ШИМ контроллеры — справочник по микросхемам для импульсных блоков питания
Наибольшее распространение в источниках питания для бытовой аппаратуры получили импульсные блоки питания с импульсным трансформатором, в которых силовой ключ работает на постоянной частоте повторения импульсов, а длительность самих импульсов изменяется под действием формирователя широтно-импульсной модуляции ШИМ (ШИМ, англ. pulse-width modulation (PWM)).
Определение: широтно-импульсная модуляция — процесс управления мощностью, подводимой к нагрузке, путем изменения скважности импульсов, при постоянной частоте.
Принцип работы импульсных блоков питания на основе широто-импульсной модуляции
Рис. 1. Принцип формирования ШИМ.
Формирование ШИМ осуществляется с помощью порогового элемента ПЭ, на один вход которого подается пилообразное напряжение Uпил а на второй — медленно изменяющееся напряжение Uизм, пропорциональное значению выходного напряжения лока питания Uвых. Изменение наклона пилы или уровня напряжения U
Изменение наклона пилы или уровня напряжения U
В схему управления обычно входят задающий генератор (чаще всего, RC-типа или блокинг-гене-ратор), широтно-импульсный модулятор (ШИМ), цепи запуска, стабилизации (цепи обратных связей) и защиты. Весьма часто, для уменьшения помех на изображении, работу задающего генератора синхронизируют со строчной разверткой, для чего на схему управления поступают строчные импульсы обратного хода (СИОХ).
Рис. 2. Структурная схема импульсного стабилизатора телевизора с ШИМ.
Напряжение с выпрямителя Uвх подается на ключ К, соединенный последовательно с первичной обмоткой импульсного автотрансформатора L1 и эталонным резистором R24. Ключ К открывается в моменты прихода на него импульсов с усилителя У, длительность которых определяет значения напряжений на выходах вторичных выпрямителей В1 и В2. С выхода выпрямителя В2 через измерительную схему ИС напряжение поступает на один — из входов СС; на другой ее вход подается напряжение с источника опорного напряжения (ИОН).
Ключ К открывается в моменты прихода на него импульсов с усилителя У, длительность которых определяет значения напряжений на выходах вторичных выпрямителей В1 и В2. С выхода выпрямителя В2 через измерительную схему ИС напряжение поступает на один — из входов СС; на другой ее вход подается напряжение с источника опорного напряжения (ИОН).
Выходное напряжение ошибки с СС управляет проводимостью генератора тока ГТ, которая определяет длительность импульсов на выходе схемы ШИМ. Период следования импульсов с генератора Г, поступающих на формирователь ШИМ, соответствует периоду следования импульсов строчной развертки телевизора, так как синхронизируется ими по входу «Синхр».
Формирователь Ф улучшает форму прямоугольных импульсов. При возрастании падения напряжения на R24 срабатывает схема защиты СЗ и запрещает проход импульсов на ключ К. При включении телевизора стабилизатор запускается броском тока через резистор R14; в стационарном режиме стабилизатор питается от схемы самоподпитки С.
Схема импульсного блока питания предъявляет высокие требования к значениям предельно допустимых электрических параметров транзистора, используемого в ключевом каскаде. В течение времени tо (рис. 1), когда транзистор открыт, по обмотке импульсного трансформатора протекает пилообразно возрастающий ток. При чрезмерно «широком» отпирающем импульсе («пила» слишком долго нарастает) или при коротком замыкании на выходе блока питания («пила» имеет слишком большую крутизну) транзистор может выйти из строя. С другой стороны, при протекании тока происходит накопление энергии в магнитном поле трансформатора, а при закрывании транзистора возникает ЭДС самоиндукции е, значение которой зависит от питающего каскад напряжения Еп, времени открытого t
Максимальное напряжение, прикладываемое к коллектору транзистора, Uк = Еп (1 + tо/tз.) может оказаться значительным (например, при tо = tз Uк=2Eп). Таким образом, эффективным средством защиты транзистора ключевого каскада от пробоя и от перегрузки по току является соответствующая регулировка соотношения t
Таким образом, эффективным средством защиты транзистора ключевого каскада от пробоя и от перегрузки по току является соответствующая регулировка соотношения t
Для уменьшения наводок от импульсного блока питания диоды выпрямителей шунтируются конденсаторами небольшой емкости; в цепи сглаживающих фильтров включают дроссели, роль которых нередко выполняет кусочек проволоки, продетой в ферритовую трубку; большое внимание уделяется экранированию и заземлению.
