Типовые схемы пуска синхронных электродвигателей | Полезные статьи
На сегодняшний день использование синхронных двигателей получило широкое распространение в сфере производства оборудования, работающего с постоянной скоростью, которое применяется в разных сферах человеческой деятельности. В связи с этим, существует несколько способов запуска синхронных электродвигателей, наиболее распространенные варианты которых будут представлены ниже.
Способы пуска синхронного электродвигателя
Способы пуска синхронного электродвигателя достаточно сложны, в этом заключается один из основных недостатков электродвигателей данного типа. Запуск синхронных электродвигателей осуществляется либо посредством воздействия вспомогательного пускового двигателя, либо с помощью асинхронного пуска. Рассмотрим каждый из способов в отдельности.
Асинхронный пуск синхронного электродвигателя
Асинхронный пуск синхронного электродвигателя предполагает расположение дополнительной короткозамкнутой обмотки в полюсных наконечниках полюсов ротора.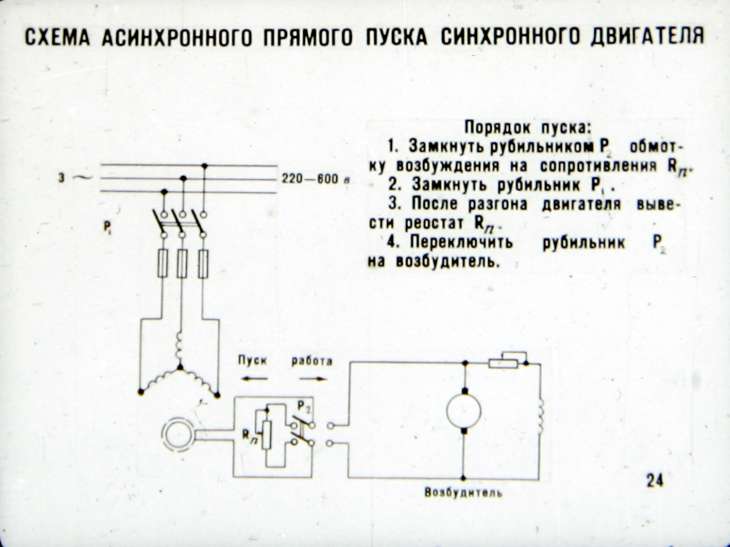
Действие этих токов в сочетании с вращающимся полем статора, запускают во вращение ротор, который постепенно набирает обороты. Достигнув 95-97% количества оборотов рубильник (2) ротора переходит в состояние, которое вынуждает обмотку ротора включить сеть постоянного напряжения.
Асинхронный пуск синхронного электродвигателя не лишен недостатков, точнее сказать, недостатка, которым является большой пусковой ток, который по значению может превышать в 7 раз рабочий ток. Столь высокое значение пускового тока является причиной падения напряжения в сети, что негативно сказывается на функционировании других потребителей энергии.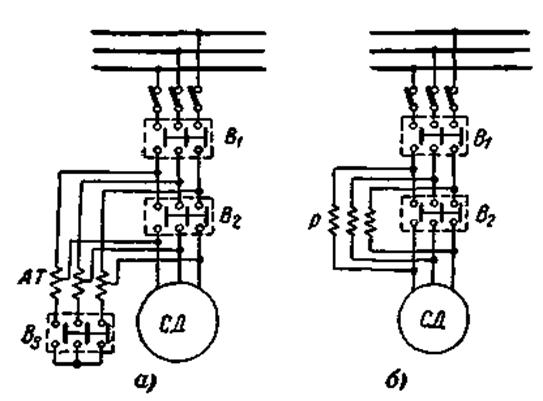 Одним из наиболее распространенных вариантов решения упомянутого недостатка является использование автотрансформатора для понижения напряжения, а также использование тиристорных возбудителей для пуска синхронных электродвигателей, которые отличаются высоким К.П.Д. Именно высокое значение К.П.Д. во многом определило выбор тиристорных возбудителей в качестве комплектов большей части выпускаемых синхронных электродвигателей крупных размеров. К тому же, применение тиристорных возбудителей позволяет автоматизировать процесс подачи возбуждения синхронному двигателю. Автоматизация может быть реализована 2-мя способами: подача возбуждения синхронному двигателю в функции скорости и подача возбуждения синхронному двигателю в функции тока. При этом контроль подачи возбуждения синхронному двигателю в функции тока осуществляется с помощью реле тока.
Одним из наиболее распространенных вариантов решения упомянутого недостатка является использование автотрансформатора для понижения напряжения, а также использование тиристорных возбудителей для пуска синхронных электродвигателей, которые отличаются высоким К.П.Д. Именно высокое значение К.П.Д. во многом определило выбор тиристорных возбудителей в качестве комплектов большей части выпускаемых синхронных электродвигателей крупных размеров. К тому же, применение тиристорных возбудителей позволяет автоматизировать процесс подачи возбуждения синхронному двигателю. Автоматизация может быть реализована 2-мя способами: подача возбуждения синхронному двигателю в функции скорости и подача возбуждения синхронному двигателю в функции тока. При этом контроль подачи возбуждения синхронному двигателю в функции тока осуществляется с помощью реле тока.
На сегодняшний момент именно асинхронный пуск синхронных двигателей получил наибольшее распространение, так как его достаточно просто реализовать, а работает он крайне надежно.
Пуск синхронного двигателя при помощи вспомогательного двигателя
Пуск синхронного двигателя при помощи вспомогательного двигателя предполагает запуск синхронного электродвигателя благодаря работе другого двигателя, работа которого позволяет ротору синхронного двигателя развернуть полюса, осуществляя дальнейшее вращение совершенно самостоятельно. Чтобы запуск произошел, нужно создать условия, при которых количество пар полюсов асинхронного двигателя было бы меньше количества пар полюсов синхронного двигателя. Порядок запуска синхронного двигателя предполагает включение рубильника (3), пуск вспомогательного асинхронного двигателя (2), осуществляющего разворот ротора синхронного двигателя (1) до скорости, которая соответствует скорости поля статора. Далее включаются полюсы ротора после включения рубильника (4). При включении синхронного двигателя в сеть трехфазного тока, требуется синхронизация, осуществляемая реостатом (5). Реостат организует возбуждение, позволяющее установить напряжение обмотки статора, определяемое вольтметром V, равное напряжению в сети, которое указывает вольтметр V1.
При разомкнутом рубильнике лампы (6), расположенные параллельно ножам рубильника (7), буду мигать. По мере того, как будет меняться скорость ращения вспомогательного асинхронного двигателя, лампы будут постепенно начинать мигать все реже, пока все они не погаснут в раз. Это сигнал того, что синхронный двигатель пора включать в сеть трехфазного тока рубильником (7). Так как ротор двигателя далее может вращаться без помощи, то вспомогательный двигатель (2) пора отключать от сети посредством рубильника (3).
Это сложная процедура, являющаяся самым главным недостатком такого варианта асинхронного электродвигателя, что определяет крайне редкие случаи ее практической реализации.
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту [email protected] с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Способы пуска и схемы подключения синхронного двигателя | ASUTPP
Синхронные электрические машины обладают рядом преимуществ в сравнении с другими типами агрегатов. Но в то же время, включать их напрямую в сеть под нагрузку нельзя. Поэтому в данной статье мы рассмотрим способы пуска и схемы подключения синхронного двигателя.
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки.
 При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия. - Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
 При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Асинхронный реакторный пускАсинхронный реакторный пуск
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
Асинхронный автотрансформаторный пускАсинхронный автотрансформаторный пуск
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора.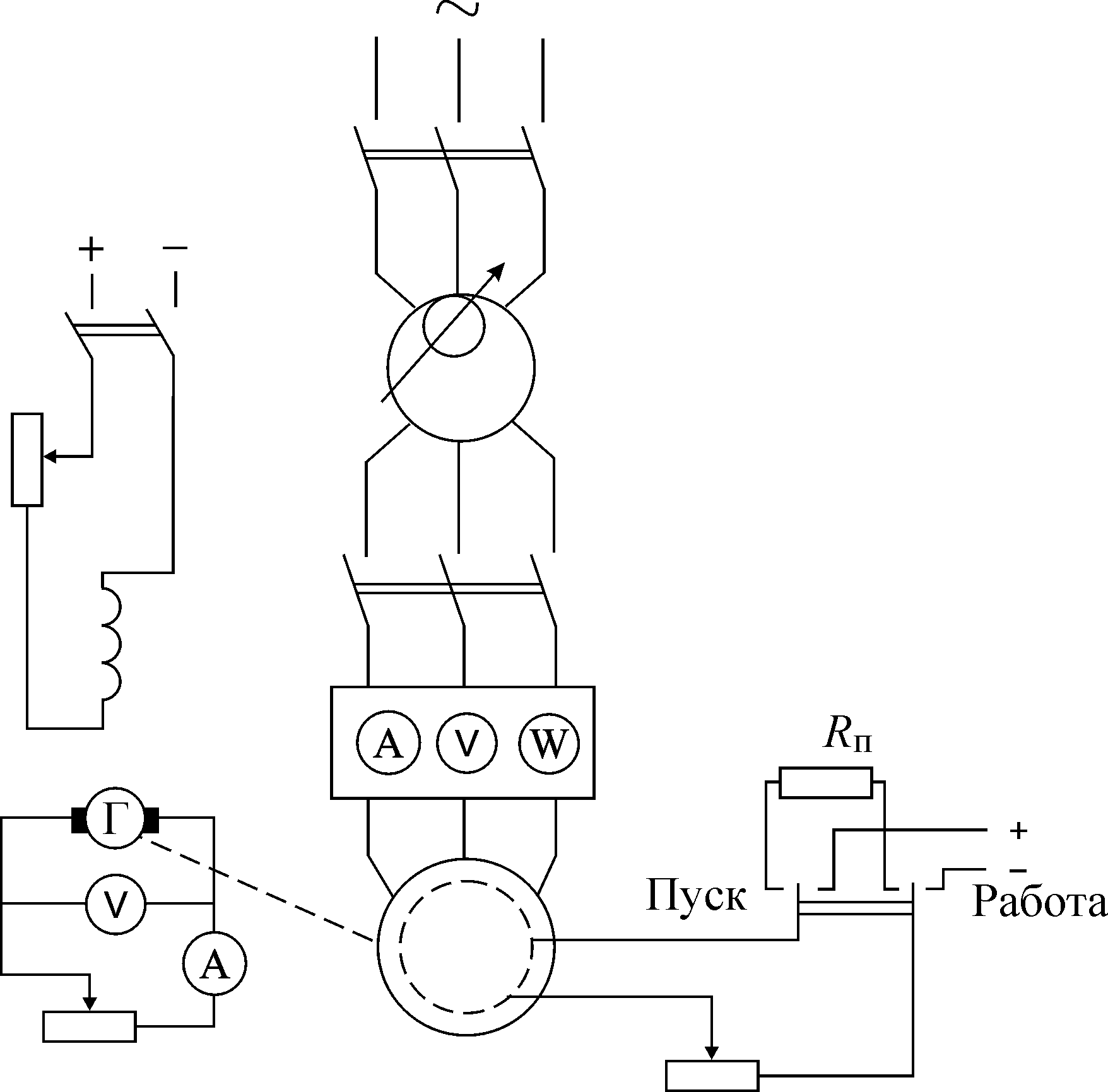 Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Преобразование частотыПреобразование частоты
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Схема частотного пуска синхронного двигателяСхема частотного пуска синхронного двигателя
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Еще больше деталей смотрите в нашем видео ниже:
или в статье на нашем сайте: https://www.asutpp.ru/princip-raboty-sinxronnogo-dvigatelya.html
Пуск синхронных двигателей
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Основной проблемой прямого пуска становится подключение нескольких электродвигателей к маломощной подстанции или генератору.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора.
Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя.
В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
Применение сопротивления при пуске
Метод применим для асинхронных двигателей, подключаемых к однофазной сети, и имеющих первичную дополнительную обмотку с короткозамкнутым ротором. Так называют мотор с расщепленной фазой, электроцепь которого имеет высокое активное сопротивление.
Чтобы пустить в ход двигатель, питаемый от однофазной сети, необходим пусковой резистор, соединяемый последовательно с дополнительной намоткой. Тогда сдвиг фаз составляет 30 градусов. Этого хватает для разгона. Ниже представлена схема, согласно которой достигается омический сдвиг фаз.
Вместо резистора можно применить дополнительную обмотку высокого сопротивления, но низкой индуктивности. В этом случае намотка имеет мало витков, которые выполняются из провода меньшего сечения в отличие от того, что используется для рабочей намотки.
В России с конвейера выходят моторы, подключаемые к однофазной сети, оснащенные резистором для сдвига фаз. Их мощность варьируется в диапазоне 18-600 Вт. Двигатели рассчитаны для сетей с напряжением 127, 220 или 380 Вольт и переменным током с частотой 50 Гц.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время
Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий
Реакторный пуск
В этом случае двигатель пускается при пониженном напряжении сети с помощью реактора или трансформатора.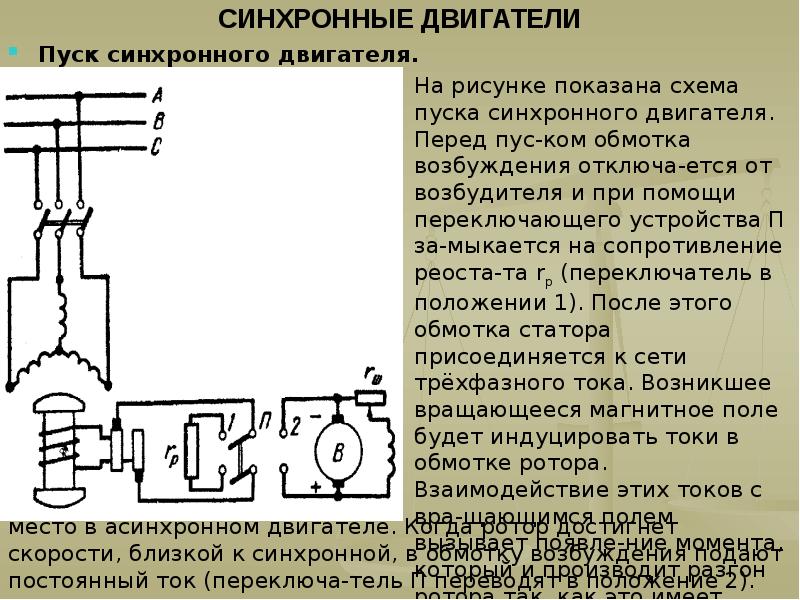 Реакторный пуск рекомендуется в первую очередь и только при невозможности его использования допу-скается автотрансформаторный пуск.
Реакторный пуск рекомендуется в первую очередь и только при невозможности его использования допу-скается автотрансформаторный пуск.
Реакторный пуск синхронных компенсаторов ( рис. 5 — 1 ж), принятый сейчас как основной, применен для мощных машин.
Реакторный, или автотрансформаторный, пуск осуществляется подачей на обмотки электродвигателей напряжения, сниженного с помощью автотрансформатора или чаще всего реактора, которые отключаются при разгоне агрегата до подсин-хронной частоты вращения. При реакторных пусках снижаются момент, развиваемый двигателем при пуске, толчки и вибрации машины, потребляемая мощность, нагрев обмоток и падение напряжения и увеличивается время пуска.
Конденсаторный или реакторный пуск.
Пуск электродвигателей серии ВДС 325 — прямой асинхронный от сети, имеющей полное напряжение. Электродвигатели ВДС 325 имеют реакторный пуск от сети с пониженным напряжением.
Трехфазный асинхронный двигатель с кратностью начального пускового тока kj 5 6 и кратностью начального пускового момента kn — 1 3 пускается в ход при нагрузке Мв 0 5 Мн. Применим ли в этом случае реакторный пуск.
Дают возможность регулировании напряжения. При до-статичнои мощности подстанции возможен реакторный пуск или непосредственный пуск от шип.
Схема электрических соединений насосной станции должна обеспечивать прямой пуск асинхронных и синхронных электродвигателей от полного напряжения сети. Для мощных электродвигателей в соответствии с указаниями заводов-изготовителей может применяться реакторный пуск. Использование крупных синхронных электродвигателей для работы в компенсаторном режиме в перерывах водоподачи должно быть обосновано технико-экономическими расчетами.
Вспомогательная схема токовых цепей защит электродвигателей с реакторным пуском от многофазных КЗ.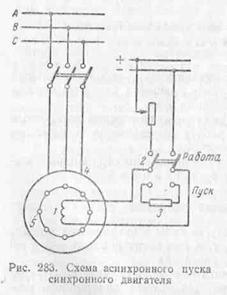 а — при применении токовой отсечки. б — при применении дифференциальной защиты. М — электродвигатель. L — пусковой реактор. Ql, Q2 — выключатели. ТА1 — ТАЗ — трансформаторы тока. АК1, АК2 — комплекты токовых отсечек. АК — комплект дифференциальной защиты.| Принципиальная схема дифференциальной защиты электродвигателя М с реле. а — при применении токовой отсечки. б — при применении дифференциальной защиты. М — электродвигатель. L — пусковой реактор. Ql, Q2 — выключатели. ТА1 — ТАЗ — трансформаторы тока. АК1, АК2 — комплекты токовых отсечек. АК — комплект дифференциальной защиты.| Принципиальная схема дифференциальной защиты электродвигателя М с реле. |
Если применена дифференциальная защита, то в плече защиты со стороны питания с той же целью устанавливается двухфазная двухрелейная отсечка без выдержки времени, которая для повышения чувствительности выводится из действия на время пуска электродвигателя. На рис. 2.192 показаны блок-схемы токовых цепей защит электродвигателей с реакторным пуском.
Пуск синхронных компенсаторов осуществляется различными способами: асинхронный — непосредственно от сети, от разгонного двигателя, через автотрансформатор и через реактор; асинхронный пуск применяется только при малых мощностях компенсаторов. Наиболее простым способом пуска, чаще всего применяемым на практике, является реакторный пуск компенсатора. Синхронные компенсаторы типа КС до 30 000 ква включительно имеют воздушное охлаждение, а компенсатор типа КСВ-37500 ква — водородное охлаждение.
Наиболее простым способом пуска, чаще всего применяемым на практике, является реакторный пуск компенсатора. Синхронные компенсаторы типа КС до 30 000 ква включительно имеют воздушное охлаждение, а компенсатор типа КСВ-37500 ква — водородное охлаждение.
| Прямая ( а и обратная ( б схемы включения пусковых автотрансформаторов. |
Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
| Схема пуска синхронного двигателя с реактором. |
Все аппараты управления синхронным двигателем размещаются на станциях управления. На рис. 39 показан общий вид фасада станции управления ПН7028 для синхронных двигателей с реакторным пуском. Кроме аппаратов, перечисленных при описании схемы пуска синхронного двигателя СТМ-4000-2, на станции управления показаны приборы и аппараты, применяемые в управлении двигателей.
Кроме аппаратов, перечисленных при описании схемы пуска синхронного двигателя СТМ-4000-2, на станции управления показаны приборы и аппараты, применяемые в управлении двигателей.
Синхронные мини-мотор-редукторы 220 В ZHENGKE MOTOR
Синхронные двигатели с редуктором 220 В
Предлагаем малогабаритные синхронные мини-мотор-редукторы с питанием от сети переменного тока 220 В. Синхронный двигатель простой по своей конструкции, надежный и доступный по цене, редукторы для таких моторов, как правило, также недорогие. Скорость вращения ротора синхронного мотора равна частоте питающего напряжения. Такие электродвигатели могут использоваться как без редуктора (50 об/мин для сети 50 Гц), так и с редуктором, что позволяет получить достаточно малые скорости на выходе редуктора при небольших передаточных числах. Мы поставляем и поддерживаем на складе синхронные мотор-редукторы компании ZHENGKE MOTOR, очень хорошо зарекомендовавшие себя по качеству. Мотор-редукторы могут использоваться вместо отечественных синхронных двигателей с редуктором типа СД-54 и других, ранее производившихся в нашей стране.
Мотор-редукторы могут использоваться вместо отечественных синхронных двигателей с редуктором типа СД-54 и других, ранее производившихся в нашей стране.
Применение синхронных двигателей с редуктором
Мотор-редукторы используются в различном полиграфическом оборудовании, в рекламных конструкциях, в малогабаритных поворотных столиках, вращателях рекламных материалов, в ламинаторах, генераторах льда, в спортивных тренажерах, в мини-приборах, в осветительном оборудовании. Также находят свое применение малогабаритные синхронные моторы в бытовой техничке — микроволновых печах, посудомоечных машинах, в автоматизированных грилях, машинах для производства попкорна, электрических каминах и т.д. Везде, где требуется вращение с постоянной малой скоростью и небольшой нагрузкой, синхронный двигатель с редуктором незаменим и очень привлекателен по цене.
Схема подключения синхронного двигателя
Синхронные двигатели с редуктором разных производителей могут иметь различные варианты подключения. Для моторов ZHENGKE, которые мы предлагаем, выведены из корпуса обе обмотки двигателя — кроме серии 49TYZ. Направление вращения возможно изменять подачей питающего напряжения в разные точки схемы. Для серии 49TYZ есть два варианта исполнения — либо вращение с постоянной скоростью только в одном из двух направлений (только по часовой стрелке (CW) или только против часовой стрелки (CCW), указывается при заказе) либо вращение поочередно — то в одном направлении, то в другом (CW/CCW). При последнем варианте направление вращения переключается механически (за счет редуктора). Если мотор-редуктор делает полный оборот, то при следующем выключении и включении направление вращения изменяется на противоположное. Такая схема подходит для задач, где не важно направление вращения, но нужно его поочередно изменять, например, в микроволновке. Электрически определять направление невозможно, из мотора выходят только два вывода.
