Курс «Современные микроконтроллеры: архитектура и программирование»
| Актуальность | Идёт набор |
|---|---|
| Стоимость | 29 000 руб |
| Продолжительность | 72 часа |
| Группа | от 3 до 6 человек |
| Начало занятий | По мере формирования группы |
В ходе курса изучается архитектура современных микроконтроллеров, используемых для построения микропроцессорных систем, основные этапы проектирования микропроцессорных систем, особенности разработки и отладки аппаратных и программных средств.
Также рассматриваются вопросы организации обмена данными между микроконтроллерами и объектами управления, использования интерфейсных средств связи с системами верхнего уровня.
Программа предназначена для специалистов в области управления техническими объектами.
Категория слушателей – ИТР и специалисты с высшим образованием.
Область профессиональной деятельности – проектирование систем управления и контроля; разработка, наладка и эксплуатация систем автоматического управления и технологического оборудования.
Для успешного прохождения курса необходимо знание математики, физики и электроники на уровне выпускника вуза и опыт работы с ПК. Желательно знание основ программирования.
Форма обучения – с отрывом от работы
Учебный план
| № п/п | Наименование разделов | Всего часов | В том числе | |||
|---|---|---|---|---|---|---|
| Лекции | Практические и лабораторные занятия | Самостоятельное изучение | Проверка знаний | |||
|
1 |
Введение |
2 |
1 |
|
1 |
|
|
2 |
Структура типовой микропроцессорной системы |
7 |
1 |
2 |
4 |
|
|
3 |
Архитектура современных микроконтроллеров Выполнение контрольного индивидуального задания (Темы 1, 2, 3) |
8 |
1 |
2 |
4 |
1 |
|
4 |
Организация памяти в микроконтроллерах |
7 |
1 |
2 |
4 |
|
|
5 |
Функциональные периферийные модули. Выполнение контрольного индивидуального задания (Темы 4, 5). |
10 |
3 |
2 |
4 |
1 |
|
6 |
Система команд микроконтроллера |
7 |
1 |
2 |
4 |
|
|
7 |
Средства разработки и отладки микропроцессорных устройств |
5 |
1 |
2 |
2 |
|
|
8 |
Архитектура микроконтроллеров семейства AVR |
4 |
1 |
1 |
2 |
|
|
9 |
Организация подсистемы памяти AVR. Выполнение контрольного индивидуального задания (Темы 8, 9). |
5 |
1 |
1 |
2 |
1 |
|
|
<pСистема прерываний AVR |
4 |
1 |
1 |
2 |
|
|
11 |
Периферийные модули AVR Выполнение контрольного индивидуального задания (Тема 11). |
8 |
2 |
3 |
2 |
1 |
|
12 |
Интерфейсные модули AVR |
5 |
2 |
2 |
1 |
|
|
|
Итого: |
72 |
16 |
|
32 |
4 |
|
13 |
Итоговая аттестация |
Итоговая оценка по результатам выполнения контрольных индивидуальных заданий |
||||

Контактная информация
Запись на курс
Современные микроконтроллеры.
 Архитектура, программирование… Магда, Ю. С.
Архитектура, программирование… Магда, Ю. С.В книге рассматривается широкий круг вопросов, связанных с применением популярных микроконтроллеров 8051 и их расширений в системах управления и контроля. Основной упор сделан на практические аспекты разработки цифровых и аналоговых интерфейсов, использования таймеров, визуализации результатов измерений в системах сбора информации.
Полная информация о книге
- Вид товара:Книги
- Рубрика:Микроэлектроника. Наноэлектроника
 изд.,практич.рук-во
изд.,практич.рук-во- ISBN:978-5-97060-551-6
- Серия:Несерийное издание
- Издательство: ДМК ПРЕСС
- Год издания:2017
- Количество страниц:223
- Тираж:100
- Формат:60х90/16
- УДК:621. 396.6
- Штрихкод:9785970605516
- Переплет:обл.
- Сведения об ответственности:Юрий Магда
- Код товара:3359623
 изд.,практич.рук-во
изд.,практич.рук-во 396.6
396.6Что такое микроконтроллер. Применение микроконтроллеров
В этой статье второго выпуска журнала Электрон, я хочу затронуть очень интересную тему, касающуюся цифровой электроники. Сегодня я хочу ответить на вопрос что такое микроконтроллер.
Итак, микроконтроллер это небольшая микросхема, на кристалле которой собран настоящий микрокомпьютер! Это означает, что внутри одной микросхемы смонтировали процессор, память (ПЗУ и ОЗУ), периферийные устройства, заставили их работать и взаимодействовать между собой и внешним миром с помощью специальной микропрограммы, которая храниться внутри микроконтроллера.
Основное назначение микроконтроллеров – это управление различными электронными устройствами. Таким образом, они применяются не только в персональных компьютерах, но и почти во всей бытовой технике, автомобилях, телевизорах, промышленных роботах, даже в военных радиолокаторах.
Можно сказать, что микроконтроллер это универсальный инструмент управления электронными устройствами, причем алгоритм управления вы закладываете в него сами и можете в любое время его поменять в зависимости от задачи, возложенной на микроконтроллер.
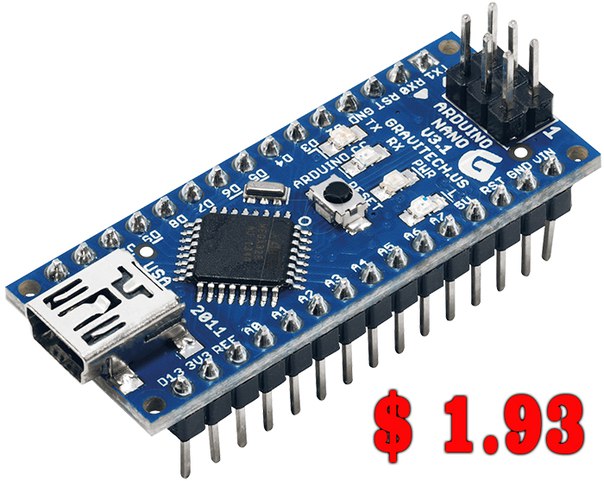
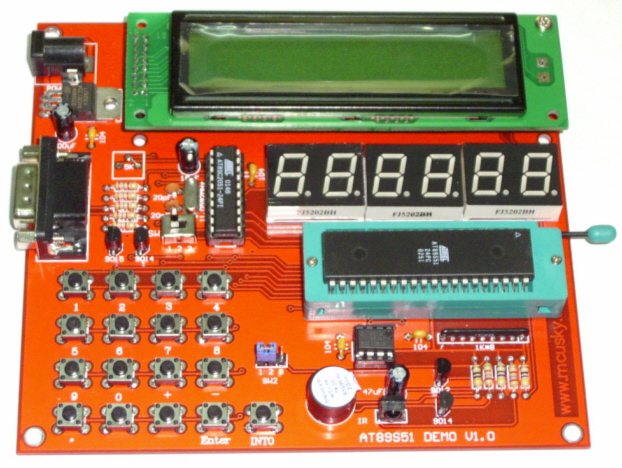
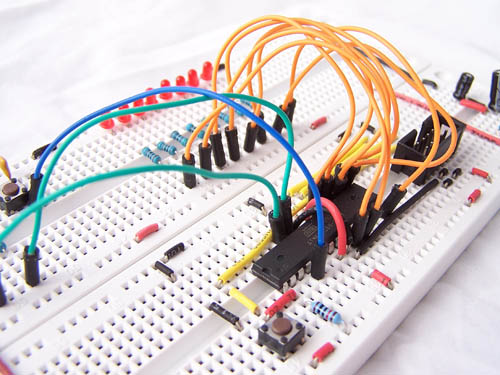
Так выглядят современные микроконтроллеры.
В настоящее время существует множество различных платформ и семейств микроконтроллеров, однако назначение, применение и суть их функционирования почти одинакова.
Мы сказали, что микроконтроллер это своего рода микрокомпьютер (старое название однокристальные микроЭВМ). Представим его в виде черного ящика. Внутри этого ящика расположены основные структурные элементы микроконтроллера.
Арифметико-логическое устройство (АЛУ) – предназначено для выполнения арифметических и логических операций, на самом деле в совокупности с регистрами общего назначения АЛУ выполняет функции процессора.
Оперативно – запоминающее устройство (ОЗУ) – предназначено для временного хранения данных при работе микроконтроллера.
Память программ — выполнена в виде перепрограммируемого постоянного запоминающего устройства и предназначена для записи микропрограммы управления микроконтроллером, так называемая прошивка.
Память данных применяется в некоторых микроконтроллерах в качестве памяти для хранения все возможных констант, табличных значений функций и т.д.
Микроконтроллер в своем составе может иметь и другие вспомогательные элементы.
Аналоговый компаратор – предназначен для сравнения двух аналоговых сигналов на его входах
Таймеры в микроконтроллерах применяются для осуществления различных задержек и установки различных интервалов времени в работе микроконтроллера.
Аналогово-цифровой преобразователь (АЦП) необходим для ввода аналогового сигнала в микроконтроллер и его функция перевести аналоговый сигнал в цифровой.
Цифро-аналоговый преобразователь (ЦАП) выполняет обратную функция, то есть сигнал из цифрового вида преобразует в аналоговый вид.
Работа микроконтроллера синхронизируется тактовыми импульсами с генератора и управляется устройством управления микроконтроллера.
Таким образом, микроконтроллер это электронный конструктор, с помощью которого вы можете собрать свое устройство управления. Путем программирования микроконтроллера вы отключаете или подключаете составные устройства внутри микроконтроллера, задаете свои алгоритмы работы этих устройств.
Предлагаю вам посмотреть видео, в котором я рассказываю, что такое микроконтроллер и привожу пару примеров практического применения микроконтроллеров.
Кстати тем, кто заинтересовался темой и хочет создать самостоятельно устройство на основе микроконтроллеров фирмы Atmel, предлагаю посмотреть следующее видео.
Видео посвящено видеокурсу о программировании микроконтроллеров фирмы Atmel , пройдя который вы не только познакомитесь с замечательным миром микроконтроллеров, но и научитесь программировать микроконтроллеры, а следовательно самостоятельно создавать электронные устройства на микроконтроллерах.
Видеокурс «Программирование микроконтроллеров для начинающих» более 70 часов качественного видео.
В результате изучения вы получите те знания с помощью которых сможете самостоятельно разработать устройство любой сложности.
Микроконтроллеры
Что такое микроконтроллер? Это такая микросхема, которая имеет несколько
входов/выходов. Главное преимущество микроконтроллера — это возможность программирования.
За счёт этого один и тот же микроконтроллер может использоваться для совершенно различных целей.
Вы можете как угодно обрабатывать сигналы на входах и в зависимости от этого устанавливать сигналы на выходах.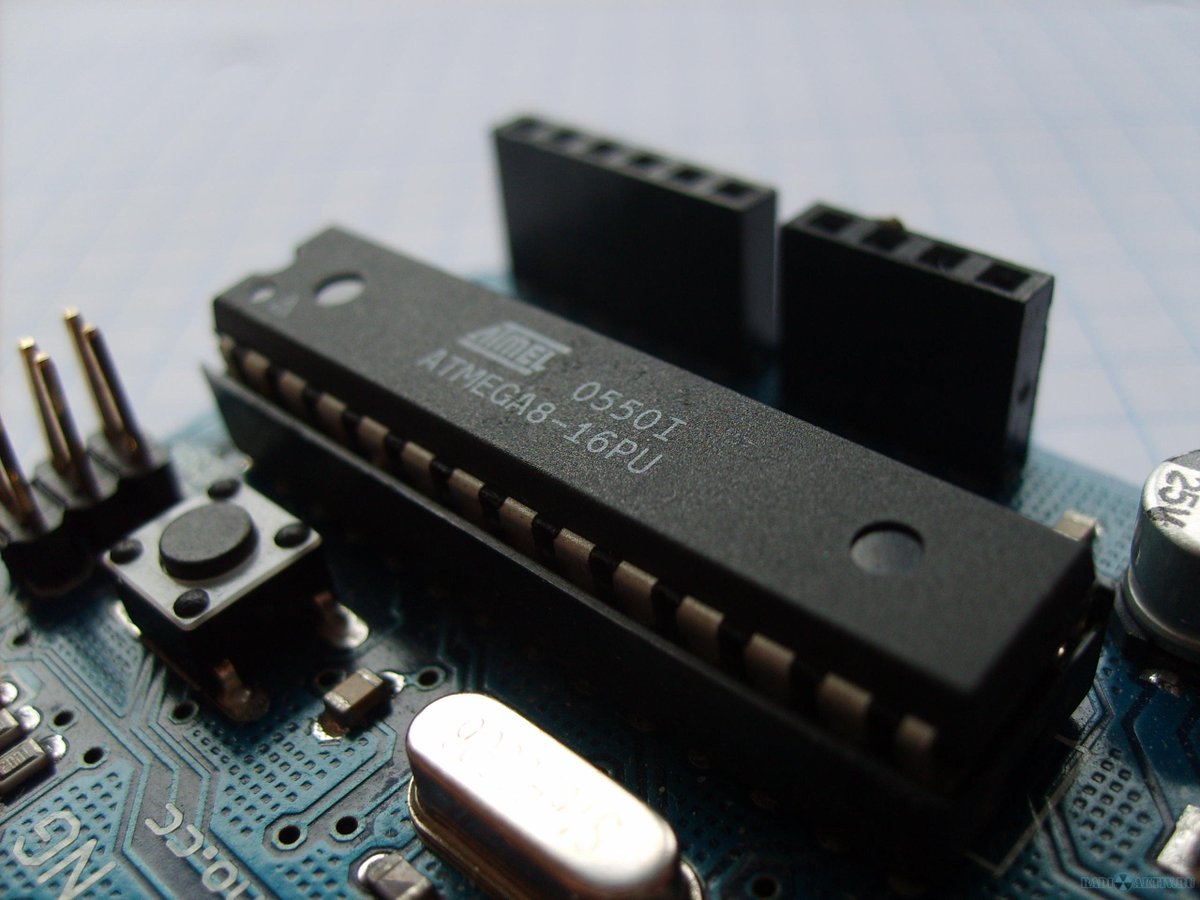 Более того, многие современные микроконтроллеры позволяют программным путём превратить входы в выходы и наоборот!
Более того, многие современные микроконтроллеры позволяют программным путём превратить входы в выходы и наоборот!
За счёт такой универсальности схемы на микроконтроллерах позволяют реализовать практически любое устройство — от простого таймера до телевизора или стиральной машины. Хотя, конечно, телевизорами и стиральными машинами применение микроконтроллеров не ограничивается.
В этом разделе вы найдёте книги, статьи и документацию по теме программирование микроконтроллеров (а также другую полезную информацию). Я постарался представить всю информацию в стиле микроконтроллеры для чайников (или, если слово «чайник» вам кажется обидным, пусть будет микроконтроллеры для начинающих). Этот раздел сайта будет постоянно пополняться новыми материалами (по мере наличия свободного времени))).
Микроконтроллеры для чайников
Бесплатная рассылка о микроконтроллерах. Даже если вы вообще ничего не знаете о микроконтроллерах,
подписавшись на эту рассылку вы сможете получить все необходимые знания для
изучения этой интереснейшей темы.
Даже если вы вообще ничего не знаете о микроконтроллерах,
подписавшись на эту рассылку вы сможете получить все необходимые знания для
изучения этой интереснейшей темы.
Микроконтроллеры для начинающих
Серия статей для начинающих об устройстве микроконтроллеров на примере простого, но реального микроконтроллера.
Устройства на микроконтроллерах
Любое устройство на микроконтроллере — это сначала электроника, и только потом — программирование. Поэтому рано-или поздно, раз уж я начал писать о микроконтроллерах, я должен был создать раздел, в котором будут схемы, чертежи, примеры и прочая инженерия, имеющая отношение к микроконтроллерам…
Как стать программистом
Эта бесплатная книга не является пособием по программированию микроконтроллеров. Но в ней есть раздел,
посвящённый микроконтроллерам серии PIC. Для начинающих это может оказаться полезным, так как
позволит не только лучше понять, для чего нужны микроконтроллеры, но и шаг за шагом разработать
простое устройство на микроконтроллере, изучить основы программирования, написать и отладить программу. ..