С целью получения дополнительных номиналов стабильного выходного напряжения в состав импульсных блоков питания нередко входит маломощный линейный стабилизатор, подключаемый к выходу одного из вторичных выпрямителей. В бестрансформаторных импульсных блоках питания сетевое напряжение подается на выпрямитель через специальный резистор, ограничивающий бросок тока в момент включения телевизора. Специфической особенностью блоков питания, применяемых в цветных телевизорах, является наличие в некоторых из них схемы размагничивания маски и бандажа кинескопа.
В бестрансформаторных импульсных блоках питания сетевое напряжение подается на выпрямитель через специальный резистор, ограничивающий бросок тока в момент включения телевизора. Специфической особенностью блоков питания, применяемых в цветных телевизорах, является наличие в некоторых из них схемы размагничивания маски и бандажа кинескопа.
Смотрите также материалы, где рассматриваются основные принципы работы импульсных блоков питания на основе широто-импульсной модуляции:
Трансформаторные преобразователи с задающими генераторами
Онлайн справочник по микросхемам для импульсных блоков питания
Самый простой способ найти нужную документацию на микросхему для блоков питания, их цоколевку, типовую схему включения — воспользоваться быстропоиском в конце страницы или пролистать справочник и ознакомиться с его содержанием.
Быстропоиск:
Микросхемы: HM9207
| IX1779ce
| KA3842
| KA3882
| M67209
| MA2830
| MA2831
| STK730-080
| STK7348
| STR451
| STR6307
| STR10006
| STR11006
| STR40115
| STR50103
| STR50115
| STR54041
| STR80145
| STRD1816
| STRD6004
| STRD6601
| STR-M6549
| STR-S5941
| TDA4600
| TDA4601
| TDA4601b
| TDA4605
| TDA8380
| TEA1039
| TEA2018
| TEA2019
| TEA2162
| TEA2164
| TEA2260
| TEA2262
| TEA5170
| UAA4600
| UC2842 | UC3842
| UC2844 | UC2845 | UC3844 | UC3845
Что такое ШИМ-контроллер PWM и для чего он нужен
Любой радиолюбитель, начинающий телемастер или электрик рано или поздно столкнётся с такой штукой, как ШИМ-контроллер.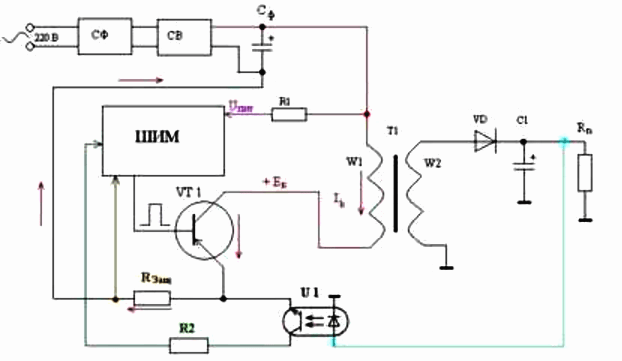 За рубежом он маркируется как PWM. Поэтому сегодня я хочу остановиться на вопросе что такое ШИМ-контроллер, как он работает и для чего нужен. Даже если Вы не планируете заниматься ремонтом электронной техники, всё равно эта статья будет интересна для общего ознакомления.
За рубежом он маркируется как PWM. Поэтому сегодня я хочу остановиться на вопросе что такое ШИМ-контроллер, как он работает и для чего нужен. Даже если Вы не планируете заниматься ремонтом электронной техники, всё равно эта статья будет интересна для общего ознакомления.
Широтно-импульсный модулятор — принцип работы
Аббревиатура ШИМ расшифровывается, как широтно-импульсный модулятор. На английском это будет так — pulse-width modulation или PWM. В теле- и радио-технике ШИМ-контроллеры используются для преобразования напряжения, их можно встетить даже в качестве узлов системы управления скоростью электроприводов в бытовых приборах, меняя скорость электродвигателя. PWM-контроллер есть даже в обычных импульсных блоках питания.
Там постоянное напряжение на входе преобразуется в импульсы прямоугольной формы, которые формируются с определенной частотой и с определённой скважностью. На выходе, с помощью управляющих сигналов, получается регулировать работу целого транзисторного модуля большой мощности.
Главные плюсы ШИМ:
- маленькие габариты; - отличное быстродействие; - высокая надёжность; - низкая стоимость.
В Интернете Вы можете встретить ШИМ-контроллер на Arduino или NE555. Это не совсем контроллер, а скорее уже генератор ШИМ-импульсов, в которых нет возможности подключения цепи обратной связи. Такие устройства подходят больше для регуляторов напряжения, чем для обеспечения стабильного питания приборов, ведь они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Выходы ШИМ-контроллера
Стандартная схема ШИМ-контроллера, который используется в теле-, радио- и иной электронной аппаратуре, характеризуется наличием нескольких выходов.
