Функции Arduino | Учи Урок информатики
Разбиение исходного кода программы на отдельные фрагменты (будем называть их — функции) позволяет выделять отдельные логические подзадачи, которые в нужный момент выполняются и возвращают управление туда, откуда были «вызваны». Типичная причина создания функции — необходимость осуществлять определенное действие больше одного раза.
Использование функций (или, функциональный подход к программированию) имеет ряд преимуществ:
- функции помогают самоорганизации программиста, часто способствуя более четкому осмыслению программы;
- кодирование функции сосредоточено в одном месте программы — она должна быть написана и отлажена один раз;
- функции позволяют уменьшить размер скетча и сделать его более компактным, поскольку один и тот же код может использован много раз;
- уменьшается вероятность ошибок, если надо изменить поведение кода — это тоже надо делать только в одном месте;

В скетче Arduino должны быть две обязательные функции — setup() и loop(). Остальные функции должны находиться за пределами фигурных скобок этих функций (до или после).
Разберем в качестве примера простую функцию, умножающую два числа.
Для «вызова» нашей простейшей функции умножения, мы должны передать ей параметры, соблюдая соответствие их типов тем, которые она ожидает (а именно целые числа):
1 2 3 4 5 6 7 8 |
void loop{
int i = 2;
int j = 3;
int k;
k = myMultiplyFunction(i, j); // в k будет помещен результат "возвращенный"
//функцией myMultiplyFunction. То есть 6.
} |
При этом функция обязательно должна быть объявлена за пределами других функций, например, после функции loop(), перед setup() или после setup() и перед loop()
Целиком текст полученного скетча будет выглядеть так:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
void setup(){
Serial.
|

к содержанию ->>
return
Описание
Завершает текущую функцию и возвращает результат в вызвавшую функцию (если необходимо).
Синтаксис
1 2 |
return; return value; // обе формы записи допустимы |
value: любая переменная или константа
Пример
1 2 3 4 5 6 7 |
int myAnalogSensor(){
if (analogRead(0) > 100) {
return true;
else{
return false;
}
}
|
к содержанию ->>
Пожалуйста, оцените статью
4.
Arduino — Функции — CoderLessons.com
Функции позволяют структурировать программы по сегментам кода для выполнения отдельных задач. Типичный случай создания функции — это когда в программе нужно выполнить одно и то же действие несколько раз.
Стандартизация фрагментов кода в функции имеет несколько преимуществ:
Функции помогают программисту оставаться организованным. Часто это помогает осмыслить программу.
Функции кодифицируют одно действие в одном месте, так что функцию нужно продумать и отладить только один раз.
Это также уменьшает вероятность ошибок при модификации, если код необходимо изменить.
Функции делают весь эскиз меньше и компактнее, потому что фрагменты кода многократно используются.
Они облегчают повторное использование кода в других программах, делая его модульным, а использование функций часто делает код более читабельным.

Функции помогают программисту оставаться организованным. Часто это помогает осмыслить программу.
Функции кодифицируют одно действие в одном месте, так что функцию нужно продумать и отладить только один раз.
Это также уменьшает вероятность ошибок при модификации, если код необходимо изменить.
Функции делают весь эскиз меньше и компактнее, потому что фрагменты кода многократно используются.
Они облегчают повторное использование кода в других программах, делая его модульным, а использование функций часто делает код более читабельным.
В скриншоте Arduino или программе есть две обязательные функции: setup () и loop (). Другие функции должны быть созданы вне скобок этих двух функций.
Наиболее распространенный синтаксис для определения функции —
Объявление функции
Функция объявляется вне любых других функций, выше или ниже функции цикла.
Мы можем объявить функцию двумя различными способами —
Первый способ — просто записать часть функции, называемую прототипом функции,
- Тип возврата функции
- Имя функции
- Тип аргумента функции, не нужно писать имя аргумента
Прототип функции должен сопровождаться точкой с запятой (;).
В следующем примере показана демонстрация объявления функции с использованием первого метода.
пример
int sum_func (int x, int y) // function declaration {
int z = 0;
z = x+y ;
return z; // return the value
}
void setup () {
Statements // group of statements
}
Void loop () {
int result = 0 ;
result = Sum_func (5,6) ; // function call
}Вторая часть, которая называется определением или объявлением функции, должна быть объявлена ниже функции цикла, которая состоит из —
- Тип возврата функции
- Имя функции
- Тип аргумента функции, здесь вы должны добавить имя аргумента
- Тело функции (операторы внутри функции, выполняемые при вызове функции)
В следующем примере демонстрируется объявление функции с использованием второго метода.
пример
int sum_func (int , int ) ; // function prototype
void setup () {
Statements // group of statements
}
Void loop () {
int result = 0 ;
result = Sum_func (5,6) ; // function call
}
int sum_func (int x, int y) // function declaration {
int z = 0;
z = x+y ;
return z; // return the value
} Второй метод просто объявляет функцию над функцией цикла.
Руководство по интегрированной среде разработки Arduino *
Необходимое оборудование:
- Galileo плата Intel®
- Источник питания (включен в комплект)
- USB-кабель Micro (тип B)
- Установленный и сконфигурированный программный обеспечение Arduino * версии v 1.5.3
Образец эскиза
Когда вы создаете файл в программном обеспечении Arduino *, он открывает набросок с базовой разметкой программы Arduino. Ниже представлен пользовательский интерфейс:
На панели слева направо отображаются значки в верхней части Arduino пользовательского интерфейса, представляющие следующее:
Убедитесь в том, что вы компилируете код. Используйте для проверки кода на наличие ошибок перед отправкой эскиза.
Отправьте набросок.
В новом окне редактора откроется новое окно редактирования кода вместо текущего.
Открывает файл.
Сохранение эскиза.
Последовательный монитор открывает последовательный монитор, который удобен для отладки
Стрелка вниз предоставляет вам такие возможности, как добавление наброска в текущий проект. Она откроется в виде новой вкладки в текущем редакторе кода, которая полезна для организации кода в логические файлы.
Она откроется в виде новой вкладки в текущем редакторе кода, которая полезна для организации кода в логические файлы.
В нижней левой части пользовательского интерфейса Arduino отображается номер строки, где находится курсор.
| Примечание | Изображение — это программный интерфейс Arduino, озаглавленный Бареминимум, который находится в разделе примеры файлов > > 0,1 основы. Ознакомьтесь с другими примерами и поэкспериментируем. |
Комментарии
Две косые черты (между знаком «{» и «}») представляют начало комментария встроенного кода. После загрузки вашего кода на доску компилятор игнорирует текст после двух косых черт. Комментарий с помощью встроенного кода позволяет оставлять заметок для себя, а также для людей, считывающих ваш программный код. Кроме того, можно писать многострочные комментарии, запустив комментарий с/* и заканчивая знаками */.
/* You are reading an
example of a comment
that has many lines.![]() */
*/
Переменные
Передача данных по всей программе может быстро стать запутанной. Переменные похожи на контейнеры хранилища, содержащие различные типы значений. Использование переменных для передачи значений — это прекрасный способ обеспечить систематизацию и удобочитаемость вашего кода.
При объявлении переменной (ее внедрении в программу) важно выбрать правильный тип данных. Если вы пытаетесь измерить интенсивность света с помощью фотометра, возможно, вам потребуется выполнить точное считывание. Объявление типа переменной для удвоенного размера резервирует место в памяти для числа с десятичной запятой.
Примере: double light_sensitivity;
Где объявляется double объявляемая переменная, light_sensitivity которая является именем переменной. Чтобы сослаться на переменную в вашем коде, просто используйте ее имя.
| Примечание | Выберите имя переменной, которое относится к тому, на которое вы ссылаетесь. Если название состоит из нескольких слов, используйте знак подчеркивания (_) между словами, чтобы увеличить читаемость. Если название состоит из нескольких слов, используйте знак подчеркивания (_) между словами, чтобы увеличить читаемость.Обязательно проверьте орфографию на словах, которые вы выберете. Один из недопустимых знаков может привести к неправильной компиляции программы. |
Для получения дополнительной информации о типах данных и переменных перейдите на страницу справочника по Arduino.
Функции
Два компоновочных блока наброска — функция установки и функция Loop . Для работы всех программ требуется использование этих двух функций, поскольку они являются необходимыми структурами для компилируемой программы.
Функция установки — это где вы можете добавить такие вещи, как объявления переменных и инициализации режимов закрепления.
Функция Loop — это сердце вашей программы. В этом поле представлено название, которое будет циклически непрерывно работать с основной логикой программы.
Точно так же, как у переменных, функции бывают разных типов. Функции setup и Loop имеют тип void. Это означает, что они выполняют только те задачи, на которые они указывают, и не возвращают значения (таким образом, void). Функции, возвращающие значения, обсуждаются на следующих занятиях.
Функции setup и Loop имеют тип void. Это означает, что они выполняют только те задачи, на которые они указывают, и не возвращают значения (таким образом, void). Функции, возвращающие значения, обсуждаются на следующих занятиях.
Введение
Приступая к работе
Интегрированная среда разработки Arduino
Всем привет
Переключить вверх
Arduino IDE для ESP8266 – esp8266
Arduino IDE для ESP8266 позволяет писать скетчи и загружать их одним кликом в ESP8266 в знакомой среде (я бы даже сказал «до боли знакомой») Arduino IDE. Для тех кому интерфейс Arduino IDE не очень по душе, есть поддержка плагина для Eclipse. Итак, обо всем по порядку. Самые нетерпеливые могут сразу перейти к Arduino IDE для ESP8266: быстрый старт
Arduino IDE для ESP8266 позволяет создавать прошивки и прошивать их в ESP8266 точно так же, как вы это делаете с Arduino. При этом никаких плат Arduino не требуется, это не тот случай, когда ESP8266 используется в качестве WiFi шилда для Arduino. Кроме того, вы можете использовать практически все Arduino библиотеки с ESP8266 после небольшой доработки. В настоящее время уже достаточно много библиотек адаптировано для использования с ESP8266, но о них чуть ниже.
Кроме того, вы можете использовать практически все Arduino библиотеки с ESP8266 после небольшой доработки. В настоящее время уже достаточно много библиотек адаптировано для использования с ESP8266, но о них чуть ниже.
Arduino IDE для ESP8266 поддерживает все существующие на сегодняшний день модули ESP8266 (потому что они особо и не отличаются), включая модули с флеш бОльшего, чем 512k объема. Поддерживаются модули NodeMCU (всех версий), Olimex-MOD-WiFi-ESP8266.
Поддерживается режим авторестарта и прошивки по RTS+DTR, как у обычной Arduino, для этого потребуется USB-TTL адаптер с разведенными пинами DTR и RTS. Если у вас только RX, TX и GND на USB-TTL, то придется по-старинке вручную притягивать к земле GPIO0 и передергивать питание модуля для прошивки.
Arduino IDE для ESP8266: краткий обзор реализованных в настоящее время функций
Базовые функции языка Wiring
Управление GPIO осуществляется точно также, как и управление pin для arduino:
pinMode,
digitalRead,
digitalWrite,
analogWrite функционируют как обычно. GPIO нумеруются так, как мы уже привыкли: для чтения состояния GPIO2 нужно использовать команду
digitalRead(2)
GPIO нумеруются так, как мы уже привыкли: для чтения состояния GPIO2 нужно использовать команду
digitalRead(2)
GPIO0-GPIO15 могут быть INPUT, OUTPUT, INPUT_PULLUP, и INPUT_PULLDOWN. GPIO16 может быть только INPUT, OUTPUT или INPUT_PULLDOWN. Команда analogRead(A0) считывает значение ADC (АЦП) с TOUT.
Команда analogWrite(pin, value) включает программный PWM (ШИМ) на указанном GPIO. Команда analogWrite(pin, 0) отключает PWM. value может быть в диапазоне от 0 до PWMRANGE. Константа PWMRANGE в настоящее время равна 1023.
Поддержка прерываний обеспечивается функциями attachInterrupt, detachInterrupt. Прерывания могут быть назначены на любой GPIO, кроме GPIO16. Стандартные прерывания Arduino CHANGE, RISING, FALLING тоже поддерживаются.
ESP8266 — функции пинов
Тайминг и delay
Функции
millis и
micros возвращают миллисекунды и микросекунды соответственно, прошедшие с момента старта модуля. Любимая многими функция
delay также присутствует и приостанавливает выполнение скетча на указанное время в миллисекундах и позволяет отработать операциям WiFi и TCP/IP. Функция
delayMicroseconds используется аналогично, только время задается в микросекундах.
Функция
delayMicroseconds используется аналогично, только время задается в микросекундах.
Помните о том, что когда модуль поддерживает WiFi соединение, ему приходится выполнять множество фоновых задач, кроме вашего скетча. WiFi и TCP/IP функции библиотек SDK имеют возможность обработать все события в очереди после завершения каждого цикла вашей функции loop() или во время выполнения delay(…). Если в вашем коде есть фрагменты, которые выполняются более 50 миллисекунд, то необходимо использовать delay(…) для сохранения нормальной работоспособности стека WiFi.
Также вы можете использовать функцию yield(), которая эквивалентна delay(0). С другой стороны, функция delayMicroseconds блокирует выполнение других задач, поэтому ее использование для временных задержек свыше 20 миллисекунд не рекомендуется.
Последовательные порты Serial и Serial1 (UART0 и UART1)
Объект
Serial работает точно также, как и с Arduino. Помимо аппаратного FIFO (по 128 байт для приема и передачи) определен и программный буфер размером по 256 байт для приема и передачи данных. Прием и передача данных происходит по прерываниям, прозрачно для вашего скетча. Функции записи и чтения блокируют выполнение скетча только когда аппаратный FIFO и программный буфер переполняются.
Прием и передача данных происходит по прерываниям, прозрачно для вашего скетча. Функции записи и чтения блокируют выполнение скетча только когда аппаратный FIFO и программный буфер переполняются.
Serial использует аппаратный UART0, работающий на GPIO1(TX) и GPIO3(RX). Эти пины могут быть переназначены на GPIO15 (TX) и GPIO13 (RX) вызовом функции Serial.swap(); после Serial.begin();. Повторный вызов Serial.swap(); вернет все на свои места.
Serial1 использует аппаратный UART1, работающий только на передачу. UART1 TX это GPIO2. Для включения Serial1 используйте Serial1.begin();
По умолчанию, отладочная информация библиотек WiFi выключается, когда вы вызываете функцию Serial.begin();. Для включения отладочной информации на UART0 используйте Serial.setDebugOutput(true); Для перенаправления вывода отладочной информации на UART1 используйте команду Serial1.setDebugOutput(true);
И
Serial и
Serial1 поддерживают 5, 6, 7, 8 бит данных, odd (O), even (E), и no (N) режимы четности, и 1 или 2 стоп бита. Для выбора нужного режима вызывайте
Serial.begin(baudrate, SERIAL_8N1); или
Serial.begin(baudrate, SERIAL_6E2); и т.д.
Для выбора нужного режима вызывайте
Serial.begin(baudrate, SERIAL_8N1); или
Serial.begin(baudrate, SERIAL_6E2); и т.д.
PROGMEM
Макрос PROGMEM работает точно также, как в Arduino, помещая read only данные и строковые константы (литералы) во флеш память, высвобождая HEAP. Важное отличие состоит в том, что в ESP8266 одинаковые литералы не хранятся в одном месте, поэтому использование строковых констант внутри конструкций F(«») и/или PSTR(«») приводит к расходованию флеш памяти при каждом вызове этих функций. Вы должны самостоятельно управлять одинаковыми строками для экономичного расходования места во флеш памяти.
Библиотека WiFi ESP8266 (ESP8266WiFi)
Функции библиотеки WiFi ESP8266 очень схожи с функциями библиотеки для обычного WiFi шилда.
Список отличий:
- WiFi.mode(m): выбрать режим WIFI_AP (точка доступа), WIFI_STA (клиент), или WIFI_AP_STA (оба режима одновременно).
- WiFi.softAP(ssid) создает открытую точку доступа
- WiFi. softAP(ssid, password) создает точку доступа с WPA2-PSK шифрованием, пароль должен быть не менее 8 символов
- WiFi.macAddress(mac) позволяет получить MAC адрес в режиме клиента
- WiFi.softAPmacAddress(mac) позволяет получить MAC адрес в режиме точки доступа
- WiFi.localIP() позволяет получить IP адрес в режиме клиента
- WiFi.softAPIP() позволяет получить IP адрес в режиме точки доступа
- WiFi.RSSI() пока не реализована
- WiFi.printDiag(Serial); выводит диагностическую информацию
Класс WiFiUDP поддерживает прием и передачу multicast пакетов в режиме клиента. Для передачи multicast пакета используйте вместо udp.beginPacket(addr, port) функцию udp.beginPacketMulticast(addr, port, WiFi.localIP()). Когда вы ожидаете multicast пакеты, используйте вместо udp.begin(port) функцию udp.beginMulticast(WiFi.localIP(), multicast_ip_addr, port). Вы можете использовать udp.destinationIP() для определения того, был ли пакет отправлен на multicast адрес или предназначался именно вам.
Multicast функции не поддерживаются в режиме точки доступа.
 softAP(ssid, password) создает точку доступа с WPA2-PSK шифрованием, пароль должен быть не менее 8 символов
softAP(ssid, password) создает точку доступа с WPA2-PSK шифрованием, пароль должен быть не менее 8 символов Multicast функции не поддерживаются в режиме точки доступа.
Multicast функции не поддерживаются в режиме точки доступа.WiFiServer, WiFiClient, и WiFiUDP работаю точно так же, как и с библиотекой обычного WiFi шилда. Четыре примера идет в комплекте с этой библиотекой.