..
Микроконтроллеры AVR: общие сведения
Краткое описание микроконтроллеров серии AVR. Рассмотрены основные команды и основы программирования.
Кроме того здесь вы можете скачать контрольную работу с примером использования микроконтроллеров
(вместе с исходными кодами и прошивкой).
Микроконтроллеры PIC
Серия статей и видеоуроков об одних из самых популярных микроконтроллеров серии PIC.
Микроконтроллеры для чайников
Бесплатная рассылка о микроконтроллерах для начинающих. Разделы:
Новые 32-битные микроконтроллеры для IoT и промышленности 4.0
Не так давно 32-битный микроконтроллер был экзотическим устройством. Сегодня ими уже никого не удивить и они, как правило, доступны по цене. 32-разрядные микроконтроллеры последнего поколения были существенно улучшены и поставляются несколькими конкурентными поставщиками.
Некоторые производители полупроводниковых приборов даже создали эти устройства для отдельных областей применения. Это именно то, что Renesas сделал со своей новой линейкой микроконтроллеров.
Это именно то, что Renesas сделал со своей новой линейкой микроконтроллеров.
Микроконтроллеры Renesas RA
Встроенные микроконтроллеры Renesas RA основаны на процессорных ядрах Arm Cortex-M, включая Arm Cortex-M4 и -M23. Существует несколько версий с широким диапазоном флэш-памяти (от 256 кБ до 2 МБ) и выбором SRAM. Варианты комплектации варьируются от маленького 32-контактного устройства до большой 176-контактной версии. Интерфейсы включают USB, CAN и Ethernet, а также большинство других популярных портов последовательного ввода-вывода. Другими важными особенностями являются механизм Secure Crypto, 24-разрядный аналого-цифровой преобразователь (АЦП), технология емкостного касания с человек-машинным интерфейсом (HMI) от Renesas и контроллеры для TFT LCD.
Микроконтроллеры RA достаточно гибкие, чтобы охватить широкий спектр применений. Охватывается практически любая архитектура индустрии 4.0 или сценарий автоматизации производства. Приложения для домашнего использования ориентированы на бытовую технику, здравоохранение и учет. Если требуется беспроводное соединение, модель доступна для решения и этой проблемы.
Если требуется беспроводное соединение, модель доступна для решения и этой проблемы.
Опция беспроводной связи
Специальной версией семейства RA является RA4W1, который интегрирует Bluetooth 5.0 Low Energy (рисунок ниже). Плата, в которой реализовано ядро Arm Cortex-M4, оптимизирована для низкого энергопотребления: прием 3,3 мА и передача 4,5 мА. Благодаря возможности ячеистой сети Bluetooth (BT) можно создавать беспроводные сенсорные сети.
Радиостанции BT могут достигать скорости передачи данных 2 Мбит / с, но лучшая чувствительность приема составляет –105 дБм при 125 кбит / с, что значительно расширяет диапазон. Микроконтроллер включает в себя стек протоколов Bluetooth (BT) и несколько функций API, которые поддерживают стандартные профили, такие как профиль сердечного ритма (Heart Rate Profile), профиль зондирования среды (Environment Sensing Profile) и профиль ввода / вывода (Automation I/O Profile). Эти профили значительно сокращают время разработки и затраты на нее.
Дальнейшее снижение себестоимости BOM достигается за счет интеграции некоторых схем, обычно реализуемых вне микросхемы контроллера. Примерами являются генератор на кристалле и схема регулировки плюс LC цепь для согласования антенны.
Эта версия микроконтроллеров RA работает на частоте 48 МГц и имеет 512 кБ флэш-памяти и 96 кБ SRAM. Интерфейсы включают технологию емкостного касания USB, CAN и HMI компании Renesas. Важной особенностью является Renesas Secure Crypto Engine для обеспечения надежной защиты приложений IoT. Пакет представляет собой 56-контактный QFN размером 7 x 7 мм.
Имейте в виду, что Renesas также предлагает широкий набор оценочных комплектов для всех микроконтроллеров RA. Это позволит быстро запустить ваш следующий встроенный проект (embedded). Платы разработки предоставляют возможность последовательного ввода-вывода для отладки и доступа к системам ввода-вывода микроконтроллера.
Программное обеспечение, которое делает аппаратное обеспечение неотразимым
То, что делает эту линейку 32-битных микроконтроллеров столь привлекательной, — это программное обеспечение для разработки, которое ее поддерживает. Пакет разработки, получивший название «Гибкий пакет программного обеспечения» (FSP), представляет собой расширенную версию оригинального дизайна, включающую базовое программное обеспечение для разработки Arm. Обычные средства разработки включают в себя IDE, компиляторы, библиотеки и отладчики. Также в «миксе» есть экосистема сторонних решений от Arm. FSP поставляется с FreeRTOS, который может быть заменен другой ОСРВ или некоторым промежуточным программным обеспечением, как того требует приложение.
Пакет разработки, получивший название «Гибкий пакет программного обеспечения» (FSP), представляет собой расширенную версию оригинального дизайна, включающую базовое программное обеспечение для разработки Arm. Обычные средства разработки включают в себя IDE, компиляторы, библиотеки и отладчики. Также в «миксе» есть экосистема сторонних решений от Arm. FSP поставляется с FreeRTOS, который может быть заменен другой ОСРВ или некоторым промежуточным программным обеспечением, как того требует приложение.
Ключевыми моментами FSP являются улучшения на базе искусственного интеллекта. Они позволяют создавать решения, включающие современные нейронные сети, машинное обучение и возможности управления электродвигателем. Все больше и больше разработчиков используют решения искусственного интеллекта и должны иметь микроконтроллер, поддерживающий необходимое программное обеспечение.
Как упоминалось ранее, механизм криптографии на кристалле поддерживается FSP и добавляет усовершенствования для защиты соединений микросхема-облако со всеми основными поставщиками облачных услуг. Другие функции включают в себя генерацию безопасного ключа, хранение зашифрованных ключей и поддержку аппаратного ускорения AES, SHA-2, RSA 2K, криптографического алгоритма NIST с эллиптической кривой и защищенных соединений MQTT по TLS.
Другие функции включают в себя генерацию безопасного ключа, хранение зашифрованных ключей и поддержку аппаратного ускорения AES, SHA-2, RSA 2K, криптографического алгоритма NIST с эллиптической кривой и защищенных соединений MQTT по TLS.
Приложения на базе искусственного интеллекта улучшают микроконтроллеры
Все чаще разработчики используют подходы искусственного интеллекта. И в некоторых случаях использование решения ИИ является единственным возможным или практическим решением. Renesas решает эту проблему с помощью новой серии микроконтроллеров RZ / V. Первоначальный продукт, получивший название RZ / V2M, состоит из двух ядер Arm Cortex-A53, работающих на частоте 1 ГГц. Названный динамически реконфигурируемым процессором (DRP), он оптимизирован для ускорения AI. Это устройство предназначено для обеспечения возможности логического вывода ИИ в режиме реального времени при достижении превосходной энергоэффективности.
Интересной особенностью является процессор обработки изображений (ISP), который может обрабатывать видео высокой четкости 4K со скоростью 30 кадров в секунду (кадр / с). Одним из целевых приложений является обнаружение и распознавание лиц. Устройство также содержит кодер / декодер H.265 / H.264. Обеспечивается поддержка сенсорных интерфейсов CMOS и двух одновременно работающих камер. RZ / V2M также включает поддержку интерфейсов USB3.1, PCI-E и Gigabit Ethernet, а также интерфейсов отображения MIPI-DSI и HDMI. Потребляемая мощность около 4 Вт.
Одним из целевых приложений является обнаружение и распознавание лиц. Устройство также содержит кодер / декодер H.265 / H.264. Обеспечивается поддержка сенсорных интерфейсов CMOS и двух одновременно работающих камер. RZ / V2M также включает поддержку интерфейсов USB3.1, PCI-E и Gigabit Ethernet, а также интерфейсов отображения MIPI-DSI и HDMI. Потребляемая мощность около 4 Вт.
Подводя итоги
32-разрядные микроконтроллеры Renesas — это эклектичные современные процессоры, оптимизированные для современных нужд. Если вы все больше ориентируетесь на решения ИИ, эти устройства, безусловно, стоит рассмотреть. Для промышленности 4.0 данные устройства могут открыть довольно большие возможности.
Микропроцессоры и микроконтроллеры Microchip, Silicon Labs
В электронном оборудовании микроконтроллеры и микропроцессоры являются центральным узлом, управляющим работой всего устройства. Современные микроконтроллеры и микропроцессоры значительно расширили свои возможности и зачастую могут полностью реализовать функционал конечного устройства без применения дополнительных электронных компонентов. Большинство задач реализуется на широко распространенных 8-разрядных и 32-разрядных микроконтроллерах, которые являются наиболее популярными во всем мире.
Большинство задач реализуется на широко распространенных 8-разрядных и 32-разрядных микроконтроллерах, которые являются наиболее популярными во всем мире.
В процессе отладки встраиваемых приложений разработчикам неизбежно приходится использовать различные программные и аппаратные средства — компиляторы, операционные системы, JTAG-адаптеры, оценочные платы. Производители микроконтроллеров обычно предлагают свои разнообразные аппаратные средства разработки под каждую серию микросхем. Разработку программы можно осуществлять в бесплатных средах разработки от производителя микроконтроллера, но наиболее эффективная работа получается при использовании профессиональных средств разработки, потому что постоянное повышение скорости передачи и обработки информации вынуждает использовать средства разработки, отвечающие самым высоким требованиям по производительности и функциональным возможностям.
Компания ЭФО предлагает широкий спектр микроконтроллеров и микропроцессоров для встраиваемых применений от известных мировых производителей — Microchip, Silicon Labs и Nuvoton, а также профессиональные программные среды разработки компаний IAR Systems и Embedded Wizard.
Производители
Новости
Статьи
Каталоги, брошюры, CD-диски
Контакты
|
Microchip |
Мялкин Никита |
nsm@efo. |
|
Silicon Labs |
Курилин Алексей |
|
|
IAR Systems |
Мамаева Татьяна |
 ru
ruСовременные программные средства связи микроконтроллера с компьютером по интерфейсу RS-232. Часть 2 — Компоненты и технологии
Все статьи цикла:
2. Использование нового алгоритма обмена информацией по RS-232 между компьютером и микроконтроллером
2.1. Суть нового алгоритма обмена
Новый алгоритм обмена по интерфейсу RS-232, разработанный автором и опубликованный в работах [2] и [3], заключается в аппаратной синхронизации каждого передаваемого/принимаемого байта линиями данных (TxD и RxD) этого же интерфейса. В этом его существенное отличие от стандартной аппаратной синхронизации линиями квитирования (DTR-DSR или RTS-CTS). Кроме того, от существующей программной синхронизации линиями данных (TxD и RxD), которую принято называть Xon-Xoff, новый алгоритм отличается именно «аппаратностью», то есть синхронизация осуществляется не посылкой информационного байта (например, Xoff) по линиям данных, а изменением их состояния, как это устроено в аппаратной синхронизации линиями квитирования.
В этом его существенное отличие от стандартной аппаратной синхронизации линиями квитирования (DTR-DSR или RTS-CTS). Кроме того, от существующей программной синхронизации линиями данных (TxD и RxD), которую принято называть Xon-Xoff, новый алгоритм отличается именно «аппаратностью», то есть синхронизация осуществляется не посылкой информационного байта (например, Xoff) по линиям данных, а изменением их состояния, как это устроено в аппаратной синхронизации линиями квитирования.
Такая аппаратная синхронизация с одной стороны экономит линии, по которым осуществляется обмен данными, а с другой — позволяет использовать выходные линии квитирования компьютера (DTR и RTS) для управления режимами работы микроконтроллера (штатный режим/режим внутрисистемного (ISP) программирования). При этом линия DTR управляет сбросом (вывод RESET микроконтроллера), а линия RTS — переводом его из штатного режима работы в режим программирования. В большинстве случаев (для микроконтроллеров семейств MSC12XX, ADUC8XX, AT89C51ED2/RD2) линия RTS управляет сигналом, подаваемым на вывод PSEN.
Суть аппаратной синхронизации линиями данных заключается в следующем. Предположим, что передается некоторый поток данных от компьютера к микроконтроллеру (например, пакет размером 1000 байт). В обмене в этом случае участвует только одна линия интерфейса. Этo линия ТxD компьютера, которая соединена с линией RxD микроконтроллера. Вторая линия — линия TxD микроконтроллера, соединенная с линией RxD компьютера, в это время не используется (простаивает). В связи со сказанным, основная идея нового алгоритма заключается как раз в том, что «простаивающую» линию можно использовать для аппаратной синхронизации обмена байтами между компьютером и микроконтроллером. Что означает фраза «аппаратная синхронизация»? Она означает, что синхронизация осуществляется не посылкой информационного байта по простаивающей линии (например, Xoff, как это организовано в программной синхронизации), а изменением состояния линии TxD микроконтроллера с «логической 1» на «логический 0» и обратно, как это происходит при аппаратной синхронизации какой-либо линией квитирования (например, линией DTR).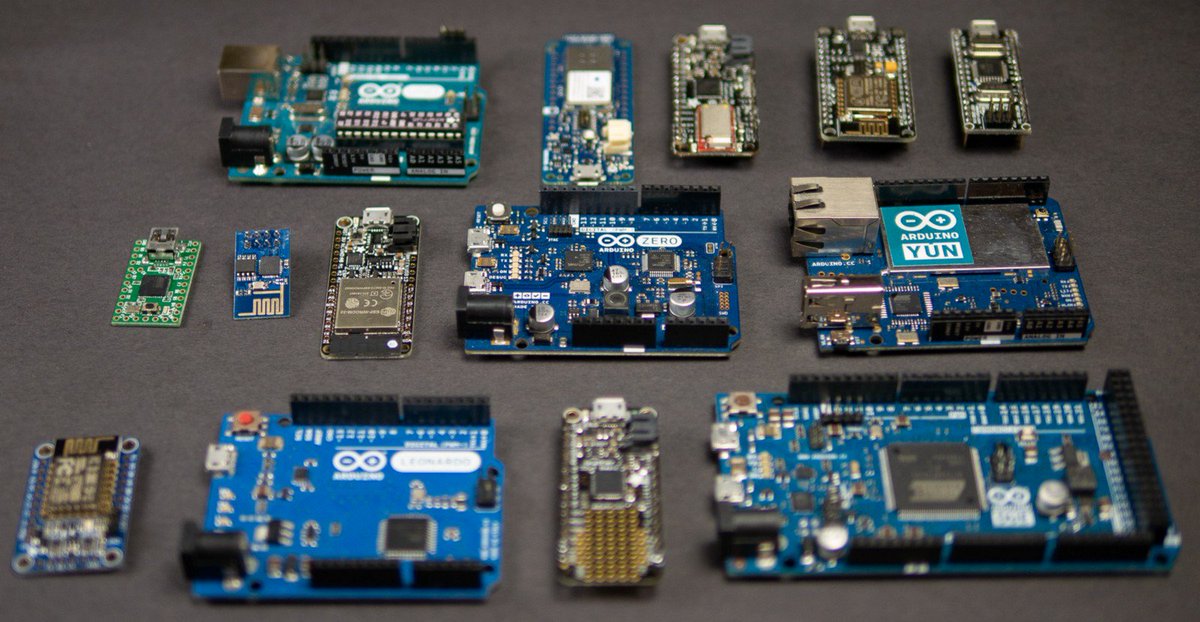
В начале передачи каждого байта компьютер запрашивает у микроконтроллера разрешение на передачу. Для этого он анализирует свою линию данных RxD. Если линия находится в состоянии запрета на передачу (например, на ней установлена «логическая 1»), компьютер не передает байт, а продолжает опрашивать эту линию, пока не получит разрешения (например, пока уровень на линии не будет соответствовать «логическому 0»). Получив разрешение, компьютер передает только один байт, ожидает конца передачи этого байта (то есть ждет, пока не выведется последний бит передаваемого байта) и опять переходит в режим опроса линии для получения разрешения на передачу следующего байта.
