диод 112, подключенный к выходу усилителя, служит для ограничения выхода, чтобы он не качался отрицательно.
Опорное напряжение для регулировки скорости управления включает в себя регулировку потенциометра 113, который соединяет через цепь напряжения питания +15 и -15 вольт шунтируется диодом 114. Это используется, чтобы получить слегка отрицательное напряжение около 0,5 вольт на терминале 35 блока управления. Опорный потенциометр 113 используется для регулировки напряжения на соединении 115 усилителя 105, чтобы оно совпадало с выходным напряжением фильтра нижних частот на максимальной скорости, так что полный динамический диапазон потенциометра 33 управления скоростью может быть использован для скорости контроль.
Что касается схемы управления реле, показанной на фиг. 4, две схемы дифференциального усилителя компаратора, как в целом обозначенные позициями 106 и 107, в основном работают таким же образом, как и компаратор, описанный ранее и показанный на фиг. 2. Каждый из дифференциальных усилителей 106 и 107 выполнен с возможностью сравнения аналога скорости постоянного напряжения с предварительно установленным опорным напряжением, которое определяет уровни скорости, на которых желательно, чтобы реле 1 и 2 работали соответственно.Компаратор 106 используется для управления работой катушки 46 реле, в то время как компаратор 107 управляет работой катушки 45 реле. С учетом подробного описания компаратора в связи с фиг. 2, полагается, что нет необходимости подробно описывать схему и работу компараторов, используемых в релейном управлении.
Следует понимать, что описанная здесь схема может изменяться в отношении значений тех конкретных компонентов, которые были специально упомянуты; и в качестве иллюстрации следующие отмеченные значения были использованы в раскрытом успешно работающем устройстве.
Резисторы: 55820 кОм 60100 кОм 63 1 кОм 64 2,2 кОм 65 51 кОм 69 20 кОм 71 10 кОм 72 8,2 кОм 73 1 кОм 80 10 кОм 83 10 кОм 87 5,1 КОм 89 51 кОм 91 10 кОм 95 2,2 кОм 96100 кОм 97100 кОм 10220 кОм 107 62 кОм 109 22 кОм 110330 кОм
Конденсаторы: 58 0,47 мкФ 92 0,1 мкФ 101 0,47 микрофарад 104 0,02 мкФ 111 0,22 мкФ
Диоды: 18 IN 1187 R 62 IN 4154 66 IN 4154 67 IN 4154 88 IN 4154 112 IN 4154 114 IN 4154
транзисторы: 50 TQ 59 51 TN 59 74 TN 59 75 TN 59 76 TQ 59 77 TN 59
Кремниевый управляемый выпрямитель: 17 2 N 5170 R
Из вышеприведенного описания и чертежей будет ясно видно, что очерченные цели и особенности описанного здесь изобретения будут выполнены.
Специалистам в данной области техники могут быть предложены различные модификации, не выходящие за рамки сущности нашего изобретения, и, следовательно, мы не хотим ограничиваться конкретной показанной формой или упомянутым использованием, за исключением степени, указанной в прилагаемой формуле изобретения. .
Как добиться большей эффективности с помощью электродвигателей
Первый промышленный электродвигатель, вероятно, считался прорывом в свое время, даже несмотря на то, что было много возможностей для улучшения.По мере развития технологий производители двигателей разработали более совершенные двигатели, которые потребляют меньше энергии и требуют меньших затрат. Хотя для производителей естественно использовать новейшие технологии при создании электродвигателей, возможности для дальнейшего совершенствования методов производства сыграли важную роль в повышении эффективности этих двигателей.
Рассмотрим следующую статистику:
- В 2015 году мировой рынок электротехники оценивался в более чем 70 миллиардов долларов, и ожидается, что он будет расти со среднегодовыми темпами роста (CAGR) в 4 раза.2 процента с 2017 по 2025 год.
- По оценкам, к 2035 году мировое потребление электроэнергии достигнет 35 триллионов киловатт-часов, и почти 28 процентов будут использоваться электродвигателями.
- Девяносто процентов установленных двигателей работают непрерывно на полной скорости и используют механические системы для регулирования мощности.
Будущее определенно выглядит многообещающим!
Прежде чем перейти к изучению эффективности электродвигателей, важно больше узнать об общих двигателях, используемых в промышленности.
Простой двигатель постоянного тока преобразует электрическую энергию постоянного тока в механическую. Обычно он оснащен большим количеством катушек, что делает его эффективным. Тем не менее, это может привести к большим потерям энергии из-за трения между коллектором и щетками, а также потери крутящего момента при определенных углах. Более того, если двигатель застрянет при попытке поднять тяжелый груз, катушки ротора могут легко перегреться и расплавиться. Вот почему в ряде промышленных и тяжелых бытовых приборов используются электродвигатели.