Тикер
Библиотека Ticker может быть использована для выполнения периодически повторяющихся событий через определенное время. Два примера включено в поставку.
В настоящее время не рекомендуется блокировать операции ввода-вывода (сеть, последовательный порт, файловые операции) в callback функциях тикера. Вместо блокирования устанавливайте флаг в callback функциях и проверяйте этот флаг в основном цикле.
EEPROM
Эта библиотека немного отличается от стандартной Arduino EEPROM. Необходимо вызвать функцию
EEPROM.begin(size) каждый раз перед началом чтения или записи, размер (указывается в байтах) соответствует размеру данных, которые вы намереваетесь использовать в EEPROM. Размер данных должен быть в диапазоне от 4 до 4096 байт.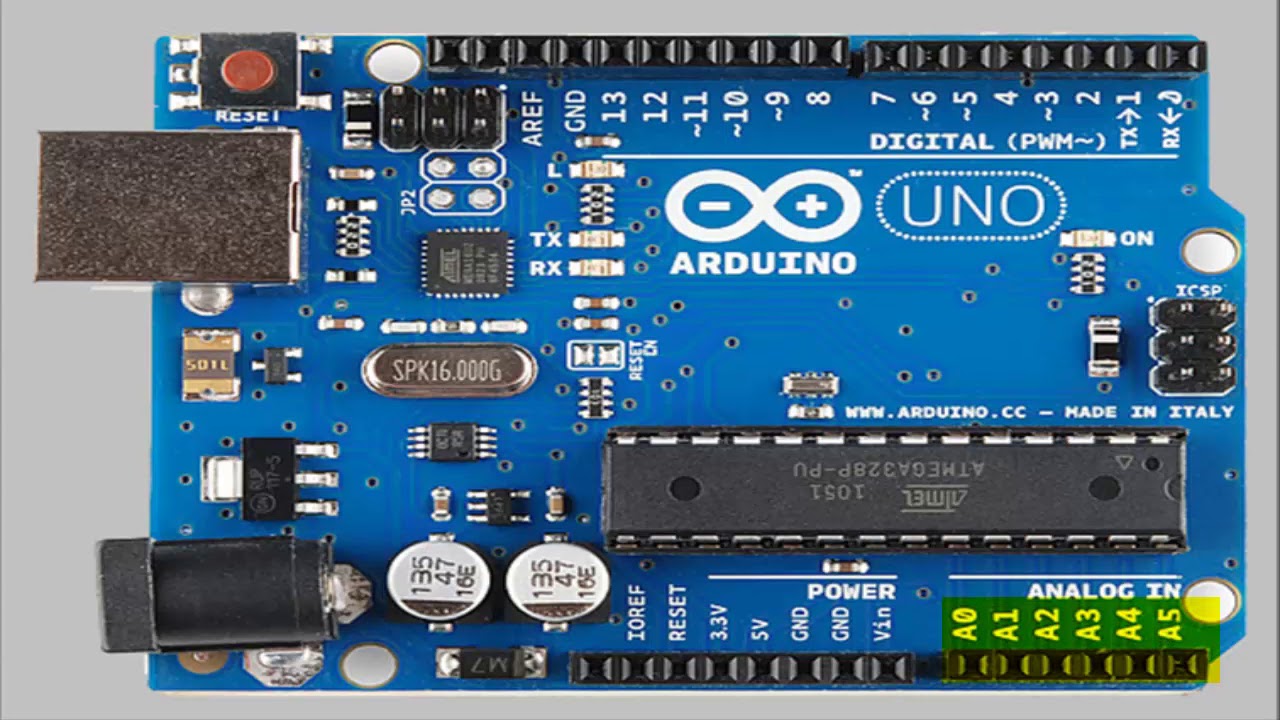
Функция EEPROM.write не производит запись данных во флеш память немедленно, вы должны использовать функцию EEPROM.commit() каждый раз, когда вы хотите сохранить данные в память. Функция EEPROM.end() тоже производит запись данных, а также освобождает оперативную память от данных, запись которых произведена. Библиотека EEPROM использует один сектор во флеш памяти, начиная с адреса 0x7b000 для хранения данных. В поставку включено три примера работы с EEPROM.
I2C (Библиотека Wire)
Реализован только режим ведущего, частота ориентировочно до 450 кГц. Перед использованием шины I2C, нужно выбрать пины SDA и SCL путем вызова функции Wire.pins(int sda, int scl), например Wire.pins(0, 2) для модуля ESP-01. Для других модулей пины по умолчанию 4(SDA) и 5(SCL).
SPI
Библиотека SPI поддерживает весь Arduino SPI API, включая транзакции, в том числе фазу синхронизации (CPHA). Clock polarity (CPOL) пока не поддерживается (SPI_MODE2 и SPI_MODE3 не работают).
ESP8266 API
Поддержка функций, специфичных для ESP8266 (режим глубокого сна и сторожевой таймер), реализована в объекте
ESP. Функция
ESP.deepSleep(microseconds, mode) переводит модуль в режим глубокого сна. Параметр
mode может принимать значения:
WAKE_DEFAULT,
WAKE_RFCAL,
WAKE_NO_RFCAL,
WAKE_RF_DISABLED. GPIO16 должен быть соединен с RESET для выхода из режима глубокого сна.
Функция
ESP.deepSleep(microseconds, mode) переводит модуль в режим глубокого сна. Параметр
mode может принимать значения:
WAKE_DEFAULT,
WAKE_RFCAL,
WAKE_NO_RFCAL,
WAKE_RF_DISABLED. GPIO16 должен быть соединен с RESET для выхода из режима глубокого сна.
Функции ESP.wdtEnable(), ESP.wdtDisable(), и ESP.wdtFeed() управляют сторожевым таймером.
ESP.reset() перезагружает модуль
ESP.getFreeHeap() возвращает размер свободной памяти
ESP.getFreeHeap() возвращает размер свободной памяти
ESP.getChipId() возвращает ESP8266 chip IDE, int 32bit
ESP.getFlashChipId() возвращает flash chip ID, int 32bit
ESP.getFlashChipSize() возвращает размер флеш памяти в байтах, так, как его определяет SDK (может быть меньше реального размера).
ESP.getFlashChipSpeed(void) возвращает частоту флеш памяти, в Гц.
ESP.getCycleCount() возвращает количество циклов CPU с момента старта, unsigned 32-bit. Может быть полезна для точного тайминга очень коротких операций
Библиотека OneWire
Библиотека OneWire была адаптирована для ESP8266 (внесены изменения в OneWire. h) Если у вас установлена библиотека OneWire в папку Arduino/libraries, то будет использоваться именно она, а не из комплекта поставки.
h) Если у вас установлена библиотека OneWire в папку Arduino/libraries, то будет использоваться именно она, а не из комплекта поставки.
mDNS библиотека ESP8266mDNS
Библиотека позволяет реализовать в вашей программе ответ на мультикастовые DNS запросы для локальной зоны, например «esp8266.local». В настоящее время поддерживается только одна зона. Позволяет обращаться к WEB серверу ESP8266 по имени, а не только по IP адресу. Дополнительную информацию вы можете найти в прилагаемом примере и в файле readme данной библиотеки.
Библиотека Servo
Библиотека позволяет управлять сервомоторами. Поддерживает до 24 сервоприводов на любых доступных GPIO. По умолчанию первые 12 сервоприводов будут использовать Timer0 и будут независимы от любых других процессов. Следующие 12 сервоприводов будут использовать Timer1 и будут разделять ресурсы с другими функциями, использующими Timer1. Большинство сервоприводов будут работать с управляющим сигналом ESP8266 3,3в, но не смогут работать на напряжении 3,3в и потребуют отдельный источник питания. Не забудьте соединить общий провод GND этого источника с GND ESP8266
Другие библиотеки, не включенные в поставку Arduino IDE
Почти все библиотеки, которые не используют низкоуровневый доступ к регистрам микропроцессора AVR должны работать без каких-либо доработок. На сегодняшний день можно точно сказать, что протестированы и полностью работоспособны следующие библиотеки:
- arduinoWebSockets — WebSocket сервер и клиент для esp8266 (RFC6455)
- aREST REST API handler библиотека, позволяет управлять GPIO через http запросы вида http://192.168.1.101/digital/6/1
- Blynk — легкий в освоении IoT фреймворк (страница на Kickstarter). Статья на нашем сайте об этой библиотеке и мобильном приложении ESP8266 – Управляем со смартфона через Blynk
- DallasTemperature DS18B20, DS1820, DS18S20, DS1822
- DHT11 — используйте для инициализации следующие параметры DHT dht(DHTPIN, DHTTYPE, 15)
- NeoPixelBus — Arduino NeoPixel библиотека для esp8266
- PubSubClient Библиотека MQTT by @Imroy. Статья на нашем сайте об этой библиотеке ESP8266 подключаемся к OpenWRT+Mosquitto+mqttwarn и передаем данные на ThingSpeak, EMAIL, Android, iOS, Twitter, CloudMQTT в 100 строчек кода в Arduino IDE
- RTC — библиотека for Ds1307 & Ds3231 для esp8266
- Souliss, Smart Home — фреймворк для Умного Дома, построенный на Arduino, Android и OpenHAB
Установка Arduino IDE через Boards Manager
- Установите Arduino IDE с официального сайта Arduino.cc
- Запустить Arduino IDE, далее Файл — Настройки — в поле Additional Boards Manager URLs вставить ссылку на стабильную версию http://arduino.esp8266.com/package_esp8266com_index.jsonили для nightly build http://arduino.esp8266.com/staging/package_esp8266com_index.json, нажать OK (В это поле вы можете вводить несколько ссылок, разделенных запятой)
- Инструменты — Плата — Boards Manager
- В Boards Manager в поле фильтра введите esp8266 или вручную пролистайте список и кликните на ESP8266 by ESP8266 Community Forum
- Кликните Install и дождитесь окончания загрузки (около 130 Мегабайт). Если загрузка произошла слишком быстро, возможно, что вы уже устанавливали Arduino IDE для ESP8266 и потребуется почистить кэш Boards Manager, иначе у вас останется установленной старая версия. Нужно сначала деинсталлировать старую версию, а потом необходимо удалить файлы кэша. Для Win7 x64 удалите файлы из папки C:\Users\Пользователь\AppData\Roaming\Arduino15 и повторите все, начиная с п.2
- Закройте Boards Manager и в меню Инструменты выберите Плата — Generic ESP8266
- Установите частоту вашего модуля 80 или 160Mhz, размер флеш памяти и выберите последовательный порт, к которому подключен ваш USB-TTL адаптер
Схема подключения ESP8266
Оптимальное подключение ESP8266 для Arduino IDE
Оптимальное подключение ESP8266
| Подключение ESP8266 | Примечание | USB-TTL |
|---|---|---|
| VCC | ESP8266 подключайте к внешнему источнику питания >300мА, 3,3V | |
| GND | все контакты GND должны быть соединены вместе: ESP8266, USB-TTL и источника питания | GND |
| TX (UTXD) | RX | |
| RX (URXD) | TX | |
| GPIO0 | подтягивающий к питанию резистор 10k | DTR (если на вашем USB-TTL не разведен пин DTR, то вам придется вручную переключать GPIO0 на землю для перевода ESP8266 в режим прошивки) |
| RESET (RSBT, REST) | подтягивающий к питанию резистор 10k, также можете добавить кнопку, соединяющую RESET и GND для ручного сброса модуля | RTS (если на вашем USB-TTL не разведен пин RTS, то вам придется вручную перезагружать модуль ) |
| CH_PD (CH_EN) | подтягивающий к питанию резистор 10k | |
| GPIO15 (MTDO) | подтягивающий к земле резистор 10k (для тех модулей, где выведен пин GPIO15) | |
| GPIO2 | подтягивающий к питанию резистор 10k (на схеме не показан, но рекомендуется для увеличения стабильности) | |
| GPIO16 | для успешного выхода из режима Deep Sleep необходимо соединить пины ESP8266 GPIO16 и RESET через резистор 470 Ом (на схеме не показан) |
Примечания.
1. Не на всех модулях выведены все пины. Перед приобретением модуля ознакомьтесь с видами модулей и их распиновкой.
2. Если на вашем USB-TTL конвертере выведены пины CTS и DSR — для автозагрузки прошивки они вам не помогут, т.к. работают только на вход.
3. Для стабильной работы ESP8266 требуется источник стабилизированного питания 3,3 вольт, ток более 250 миллиампер. Использование питания от USB-TTL конвертера может привести к нестабильности в работе.
Минимальное подключение ESP8266
Минимальное подключение ESP8266 (повышенная стабильность)
Более подробно, со всеми деталями, о подключении ESP8266 вы можете прочитать в нашей статье ESP8266 – подключение и обновление прошивки
Arduino IDE для ESP8266: быстрый старт
1. Подключить USB-TTL к USB
2. Подключить ESP8266 к USB-TTL как обычно. Если вы подключили ESP8266 по схеме без поддержки автозагрузки прошивки (не подключены DTR и RTS), то вручную соедините GPIO0 с землей, передерните питание модуля — все готово для прошивки
3. Запускаем Arduino IDE
4. В меню Инструменты — Плата — Generic ESP8266 board (в самом низу)
5. В меню Инструменты выбираем порт, к которому подключен наш USB-TTL
6. В меню Инструменты — выбираете частоту, размер флеш памяти вашего модуля
7. В меню Файл — Примеры (Образцы) — ESP8266WiFi — WiFiWebServer
8. В скетче заполняете SSID и пароль вашей WiFi сети
9. Жмем кнопку компиляции и загрузки скетча
10. Ждем окончании процесса прошивки. После прошивки, если модуль подключен по схеме без поддержки автопрошивки, отсоедините GPIO0 от земли и передерните питание модуля без отключения USB-TTL от питания
11. В меню Инструменты — Монитор последовательного порта
12. Выбираем скорость 115200
13. Смотрим что происходит в терминале
14. Когда модуль подключится к сети, то появятся надписи в мониторе «WiFi connected» и «Server started»
15. Ниже будет IP адрес вашего модуля ESP8266, например 192.168.1.248
16. Открываете любой браузер, в строке адреса вбиваете «http://192.168.1.248/gpio/1»
17. Смотрите монитор последовательно порта и если к ESP8266 к GPIO2 у вас подключен светодиод (через резистор, разумеется), то он включится.
18. Profit!
Автором этого проекта адаптации Arduino IDE для ESP8266 является наш соотечественник из Санкт-Петербурга Иван Грохотков.
Скачать Arduino IDE для ESP8266 с github
Скачать Arduino IDE для ESP8266 с build сервера
Скачать исходный код Arduino IDE для ESP8266
Задать вопросы автору проекта Ивану Грохоткову aka igrr или сообщить об ошибке в Arduino IDE для ESP8266 можно в специальном разделе на нашем форуме.
Приложения для удаленного управления Arduino
В данном обзоре указаны 10 распространенных приложений в управлении Ардуино с компьютера или телефона, которые легки в изучении и использовании. Arduino – это платформа, разработанная ввиду технологий современного программирования. Плата с USB разъемами для блока питания. При подключении к ПК, заряжается. Во внутренней системе есть кнопка для форматирования данных.
Главные составляющие:
- Бредбоард – соединяет платформу с устройством.
- Светодиод – индикатор, сигнализирует об управлении.
- Резистор — контролирует подачу электрического тока внутри платформы.
- Фоторезистор – реагирует на тип освещения.
- Транзистор – усиливает электрические сигналы и используется в сложных цепях.
Это было внутреннее описание. Далее переходим к обзору самого приложения. Компанией Google был создан новый интерфейс прикладного программирования под названием Arduino. Предназначается для связи Android устройства с USB. Открывает большие возможности в создании проектов и упрощает программирование и управление с экрана мобильного телефона. Помогает управлять синхронизацией данных.
Обзор возможностей Arduino:
- создание скетчей;
- их редактирование, компилирование и загрузка в плате;
- программирование и разработка кодов.
Работа производится со смартфона из любой части земного шара. В данном обзоре будут описаны программы, разработанные для удаленного пользования Ардуино, а именно Bluetooth и Wi-fi — контроллерами. Они просты в использовании и позволяют работать с любого гаджета. Проект Ардуино состоит из 3 этапов:
- написание кода;
- макетирование;
- прошивка.
Для программирования этих функций, требуется написать код, который можно удалять по необходимости, и прошить среду разработки. Это многоступенчатый процесс. В нем участвует несколько программ.
Arduino Bluetooth Controller
Эта программа работает в 3 основных положениях:
Контроллер. Приложение демонстрируется в облике play идентификатора и управляется кнопками переключения. Работает одной клавишей, основная функция которой – дистанционное управление.
Диммер. На расстоянии регулирует настройки яркости и скорости.
Терминал. Осуществление отправления директива для дешифрирования.
Установка приложения Arduino Bluetooth Controller сводит несколько устройств по воздушному каналу. Сообщения передаются по датчикам, контроллерам и обратно. Управляя смартфоном при помощи блютуз модулей, также возможно организовать беспроводное соединение целого проекта. Программирование такого типа доступно всем желающим и не требует особых усилий.
ArduinoDroid — Arduino IDE
Используется программистами как средство редактирования кодов и создания программ. Особенность – написанный скетч превращается в СС+, компилируется и грузится в Arduino. Отлично подходит для работы новичков в этой области. Приложением можно пользоваться бесплатно и в открытом доступе.
Первым шагом в использовании будет заливка скетча на микроконтроллер. Далее нажав кнопку «Загрузить» необходимо дождаться окончания загрузки. Мигающий светодиод означает, что все было сделано правильно. Все готово к написанию и использованию прошивок.