Микроконтроллер, принимающий поток байт, выполняет следующие действия. Во-первых, именно он является инициатором начала обмена, поскольку именно он первым дает разрешение компьютеру на передачу очередного (первого) байта. Вспомним, что в начале передачи компьютер ждет разрешения на передачу, то есть находится в режиме ожидания.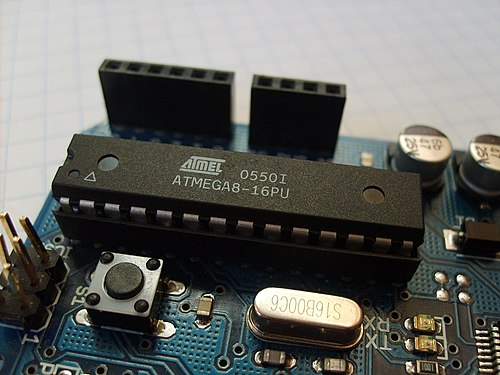 Переключив свою линию TxD из запрещающего состояния в разрешающее (то есть дав компьютеру разрешение на передачу байта), микроконтроллер ожидает передачи байта от компьютера. В чем суть ожидания передачи байта от компьютера? В том, что в начале поступления байта в микроконтроллер его линия RxD изменяет свое состояние, поскольку передача байта начинается со старт-бита. Поэтому линия RxD микроконтроллера и изменяет свое состояние с «логической 1» на «логический 0». В этот момент с одной стороны старт-бит инициирует UART микроконтроллера на прием байта (и этот прием уже происходит без участия процессора микроконтроллера), с другой, микроконтроллер, определив, что передача началась, должен сбросить разрешение (то есть установить запрещающий потенциал на своей линии TxD).
Переключив свою линию TxD из запрещающего состояния в разрешающее (то есть дав компьютеру разрешение на передачу байта), микроконтроллер ожидает передачи байта от компьютера. В чем суть ожидания передачи байта от компьютера? В том, что в начале поступления байта в микроконтроллер его линия RxD изменяет свое состояние, поскольку передача байта начинается со старт-бита. Поэтому линия RxD микроконтроллера и изменяет свое состояние с «логической 1» на «логический 0». В этот момент с одной стороны старт-бит инициирует UART микроконтроллера на прием байта (и этот прием уже происходит без участия процессора микроконтроллера), с другой, микроконтроллер, определив, что передача началась, должен сбросить разрешение (то есть установить запрещающий потенциал на своей линии TxD).
Момент времени сброса разрешения компьютеру на передачу следующего байта очень важен. Другими словами, требуется определить, когда именно микроконтроллер должен сбросить это разрешение (то есть установить запрет на передачу). С одной стороны, ответ на этот вопрос напрашивается сам собой: именно тогда, когда микроконтроллер определит начало поступления байта (то есть в момент времени начала старт-бита). Но здесь кроется одна «ловушка». Дело в том, что многие современные микроконтроллеры имеют быстродействие намного выше, чем предыдущие поколения. Многие производители предлагают микроконтроллеры с такой архитектурой, в которой большинство команд выполняются не за 12 тактов, как это было ранее. Многие из них выполняют команду процессора всего за один такт (например, микроконтроллеры ADUC8XX, C8051FXXX), некоторые — за два такта (например, P89LPC9XX), некоторые — за 4 такта (MSC12XX), другиеза 6 тактов (например, AT89C51ED2/RD2). Кроме того, быстродействие современных компьютеров также растет весьма быстро. Поэтому сбрасывать разрешение сразу после начала старт-бита нельзя, поскольку время от начала разрешения передачи и началом старт-бита последующего за этим разрешением передачи байта может составлять от нескольких микросекунд до долей микросекунд (в зависимости от скорости микроконтроллера).
С одной стороны, ответ на этот вопрос напрашивается сам собой: именно тогда, когда микроконтроллер определит начало поступления байта (то есть в момент времени начала старт-бита). Но здесь кроется одна «ловушка». Дело в том, что многие современные микроконтроллеры имеют быстродействие намного выше, чем предыдущие поколения. Многие производители предлагают микроконтроллеры с такой архитектурой, в которой большинство команд выполняются не за 12 тактов, как это было ранее. Многие из них выполняют команду процессора всего за один такт (например, микроконтроллеры ADUC8XX, C8051FXXX), некоторые — за два такта (например, P89LPC9XX), некоторые — за 4 такта (MSC12XX), другиеза 6 тактов (например, AT89C51ED2/RD2). Кроме того, быстродействие современных компьютеров также растет весьма быстро. Поэтому сбрасывать разрешение сразу после начала старт-бита нельзя, поскольку время от начала разрешения передачи и началом старт-бита последующего за этим разрешением передачи байта может составлять от нескольких микросекунд до долей микросекунд (в зависимости от скорости микроконтроллера). Такой короткий импульс разрешения просто не пройдет через преобразователи уровней интерфейса RS-232 (например, ADM3202, MAX1406, ADM231). В результате обмен может сорваться.
Такой короткий импульс разрешения просто не пройдет через преобразователи уровней интерфейса RS-232 (например, ADM3202, MAX1406, ADM231). В результате обмен может сорваться.
С другой стороны, ждать, пока байт полностью не поступит в микроконтроллер, и уже после этого сбрасывать разрешение тоже нельзя, поскольку компьютер после окончательного вывода байта сразу же приступает к анализу линии, по которой передается разрешение на передачу следующего байта. Поскольку микроконтроллер все-таки более медленное устройство, чем компьютер, он может не успеть среагировать и сбросить это разрешение немного позже момента начала анализа компьютером линии разрешения. В результате, проанализировав линию разрешения и определив, что она находится в состоянии разрешения передачи, компьютер передаст следующий байт, который микроконтроллер пропустит, что приведет к срыву обмена данными.
В связи со сказанным, с точки зрения автора, идеальным моментом времени сброса разрешения является момент времени, соответствующий передаче половины байта (то есть середина байта). В этом случае потенциалы разрешения и запрета будут чередоваться, и форма сигнала на линии разрешения (на линии TxD микроконтроллера) будет представлять собой что-то похожее на прямоугольный меандр. Причем длительность импульса такого меандра будет приблизительно равна половине длительности передачи одного байта. Такой длинный импульс, с одной стороны, свободно пройдет через преобразователь уровней интерфейса. С другой стороны, сброс разрешения в середине передаваемого байта никак не повлияет на передачу следующего байта компьютером, поскольку в это время он анализирует не линию разрешения, а бит, ответственный за конец вывода последнего бита передаваемого байта. И этим анализом компьютер будет заниматься до окончания вывода байта, прежде чем приступить к анализу линии разрешения. А линия разрешения к этому моменту будет уже давно сброшена, что и требуется.
В этом случае потенциалы разрешения и запрета будут чередоваться, и форма сигнала на линии разрешения (на линии TxD микроконтроллера) будет представлять собой что-то похожее на прямоугольный меандр. Причем длительность импульса такого меандра будет приблизительно равна половине длительности передачи одного байта. Такой длинный импульс, с одной стороны, свободно пройдет через преобразователь уровней интерфейса. С другой стороны, сброс разрешения в середине передаваемого байта никак не повлияет на передачу следующего байта компьютером, поскольку в это время он анализирует не линию разрешения, а бит, ответственный за конец вывода последнего бита передаваемого байта. И этим анализом компьютер будет заниматься до окончания вывода байта, прежде чем приступить к анализу линии разрешения. А линия разрешения к этому моменту будет уже давно сброшена, что и требуется.
Подсчитаем длительность времени от момента старт-бита до середины байта при скорости 115 200 бод. Очевидно, что при частоте 115 200 Гц длительность передачи одного бита будет равна: 1/115 200 = 0,00000868 с или около 8,7 мкс.
Передача всех 10 бит (1 старт-бит + 8 бит данных + 1 стоп-бит) будет занимать около 87 мкс. Половина этого времени составляет около 43 мкс. Если сделать некоторый запас по реакции микроконтроллера (5–15 мкс), то после обнаружения старт-бита необходимо сделать задержку в 25–30 мкс и затем сбросить разрешение. О том, как осуществить столь короткую и машинно-независимую задержку в компьютере, уже обсуждалось ранее. В микроконтроллере организовать подобную временную задержку достаточно просто, поскольку программисту всегда известна частота тактового генератора микроконтроллера.
На рис. 1 показана временная диаграмма передачи байта, составленная на основе приведенных выше рассуждений.
Рис. 1. Временная диаграмма аппаратной синхронизации передачи байта
Подведем итоги (рис. 1). Итак, передатчик ожидает разрешения на передачу байта. На временной диаграмме это время от 0 до получения такого разрешения (до перехода RxD с высокого уровня в низкий). Далее приемник посылает разрешение на передачу байта по линии RxD передатчика, устанавливая ее в нулевой уровень.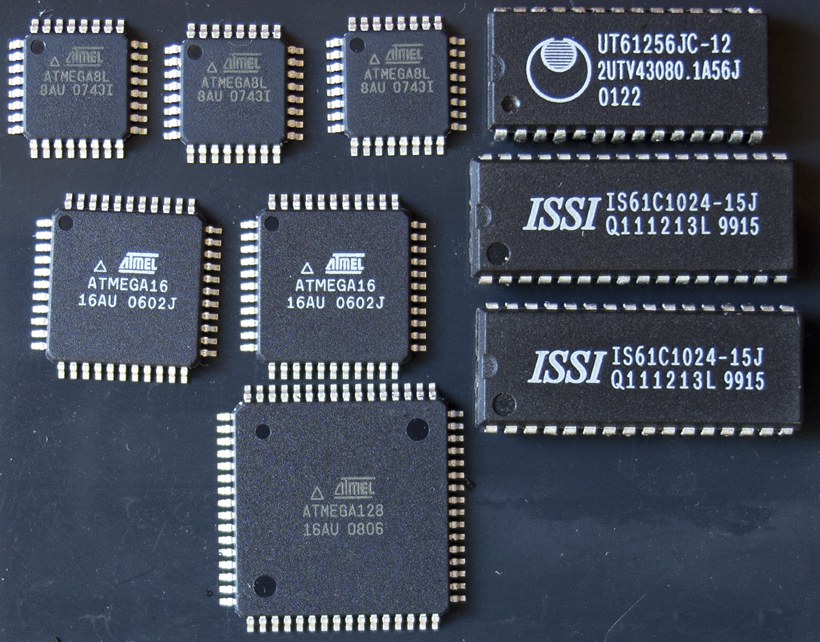 На верхнем графике этот факт отражен тем, что уровень RxD переключается с единичного в нулевое состояние. Получив разрешение на передачу байта, передатчик начинает передавать байт, но не мгновенно, а спустя некоторое время реакции на это разрешение; это время реакции на разрешение передачи обозначено Tpp. Далее приемник ждет начало старт-бита, то есть переключения линии TxD приемника с уровня «логической 1» на «логический 0». После определения факта начала передачи по старт-биту, приемник спустя некоторое время реакции, обозначенное Трн (время реакции на начало передачи), запускает задержку длительностью около 25 мкс.
На верхнем графике этот факт отражен тем, что уровень RxD переключается с единичного в нулевое состояние. Получив разрешение на передачу байта, передатчик начинает передавать байт, но не мгновенно, а спустя некоторое время реакции на это разрешение; это время реакции на разрешение передачи обозначено Tpp. Далее приемник ждет начало старт-бита, то есть переключения линии TxD приемника с уровня «логической 1» на «логический 0». После определения факта начала передачи по старт-биту, приемник спустя некоторое время реакции, обозначенное Трн (время реакции на начало передачи), запускает задержку длительностью около 25 мкс.
По прошествии времени задержки (на диаграмме оно обозначено Тз) приемник сбрасывает разрешение, то есть переключает линию RxD передатчика из низкого состояния в высокое. Далее, после окончания передачи байта, передатчик переходит к анализу разрешения передачи следующего байта (состояния линии RxD). В этот момент она достаточно давно находится в единичном состоянии, и передатчик продолжает ожидать разрешение на передачу. Приемник, приняв байт полностью до последнего стоп-бита и записав, например, его в память, спустя некоторое время (назовем его временем реакции на конец приема Трк), когда он полностью готов принять следующий байт, опять выставляет разрешение на передачу (уже следующего) байта. На временной диаграмме этот факт отражен переключением линии RxD с состояния «логической 1» в состояние «логического 0». Далее процесс повторяется.
Приемник, приняв байт полностью до последнего стоп-бита и записав, например, его в память, спустя некоторое время (назовем его временем реакции на конец приема Трк), когда он полностью готов принять следующий байт, опять выставляет разрешение на передачу (уже следующего) байта. На временной диаграмме этот факт отражен переключением линии RxD с состояния «логической 1» в состояние «логического 0». Далее процесс повторяется.
Необходимо отметить, что достоверность обмена может быть значительно повышена, если передатчик сделает дополнительный анализ линии RxD на сброс разрешения. Как видно из временной диаграммы, сброс разрешения (установка приемником линии RxD передатчика в высокий уровень) происходит по времени где-то в середине передачи байта. Если передатчик проверит линию RxD на предмет сброса разрешения (переключение ее в высокий уровень), то этот факт для передатчика будет означать, что приемник начал принимать передаваемый передатчиком байт и в связи именно с этим сбросил разрешение. Другими словами, дополнительная проверка сброса разрешения позволяет передатчику определить, что приемник работает ожидаемым образом и переключает линию RxD передатчика с высокого уровня в низкий и обратно.
Другими словами, дополнительная проверка сброса разрешения позволяет передатчику определить, что приемник работает ожидаемым образом и переключает линию RxD передатчика с высокого уровня в низкий и обратно.
Без такой проверки можно оказаться в следующей ситуации. Предположим, что приемник вообще не работает, и каким-либо образом линия RxD передатчика находится в разрешающем состоянии. В этом случае передатчик будет передавать байт за байтом в «пустоту», поскольку он проверяет линию RxD только на предмет разрешения. Проверив же линию RxD дополнительно на предмет запрета и определив, что приемник такого запрета не выдает, передатчик может сделать вывод, что приемник не работает, что линия RxD не переключается из высокого состояния в низкое и обратно. В связи с этим передатчик может прекратить передачу (и выдать, например, сообщение об ошибке или каким-либо иным способом просигнализировать о сбое обмена).
И еще одно существенное замечание. Во время передачи байта, то есть с начала старт-бита и до конца последнего стоп-бита ни процессор передатчика, ни процессор приемника не принимают никакого участия в обмене, поскольку и в компьютере, и в микроконтроллере этим занимается UART, то есть аппаратные средства. Поэтому все проверки состояния линий, переключения их из одного состояния в другое, организация задержек (например, в 25 мкс) и т. п. не оказывают никакого влияния на скорость передачи. Например, задержка в 25 микросекунд и проверка передатчиком сброса разрешения проводятся во время передачи и приема байта, и никоем образом не «тормозят» обмен. Как будет видно из дальнейшего изложения, реальная скорость обмена при использовании излагаемого алгоритма отличается от идеальной не более, чем на 1–2% и больше зависит от используемой операционной системы и «метода», примененного для обращения к портам ввода/вывода (в частности, к порту RS232). Такое сравнение сделано автором, и его результат будет представлен читателю несколько позднее.
Поэтому все проверки состояния линий, переключения их из одного состояния в другое, организация задержек (например, в 25 мкс) и т. п. не оказывают никакого влияния на скорость передачи. Например, задержка в 25 микросекунд и проверка передатчиком сброса разрешения проводятся во время передачи и приема байта, и никоем образом не «тормозят» обмен. Как будет видно из дальнейшего изложения, реальная скорость обмена при использовании излагаемого алгоритма отличается от идеальной не более, чем на 1–2% и больше зависит от используемой операционной системы и «метода», примененного для обращения к портам ввода/вывода (в частности, к порту RS232). Такое сравнение сделано автором, и его результат будет представлен читателю несколько позднее.
Вернемся к временной диаграмме. Если посмотреть еще раз на временную диаграмму (рис. 1), то можно заметить, что график зависимости напряжения от времени на линии RxD представляет собой почти симметричный прямоугольный меандр. Длительность импульса такого меандра составляет половину времени на передачу одного байта. Такой импульс легко воспринимается преобразователем интерфейса (об этом уже было упомянуто выше).