Общий вывод (GND) — контакт подключается к общему проводу схемы питания контролера. Он соединен с аналогичным контактом схемы подачи питания модуля и контроллирует напряжение на выходе схемы, отключая ее при снижении значения ниже пороговой величины.
Он соединен с аналогичным контактом схемы подачи питания модуля и контроллирует напряжение на выходе схемы, отключая ее при снижении значения ниже пороговой величины.
Вывод питания (VC) — этот вывод ШИМ-контроллера отвечает за энергоснабжение схемы и подключение питания. Как правило, вывод контроля питания и вывод питания располагаются рядом друг с другом. Не перепутайте его с выводом VCC.
Вывод контроля питания (VCC) — следит, чтобы напряжение питания микросхемы было выше определенного значения. Обычно этот контакт соединяют с VC. Если напряжение на этом выводе падает ниже заданного порогового значения для данного PWM-контроллера, то контроллер выключается. Если этого не делать, то при снижении напряжение на выходе схемы, то транзисторы начнут открываться не полностью и будут быстро нагреваться, что приведёт к поломке.
Выход контроллера OUT – это выходное управляющее напряжение, другими словами отсюда подаётся управляющий ШИМ-сигнал для силовых ключей.![]() Тут надо отметить, что микросхемы бывают разные. Например, есть с друмя выходами — двухтактные, которые применяются для управления двухплечевыми каскадами. Да и сам выходной каскад может быть одно- и двухтактным. Тут главное не запутаться!
Тут надо отметить, что микросхемы бывают разные. Например, есть с друмя выходами — двухтактные, которые применяются для управления двухплечевыми каскадами. Да и сам выходной каскад может быть одно- и двухтактным. Тут главное не запутаться!
Вывод VREF — Опорное напряжение. Обеспечивает работу функции формирования стабильно опорного напряжения. Как правило, екомендуется соединять его с общим проводом конденсатором 1 мкФ для повышения качества и стабильности опорного напряжения.
Вывод ILIM — Ограничитель выходного тока. Это сигнал с датчика тока. Если напряжение на этом выводе превышает заданный порог (как правило, это 1 Вольт), то ШИМ-контроллер закрывает силовые ключи. Если же превышается ещё больший порог (обычно 1.5 Вольта), то PWM-контроллер сбрасывает напряжение на ножке мягкого старта и импульсы на выходе прекращаются.
Вывод ILIMREF — задаёт значение ограничения выходного тока на выводе ILIM.
Вывод SS — так называемый «мягкий старт». Напряжение на этом контакте ограничивает максимально возможную ширину импульсов. Сюда ШИМ-контроллер подает ток фиксированной силы.
Напряжение на этом контакте ограничивает максимально возможную ширину импульсов. Сюда ШИМ-контроллер подает ток фиксированной силы.
Вывод RtCt – используется для подключения времязадающей RC-цепи, используемой для определения частоты ШИМ-сигнала.
Вывод RAMP – это ввод сравнения. Рабоает это так. На контакт подаётся пилообразное напряжение. Как только оно превышает значение напряжение на выходе усиления ошибки, вывод OUT появляется отключающий сигнал. Это основа ШИМ-регулирования.
Вывод CLOCK – тактовые импульсы. Используются для синхронизации между собой сразу нескольких ШИМ-контроллеров. В этом случае RC-цепь подключается только к ведущему контроллеру, RT ведомых соединяется с Vref, а CT ведомых соединяюся с общим.
Вывод INV — это инвертирующий вход компаратора. На нём построен усилитель ошибки. Чем больше напряжение на INV, тем длиннее выходные импульсы.
Вывод NONINV – это неинвертирующий вход компаратора. Его обычно подключают к общему проводу — GND.
Его обычно подключают к общему проводу — GND.
Вывод EAOUT — выход усилителя ошибки — Error Amplifier Output. С этого вывода осуществляется частотная коррекция усилителя ошибки, путём подачи сигналов на INV через частотозависимые цепи. Дело в том, что PWM-контроллер достаточно медленно реагирует на воздействие через вход усилителя ошибки и потому схема может сгореть из-за возбуждения. Поэтому и применяется вывод EAOUT.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
Из чего состоит импульсный блок питания часть 3.
 Инвертор блока питания. Из чего состоит инвертор импульсного блока питания Что вообще такое — инвертор.
Инвертор блока питания. Из чего состоит инвертор импульсного блока питания Что вообще такое — инвертор.Данный узел предназначен для преобразования постоянного тока в переменный. В данном случае мы имеем на входе 310 Вольт постоянного тока, которые надо подать на трансформатор. Но так как трансформаторы не хотят работать на постоянном токе, то и нужен инвертор.