ArduinoDroid – легкий в использовании софт. Проводит редактирование, компилирование и загрузку кодов в плату с мобильного устройства или планшета. Так же рекомендуется проводить редактирование шифра или заливать готовый, если программа забанена..
RemoteXY: Arduino Control
Данная программа управления Ардуино, позволяет создать персональную панель. Дистанционное управление происходит через:
- Инет;
- Вай-Фай;
- Ик-порт;
- Блютуз.
На странице http://remotexy.com можно найти и скачать много интересных инструкций. К примеру, как создавать оригинальные клавиши и переключатели. Функционал адаптирован под новичка и не создаст проблем в использовании.
Управление ардуино с компьютера, а именно RemoteXY, возможно через облако. Это превозносит его перед аналогичными русскими софтами Arduino.
Приложение Blynk
Этакий разработчик идей, имеющий открытый вход к запуску на платформе Ардуино. Главное требование в использовании – наличие интернета: Wi-Fi или мобильный трафик. Только в этом случае Blynk будет готов к выполнению. Начать использование можно спустя несколько минут, после окончания настроек. Программой поддерживается АО по выбору пользователя.
Основные функции приложения Blynk заключаются в управлении устройствами при помощи удаления и добавления протоколов HTTP, а также запросов GET и POST. Значения параметров можно обновлять и получать. Запросы обновляются в самом приложении.
Вариативность – важная точка программы. Имея связь с работающими платформами, можно соединиться с сервером любым удобным способом. Данный инстинктивный портал обладает простотой в использовании над проектом. Библиотека постоянно обновляется для всех приложений Arduino Blynk.
Клиентов, желающих включать кофе машинку со своего смартфона, заинтересует это приложение. Это, пожалуй, единственный сервис с подобными возможностями. И не смотря на, то, что он практически безлимитный, является трудным Openhab. В сравнении с другими сервисами обладает быстрой скоростью при запуске.
Bluino Loader – Arduino IDE
ПО для компиляции кода в файл и загрузки его на платформу Ардуино через смартфон и USB OTG. Громоздкие кнопки и запутанные провода значительно усложняют работу над проектами. Для упрощенного контроля удаленным администрированием предоставляется графический идентификатор Bluino Loader IDE. Разрабатывает проекты, доступные триггеру. Подключается к всемирной паутине с помощью: Wi-Fi, Ethernet или через накопитель ESP8266. Когда необходимые процедуры будут выполнены и произойдет начало работы, приложение даст сигнал.
Настройка софта для создания проектов займет не более 5 минут. Матобеспечение настраивается по выбору пользователя. Простой и удобной софт. Для проверки заливают скетч в микроконтроллер и убеждаются в том, что все работает как надо. Мигающий диод подаст сигнал о правильности выполняемых действий. Далее приступают к прошивкам.
Arduino Bluetooth Control
Сокращенное название — ABC. Управляет и контролирует основные возможности API. Используется в мониторинге контактов через Bluetooth. Работает в автономном режиме. Приобщение к работе производит строго из Ардуино.
Инструменты, используемые в процессе:
- Metrics – передает показатели о сбоях и изменениях. Те, свою очередь, приходят на телефон в виде сообщения об остановке работы. Это подобие функции, где встряхнув гаджет можно отправить данные.
- Клавиши с указателями – служат для отправки информации.
- Терминал – варьирует информацией с временными показателями по назначению.
- Accelerometer – управление жестами. Смартфон превращается в механизм для регулирования машины.
- Голос – создает речевые команды. Доступно голосовое общение с роботом.
- Кнопки – функционируют 6 штук в горизонтальном положении. Используются для доставки информации на Arduino.
Управление проектами в дистанционном и удаленном виде стало частой необходимостью. ABC подходит для этих целей на 100%. UART (Serial) предназначается для беспроводного соединения Ардуино и PC. Данное подключение не нуждается в библиотеках и схемах.
BT Voice Control for Arduino
Главное предназначение данного софта – передача ультразвуковых сигналов сквозь преобразователи. Они соединены с платформой Arduino андроид благодаря Bluetooth порту. Главный модуль в работе — HC-05. Он передает интервал между объектами. Данные отображаются в смартфоне и на Hub диске портала, через это приложение.
BT Voice Control – это голосовое управление Ардуино. Владеет функцией распознавания команд: forward, back, left, right. Чувствительные датчики переадресовывают расстояние в объект Arduino. Далее при помощи модуля Bluetooth HC-05 направляет его в приложение. Программа сэкономит время, тратящееся на набор команд вручную.
Virtuino
Программа для Андроид, предназначенная для мониторинга сенсора. Управляет электро устройствами через Bluetooth, Wi-Fi или Интернет.
При помощи Виртуино создаются:
светодиоды;
кнопки;
переключатели;
дисплеи задач;
инструменты;
регуляторы.
Приложение способно совмещать несколько проектов в один. Управляет отличными платформами единовременно через Bluetooth и Wi-fi. Бесплатно в использовании. Относится к подкатегории System Maintenance. Есть возможность проектировать внутреннее оформление с разной визуализацией.
К ним относятся:
- светодиоды;
- переключатели;
- диаграммы;
- счетчики;
- аналоговые приборы.
Обучаться Virtuino можно по учебным пособиям и видео урокам с библиотечной поддержкой. Пока приложение работает в режиме английского языка.
Bluetooth Controller 8 Lamp
Платформа Arduino была создана в 2003 году. Всеобщего внимания она достигла, благодаря низкой цене, а также многомилионному сообществу, направленного на углубленное изучение программирования. Микропроцессоры и микроконтроллеры поставляются с платами. Самыми популярными считаются Arduino. Итальянские модели имеет много функций по расширению и исследованию встроенных Pro систем.
Bluetooth Controller 8 Lamp создан для регулировки функций Ардуино 8 канальным контроллером. Работает при помощи модулей Bluetooth HC-05, HC-06 и HC-07. 8 кнопочный интерфейс соответствует каждой лампочке.
Метод активен только в пределах видимости. В сравнении с другими беспроводными способами — этот самый дешевый. Комплектующие платы стоят менее 1 доллара. Для работы подходят даже подержанные варианты. Статичные девайсы, используя инфракрасный контроллер в потолочных светодиодных лентах, решают легко проблемы, возникшие в процессе.
IoT Wi-Fi контроллер
Интерфейс этого приложения показывает все операции ввода и вывода на Ардуино. Переключение GPIO и показания АЦП управляют гаджетом в реальном времени.
Добавить WI-Fi к устройствам возможно с помощью IoT контроллера. Он имеет 8-битный микроконтроллер и IMU (Inertial Measurement Unit). Соединение защищено однокристальным крипто-ускорителем ECC 608.
Уникальный интерфейс IoT Wifi Controller отображает контакты в реальном времени с подробной информацией, благодаря уровню GPIO. Показатели ADC также можно подключать к плате с помощью телефона (Айфона) или маршрутизатора.
Не реализованные функции:
- расширенная подсветка анаграмм;
- автозаполнение;
- руководства для объединения других приложений.
Базы Uno R3 и FTDI в данное время поддерживают рабочее состояние платы Arduino. В процессе находится разработка Mega, Due и Nano. Используемые в обучении платы Arduino — USB кабель OTG не влетит в копеечку. Стоимость до 2 долларов.
Программа «умный дом» работает при помощи платформы Arduino. В данном случае используется данный андроид и сама платформа. Для работы совместили домашние и веб серверы. Результат превзошел ожидания. Теперь при помощи мобильного устройства можно управлять системой целого дома: включать и выключать свет, электрические приборы, закрывать двери, окна и другое.
В статье рассмотрены 10 обзорных приложений — для платы «Ардуино». В процессе работы и изучения не возникнет проблем с программированием Windows и в других. Затруднения решаются подключением к пинам. Те в свою очередь аппаратно запрограммированы UART. Далее используются традиционные библиотеки.
Регулирование платформы Ардуино и ее «помощников», увеличивают программирование и соприкосновение с другими устройствами. Регулировка показателей, изменение настроек, создание роботов и машин – это теперь делается, при помощи удаленного контроля и управлению. Эта самая популярная плата, используемая в программировании. Необходимые запчасти и аксессуары для работы и учебы, продаются по доступной цене в соответствующем магазине компьютерной техники.
Функция задержки Arduino, и почему вы не должны ее использовать
Когда вы впервые начали учиться, как развиваться
для Arduino
Вы, вероятно, создали продукт, который работает примерно так:
К вашему Arduino будет подключен один светодиод. Это будет включать и выключать каждую секунду или около того, и будет продолжаться, пока Arduino не будет выключен. Это программа «Hello World» от Arduino, которая прекрасно иллюстрирует, как всего несколько строк кода могут создать что-то осязаемое.
Я также готов поспорить, что вы использовали функцию delay () для определения интервалов между включением и выключением света. Но вот в чем дело: хотя задержка удобна для основных демонстраций того, как работает Arduino, вы не должны использовать ее в реальном мире. Вот почему — и что вы должны использовать вместо этого.
Как работает Delay ()
Принцип работы функции delay () довольно прост. Он принимает одно целое число
(или число) аргумент. Это число представляет время (измеренное в миллисекундах), в течение которого программа должна дождаться перехода к следующей строке кода.
Но проблема в том, что функция delay () не является хорошим способом заставить вашу программу ждать, потому что она так называемая «блокирующая» функция.
Разница между блокирующими и неблокирующими функциями
Чтобы проиллюстрировать, почему блокирующие функции плохи, я хочу, чтобы вы представили на кухне двух разных поваров: Генри Блокинга и Эдуардо Нон Блокинга. Оба выполняют одну и ту же работу, но совершенно разными способами.
Когда Генри готовит завтрак, он начинает с того, что кладет в тостер два куска хлеба. Когда он, наконец, пингует, и хлеб выпадает золотисто-коричневого цвета, Генри кладет его на тарелку и разбивает два яйца на сковороде. Снова, он готовится, поскольку нефть появляется, и белые начинают укрепляться. Когда они закончили, он накрывает их и начинает жарить два ломтика бекона. Как только они станут достаточно хрустящими, он снимает их со сковороды, ставит их на тарелку и начинает есть.
Эдуардо работает немного по-другому. Пока его хлеб поджаривается, он уже начал жарить яйца и бекон. Вместо того, чтобы ждать, пока один предмет закончит готовиться, прежде чем переходить к следующему, он готовит несколько блюд одновременно. Конечным результатом является то, что Эдуардо тратит меньше времени на приготовление завтрака, чем Генри, и к тому времени, когда Генри Блокинг закончил, тост и яйца уже остыли.
Это глупая аналогия, но она иллюстрирует суть.
блокировка функции не позволяют программе делать что-либо еще, пока эта конкретная задача не будет выполнена. Если вы хотите, чтобы несколько действий происходили одновременно, вы просто не можете использовать delay ().
В частности, если ваше приложение требует, чтобы вы постоянно получали данные от подключенных датчиков, вам следует позаботиться о том, чтобы не использовать функцию delay (), поскольку она приостанавливает абсолютно все.
К счастью, delay () — не единственный способ заставить вашу программу ждать при кодировании для Arduino.
Знакомьтесь, Миллис ()
Функция millis () выполняет одну задачу. При вызове он возвращает (в виде длинного типа данных) количество миллисекунд, прошедших с момента первого запуска программы. Итак, почему это полезно?
Потому что, используя немного простой математики, вы можете легко «оценить» аспекты вашей программы, не влияя на ее работу. Ниже приведена базовая демонстрация того, как работает millis (). Как вы увидите, программа включает светодиодный индикатор на 1000 миллисекунд (одну секунду), а затем выключает его. Но самое главное, он делает это не блокирующим образом.
Теперь давайте посмотрим, как это работает с Arduino.
Эта программа, которая в значительной степени основана на официальной документации Arduino, работает, вычитая предыдущее записанное время из текущего времени. Если остаток (т. Е. Время, прошедшее с момента последней записи) превышает интервал (в данном случае 1000 миллисекунд), программа обновляет переменную previousTime до текущего времени и либо включает, либо выключает светодиод.
А поскольку он неблокирующий, любой код, расположенный за пределами первого оператора if, должен работать нормально.
Нашли какие-нибудь другие блокирующие функции, к которым мы должны относиться с осторожностью? Дайте мне знать в комментариях ниже, и мы будем общаться.
Авторы фотографий: Ардуино (Дэниел Спиесс), шеф-повар (Олли Свенсон)
Arduino Uno: характеристики, распиновка, питание платы
Arduino UNO плата построена на микроконтроллере Atmega AVR для обучения, разработки, создания рабочих макетов устройств.
Размеры Уно
Arduino Uno R3 – самая популярная плата, построенная на базе процессора ATmega328. В зависимости от конкретной модели платы этой линейки используются различные микроконтроллеры, на момент написания статьи самой распространённой является версия именно R3.
Плату используют для обучения, разработки, создания рабочих макетов устройств. Ардуино, по своей сути, – это AVR микроконтроллер с возможностью упрощенного программирования и разработки. Это достигнуто с помощью специально подготовленного загрузчика, прошитого в память МК, и фирменной среды разработки.
Плата Ардуино УноРазмеры платы представлены на схеме ниже. Общие размеры Уно составляют 53,4 мм на 68,6 мм.
Характеристики
В основе платы лежит процессор ATmega 328. Кроме него на плате находится модуль USB для связи с компьютером и прошивки. Этот модуль называется «USB-TTL преобразователь». На фирменных платах Arduino Uno для этой целей используется дополнительный микроконтроллер ATmega16U2.
| Характеристики | Arduino Uno R3 |
|---|---|
| Микроконтроллер | ATmega328 |
| Рабочее напряжение | 5В |
| Напряжение питания (рекомендуемое) | 7-12В |
| Напряжение питания (предельное) | 6-20В |
| Цифровые входы/выходы | 14 (из них 6 могут использоваться в качестве ШИМ-выходов) |
| Аналоговые входы | 6 |
| Максимальный ток одного вывода | 40 мА |
| Максимальный выходной ток вывода 3.3V | 50 мА |
| Flash-память | 32 КБ (ATmega328) из которых 0.5 КБ используются загрузчиком |
| SRAM | 2 КБ (ATmega328) |
| EEPROM | 1 КБ (ATmega328) |
| Тактовая частота | 16 МГц |
Особенность этого чипа заключается в аппаратной поддержке USB, что позволяет организовывать связь без дополнительных преобразователей. В то время как ATmega328 не поддерживает такой функции, поэтому 16u2 выступает в роли преобразователя данных из USB в последовательный порт для МК AVR. В него залита программа для выполнения этой задачи.
Однако так происходит не всегда: в более мелких платах, таких как Arduino Nano, используют преобразователи уровней на базе различных микросхем, например FT232, CP21XX, Ch440g и подобных. Это решение является более дешевым и не требует прошивки дополнительного связывающего контроллера, как описано выше.
Внимание! Не всё так однозначно с DCcduino UNO r3 на ch440g. В ней как раз и использован более дешевый, чем в оригинале, вариант преобразователя USB-TTL.
На плате есть выход 3.3 В, он нужен для подключения периферии и некоторых датчиков, его пропускная способность по току равна 50 мА.
ATmega328 работает на частоте 16 МГц. Она фиксирована кварцевым резонатором, который вы можете, по желанию, заменить, тем самым ускорив работу Uno r3.
Важно! После замены кварцевого резонатора функции, связанные со временем, такие как Delay, не будут соответствовать введенным значениям. Это функция задержки времени, по умолчанию её аргументом является требуемое время задержки в мс. Функция прописана в библиотеках Ардуино, с учетом стандартной тактовой частоты в 16 МГц. Поэтому после замены кварца заданное время не будет соответствовать написанному. Для этого нужно либо подбирать опытным путем и устанавливать зависимости, либо править файлы библиотек.
Память Ардуино Уно
Микроконтроллер Arduino Uno содержит 32 кб флэш-памяти, из которой пользователю доступно 31.5 кб, потому как 0.5 занимает загрузчик.
- ОЗУ – 2 кб памяти.
- EEPROM — 1 кб памяти.
Как осуществляется питание платы?
Чтобы включить плату, нужно на неё подать питание либо от USB порта, можно прямо от ПК, либо от внешнего источника питания – от 7 до 15 Вольт. На плате установлен линейный стабилизатор, типа L7805, или же LDO. Он нужен для того, чтобы на микроконтроллер подавалось стабилизированное напряжение 5 В.
При этом приоритетно выбирается внешний источник питания, а не ЮСБ-порт. Внешнее питание подключается к выводу с пометкой «Vin» в разделе Power на плате.