Такой импульс легко воспринимается преобразователем интерфейса (об этом уже было упомянуто выше).
Теперь несколько слов о том, каким образом компьютер может анализировать линию разрешения. Дело в том, что в интерфейсе RS232 компьютера непосредственное чтение и анализ состояния самой линии RxD (то есть «логическая 1» или «логический 0») невозможен. Но, например, соединив эту линию RxD с какой-либо входной линией квитирования (например, DSR), состояние которой поддается чтению, можно добиться требуемого: прочитав в определенное время состояние линии DSR, можно узнать и состояние линии RxD. Tо есть в то время, когда линия RxD используется как линия разрешения, чтение линии DSR покажет ее состояние. Когда же линия RxD используется как линия данных (при передаче информации из микроконтроллера в компьютер), состояние линии DSR просто не нужно читать и анализировать, так как в таком режиме ее состояние не представляет никакого интереса.
В обратную сторону (при передаче информации от микроконтроллера в компьютер) обмен информацией идет подобным же образом, и логика работы аппаратной синхронизации остается прежней. Есть, правда, некоторые нюансы, на которых мы остановимся несколько позднее.
Есть, правда, некоторые нюансы, на которых мы остановимся несколько позднее.
Резюмируя все вышесказанное, приведем блок-схему сопряжения компьютера и микроконтроллера для целей штатного режима работы при условии аппаратной синхронизации обмена линиями данных. Блок-схема такого сопряжения приведена на рис. 2.
Рис. 2. Логическая блок-схема сопряжения компьютера с микроконтроллером для целей штатного режима работы при аппаратной синхронизации линиями данных с одним передатчиком
Рис. 3. Логическая блок-схема сопряжения компьютера с микроконтроллером для целей штатного режима работы при аппаратной синхронизации линиями данных с двумя передатчиками
Как можно увидеть из приведенной схемы, линия RxD соединена с линией DSR непосредственно в разъеме RS232 компьютера. Такое соединение целесообразно применять, если в использованном преобразователе уровней интерфейса имеется только один передатчик. Если же преобразователь интерфейса имеет два передатчика, то блок-схема может быть представлена следующим образом (рис.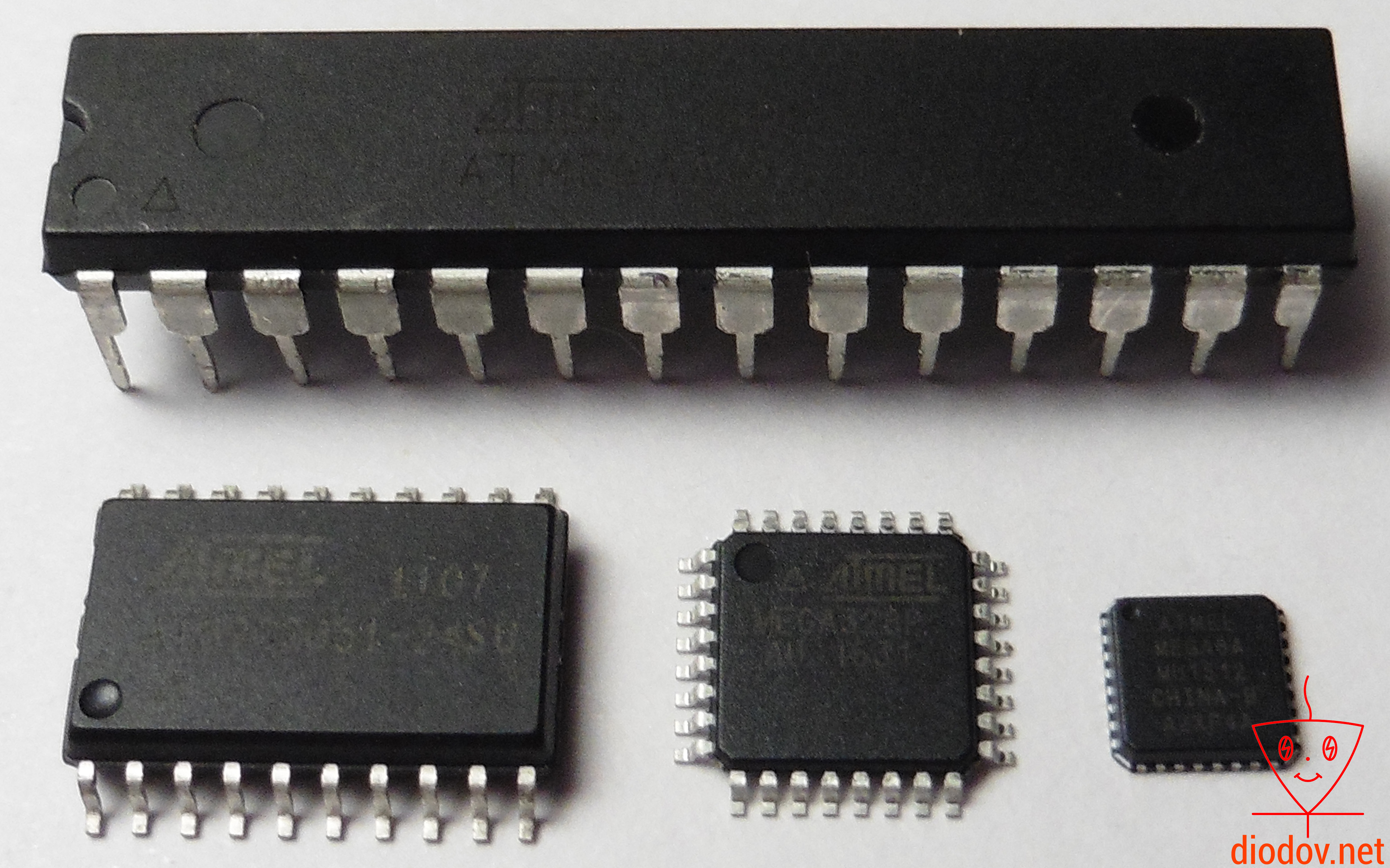 3). Как можно увидеть из блок-схемы, отсутствующее непосредственное соединение линий RxD и DSR (как в блок-схеме рис. 2) заменено соответствующим соединением этих сигналов, когда они имеют еще уровни TTL то есть это соединение организовано на входах двух передатчиков.
3). Как можно увидеть из блок-схемы, отсутствующее непосредственное соединение линий RxD и DSR (как в блок-схеме рис. 2) заменено соответствующим соединением этих сигналов, когда они имеют еще уровни TTL то есть это соединение организовано на входах двух передатчиков.
Использование двух передатчиков более предпочтительно, чем одного, поскольку в этом случае каждый передатчик работает только на один приемник (на одну нагрузку). При использовании же одного передатчика, как на рис. 2, он работает уже на два приемника, каждый из которых имеет нагрузку в 5 кОм, то есть нагрузка передатчика в этом случае составляет уже 2,5 кОм. Это несколько снижает длительность фронта и спада сигнала передатчика, но, поскольку современные микросхемы передатчиков достаточно мощные, к особым негативным результатам не приводит. Использование двух передатчиков имеет смысл, если они присутствуют в преобразователе уровней интерфейса (почему бы их не использовать, если они уже есть!). По блок-схеме рис. 3 с компьютером сопряжено большинство микроконтроллеров, приведенных в статье по аппаратным средствам, поскольку в схемах их сопряжения используются преобразователи, имеющие два передатчика. Как можно догадаться, применение двух передатчиков вместо одного никоим образом не нарушает логику алгоритма обмена.
Как можно догадаться, применение двух передатчиков вместо одного никоим образом не нарушает логику алгоритма обмена.
Подчеркнем, что, как видно из рис. 2 и рис. 3, линия RxD микроконтроллера не требует «раздвоения», подобного линиям RxD и DSR. Это возможно в связи с тем, что чтение состояния линии RxD микроконтроллером не вызывает никаких трудностей, поскольку эта линия является помимо входа приемника RS232 обычным цифровым входом, то есть портом ввода/вывода.
При аппаратной синхронизации требуется не только читать состояние линии RxD, но еще и устанавливать линию TxD в то или иное состояние, соответствующее разрешению или запрету передачи. Линию TxD компьютера возможно установить программно в произвольное состояние (установив или сбросив бит № 6 регистра управления линиями (адрес 3fbh), то есть бит BREAK [2], [3], [9]). Что касается микроконтроллеров, то большинство из них позволяет устанавливать линию TxD в произвольное состояние, как если бы она являлась обычным выходом цифрового порта ввода/вывода.
Исключением являются микроконтроллеры семейств C8051FXXX производства Silicon Laboratories. В этих микроконтроллерах, если порт ввода/вывода выбран матрицей соединений для передачи информации по интерфейсу RS232 (как линия ТxD), то он уже недоступен как обычный порт вывода, и программным способом его состояние изменять уже невозможно. Тем не менее, решить задачу аппаратной синхронизации для микроконтроллеров этого семейства возможно, но только привлекая дополнительные аппаратные средства. Одно из решений, предложенное автором, заключается в том, что нужно выбрать еще один какой-либо дополнительный цифровой порт ввода/вывода (PX.X), состояние выхода которого можно изменять программным способом (для этого порт требуется освободить от всех альтернативных функций), и объединить его выход с линией TxD по схеме 2И. В этом случае логическая блок-схема сопряжения компьютера с микроконтроллером несколько модифицируется (рис. 4).
Рис. 4. Логическая блок-схема сопряжения компьютера с микроконтроллерами семейств C8051FXXX для целей штатного режима работы при аппаратной синхронизации линиями данных с двумя передатчиками
В следующей части статьи мы поговорим о реализации на практике приведенного нового алгоритма обмена данными.
Продолжение следует
Литература
- Баррингтон Брюс Б. Как создавался Кларион. // Мир ПК. 1993. № 2.
- Кузьминов А. Ю. Интерфейс RS232. Связь между компьютером и микроконтроллером. От DOS к Windows98/XP — М.: ДМК-ПРЕСС. 2006 (в печати).
- Кузьминов А. Ю. Интерфейс RS232. Связь между компьютером и микроконтроллером. — М.: Радио и связь. 2004.
- Кузьминов А. Ю. Однокристальные микроэвм — основа удаленных систем сбора и обработки сигналов, поступающих с датчиков. // Электроника и компоненты. 1998. № 2.
- Кузьминов А. Ю. Новые MCS51 — совместимые микроконтроллеры и их применение в системах сбора информации с датчиков. // Контрольно — измерительные приборы и системы. 1997. № 6. C. 32–35; 1998. № 7.
- Кузьминов А. Ю. Удаленные системы сбора информации с датчиков на базе однокристальных микроЭВМ. // Автоматизация и производство. 1996. № 3.
- Кузьминов А. Ю. Универсальная система сбора и обработки данных АСИР-3. // Мир ПК. 1996. № 6.
- Орлов А. Два звучных слова — Clarion и Delphi. // Мир ПК. 1996. № 6.
- Фролов А. В., Фролов Г. В. Программирование модемов. М.: ДИАЛОГ-МИФИ. 1993.
- www.analog.com
- www.atmel.com
- www.maxim-ic.com
- www.semiconductor-philips.com
- www.silabs.com
- www.ti.com
- www.msdn.microsoft.com/library
- www.gapdev.com
- www.sysinternal.com
 // Мир ПК. 1996. № 6.