Инвертор состоит из двух основных узлов.
ШИМ контроллера.
А также выходных высоковольтных транзисторов. Попутно весьма кстати попал в кадр трансформатор управления этими транзисторами.
Впрочем инвертор может выглядеть заметно проще, например у известного блока питания.
Микросхема, жменька деталей, вот и весь ШИМ контроллер.
В данном случае схемотехника блока питания, а также его мощность заметно отличаются от предыдущего варианта, потому транзистор всего один.
Еще один вариант, слева конденсаторы входного фильтра, справа трансформатор, между ними инвертор.
Так как на силовом транзисторе выделяется значительная мощность, то чаще всего он устанавливается на радиатор.
Но давайте немного отвлечемся на историю, с чего собственно все начиналось. Возможно конечно начиналось не с этого, потому точнее будет сказать, с чего начинал я.
Как вы понимаете, раньше не было ШИМ контроллеров, а иногда и обычную «кренку» купить была проблема, но прогресс не стоял на месте и радиолюбители пытались заменить большие трансформаторы на импульсные блоки питания.
На схеме показан типичный автогенератор, но были схемы и с простой логикой в качестве генератора импульсов.
Тогда схемы подобных блоков питания часто встречались в журнале Радио в контексте усилителей мощности. Но мое знакомство было на примере блока питания для Синклера. Кстати на фото один из них, который я оставил себе на память 🙂
Правда вышеприведенная схема требовала подбора транзисторов и в моем случае сильно перегревалась.
Схема с автогенератором считается самой простой, в данном примере она даже не имеет стабилизации выходного напряжения.
При всем современном разнообразии микросхем показанная выше схема также нашла себя в современном мире, в качестве «электронного трансформатора» для галогенных ламп.
Правда постепенно такие лампы заменяют на светодиоды, но все равно электронные трансформаторы довольно популярны, в основном из-за свой простоты и дешевизны.
Уже через довольно большое время подобные схемы получили второе дыхание. Известная фирма International Rectifier выпустила весьма простую микросхему для электронного балласта люминесцентных ламп. Но выяснилось, что данная микросхема отлично работает в качестве задающей для импульсного БП. К ним относятся микросхемы IR2151, IR2153 и подобные.
Вообще некоторые радиолюбители делали и стабилизированные блоки питания на базе этой микросхемы, но работает это не всегда корректно.
По сути для этой микросхемы надо только несколько мелких деталей и пара полевиков, вот и вся схема инвертора. Именно с применением этой микросхемы я делал первичный блок питания для своего лабораторного.
Кстати, именно эту микросхему я рекомендую для питания усилителей мощности, как неприхотливую и довольно надежную. А также хочу сказать, что нерегулируемые БП лучше себя ведут в плане шумов.
Так выглядит трехканальный блок питания с мощностью в 300 Ватт и ШИМ регулировкой вентилятора. Более полная информация есть в обзоре лабораторника.
Также довольно часто можно встретить и однотактные блоки питания на основе автогенератора. Особенно часто они попадались в АТХ боках в качестве дежурки.
Также они могут попасться и в очень бюджетных зарядных для телефонов. Автогенератор является самым простым типом инвертора.
Хотя бывают и исключения, например блок питания довольно дорогого фирменного кондиционера также имел в своем составе автогенератор, правда сделан довольно качественно и имеет стабилизацию напряжения.
В следующий раз мне попались импульсные блоки питания в новых тогда телевизорах. После больших и тяжелых трансформаторов это был прогресс.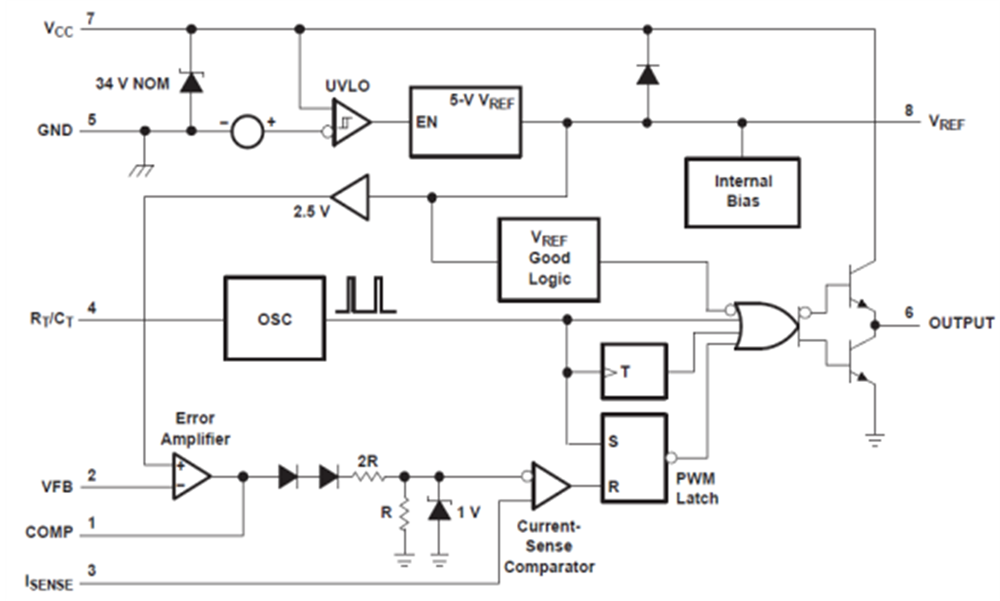
Схемотехника правда была жуткая, ремонтопригодность слабая, да и габарит я не назвал маленьким. На фото блок питания мощностью 80 Ватт.