Как производители могут экономить электроэнергию с помощью электродвигателей
Конструкция электродвигателя и способ его использования являются двумя определяющими факторами, которые помогают экономить электроэнергию. Давайте сначала посмотрим на аспект дизайна.
Использование медных обмоток в обмотках статора
Что касается проводимости двигателя, всегда лучше использовать медные катушки, чем устаревшие алюминиевые. Это потому, что проводимость алюминия ниже, чем у меди.Чтобы не отставать от медных катушек, алюминиевым магнитным проводам может потребоваться большее поперечное сечение, чтобы они могли обеспечивать такой же уровень проводимости. Обмотки, намотанные алюминиевой проволокой, могут иметь больший объем по сравнению с двигателем с медной проволокой того же размера.
Если вы все еще используете алюминиевые обмотки, убедитесь, что концы алюминиевого магнита правильно подключены. Алюминий окисляется намного быстрее, чем другие металлы, и если алюминиевый порошок подвергается воздействию воздуха, он полностью окисляется всего за несколько дней и оставляет после себя тонкий белый порошок.
Для правильного соединения, обеспечивающего хорошую проводимость, оксидный слой алюминиевого магнита необходимо проткнуть, чтобы предотвратить дальнейший контакт алюминия с воздухом.
Конечно, достижение КПД двигателя — это больше, чем просто выбор между алюминиевой и медной обмотками. Некоторые производители разработали обжимные соединители с прокалкой под высоким давлением для повышения эффективности. Это было сделано для того, чтобы алюминиевые обмотки не отставали от своих медных аналогов.Хотя двигатели с алюминиевыми обмотками могут сравниться по мощности с медными, это требует времени и денег. Алюминий также требует большего количества витков и провода большего диаметра, что не всегда может быть экономичным.
Если двигатель должен работать время от времени или в течение непродолжительного времени, а эффективность и объем не имеют значения, использование алюминиевых магнитных проводов может иметь смысл. В противном случае всегда следует отдавать предпочтение медным обмоткам.
Использование медных стержней в роторе
Когда дело доходит до роторов, медь также дает преимущество в эффективности.Медные роторы предпочтительны для энергоэффективных производств в развитых и развивающихся странах, где электричество часто бывает дефицитным и дорогостоящим. Медные роторы — лучший выбор по сравнению с алюминиевыми с точки зрения качества двигателя, надежности, стоимости, эффективности и срока службы.
Обработка движущихся деталей с точностью
Обработка влечет за собой удаление материала из отсека до очень переносимого вещества. Прецизионное оборудование необходимо для достижения максимальной точности при наименьшей измеримой степени.Будь то резка металла или добыча угля, точное оборудование может обеспечить точность, необходимую для производства материалов в желаемых количествах. Движущиеся части машины потребуют своевременного обслуживания для максимальной производительности и эффективности. Техническое обслуживание должно выполняться только специалистами, при этом должен потребоваться осмотр всех деталей.
Использование высококачественной стали для роторов и статоров
Высокотехнологичная электротехническая сталь необходима для производства экономичных статоров и роторов, используемых во множестве электродвигателей.Этот тип стали обеспечивает высокую магнитную проницаемость и низкие потери мощности для первоклассных характеристик. Однако потери мощности в электротехнической стали все же могут возникать. Вихревые токи, также называемые токами Фуко, вступают в игру при изменении магнитного поля. Прокатка стали до более тонкой толщины контролирует эти вихревые токи и снижает потери тока. Это особенно верно для частот приложений, превышающих стандартные 50 или 60 герц.
Сохранение ротора и статора как можно ближе друг к другу
Благодаря точному производству производители могут удерживать ротор и статор как можно ближе друг к другу, не касаясь друг друга.Когда скорость вращения достигает нескольких тысяч оборотов в минуту, электротехническая сталь в роторе может испытывать огромные нагрузки. Высокое напряжение особенно ощущается в областях вблизи пазов для магнитов, где узкое оборудование удерживает магниты на месте.
В асинхронных двигателях передача энергии происходит через воздушный зазор между статором и двигателем. Воздушный зазор необходим для минимизации сопротивления. Небольшой воздушный зазор приведет к меньшим потерям энергии и повышению эффективности.Суммарная магнитная связь между статором и ротором увеличивается по мере уменьшения воздушного зазора. Более высокая потокосцепление приводит к уменьшению потерь энергии и повышению эффективности. Меньший зазор также помогает избежать шума.