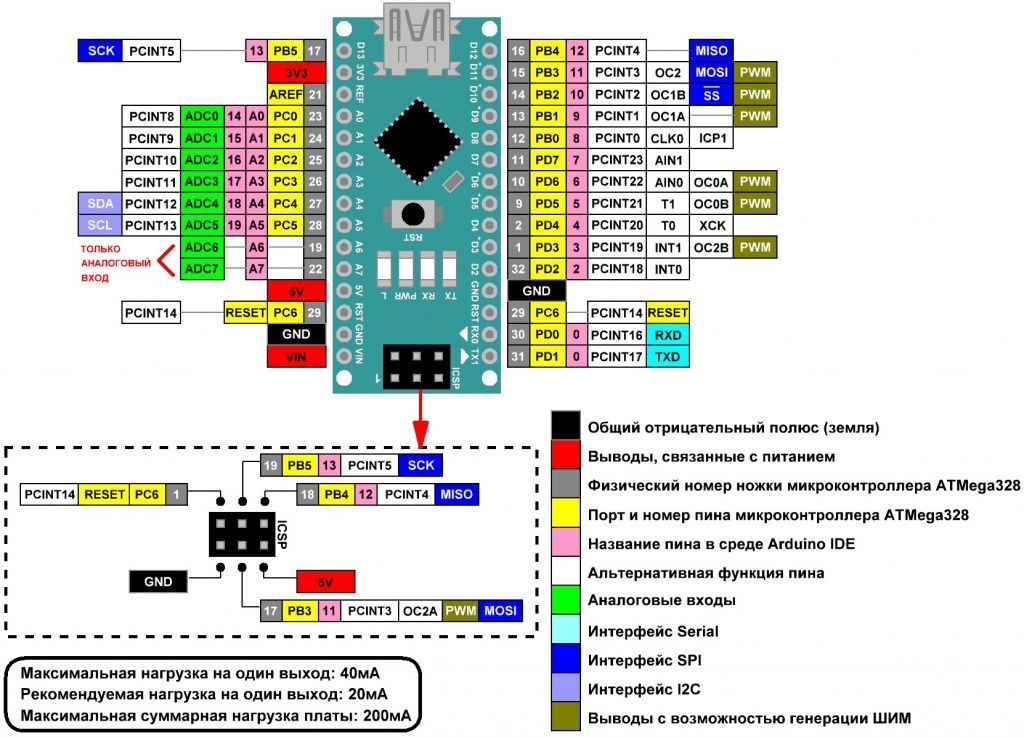
Расположение выводов, распиновка
Разработчики платы Arduino очень удобно и логично расположили выводы платы. Дело в том, что при разработке на «чистых» МК АВР приходилось обращаться к выводу порта, для этого нужно было запомнить название каждой ножки на чипе. Здесь это гораздо проще. На самой плате указано название каждого из пинов. Удобства добавляет и то, что пины разбиты на 3 группы:
- Digital – блок цифровых пинов.
- Analog – блок аналоговых пинов.
- Power – блок пинов, которые связаны с питанием и работой микросхемы.
При этом в разделе Digital пины, которые могут выдавать ШИМ-сигнал (PWM), помечены тильдой «~». Для служебных целей и проверки работоспособности контроллера на плате установлен светодиод, который подключен к 13-му выводу, а из среды разработки Arduino IDE к нему можно обращаться через встроенную директиву LED_BUILTIN. Такие схемы расположения пинов называются «Arduino UNO pinout», при этом, вместо UNO, может быть указано название другой платы, которая вас интересует.
Описание пинов платы
Микроконтроллер имеет 14 цифровых пинов, они могут быть использованы, как вход или выход. Из них 6 могут выдавать ШИМ-сигнал. Они нужны для регулировки мощности в нагрузке и других функций.
| Пин ардуино | Адресация в скетче | Специальное назначение | ШИМ |
|---|---|---|---|
| Цифровой пин 0 | 0 | RX | |
| Цифровой пин 1 | 1 | TX | |
| Цифровой пин 2 | 2 | Вход для прерываний | |
| Цифровой пин 3 | 3 | Вход для прерываний | ШИМ |
| Цифровой пин 4 | 4 | ||
| Цифровой пин 5 | 5 | ШИМ | |
| Цифровой пин 6 | 6 | ШИМ | |
| Цифровой пин 7 | 7 | ||
| Цифровой пин 8 | 8 | ||
| Цифровой пин 9 | 9 | ШИМ | |
| Цифровой пин 10 | 10 | SPI (SS) | ШИМ |
| Цифровой пин 11 | 11 | SPI (MOSI) | ШИМ |
| Цифровой пин 12 | 12 | SPI (MISO) | |
| Цифровой пин 13 | 13 | SPI (SCK) К выходу дополнительно подсоединен встроенный светодиод |
Вызов ШИМ-сигнала осуществляется через команду AnalogWrite (номер ножки, значение от 0 до 255). Для работы с аналоговыми датчиками присутствует 6 аналоговых входов/выходов.
| Пин | Адресация в скетче | Специальное назначение |
|---|---|---|
| Аналоговый пин A0 | A0 или 14 | |
| Аналоговый пин A1 | A1 или 15 | |
| Аналоговый пин A2 | A2 или 16 | |
| Аналоговый пин A3 | A3 или 17 | |
| Аналоговый пин A4 | A4 или 18 | I2C (SCA) |
| Аналоговый пин A5 | A5 или 19 | I2C (SCL) |
Их тоже можно использовать, как цифровые.
Аналоговый сигнал обрабатывается 10 битным аналогово-цифровым преобразователем (АЦП), а при чтении микроконтроллер выдаёт численное значение от 0 до 1024. Это равно максимальному значению, которое можно записать в 10 битах. Каждый из выводов способен выдать постоянный ток до 40 мА.
Принципиальная схема платы выглядит так (нажмите для увеличения):
Микроконтроллер ATMega 328
Как мы написали выше, ATmega328 работает на частоте 16 МГц. Распиновка микроконтроллера ниже (нажмите на изображение для увеличения):
Работа в комплексе с другими системами
Самое первое, с чем вы можете познакомиться, даже без приобретения дополнительных устройств для разработки – это связь по последовательному порту. Он активируется по команде Serial.begin (скорость, например 9600). Подробно о каждой команде вы можете прочитать в обучающем разделе на официальном сайте проекта Arduino.ru. Вы можете обмениваться с компьютером информацией. Плата, в зависимости от программного кода, может вам присылать данные, а вы их, через монитор портов в Arduino IDE, можете читать.
Кроме последовательного порта, в ардуино UNO реализована поддержка таких интерфейсов:
Через них можно осуществлять «общение» между несколькими платами, а также подключать разную периферию: датчики и дисплеи.
Платы расширения
В магазинах, специализирующихся на робототехнике и микроконтроллерах, можно встретить слово «шилд». Это специальная плата, которая напоминает Arduino Uno. Совпадает она с ней не только по форме, но и по количеству выводов.
Шилд устанавливается в клеммные колодки, при этом часть их них задействуется под функции шилда, а другая часть остаётся свободной для использования в проекте. В результате вы можете получить такой себе многоэтажный «бутерброд» из плат, которые реализуют множество функций.
Одним из самых популярных является Arduino Ethernet Shield. Он нужен для связи с Ардуино по обычному сетевому кабелю, витой паре. На нём расположен разъём rj45.
С подобным шилдом можно управлять вашим микроконтроллером по сети через веб-интерфейс, а также считывать параметры с датчиков, не отрываясь от компьютера. Существуют проекты с использованием такого комплекта в домашнем облачном хранилище, с ограничением по скорости, всё-таки Атмега328 слабовата для таких задач, и для этого лучше подойдут одноплатные компьютеры типа Raspberry pi.
Как преодолеть аппаратные ограничения
Большинство распространённых плат имеют аналогичные характеристики, среди них:
- Uno;
- Nano;
- Pro mini;
- и подобные.
Но с развитием ваших навыков разработки в этой среде появляется проблема нехватки мощности и быстродействия этой платформы. Первым шагом для преодоления ограничений является использование языка C AVR.
С его помощью вы ускорите на порядок скорость обращения к портам, частоту ШИМ и размер кода. Если вам и этого недостаточно, то вы можете воспользоваться мощными моделями с аналогичным подходом к разработке. Для этого подойдёт плата Arduino Mega2560. Еще более мощная – модель Due. В противном случае вам стоит ознакомиться с разновидностями одноплатных компьютеров и STM микроконтроллеров.
Ардуино Uno R3 – отличная плата для большинства проектов, которая служит для изучения устройств цифровой электроники.
Tweaking4All.com — Программирование Arduino для начинающих
Обзор этой главы
Полный обзор этого курса можно найти здесь: Обзор курса .
Что такое функции и зачем они нужны?
Теоретически нам не нужны функции… однако без функций наш код стал бы очень длинным и совершенно нечитаемым. Не говоря уж о; нам нужно было бы написать намного больше кода.
Мы уже работали с двумя функциями, которые необходимы для вашего Arduino: «setup ()» и «loop ()».
Но что такое функции и зачем они нужны? Или лучше сказать: почему они нам нравятся?
Функцию (также называемую подпрограммой ) можно рассматривать как набор инструкций, сгруппированных вместе, с учетом конкретной задачи.
Мы можем создать функцию, чтобы сделать наш код более читабельным, или потому, что мы хотим использовать эту конкретную задачу в нескольких местах нашей программы (программ).
На некоторых языках это называется «подпрограмма», потому что так оно и есть; воспринимайте это как отдельную небольшую программу.И, как и в случае с обычной программой, функция может иметь другие функции, определенные внутри нее, и это подводит нас к другой проблеме, на которую следует обратить внимание: функция имеет область видимости, как и в случае с переменными, — «область», в которой она может быть увиденным и использованным!
Я понимаю, что это немного сложно понять сразу, но об этом нужно помнить.
Мы можем определить функции, которые действительно возвращают результат (значение) или не возвращает результат .
Последний, не возвращающий результат, в других языках программирования называется «процедурой».Однако в языке C оба они называются просто «функцией».
Функция — это группа инструкций для определенной задачи.
Когда мы определяем нашу функцию?
- Когда код повторяется более одного раза в моей программе
- Если мой код станет на более читабельным с функциями
- Если мой код станет на более управляемым с функциями
- Если мы хотим повторно использовать фрагмент кода , например, в других программах
Давайте посмотрим на примере того, чем может быть функция — просто для понимания концепции.
Допустим, у нас есть собака, которую нужно выгуливать 4 раза в день: в , 8 утра, , , 12 вечера, , , 5 вечера, и в , 9 вечера, .
Задача выгула собаки включает:
— Надеть пальто
— Надеть собаку на поводок
— Выйти на улицу
— Прогуляться по парку 15 минут
— Вернуться внутрь
— Снять поводок dog
— Снимите пальто.
Теперь предположим, что наша программа справляется с повседневными задачами, когда дело доходит до выгула собаки:
, если 8 утра, то
— Наденьте пальто
— Наденьте собаку на поводок
— Выйдите на улицу
— Пройдите по парку 15 минут
— Вернитесь внутрь
— Снимите поводок с собаки
— Возьмите с пальто.
, если 12:00, то
— Наденьте пальто
— Наденьте собаку на поводок
— Выйдите на улицу
— Пройдите по парку 15 минут
— Вернитесь внутрь
— Снимите поводок с собаки
— Возьмите с пальто.
, если 17:00, то
— Наденьте пальто
— Наденьте собаку на поводок
— Выйдите на улицу
— Пройдите по парку 15 минут
— Вернитесь внутрь
— Снимите поводок с собаки
— Возьмите с пальто.
, если 21:00, то
— Наденьте пальто
— Наденьте собаку на поводок
— Выйдите на улицу
— Пройдите по парку 15 минут
— Вернитесь внутрь
— Снимите поводок с собаки
— Возьмите с пальто.
Наша программа довольно длинная, правда? И еще много повторяющегося кода…
Мы могли бы создать функцию, назовем ее «WalkTheDog ()» и определить ее следующим образом.
WalkTheDog ():
— Наденьте пальто
— Наденьте собаку на поводок
— Выйдите на улицу
— Пройдите по парку 15 минут
— Вернитесь внутрь
— Снимите поводок с собаки
— Возьмите с пальто.
Теперь наша программа будет выглядеть намного проще:
если 8:00, то
WalkTheDog ()
если 12:00, то
WalkTheDog ()
если 17:00, то
WalkTheDog ()
если 21:00, то
WalkTheDog ()
Вы видите, что наш код не только стал намного короче, но и стал более читабельным. — «функция» вызывается так, как если бы это была обычная инструкция.Фактически мы расширили наш «язык».
В большинстве сценариев использование ваших собственных функций приведет к также , что приведет к уменьшению на скомпилированной программы для вашего Arduino или компьютера, что позволит более эффективно использовать память, необходимую на вашем Arduino (или компьютере).
Но функции имеют также то преимущество, что если вы допустили ошибку на шагах выгула собаки, вам нужно изменить свой код только в одном месте: функции, которая делает ваш код более управляемым .Например, если мы забыли добавить «Разблокировать дверь» в качестве шага. Мы просто редактируем функцию WalkTheDog () вместо того, чтобы редактировать код в 4 разных местах в предыдущем коде.
Теперь, если у нас есть функция более общего назначения, мы можем даже поместить ее в так называемую библиотеку и повторно использовать функцию в других наших программах. Но подробнее о «библиотеках» в следующей части.
Обнаружена блокировка рекламыИмейте в виду, что:
- Функция подобна отдельной маленькой программе … внутри программы
- Функция может иметь внутри функции …
- Функция имеет « область » — как мы видели с переменными и константами.
Пожалуйста, рассмотрите возможность отключения блокировщика рекламы на нашем веб-сайте.
Мы полагаемся на эти объявления, чтобы иметь возможность запускать наш веб-сайт.
Конечно, вы можете поддержать нас и другими способами (см. Раздел «Поддержка нас» слева).
Создание собственных функций
Довольно легко определить наши собственные функции на языке C, который мы используем для программирования Arduino. Базовая структура выглядит так:
тип данных FunctionName (FunctionParameters) {
// код функции
}
Надеюсь, вы помните некоторые из DataTypes , которые мы упоминали в Части 3 — DataTypes.Если нет, не волнуйтесь, вы можете оглянуться назад, если хотите, но я также упомяну здесь некоторые детали.
Тип данных определяет, какие данные возвращаются функцией, и, к сожалению, не все типы данных подходят для использования в качестве возвращаемого значения для функций. Определенно избегайте массивов!
Наиболее распространенные типы данных для возвращаемого значения: boolean , int , char , float и void (другие типы также будут работать, например, double, long и unsigned).
Очевидно, что нашей функции требуется FunctionName , и нам нужно следовать тем же правилам именования, что и для переменных и констант:
Название функции :
- Должен начинаться с a буква (a, b,…, z, A, B,…, Z) или подчеркивание (_)
- Может содержать букв
- Может содержать знаков подчеркивания (с)
- Может содержать чисел
- НЕ МОЖЕТ содержать специальные символы, символы или пробелы
- — с учетом регистра !
Параметры функции — это ноль или более значений, которые мы хотим передать функции.Однако количество значений и тип данных этих значений фиксировано и определено как в нашем определении функции!
В некоторых диалектах C вам нужно будет «объявить» (объявить) или «определить» функцию до того, как она будет использована в коде. Компилятору необходимо «знать» о его существовании, прежде чем он сможет его использовать. Это похоже на , а не на , как в случае с C на Arduino, поэтому здесь он не рассматривается.
Мы использовали параметры функций и раньше, хотя вы могли не знать об этом полностью.Эти значения мы передаем в скобки, например, в этой строке: Serial.print ("Hello");
Здесь мы вызываем функцию «print ()» из объекта «Serial» и передаем параметр «Hello» (строку). Подробнее об объектах позже.
Следующий блок кода, между похвалами, — это то, что мы видели раньше, например, в функции «if» и различных типах циклов («for», «while» и «do… while…»).
Этот блок кода группирует инструкции для нашей функции.
Начнем с простой функции:
| 1 | void SayHello () { |
Эта функция, называемая SayHello (), принимает без параметров , поскольку между скобками () нет ничего.
Он также не возвращает значение, поскольку мы использовали специальный тип данных «void», что означает «ничего, разреженный воздух, нада».
«Тело» функции (блок кода) содержит инструкции для этой функции и просто выводит «Hello».
Пример того, как мы будем использовать это:
| 1 | пустая установка () { // устанавливаем скорость для последовательного монитора: Serial.begin (9600); для (int A = 1; A <= 5; A ++) { Скажи привет(); } } void loop () { void SayHello () { |
Большая часть этого должна показаться знакомой, я все равно надеюсь…
В конце кода вы видите, как мы определили нашу функцию «SayHello ()».
В цикле «for» вы видите, как мы вызываем нашу функцию 5 раз, что дает следующий результат:
Привет
Привет
Привет
Привет
Привет
Легко, правда?
Передача значения функции
Это был довольно простой пример, давайте рассмотрим пример, в котором мы фактически передаем параметр, где мы используем предыдущий пример включения 5 источников света с помощью цикла «for».
Для этого мы создаем новую функцию под названием «DoLights», которой мы хотим передать номер источника света, который необходимо включить.
Мы уже знаем, что это число является целым числом типа «int» (см. Также определение «A» в цикле «for»).
Мы также знаем, что он не вернет никаких значений, поэтому мы получаем эту функцию:
void DoLights (int LightNumber) {
Serial.print («Включить свет для света»);
Серийный.println (LightNumber);
}
Параметр «LightNumber» определяется как «int». Вы можете видеть, что есть определение переменной «LightNumber» внутри функции «DoLights». Когда мы передаем значение для этого параметра, значение будет скопировано в эту «новую» переменную.
Имея в виду «область действия», «LightNumber», очевидно, существует только в функции «DoLights».
Вызов нашей функции (строка 6) точно такой же, как и в предыдущем примере, однако на этот раз мы передаем значение переменной «A».Значение «A» копируется в переменную «LightNumber» — помните, что оно КОПИРОВАННЫЙ.
Всего этого вместе:
| 1 | пустая установка () { // устанавливаем скорость для последовательного монитора: Serial.begin (9600); для (int A = 1; A <= 5; A ++) { DoLights (A); } } void loop () { void DoLights (int LightNumber) { |
Вы видите, как переменная «LightNumber» используется в функции?
Но это был всего лишь пример того, как передать только одно значение. Как это работает, если нам нужно передать несколько значений?
В качестве иллюстрации мы добавим логическое значение, которое мы хотим передать нашей функции. Если это значение , истинно , тогда свет должен загореться, если false , свет должен погаснуть.
Для этого нам нужно разделить два значения, и для этого мы используем запятую (,).