Сначала они также делались по схеме с автогенератором, но потом начали ставить микросхему, правда особо ничего это не изменило.
Вот и подошли мы к теме более современных инверторов, так как на этом этапе блоки питания вышли на тот схемотехнический уровень, который мы сейчас наблюдаем в современных блоках.
Да, поднимали частоту, расширяли диапазон работы, мощность, но суть осталась той же что и была 30 лет назад. Правда так как тогда интегральные ШИМ контроллеры были слабо развиты, то делали их в виде сборок.
Впрочем и в современных блоках питания не стесняются применять такие вот унифицированные модули, по своему это даже удобно.
Типовая блок схема распространенных моделей инверторов состоит из пяти узлов.
1. Узел контроля напряжения питания, защита от работы при пониженном и повышенном напряжении.
2. Вспомогательное питания или цепь запуска.
3. Силовой элемент и датчик тока. Этот узел может заметно отличаться в зависимости от топологии блока питания.
4. Собственно ШИМ контроллер, мозги блока питания.
5. Узел основного питания ШИМ контроллера.
Рассмотрим как происходит запуск большинства блоков питания, эта информация может помочь в поиске неисправностей.
После того как подали высокое напряжение, оно через резистор попадает в цепь питания ШИМ контроллера.
Как только напряжение достигнет порога включения ШИМ контроллер запускается, питаясь в это время от конденсатора в цепи питания.
Если ваш блок питания не подает признаков жизни, проверьте, есть ли питание на входе ШИМ контроллера, иногда эти резисторы уходят в обрыв.
Затем ШИМ контроллер проверяет, в порядке ли питающее напряжение. Эта цепь есть далеко не у всех инверторов, потому если ее нет, то можно сразу перейти к следующему шагу.
Если с питанием все отлично, то контроллер начинает выдавать управляющие импульсы силовому транзистору. попутно при этом контролируется ток в цепи этого транзистора и если он превышен, то ШИМ контроллер переходит в режим защиты.
попутно при этом контролируется ток в цепи этого транзистора и если он превышен, то ШИМ контроллер переходит в режим защиты.
Если все нормально, то буквально после нескольких тактов на выходе цепи основного питания появляется рабочее напряжение, которое и питает контроллер. Кстати это один из узлов отказа, если питания нет, то блок питания будет работать в старт-стоп режиме.
Если все этапы запуска прошли корректно, то дальше вступает в дело ШИМ стабилизация. В данном случае я всегда сравниваю ее с бочкой, в которую мы порциями подаем воду и сливая ее через другой кран с разным напором. Задача контроллера поддерживать всегда один и тот же уровень воды в бочке при том, что вводной кран может быть только в двух состояниях, открыто и закрыто.
Кстати, многие видели на выходе блоков питания резистор, подключенный параллельно питанию, он нужен чтобы обеспечить некую минимальную нагрузку, так как блоку питания тяжело работать при очень малой ширине импульса.
Для примера ширина импульсов при небольшой нагрузке.
Если увеличить нагрузку, то ШИМ контроллер увеличит подачу энергии в трансформатор, а через него в нагрузку.
Даже если к примеру нагрузить блок питания на полную, то ширина импульсов не будет полной.
Запас необходим для компенсации снижения входного напряжения.
Если снизить входное напряжение еще больше, то ШИМ контроллер просто выставит максимальную ширину импульса. Кстати, ШИМ контроллеры блоков питания не формируют 100% заполнение, так как всегда необходимо «мертвое» время для защиты выходных транзисторов. В это время выходные транзисторы закрыты.
Для обратноходовых однотактных блоков питания, а именно они используются в качестве блоков питания небольшой мощности, максимальное заполнение составляет 50%.