Больше катушек делают двигатели более эффективными
Провода в фазных катушках двигателей малой мощности тоньше. Однако количество витков катушки должно быть большим, чтобы увеличить магнитодвижущую силу или плотность тока. Сопротивление фазных обмоток и плотность потерь мощности также выше, чем у двигателей большой мощности.Следовательно, маломощные двигатели с высокими скоростями потребуют большей магнитодвижущей силы. Это означает, что потребуется больше катушек и большее количество витков с тонким проводом, который обеспечивает более высокую плотность тока.
Использование частотно-регулируемых приводов
Приводы с регулируемой скоростью (VSD) или приводы с регулируемой скоростью — это тяжелые промышленные электродвигатели. Их скорость можно регулировать с помощью внешнего контроллера. Эти приводы используются для управления технологическим процессом, так как они помогают экономить энергию на предприятиях, где используется множество электродвигателей.
VSD обычно используются в качестве энергосберегающих насосов и вентиляторов, поскольку они улучшают технологические операции, особенно там, где необходимо регулирование потока. Они также обеспечивают возможность плавного пуска, что снижает электрические напряжения и провалы напряжения в сети, которые обычно встречаются при пусках электродвигателей под напряжением, особенно при работе с высокоинерционными нагрузками.
Как пользователи электродвигателей могут обеспечить эффективность
Как упоминалось ранее, то, как электродвигатели используются производителями, промышленными предприятиями и домовладельцами, будет определять их эффективность.Ниже приведены некоторые конкретные шаги, которые пользователи могут предпринять для обеспечения эффективности и долговечности двигателя:
Использование интеллектуальных двигателей с соответствующим пускателем / контроллером двигателя
Хотя интеллектуальные двигатели широко используются и доступны, крайне важно выбрать наиболее подходящий вариант, чтобы минимизировать время простоя, повысить эффективность и снизить затраты. Промышленные инженеры знают, какое бремя потребления электроэнергии двигателями может сказаться на их эксплуатационных расходах. Чтобы смягчить это, они часто используют технологии управления двигателями, которые используют только необходимое количество энергии для запуска двигателей, выявления диагностических данных и сокращения времени простоя.По мере того как пускатели двигателей становятся все более популярными, технология пускателей двигателей также приобретает все большее значение.
Ниже приведены несколько важных вопросов, которые следует рассмотреть перед принятием решения о потенциальных областях применения электродвигателей:
Будет ли приложение требовать управления скоростью, даже если двигатель работает на определенной скорости?
Требования к контролю скорости должны быть определены как можно раньше. Некоторые устройства плавного пуска имеют ограниченное управление низкой скоростью между пуском и остановкой.Важно помнить, что рабочую скорость двигателя нельзя изменить, потому что устройство плавного пуска регулирует только напряжение двигателя, а не частоту.
Потребуется ли приложению определенное время запуска и остановки?
Обычно время пуска и останова устройств плавного пуска зависит от нагрузки. Внутренние алгоритмы регулируют напряжение на основе заранее запрограммированного времени, чтобы увеличить ток и крутящий момент для запуска двигателя и / или уменьшить их, чтобы остановить его.Если нагрузка небольшая, двигателю может потребоваться меньше времени для запуска, чем запрограммированное значение. В устройствах плавного пуска нового поколения используются усовершенствованные алгоритмы, обеспечивающие более точное и менее зависимое от нагрузки время запуска и остановки.
Потребуется ли приложению полный крутящий момент без скорости?
ЧРП могут лучше всего работать с приложениями, требующими полного крутящего момента при нулевой скорости. Они могут создавать номинальный крутящий момент двигателя от нуля до номинальной скорости и даже обеспечивать полный крутящий момент без скорости.С другой стороны, устройства плавного пуска обычно работают в диапазоне частот от 50 до 60 Гц, а полный крутящий момент может быть достигнут только при полном напряжении. Начальный крутящий момент (доступный при нулевой скорости) обычно составляет от нуля до 75 процентов и может быть запрограммирован.
Потребуется ли в приложении постоянный крутящий момент?
Устройства плавного пуска изменяют напряжение для управления током и крутящим моментом. Во время запуска ток изменяется в зависимости от напряжения, а крутящий момент двигателя изменяется как квадрат приложенного напряжения.Крутящий момент может не оставаться постоянным при различных приложенных напряжениях, условие, которое может усложняться при изменении нагрузки.
Некоторые устройства плавного пуска работают по алгоритмам управления крутящим моментом, но это не обязательно связано с постоянным крутящим моментом. Однако во время ускорения частотно-регулируемые приводы используют разные частоты двигателя при изменении напряжения. Режим управления VFD определяется с точки зрения постоянного напряжения на герц и обеспечивает постоянный крутящий момент.