Параметры в функции разделяются запятой,
как при определении функции, так и при ее вызове.
Как и для любого значения, которое мы хотели бы передать, нам снова нужно определить его тип данных (логическое) и имя (LightOn).
Я добавил оператор «if», чтобы функция могла включать и выключать свет — еще одна интересная особенность функций; мы можем написать их таким образом, чтобы они могли работать более чем для одного сценария.
Всего этого вместе:
| 1 | пустая настройка () { // устанавливаем скорость для последовательного монитора: Serial.begin (9600); для (int A = 1; A <= 5; A ++) { DoLights (A, истина); } для (int A = 1; A <= 5; A ++) { DoLights (A, ложь); } } void loop () { void DoLights (int LightNumber, boolean LightOn) { |
Как видите, сначала мы запускаем цикл for из 5 итераций, включая 5 индикаторов.
Значения, которые мы передаем, также разделяются запятой!
В следующем цикле for, также в 5 итерациях, мы выключаем свет.
Ваш результат должен выглядеть так:
Включите фары для света 1
Включите фары для света 2
Включите фары для света 3
Включите фары для света 4
Включите фары для света 5
Выключите фары для света 1
Выключите фары для света 2
Выключить освещение для освещения 3
Выключить освещение для освещения 4
Выключить освещение для освещения 5
Очевидно, что приведенные здесь примеры не очень хороши, когда дело доходит до более эффективного начала.Но когда вы начнете создавать свои первые, более крупные программы, вы увидите, насколько функции полезны для программиста.
Обнаружена блокировка рекламы Пожалуйста, рассмотрите возможность отключения блокировщика рекламы на нашем веб-сайте.
Мы полагаемся на эти объявления, чтобы иметь возможность запускать наш веб-сайт.
Конечно, вы можете поддержать нас и другими способами (см. Раздел «Поддержка нас» слева).
Возврат значения из функции
Итак, мы знаем, что функция может «получать» значения с помощью параметров. А что, если мы хотим, чтобы функция возвращала ответ или результат — например, из сложного вычисления?
Помните, мы использовали «void» в наших предыдущих определениях функций? Здесь мы определяем, каким будет возвращаемый результат.
Однако в самой функции нам действительно нужно «вернуть» этот тип значения, и для этого мы используем функцию « return ».
Если вы определяете функцию, которая будет возвращать определенный тип данных, вам нужно будет использовать оператор « return » для возврата значения, которое должно иметь тот же тип данных, что и определенный тип возвращаемого значения вашего функция…
В качестве примера можно привести один из предыдущих примеров, в котором мы вычислили «AllMyMoney», добавив то, что находится в нашем кошельке, и то, что находится в банке.Довольно тривиальная ситуация, поскольку мы можем вычислить это уже более эффективно, не создавая функции, но это хорошая иллюстрация. Очевидно, что как только вы начнете писать свои собственные программы, эти функции будут содержать гораздо более сложный код, чем этот.
Итак, мы создали функцию «CalculateMyMoney», которая принимает два параметра. Я намеренно назвал их по-другому, чтобы проиллюстрировать, что значения двух переменных (PocketMoney и Savings) КОПИРУЮТСЯ в имена переменных, которые мы определили в функции.Было бы хорошо дать имена переменных параметров одинаковые имена, если вы вспомните «область действия» переменных: переменные в функции не являются теми же переменными, что и переменные вне функции.
В функции мы складываем эти 2 значения и возвращаем результат «Итого». Это «возвращаемое» значение затем присваивается переменной «AllMyMoney».
Попробуйте этот код.
| 1 | пустая настройка () { // устанавливаем скорость для последовательного монитора: Серийный.begin (9600); // определяем наши переменные int PocketMoney; int Экономия; int AllMyMoney; // присваиваем значения // выводим значения на серийный монитор Serial.print ("Экономия ="); Serial.print ("AllMyMoney ="); void loop () { int CalculateMyMoney (int Wallet, int Bank) { Итого = кошелек + банк; возврат Итого; |
Функция с возвращаемым значением может рассматриваться как переменная. Так что везде, где мы можем использовать значение или переменную, мы также можем использовать функцию, которая возвращает значение, что я проиллюстрирую в этой слегка измененной версии.Посмотрите на строку 21… мы только что поместили вызов функции прямо туда как «параметр» для « Serial.println () »… и это работает! Таким образом, нам не нужно сначала назначать возвращаемое значение переменной.
Если вам нужен результат функции чаще, то сохранение его в переменной имеет смысл. В конце концов: вызов функции приведет к повторному выполнению ее кода, что будет лишним, если нам понадобится один и тот же ответ более одного раза.
Функция с возвращаемым значением может заменять обычное значение или переменную…
Каждый раз, когда мы вызываем функцию, выполняется ее код.Поэтому, если вам нужен результат более одного раза, подумайте о том, чтобы сохранить значение в переменной вместо повторного вызова функции.
| 1 | пустая настройка () { // устанавливаем скорость для последовательного монитора: Серийный.begin (9600); // определяем наши переменные int PocketMoney; int Экономия; // присваиваем значения // выводим значения на серийный монитор Serial.print ("Экономия ="); Serial.print ("AllMyMoney ="); void loop () { int CalculateMyMoney (int Wallet, int Bank) { Итого = кошелек + банк; возврат Итого; |
Здесь я настоятельно рекомендую поиграть с функциями.Создайте функцию самостоятельно, с возвращаемым значением или без него, и поэкспериментируйте.
Функции, вызывающие себя (рекурсия)
Этот абзац может показаться слишком сложным для начинающих — не стесняйтесь пропустить его, если вам кажется, что он для вас слишком сложен.
Функция может вызывать сама себя, это называется «рекурсией».
Вы, должно быть, думаете, что мы оказались в сумасшедшем городе — ну, не беспокойтесь, если рекурсия для вас слишком сложна. Это многовато для любого новичка и даже для некоторых опытных программистов.
Итак, в этом курсе мы оставим все как есть: то, что вы не будете использовать, пока не наберетесь опыта в программировании.
Recursion может быть очень мощным инструментом для написания ограниченного количества кода, но с потрясающими результатами. Например, определенная графика может быть сгенерирована с помощью рекурсии, как дерево ниже или так называемый треугольник Серпинского. (Источник изображения: Википедия — Дерево Brentsmith201 , Серпинский Wereon ).
Они нарисованы с помощью рекурсии.
Рекурсивное дерево
Треугольник Серпинского — Треугольник в треугольнике
Если вам все равно интересно… вот быстрый и простой пример, который менее сложен, чем два изображения выше.
Допустим, мы хотим сложить все целые числа для всех чисел от 1 до 5. Итак, мы хотим знать, сколько равно 1 + 2 + 3 + 4 + 5 (15).
Очевидно, мы можем сделать это очень просто, введя это вручную или используя цикл «for», но сегодня мы хотим усложнить задачу, поэтому используем этот сценарий в качестве примера рекурсии.
Мы собираемся создать функцию, которая начинается с «5» и складывает число под ним (4), затем прибавляет число под ним (3) и т. Д., Пока мы не добавим 1.
| 1 | int AddOneLess (int Number) { |
Итак, что делает эта функция, берет значение «Число».Если это число равно нулю, верните ноль. Если число не равно нулю, возьмите это число и вызовите функцию «AddOneLess» для числа минус 1.
Странно, правда?
Другими словами: эта функция будет начинаться с заданного числа и каждый раз добавлять предыдущее число до тех пор, пока оно не достигнет нуля (0).
Позвольте мне отобразить это по-другому, используя этот пример кода:
| 1 | пустая установка () { // устанавливаем скорость для последовательного монитора: Серийный.begin (9600); Serial.println (AddOneLess (5)); } void loop () { int AddOneLess (int Number) { |
Сначала мы вызываем AddOneLess (5).
Значение «Number» не равно нулю, поэтому мы делаем 5 + «AddOneLess (5-1)», и еще НЕТ возвращаемого значения, так как мы перешли к вызову функции AddOneLess (5-1).
В этом втором вызове значение Number равно 4, но все еще не равно нулю, поэтому мы добавляем 4 + AddOneLess (4-1) и снова вызываем AddOneLess, так что возвращаемого значения пока нет.
Это приводит к третьему вызову, в котором значение «Number» равно 3, но все еще не равно нулю, поэтому мы добавляем 3 + «AddOneLess (3-1)» — возвращаемого значения пока нет.
Это приводит к четвертому вызову, в котором значение «Number» равно 2, но все еще не равно нулю, поэтому мы добавляем 2 + «AddOneLess (2-1)» — возвращаемого значения еще нет.
Это приводит к пятому вызову, в котором значение «Number» равно 1, но все еще не равно нулю, поэтому мы добавляем 1 + «AddOneLess (1-1)» — возвращаемого значения еще нет.
Шестой вызов, однако, значение «Number» равно 0 (ноль), поэтому мы возвращаем «ноль».
Однако… мы возвращаем ноль в «области действия» пятого вызова, мы вернулись на один шаг назад, где значение «Number» равно 1, и где мы говорим: вернуть значение «Number» и возвращаемое значение вызов «AddOneLess (1-1)».
Таким образом, пятый вызов возвращает 1 (значение «Number») + 0 (возвращаемое значение AddOneLess (1-1)) = 1.
Теперь мы возвращаемся в область видимости четвертого вызова, где «Число» имело значение 2 и которое возвращает значение «Число» + возвращаемое значение «AddOneLess (2-1)», так что: 2 + 1 = 3.
Возвращаясь к области действия третьего вызова, «Число» имеет значение 3, а возвращаемое значение = 3 + 3 (возврат из «AddOneLess (3-1)») = 6.
При возвращении ко второму вызову «Число» принимает значение 4, поэтому возвращаемое значение = 4 + 6 = 10;
И, возвращаясь к исходному вызову, «Number» равно 5, а результат «AddOneLess (5-1)» стал 10. Таким образом, этот вызов возвращает 5 + 10 = 15.
Красиво и запутанно, правда?
Может быть, имеет смысл показать это так:
| 1 | 1-й вызов: AddOneLess (5) // в функции настройки () 2-й вызов: AddOneLess (4) // в вызове функции AddOneLess (5) 3-й вызов: AddOneLess (3) // в вызове функции AddOneLess (4) 4-й вызов: AddOneLess (2) // в вызове функции AddOneLess (3) 5-й вызов: AddOneLess (1) // в вызове функции AddOneLess (2) 6-й вызов: AddOneLess (0) // в вызове функции AddOneLess (1) Number теперь будет равно нулю! 5-й звонок: возврат = номер + результат 6-й звонок = 1 + 0 = 1 4-й звонок: возврат = номер + результат 5-й звонок = 2 + 1 = 3 3-й звонок: возврат = номер + результат 4-й звонок = 3 + 3 = 6 2-й звонок: возврат = номер + результат 3-й звонок = 4 + 6 = 10 1-й звонок: возврат = номер + результат 5-й звонок = 5 + 10 = 15 Окончательный возврат: = 15 |
Я знаю, что это сложно понять в первый раз, так что не беспокойтесь, если это вам не по зубам.Мне действительно пришлось серьезно подумать, чтобы даже поместить здесь это объяснение, но для всей полноты я все равно добавил его. Просто помните, что функция может вызывать сама себя и не мешает предыдущим вызовам. Каждый вызов функции получит свою «область видимости».
Просто практическое правило, которое следует иметь в виду при использовании рекурсии: всегда убедитесь, что в функции есть условие «выхода», чтобы функция не продолжалась вечно и не приводила к сбою вашего Arduino или компьютера … в конце концов, для каждого вызова область видимости хранится в памяти, и ваш Arduino имеет ограниченное количество этого.
При создании Рекурсивных функций :
ВСЕГДА убедитесь, что функция имеет условие « exit » для выхода из функции.
Если у вас есть вопросы, просто задавайте их ниже, в разделе комментариев, и имейте в виду: глупых вопросов нет! В какой-то момент нам всем пришлось начать!
Следующая глава: Программирование Arduino для начинающих — Часть 7: Строки
Развертывание функций Arduino на оборудовании Arduino с помощью функционального блока MATLAB — MATLAB и Simulink
Развертывание функций Arduino на оборудовании Arduino с использованием функционального блока MATLAB
В этом примере показано, как запрограммировать функциональный блок MATLAB для доступа к нескольким периферийные устройства на оборудовании Arduino ® .
Функциональный блок MATLAB позволяет вам реализовать пользовательские функции MATLAB в Модель Simulink ® . Вы можете использовать блок MATLAB Function для создания читаемых, эффективный и компактный код C / C ++, который можно развернуть на оборудовании Arduino.
Для подробного обзора функционального блока MATLAB см. Реализация функций MATLAB с использованием блоков и создание пользовательской функциональности с использованием функционального блока MATLAB.
Использование блока MATLAB Function для генерации кода обеспечивает:
Планирование и многозадачность — вы можете установить частоту дискретизации MATLAB Функциональный блок.Сгенерированный код работает на оборудовании в указанном частота дискретизации. В режиме многозадачности На , вы можете запускать разные блоки с разной скоростью на оборудовании. Дополнительные сведения см. В разделе Обработка каждой дискретной скорости как отдельной задачи.
Мониторинг и настройка — вы можете контролировать сигналы и настраивать параметры с помощью функция Monitor & Tune в Моделируйте Simulink и наблюдайте или регистрируйте выходной сигнал.
Поддерживаемое оборудование
Функциональные блоки MATLAB поддерживают генерацию кода на этих платах:
Arduino Due
Arduino Nano 3.0
Arduino Uno
Arduino Mega 2560
Arduino Mega ADK
Arduino
0 Arduino Leonardo
500 Arduino Леонардо
500 Arduino
Arduino MKR1010
Arduino MKR Zero
Необходимые продукты
Для развертывания функций на оборудовании Arduino с помощью функционального блока MATLAB требуются следующие пакеты поддержки:
Развертывание функций ввода-вывода MATLAB на оборудовании Arduino
Развертывание функции, которая устанавливает состояние вывода светодиода на основе его ввода, генерирует ШИМ-сигналы и считывание аналогового напряжения с помощью функций, перечисленных в разделе «Чтение и запись данных» (пакет поддержки MATLAB для оборудования Arduino).
Для настройки модели на плате Arduino:
Откройте модель Simulink. В командной строке MATLAB, введите:
>> arduino_matlab_codegen
На вкладке Оборудование щелкните Оборудование Настройки , чтобы открыть конфигурацию Диалоговое окно параметров .
Выберите панель Аппаратная реализация и выберите ваше оборудование Arduino на Аппаратная плата список параметров.Не меняйте никаких других настроек. Щелкните ОК .
Чтобы увидеть функцию, написанную в редакторе, дважды щелкните MATLAB Функциональный блок.
Чтобы построить модель и запустить ее на оборудовании, щелкните Build, Развертывание и запуск на Аппаратное обеспечение таб.
Чтобы выполнить мониторинг сигнала и настройку параметров, щелкните Monitor & Tune на Оборудование таб.Например, вы можете изменить Рабочий цикл ШИМ и наблюдать за сгенерированным сигналом ШИМ, или вы можете подключить аналоговые контакты к VCC или GND и регистрируют аналоговые напряжения в сфера.
Выполните предыдущие шаги для arduino_matlab_codegen_initblock модель. В этой модели все
конфигурации контактов, которые вы должны выполнить в начале выполнения программы, находятся в
блок init .Настройка контактов в init Блок выполняет функцию в функциональном блоке MATLAB
модульный.
Запустите функцию MATLAB
Перед развертыванием функции запустите функцию в Командном окне MATLAB. Ты тогда можно:
Убедитесь, что функция MATLAB взаимодействует с оборудованием как ожидал.
Выявление ошибок времени выполнения, таких как конфликты периферийных устройств, которые сложнее диагностировать во время развертывания.
Ограничения
Недопустимые выводы ШИМ
Эти номера выводов ШИМ не допускаются внутри функции MATLAB блокировать.
| Плата | Выводы ШИМ | |
|---|---|---|
| Arduino Mega 2560, Mega ADK | 9,10 | |
| Arduino Leonardo | , Micro | 03,11 |
| Arduino Due | 11,12 | |
| Arduino MKR1000, MKR WiFi 1010, MKR Zero | 4,5 |
Если вы используете функцию поддержки MATLAB из функции поддержки PWM Пакет для оборудования Arduino в функциональном блоке MATLAB, тогда не используйте контакты, перечисленные в эта таблица в блоках PWM Arduino из пакета поддержки Simulink для оборудования Arduino.Simulink требует таймера для планирования на оборудовании Arduino. Когда функция PWM используется в функциональном блоке MATLAB для генерации сигнала ШИМ выбирается таймер для планирования на оборудовании Arduino. Следовательно, выводы ШИМ, подключенные к этому таймеру, не могут быть использовал.
Connected I / O
Если вы запускаете Connected I / O на своей модели, которая имеет блок MATLAB Function с Функции чтения и записи данных (пакет поддержки MATLAB для оборудования Arduino) и другие функции Simulink Блоки Arduino, Connected I / O не работает в блоке MATLAB Function.Для другие блоки Simulink Arduino, Connected I / O работает нормально.