Самым первым ШИМ контроллером, с которым я познакомился, была легендарная TL494. Микросхема очень старая, но так получилось, что у разработчика дешевый и очень универсальный контроллер и даже спустя много лет и при наличии современных решений он еще весьма широко применяется в блоках питания.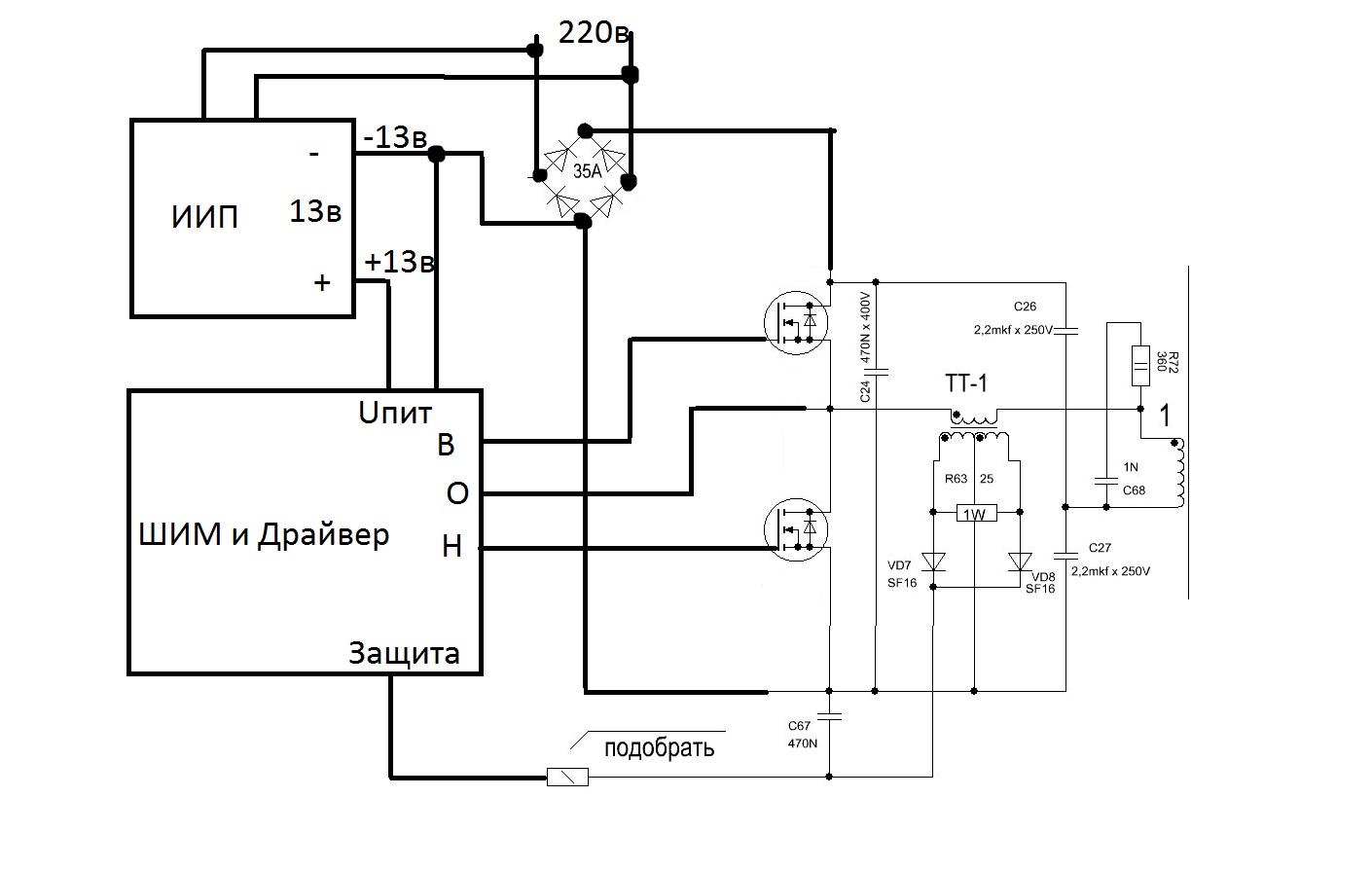
Выпускается она многими фирмами и иногда под разными названиями, например аналог от Самсунга называется КА7500.
На первый взгляд его внутреннее устройство может показаться довольно сложным, но на самом деле таковым не является.
Если немного упростить картинку, то будет примерно так:
1 и 2, стабилизатор питания и источник опорного напряжения.
3. Генератор импульсов, задает частоту работы контроллера.
4. Два компаратора, один обычно используется для стабилизации тока, второй — напряжения.