Для моторов ZHENGKE, которые мы предлагаем, выведены из корпуса обе обмотки двигателя — кроме серии 49TYZ. Направление вращения возможно изменять подачей питающего напряжения в разные точки схемы. Для серии 49TYZ есть два варианта исполнения — либо вращение с постоянной скоростью только в одном из двух направлений (только по часовой стрелке (CW) или только против часовой стрелки (CCW), указывается при заказе) либо вращение поочередно — то в одном направлении, то в другом (CW/CCW). При последнем варианте направление вращения переключается механически (за счет редуктора). Если мотор-редуктор делает полный оборот, то при следующем выключении и включении направление вращения изменяется на противоположное. Такая схема подходит для задач, где не важно направление вращения, но нужно его поочередно изменять, например, в микроволновке. Электрически определять направление невозможно, из мотора выходят только два вывода.
Купить маломощные синхронные мотор-редукторы с доставкой по России
Приобрести мини-мотор-редукторы с доставкой вы можете, заказав нужные модели через корзину товаров или написав нам на почту, также у нас работает бесплатная горячая телефонная линия для клиентов, звонок на номер бесплатный для звонков из России. Для каждой модели синхронного двигателя с редуктором у нас в каталоге есть подробное описание, чертежи, существенные технические характеристики, фото, отзывы и другая полезная информация. Все очень удобно для выбора подходящего вам варианта. Помогут при выборе мотор-редуктора фильтры, которые расположены в левой части каталога — цена, наличие, мощность, скорость вращения выходного вала редуктора и др.
Синхронный двигатель. Пуск синхронного двигателя.
Конструкция синхронного двигателя такая же, как и у синхронного генератора. При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой: n = 60 f / p, где f — частота тока питающей сети, р — число пар полюсов на статоре.
Принцип действия синхронного двигателя
Ротор, зачастую являющийся электромагнитом, будет строго следовать за вращающимся магнитным полем, то есть его частота вращения n2 = n1. Рассмотрим принцип действия синхронного двигателя на следующей условной модели (рис. 1). Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N — S.
Принцип действия синхронного двигателя
Рис. 1
Ротор двигателя тоже представляет собой систему электромагнитов S — N, которые сцеплены с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора (θ = 0). Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол θ. Однако магнитное сцепление ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2 = n1). При больших значениях ротор может выйти из сцепления и двигатель остановится.
Главное преимущество синхронного двигателя перед асинхронным — это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
Пуск синхронного двигателя
Как мы показали выше, синхронное вращение ротора обеспечивается магнитным сцеплением полюсов ротора с вращающимся магнитным полем статора. В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо разогнать до подсинхронной скорости каким-то дополнительным устройством.
Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным. Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм. Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу.
Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой. В последнее время используется так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя.
Система асинхронного пуска синхронного двигателя
Рис. 2
В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем — как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику постоянного тока.
Исследование системы управления шестифазным синхронным двигателем с постоянными магнитами на основе прогнозирующей модели
Please use this identifier to cite or link to this item: http://earchive.tpu.ru/handle/11683/59986
| Title: | Исследование системы управления шестифазным синхронным двигателем с постоянными магнитами на основе прогнозирующей модели |
| Authors: | Рахим, Ари Абдулла Рахим |
| metadata.dc.contributor.advisor: | Кладиев, Сергей Николаевич |
| Keywords: | прогнозирование; электропривод; синхронный двигатель; инвертор; постоянный магнит; prediction; electric drive; synchronous motor; inverter; permanent magnet |
| Issue Date: | 2020 |
| Citation: | Рахим А. Р. Исследование системы управления шестифазным синхронным двигателем с постоянными магнитами на основе прогнозирующей модели : научный доклад / А. Р. Рахим ; Национальный исследовательский Томский политехнический университет (ТПУ), Управление магистратуры, аспирантуры и докторантуры (УМАД), Отдел аспирантуры и докторантуры (ОАиД) ; науч. рук. С. Н. Кладиев. — Томск, 2020. |
| Abstract: | В работе приведены результаты исследования модели с прогнозирующим управлением шестифазным синхронным двигателем с постоянными магнитами. Предложенный алгоритм нелинейной оптимизации позволяет целенаправленно выбирать оценивающую функцию показателя качества управления для отслеживания контроль-ных значений управляемых переменных токов статора, сохраняя заданные ограничения. Представлена математи-ческая модель шестифазного синхронного двигателя и схема подключения обмоток статора к инверторам. Presents study of model predictive control of permanent magnets synchronous motor. The proposed nonlinear optimization algorithm allows to purposefully select the cost function for tracking control values of controlled variable stator currents, while maintaining the specified restrictions. A mathematical model of six-phase synchronous motor and a connection of the stator windings to inverters are presented. |
| URI: | http://earchive.tpu.ru/handle/11683/59986 |
| Appears in Collections: | Научные доклады |
Items in DSpace are protected by copyright, with all rights reserved, unless otherwise indicated.
Синхронный двигатель — производство и работа
Синхронный двигатель и асинхронный двигатель — наиболее широко используемые типы двигателей переменного тока. Конструкция синхронного двигателя аналогична генератору переменного тока. Такая же синхронная машина может использоваться как синхронный двигатель или как генератор переменного тока. Синхронные двигатели доступны в широком диапазоне, обычно мощностью от 150 кВт до 15 МВт со скоростью от 150 до 1800 об / мин.Конструкция синхронного двигателя
Конструкция синхронного двигателя (с явнополюсным ротором) показана на рисунке слева.Как и любой другой двигатель, он состоит из статора и ротора. Сердечник статора изготовлен из тонкой кремниевой пластинки и изолирован поверхностным покрытием, чтобы минимизировать потери на вихревые токи и гистерезис. Внутри статора имеются осевые пазы, в которых размещена трехфазная обмотка статора. Статор намотан трехфазной обмоткой на определенное количество полюсов, равное полюсам ротора.Ротор синхронных двигателей в основном является явнополюсным. Питание постоянного тока на обмотку ротора подается через контактные кольца.Постоянный ток возбуждает обмотку ротора и создает электромагнитные полюса. В некоторых случаях также можно использовать постоянные магниты. На рисунке выше очень кратко показана конструкция синхронного двигателя .
Работа синхронного двигателя
Статор намотан на такое же количество полюсов, что и ротор, и питается от трехфазного источника переменного тока. Трехфазный источник переменного тока создает вращающееся магнитное поле в статоре. Обмотка ротора питается от источника постоянного тока, который намагничивает ротор.Рассмотрим двухполюсную синхронную машину , как показано на рисунке ниже.- Теперь полюса статора вращаются с синхронной скоростью (скажем, по часовой стрелке). Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первой схеме на рисунке выше), то полюса статора и ротора будут отталкиваться друг от друга, и создаваемый крутящий момент будет против часовой стрелки .
- Полюса статора вращаются с синхронной скоростью, они вращаются очень быстро и меняют свое положение.Но очень скоро ротор не сможет вращаться на тот же угол (из-за инерции), и следующая позиция, вероятно, будет второй схемой на приведенном выше рисунке. В этом случае полюса статора будут притягивать полюса ротора, и создаваемый крутящий момент будет по часовой стрелке.
- Следовательно, на ротор будет действовать быстро меняющийся крутящий момент, и двигатель не запустится.
Характерные особенности синхронного двигателя
- Синхронный двигатель будет работать либо с синхронной скоростью, либо не будет работать вообще.
- Единственный способ изменить его скорость — это изменить его частоту питания. (Поскольку Ns = 120f / P)
- Синхронные двигатели не запускаются автоматически. Им нужна некоторая внешняя сила, чтобы приблизить их к синхронной скорости.
- Могут работать с любым коэффициентом мощности, как отстающим, так и опережающим. Следовательно, синхронные двигатели могут использоваться для улучшения коэффициента мощности.
Применение синхронного двигателя
- Поскольку синхронный двигатель может работать как с опережающим, так и с запаздывающим коэффициентом мощности, его можно использовать для улучшения коэффициента мощности. Синхронный двигатель без нагрузки с опережающим коэффициентом мощности подключается к энергосистеме, в которой нельзя использовать статические конденсаторы.
- Используется там, где требуется высокая мощность при низкой скорости.Такие как прокатные станы, измельчители, смесители, насосы, насосы, компрессоры и т. Д.
— однофазные / трехфазные двигатели переменного / постоянного тока
Обозначения электродвигателей переменного / постоянного тока, однофазные и трехфазные
Список всех символов электродвигателей на одном изображении приведен ниже в качестве ссылки на конец этого поста.
Обмотка / катушка электродвигателя
Этот символ представляет обмотку или катушку электродвигателя.Обмотка внутри двигателя создает необходимое магнитное поле при возбуждении электрическим током.
Обмотка серии
Обмотка возбуждения, подключенная последовательно к обмотке якоря двигателя, называется последовательной обмоткой. Ток, потребляемый в таком двигателе, огромен, так как он работает последовательно и производит довольно большой крутящий момент.
Шунтирующая обмотка
Обмотка возбуждения, подключенная параллельно обмотке якоря двигателя, называется шунтирующей обмоткой.Сопротивление шунтирующей обмотки обычно велико, чтобы предотвратить протекание сильного тока.
Угольная щетка
Это компонент внутри электродвигателя, который передает электрический ток между статором (неподвижная часть) и ротором (вращающаяся часть). Обычно он сделан из графита, и его можно заменить во время технического обслуживания после износа.
Стандартный двигатель
Это обозначение общего электродвигателя, используемого в электрических схемах.Двигатель преобразует электрическую энергию в механическую.
Двухскоростной двигатель
Этот символ обозначает двухскоростной двигатель. Такой тип двигателей имеет две отдельные обмотки для разного передаточного числа. Каждая обмотка одновременно обеспечивает разную скорость и крутящий момент.
Двигатель переменного тока
Этот символ представляет двигатель переменного тока. Этот тип двигателя работает только от переменного тока. Он преобразует электрическую энергию переменного тока в механическую.
Двигатель постоянного тока
Этот символ используется для обозначения двигателя постоянного тока на любой электрической схеме. Он преобразует электрическую энергию постоянного тока в механическую. Работает только на постоянном токе.
Линейный двигатель
Это общий символ, используемый для обозначения линейного двигателя. Линейный двигатель имеет развернутый статор, что приводит к созданию линейной силы вместо вращающего момента.
Шаговый двигатель
Шаговый двигатель или шаговый двигатель — это тип бесщеточного двигателя постоянного тока, полное вращение которого делится на количество равных шагов.Он вращается пошагово, а не непрерывно. Они используются для точного позиционирования с помощью управляющего сигнала.
Электрическая машина
Этот тип символа используется для таких машин, которые могут использоваться как в качестве двигателя, так и генератора. Двигатель преобразует электрическую энергию в механическую, а генератор — наоборот.