Конфликты ресурсов
Во избежание конфликтов ресурсов:
Перед тем, как получить доступ к периферийным устройствам Arduino, установите режим контакты с помощью
configurePin(пакет поддержки MATLAB для оборудования Arduino) для режим, который вы планируете использовать.Использование одного и того же вывода для разных периферийных устройств в модели может привести к неопределенному поведению.Например, если вы используете
readDigitalPin(пакет поддержки MATLAB для оборудования Arduino), чтобы считывать цифровой ввод с вывода в функциональном блоке MATLAB, то же самое контакт не допускается в качестве выходного контакта в другом блоке в вашем модель.
delay () Функция Arduino: жесткие циклы и код блокировки
Вы когда-нибудь создавали проект Arudino и хотели бы, чтобы что-то происходило в определенный промежуток времени? Может быть, каждые 3 секунды вы хотите, чтобы сервопривод перемещался, или, может быть, каждые 1 минуту вы хотите отправлять обновление статуса на веб-сервер.
Как вы это делаете? Есть ли простая и понятная функция, которая поможет нам в этом? Да, есть! Мы обсудим функцию задержки, а также функцию millis (), в видео ниже:
Это вторая часть нашей мини-серии о функциях millis (). Часть 1 помогает нам понять, что делает функция millis (), часть 2 обсуждает жесткие циклы и код блокировки, а часть 3 обсуждает, когда функция millis () затмевает функцию delay ().
Темы этого урока
- Петли тугие
- Код блокировки
- Древний рецепт вдохновляющей музыки
Миллис () по сравнению с задержкой ()
Итак, вы хотите, чтобы что-то происходило с заданным интервалом, и вы ищете решение. Если в вашем ответе используется функция задержки, то вы правы. Но есть другой способ.
Более крутым и красивым вариантом является функция Arduino millis (). И чем больше вы знакомы с использованием функции millis, которая помогает вам определять время событий в коде Arduino, тем легче будет позже включить другие части в вашу программу.
Как только вы начнете использовать функцию millis (), вы станете счастливее, веселее, и, черт возьми, вы понравитесь людям.
Узкие петли
Сначала давайте обсудим концепцию замкнутой петли. И когда мы говорим о замкнутом цикле, что это означает?
Давайте взглянем на скетч Arduino для демонстрации замкнутого цикла. Начиная с самого простого скетча, у нас есть только две функции: настройка void и цикл void. И, как вы, возможно, знаете, установка void запускается только один раз, а затем передает шоу в цикл void.
Цикл Void затем просматривает каждую строку кода, которая может находиться внутри цикла (внутри фигурных скобок).
Он выполняет первую строку, затем выполняет вторую, затем третью, и так далее и так далее, пока не дойдет до конца. И затем он возвращается наверх.
Как быстро он выполняет цикл? Это зависит от того, какую плату Arduino вы используете, но тактовая частота Arduino Uno составляет 16 мегагерц. Это означает, что каждую секунду на Arduino выполняется 16 миллионов инструкций!
Каждая строка кода не обязательно является одной инструкцией.На самом деле, скорее всего, это несколько инструкций. Но все же это относительно быстро (процессор вашего компьютера, вероятно, работает на гигагерцовых скоростях… это миллиарды).
Так вы считаете этот пустой набросок тесной петлей? Определенно, это так быстро и плотно, как вы можете сделать петлю. Поскольку внутри цикла нет ничего для выполнения, время, необходимое для прохождения эскиза, практически ничтожно. Другими словами, интервал от начала петли до финиша короткий (следовательно, быстрый или «плотный»).
Давайте добавим несколько строк кода. Мы начнем последовательную связь, а затем что-нибудь напечатаем в окне последовательного монитора.
Это тугая петля? То есть от начала до конца цикла занимает много времени? Это занимает очень мало времени, так что это быстрый и жесткий цикл.
Однако стоит отметить, что этот цикл не такой плотный, как в предыдущем примере. В предыдущем примере у нас не было кода. Так что это просто мчалось по петле.Теперь, когда у нас есть функция, последовательная печать, потребуется (крошечное) время, чтобы напечатать «Ice Ice Baby» на последовательном мониторе.
Но это все еще довольно быстрый цикл. Итак, давайте добавим еще немного кода. Программа будет проверять, нажата ли кнопка, и если это так, мы отправим что-то новое на монитор последовательного порта
.Итак, мы объявили кнопку и использовали оператор if, чтобы проверить, была ли нажата кнопка. Высокое напряжение на пятом контакте? Если да, то мы выводим что-нибудь еще в окно монитора последовательного порта.
Это тугая петля? Итак, от начала цикла до конца, это довольно быстро?
Да, все еще довольно быстро. Это довольно сложная петля. У нас есть четыре строчки кода. Мы выполняем печать на монитор последовательного порта, а затем быстро проверяем, не нажата ли кнопка. А если есть, то что-то распечатываем. По-прежнему плотно, по-прежнему быстро.
Теперь давайте добавим задержку в эту программу, используя функцию Arduino delay (). Как видно ниже, мы добавили в цикл задержку в тысячу миллисекунд (1 секунду).
Это все еще замкнутая петля? Много ли времени от начала до конца цикла? Нет, это определенно не замкнутая петля. Код запускается быстро, мы выполняем последовательную печать, но затем мы останавливаемся прямо на функции задержки.
Вся программа останавливается, пока мы ждем завершения этого кода задержки.
Когда Arduino доходит до этой строки кода, это похоже на поход в продуктовый магазин. Вы попадаете в строку с 12 или менее пунктами, но затем парень перед вами вытаскивает свою чековую книжку и начинает выписывать чек.Ты знаешь, что будешь там на минуту. Здесь то же самое.
Так что это не замкнутый цикл. Время от начала цикла до конца цикла довольно существенно. Особенно по сравнению с парой последних программ. Порядок времени огромен.
Теперь мы попытались продемонстрировать здесь, что вся идея о тесных петлях относительна. Все зависит от вашего приложения. Если вам нужно проверять состояние датчика каждые 10 миллионных долей секунды, то программа с тремя строками кода может быть недостаточно жесткой, это просто зависит от обстоятельств.
Еще один момент, который следует отметить, заключается в том, что не все строки кода занимают одинаковое время для выполнения. Если вы вызываете функцию, которая выполняет кучу вещей, например, последовательную печать, то эта одна строка кода может занять намного больше времени, чем 10 других строк кода.
Итак, плотность петли — понятие относительное.
Код блокировки
Когда программа останавливается в какой-то момент и требуется некоторое время для выполнения некоторого кода, этот код может называться блокирующим кодом .Это общий термин.
В нашей программе есть функция задержки, действующая как блокирующий код. Ни один код после задержки не может работать, пока задержка не закончится, поэтому он блокируется.
Блокирующий код действует не только тогда, когда мы используем функцию delay ().
Давайте возьмем нашу программу и избавимся от задержки, но мы добавим цикл for. Наш цикл for будет выводить числа и текст на последовательный порт.
Итак, как долго длится этот цикл? Он будет работать какое-то время, потому что ему нужно пройти 100 итераций, прежде чем он остановится.
А как насчет кода после этого цикла for? Может ли он работать? Нет, он должен ждать, потому что он блокируется циклом for.
Этот для цикла вложен в основной цикл . Цикл for — это «плотный» цикл? Прежде чем вы ответите, давайте еще раз подчеркнем, как вы должны думать об этом: много ли времени нужно, чтобы пройти этот цикл для цикла сверху вниз?
Ну, не совсем. У него всего две строчки кода.Так что это довольно сложный цикл.
Но это сложный цикл, который должен пройти множество итераций, прежде чем программа сможет перейти к коду под ним. Таким образом, даже жесткий цикл, если он должен выполняться через несколько итераций, может заблокировать нашего кода.
Подробнее о функции delay ()
Давайте поговорим еще об этой функции задержки. Что мы уже установили?
Во-первых, мы сказали, что функция задержки снижает плотность петли. Если у вас плотный цикл и вы добавляете функцию задержки, это займет больше времени и сделает его менее жестким.То есть время, необходимое для перехода от начала цикла до конца, увеличивается с функцией задержки.
Мы также знаем, что код функции задержки. Это идет рука об руку с тем, что мы только что сказали. Когда функция задержки запущена, она блокирует выполнение другого кода во время задержки.
Вы можете подумать, что эта функция задержки просто бездельник! В наших проектах это никогда ни к чему не приведет. Но для многих простых программ, которые мы пишем, функция задержки работает фантастически.Он прост в использовании, его действительно легко писать по буквам, и он делает именно то, что говорит.
Таким образом, нам не обязательно исключать функцию delay () из нашего набора инструментов программирования. Мы должны просто признать, что это простая функция программирования, которая может работать во многих случаях.Однако бывает время, когда вы начинаете сталкиваться с проблемами. Это связано с блокирующим эффектом, который функция задержки имеет в нашей программе.
В следующем уроке этой серии, часть 3, мы собираемся определить, где это действительно становится проблемой.Вы узнаете, когда имеет смысл использовать функцию delay () в программе, а когда пора переходить к использованию функции millis ().
Обзор
Сначала мы поговорили о герметичности петли. Мы сказали, что плотность петли относительна. Это зависит от вашего приложения.
Во-вторых, мы говорили о коде блокировки или коде, который блокирует. По сути, это общий термин, который мы можем дать коду, выполнение которого займет некоторое время, и он остановит выполнение других частей нашей программы во время ее выполнения.
Надеемся, вам понравился этот урок! В следующей части этой серии мы продолжим наше путешествие, изучая, как использовать функцию millis для создания синхронизированных повторяющихся событий в нашем коде Arduino. Увидимся в следующий раз!
Что нужно для написания хорошей библиотеки Arduino?
Написать приличную библиотеку непросто. Мнения разработчиков о том, как должна выглядеть такая библиотека, разнятся. Я думаю, что у надежной библиотеки должна быть подробная документация, а разработчики должны покрывать ее модульными тестами.Кроме того, достойная библиотека должна скрывать сложность и предлагать интуитивно понятный и простой в использовании интерфейс.
Большую часть времени я занимался разработкой программного обеспечения, работая над крупными проектами. Мы создали их на надежных фреймворках и в большинстве случаев также написали соответствующие модульные и интеграционные тесты. Я считаю, что хорошо написанные тесты могут сэкономить ваше время, которое вы в конечном итоге потратите на отладку и другие действия.
Я получил свой комплект Arduino около полутора лет назад и очень быстро понял структуру.Создатели создали Arduino для любителей и программистов-самоучок. С одной стороны, это привлекает к электронике большое сообщество людей; с другой стороны, качество публикуемого кода сильно различается. Когда мне требовалась какая-то библиотека для моих проектов Arduino, я часто проверял код на GitHub, который часто не поддерживался. Поддерживаемые библиотеки часто не имели надлежащей документации. У большинства из них не было модульных тестов.
Зачем вам тестировать свой код? Посмотрите следующее видео.
В 1996 году первый полет ракеты-носителя Ariane 5 закончился масштабной катастрофой, вызванной ошибкой программирования. Прочтите полную историю здесь.
Arduino не такая уж критичная и дорогая, но я все же считаю, что написание тестов того стоит. Обратной стороной является то, что это требует дополнительного времени на разработку. Я бы сказал, что каждый проект индивидуален, и вам нужно решить, стоит ли тратить время на написание тестов. На мой взгляд, тесты принесут вам большую пользу, если вы реализуете какой-то конечный автомат.Это повсеместно в Arduino, и тесты позволяют с уверенностью изменять код. Кроме того, библиотеки Arduino обычно крошечные, всего сотни строк кода по сравнению с тысячами строк в приложениях Android или где-либо еще. Чтобы тщательно протестировать свою библиотеку, вам часто нужно написать менее 10 тестовых примеров. Например, мне удалось написать модульные тесты для библиотеки реле менее чем за три часа, и я все еще учился использовать среду тестирования.
В настоящее время я работаю над долгосрочным проектом Arduino, который реализует полуавтоматическую коробку передач.Представьте себе рулевое колесо с двумя установленными рядом лопастями.
Racing Wheel, любезно предоставлено компанией JSC electronicsКогда водитель нажимает на весло справа, Arduino переключает передачу вверх, а когда он нажимает на весло слева, Arduino переводит рычаг вниз. Он также будет управлять сцеплением. В гонках быстрое реагирование имеет значение в лучшие времена и потенциально общие результаты.
Для обнаружения лопаточных прессов я изначально использовал библиотеку OneButton Arduino. Однако он не очень хорошо интегрировался с моей существующей кодовой базой, а также не транслировал такие события, что была отпущена какая-то кнопка.Подобные события очень важны для меня, потому что мне нужно знать, что какое-то действие произошло мгновенно. Задержка от 50 до 100 миллисекунд сильно влияет на задержку. В конце концов, я решил написать собственную библиотеку.
ObjectButton
ObjectButton — это библиотека Arduino для обнаружения общих действий кнопок при изменении на входных контактах GPIO. Эта библиотека должна легко интегрироваться с объектами C ++, отсюда и название.
Ограничения функции обратного вызова
Большинство библиотек Arduino позволяют подключать функцию обратного вызова, которая вызывается, как только происходит какое-либо действие.Обратный вызов обычно реализуется как указатель на функцию без входных параметров.
Копировать1extern "C" {
2 typedef void (* callbackFunction) (void);
3}
На практике вы зарегистрируете обратный вызов следующим образом:
Copy1 ...
2
3void onClick () {
4 Serial.println («Была нажата кнопка» );
5};
6
7
8 Кнопка OneButton = OneButton (INPUT_PIN, true);
9кнопка.attachClick (onClick);
Следующий подход отлично подходит для регистрации функций типа C, но не для функций-членов объекта C ++. Это потому, что все функции-члены имеют неявный (первый) параметр — это .
Чтобы обойти ограничение, вы можете:
- Передать адрес статической функции-члена, которая будет вызывать функцию-член, запущенную на конкретном объекте
- Создать некоторую функцию C вне любого объекта, которая будет вызывать функцию-член на объекте
Копия1...
Контроллер 2LedController = LedController ();
3
4void onClick () {
5 controller.turnLedOn ();
6};
Примечание. Лямбда / анонимные функции, насколько мне известно, недоступны в Arduino. Arduino не полностью поддерживает стандарт C ++.
Listeners
Вместо передачи ссылки на функцию обратного вызова ObjectButton представляет Listeners . Такой подход широко используется в Android.Мы определяем слушателя как абстрактный класс. Слушатель определяет контракт между нашей библиотекой и кодом, написанным пользователем.
Например, слушатель для получения событий onClick определяется следующим образом:
Копировать1class IOnClickListener {
2public:
3 virtual ~ IOnClickListener () = default;
4
5 виртуальная пустота onClick (ObjectButton & button) = 0;
6};
Пользователь пишет класс C ++, который наследуется от этого абстрактного класса.Вам необходимо реализовать все виртуальные функции. Когда вы регистрируете такой класс в библиотеке, внутренний код в библиотеке может безопасно вызывать функцию onClick (...) .
Копировать1 # include
2 # include
3
4class OnClickListener: частный виртуальный IOnClickListener {
= 5public:
6 OnClickListener (по умолчанию)
7 ....
8
9private:
10 void onClick (ObjectButton & button) override;
11...
12};
13
14void OnClickListener :: onClick (ObjectButton & button) {
15
16}
Вы зарегистрируете слушатель в библиотеке следующим образом:
Copy1
9000ton4 2ObjectButton (ObjectButton .);3
4OnClickListener onClickListener = OnClickListener ();
5button.setOnClickListener (onClickListener);
Как структурировать код
Когда вы пишете свою собственную библиотеку Arduino, это совершенно новый опыт по сравнению с написанием обычного проекта Arduino.На этот раз вы, , напишите код, который кто-то другой использует в своем проекте. В библиотеке нет функций setup () и loop () для реализации. Arduino дает вам рекомендации о том, как структурировать код. Некоторые из них являются обязательными, другие — необязательными, но рекомендуются. Ваша цель должна заключаться в том, чтобы сделать вашу библиотеку простой в использовании для всех, даже для новичков. Например, убедитесь, что у вас есть какая-то функция begin () , которая инициализирует ваш код. Вы часто видите этот шаблон в Arduino.
Предположим следующее о ваших пользователях:
- Они могут не иметь опыта программирования
- Они не понимают указатели
- Они не понимают, что такое конструктор и деструктор
- Они знакомы с
begin ()иend ()функции из других библиотек - Они ожидают, что имена функций будут camelCase, то есть
getPressure ()
Одна из ваших основных целей должна заключаться в том, чтобы скрыть всю сложность и предоставить множество примеров использования вашей библиотеки .Arduino предоставляет несколько справочных руководств; вы должны хотя бы проверить это:
После того, как вы узнаете своих пользователей и рекомендуете рекомендации сообщества Arduino, пора определить некоторые цели, которых необходимо достичь.
Цели для достижения
Как видите, охват модульных тестов и документация — это лишь некоторые из целей, которые необходимо достичь.
Абстракция высокого уровня
Когда вы пытаетесь придумать достойный дизайн библиотеки, начните с ручки и бумаги. В качестве вдохновения посмотрите официальные библиотеки Arduino.Все они хорошо написаны. Я кратко упомяну библиотеку Servo. Представьте, что вы хотите управлять сервоприводом. Какие функции вы хотели бы иметь? Возможно, вам понадобится какая-то функция, чтобы указать выходной контакт, к которому вы подключаете сервопривод. Вам также понадобится функция, которая сообщает серво, на сколько он должен повернуться, и функция, которая сообщает текущее положение вашего сервопривода. И это почти все, что вам нужно как пользователю. Вы не беспокоите пользователей подробностями реализации; все они скрыты.
В моем случае я хотел предоставить способ регистрации обратных вызовов, способ настройки интервала противодействия и способ настройки значений тайм-аута, используемых для обнаружения событий щелчка, двойного щелчка и длительного нажатия. В большинстве случаев пользователи просто регистрируют обратный вызов и не заботятся обо всех значениях по умолчанию, но рекомендуется дать пользователям возможность настроить поведение. Однако не раскрывайте все ценности. Вместо этого подумайте о сценариях использования и решите, что имеет смысл раскрывать. Как правило, после того, как я принял решение по дизайну, моя библиотека инициализируется 1 или 2 строками кода.Идеально! Не стесняйтесь проверить примеры использования библиотеки.