5. Задатчик мертвого времени, т.е. минимальной паузы между открытым состоянием выходов.
6. Узел сложения всех сигналов.
7. Триггер, который управляет выходными ключами и задает логику работы, двухтактный или однотактный режим. В некоторых аналогах этот триггер сбоил на частотах ниже 100 Гц, чем доставлял немало сюрпризов строителям повышающих инверторов в 220 Вольт.
Микросхема выполнена в корпусе с 16 выводами. Сама по себе надежна, но иногда в блоках питания АТХ, где ее питание идет от источника дежурного напряжения, выходит из строя после его ухода в разнос, когда высыхал конденсатор по выходу 5 Вольт. Пробивало стабилизатор опорного напряжения и на выходе БП запросто могло появиться высокое напряжение. Потому при проверке прежде всего смотреть наличие 5 Вольт на выводе 14.
Пробивало стабилизатор опорного напряжения и на выходе БП запросто могло появиться высокое напряжение. Потому при проверке прежде всего смотреть наличие 5 Вольт на выводе 14.
В блоках питания АТ, а потом в распространенных китайских БП в кожухе она питается от своего же силового трансформатора. Запуск происходит за счет резисторов в базовых цепях силовых ключей. При включении они сначала входят в автогенераторный режим, на выходе трансформатора появляется небольшое напряжение, микросхема начинает работать и перехватывает управление на себя. Потому если БП не запускается, то в первую очередь проверяем резисторы выделенные на схеме резисторы.
Вторым, не менее легендарным ШИМ контроллером является семейство однотактных UC384х.
Думаю что вы могли из встречать раньше в блоках питания и преобразователях напряжения.
Внутреннее устройство весьма похоже на TL494, но немного отличается. Для начала у микросхемы только один выход, а не два.
Кроме того компараторы привязаны к определенному напряжению, заданному внутри микросхемы, а не универсальные.
Ну и конечно ключевая особенность, микротоковый старт. пока микросхема не начнет работать, он потребляет очень маленький ток, потому запустить ее можно прямо от входного напряжения через резистор, TL494 так не умеет.
Чтобы запуск проходил корректно, у микросхемы есть пороговая схема определяющая напряжение включения и выключения микросхемы. Существует два варианта, около 9 и 15 Вольт.
Кроме того микросхема может иметь 50 и 100% рабочий цикл, первая идет в блоки питания, вторая в преобразователи напряжения.
Так получается четыре варианта исполнения этого контроллера.
Микросхема выпускается в разных корпусах, но наиболее распространен корпус с восемью выводами.
Типовая схема блока питания с этой микросхемой выглядит примерно так.
Сейчас на рынке есть много блоков питания с другими микросхемами, но если посмотреть на их схему, то вы увидите очень много общего, все те же узлы и элементы. Отличия если и есть, то они минимальны.
Инверторы блоков питания могут иметь разную топологию, и об этом я обязательно расскажу отдельно, но большинство выполнено по схемотехнике флайбек или полумост, две верхние схемы на чертеже. Собственно все описанные сегодня блоки питания работают именно так.
Собственно все описанные сегодня блоки питания работают именно так.
Но вернемся к ШИМ контроллерам. Перед этим я описывал варианты, когда ШИМ контроллер отдельно, а силовой узел отдельно. но также получили распространение и полностью интегрированные контроллеры, например серии TOP от Power integrations где практически все собрано в одном корпусе.
Не так давно мне даже попалась подделка, причем что интересно, она слева, с лазерной маркировкой, справа оригинал.
Распространение они получили благодаря простейшей схемотехнике, где в простом варианте блок питания состоит буквально из нескольких деталей.
Потом появились более продвинутые контроллеры, где можно задавать напряжение включения и отключения, а также ограничение выходной мощности. Но при желании их можно перевести в трехвыводный режим, соединив выводы как было на фото раньше.
Но в любом случае данные контроллеры гораздо умнее и имеют комплекс защит от разных проблем, например они выдерживали напряжение более 300 Вольт по входу просто блокируя свою работу.
Но секрет их популярности был также и в удобной программе расчета, которую предоставлял производитель. Она позволяла рассчитать все, вплоть до укладки обмоток трансформатора. А при обнаружении проблем в расчетах, выдавала подсказки.
Производитель предоставлял варианты применения своих микросхем в виде примеров. Был даже вариант компьютерного блока питания, но как-то не пошло.
Зато в небольших блоках питания, например мониторов, он встречаются весьма часто.
Кроме того я и сам их очень активно использую уже наверное лет 15.
Китайские производители также не отстают, выпуская свои варианты подобных микросхем.