Двигатель постоянного тока с постоянным магнитом
В бесщеточных двигателях постоянного тока такого типа для создания полюсов вместо обмоток возбуждения используется постоянный магнит.Символ выше представляет двигатель постоянного тока со значком магнита, обозначающим тип постоянного магнита.
Однофазный двигатель переменного тока
Этот символ обозначает однофазный двигатель переменного тока. Он работает от однофазного источника переменного тока, и его обмотка возбуждения включена последовательно с обмоткой якоря. Он также известен как модифицированный двигатель постоянного тока.
Двигатель постоянного тока
Двигатель постоянного тока, обмотка возбуждения которого включена последовательно с обмоткой якоря, называется двигателем постоянного тока, и на схематических изображениях он обозначен этим символом.
Однофазный асинхронный двигатель переменного тока с выведенными клеммами обмотки
Он также известен как асинхронный двигатель с расщепленной фазой. Этот тип однофазного двигателя переменного тока имеет доступную отдельную обмотку, известную как пусковая обмотка, имеющая высокое сопротивление. Пусковая обмотка используется для пуска двигателя.
Однофазный отталкивающий двигатель
Это однофазный двигатель переменного тока, работающий по принципу отталкивания магнитного поля статора и ротора.Магнитное поле ротора создается индуцированным током и может вращаться, вращая щетки вдоль своей оси. Это вращающееся магнитное поле используется для изменения направления двигателя.
Параллельный двигатель постоянного тока
Это обозначение, используемое для параллельного двигателя постоянного тока, обмотка возбуждения которого подключена параллельно обмотке якоря. Обе обмотки подключены к общему источнику постоянного тока.
Однофазный синхронный двигатель
Этот символ обозначает однофазный синхронный двигатель переменного тока.Синхронные двигатели сначала запускаются как асинхронные, но позже достигают синхронной скорости, которая зависит только от входной частоты питания.
Двигатель с комбинированным возбуждением постоянного тока
Двигатель постоянного тока такого типа имеет как последовательную обмотку возбуждения, так и шунтирующую (или параллельную) обмотку возбуждения. Обмотка шунтирующего поля усиливает магнитное поле, создаваемое последовательной обмоткой. он имеет преимущества как двигателей постоянного тока с последовательной обмоткой, так и двигателей постоянного тока с параллельной обмоткой, то есть высокий пусковой крутящий момент и регулирование скорости.
Трехфазный двигатель переменного тока
Это общий символ, используемый для трехфазного двигателя переменного тока. Трехфазный источник переменного тока создает вращающееся магнитное поле, которое реагирует с магнитным полем, создаваемым ротором, таким образом вращая ротор.
Трехфазный двигатель в форме звезды
Это трехфазный двигатель, обмотки которого соединены вместе по схеме звезды или звезды. этот символ также обозначает функцию автоматического запуска двигателя.
Трехфазный двигатель с ротором
Этот символ обозначает двигатель с трехфазным ротором. Это тип трехфазного двигателя переменного тока, ротор которого соединен с внешним сопротивлением через контактные кольца. Преимущество двигателя с фазным ротором заключается в том, что он генерирует высокий пусковой момент при меньшем токе.
Трехфазный линейный двигатель
Этот символ представляет линейный двигатель, работающий от трехфазного источника питания переменного тока. Статор такого двигателя раскручивается для создания линейной силы вместо вращающего момента.
На следующем изображении показаны все символы электрических двигателей.
Сопутствующие электрические / электронные символы:
На главную | Toshiba International Corporation
Подразделение Motors & Drives предлагает полный спектр двигателей низкого и среднего напряжения и приводов с регулируемой скоростью. Эти продукты, отличающиеся качеством, производительностью и долговечностью, могут быть адаптированы для самых требовательных приложений.
Нажмите здесь, чтобы увидеть все наши двигатели и приводы>
Подразделение силовой электроники предлагает решения по кондиционированию и защите питания, которые выделяются системами бесперебойного питания, быстро перезаряжаемыми батареями (SCiB ® ), а также предприятия по кондиционированию электроэнергии.Продукция TIC Power Electronics славится своей надежностью и эффективностью и идеально подходит для таких ключевых рынков, как центры обработки данных, здравоохранение и промышленность. Клиенты получают выгоду от компактного дизайна, обширных гарантийных планов, а также круглосуточного обслуживания и поддержки.
Щелкните здесь, чтобы увидеть все наши продукты для силовой электроники>
Подразделение передачи и распределения со штаб-квартирой в Хьюстоне является частью мирового лидерства Toshiba Corp. в области поставки интегрированных решений для передачи, распределения энергии и интеллектуальных сообществ.Как один из крупнейших в мире производителей современного передающего и распределительного оборудования, Toshiba уже более века поставляет на мировой рынок высоконадежные и инновационные продукты. Подразделение передачи и распределения TIC обслуживает рынок Северной Америки, предлагая продукцию, которая удовлетворяет рыночный спрос на большую емкость, компактный дизайн и экологически безопасные решения, обеспечивающие впечатляющие показатели эффективности и отличные результаты.
Щелкните здесь, чтобы увидеть все наши продукты для передачи и распределения>
Доступные системы социальной инфраструктуры могут быть дополнительно настроены путем добавления контрольно-измерительных приборов, систем управления процессами или программируемых логических элементов управления.Кроме того, TIC предлагает решения для транспортных систем, безопасности и автоматизации, а также двигатели для гибридных электромобилей.
С 2011 года Toshiba International Corporation производит высокопроизводительные приводные двигатели для гибридных электромобилей (HEV). Современный завод HEV занимает площадь 45 000 квадратных футов и производит более 130 000 двигателей в год. Завод, на котором работают более 100 человек, поставляет двигатели и генераторы для гибридных электромобилей, включая модели Ford Fusion Hybrid и C-Max.
Нажмите здесь, чтобы увидеть все наши автомобильные системы>
Инструкции для твердотельных щеточных контроллеров синхронных двигателей Ampgard Mark V
% PDF-1.3 % 65 0 объект >>> эндобдж 76 0 объект > поток 11.08.5122018-07-21T16: 54: 41.784-04: 00 Акробат Дистиллер 3.02 18.000-05: 00приложение / pdf2018-07-21T17: 00: 25.369-04: 00
-} kD% dA ^ Nw & Ͳ.4a
% PDF-1.7 % 2275 0 объект > эндобдж xref 2275 103 0000000016 00000 н. 0000003738 00000 н. 0000003921 00000 н. 0000003958 00000 н. 0000004096 00000 н. 0000004307 00000 н. 0000005022 00000 н. 0000005126 00000 н. 0000005444 00000 н. 0000009236 00000 п. 0000009703 00000 п. 0000010076 00000 п. 0000013166 00000 п. 0000013749 00000 п. 0000014040 00000 п. 0000017439 00000 п. 0000017858 00000 п. 0000018256 00000 п. 0000018803 00000 п. 0000018975 00000 п. 0000019636 00000 п. 0000019904 00000 п. 0000023475 00000 п. 0000023893 00000 п. 0000024269 00000 п. 0000024326 00000 п. 0000024715 00000 п. 0000024924 00000 п. 0000025212 00000 п. 0000025857 00000 п. 0000033901 00000 п. 0000034425 00000 п. 0000034537 00000 п. 0000161486 00000 н. 0000399432 00000 н. 0000399493 00000 н. 0000399595 00000 н. 0000399701 00000 н. 0000399817 00000 н. 0000399949 00000 н. 0000400075 00000 н. 0000400199 00000 п. 0000400367 00000 н. 0000400531 00000 н. 0000400681 00000 п. 0000400833 00000 н. 0000400983 00000 п. 0000401155 00000 н. 0000401275 00000 н. 0000401443 00000 н. 0000401567 00000 н. 0000401707 00000 н. 0000401895 00000 н. 0000402013 00000 н. 0000402129 00000 н. 0000402305 00000 н. 0000402415 00000 н. 0000402541 00000 н. 0000402737 00000 н. 0000402897 00000 н. 0000403027 00000 н. 0000403153 00000 п. 0000403322 00000 п. 0000403448 00000 н. 0000403624 00000 н. 0000403754 00000 н. 0000403900 00000 н. 0000404034 00000 н. 0000404168 00000 п. 0000404298 00000 н. 0000404418 00000 н. 0000404554 00000 н. 0000404716 00000 н. 0000404854 00000 н. 0000405034 00000 н. 0000405188 00000 п. 0000405320 00000 н. 0000405486 00000 н. 0000405628 00000 н. 0000405768 00000 н. 0000405924 00000 н. 0000406078 00000 н. 0000406242 00000 н. 0000406384 00000 п. 0000406584 00000 н. 0000406718 00000 н. 0000406860 00000 н. 0000406996 00000 н. 0000407170 00000 н. 0000407286 00000 н. 0000407446 00000 н. 0000407610 00000 п. 0000407752 00000 н. 0000407874 00000 н. 0000408032 00000 н. 0000408180 00000 п. 0000408326 00000 н. 0000408472 00000 н. 0000408614 00000 н. 0000408740 00000 н. 0000408852 00000 н. 0000408982 00000 п. 0000002356 00000 п. трейлер ] / Назад 2
2 >> startxref 0 %% EOF 2377 0 объект > поток h T {LSWa) + pvjGZ84PXucrWB «a: 7t96 / (874dq Ӛt $ k ‘= s.
ECE 449 — Лаборатория 7: Синхронизация генератора
Цели
- Попрактиковаться в разработке эксперимента
- Для получения V-образной кривой холостого хода синхронного двигателя
Теория
Ненагруженные синхронные двигатели используются параллельно с приемным концом линии передачи для улучшения регулирования линейного напряжения. Двигатель при правильном возбуждении поля может действовать как конденсатор на своей входной стороне и, таким образом, потреблять ведущий ток для компенсации запаздывающего тока, принимаемого индуктивной нагрузкой.V-образная кривая синхронного двигателя показывает соотношение между токами якоря в виде ординат и токами возбуждения в виде абсцисс, когда двигатель работает с постоянной потребляемой мощностью при номинальном напряжении на клеммах. Семейство V-образных кривых может быть получено для данного двигателя, соблюдая приведенные выше соотношения для ряда значений постоянной потребляемой мощности.
Входная мощность трехфазного синхронного двигателя равна P = 3 VIcosφ. , и если P поддерживается постоянным, а V, естественно, постоянным, потому что двигатель подключен к источнику питания, из этого следует, что для любой заданной V-образной кривой, если I изменяется, cos φ также должен измениться.Минимальная точка V-образной кривой соответствует условию единичного коэффициента мощности (pf). Двигатель выглядит как индуктивная нагрузка, если ток возбуждения меньше значения, соответствующего минимальной точке на V-образной кривой; и он проявляется как емкостная нагрузка для токов возбуждения выше этого.