Еще одна вещь, о которой вам нужно подумать, — это структурировать код в отношении тестирования. Когда вы пишете код, постарайтесь продумать, как его протестировать. Как правило, вам следует избегать одного большого занятия. Вместо этого разбейте свой код на несколько более мелких классов. Позже вы можете протестировать их отдельно от остальной системы. Их функции должны делать только одно, а их имя должно подсказывать вам, что они должны делать, не читая документацию.В нормальных условиях эти функции короткие — менее десяти строк кода. Код, реализующий конечный автомат, обычно огромен. Однако вы можете перенести большую часть функциональности во вспомогательные функции. Когда вы это сделаете, ваш конечный автомат предоставит высокоуровневую картину того, что он делает. Вот пример из моего кода для уведомления слушателей о возникновении события клика.
Вместо этого кода:
Скопируйте1if (timeDelta> m_clickTicks) {
2 m_state = State :: BUTTON_NOT_PRESSED;
3 если (m_onClickListener! = Nullptr)
4 m_onClickListener-> onClick (* this);
5}
Вы перемещаете логику в другую функцию, например:
Копировать1if (timeDelta> m_clickTicks) {
2 m_state = State :: BUTTON_NOT_PRESSED;
3 notifyOnClick ();
4}
5
6
7void ObjectButton :: notifyOnClick () {
8 if (m_onClickListener! = Nullptr)
9 m_onClickListener-> onClick (* this);
10}
Если вы посмотрите на отредактированный код, вы с первого взгляда увидите, что он делает.В коде конечного автомата может быть много предложений if ... else ; все, что делает его более читаемым, — хорошо. Кроме того, теперь вы можете писать тесты в ObjectButton :: notifyOnClick () , что намного проще, чем писать тесты, которые проверяют тот же код в коде основного конечного автомата.
Если вы хотите увидеть пример более сложной библиотеки, которая обрабатывает права доступа, синтаксический анализ сообщений и многое другое, ознакомьтесь с нашей недавно опубликованной библиотекой автоматизации Adeon.Мы очень старались скрыть всю сложность и написали подробную документацию.
Документация
Итак, у вас есть библиотека, которая делает то, что вам нужно. В качестве следующего шага задокументируйте свой код.
Есть два подхода:
- Напишите документацию к вашему коду отдельно. Взгляните на библиотеку Sphinx, чтобы увидеть примеры. Sphinx использует reStructuredText в качестве языка разметки.
- Напишите документацию внутри вашего кода. Такой подход широко используется в мире Java и его генераторе документации Javadoc.
Я предлагаю объединить оба подхода. Начните с документирования того, что делает ваша библиотека. Включите блок-схемы, диаграммы и все, что вам может быть полезно. Markdown отлично подходит для этой цели. Более того, вы можете поместить свои документы в то же хранилище, что и ваш основной код. Например, вы можете создать папку docs для хранения этих документов. Если вы используете GitHub или GitLab, вы можете сохранять документы внутри Wiki. Технически это отдельный репозиторий git, но он привязан к вашему проекту и легко доступен.
После того, как вы написали общий обзор библиотеки, пора писать комментарии внутри вашего кода. Я решил использовать Doxygen: это стандарт де-факто, и его легко настроить. Кроме того, он поддерживает несколько стилей комментариев, включая стиль Javadoc.
Doxygen
Если вы хотите создать документацию Doxygen, вам нужно создать Doxyfile. Это шаблон для Doxygen с различными настройками, например, названием вашего проекта, расположением исходного кода и т. Д.Мне посчастливилось найти Doxyfile, который кто-то адаптировал для Arduino. Одной из важнейших настроек было включение файлов * .ino . Doxygen обычно не знает, что эти файлы содержат действительный код C / C ++. Если вам когда-нибудь понадобится этот шаблон, просто возьмите мой и измените имя и путь к проекту.
Если вы хотите узнать подробности о том, как добавлять комментарии в код, лучше всего проверить веб-страницу Doxygen.
Вот пример комментария внутри кода:
Копировать1
2
3
4
5
6
7IOnClickListener * m_onClickListener = nullptr;
8
9
10
11
12
13
14
15IOnDoubleClickListener * m_onDoubleClickListener = nullptr;
Комментарий Javadoc начинается с / ** , который по-прежнему является действительным комментарием C ++.Альтернативный синтаксис выглядит так: /// . Также обратите внимание на такие флаги, как @see . Это поможет вам создавать гиперссылки на другие классы и функции.
После того, как вы задокументировали свой код, создать документацию очень просто. В вашем Doxyfile есть вся информация.
Копировать1doxygen <путь к doxyfile>
Вы можете разместить сгенерированную документацию где угодно. Это статическая HTML-страница без внешних зависимостей. Я размещаю документацию на страницах GitHub бесплатно.Для вдохновения сгенерированная документация для одного из моих проектов находится здесь.
keywords.txt
Отлично, теперь у вас есть достойная документация. Ваша библиотека сейчас в лучшем состоянии, чем, может быть, 80 процентов библиотек. В качестве следующего шага создайте файл keywords.txt . Arduino IDE имеет минимальные возможности подсветки синтаксиса. Следовательно, нам нужно записать все функции, классы и переменные в этот файл и назначить правильный тип. Код будет выделен только тогда, когда IDE Arduino сопоставит ключевое слово с вашим определением.Создание файла keywords.txt является обязательным, если вы хотите, чтобы ваша библиотека была включена в официальный реестр библиотек Arduino.
Копия1 #####################################
2 # Типы данных ( KEYWORD1)
3 ####################################
4
5IOnClickListener KEYWORD1
6IOnDoubleClickListener KEYWORD1
7IOnPressListener KEYWORD1
8
9 ################################### ####
10 # Методы и функции (KEYWORD2)
11 ################################ ######
12
13getId KEYWORD2
14setOnClickListener KEYWORD2
15setOnDoubleClickListener KEYWORD2
Как видите, вы перечисляете все свои общедоступные типы данных, а затем назначаете один из классов, даже классы ключевые слова, например KEYWORD1 .Каждое ключевое слово соответствует разному цвету внутри Arduino IDE. Когда вам нужно создать этот файл, проверьте документацию или другие библиотеки.
Примеры
Наконец, вам нужно написать несколько примеров того, как использовать вашу библиотеку. Примеры необязательны, но они очень полезны для пользователей. Часто это первое, что люди ищут, когда ищут библиотеку. Вы можете получить к ним доступ прямо из Arduino IDE. Подумайте о некоторых основных задачах о том, как люди будут использовать библиотеку, а также попытайтесь написать хотя бы один расширенный пример.Чем больше примеров вы напишете, тем лучше для ваших пользователей.
Все примеры являются файлами проекта Arduino ( * .ino ), которые вы можете скомпилировать из Arduino IDE. Если вы работали с Arduino, я уверен, что вы более чем знакомы.
Для вдохновения взгляните на примеры из моей библиотеки.
Автоматическое тестирование
Теперь у вас есть библиотека, которая хорошо документирована и предположительно проста в использовании. В качестве следующего шага напишите несколько модульных тестов, чтобы убедиться, что ваш код выполняет то, что он должен делать.Автоматическое тестирование по-прежнему не характерно для библиотек Arduino, и я не удивлен. Если мы посмотрим на другие среды программирования, они часто поставляются с официальной средой тестирования или, по крайней мере, с хорошо известной сторонней средой. В Java и Android это JUnit; Python имеет встроенный модуль unittest, иногда люди также используют pytest; мир C ++ использует Googletest. Arduino не предоставляет официальной среды тестирования, и вы не найдете много статей по этой теме.
Ручное тестирование везде
Большинство разработчиков Arduino тестируют свой код вручную.Когда код в какой-то мере работает, он считается завершенным. Если они сломают код в будущих обновлениях, они могут долго этого не замечать. Не очень хорошая вещь!
Другой вариант использования — проверка того, что ваш код работает на нескольких аппаратных платах. Если вы протестируете его вручную на Arduino Uno, как вы узнаете, что ваша библиотека также работает на Леонардо? Если вы подтвердите свой код вручную на нескольких платформах, вы потеряете время. Если вы не отметите все поддерживаемые платформы, у вас нет гарантии, что код будет работать на всех досках.
Компиляция библиотеки для разных плат
Надеюсь, вы согласитесь, что автоматическая компиляция для нескольких плат имеет смысл. Его легко настроить, и поэтому я думаю, что каждая библиотека Arduino должна это делать!
У вас есть несколько вариантов, как это сделать:
Подход PlatformIO
У проектов PlatformIO всегда есть файл platformio.ini. Здесь вы определяете конфигурацию всего проекта, включая платформы, для которых вы создаете двоичные файлы. Каждая платформа представляет собой отдельную плату Arduino или даже другую архитектуру процессора.
Копия1; Arduino Uno: первая целевая плата
2 [env: uno]
3platform = atmelavr
4board = uno
5framework = arduino
6
7; Arduino Mega: вторая целевая плата
8 [env: megaatmega2560]
9platform = atmelavr
10board = megaatmega2560
11framework = arduino
Если вы хотите создать код для нескольких целевых платформ, просто введите следующие команды:
Копировать1
2pio run -e uno
3pio run -e megaatmega2560
Эти команды можно добавить в сценарий оболочки, который можно запускать повторно.Через несколько секунд вы узнаете, что ваш код компилируется или произошла ошибка.
Примеры подходов к сборке
Два других упомянутых варианта требуют, чтобы вы создали примеры эскизов, чтобы продемонстрировать, как использовать вашу библиотеку. Вы должны поместить эти примеры в папку examples , как определено в спецификации библиотеки Arduino. Когда вы запустите сценарий, он просмотрит все ваши примеры и скомпилирует их для всех перечисленных платформ. Когда Arduino IDE создает ваши примеры, она также создает вашу библиотеку.Это их зависимость.
Хотя написание примеров необязательно, в каждой хорошо поддерживаемой библиотеке должен быть хотя бы один. А когда вы это сделаете, подготовка вашего кода для работы со сценариями сборки займет считанные минуты. Я не вижу причин не использовать его!
Написание модульных тестов
Модульные тесты исследуют код вашей библиотеки изолированно. Иногда их сложнее написать, но плюсы преобладают над минусами.
Я нашел несколько сторонних фреймворков для тестирования для использования с Arduino:
Каждая из этих фреймворков поддерживает запуск тестов на собственных машинах, что означает, что вы можете запускать тесты на обычном ПК без подключенной к нему платы Arduino.Это полезно, особенно если вы хотите настроить непрерывную интеграцию на удаленном сервере.
Для ObjectButton я выбрал ArduinoCI в качестве среды тестирования. Но здесь нельзя сделать неправильный выбор. Просмотрите все варианты и решите, что лучше для вас.
Почему ArduinoCI?
ArduinoCI дает хороший обзор фреймворков для тестирования. Что привлекло мое внимание, так это то, что он поддерживает насмешку над оборудованием Arduino. Представьте, что вы хотите имитировать действие нажатия кнопки. Как это сделать, не нажимая физическую кнопку? Если у вас есть контроль над входными контактами и внутренним таймером, вы можете имитировать жест программно.И это то, что ArduinoCI предоставляет в наше распоряжение.
Кроме того, этот фреймворк компилирует все тесты в собственный код и поддерживает непрерывную интеграцию. Единственное, чего мне не хватает, так это отчетов о покрытии кода.
Модульные тесты ArduinoCI, выполняемые Travis CITest Features
Все ваши тестовые файлы помещаются в папку test . Вы обычно называете их протестированной функцией. ObjectButton должен уметь распознавать три типа различных действий.
Я создал три тестовых файла для их представления и один тестовый файл для проверки основных функций:
-
action_click.cppдля запуска всех модульных тестов, связанных с нажатием кнопки -
action_double_click.cppдля запуска модульных тестов, связанных с двойным щелчком -
action_press_release.cppдля запуска модульных тестов, связанных с нажатием кнопки, длительным нажатием и т. д. -
sanity_checks.cppдля проверки таких функций, какgetId, чтобы вернуть правильный идентификатор кнопки
Каждый тестовый файл содержит один или несколько модульных тестов, связанных с функцией. Вы можете записать все тесты в один большой файл, и ваши тесты будут работать нормально.Однако, если вы разделите их на несколько тестовых файлов по функциям, у вас будет точный контроль над запуском подмножества тестов. Кроме того, если один из ваших тестов не сработает, вы сможете найти его быстрее.
Написание модульного теста
Давайте проведем тест, который проверяет, правильно ли наша библиотека определяет действие щелчка.
Чтобы написать тест на действие щелчка, сначала нужно понять, что такое щелчок , . Вы когда-нибудь думали об этом? Обычно, когда мы пользуемся вещами, мы не рассуждаем, как именно они работают, но когда мы хотим протестировать действие клика, мы должны определить, что такое клик и как он будет обнаруживаться.Затем мы можем написать тест, чтобы зафиксировать поведение.
Определение: Щелчок — это действие, которое происходит, когда пользователь нажимает кнопку, а затем отпускает ее. Нажатие и отпускание должно произойти до истечения тайм-аута щелчка, а также кнопку не следует снова касаться в течение этого времени (возможно, это будет действие двойного щелчка).
Теперь, когда мы определили, что такое щелчок, мы можем имитировать щелчок в нашем тесте:
- Пользователь нажимает кнопку
- Пользователь отпускает кнопку
- Нажатие и отпускание кнопки произошло в течение определенного времени ожидания
нажатий
Ниже приведен реальный пример из моего набора тестов:
Копировать1unittest (receive_on_click_event_after_default_click_ticks) {
2 ListenerMock testMock = ListenerMock (INPUT_PIN, true);
3 GodmodeState * state = GODMODE ();
4
5
6 state-> digitalPin [INPUT_PIN] = LOW;
7 testMock.getButton (). Tick ();
8
9
10 состояние-> микросхемы = (DEFAULT_DEBOUNCE_TICKS_MS + 1) * 1000;
11 testMock.getButton (). Tick ();
12
13
14 состояние-> digitalPin [INPUT_PIN] = HIGH;
15 состояний-> микросхемы = (DEFAULT_CLICK_TICKS_MS + 1) * 1000;
16 testMock.getButton (). Tick ();
17
18
19 testMock.getButton (). Tick ();
20
21
22 assertEqual (1, testMock.getPressEventsReceivedCount ());
23 assertEqual (1, testMock.getReleaseEventsReceivedCount ());
24 assertEqual (1, testMock.getClickEventsReceivedCount ());
25 assertEqual (0, testMock.getDoubleClickEventsReceivedCount ());
26 assertEqual (0, testMock.getLongPressStartEventsReceivedCount ());
27 assertEqual (0, testMock.getLongPressEndEventReceivedCount ());
28}
Состояние: пользователь нажал кнопку В этом случае мы считаем кнопку нажатой, когда уровень напряжения на входном контакте равен 0 вольт.Благодаря ArduinoCI мы можем легко смоделировать это:
Copy1state-> digitalPin [INPUT_PIN] = LOW;
состояние — это указатель на структуру ArduinoCI, которая управляет «виртуальным» Arduino, запускающим наш тест.
Итак, мы нажали кнопку, и нам нужно отпустить ее через определенное время. Если бы мы просто изменили напряжение на входном контакте, внутренний таймер все равно вернул бы то же значение — 0. Практически не прошло времени. Чтобы смоделировать время, нам нужно установить микрон, i.e .:
Копировать1state-> micros = (DEFAULT_DEBOUNCE_TICKS_MS + 1) * 1000;
Обратите внимание, что вы управляете таймером, задавая время в микросекундах, а не в миллисекундах (как используется функцией миллис () ).
Состояние: пользователь отпустил кнопку Пользователь некоторое время удерживает кнопку; пора выпустить его.
Копировать1state-> digitalPin [INPUT_PIN] = HIGH;
2state-> micros = (DEFAULT_CLICK_TICKS_MS + 1) * 1000;
Мы только что установили входной контакт на 3.3 Вольта, что имитирует отпускание кнопки. При необходимости вы также можете сместить внутренний таймер, чтобы смоделировать реальный сценарий.
Обнаружила ли библиотека действие щелчка? Наш модульный тест точно имитирует действие щелчка. Если наша библиотека работает правильно, она уведомит наш OnClickListener об этом действии. Обычно мы проверяем результаты в конце теста:
Copy1assertEqual (1, testMock.getClickEventsReceivedCount ());
Приведенный выше код проверяет, отправил ли ObjectButton ровно одно уведомление о событии щелчка.Чтобы фиксировать все события, о которых сообщает моя библиотека, я создал вспомогательный слушатель, зарегистрированный для всех событий, поддерживаемых библиотекой. Этот слушатель увеличивает внутренний счетчик каждый раз при получении события. Это показывает, что вы не ограничены только фреймворком, но можете расширить фреймворк в соответствии со своими конкретными потребностями.
Доверие
Почему полезно иметь модульные тесты? Это уверенность в том, что мой код делает то, что должен. Как и в предыдущем тестовом примере, вы пишете другие тесты.Они должны фиксировать ожидаемое поведение — то, что вы указали, что ваша библиотека должна делать — и проверять, что ваша библиотека делает это.