// Мир ПК. 1996. № 6.| MCU | Основные характеристики | Интересное развитие | Объявление о наличии |
| LAPIS ML620530/540/550 | ПЗУ 256 КБ (макс.), 90-канальные порты общего назначения, 20-канальный аналого-цифровой преобразователь последовательного приближения, 8-канальный многофункциональный таймер для шагового двигателя, генераторы импульсов, 1-канальный трехфазный ШИМ и порты последовательной связи для беспроводных ИС, периферийных микроконтроллеров | Обеспечивает беспроводное соединение с оборудованием HEMS / BEMS и многоканальным аналоговым входом. Недавно разработанный аналого-цифровой преобразователь последовательного приближения имеет скорость преобразования 1,25 мкс и высокую точность (± 1%) колебательный контур. | Образцы доступны с февраля 2015 г. Товар доступен с августа 2015 г. |
| Микрочип PIC16F18877 | включает новые функции энергосбережения, в том числе режимы ожидания / дремоты и отключение периферийного модуля (PMD) в дополнение к технологии низкого энергопотребления XLP. | Обеспечивает высокий уровень независимых от ядра периферийных устройств, которые можно комбинировать для выполнения широкого спектра функций | Доступен напрямую с Microchip |
| Renesas RX231 | Ядро ЦП достигает 4 баллов в тесте производительности.16 CoreMark / МГц, что на 35 процентов выше, чем у серии RX200 потребляет всего 0,8 мкА в режиме ожидания, сохраняя при этом содержимое регистров SRAM и ЦП, и потребляет только 120 мкА / Гц, когда ЦП активен с отключенными периферийными устройствами. | позволяет существенно снизить потери мощности для системы в целом при обработке | Начало серийного производства в сентябре 2015 г. |
| Freescale S32K MCU | — новое семейство продуктов включает комплект для разработки программного обеспечения автомобильного уровня, который предоставляет промежуточное ПО для драйверов S32K.Не менее важно то, что он включает платформу разработки под названием S32 Design Studio, которая включает программное обеспечение и инструменты проектирования. | Разработан для инженеров-программистов. сочетание производительности ARM Cortex-M4 с функциональностью DSP и высоким коэффициентом повторного использования | По словам Freescale, образцы устройствS32K и комплект для разработки программного обеспечения будут доступны в третьем квартале 2015 года. |
| Renesas RL 78 / G1F | • Специальная подсистема управления двигателем с новым вспомогательным таймером поддерживает работу на частоте до 64 МГц. • Настраиваемый программно-конфигурируемый PGA с высокой скоростью нарастания выходного напряжения снижает затраты и упрощает разработку. • Двухканальный высокоскоростной компаратор обеспечивает надежное обнаружение перегрузки по току и определение положения ротора. Цифро-аналоговый преобразователь и функция связи IrDA (Infrared Data Association) | обеспечивает высокую скорость вращения двигателя с повышенным КПД и снижением системных затрат | варьируется в зависимости от объема памяти, упаковки и количества контактов, так как линейка MCU включает 20 версий продукта |
| Atmel SMART SAM G54 / G55 | ЕщеSRAM, интегрированные алгоритмы объединения датчиков, несколько доменов синхронизации, позволяющие индивидуально синхронизировать различные части микроконтроллера для экономии энергии. | идеально подходит для концентраторов датчиков и потребительских приложений с батарейным питанием. | Доступно онлайн |
| Marvell 88MZ300 беспроводной микроконтроллер система на кристалле (SoC) | • Полностью интегрированный приемопередатчик IEEE 802. 15.4 15.4• SoC интегрирована с человеко-машинным интерфейсом для поддержки различных приложений микроконтроллеров. • Высочайшая производительность РЧ с бюджетом канала 120 дБм и лучшая в отрасли производительность сосуществования • Сверхнизкое энергопотребление с 8.Ток приема 5 мА и ток в режиме ожидания 1 мкА Инновационная технология XIP (выполнение на месте), которая поддерживает прямое выполнение кода из флэш-памяти | разработан для обеспечения улучшенного качества канала передачи данных с уменьшением потерь сообщений для повышения удобства работы пользователей | Отбор проб в пакетах QFN-32 5 × 5 мм |
| Atmel SMART SAM DA1 | включает в себя PTC, обеспечивающий высокую производительность и низкое энергопотребление емкостной сенсорной поддержки, в компактном корпусе QFN 5×5 мм со смачиваемыми боковыми сторонами для автоматического оптического контроля | улучшенные автомобильные информационно-развлекательные приложения на основе емкостного сенсорного управления | Объявлен в феврале, общий отбор проб начнется в апреле 2015 года |
| Broadcom BCM58100 MCU | первое семейство защищенных микроконтроллеров со встроенной коммуникацией ближнего поля (NFC) | интегрирует NFC для приложений Tap-to-Access, Tap-to-Pair и Tap-to-Pay с высоким уровнем безопасности | Отбор проб с апреля 2015 г. |
| Infineon XMC4800 | первый узел EtherCAT, интегрированный в контроллер ARM Cortex-M со встроенной флэш-памятью и возможностями аналогового / смешанного сигнала | позволяет создавать самые компактные конструкции, устраняя необходимость в выделенной ASIC EtherCAT, внешней памяти и кристалле | Образцы доступны с августа 2015 г.Объем производства с 1 кв.2016 г. |
| Renesas RX23T Group | встроенный FPU (блок обработки с плавающей запятой) для ядра RX200 ток, потребляемый в программном режиме ожидания (с сохранением ОЗУ), составляет всего 0,45 мкА | точное управление и более тихий мотор в бытовой технике | Серийное производство с августа 2015 г. |
| STMicroelectronics SPC58NExx | MCU, соответствующие стандартам безопасности автомобилей, шифрование для безопасности и увеличенный объем памяти для хранения важных программ и данных | отказоустойчивых микроконтроллера для требовательных приложений в автомобиле | Самлпинг с апреля 2015 г. |
| STMicroelectronics STM32F469 / 479 | Ядро микроконтроллера ARM Cortex-M4, дополненное ускорителем Chrom-ART и ускорителем ART, которые ускоряют графику и обработку в реальном времени, а также обеспечивают доступ к программной памяти микроконтроллера | последовательный интерфейс дисплея MIPI) был интегрирован в дополнение к контроллеру TFT-LCD.Интерфейсы дисплея LCD-TFT и MIPI-DSI обеспечивают расширенный пользовательский интерфейс, предоставляя достаточно ресурсов для обработки запросов в реальном времени | Отбор проб с апреля 2015 г. |
| STMicroelectronicsSTM32L4 | При активном энергопотреблении всего 100 мкА / МГц эта ИС может достичь производительности до 100 DMIPS | Оптимизирован для сверхнизкого энергопотребления носимых устройств | Общий выпуск — 2 квартал 2015 г. |
Введение в микроконтроллеры — инженерные проекты
Привет, народ! Мы здесь, чтобы держать вас в курсе полезной информации, чтобы вы продолжали возвращаться к тому, что мы можем предложить.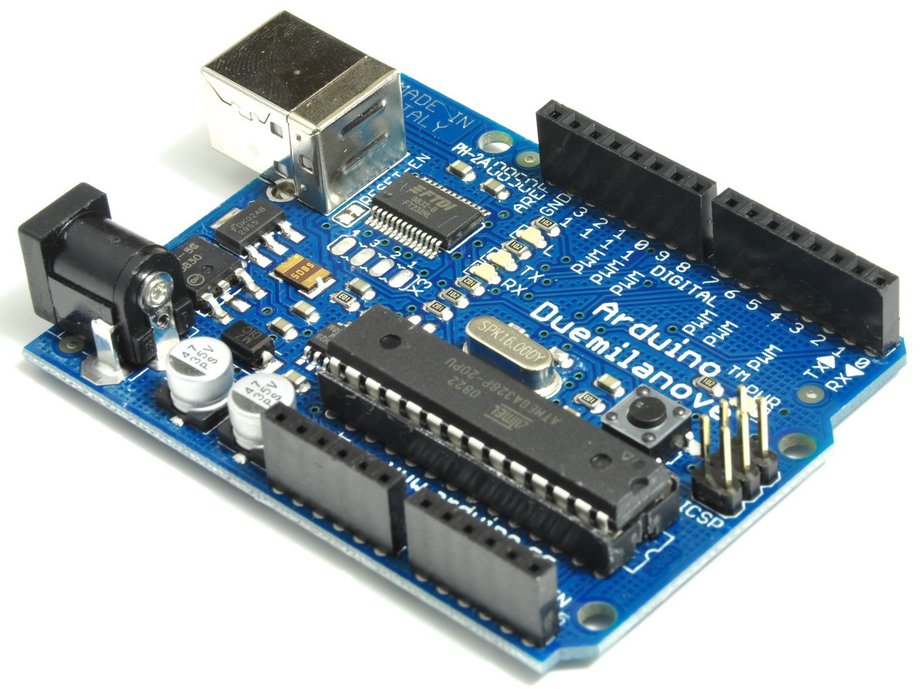 Сегодня я собираюсь открыть подробности о Introduction to Microcontrollers . Микроконтроллер — это электронное устройство, способное эффективно выполнять различные задачи в системах автоматического управления. Он состоит из памяти, портов ввода / вывода и процессора. Мы используем C и язык ассемблера для программирования микроконтроллера. Это похоже на крошечные компьютеры, которые помогают облегчить наши задачи с помощью программирования, используемого в компактных схемах. Я постараюсь охватить каждый аспект, связанный с микроконтроллером, чтобы вы получили четкое представление о том, что он делает и каковы его основные приложения.Будем надеяться на плату и изучать свойства микроконтроллера один за другим.
Сегодня я собираюсь открыть подробности о Introduction to Microcontrollers . Микроконтроллер — это электронное устройство, способное эффективно выполнять различные задачи в системах автоматического управления. Он состоит из памяти, портов ввода / вывода и процессора. Мы используем C и язык ассемблера для программирования микроконтроллера. Это похоже на крошечные компьютеры, которые помогают облегчить наши задачи с помощью программирования, используемого в компактных схемах. Я постараюсь охватить каждый аспект, связанный с микроконтроллером, чтобы вы получили четкое представление о том, что он делает и каковы его основные приложения.Будем надеяться на плату и изучать свойства микроконтроллера один за другим.Введение в микроконтроллеры
- Микроконтроллер — это компактный крошечный компьютер, который изготовлен внутри микросхемы и используется в системах автоматического управления, включая системы безопасности, офисные машины, электроинструменты, системы сигнализации, управление светофорами, стиральную машину и многое другое. более.
- Это экономичное программируемое логическое управление, которое может быть сопряжено с внешними устройствами для управления устройствами на расстоянии.
- Первый микроконтроллер был произведен Майклом Кокраном и Гэри Бун .
 более.
более.- Он был специально создан для встраиваемых систем и состоял из памяти для чтения и записи, постоянной памяти, портов ввода-вывода, процессора и встроенных часов.
- C и языки ассемблера используются для программирования микроконтроллеров.
- Существуют также другие языки, доступные для программирования микроконтроллера, но для начала изучение программирования микроконтроллера на языке C и ассемблере — отличный выбор, оба языка просты в изучении и дают четкое представление о микроконтроллере.
- Технологии претерпели удивительные изменения и сделали нашу жизнь проще, чем когда-либо прежде.
- Несколько лет назад приведение лифта в рабочее состояние было адской задачей, требующей сложного программирования и схемотехники.
- Теперь вы можете не только управлять лифтом с микроконтроллера, но и перемещать подводную лодку с помощью соответствующих инструкций, передаваемых в один микроконтроллер.
- Любое приложение, которое включает измерения, управление и отображение, содержит внутри микроконтроллер.
- Микроконтроллеры поставляются с широким спектром приложений, но решать, какую задачу вы хотите решить с помощью микроконтроллера, зависит только от вас, потому что он будет принимать только инструкции в форме языка программирования.
- Вы можете создавать, загружать и запускать любую программу в зависимости от ваших приоритетов.

Сравнение с микропроцессором
- Некоторые люди думают, что микроконтроллер и микропроцессор одинаковы, но на самом деле они разные.
- Микропроцессор использует внешнюю схему для установления связи с периферийной средой, но микроконтроллер не включает никаких внешних схем, чтобы привести его в рабочее состояние, поскольку он поставляется со специальной встроенной схемой, которая экономит место и экономит средства для разработки устройство аналогичных характеристик.
- По сравнению с микропроцессорами, которые широко используются в ПК, ноутбуках и ноутбуках, микроконтроллеры специально созданы для встроенных систем.
- Когда мы говорим о встроенной системе, мы фактически имеем в виду устройства, которые имеют встроенную схему и нуждаются в загрузке соответствующих инструкций для управления устройствами.
- Во встроенной системе замечательно то, что она включает индивидуальное программирование, которое напрямую связано с внутренней схемой, которую можно изменять снова и снова, пока вы не достигнете желаемого результата.
- Тактовая частота микропроцессора намного больше, чем у микроконтроллера, и они способны выполнять сложные задачи. Они могут работать на частоте 1 ГГц.

Сравнение с настольными компьютерами
- В отличие от нашего настольного компьютера микроконтроллеры представляют собой крошечные компьютеры, в которых объем памяти намного меньше, чем у настольных компьютеров.
- Также скорость настольного компьютера намного больше, чем скорость простого микроконтроллера.
- Однако микроконтроллеры обладают некоторыми функциями, аналогичными настольным компьютерам, например, они оснащены центральным процессором, который является мозгом микроконтроллера.
- Эти ЦП в микроконтроллерах имеют разную длину слова, то есть от 4 до 64 бит.
- Они могут работать на более низких частотах при 4 кГц и могут сохранять функциональность до нажатия кнопки сброса или вызова какого-либо прерывания.

Характеристики микроконтроллера
- В современных технологиях некоторые микроконтроллеры имеют сложную конструкцию и могут иметь длину слова более 64 бит.
- Микроконтроллер состоит из встроенных компонентов, включая EPROM, EEPROM, RAM, ROM, таймеры, порты ввода / вывода и кнопку сброса.RAM используется для хранения данных, а ROM используется для хранения программ и других параметров.
- Современные микроконтроллеры спроектированы с использованием архитектуры CISC (компьютер со сложным набором команд), которая включает инструкции типа marco.
- Инструкция типа одиночного макроса используется для замены количества маленьких инструкций.
- Современные микроконтроллеры потребляют гораздо меньше энергии по сравнению со старыми.
- Они могут работать при более низком напряжении в диапазоне от 1.От 8 В до 5,5 В.
- Флэш-память, такая как EPROM и EEPROM, — это очень надежные и расширенные функции в последних микроконтроллерах, которые отличают их от старых микроконтроллеров.
- EPROM быстрее и быстрее, чем память EEPROM. Он позволяет стирать и записывать циклы столько раз, сколько вы хотите, что делает его удобным для пользователя.

Детали микроконтроллера
- Микроконтроллер состоит из нескольких встроенных частей, что делает его компактным и производительным при меньшем пространстве и меньших затратах.Ниже приведены основные части микроконтроллера.
CPU
- CPU рассматривается как мозг микроконтроллера, который принимает инструкции в форме программирования и помогает их выполнять.
- Он ведет себя как мост, который обменивается данными с различными компонентами и действиями, происходящими внутри одного чипа.
- Возможность индивидуального программирования, доступная в микроконтроллере, делает его более надежным и удобным для пользователя. ЦП
- имеет встроенные регистры, которые разделены на регистры данных двух типов и регистры адресации.
- Регистры данных, также известные как аккумуляторы, используются для логических команд и команд сдвига.
- Регистры адресации используются для хранения адресов для доступа к данным памяти. Указатель стека называется адресным регистром, который направляет память, используемую для аппаратного стека. Аппаратный стек используется для вызовов и возвратов прерываний, а также для вызовов и возвратов подпрограмм.
- Конструкция указателя аппаратного стека не является обязательной, некоторые ЦП имеют регистр с одной связью, который ведет себя как глубокий стек ЦП и помогает в быстрых вызовах и возвратах подпрограмм.
- ЦП микроконтроллера способен выполнять серию инструкций, некоторые из которых являются инструкциями манипулирования данными, некоторые — логическими инструкциями, а некоторые — инструкциями сдвига.


Ввод / вывод
- В микроконтроллер встроены различные порты ввода / вывода.
- Они используются для подключения к микроконтроллеру внешних устройств, таких как принтеры, ЖК-дисплей, светодиоды, внешняя память.
- В микроконтроллере имеется несколько последовательных портов, которые используются для последовательного подключения периферийных устройств к микроконтроллеру.
Память
- Как и микропроцессор, микроконтроллер имеет такие области памяти, как RAM и ROM, которые помогают хранить исходный код программы.
- Эти объемы памяти очень малы по сравнению с настольными компьютерами.
- После того, как вы сгенерируете программу и загрузите ее в микроконтроллер, она сохраняется в определенной области памяти микроконтроллера.
- Эти ячейки памяти уже установлены производителем.
Таймеры и счетчики
- Таймеры и счетчики очень удобны для решения различных задач, включая генерацию импульсов, генерацию частоты, измерение, функцию синхронизации и модуляцию.
- Функции таймера и счетчиков синхронизируются с часами микроконтроллера, используются для измерения временных интервалов между двумя событиями и могут подсчитывать до 255 отсчетов для 8-битного микроконтроллера и 65535 для 16-битного микроконтроллера.
АЦП и ЦАП
- АЦП — это аналого-цифровой преобразователь, который преобразует аналоговый сигнал в цифровую форму, например преобразовывает аналоговый сигнал датчика в цифровую форму.
- Точно так же ЦАП представляет собой цифро-аналоговый преобразователь, который преобразует цифровой сигнал в аналоговую форму, которая может использоваться для управления двигателем.
Interpret Control
- Interpret Control используется для установки задержки в выполняющейся программе. Эта задержка может быть вызвана внутренними или внешними сигналами.
 Эта задержка может быть вызвана внутренними или внешними сигналами.
Эта задержка может быть вызвана внутренними или внешними сигналами.Специальный функциональный блок
- Некоторые современные микроконтроллеры поставляются со специальным функциональным блоком, который используется в новейшей робототехнике и передовых космических системах.
- Этот специальный функциональный блок имеет больше портов, чем обычный микроконтроллер, и способен выполнять самые сложные и продвинутые задачи.
Типы микроконтроллеров
В зависимости от памяти, архитектуры и размера слова микроконтроллеры подразделяются на различные типы. Некоторые из них следующие.Классификация на основе битов
- Микроконтроллеры бывают 8-битные, 16-битные, 32-битные и 64-битные. Некоторые наиболее продвинутые микроконтроллеры имеют биты более 64, которые способны выполнять определенные функции во встроенных системах.
- 8-битный микроконтроллер способен выполнять более мелкие арифметические и логические инструкции. Наиболее распространенными 8-битными микроконтроллерами являются atmel 8031 и 8051.
- В отличие от 8-битных микроконтроллеров, 16-битный микроконтроллер выполняет программу с более высокой точностью и точностью. Самый распространенный 16-битный микроконтроллер — 8096.
- 32-битный микроконтроллер применяется в системах автоматического управления и робототехнике, где требуется высокая прочность и надежность. Офисные машины и некоторые системы питания и связи используют 32-битный контроллер для выполнения различных инструкций.
 Наиболее распространенными 8-битными микроконтроллерами являются atmel 8031 и 8051.
Наиболее распространенными 8-битными микроконтроллерами являются atmel 8031 и 8051.Классификация на основе памяти
- На основе памяти микроконтроллеры делятся на два типа i.д. микроконтроллеры с внешней памятью и микроконтроллеры со встроенной памятью.
- Когда встроенной системе требуется как микроконтроллер, так и внешний функциональный блок, который не встроен в микроконтроллер, микроконтроллер называется микроконтроллером с внешней памятью. 8031 — отличный пример микроконтроллера с внешней памятью.
- Когда все функциональные блоки объединены в одну микросхему, соединенную со встроенной системой, микроконтроллер называется микроконтроллером встроенной памяти.8051 — отличный пример микроконтроллеров со встроенной памятью.

Классификация на основе набора команд
- На основе набора команд микроконтроллеры подразделяются на два типа: CISC-CISC и RISC-RISC.
- CISC относится к компьютеру со сложной системой команд. Одной действующей инструкции достаточно, чтобы заменить количество инструкций.
- RISC упоминается как компьютер с сокращенным набором команд. RISC помогает сократить время выполнения программы.Это достигается за счет сокращения тактового цикла на инструкцию.
Типы микроконтроллеров
Существует множество типов микроконтроллеров, и я подробно остановлюсь на некоторых из них:8051 Микроконтроллер
- Наиболее часто используемые микроконтроллеры принадлежат к семейству 8051. Микроконтроллеры
- 8051 считаются идеальным выбором для большинства профессионалов.