Каковы стоимость, размер и тепловые характеристики?
При силе тока менее 40 ампер устройства плавного пуска могут предложить небольшую экономическую выгоду по сравнению с частотно-регулируемыми приводами.По мере увеличения силы тока и мощности стоимость частотно-регулируемых приводов увеличивается быстрее, чем у устройств плавного пуска, и может достигать экстремальных значений при высоких значениях силы тока.
Что касается размера, устройства плавного пуска имеют преимущество перед частотно-регулируемыми приводами при любой силе тока благодаря своей конструкции. По мере увеличения тока и мощности разница может увеличиваться. Когда устройства плавного пуска объединены с внутренним или внешним электромеханическим байпасом, они еще более эффективны и могут выделять меньше тепла. Это связано с тем, что устройства плавного пуска имеют меньше активных компонентов в цепи в режимах запуска, работы и останова.
Что следует учитывать при установке и гармониках?
Проблемы с установкой можно разделить на стоимость, размер, температуру и качество электроэнергии. Установки плавного пуска требуют меньших размеров и меньших затрат, поэтому они не вызывают особого беспокойства.
Кроме того, гармоники устройства плавного пуска меньше, чем у частотно-регулируемых приводов. Длинные кабели для ЧРП требуют большего внимания, чем для устройств плавного пуска. Кроме того, для устройств плавного пуска могут не потребоваться специальные типы проводов.Электромагнитная совместимость также может не учитываться.
Прекратите использование двигателей, когда в этом нет необходимости
Как бы просто это ни звучало, наиболее эффективный способ экономии энергии — выключать двигатель, когда он не используется. Чаще всего пользователи не решаются выключить двигатель, потому что считают, что его многократный запуск приведет к значительному износу. Один из способов смягчить это — использовать устройства плавного пуска, которые могут снизить износ.Правильно установленное и специально подобранное устройство плавного пуска также может снизить нагрузку на механические и электрические системы.
Снижение износа
Снижение износа двигателя — одна из основных задач пользователей. При запуске электродвигателя происходит значительный износ, так как высокие начальные токи и силы создают давление в механических и электрических системах. Хотя это может быть вредным, повреждающие эффекты можно контролировать с помощью устройств плавного пуска.Вы также можете использовать VSD, но это может быть дорого и менее эффективно.
Использование высокоэффективных двигателей
Эффективность двигателя может быть получена из двух факторов: размера двигателя и качества его эффективности. В частности, для двигателей меньшего размера размер является важным фактором, влияющим на эффективность. Для более мощных двигателей большее значение имеют классы эффективности.
Энергоэффективные двигатели потребляют меньше электроэнергии, не так легко нагреваются и служат дольше.Эти типы двигателей отличаются улучшенной конструкцией, что приводит к меньшим тепловым потерям и снижению шума. Использование высококачественных материалов, более жестких допусков и улучшенных технологий производства также помогает снизить потери и повысить эффективность.
Чтобы оценить преимущества высокоэффективных двигателей, вы должны сначала определить «эффективность» электродвигателя. Это можно определить по соотношению механической мощности, выдаваемой двигателем (выход), к электрической мощности, подаваемой на двигатель (вход).Следовательно, КПД = (выходная механическая мощность / потребляемая электрическая мощность) x 100 процентов.
Таким образом, если двигатель эффективен на 80 процентов, он может преобразовывать 80 процентов электрической энергии в механическую. Остальные 20 процентов электроэнергии теряется в виде тепла.
Покупка двигателя подходящего размера
Двигатели, как правило, наиболее эффективны при нагрузке от 60 до 100 процентов от их полной номинальной нагрузки и наиболее неэффективны при нагрузке ниже 50 процентов.Это означает, что простая покупка двигателя правильного размера может в значительной степени повысить эффективность.
Обычно двигатели увеличенного размера работают с нагрузкой ниже 50% от номинальной, что не только делает их неэффективными, но и более дорогими по сравнению с двигателями нужного размера. Кроме того, они также могут уменьшить подачу электроэнергии на машину, что увеличивает нагрузку на электрическую систему.
Последние мысли
Поскольку «энергоэффективность» становится современной модной фразой, важно, чтобы эта концепция была интегрирована в повседневные бытовые и промышленные применения.Энергоэффективные двигатели могут предложить множество преимуществ. При правильной установке они могут охлаждаться, обеспечивать более высокие стандарты обслуживания, дольше служить, обеспечивать лучшую изоляцию и меньше шума и вибрации. Имея такое множество преимуществ, производители двигателей поступят мудро, если будут производить и использовать наиболее энергоэффективные двигатели.
Эта статья ранее появлялась на сайте www.powerjackmotion.com.
.