Эквивалентная схема для каждой фазы показана на рис. 1 без учета сопротивления якоря. Ê af — наведенная обратная ЭДС из-за магнитного потока, создаваемого током ротора I f .Если насыщенностью пренебречь, тогда Ê af пропорционален I f . V a — это приложенное напряжение на каждую фазу, обычно принимаемое за эталон. Угол Ê af с V a — это угол поворота δ. Другое выражение мощности, передаваемой двигателю: P = 3 (V a Ê af / X) sin (δ). На рис.2 показано, что при увеличении Ê af (за счет увеличения тока возбуждения) и при постоянной мощности отрицательный угол коэффициента мощности увеличивается (менее отрицательный), затем становится равным нулю, а при дальнейшем увеличении тока возбуждения угол становится равным положительный, т.е. двигатель потребляет отрицательную добротность (подает добротность в сеть). Ê
Рис. 1. Эквивалентная схема на фазу синхронной машины.Рис. 2. Фазорные диаграммы для различных возбуждений и константы
власть синхронного двигателя.
Из рисунка выше и из того, что вы узнали в курсе преобразования энергии, должно быть ясно, что для постоянного P, заданного двигателю, ток якоря зависит от тока возбуждения.Когда двигатель потребляет реактивную мощность, коэффициент мощности отстает, а ток якоря велик (рис. 2.a). По мере увеличения тока возбуждения коэффициент мощности увеличивается, угол pf становится меньше (но все еще отрицательным), а ток якоря уменьшается. Для определенного тока возбуждения угол pf равен нулю, а ток якоря наименьший для определенного P. Увеличение тока возбуждения приведет к опережению pf, двигатель будет подавать Q, и ток якоря снова начнет увеличиваться.
Цель этого эксперимента — получить график зависимости тока якоря (ось y) от тока возбуждения (ось x).
Процедура
- Используя двигатель-генератор мощностью 10 л.с. (DC-AC), который вы использовали в эксперименте по синхронизации генератора, спланируйте эксперимент, чтобы получить V-образную кривую для малонагруженной синхронной машины.
- Ваша конструкция должна включать схему для измерения трехфазной мощности, подаваемой на двигатель переменного тока, с использованием имеющихся разъемов и оборудования.
- Привод генератора постоянного тока с помощью синхронного двигателя, соединенного звездой. Организуйте измерение ватт, вольт и ампер на входе двигателя, тока возбуждения двигателя, а также V и I на выходе генератора постоянного тока.
- Изучите характеристики двигателя, генератора постоянного тока и нагрузки, затем выберите несколько уровней входной мощности, до которых вы получите V-образные кривые.
- Измените ток возбуждения синхронного двигателя и измерьте If и Ia. Наблюдайте, когда Ia становится минимальным, и снимите несколько показаний выше и ниже этого минимального значения.
- Отключите питание двигателя и подключите резистивную нагрузку к генератору постоянного тока.
- Измените входную мощность синхронного двигателя, изменив резистивную нагрузку и / или реостат возбуждения цепи возбуждения генератора постоянного тока.
- Для каждой нагрузки измерьте входную мощность, входной ток, ток возбуждения двигателя, выходной постоянный ток и напряжение.
Принципиальная схема
Нарисуйте подробные электрические схемы.
Отчет
- Постройте график зависимости тока линии от тока возбуждения для синхронного двигателя для случая холостого хода.
- Что происходит с V-образной кривой при нагрузке на синхронный двигатель?
- Объясните, как эту машину можно использовать для корректировки коэффициента мощности трехфазной отстающей нагрузки.
- Обсудить методы пуска трехфазных синхронных двигателей.
- Покажите с помощью векторов, почему коэффициент мощности на входе синхронного двигателя изменяется в зависимости от тока возбуждения.
- Желательно установить синхронный двигатель для повышения коэффициента мощности асинхронного двигателя с нагрузкой 1500 киловатт со средним коэффициентом мощности 0,8 с запаздыванием. Если синхронный двигатель должен заменить часть нагрузки асинхронного двигателя и должен работать с опережающим коэффициентом мощности 0,7, то какое значение кВА синхронного двигателя требуется, чтобы довести коэффициент мощности полной нагрузки до 0,9 с запаздыванием? Какие асинхронные двигатели кВА заменяются на синхронные, если у замененных асинхронных двигателей средний коэффициент мощности равен 0.7 отстает?
[PDF] Глава 6. Синхронные машины
1 48550 Электроэнергетика Глава 6. Синхронные машины Темы для обсуждения: 1) Введение 2) Синхронный мак …
48550 ЭлектроэнергетикаГлава 6. Синхронные машины Темы для обсуждения: 1) Введение
4) Модель эквивалентной схемы
2) Структуры синхронных машин
5) Работа в качестве генератора
3) Вращающееся магнитное поле
6) Характеристики двигателя
Введение Синхронная машина — это вращающаяся машина переменного тока, скорость которой в установившемся режиме пропорциональна частоте тока в ее якоре.Магнитное поле, создаваемое токами якоря, вращается с той же скоростью, что и поле, создаваемое током поля на роторе, который вращается с синхронной скоростью, и в результате получается постоянный крутящий момент. Синхронные машины обычно используются в качестве генераторов, особенно для крупных энергетических систем, таких как турбогенераторы и гидроэлектрические генераторы в электросети. Поскольку скорость ротора пропорциональна частоте возбуждения, синхронные двигатели могут использоваться в ситуациях, когда требуется привод с постоянной скоростью.Поскольку реактивная мощность, генерируемая синхронной машиной, может регулироваться путем управления величиной тока возбуждения ротора, ненагруженные синхронные машины также часто устанавливаются в энергосистемах исключительно для коррекции коэффициента мощности или для управления реактивным потоком в кВА. Такие машины, известные как синхронные конденсаторы, могут быть более экономичными при больших размерах, чем статические конденсаторы. Синхронные двигатели, особенно с роторами с постоянными магнитами, широко используются с источниками питания с силовой электронной системой переменного напряжения и частотой (VVVF) для приводов с регулируемой скоростью.Если возбуждение статора двигателя с постоянными магнитами регулируется положением его ротора таким образом, что поле статора всегда находится на 90o (электрическое) впереди ротора, характеристики двигателя могут быть очень близки к характеристикам обычных щеточных двигателей постоянного тока, что очень предпочтительно. для частотно-регулируемых приводов. Положение ротора можно определить с помощью датчиков положения ротора или рассчитать по наведенной ЭДС в обмотках статора. Поскольку для двигателей этого типа не требуются щетки, они известны как бесщеточные двигатели постоянного тока.
Синхронные машины
В этой главе мы сосредоточимся на обычных синхронных машинах, тогда как бесщеточные двигатели постоянного тока будут рассмотрены позже в отдельной главе.
Конструкции синхронных машин Статор и ротор Обмотка якоря обычной синхронной машины почти всегда находится на статоре и обычно представляет собой трехфазную обмотку. Обмотка возбуждения обычно находится на роторе и возбуждается постоянным током или постоянными магнитами.
Источник постоянного тока, необходимый для возбуждения
, обычно подается через генератор постоянного тока, известный как возбудитель, который часто устанавливается на том же валу, что и синхронная машина.Различные системы возбуждения с использованием возбудителя переменного тока и твердотельных выпрямителей используются с большими турбогенераторами. Существует два типа конструкций ротора: круглый или цилиндрический ротор и ротор с явнополюсным ротором, как схематично показано на диаграмме ниже. Как правило, конструкция с круглым ротором используется для высокоскоростных синхронных машин, таких как паротурбинные генераторы, в то время как конструкция с явным полюсом используется для низкоскоростных приложений, таких как гидроэлектрические генераторы. На рисунках ниже показаны статор и ротор гидроэлектрического генератора и ротор турбогенератора.
(а)
(б)
Схематическое изображение синхронных машин с (а) круглым или цилиндрическим ротором и (б) выступающими роторными структурами
2
Синхронные машины
3
Синхронные машины
Угол в Электрические и механические устройства. Рассмотрим синхронную машину с двумя магнитными полюсами.
Идеализированное радиальное
распределение плотности потока в воздушном зазоре синусоидально вдоль воздушного зазора. Когда ротор вращается на один оборот, индуцированная ЭДС, которая также является синусоидальной, изменяется в течение одного цикла, как показано на диаграмме ниже.Если мы измеряем положение ротора в физических или механических градусах или радианах, а фазовые углы плотности потока и ЭДС в электрических градусах или радианах, в этом случае мы готовы увидеть, что угол, измеренный в механических градусах или радианах, равен который измеряется в электрических градусах или радианах, то есть
θ = θm, где θ — угол в электрических градусах или радианах, а θm — механический угол.
4
Синхронные машины
B (θ) & e (ω t) B (θ) e (ω t)
B (θ) & e (ω t) B (θ) e (ω t)
0
π / 2
π π
3 π / 2
2π
2π
θm θ & ωt
0
π
π
2π
3π
2π 4π
θm θ & ωt
(a) (b) Распределение плотности потока в воздушном зазоре и наведенная ЭДС в фазной обмотке двухполюсной (a) и четырехполюсной (b) синхронной машины (b) Многие синхронные машины имеют более двух полюсов.В качестве конкретного примера рассмотрим четырехполюсную машину. Когда ротор вращается на один оборот (θm = 2π), наведенная ЭДС изменяется в течение двух циклов (θ = 4π), и, следовательно,
θ = 2θm В общем случае, если машина имеет P полюсов, соотношение между электрическими и механические единицы угла могут быть легко выведены как
θ =
P θ 2 м
Взяв производные с обеих сторон вышеприведенного уравнения, мы получаем
ω =
P ω 2 м
5
Синхронные машины
где ω — угловая частота ЭДС в электрических радианах в секунду, а ωm — угловая скорость ротора в механических радианах в секунду.Когда ω и ωm преобразуются в циклы в секунду или Гц и обороты в минуту соответственно, мы имеем
P n 2 60 120 fn = P f =
или
, где ω = 2πf, ωm = 2πn / 60 и n скорость ротора в об / мин. Видно, что частота наведенной ЭДС пропорциональна скорости вращения ротора. Распределенные трехфазные обмотки Статор синхронной машины состоит из многослойного сердечника из электротехнической стали и трехфазной обмотки. На рис. (А) ниже показана пластина статора синхронной машины, которая имеет ряд равномерно распределенных пазов.Катушки должны быть уложены в эти пазы и подключены таким образом, чтобы ток в каждой фазной обмотке создавал магнитное поле в воздушном зазоре вокруг периферии статора, как можно ближе к идеальному синусоидальному распределению. Рис. (B) — изображение катушки.
(a) (b) Фотографии (a) пластинки статора и (b) катушки синхронной машины Как показано ниже, эти катушки соединены в трехфазную обмотку. Каждая фаза способна создавать определенное количество магнитных полюсов (на диаграмме ниже четыре магнитных полюса генерируются фазной обмоткой).Обмотки трех фаз расположены равномерно по периферии статора и помечены в такой последовательности, что фаза a на 120o (электрическая) опережает фазу b и на 240o (электрическая) опережает фазу c. Отмечено, что на схемах выше в каждый паз уложены две стороны катушки. Этот тип обмотки известен как
6
Синхронные машины
двухслойная обмотка. В случае, когда в каждом пазу имеется только одна сторона катушки, обмотка называется однослойной обмоткой.