Написание тестов занимает много времени, а их запуск — нет. Вы можете повторно запустить набор тестов в течение нескольких секунд. Это особенно полезно, когда вы работаете над новой функцией и хотите убедиться, что вы не повлияли на существующие функции, вызвав ошибку. В случае ObjectButton, вся внутренняя логика выполняется в конечном автомате. Те из вас, кто реализовал государственную машину, знают, насколько это может быть утомительно.Иногда на первый взгляд непонятно, что делает код. Если вы измените реализацию конечного автомата, высока вероятность появления ошибки. Но если у вас есть рабочий набор тестов, вы можете убедиться, что все по-прежнему работает, и вы всегда можете быть уверены в своем коде.
Новая функция == новые тесты
Если вы реализуете новую функцию, которая изменяет поведение существующей библиотеки или добавляет новую функциональность, вам также следует написать новые модульные тесты или адаптировать существующие.Поддержка вашего набора тестов должна быть регулярной частью вашей практики разработки. В противном случае со временем ваша уверенность упадет только потому, что вы не тестировали новую функциональность.
Заключение
В этом посте я написал о необходимых действиях для создания качественных библиотек Arduino. Эти принципы применимы и к вашим проектам. Вы все равно должны задокументировать, что делает ваш код, и хотя бы подумать о написании некоторых тестов. Вы можете запустить набор тестов из командной строки.Веб-разработчики знакомы с рабочим процессом.
Даже если вы задокументировали и протестировали свой код, у вас все равно есть над чем поработать. В следующий раз я объясню, как автоматизировать рабочий процесс и настроить непрерывную интеграцию для вашего репозитория, чтобы автоматически запускать тесты и создавать документацию после каждой фиксации.
Если у вас есть вопросы или у вас есть ощущение, что я что-то забыл, дайте мне знать в комментариях. Спасибо!
Список функций для пакета arduino
Ардуино
Базовая реализация Octave расширения matlab arduino, позволяющая связываться с запрограммированной платой arduino для управления ее оборудованием.
Выберите категорию: Общие функцииФункции ArduinoФункции Arduino I2CФункции поворотного энкодера ArduinoФункции сервопривода ArduinoФункции регистра сдвига ArduinoФункции SPI для ArduinoПоследовательные функции ArduinoФункции устройств ArduinoУльтразвуковые функции ArduinoДополнения ArduinoПакет Arduino 9 / Пакет ArduinoДатчики
Общие функции
Откройте инструмент конфигурации / программирования arduino, чтобы запрограммировать оборудование arduino для использования с функциями Octave arduino.
Проверить, является ли входное значение объектом Arduino
Получить список всех известных модулей библиотеки Arduino, которые доступны.
Система сканирования запрограммированных плат Arduino.
Функции Arduino
Проверить, что адрес данного адреса отвечает на шину I2C
Установить / получить режим вывода для указанного вывода на соединении Arduino.
Установить / получить режим вывода для указанного вывода на соединении Arduino.
Уменьшает счетчик именованного ресурса на 1 и возвращает новое значение.
Бесплатные ресурсы объекта Arduino.
Подробно отобразите объект Arduino, показывая плату и доступные контакты.
Получить список ячеек с доступными идентификаторами контактов, которые используются для режима I2C.
Получение списка ячеек с доступными идентификаторами контактов с функцией прерывания
Получить список ячеек с доступными идентификаторами контактов, которые изначально подключены к светодиодам.
Получите MCU, используемый подключенным Arduino.
Получить список ячеек с идентификаторами контактов, доступных для использования с ШИМ.
Получите фактическое имя вывода из псевдонима вывода.
Получите информацию о контактах из значений входных контактов.
Получите имена контактов из значений входных клемм.
Получите количество использований данного ресурса.
Получить владельца пина, ранее назначенного configurePinResource.
Получить список ячеек с идентификаторами контактов, доступных для режима SPI.
Получить список ячеек с идентификаторами выводов, доступных для сервопривода.
Получить значение свойства из заданного ресурса.
Получить режим вывода, ранее назначенный configurePinResource.
Получите номер клеммы для каждого контакта.
Увеличивает значение счетчика именованного ресурса на 1 и возвращает новое значение счетчика
Вернуть истину, если вывод поддерживает аналоговый вход
Вернуть истину, если вывод может выполнять цифровые функции
Воспроизвести тон заданной частоты на указанном контакте.
Считайте аналоговое напряжение PIN.
Считывание цифрового значения с цифрового вывода ввода / вывода.
Считайте аналоговое напряжение пина.
Отправить команду сброса на оборудование Arduino, чтобы принудительно выполнить сброс оборудования.
Отправить команду с данными о параметрах на подключенный Arduino, ожидая ответа до указанного количества секунд.
Установить значения свойств для данного ресурса.
Получите количество секунд, в течение которых плата Arduino работала одновременно.
Подтвердить, что режим разрешен для указанного вывода
Получить версию кода библиотеки, установленного на плате Arduino
Записать цифровое значение на цифровой вывод ввода / вывода.
Установите вывод для вывода прямоугольной волны с заданным рабочим циклом.
Эмулируйте приблизительное напряжение на выводе с помощью ШИМ.
Создайте объект Arduino с подключением к плате Arduino.
Функции Arduino I2C
Сканировать arduino на наличие устройств на шине I2C.
Бесплатные ресурсы объекта i2cdev.
Показать объект i2cdev.
Считывает указанное количество байтов из объекта i2cdev, используя необязательную точность для размера байтов.
Считывает указанное количество байтов из регистра объекта i2cdev, используя необязательную точность для размера байта.
subref для i2cdev
Записать данные в объект i2cdev, используя необязательную точность байта данных, используемого для данных.
Записывать данные в объект i2cdev в заданную позицию реестра, используя необязательную точность байта данных, используемого для данных.
«i2cdev» устарела и будет удалена в будущей версии.
Свободные ресурсы объекта устройства.
Объект устройства отображения.
Прочтите указанное количество байтов из объекта i2c или последовательного устройства, используя дополнительную точность для размера байта.
Считывает указанное количество байтов из регистра объекта i2cdev, используя необязательную точность для размера байта.
subref для устройства
Записать данные в объект I2C или последовательного устройства, используя дополнительную точность байта данных, используемого для данных.
Записывать данные в объект устройства i2c в заданную позицию реестра, используя необязательную точность байта данных, используемого для данных.
Функции поворотного энкодера Arduino
Свободные ресурсы объекта кодировщика.
Подробное отображение объекта поворотного энкодера,
считывает значение счетчика поворотного энкодера.
считывает скорость вращения с энкодера.
сбросить значения счетчика поворотного энкодера
subref для RotaryEncoder
Создайте объект rotaryEncoder, управляемый входными контактами.
Функции сервопривода Arduino
Свободные ресурсы сервообъекта.
Отобразить сервообъект.
Считывание положения сервопривода
subref для сервопривода
Записать положение в сервопривод.
Создайте сервообъект, используя указанный вывод на плате Arduino.
Функции регистра сдвига Arduino
Свободные ресурсы объекта shiftRegister.
Подробно отобразить объект реестра,
считывает значение из сдвигового регистра.
очистить значение регистра сдвига.
Записать значение в сдвиговый регистр.
subref для регистра смены
Создать регистр сдвига заданного типа, управляемый входными контактами.
Функции SPI для Arduino
Бесплатные ресурсы объекта spidev.
Показать объект spidev.
subref для spidev
Записать данные uint8 в устройство spi и вернуть обратно синхронизированные данные ответа того же размера.
spidev устарело и будет удалено в будущей версии.
Свободные ресурсы объекта устройства.
Объект устройства отображения.
subref для устройства
Записать данные uint8 в устройство spi и вернуть обратно синхронизированные данные ответа того же размера.
Последовательные функции Arduino
Свободные ресурсы объекта устройства.
Объект устройства отображения.
Очистить буферы последовательного порта
Прочтите указанное количество байтов из объекта i2c или последовательного устройства, используя дополнительную точность для размера байта.
subref для устройства
Записать данные в объект I2C или последовательного устройства, используя дополнительную точность байта данных, используемого для данных.
Создайте объект i2c, spi или последовательный порт для связи на подключенном Arduino.
Функции устройства Arduino
Свободные ресурсы объекта устройства.
Объект устройства отображения.
Очистить буферы последовательного порта
Прочтите указанное количество байтов из объекта i2c или последовательного устройства, используя дополнительную точность для размера байта.
Считывает указанное количество байтов из регистра объекта i2cdev, используя необязательную точность для размера байта.
subref для устройства
Записать данные в объект I2C или последовательного устройства, используя дополнительную точность байта данных, используемого для данных.
Записать данные uint8 в устройство spi и вернуть обратно синхронизированные данные ответа того же размера.
Записывать данные в объект устройства i2c в заданную позицию реестра, используя необязательную точность байта данных, используемого для данных.
Создайте объект i2c, spi или последовательный порт для связи на подключенном Arduino.
Ультразвуковые функции Arduino
Бесплатные ресурсы ультразвукового объекта.
Отображение ультразвукового объекта.
subref для ультразвуковой
Считайте расстояние с помощью ультразвукового прибора
Измерьте время, в течение которого волны отражаются обратно в ультразвуковое устройство
Создание ультразвукового объекта для связи с подключенным ультразвуковым устройством
Дополнения для Arduino
Создайте объект надстройки, используя надстройку с именем class.
Базовый пример кода matlab / octave для иллюстрации создания пользовательского дополнения.
Базовый пример октавного аддона для ЖК-дисплея
МодульEEPROM для Arduino
DS1307 аддон
Аддон моторного щита Adafruit
Класс двигателя постоянного тока для управления двигателем постоянного тока на моторном щите Adafruit
Класс шагового двигателя для управления шаговым двигателем на моторном щите adafruit
Датчики Arduino
Датчик часов реального времени DS1307
MCP3002 Датчик АЦП
SI7021 датчик температуры и влажности
Тонкая обертка для аналогового датчика UV-B GUVAS12SD
Пакет ввода-вывода Arduino
Базовый класс, используемый для датчиков библиотеки Arduino
Получить компонент каталога в имени пути.
Получить список файлов, используемых для сборки библиотеки arduino
Базовый класс, используемый для плагинов библиотеки Arduino
Вернуть конфигурацию для известного типа платы Arduino
Тестовые функции
Установите на Arduino необходимые библиотеки ядра для запуска тестов BIST
Пакет: arduino
Arduino Uno R3 Технические характеристики / функции | Spiceman
В этой статье мы подробно объясним характеристики и функции Arduino Uno R3 (Arduino Uno).
Arduino Uno — самая представительная и базовая версия из более чем 20 редакций.
Технические характеристики Arduino Uno
| Технические характеристики | Arduino Uno |
|---|---|
| Размер платы | 74,9 × 53,3 мм |
| Микроконтроллер / Тактовая частота | ATmega328P / 16 МГц |
| SRAM (основная память) | 2кБ |
| Флэш-память | 32кБ |
| EEPROM | 1кБ |
| Рабочее напряжение | + 5В |
| Входное напряжение (рекомендуемое) | + 7 ~ + 12В |
| Выходное напряжение | + 5В, +3.3В |
| Цифровые контакты ввода / вывода | 20 |
| Выводы цифрового ввода / вывода ШИМ | 6 |
| Аналоговые входные контакты | 6 |
| Контакты аналогового выхода (DAC) | – |
| Номинальный ток на вывод | 40 мА / контакт |
| Контакты для записи программ | USB типа B ICSP |
| Интерфейс | UART I2C SPI |
Технические характеристики плат Arduino, отличных от Arduino Uno, см. В следующей статье.
Функции Arduino Uno
Внешний вид Arduino Uno
↑ Щелкните для увеличения.
①Микроконтроллер (микрокомпьютер)
В микроконтроллере (микрокомпьютере) Arduino Uno используется «ATmega328P» от Microchip Technology (США).
Микроконтроллер (микрокомпьютер) — очень важный компонент в управлении электронными устройствами, которые соответствуют человеческому «мозгу».
Кроме того, в микроконтроллер встроены различные запоминающие устройства, такие как SRAM, флэш-память и EEPROM.
②USB-порт
Вы можете обмениваться данными между Arduino Uno и ПК, подключив его к USB-порту Arduino Uno и ПК с помощью USB-кабеля.
Вы можете написать программу (скетч), созданную на вашем ПК, на Arduino Uno и управлять Arduino Uno с вашего ПК через последовательную связь.
Вы также можете запитать Arduino Uno через USB вместо разъема питания.
③Подъемник Power Jack
Вы можете подключить адаптер переменного тока (внешний диаметр 5,5 мм, внутренний диаметр 2.1 мм) для питания Arduino Uno.
④ Кнопка сброса
Вы можете перезапустить Arduino Uno, нажав кнопку сброса. Используйте это, если вы хотите перезапустить программу с самого начала или когда Arduino Uno ведет себя странно.
⑤ Порт ввода / вывода ・ Питание
Цифровой ввод / вывод ・ ШИМ
| Цифровой ввод / вывод ・ ШИМ | Пояснение |
|---|---|
| D0-D19 | Цифровой вход / выход (0-19) ВЫСОКИЙ (+ 5 В) / НИЗКИЙ (0 В) |
| ШИМ | Аналоговый выход от 0 до +5 В Аналоговый выход с переключением между 0 В и + 5 В на высокой скорости |
ШИМ и последовательная связь используются совместно с цифровым вводом / выводом.Вы можете указать, какой из них использовать в программе.
Аналоговый вход
| Аналоговый вход | Пояснение |
|---|---|
| A0-A5 | Аналоговый вход (0-5) 10-битный аналого-цифровой преобразователь (изменение на 1 шаг каждые 4,8 мВ) |
Связь
| Связь | Пояснение | |
|---|---|---|
| UART (последовательная связь) | TX | Последовательная передача данных |
| RX | Прием последовательных данных | |
| I2C | SCL | Последовательные часы |
| SDA | Последовательная передача / прием данных | |
| SPI | SS | Выберите устройство для управления |
| SCK | Последовательные часы | |
| MOSI | Master ⇒ Slave передача данных | |
| MISO | Slave ⇒ Master передача данных | |
Мощность
| Мощность | Пояснение |
|---|---|
| Вин | Напряжение «jackPower jack» выдается, Питание может подаваться от «Vin» без использования разъема питания. |
| ЗЕМЛЯ | Земля / Контрольная точка |
| + 5В | Выход напряжения + 5В |
| + 3,3 В | Выход напряжения + 3,3 В |
Другое
| Другое | Пояснение |
|---|---|
| ЗЕМЛЯ | Земля / Контрольная точка |
| AREF | Опорное напряжение аналогового входа (вход от 0 до +5 В), Обычно не используется |
| СБРОС | Сброс (та же функция, что и «Кнопка сброса») |
| IOREF | Выход напряжения + 5В |
⑥Светодиодный индикатор
| Светодиод | Пояснение |
|---|---|
| ВКЛ | Загорается при питании Arduino Uno |
| TX | Мигает при отправке по последовательному каналу связи |
| RX | Мигает при получении по последовательному каналу связи |
| л | Подключение к цифровому входу / выходу No.13 |
Arduino Uno имеет 4 светодиода (части микросхемы). Индикатор «L» подключен к 13-му цифровому входу / выходу и может быть включен, установив 13-й контакт в положение ВЫСОКОЕ (5 В) в программе.
⑦ICSP
Arduino Uno имеет два терминала ICSP, для «ATmega328P» и «ATmega16U2».
для ATmega328P
Подключив ICSP-совместимый писатель (устройство записи программ), вы можете писать программы (эскизы) непосредственно на «ATmega328P», который является микроконтроллером (микрокомпьютером) Arduino Uno.
Однако, поскольку вы обычно можете писать программы (скетчи) через порт USB, я думаю, что он редко используется для написания.
Кроме того, он также может использоваться как терминал SPI.
для ATmega16U2
Подключив ICSP-совместимый писатель (устройство записи программ), вы можете записывать эскизы (программы) непосредственно на «ATmega16U2», который представляет собой ИС для преобразования последовательного порта USB в Arduino Uno.
Следовательно, вы можете создать устройство для USB, но оно используется редко, потому что оно не может быть записано с помощью Arduino IDE.
Как получить технические данные для Arduino Uno
Различные технические материалы по Arduino Uno можно получить на официальном сайте Arduino.
Технические характеристики Arduino Uno
- ФАЙЛЫ EAGLE
- СХЕМЫ: Формат PDF
- РАЗМЕР ПЛАТЫ Данные: формат DXF
1
Сначала перейдите на официальный сайт Arduino по ссылке ниже.
2
Щелкните «ДОКУМЕНТАЦИЯ».
3
Щелкните каждый значок, чтобы загрузить «EAGLE FILES», «SCHEMATICS» и «BOARD SIZE Data».
Понимание строк в Arduino — платформа Arduino
Зная, что такое строки, зачем вам вообще использовать символьную строку, строку (строчные буквы s). Кажется, что с классом String можно многое сделать.
Использование строковых объектов также имеет недостатки.Кодирование в Arduino Strings проще, чем использование символьных строк, но это достигается за счет сложного кода в String Library, который предъявляет большие требования к вашему Arduino.
В символьной строке каждый символ — это просто байт. Итак, если у вас есть массив с 4 символами, будет использовано 4 байта или 5 байтов, если вы посчитаете завершающий нулевой символ (подробнее об этом в учебнике c-string). Строковый объект получит больше байтов, чем это, поскольку для достижения того же результата требуется гораздо больше усилий.
Если вы используете C-строку, вы контролируете использование памяти: вы выделяете фиксированный объем памяти и не получаете утечек памяти. Скетч Arduino будет иметь такой же объем памяти, доступный как в начале, так и в конце программы.
Однако с c-струнами есть одна большая проблема. C-строки не помешают вам изменять память за пределами измерения массива. Поэтому, если вы выделяете память, например, за пределами массива, вы можете сделать это в своем скетче
.