- Изобретенный Intel, микроконтроллер 8051 состоит из двух элементов, включая 8052 и 8031.
- 8052 состоит из 3-х кратного и 256 байт RAM. Он обладает теми же функциями, что и микроконтроллер 8051.
- Вы также можете рассматривать 8051 как подмножество микроконтроллера 8052 ..
- Точно так же 8031 обладает теми же функциями, что и 8051, за исключением ПЗУ.
- Однако для выполнения инструкций в этот чип может быть встроено внешнее ПЗУ объемом 64 Кбайт.
8051 Архитектура микроконтроллера
- Микроконтроллер 8051 — это 40-контактный 8-битный микроконтроллер, изобретенный Intel в 1981 году.
- 8051 поставляется со 128 байтами ОЗУ и 4 КБ встроенного ПЗУ.
- В зависимости от приоритетов в микроконтроллер может быть встроена внешняя память объемом 64 КБ.
- В этот микроконтроллер встроен кристаллический генератор с частотой 12 МГц.
- В этот микроконтроллер интегрированы два 16-битных таймера, которые можно использовать как таймер, а также как счетчик.
- 8051 состоит из 5 прерываний, включая внешнее прерывание 0, внешнее прерывание 1, прерывание таймера 0, прерывание таймера 1 и прерывание последовательного порта.Он также состоит из четырех 8-битных программируемых портов.
PIC Микроконтроллер
- Технология микрочипов изобрела контроллер периферийного интерфейса (PIC), который очень распространен среди большинства профессионалов и экспертов.
- Micro-Chip Technology очень заботится о потребностях и требованиях клиентов, поэтому они постоянно обновляют свои продукты, чтобы обеспечить первоклассный сервис.
- Низкая стоимость, возможность последовательного программирования и широкая доступность выделяют этот микроконтроллер среди остальных.
Архитектура микроконтроллера PIC
- Микроконтроллер PIC поддерживает архитектуру Гарварда.
- Он состоит из ПЗУ, ЦП, последовательной связи, таймеров и счетчиков, генераторов, прерываний, портов ввода-вывода и набора регистров, которые также работают как ОЗУ.
- Регистры специального назначения также встроены в аппаратное обеспечение микросхемы.
- Низкое энергопотребление делает этот контроллер идеальным выбором для промышленных целей.
- Каждый PIC задействует «стек», способный сохранять адреса возврата.
- В более старых версиях микроконтроллеров PIC доступ к стеку нельзя было получить с помощью программирования, но к более поздним версиям можно было легко получить доступ с помощью программирования.
- Компьютера с низкими техническими характеристиками достаточно для запуска программного обеспечения, способного программировать схему микроконтроллера PIC.
- Последовательный порт или USB-порт используется для подключения компьютера к микроконтроллеру.

Микроконтроллер AVR
- AVR называется Advances Virtual RISC, который был произведен Atmel в 1966 году.
- Он поддерживает Гарвардскую архитектуру, в которой программа и данные хранятся в разных областях микроконтроллера и к ним легко получить доступ.
- Считается более ранним типом контроллеров, в которых для хранения программы используется встроенная флэш-память.
Архитектура AVR
- Архитектура AVR была разработана Вегардом Волланом и Альф-Эгилем Богеном.
- AT90S8515 был первым контроллером, основанным на архитектуре AVR.
- Однако AT90S1200 был первым микроконтроллером AVR, который был коммерчески доступен в 1997 году.
- Флэш-память, EEPROM и SRAM интегрированы в один чип, что исключает возможность объединения любой внешней памяти с контроллером.
- Этот контроллер имеет сторожевой таймер и множество энергосберегающих спящих режимов, которые делают этот контроллер надежным и удобным для пользователя.
Приложения
- Периферийный контроллер ПК
- Робототехника и встроенные системы
- Биомедицинское оборудование
- Системы связи и питания
- Автомобили и системы безопасности
- Имплантированное медицинское оборудование
- Устройства обнаружения пожара
- Температура и светочувствительные устройства
- Устройства промышленной автоматизации
- Устройства управления технологическими процессами
- Измерение и контроль вращающихся объектов
 Надеюсь, вам понравилась статья. Наша задача — шаг за шагом предоставлять вам полезную информацию, чтобы вы могли ее усвоить без особых усилий. Однако, если вы все еще настроены скептически или сомневаетесь, вы можете спросить меня в разделе комментариев ниже. Я хотел бы помочь вам в соответствии с моим опытом. Будьте на связи.
Надеюсь, вам понравилась статья. Наша задача — шаг за шагом предоставлять вам полезную информацию, чтобы вы могли ее усвоить без особых усилий. Однако, если вы все еще настроены скептически или сомневаетесь, вы можете спросить меня в разделе комментариев ниже. Я хотел бы помочь вам в соответствии с моим опытом. Будьте на связи.Типы и применение микроконтроллеров — EIT | Инженерный технологический институт: EIT
Введение в микроконтроллер:
Микроконтроллер (микроконтроллер или микроконтроллер) представляет собой микрокомпьютер с одиночной микросхемой, изготовленный на базе СБИС.Микроконтроллер также известен как встроенный контроллер. Сегодня на рынке доступны различные типы микроконтроллеров с разной длиной слова, такие как 4-битные, 8-битные, 64-битные и 128-битные микроконтроллеры. Микроконтроллер — это сжатый микрокомпьютер, предназначенный для управления функциями встроенных систем в офисных машинах, роботах, бытовой технике, автомобилях и ряде других гаджетов. Микроконтроллер состоит из таких компонентов, как память, периферийные устройства и, самое главное, процессор. Микроконтроллеры в основном используются в устройствах, которым требуется степень контроля со стороны пользователя устройства.
Микроконтроллеры в основном используются в устройствах, которым требуется степень контроля со стороны пользователя устройства.
Основы микроконтроллера:
Любое электрическое устройство, которое хранит, измеряет, отображает информацию или вычисляет, состоит из микросхемы микроконтроллера
внутри себя. Базовая структура микроконтроллера состоит из: —
1. ЦП — Мозг микроконтроллера называется ЦП. ЦП — это устройство, которое используется для получения данных, их декодирования и успешного завершения поставленной задачи.С помощью центрального процессора все компоненты микроконтроллера объединены в единую систему. Выборка инструкции
, редактируемая программируемой памятью, декодируется ЦП.
2. Память — В микроконтроллере микросхема памяти работает так же, как микропроцессор. Чип памяти хранит все программы и данные. Микроконтроллеры построены с определенным объемом ПЗУ или ОЗУ (EPROM, EEPROM и т.д.) или флэш-памятью для хранения исходных кодов программ.
3. Порты ввода / вывода — порты ввода / вывода в основном используются для взаимодействия или управления различными устройствами, такими как принтеры, ЖК-дисплеи, светодиоды и т. Д.
Порты ввода / вывода — порты ввода / вывода в основном используются для взаимодействия или управления различными устройствами, такими как принтеры, ЖК-дисплеи, светодиоды и т. Д.
4. Последовательные порты — эти порты предоставляют последовательные интерфейсы между микроконтроллером и различными другими периферийными устройствами, такими как параллельный порт.
5. Таймеры — микроконтроллер может быть встроен с одним или несколькими таймерами или счетчиками. Таймеры и счетчики контролируют все операции подсчета и синхронизации в микроконтроллере. Таймеры используются для подсчета внешних импульсов. Основными операциями, выполняемыми таймерами, являются генерация импульсов, функции часов, измерение частоты, модуляция, создание колебаний и т. Д.
6.ADC (Аналого-цифровой преобразователь) –ADC используется для преобразования аналоговых сигналов в цифровые. Входные сигналы должны быть аналоговыми для АЦП. Производство цифровых сигналов может использоваться для различных цифровых приложений (например, для измерительных устройств).
7. ЦАП (цифро-аналоговый преобразователь) — этот преобразователь выполняет функции, противоположные АЦП. Это устройство обычно используется для контроля аналоговых устройств, таких как двигатели постоянного тока и т. Д.
8. Интерпретируемое управление. Этот контроллер используется для обеспечения отложенного управления рабочей программой.Интерпретация может быть внутренней или внешней.
9. Специальный функциональный блок — Некоторые специальные микроконтроллеры, изготовленные для специальных устройств, таких как космические системы, роботы и т.д., содержат этот специальный функциональный блок. Этот специальный блок имеет дополнительные порты для выполнения некоторых специальных операций.
Типы микроконтроллеров:
Микроконтроллеры делятся на категории в соответствии с их памятью, архитектурой, битами и наборами команд
.Итак, давайте обсудим типы микроконтроллеров:
бит:
8-битный микроконтроллер выполняет логические и арифметические операции. Примером 8-битного микроконтроллера является Intel 8031/8051. Микроконтроллер
16 бит работает с большей точностью и производительностью в отличие от 8-битного.
Примером 16-разрядного микроконтроллера является Intel 8096.
32-разрядный микроконтроллер используется в основном в устройствах с автоматическим управлением, таких как офисные машины, имплантируемые медицинские приборы и т. Д.Для выполнения любых логических или арифметических функций требуются 32 — битные инструкции.
Память:
- Микроконтроллер с внешней памятью — когда встроенная структура построена с микроконтроллером, который не включает все функционирующие блоки, существующие на микросхеме, он называется микроконтроллером внешней памяти. Для иллюстрации — микроконтроллер 8031 не имеет памяти программ на микросхеме.
- Микроконтроллер со встроенной памятью — когда встроенная структура построена с микроконтроллером, который состоит из всех функциональных блоков, существующих на чипе, он называется микроконтроллером встроенной памяти.Для иллюстрации — микроконтроллер 8051 имеет всю память программ и данных, счетчики и таймеры, прерывания, порты ввода / вывода и, следовательно, свой микроконтроллер встроенной памяти.
Набор команд:
CISC-CISC означает компьютер со сложным набором команд, он позволяет пользователю применять 1 команду как
в качестве альтернативы многим простым инструкциям.
RISC-RISC означает компьютеры с сокращенным набором команд. RISC сокращает время работы на
, сокращая тактовый цикл на инструкцию.
Архитектура памяти:
- Гарвардский микроконтроллер с архитектурой памяти
- Принстонский микроконтроллер с архитектурой памяти
8051 микроконтроллер:
Наиболее широко используемый набор микроконтроллеров относится к семейству 8051. Микроконтроллеры 8051 продолжают оставаться идеальным выбором для огромной группы любителей и экспертов. В течение 8051 года человечество стало свидетелем самого революционного набора микроконтроллеров. Первоначально микроконтроллер 8051 был изобретен Intel.Два других члена этого семейства 8051 —
- 8052-Этот микроконтроллер имеет 3 таймера и 256 байт ОЗУ. Кроме того, он имеет все функции традиционного микроконтроллера 8051. Микроконтроллер 8051 является подмножеством микроконтроллера 8052.
- 8031 - Этот микроконтроллер меньше ПЗУ, за исключением того, что он имеет все функции традиционного микроконтроллера 8051. Для выполнения в его микросхему можно добавить внешнее ПЗУ размером 64 Кбайт.
8051 задействует 2 различных типа памяти, такие как NV-RAM, UV-EPROM и Flash.
8051 Архитектура микроконтроллера:
Микроконтроллер 8051 — это восьмиразрядный микроконтроллер, выпущенный в 1981 году корпорацией Intel. Он доступен в 40-контактном DIP-корпусе (двухрядный корпус). Он имеет 4 КБ ПЗУ (программируемое пространство на кристалле) и 128 байтов встроенного ОЗУ, при желании 64 КБ внешней памяти могут быть связаны с микроконтроллером. Есть четыре параллельных 8-битных порта, которые легко программируются и адресуются. Встроенный кварцевый генератор интегрирован в микроконтроллер с тактовой частотой 12 МГц.В микроконтроллере есть последовательный порт ввода / вывода с 2 контактами. В него также встроены два таймера по 16 бит; эти таймеры могут использоваться как таймеры для внутреннего функционирования, а также как счетчики для внешнего функционирования. Микроконтроллер состоит из 5 источников прерываний, а именно: прерывание от последовательного порта
, прерывание от таймера 1, внешнее прерывание 0, прерывание от таймера 0, внешнее прерывание 1. Режим программирования этого контроллера micro-
включает в себя GPR (регистры общего назначения), SFR (специальные регистры). регистры функций) и SPR (регистры специального назначения).
PIC Микроконтроллер:
Контроллер периферийного интерфейса (PIC), предоставленный Micro-chip Technology для классификации своих микроконтроллеров с одиночным чипом. Эти устройства оказались чрезвычайно успешными в 8-битных микроконтроллерах. Основная причина этого заключается в том, что Micro-Chip Technology постоянно модернизирует архитектуру устройства и включает в микроконтроллер так много необходимых периферийных устройств, чтобы удовлетворить потребности клиентов. Микроконтроллеры PIC очень популярны среди любителей и промышленников; это единственная причина широкой доступности, низкой стоимости, большой базы пользователей и возможности последовательного программирования.
Архитектура микроконтроллера PIC:
Архитектура 8-битных микроконтроллеров PIC может быть отнесена к следующей категории:
1. Архитектура базовой линии — В базовую архитектуру микроконтроллеры PIC семейства PIC10F включены, кроме этой части PIC12 и PIC16 семьи также включены. Эти устройства используют 12-битную архитектуру программного слова с альтернативами от шести до двадцати восьми выводов.
Кратко определенный набор атрибутов базовой архитектуры позволяет создавать наиболее прибыльные продуктовые решения.Эта архитектура идеально подходит для гаджетов с батарейным питанием. Серия PIC10F200 — это еще один недорогой 8-битный микроконтроллер флэш-памяти с 6-контактным корпусом.
2. Архитектура среднего диапазона — в эту среднюю линию добавлены семейства PIC12 и PIC16, которые атрибутируют 14-битную архитектуру программного слова. Гаджеты PIC16 среднего уровня предлагают широкий спектр вариантов пакетов (от 8 до 64 пакетов) с низким и высоким уровнем включения периферийных устройств
. Это устройство PIC16 поддерживает различные аналоговые, цифровые и последовательные периферийные устройства, такие как SPI, USART, I2C, USB, ЖК-дисплеи и аналого-цифровые преобразователи.Микроконтроллеры PIC16 среднего уровня обладают функцией приостановки управления с восьмиуровневой аппаратной нагрузкой.
3. Высокопроизводительная архитектура. Высокопроизводительная архитектура включала семейство устройств PIC18. Эти микроконтроллеры используют 16-битную архитектуру программного слова вместе с альтернативами от 18 до 100 выводов. Устройства PIC18 представляют собой высокопроизводительные микроконтроллеры со встроенными аналого-цифровыми преобразователями. Все микроконтроллеры PIC18 объединяют высокоразвитую архитектуру RISC, которая поддерживает флеш-устройства.PIC18 имеет улучшенные атрибуты фундамента, 32 уровня глубокой нагрузки и несколько внутренних и внешних прерываний.
AVR Микроконтроллер:
AVR, также известный как Advanced Virtual RISC, представляет собой 8-битный микроконтроллер с одиночным чипом RISC с 8-разрядной архитектурой Гарварда. Он был изобретен Атмелем в 1966 году. Гарвардская архитектура означает, что программа и данные накапливаются в разных местах и используются одновременно. Это было одно из передовых семейств микроконтроллеров, в которых встроенная флеш-память использовалась в основном для хранения программ, в отличие от одноразовых программируемых EPROM, EEPROM или ROM, используемых другими микроконтроллерами одновременно.Флэш-память — это энергонезависимая (постоянная при отключении питания) программируемая память. Архитектура микроконтроллера AVR: Архитектура микроконтроллера AVR
была разработана Альф-Эгилем Богеном и Вегардом Волланом. Название AVR образовано от имен разработчиков архитектуры микроконтроллера. AT90S8515 был передовым микроконтроллером, основанным на архитектуре AVR; с другой стороны, первым микроконтроллером, который поразил коммерческий рынок, был AT90S1200, выпущенный в 1997 году.