7
Синхронные машины
Вращающиеся магнитные поля Магнитное поле распределенной фазовой обмотки Распределение магнитного поля распределенной фазовой обмотки может быть получено путем сложения полей, генерируемых всеми катушками обмотки. На диаграмме ниже показаны профили mmf и напряженности поля одиночной катушки в однородном воздушном зазоре. Если предположить, что проницаемость железа бесконечна, по закону Ампера, mmf через каждый воздушный зазор будет Nia / 2, где N — количество витков катушки и, помимо прочего, ток в катушке.Распределение МДС вдоль воздушного зазора представляет собой прямоугольную волну. Из-за равномерного воздушного зазора пространственное распределение напряженности магнитного поля такое же, как у mmf. Аналитически можно показать, что фундаментальная составляющая является основной составляющей, когда квадратная волна mmf разложена в ряд Фурье, и ее можно записать как
Fa1 =
4 Ni a cosθ π 2
, где θ — угловое смещение от магнитной оси катушки. Когда распределения поля нескольких распределенных катушек объединены, результирующее распределение поля близко к синусоиде, как показано на диаграмме на следующей странице.Фундаментальный компонент результирующего mmf может быть получен путем сложения основных компонентов этих отдельных катушек, и его можно выразить как
8
Синхронные машины
9
Синхронные машины
Fa1 =
4 kp N ph i cosθ π P a
, где Nph — общее количество витков фазной обмотки, образованной этими катушками, kp известен как коэффициент распределения обмотки, который определяется как
kp =
Фундаментальный mmf распределенная обмотка Фундаментальный ммс сосредоточенной обмотки
и P — количество полюсов.В некоторых обмотках катушки с коротким шагом (расстояние между двумя сторонами катушки меньше, чем расстояние между двумя соседними магнитными полюсами) используются для устранения определенной гармоники, и основная составляющая результирующего mmf выражается как
Fa1 =
4 квт N ph i cosθ π P a
где kw = kdkp — коэффициент намотки, kd известен как коэффициент тангажа, который определяется как
kd =
Фундаментальный mmf обмотки с коротким шагом Фундаментальный mmf обмотки полный шаг обмотки
икВт / ч известно как эффективное число витков фазной обмотки.Пусть ia = I m cosωt, и мы имеем
4 квт N ph I m cos ωt cosθ π P = Fm cos ωt cosθ 4 квт N ph Fm = Im π P Fa 1 =
где
MMF распределенной фазовая обмотка зависит как от пространства, так и от времени. При построении графика в разные моменты времени, как показано ниже, мы видим, что это пульсирующая синусоида. Мы называем этот тип ММЖ пульсирующим ММЖ. Поскольку cos α cos β =
cos (α — β) + cos (α + β), приведенное выше выражение основной составляющей mmf 2
может быть далее записано как
Fm F cos (θ — ωt) + m cos (θ + ωt) 2 2 = F + + F−
Fa 1 =
10
Синхронные машины
Можно показать, что первый член в приведенном выше уравнении означает вращение mmf в направлении + θ и второй — вращающийся mmf в направлении -θ.То есть пульсирующий MMF можно разделить на два вращающихся MMF с одинаковыми величинами и противоположными направлениями вращения, как показано выше. Для машины с однородным воздушным зазором приведенный выше анализ также применим к напряженности магнитного поля и плотности потока в воздушном зазоре.
11
Синхронные машины
Магнитное поле трехфазных обмоток Как только мы получим выражение mmf для однофазной обмотки, нетрудно записать выражения mmf для трех однофазных обмоток, расположенных на расстоянии 120 ° (электрические) друг от друга, и возбуждаемые сбалансированными трехфазными токами:
Fm F cos (θ — ωt) + m cos (θ + ωt) 2 2 oo Fb1 = Fm cos (ωt — 120) cos (θ — 120) Fa 1 = Fm cos ωt cosθ =
Fm F cos (θ — ωt) + m cos (θ + ωt — 240 o) 2 2 o Fc1 = Fm cos (ωt — 240) cos (θ — 240 o) =
и
=
Fm F cos (θ — ωt) + m cos (θ + ωt — 480 o) 2 2
Следовательно, результирующая mmf, генерируемая трехфазной обмоткой, равна
F1 = Fa 1 + Fb1 + Fc1 =
cos ( θ + ωt) + cos (θ + ωt — 240o) + cos (θ + ωt — 480 o) = 0
Обратите внимание, что
F1 t = 0
0
3Fm cos (θ — ωt) 2
ω
t = 2πω
π / 2
π
900 13 3 π / 2Вращение mmf в направлении + θ
12
2π
θ
Синхронные машины
На приведенной выше диаграмме показано результирующее mmf F1 в два конкретных момента времени: t = 0 и t = π / 2ω.Нетрудно заметить, что F1 — это вращающийся МДС в направлении + θ θ (a → → b → → c) с постоянной величиной 3Fm / 2. Скорость этого вращающегося mmf может быть рассчитана как
ωf =
π 2 dθ = = ω dt π 2ω
рад / с (электрическая)
При выражении в механических радианах в секунду и оборотах в минуту скорость вращающийся mmf может быть выражен как
ωf = и
nf =
ω P2 60ω f 2π
рад / с (механический)
=
120 f P
об / мин
соответственно.Опять же, для машины с однородным воздушным зазором приведенный выше анализ для mmf также действителен для напряженности магнитного поля и плотности магнитного потока в воздушном зазоре. Следовательно, скорость вращающегося магнитного поля пропорциональна частоте трехфазных токов возбуждения, которые генерируют поле. Сравнивая соотношение между скоростью ротора и частотой наведенной ЭДС в трехфазной обмотке, полученное ранее, мы можем обнаружить, что скорость ротора равна скорости вращающегося поля для данной частоты.Другими словами, ротор и вращающееся поле вращаются с одинаковой скоростью. Мы называем эту скорость синхронной скоростью и используем специальные символы ωsyn (механический рад / с) и nsyn (об / мин), чтобы обозначить ее. Вышеупомянутый аналитический вывод также может быть выполнен графически путем добавления векторов mmf трех фаз, как показано на диаграммах ниже. Когда ωt = 0, ток фазы a максимален, и вектор mmf с величиной Fm фазы a находится на магнитной оси фазы a, в то время как mmf фаз b и c имеют величину Fm / 2 и в противоположных направлениях. их магнитных осей, поскольку токи этих двух фаз равны −Im / 2.Следовательно, результирующее mmf F1 = 3Fm / 2 находится на магнитной оси фазы a. Когда ωt = π / 3, ic = −Im и ia = ib = Im / 2. Результирующий mmf F1 = 3Fm / 2 находится на оси фазы c, но в противоположном направлении. Аналогично, когда ωt = 2π / 3, ib = Im и ia = ic = −Im / 2. Следовательно, результирующий mmf F1 = 3Fm / 2 находится в положительном направлении магнитной оси фазы b. В общем, результирующий mmf имеет постоянную величину 3Fm / 2 и будет находиться в положительном направлении магнитной оси фазной обмотки, когда ток в этой фазной обмотке достигнет положительного максимума.Скорость вращающегося mmf равна угловой частоте в электрических рад / с.
13
Синхронные машины
14
Синхронные машины
В случае синхронного генератора три уравновешенных ЭДС с частотой f = Pn / 120 Гц индуцируются в трехфазных обмотках, когда ротор приводится в движение первичным движитель вращается со скоростью n. Если трехфазная цепь статора замкнута сбалансированной трехфазной электрической нагрузкой, сбалансированные трехфазные токи с частотой f будут течь в цепи статора, и эти токи будут генерировать вращающееся магнитное поле со скоростью nf = 120f / P = n.Когда обмотка статора трехфазного синхронного двигателя питается от сбалансированного трехфазного источника питания с частотой f, сбалансированные трехфазные токи в обмотке будут генерировать вращающееся магнитное поле со скоростью nf = 120f / P. Это вращающееся магнитное поле будет тянуть намагниченный ротор, который является важным магнитом, вращаться с той же скоростью n = nf. С другой стороны, этот вращающийся ротор также будет генерировать сбалансированные трехфазные ЭДС с частотой f в обмотке статора, которые будут уравновешиваться с приложенным напряжением на клеммах.Магнитное поле ротора Используя метод наложения на МДС катушек, которые образуют обмотку ротора, мы можем вывести, что распределения МДС и, следовательно, плотности потока в воздушном зазоре близки к синусоидальным волнам для синхронной машины с круглым ротором с равномерный воздушный зазор, как показано ниже.
15
Синхронные машины
В случае ротора с явнополюсным ротором, полюса ротора имеют такую форму, чтобы результирующая ммс и плотность потока синусоидально распределялись в воздушном зазоре и, таким образом, индуцированная ЭДС в обмотках статора, связывающих это поток также будет синусоидальным.Возбуждение поля синхронной машины может быть обеспечено с помощью постоянных магнитов, что устраняет необходимость в источнике постоянного тока для возбуждения. Это может не только сэкономить энергию для магнитного возбуждения, но и значительно упростить конструкцию машины, что особенно удобно для небольших синхронных машин, поскольку это обеспечивает большую гибкость топологий машин. На приведенной ниже диаграмме показаны поперечные сечения двух синхронных машин с постоянными магнитами.
Модель фазовой эквивалентной электрической цепи На приведенной ниже схеме схематически показано поперечное сечение трехфазной двухполюсной синхронной машины с цилиндрическим ротором.Катушки aa ‘, bb’ и cc ‘представляют собой распределенные обмотки статора, создающие синусоидальные волны магнитной индукции и плотности потока, вращающиеся в воздушном зазоре. Контрольные направления для токов показаны точками и крестиками. Обмотка возбуждения ff ‘на роторе также представляет собой распределенную обмотку, которая создает синусоидальные волны магнитной индукции и магнитной индукции, центрированные на его магнитной оси и вращающиеся вместе с ротором. Уравнения электрической цепи для трех фазных обмоток статора могут быть записаны по закону напряжения Кирхгофа как
va = Ra ia +
dλa dt
16
Синхронные машины
Магнитная ось фазы b
Φ ca Φ aao
Φ ba Магнитная ось фазы c
Принципиальная схема трехфазной синхронной машины с цилиндрическим ротором
dλb dt dλc vc = Rc ic + dt vb = Rb ib +
где va, vb и vc — напряжения на обмотки, Ra, Rb и Rc — сопротивления обмоток, а λa, λb и λc — суммарные потокосцепления обмоток фаз a, b и c соответственно.Для симметричной трехфазной обмотки статора имеем
Ra = Rb = Rc Потоковые связи фазных обмоток a, b и c можно выразить через собственную и взаимную индуктивность следующим образом:
λa = λaa + λab + λac + λaf = Laa ia + Lab ib + Lac ic + Laf, если λb = λba + λbb + λbc + λbf = Lba ia + Lbb ib + Lbc ic + Lbf, если λc = λca + λcb + λcc + λcf = Lca ia + Lcb ib + Lcc ic + Lcf, если где
Laa = Lbb = Lcc = Laao + Lal Lab = Lba = Lac = Lca = — Laao 2 Laf = Lafm cosθ Lbf = Lafm cos (θ — 120 o)
17
Синхронные машины
Lcf = Lafm cos (θ — 240 o) для сбалансированной трехфазной машины, Laao = Φaao / ia, Lal = Φal / ia, Φaao — это поток, который связывает все три фазные обмотки, Φal — поток, который только связывает фазу обмотки и θ = ωt + θo.Когда обмотки статора возбуждаются сбалансированными трехфазными токами, мы имеем
ia + ib + ic = 0. Суммарная потокосцепление фазы обмотки может быть далее записано как
λa = (Laao + Lal) ia — Laao ib / 2 — Лаао ic / 2 + Лафми f cos (ωt + θo) = (Лаао + Лал) ia — Лаао (ib + ic) / 2 + Лафми f cos (ωt + θo) = (Лаао + Лал) ia + Лаао ia / 2 + Lafmi f cos (ωt + θo)
= (3 Laao 2 + Lal) ia + Lafmi f cos (ωt + θo)
= Ls ia + Lafmi f cos (ωt + θo) Аналогично можно записать
λb = Ls ib + Lafmi f cos (ωt + θo — 120 o)
и
λc = Ls ic + Lafmi f cos (ωt + θo — 240 o)
где Ls = 3Laao / 2 + Lal известная как синхронная индуктивность.Таким образом, трехфазные обмотки математически развязаны, и, следовательно, для сбалансированной трехфазной синхронной машины нам просто нужно решить уравнение цепи для одной фазы. Подставляя приведенное выше выражение потоковой связи в уравнение цепи фазы a, мы получаем
va = Ra ia + Ls
dia dλaf + dt dt
В установившемся режиме приведенное выше уравнение может быть выражено в терминах напряжения и тока. векторов как
Va = E a + (Ra + jωLs) I a = E a + (Ra + jX s) I a
X s = ωLs называется синхронным реактивным сопротивлением, а ωLafm I f 2π Ea = j = j fk w N ph Φ f = j 4.44 fk w N ph Φ f 2 2 — вектор наведенной ЭДС с учетом того, что Lafm I f = λafm = kw N ph Φ f, If — постоянный ток в
, где
— обмотка ротора, а Φf — магнитный поток ротора. в воздушном зазоре.
18
Синхронные машины
Следует отметить, что приведенное выше уравнение схемы было получено в предположении, что фазный ток протекает через положительный вывод, то есть опорное направление фазного тока было выбрано в предположении, что машина является двигателем.В случае генератора, где предполагается, что фазный ток вытекает из положительного вывода, уравнение схемы принимает следующий вид:
Va = E a — (Ra + jX s) I a
Следующие принципиальные схемы иллюстрируют по фазе схемы замещения синхронной машины с круглым ротором в двигательном и генераторном режимах соответственно.
jXs
Ra
Ea
jXs
Ia
Ra
Ea
Va
(a)
Ia
VA
(b) Эквивалентные схемы синхронной машины на фазу (a) генератор, и (b) опорные направления двигателя
Экспериментальное определение параметров цепи В модели эквивалентной схемы для каждой фазы, показанной выше, необходимо определить три параметра: сопротивление обмотки Ra, синхронное реактивное сопротивление Xs и наведенная ЭДС в фазной обмотке. Эа.Фазное сопротивление обмотки Ra может быть определено путем измерения сопротивления обмотки постоянному току с помощью вольт-амперного метода, в то время как синхронное реактивное сопротивление и наведенная ЭДС могут быть определены путем испытаний на обрыв цепи и короткое замыкание.
Тест на разрыв цепи Приведите синхронную машину в движение с синхронной скоростью, используя первичный двигатель, когда обмотки статора разомкнуты. Измените ток обмотки ротора и измерьте напряжение на клеммах обмотки статора. Взаимосвязь между напряжением на клеммах обмотки статора и током возбуждения ротора, полученным при испытании на обрыв цепи, известна как характеристика обрыва цепи синхронной машины.
19
Синхронные машины
Проверка короткого замыкания Уменьшите ток возбуждения до минимума, используя реостат возбуждения, а затем разомкните прерыватель цепи возбуждения. Замкните клеммы статора машины на три амперметра; Замкните выключатель цепи возбуждения; и увеличить ток возбуждения до значения, отмеченного при испытании на обрыв цепи, при котором напряжение на клеммах холостого хода равно номинальному напряжению, при сохранении синхронной скорости. Запишите три тока статора.(Это испытание следует проводить быстро, поскольку токи статора могут быть больше номинального значения).
При предположении, что синхронное реактивное сопротивление Xs и наведенная ЭДС Ea имеют одинаковые значения как при испытаниях на обрыв, так и на короткое замыкание, и что Xs >> Ra, мы имеем
Xs =
Обрыв цепи на фазное напряжение Короткое замыкание на фазный ток
Для некоторых машин ток короткого замыкания слишком велик, если машина работает с синхронной скоростью.В этом случае испытание на короткое замыкание может быть выполнено на пониженной скорости, например, на полусинхронной скорости nsyn / 2 или frated / 2. Поскольку Ea ∝ f, наведенная ЭДС при испытании на короткое замыкание уменьшается вдвое. Таким образом,
Xs
f номинальный / 2
1 Voc = 2 I sc f
f рейтинг
рейтинг
/2
Следовательно,
Xs
f рейтинг
= 2 × X s
f номинальная / 2
20
=
Voc I sc
f номинальная f номинальная / 2
Синхронные машины
Синхронная машина, работающая как генератор Электромагнитная мощность и крутящий момент Когда синхронная машина работает как генератор, для привода генератора требуется первичный двигатель.В установившемся режиме механический крутящий момент первичного двигателя должен уравновешиваться с электромагнитным крутящим моментом, создаваемым генератором, и крутящим моментом с механическими потерями из-за трения и ветра, или
Tpm = T + Tloss Умножение синхронной скорости на обе стороны крутящего момента Уравнение баланса мощности:
Ppm = Pem + Ploss
, где Ppm = Tpmωsyn — механическая мощность, подаваемая первичным двигателем, Pem = Tωsyn — электромагнитная мощность генератора, а Ploss = Tlossωsyn — механическая потеря мощности. системы.Электромагнитная мощность — это мощность, преобразующаяся в электрическую в трехфазных обмотках статора. То есть
Pem = Tω syn = 3E a I a cosϕ Ea Ia, где ϕEaIa — угол между векторами Ea и Ia.
jXs
Первичный двигатель
Ra
Ia
Tloss T Ea Generator
Tpm ωsyn
VA
Синхронная машина, работающая как генератор
Ea
Для больших синхронных генераторов сопротивление обмотки обычно очень велико. меньше, чем синхронное реактивное сопротивление, и, таким образом, уравнение для каждой фазы можно приблизительно записать как
jXs I a δ ϕ
Va
Ia
Va = E a — jX s I a Соответствующая векторная диаграмма показана на
21
Векторная диаграмма генератора
Синхронные машины
правая сторона.Из векторной диаграммы легко получить
E a sin δ = X s I a cosϕ. Если пренебречь сопротивлением фазной обмотки, выходная электрическая мощность равна электромагнитной мощности, или
Pem = Pout = 3Va I a cosϕ Следовательно ,
Pem =
3E aVa sinδ Xs
и
T =
Pem 3E aVa = sin δ ω syn ω syn X s
Зависимость электромагнитного момента от угла нагрузки
, где δ — угол между векторами напряжения и ЭДС, известного как угол нагрузки.Если пренебречь сопротивлением обмотки статора, δ можно также рассматривать как угол между вращающимися магнитными полями ротора и статора. Электромагнитный крутящий момент синхронной машины пропорционален синусоидальной функции угла нагрузки, как показано на диаграмме выше, где кривая в третьем квадранте соответствует ситуации, когда машина работает как двигатель, где электромагнитный крутящий момент равен отрицательный, потому что направление тока якоря обратное.
Регулировка напряжения Напряжение на клеммах при постоянном токе возбуждения зависит от тока якоря или тока нагрузки; то есть генератор имеет регулировку, которая становится более заметной по мере того, как цепь нагрузки становится более индуктивной и рабочий коэффициент мощности падает.Это регулирование определяется как
VR =
Va (NL) — Va (номинальное) Va (номинальное)
, где Va (NL) — величина напряжения на клеммах без нагрузки, а Va (номинальная) — величина номинальное напряжение на клеммах. Когда генератор выдает полную нагрузку, на требуемой клемме должно быть номинальное напряжение. Нормализованная разница между величинами напряжения холостого хода и напряжения полной нагрузки при номинальном напряжении определяется как регулировка напряжения. Это значение можно легко определить по векторной диаграмме для работы с полной нагрузкой.Если регулирование является чрезмерным, можно использовать автоматический контроль тока возбуждения для поддержания почти постоянного напряжения на клеммах при изменении нагрузки.
22
Синхронные машины
Синхронная машина, работающая как двигатель Электромагнитная мощность и крутящий момент Когда синхронная машина работает как двигатель для привода механической нагрузки в установившемся состоянии, механический крутящий момент двигателя должен уравновешивать момент нагрузки и крутящий момент с механическими потерями из-за трения и сопротивления воздуха, то есть
T = Tload + Tloss Умножая синхронную скорость на обе стороны уравнения крутящего момента, мы получаем уравнение баланса мощности как
Pem = Pload + Ploss, где Pem = Tωsyn Электромагнитная мощность двигателя, Pload = Tloadωsyn — это механическая мощность, передаваемая механической нагрузке, а Ploss = Tlossωsyn — потеря механической мощности в системе.Как и в случае с генератором, электромагнитная мощность — это количество энергии, преобразуемой из электрической в механическую. То есть
Pem = 3E a I a cosϕ Ea Ia = Tω syn, где ϕEaIa — угол между векторами Ea и Ia.
jXs
мех. Нагрузка
Ra
Ia
ωsyn T Ea
Va
Двигатель
Tload Tloss
Синхронная машина, работающая как двигатель
VA
Когда сопротивление обмотки статора игнорируется, уравнение для каждой фазы может быть приблизительно записывается как
Va = E a + jX s I a Соответствующая векторная диаграмма показана справа.Из векторной диаграммы можно легко получить
jXs I a δ ϕ Ia Векторную диаграмму двигателя
Va sin δ = X s I a cosϕ Ea Ia
где ϕ E a I a = ϕ — δ
23
Ea
Синхронные машины
Следовательно,
Pem =
3E aVa sinδ Xs
и
T =
Pem 3E aVa = sin δ ω syn ω syn X s
, где δ — угол нагрузки .
Когда сопротивление обмотки статора
игнорируется, δ можно также рассматривать как угол между вращающимися магнитными полями ротора и статора.