Все SRAM, Flash и EEPROM объединены в одном кристалле, что устраняет необходимость в любой другой внешней памяти в большинстве устройств. Несколько устройств содержат альтернативу параллельной внешней шины, чтобы добавить дополнительные устройства памяти данных. Приблизительно все устройства, за исключением микросхем TinyAVR, имеют последовательный интерфейс, который используется для соединения больших последовательных микросхем Flash и EEPROM.
AMR Микроконтроллер:
AMR — это название компании, которая разрабатывает архитектуру микропроцессоров.Он также занимается лицензированием их для производителей, которые производят настоящие чипы. На самом деле AMR — это настоящая 32-битная архитектура RISC. Первоначально он был разработан в 1980 году компанией Acorn Computers Ltd. Этот базовый микропроцессор AMR не имеет встроенной флэш-памяти. ARM специально разработан для устройств с микроконтроллерами, его легко обучить и использовать, но он достаточно мощный для самых сложных встраиваемых устройств.
Архитектура микроконтроллера AMR:
Архитектура AMR представляет собой 32-битный RISC-процессор, разработанный ARM Ltd.Благодаря своим свойствам энергосбережения центральные процессоры ARM преобладают на рынке мобильной электроники, где снижение энергопотребления является жизненно важной задачей. Архитектура ARM состоит из нижележащих элементов RISC: —
- Максимальное функционирование за один цикл
- Постоянный регистровый файл размером 16 × 32 бита.
- Загрузить или сохранить архитектуру.
- Заданная ширина команды 32 бита для упрощения конвейерной обработки и декодирования при минимальной плотности кода.
- Для смещенного доступа к памяти нет поддержки
: Микроконтроллеры
предназначены для встраиваемых устройств, в отличие от микропроцессоров, которые используются в ПК или других универсальных устройствах.Микроконтроллеры используются в автоматически управляемых изобретениях и устройствах, таких как электроинструменты, имплантируемые медицинские устройства, системы управления автомобильными двигателями, офисные машины, устройства дистанционного управления, игрушки и многие другие встроенные системы
. Уменьшая размер и затраты по сравнению с конструкцией, в которой используются другой микропроцессор, устройства ввода-вывода и память, микроконтроллеры делают недорогой цифровой контроль все большего числа устройств и операций.Микроконтроллеры смешанного сигнала
являются общими; Сборка аналоговых компонентов требовала управления нецифровыми электронными структурами.
Применение микроконтроллера в повседневных устройствах:
- Светочувствительные устройства и устройства управления
- Устройства измерения и контроля температуры
- Устройства обнаружения пожара и безопасности
- Промышленные контрольно-измерительные приборы
- Устройства управления технологическим процессом
Применение микроконтроллера в промышленных устройствах управления:
- Промышленные контрольно-измерительные приборы
- Устройства управления технологическими процессами
Применение микроконтроллера в измерительных приборах:
- Вольтметр
- Измерение вращающихся объектов
- Счетчик тока
- Переносные измерительные системы
Источник: www.electronicshub.org/microcontrollers/
Что такое микроконтроллер? Определяющие характеристики и архитектура общего компонента
В этой статье мы рассмотрим определяющие характеристики этих чрезвычайно популярных ИС, а затем исследуем внутреннюю архитектуру.
Если бы мне пришлось выбрать один навык, который был бы наиболее ценным дополнением к репертуару любого инженера, это, несомненно, был бы опыт проектирования схем на основе микроконтроллеров.
Микроконтроллер сыграл фундаментальную — я бы даже сказал доминирующую — роль в технологической революции, которая сформировала современную жизнь.Микроконтроллеры — это небольшие, универсальные, недорогие устройства, которые могут быть успешно реализованы и запрограммированы не только опытными инженерами-электриками, но и любителями, студентами и профессионалами из других областей.
Список возможных приложений микроконтроллера настолько велик, что я не решаюсь даже приводить примеры. Недорогие носимые устройства, медицинское оборудование, высококачественная бытовая электроника, защищенные промышленные устройства, современные военные и аэрокосмические системы — эти адаптируемые, доступные и удобные в использовании компоненты являются долгожданным дополнением практически к любому электронному продукту.
Этот генератор сигналов произвольной формы — одна из многих печатных плат, которые я разработал на основе 8-битного микроконтроллера.В этой статье мы рассмотрим определение микроконтроллера и рассмотрим, для какой цели он служит в конструкции.
Что такое микроконтроллер?
Микроконтроллер — это устройство на интегральной схеме (ИС), используемое для управления другими частями электронной системы, обычно через микропроцессор (MPU), память и некоторые периферийные устройства.Эти устройства оптимизированы для встроенных приложений, требующих как функциональных возможностей обработки, так и гибкого, отзывчивого взаимодействия с цифровыми, аналоговыми или электромеханическими компонентами.
Наиболее распространенным способом обозначения этой категории интегральных схем является «микроконтроллер», но аббревиатура «MCU» используется взаимозаменяемо, поскольку означает «микроконтроллерный блок». Иногда вы также можете видеть «µC» (где греческая буква mu заменяет «Микро»).
«Микроконтроллер» — удачно выбранное название, потому что оно подчеркивает определяющие характеристики этой категории продуктов.Приставка «микро» подразумевает малость, а термин «контроллер» здесь подразумевает расширенную способность выполнять функции управления. Как указано выше, эта функциональность является результатом объединения цифрового процессора и цифровой памяти с дополнительным оборудованием, которое специально разработано, чтобы помочь микроконтроллеру взаимодействовать с другими компонентами.
Микроконтроллеры и микропроцессоры
Люди иногда используют термин «микропроцессор» или «MPU», когда говорят о микроконтроллере, но эти два устройства не обязательно являются одинаковыми.И микропроцессоры, и микроконтроллеры функционируют как небольшие высокоинтегрированные компьютерные системы, но они могут служить разным целям.
Термин «процессор» используется для обозначения системы, состоящей из центрального процессора и (необязательно) некоторой памяти; Микропроцессор — это устройство, которое реализует все функции процессора в одной интегральной схеме. Для сравнения, микроконтроллеры уделяют больше внимания дополнительным аппаратным модулям, которые позволяют устройству управлять системой, а не просто выполнять инструкции и сохранять данные.
Схема ниже иллюстрирует эту концепцию.
В целом, взаимозаменяемость терминов «микропроцессор» и «микроконтроллер» не является серьезной проблемой, когда мы говорим неформально или когда мы пытаемся избежать повторения одного и того же слова снова и снова. Однако в контексте технического обсуждения важно сохранять различие между этими двумя концепциями.
Микроконтроллеры и цифровые сигнальные процессоры (DSP)
Цифровой сигнальный процессор (или «DSP») — это микропроцессор, который оптимизирован для сложных вычислительных задач, таких как цифровая фильтрация, математический анализ сигналов в реальном времени и сжатие данных.Сложный микроконтроллер может работать как замена цифрового сигнального процессора, но он по-прежнему считается микроконтроллером, если значительная часть его внутренних схем предназначена для управления, мониторинга и связи с окружающей системой.
Элементы микроконтроллера
Микроконтроллер состоит из центрального процессора (ЦП), энергонезависимой памяти, энергозависимой памяти, периферийных устройств и вспомогательных схем.
Центральный процессор
CPU выполняет арифметические операции, управляет потоком данных и генерирует управляющие сигналы в соответствии с последовательностью инструкций, созданной программистом.Чрезвычайно сложная схема, необходимая для работы ЦП, не видна разработчику. Фактически, благодаря интегрированным средам разработки и языкам высокого уровня, таким как C, написание кода для микроконтроллеров часто является довольно простой задачей.
Память
Энергонезависимая память используется для хранения программы микроконтроллера, то есть (часто очень длинного) списка инструкций на машинном языке, которые точно сообщают процессору, что делать. Обычно вы будете видеть слово «Flash» (которое относится к определенной форме энергонезависимого хранения данных) вместо «энергонезависимая память».”
Энергозависимая память (т.е. RAM) используется для временного хранения данных. Эти данные теряются, когда микроконтроллер теряет питание. Внутренние регистры также обеспечивают временное хранение данных, но мы не рассматриваем их как отдельный функциональный блок, поскольку они интегрированы в ЦП.
Периферийные устройства
Мы используем слово «периферийное» для описания аппаратных модулей, которые помогают микроконтроллеру взаимодействовать с внешней системой. В следующих пунктах перечислены различные категории периферийных устройств и приведены примеры.
- преобразователи данных: аналого-цифровой преобразователь, генератор цифро-аналоговый преобразователь, опорного напряжения
- Генерация часов: внутренний генератор , схема кварцевого привода, фазовая автоподстройка частоты
- Время: таймер общего назначения, часы реального времени, счетчик внешних событий, импульсная модуляция
- Обработка аналоговых сигналов: операционный усилитель , аналоговый компаратор
- Вход / выход: схема цифрового входа и выхода общего назначения, параллельный интерфейс памяти
- Последовательная связь: UART, SPI, I2C, USB
Опорная схема
Микроконтроллерывключают в себя множество функциональных блоков, которые нельзя классифицировать как периферийные устройства, поскольку их основная цель не заключается в управлении, мониторинге или взаимодействии с внешними компонентами. Тем не менее, они очень важны — они поддерживают внутреннюю работу устройства, упрощают внедрение и улучшают процесс разработки.
- Схема отладки позволяет разработчику тщательно контролировать микроконтроллер во время выполнения инструкций.Это важный, а иногда и незаменимый метод отслеживания ошибок и оптимизации производительности прошивки.
- Прерывания — чрезвычайно ценный аспект функциональности микроконтроллера. Прерывания генерируются внешними или внутренними аппаратными событиями, и они заставляют процессор немедленно реагировать на эти события, выполняя определенную группу инструкций.
- Модуль тактовой генерации можно рассматривать как периферийное устройство, если он предназначен для выработки сигналов, которые будут использоваться вне микросхемы, но во многих случаях основной целью внутреннего генератора микроконтроллера является обеспечение тактового сигнала для ЦП. и периферийные устройства.Внутренние генераторы часто имеют низкую точность, но в приложениях, допускающих такую низкую точность, они являются удобным и эффективным способом упростить конструкцию и сэкономить место на плате.
- Микроконтроллеры могут включать различные типы схем питания . Интегрированные регуляторы напряжения позволяют генерировать на кристалле требуемые напряжения питания, модули управления питанием могут использоваться для значительного снижения потребления тока устройством в неактивных состояниях, а модули супервизора могут переводить процессор в стабильное состояние сброса, когда напряжение питания отсутствует. Достаточно высокий, чтобы обеспечить надежную работу.
Следующие статьи
В этой статье мы определили микроконтроллер как устройство, которое состоит из небольшого эффективного ядра процессора, объединенного с памятью программ, памятью данных, периферийными устройствами и различными формами схем поддержки и отладки.
В следующей части серии «Введение в микроконтроллеры» мы рассмотрим, как выбрать правильный микроконтроллер. Затем мы перейдем к чтению таблицы данных микроконтроллера.
Если у вас есть какие-либо темы, которые вы хотели бы осветить в будущих статьях, сообщите нам об этом в комментариях ниже.
Микроконтроллер серии
Вы можете перейти к оставшейся части серии «Введение в микроконтроллеры» здесь:
Дополнительные ресурсы
Дополнительные ресурсы о микроконтроллерах см. В других статьях ниже:
(PDF) Микроконтроллеры и современные методы управления
микросхем можно подключить через синхронные последовательные интерфейсы
, называемые SPI, MICROWIRE / PLUS ™ и т. Д.
Максимальная скорость последовательного интерфейса и программное обеспечение
обработки ограничивают максимальную скорость этих запоминающих устройств.
• Операционные системы реального времени и математические библиотеки для
вычислений с числами с плавающей запятой имеют на
более высокие требования к размеру хранилища программ.
Следовательно, внутренняя программная память должна иметь объем
не менее 24 КБ. Большим преимуществом является то, что эта память
относится к типу FLASH, поскольку она значительно сокращает время разработки нового программного обеспечения.
• Для безопасной работы системы управления полезно, если микрокомпьютер
оборудован сторожевой системой
для обнаружения программных сбоев.Надежность
может быть повышена путем контроля напряжения питания
(приложения с питанием от батареи или аккумулятора)
и проверки частоты кварцевого генератора.
• Системы управления с самонастраивающимися регуляторами в основном требуют наличия энергонезависимой памяти EEPROM
, в которой хранятся идентифицированные параметры из регулируемой системы
. В большинстве случаев соответствует
памятиобъемом не менее 128Б. CMOS
Чип SRAM с резервным питанием от батареи может полностью заменить память EEPROM
.
• Системные таймеры с захватом и выходом.
Функция сравнения требуется приложениям с
быстрым изменением логических уровней на цифровых входах и
выходах. Очень полезной может быть аппаратная поддержка широтно-импульсной модуляции
.
2.2 Адаптивное управление
Большинство реальных процессов носит стохастический характер и
их параметры могут считаться постоянными только при
большей или меньшей степени некорректности.Многие факторы
могут вызвать изменение параметров процесса, например,
изменение рабочего режима, различное
качество топлива или сырья или изменение свойств
самой установки, вызванное, например,
старение.
Обычный контроллер имеет жестко заданные параметры
и поэтому не может реагировать на такое изменение
контролируемых параметров процесса. Это приводит к ухудшению качества управления
и, как следствие, к потере энергии
, сокращению срока службы установки и другим
нежелательным эффектам.
Перспективный способ решения этих проблем заключается в
использовании адаптивных систем управления, которые пытаются
копировать поведение живых организмов в природе —
их способность приспосабливаться к изменяющейся
окружающей среде.
Адаптивная система может быть определена как система
, которая измеряет показатели поведения предприятия,
сравнивает их с желаемыми показателями и изменяет
параметры или структуру системы или генерирует вспомогательный сигнал
, чтобы измеренные показатели рядом
желаемых индексов.Индекс поведения может быть для
пример нулей или полюсов передаточной функции,
превышения ступенчатой функции, времени регулирования,
минимальных значений различных интегральных критериев или
частотного спектра.
Классификация адаптивных систем еще не унифицирована
, одна из возможностей —
Эвристические адаптивные контроллеры
Самонастраивающиеся контроллеры (STC)
Образцовые адаптивные системы (MRAS)
Системы с переменной структура
Эвристические адаптивные контроллеры
Эти контроллеры измеряют некоторый эвристический критерий.
Им не нужно идентифицировать управляемую установку, а
часто не требуют тестового сигнала или мониторинга помех
.
Модель эталонных адаптивных систем
Эти системы содержат эталонную модель, которая
предоставляет типовые характеристики. Цель состоит в том, чтобы приблизить
характеристики системы управления к характеристикам
эталонной модели.
Системы с переменной структурой
Структура этих систем изменяется в соответствии с
Данными правилами.Система изменяет свою структуру на
на основе своего опыта, полученного во время предыдущей деятельности
, так что достигаются определенные результаты.
2.3 Самонастраивающиеся контроллеры (STC)
Эти контроллеры основаны на непрерывной оценке
контролируемых характеристик объекта и их постепенном уточнении
. Затем на основе этих знаний предлагается оптимальный контроллер
. Эта процедура позволяет
улавливать изменения в параметрах управляемого объекта
, улучшать процесс регулирования при наличии нарушений
, а также позволяет
автоматически настраивать параметры контроллера.Контроллеры
STC можно разделить на неявные, которые
непосредственно вычисляют параметры контроллера, и
явные, которые сначала вычисляют параметры модели управляемого объекта
, а затем используют их для настройки параметров
контроллера. . В рамках вышеупомянутой библиотеки
мы имели дело с контроллерами STC
.
Принцип самонастройки контроллеров
Для достижения целей управления необходимо
определить параметры данного процесса как можно лучше
.Однако идеальная идентификация предъявляет определенные требования к управляющему сигналу
, и эти требования
отличаются от требований, предъявляемых к управляющему сигналу идеальным управлением
. Когда управление идеальным, практически отсутствует возбуждение управляемого объекта
, и поэтому идентификация
несовершенная. Необходимо найти
2nd WSEAS Int. Conf on COMPUTER ENGINEERING and APPLICATION (CEA’08) Акапулько, Мексика, 25-27 января 2008 г.
Основы микроконтроллеров — структура, приложения, плюсы и минусы
Что такое микроконтроллер?
PS: Этот пост является продолжением поста ВВЕДЕНИЕ В ПИК .
Микроконтроллер — это однокристальный микрокомпьютер, изготовленный на базе СБИС. Микроконтроллер также называется встроенным контроллером, потому что микроконтроллер и его вспомогательные схемы часто встроены или встроены в устройства, которыми они управляют. Доступны микроконтроллеры с разной длиной слова, такие как микропроцессоры (сегодня доступны 4-битные, 8-битные, 16-битные, 32-битные, 64-битные и 128-битные микроконтроллеры).
Микроконтроллер Чип1) Микроконтроллер в основном содержит один или несколько следующих компонентов:
- Центральный процессор (ЦП)
- Оперативная память) (RAM)
- Постоянное запоминающее устройство (ПЗУ)
- Порты ввода / вывода
- Таймеры и счетчики
- Управление прерываниями
- Преобразователи аналогово-цифровые
- Преобразователи аналоговые цифровые
- Порты последовательного интерфейса
- Цепи колебательные
2) Внутренний микроконтроллер состоит из всех функций, необходимых для вычислительной системы, и функционирует как компьютер без добавления в него каких-либо внешних цифровых частей.
3) Большинство контактов в микросхеме микроконтроллера могут быть сделаны программируемыми пользователем.
4) Микроконтроллер имеет множество инструкций обработки битов, которые могут быть легко понятны программисту.
5) Микроконтроллер может обрабатывать логические функции.
6) Более высокая скорость и производительность.
7) Встроенная в микроконтроллер структура ПЗУ обеспечивает лучшую защиту встроенного ПО.
8) Простота проектирования, низкая стоимость и небольшие размеры.
Структура микроконтроллераБазовая структура и структурная схема микроконтроллера показаны на рисунке (1.1).
Структура микроконтроллераИзображение взято из
ЦП— это мозг микроконтроллера. ЦП отвечает за выборку инструкции, ее декодирование и, наконец, выполнение. ЦП объединяет каждую часть микроконтроллера в единую систему. Основная функция ЦП — получение и декодирование инструкций. Команда, полученная из памяти программ, должна быть декодирована ЦП.
Функция памяти в микроконтроллере такая же, как и в микропроцессоре. Он используется для хранения данных и программ. Микроконтроллер обычно имеет определенный объем RAM и ROM (EEPROM, EPROM и т.д.) или флэш-памяти для хранения исходных кодов программ.
- Параллельные порты ввода / вывода
Параллельные порты ввода / вывода в основном используются для подключения различных устройств, таких как ЖК-дисплеи, светодиоды, принтеры, памяти и т. Д., К микроконтроллеру.
Последовательные порты обеспечивают различные последовательные интерфейсы между микроконтроллером и другими периферийными устройствами, такими как параллельные порты.
Это одна из полезных функций микроконтроллера. У микроконтроллера может быть более одного таймера и счетчиков. Таймеры и счетчики обеспечивают все функции отсчета времени и счета внутри микроконтроллера. Основными операциями этого раздела являются функции часов, модуляция, генерация импульсов, измерение частоты, создание колебаний и т. Д.Это также можно использовать для подсчета внешних импульсов.
- Аналого-цифровой преобразователь (АЦП)
АЦП преобразователи используются для преобразования аналогового сигнала в цифровую форму. Входной сигнал в этом преобразователе должен быть в аналоговой форме (например, выход датчика), а выход этого устройства — в цифровой форме. Цифровой выход может использоваться для различных цифровых приложений (например, для измерительных устройств).
- Цифро-аналоговый преобразователь (ЦАП)
ЦАП выполняет операцию обратного преобразования АЦП.ЦАП преобразует цифровой сигнал в аналоговый формат. Обычно используется для управления аналоговыми устройствами, такими как двигатели постоянного тока, различные приводы и т. Д.
Управление прерыванием, используемое для предоставления прерывания (задержки) для рабочей программы. Прерывание может быть внешним (активируется с помощью вывода прерывания) или внутренним (с помощью команды прерывания во время программирования).
- Блок специального функционирования
Некоторые микроконтроллеры используются только для некоторых специальных приложений (например,грамм. космические системы и робототехника) эти контроллеры, содержащие дополнительные порты для выполнения таких специальных операций. Это считается специальным функциональным блоком.
Сравнение микропроцессора и микроконтроллераОсновное сравнение микропроцессора и микроконтроллера, показанное на рис. (1.2)
Сравнение микропроцессора и микроконтроллераИсточник изображения
| Микропроцессоры Микроконтроллеры | ||
| 1 | Это только компьютер общего назначения CPU | Сам микрокомпьютер |
| 2 | Память, порты ввода / вывода, таймеры, прерывания недоступны внутри микросхемы | Все интегрированы внутри микросхемы микроконтроллера |
| 3 | Он должен иметь много дополнительных цифровых компонентов для выполнения своей работы | Может работать как микрокомпьютер без каких-либо дополнительных компонентов. |
| 4 | Системыстановятся громоздче и дороже. | Сделайте систему простой, экономичной и компактной |
| 5 | Не поддерживает логические функции | Обработка логических функций |
| 6 | Требуется больше времени для доступа | Низкое время доступа |
| 7 | Программируется очень мало контактов | Большинство контактов программируются |
| 8 | Очень мало инструкций по обработке битов | Многие инструкции по обработке битов |
| 9 | Широко используется в современных ПК и ноутбуках | широко используется в малых системах управления |
| E.грамм. | INTEL 8086, INTEL Pentium серии | INTEL8051,89960, PIC16F877 |
Приведены основные преимущества микроконтроллеров.
a) Микроконтроллеры действуют как микрокомпьютер без каких-либо цифровых компонентов.
b) Поскольку более высокая степень интеграции внутри микроконтроллера снижает стоимость и размер системы.
c) Использование микроконтроллера просто, легко устраняет неполадки и обслуживает систему.
d) Большинство контактов программируются пользователем для выполнения различных функций.
e) Простое сопряжение с дополнительной RAM, ROM, портами ввода / вывода.
е) Низкое время, необходимое для выполнения операций.
Недостатки микроконтроллерова) Микроконтроллеры имеют более сложную архитектуру, чем микропроцессоры.
б) Выполнять одновременно ограниченное количество выполнений.
c) В основном используется в микрооборудовании.
d) Невозможно напрямую связать устройства большой мощности.
ПриложенияВ наши дни микроконтроллеры можно встретить во всех видах электронных устройств. Любое устройство, которое измеряет, хранит, контролирует, вычисляет или отображает информацию, должно иметь внутри микроконтроллер. Наиболее широко микроконтроллеры используются в автомобильной промышленности (микроконтроллеры широко используются для управления двигателями и регуляторами мощности в автомобилях).Вы также можете найти микроконтроллеры внутри клавиатуры, мыши, модемов, принтеров и других периферийных устройств. В испытательном оборудовании микроконтроллеры позволяют легко добавлять такие функции, как возможность сохранять измерения, создавать и сохранять пользовательские процедуры, а также отображать сообщения и формы сигналов. Потребительские продукты, в которых используются микроконтроллеры, включают цифровые видеокамеры, оптические проигрыватели, ЖК / светодиодные дисплеи и т. Д. И это лишь несколько примеров.
Некоторые основные приложения микроконтроллера приведены ниже.
а) Используется в биомедицинских инструментах.
б) Широко используется в системах связи.
c) Используется как контроллер периферийных устройств в ПК.
г) Используется в робототехнике.
д) Используется в автомобильных областях.
Статей Рекомендуем прочитать:
1. Базовая ПИК
2. ВВЕДЕНИЕ В PIC 167F877
3. PIC 16F877 — АРХИТЕКТУРА И ОРГАНИЗАЦИЯ ПАМЯТИ
4.РЕГИСТРАЦИЯ ОРГАНИЗАЦИИ ПАМЯТИ НА ПИК 16F877
Преимущества, недостатки и их применение
Микроконтроллер представляет собой однокристальную микросхему, обозначаемую с помощью микроконтроллера или микроконтроллера. Технология изготовления, используемая для его контроллера, — СБИС. Альтернативное название микроконтроллера — встроенный контроллер. В настоящее время на рынке существуют различные типы микроконтроллеров, такие как 4-битные, 8-битные, 64-битные и 128-битные. Это сжатый микрокомпьютер, используемый для управления функциями встроенных систем в роботах, офисных машинах, автомобилях, бытовой технике и других электронных устройствах.В микроконтроллере используются различные компоненты: процессор, периферийные устройства и память. Они в основном используются в различных электронных устройствах, которые требуют определенного контроля со стороны оператора устройства. В этой статье обсуждается обзор типов микроконтроллеров и их работы.
Что такое микроконтроллер?
Микроконтроллер — это небольшой, недорогой и автономный компьютер на кристалле, который можно использовать в качестве встроенной системы. Некоторые микроконтроллеры могут использовать четырехбитные выражения и работать с тактовой частотой, которая обычно включает:
- 8- или 16-разрядный микропроцессор.
- Немного ОЗУ.
- Программируемое ПЗУ и флэш-память.
- Параллельный и последовательный ввод-вывод.
- Таймеры и генераторы сигналов.
- Аналого-цифровое и цифро-аналоговое преобразование
Микроконтроллеры обычно должны иметь низкое энергопотребление, поскольку многие устройства, которыми они управляют, работают от батарей. Микроконтроллеры используются во многих устройствах бытовой электроники, автомобильных двигателях, компьютерной периферии, а также в испытательном или измерительном оборудовании. И они хорошо подходят для длительного использования батарей.Преобладающая часть используемых в настоящее время микроконтроллеров имплантируется в другую аппаратуру.
Микроконтроллеры рабочие
Микросхема микроконтроллера — высокоскоростное устройство, но по сравнению с компьютером медленное. Таким образом, каждая инструкция будет выполняться внутри микроконтроллера с высокой скоростью. После включения питания кварцевый генератор будет активирован через логический регистр управления. В течение нескольких секунд, поскольку ранняя подготовка находится в стадии разработки, конденсаторы паразита будут заряжены.
Когда уровень напряжения достигает своего максимального значения, частота генератора переходит в стабильный процесс записи битов через специальные функциональные регистры. Все происходит на основе CLK генератора, и вся электроника начинает работать. Все это занимает крайне мало наносекунд.
Основная функция микроконтроллера заключается в том, что его можно рассматривать как автономные системы, использующие память процессора. Его периферийные устройства можно использовать как микроконтроллер 8051.Когда большинство используемых в настоящее время микроконтроллеров встроены в другие виды оборудования, такие как телефоны, автомобили и периферийные устройства компьютерных систем.
Основы микроконтроллеров Типы
Любое электрическое устройство, используемое для хранения, измерения и отображения информации, иначе меры состоят из микросхемы в нем. В базовую структуру микроконтроллера входят различные компоненты.
ЦП
Микроконтроллер называется устройством ЦП, используется для переноса и декодирования данных и, наконец, эффективного выполнения назначенной задачи.С помощью центрального процессора все компоненты микроконтроллера подключаются к определенной системе. Инструкция, полученная через программируемую память, может быть декодирована через CPU.
Память
В микроконтроллере микросхема памяти работает как микропроцессор, поскольку в ней хранятся все данные, а также программы. Микроконтроллеры разработаны с некоторым объемом RAM / ROM / флэш-памяти для хранения исходного кода программы.
Порты ввода-вывода
В основном, эти порты используются для взаимодействия с другими устройствами, такими как светодиоды, ЖК-дисплеи, принтеры и т. Д.
Последовательные порты
Последовательные порты используются для обеспечения последовательных интерфейсов между микроконтроллером, а также множеством других периферийных устройств, таких как параллельный порт.
Таймеры
Микроконтроллер включает таймеры, в противном случае — счетчики. Они используются для управления всеми операциями отсчета времени и счета в микроконтроллере. Основная функция счетчика — подсчет внешних импульсов, тогда как операции, выполняемые с помощью таймеров, — это функции часов, генерация импульсов, модуляция, измерение частоты, создание колебаний и т. Д.
АЦП (аналого-цифровой преобразователь)
АЦП — это аббревиатура от аналого-цифрового преобразователя. Основная функция АЦП — изменение сигналов с аналоговых на цифровые. Для АЦП требуемые входные сигналы являются аналоговыми, и производство цифрового сигнала используется в различных цифровых приложениях, таких как измерительные устройства
ЦАП (цифро-аналоговый преобразователь)
Аббревиатура DAC — цифро-аналоговый преобразователь, используемый выполнять функции, обратные АЦП.Как правило, это устройство используется для управления аналоговыми устройствами, такими как двигатели постоянного тока и т. Д.
Interpret Control
Этот контроллер используется для управления с задержкой выполняющейся программы, и интерпретация является либо внутренней, либо внешней.
Специальный функциональный блок
Некоторые специальные микроконтроллеры, разработанные для специальных устройств, таких как роботы, космические системы, включают специальный функциональный блок. В этом блоке есть дополнительные порты для выполнения определенных операций.
Как классифицируются типы микроконтроллеров?
Микроконтроллеры характеризуются шириной шины, набором команд и структурой памяти. Для одной и той же семьи могут быть разные формы с разными источниками. В этой статье будут описаны некоторые из основных типов микроконтроллеров, о которых новые пользователи могут не знать.
Типы микроконтроллера показаны на рисунке, они характеризуются своими битами, архитектурой памяти, памятью / устройствами и набором команд.Обсудим это кратко.
Типы микроконтроллеровТипы микроконтроллеров по количеству битов
Биты в микроконтроллере — 8-битные, 16-битные и 32-битные микроконтроллеры.
В 8-битном микроконтроллере точка, когда внутренняя шина 8-битная, тогда АЛУ выполняет арифметические и логические операции. Примерами 8-битных микроконтроллеров являются семейства Intel 8031/8051, PIC1x и Motorola MC68HC11.
16-битный микроконтроллер обеспечивает большую точность и производительность по сравнению с 8-битным.Например, 8-битные микроконтроллеры могут использовать только 8 бит, что дает конечный диапазон от 0 × 00 до 0xFF (0-255) для каждого цикла. Напротив, 16-битные микроконтроллеры с их битовой шириной данных имеют диапазон 0 × 0000 — 0xFFFF (0-65535) для каждого цикла.
Самая большая ценность более длинного таймера, вероятно, может оказаться полезной в определенных приложениях и схемах. Он может автоматически работать с двумя 16-битными числами. Некоторыми примерами 16-битных микроконтроллеров являются 16-битные микроконтроллеры расширенных семейств 8051XA, PIC2x, Intel 8096 и Motorola MC68HC12.
32-разрядный микроконтроллер использует 32-разрядные инструкции для выполнения арифметических и логических операций. Они используются в автоматически управляемых устройствах, включая имплантируемые медицинские устройства, системы управления двигателем, офисную технику, бытовую технику и другие типы встроенных систем. Некоторые примеры: семейство Intel / Atmel 251, PIC3x.
Типы микроконтроллеров в соответствии с устройствами памяти
Устройства памяти делятся на два типа:
- Микроконтроллер встроенной памяти
- Микроконтроллер внешней памяти
Микроконтроллер встроенной памяти : Когда встроенная система имеет блок микроконтроллера, который имеет все функциональные блоки, доступные на микросхеме, называется встроенным микроконтроллером.Например, 8051, имеющий память программ и данных, порты ввода-вывода, последовательную связь, счетчики, таймеры и прерывания на кристалле, является встроенным микроконтроллером.
Микроконтроллер с внешней памятью : Когда встроенная система имеет микроконтроллер, который не имеет всех функциональных блоков, доступных на микросхеме, называется микроконтроллером внешней памяти. Например, 8031 не имеет программной памяти на микросхеме — это внешняя память микроконтроллера.
Типы микроконтроллеров в соответствии с набором команд
CISC : CISC — это компьютер со сложным набором команд.Это позволяет программисту использовать одну инструкцию вместо множества более простых инструкций.
RISC : RISC означает компьютер с сокращенным набором команд, этот тип наборов команд упрощает дизайн микропроцессора для промышленных стандартов. Это позволяет каждой инструкции работать с любым регистром или использовать любой режим адресации и одновременный доступ к программе и данным.
Пример для CISC и RISC