Зависимость электромагнитного момента от угла нагрузки
В двигательном режиме поле статора находится впереди ротора.
Электромагнитный момент
синхронной машины пропорционален синусоидальной функции угла нагрузки, как показано на диаграмме выше, где кривая в третьем квадранте соответствует ситуации, когда машина работает как генератор, где электромагнитный момент отрицательный, потому что направление тока якоря меняется на противоположное.
Коэффициент мощности синхронного двигателя Предположим, что синхронный двигатель приводит в движение нагрузку с постоянным крутящим моментом.Активная мощность, преобразуемая машиной, является постоянной, независимо от значения тока возбуждения, поскольку скорость двигателя постоянна. Таким образом,
T =
3Va E a sin δ = постоянная ω syn X s
E a sinδ = постоянная
или и
Pem = 3Va I a cosϕ = постоянная I a cosϕ = постоянная
или
Используя приведенную ниже векторную диаграмму, мы анализируем изменение угла коэффициента мощности синхронного двигателя при изменении возбуждения поля ротора.Для небольшого тока возбуждения ротора наведенная ЭДС в обмотке статора также мала, как показано вектором Ea1. Это дает угол отставания коэффициента мощности ϕ1> 0. По мере увеличения тока возбуждения угол отставания коэффициента мощности уменьшается.
При определенном токе ротора вектор наведенной ЭДС Ea2 расположен перпендикулярно вектору напряжения на клеммах
, и, следовательно, вектор тока статора совмещен с напряжением на клеммах, то есть с нулевым углом коэффициента мощности ϕ2 = 0. Когда ротор ток
24
Синхронные машины
дополнительно увеличивается, ток статора опережает напряжение на клеммах или угол опережающего коэффициента мощности ϕ3
I a cosϕ Ia1 ϕ3
ϕ1
Ia2 δ1 δ2
Ea sinδ
Va δ3 jX s Ia1
jX s Ia3 jX s Ia2
Ia3 Ea1
Ea2
Ea3
Фазорная диаграмма синхронного двигателя в режиме пониженного возбуждения, единичного коэффициента мощности и избыточного возбуждения Для преобразования определенного количества активных электрическая энергия в механическую, требуется определенное количество магнитного потока.В случае запаздывающего коэффициента мощности ток возбуждения ротора настолько мал, что от источника питания статора требуется некоторая реактивная мощность, и, следовательно, ток статора отстает от напряжения на клеммах. Это состояние называется возбуждением. Когда тока возбуждения ротора достаточно для создания необходимого магнитного потока, получается единичный коэффициент мощности. Если ток возбуждения ротора больше необходимого, паразитная реактивная мощность должна быть передана в линии питания источника питания. Это состояние известно как чрезмерное возбуждение.На практике из-за этой особенности синхронные двигатели часто работают без активной нагрузки в качестве синхронных конденсаторов с целью коррекции коэффициента мощности.
Диаграмма
под векторной диаграммой схематически иллюстрирует компенсацию коэффициента мощности для индуктивной нагрузки, которая является обычной для заводов, использующих большие асинхронные двигатели с синхронным конденсатором.
Путем управления током возбуждения ротора таким образом, чтобы синхронный конденсатор
потреблял линейный ток с опережающим фазовым углом, мнимая составляющая которого составляла
25
Синхронные машины
составляла ток нагрузки, общий линейный ток имел бы минимальная мнимая составляющая.Следовательно, общий коэффициент мощности индуктивной нагрузки и синхронного конденсатора будет близок к единице, а величина общего линейного тока будет минимальной. Также можно видеть, что только когда коэффициент мощности равен единице или ток статора совмещен с напряжением на клеммах, величина тока статора минимальна. Построив график зависимости тока статора от тока возбуждения ротора, можно получить семейство V-образных кривых. Показано, что для работы большей активной нагрузки с единичным коэффициентом мощности требуется больший ток возбуждения ротора.
Трехфазный источник питания
Is
I load I cmp
Индуктивная нагрузка
Синхронный конденсатор Компенсация коэффициента мощности для индуктивной нагрузки с использованием синхронного конденсатора
26
Синхронные машины
Приводы синхронного двигателя Синхронный двигатель не может запуск в синхронном режиме, поскольку инерция и механическая нагрузка не позволяют ротору догнать вращающееся магнитное поле с синхронной скоростью. Обычно в ротор вставляют несколько медных или алюминиевых стержней, замкнутых накоротко концевыми кольцами, и запускают двигатель как асинхронный (принцип работы асинхронных двигателей обсуждается в другой главе).Когда скорость ротора близка к синхронной скорости, на ротор подается питание постоянного тока, и он будет догонять вращающееся магнитное поле или синхронизироваться с ним. Однако это не проблема для синхронных двигателей, управляемых силовым электронным инвертором, поскольку инвертор может увеличивать частоту возбуждения. Поскольку скорость ротора пропорциональна частоте возбуждения статора, скоростью синхронного двигателя можно управлять только путем изменения частоты статора. Распространенной стратегией управления скоростью является управление скоростью с переменным напряжением и частотой (VVVF), при котором соотношение между напряжением статора и частотой поддерживается постоянным.Ниже представлена блок-схема привода синхронного двигателя с разомкнутым контуром. Для скоростей вращения ротора ниже номинальной используется стратегия VVVF, а максимальный крутящий момент, который может создать двигатель, является постоянным. Когда требуемая скорость ротора выше номинальной, напряжение статора ограничивается номинальным напряжением, а частота увеличивается. Затем максимальный крутящий момент уменьшается с увеличением скорости. Как показано кривыми крутящий момент-скорость на приведенной ниже диаграмме, моторный привод подходит для нагрузки с постоянным крутящим моментом, когда скорость ниже номинальной, и будет подходить для нагрузки с постоянной мощностью, когда скорость выше номинальной. .
27
Синхронные машины
ωr ωmax
ωrated
0
Tmax
T
Кривые скорости вращения синхронного двигателя с управлением VVVF
28
Синхронные машины
При управлении с обратной связью, возбуждением статора можно управлять в соответствии с положением ротора таким образом, чтобы магнитное поле статора было перпендикулярно полю ротора, и, следовательно, электромагнитный момент, создаваемый двигателем, всегда был максимальным при любых условиях нагрузки.Кривая крутящего момента двигателя в этом случае практически такая же, как у двигателя постоянного тока. Этот тип моторного привода известен как бесщеточные двигатели постоянного тока, которые будут рассмотрены в другой главе. На приведенных ниже схемах показан оптический датчик положения и блок-схема привода синхронного двигателя с обратной связью.
29
Синхронные машины
Упражнения 1. 6-полюсная синхронная машина с круглым ротором, 3-х фазная синхронная машина, соединенная звездой, имеет следующие результаты испытаний: Испытание на разрыв цепи: 4000 В между фазой при 1000 об / мин, ток ротора 50 А Испытание на короткое замыкание : 300 A при 500 об / мин 50 A ток ротора. Пренебрегая сопротивлением статора и потерями в сердечнике, предполагая линейную характеристику холостого хода, рассчитайте: (a) синхронное реактивное сопротивление машины при 50 Гц, (b) ток ротора, необходимый для машина для работы в качестве мотора на 0.8 коэффициент мощности, ведущий от линии питания 3,3 кВ к линии с выходной мощностью 1000 кВт, (c) ток ротора, необходимый для работы машины в качестве генератора на бесконечной шине 3,3 кВ между фазой при поставке 1500 кВА. при отставании коэффициента мощности 0,8, (d) угол нагрузки для (b) и (c), и нарисуйте векторную диаграмму для (b) и (c). Ответ: 7,7 Ом, 69,54 А, 76 А, 24,8 °, 27,4 ° 2. Для синхронного генератора мощностью 2500 кВА, 6600 В, подключенного по схеме «звезда», работающего при полной нагрузке, рассчитайте (а) регулирование напряжения в процентах при коэффициенте мощности 0.8 с запаздыванием, (b) регулировка напряжения в процентах при коэффициенте мощности 0,8 с опережением. Синхронное реактивное сопротивление и сопротивление якоря составляют 10,4 Ом и 0,071 Ом соответственно. Ответ: 44%, -20% 3. Определите частоту вращения ротора в об / мин следующих трехфазных синхронных машин: (a) f = 60 Гц, количество полюсов = 6, (b) f = 50 Гц, количество полюсов = 12, и (c) f = 400 Гц, количество полюсов = 4. Ответ: 1200 об / мин, 500 об / мин, 12000 об / мин 4. AY подключен 3 фазы 50 Гц 8-полюсный синхронный генератор переменного тока имеет индуцированный напряжение между линиями 4400 В при токе возбуждения ротора 10 А.Если этот генератор переменного тока должен генерировать напряжение 60 Гц, вычислите новую синхронную скорость и индуцированное напряжение для того же тока ротора, равного 10 А. Ответ: Enew = 5280 В, nsyn-new = 900 об / мин 5. 3 фазы Y подключены 6 Полюсный генератор переменного тока рассчитан на 10 кВА 220 В при 60 Гц. Синхронное реактивное сопротивление Xs = 3 Ом. Линия холостого хода и напряжение на клеммах нейтрали при 1000 об / мин следует кривой намагничивания, показанной ниже. Определите (а) номинальную скорость в об / мин, (б) ток возбуждения, необходимый для работы с полной нагрузкой при отставании коэффициента мощности 0,8.E (V) 11 38 70 102 131 156 178 193 206215 221 224 If (A) 0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0 2,2
30
Синхронные машины
Ответ: nsyn = 1200 об / мин, If = 1.0 A 6. Генератор, о котором идет речь, 3 с номиналом 10 кВА, 220 В, 26,2 А, при 1200 об / мин. Определите угол крутящего момента и ток возбуждения для работы двигателя с единичным коэффициентом мощности при номинальной нагрузке. Ответ: угол крутящего момента = 32o, If = 0,75 A 7. Трехфазная индукционная печь потребляет 7,5 кВА при отставании коэффициента мощности 0,6.Доступен синхронный двигатель 10 кВА. Если общий коэффициент мощности комбинации должен быть равен единице, определите механическую нагрузку, которую может выдержать двигатель. Ответ: 8 кВт 8. Следующие данные взяты из характеристик разомкнутой цепи и короткого замыкания 45 кВА 3-фазной Y-подключенной 220 В (линия к линии) 6-полюсной синхронной машины 60 Гц: от характеристики разомкнутой цепи: Линия к линии напряжение = 220 В Ток возбуждения = 2,84 А из характеристики короткого замыкания: Ток якоря (А) 118152 Ток возбуждения (А) 2.20 2,84 от линии воздушного зазора: ток возбуждения = 2,20 A Напряжение между фазами = 202 В Рассчитайте ненасыщенное значение синхронного реактивного сопротивления и его значение насыщения при номинальном напряжении. Выразите синхронное реактивное сопротивление в Ом на фазу, а также в единицах номинала машины в качестве основы.