Которые довольно успешно применяют в небольших блоках питания
Кстати, при желании можно использовать ШИМ контроллеры и без обратной связи от выходного напряжения, используя обмотку питания самого контроллера. Схема упрощается, но стабильность конечно будет немного ниже чем при правильной обратной связи.
В общих чертах на этом все. Вообще мне иногда кажется, что чем больше я рассказываю, тем больше остается за кадром, что еще хотелось бы рассказать более подробно, но не успеваешь. Потому скорее всего будут еще выпуски по отдельным узлам и принципам работы.
Видео получилось слишком длинным, даже сам не ожидал, и это при том, что еще почти ничего не сказал за ключевые транзисторы и часть даже вырезал, наверное болтаю слишком много 🙁
Несколько ссылок, на полезные обзоры, которые упоминались в видео.
Неплохой модуль DC-DC ZXY6005S или лабораторный блок питания своими руками
12 Вольт 6-8 Ампер блок питания, который приятно удивил
12 Вольт 5 Ампер блок питания или как это могло быть сделано
DC-DC преобразователь, как это иногда бывает
S-180-12 180W 12V / 15A блок питания в непривычном формфакторе
36 Вольт 10 Ампер 360 Ватт или продолжаем изучать как устроены блоки питания + небольшой бонус
48 Вольт, 5 Ампер и 240 Ватт или блок питания который смог удивить
Блоки питания, маленькие и очень маленькие
Все про широтно-импульсную модуляцию (ШИМ)
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Контроллер заряда АКБ с использованием технологии ШИМ (PWM)
Контроллер заряда является неотъемлемой частью любой солнечной электростанции. Нам часто задают вопрос: «Можно ли подсоединить солнечную батарею напрямую к АКБ?», ответ однозначно НЕТ! Все дело в том, что АКБ любого типа расчитана на определенный алгоритм заряда.
Соединение солнечных батарей напрямую к АКБ приведет к её перезаряду и закипанию электролита.
Таким образом основной задачей контроллера заряда, является управление зарядом АКБ с использованием мощности вырабатываемой солнечными батареями.
На сегодняшний день, в основном, используются два типа контроллеров ШИМ (PWM) и MPPT контроллеры. В ШИМ (PWM — англ. pulse-width modulation) контроллерах, используется технология широтно-импульсной модуляции для заряда АКБ на завершающей стадии. Это позволяет зарядить АКБ полностью.
Несмотря на то, что ШИМ контроллеры прекрасно справляются с задачей корректного заряда АКБ, их использование рационально в системах небольшой мощностью или регионах с высокой солнечной активностью. Для крупных солнечных станций используют MPPT контроллеры, т.к. их эффективность значительно выше.
ШИМ контроллеры различаются:
- по напряжению системы. Контроллеры выпускаются для работы с системами 12, 24 и 48 В. Многие контроллеры расчитаны на работу в различных системах — при подключении АКБ произойдет автоматическое определение напряжения системы.
- по току заряда.
- наличию дисплея
- наличию USB выходов
- способу управления сенсорные/кнопочные
- наличию дополнительных функций
Как выбрать ШИМ контроллер?
Для правильного выбора контроллера нужно учитывать следующие параметры:
- Ток заряда АКБ. При выборе контроллера, нужно учитывать, что оптимальный ток заряда свинцово-кислотных АКБ составляет 0,1С (т.е. 10% от емкости батареи), превышение этого значения может привести к закипанию электролита и как следствие, к снижению ресурса или полному выходу из строя АКБ.
- Входное напряжение. Для каждого контроллера, производителем указано максимальное входное напряжение. Напряжение холостого хода солнечной батареи или сумма напряжений холостого хода последовательно подключенных батарей не должно превышать это значение. При выборе контроллера, обязательно, необходимо учитывать, что в яркую, солнечную погоду значение напряжения холостого хода солнечной батареи может превысить указанное в технических характеристиках.
- Мощность СБ. Суммарная мощность солнечных батарей подключаемых к контроллеру, должна соответствовать его техническим характеристикам, указанным производителем.
Самые популярные ШИМ контроллеры:
Контроллер заряда
Epsolar LS2024EU
Uном = 12/24В
Uном = 20А
Umax = вход 50В
Контроллер заряда
Epsolar VS1024A
Uном = 12/24В
Uном = 10А
Umax = вход 50В
Контроллер заряда
DELTA PWM 2430
Uном = 12/24В
Uном = 20А
Umax = вход 30В
Контроллер заряда
Epsolar LS2024B
Uном = 12/24В
Uном = 20А
Umax = вход 30В
Сообщения не найдены
Написать отзывРегуляторы напряжения — схема ШИМ
Вид архитектуры
Harvard 8бит
Вид памяти
Flash
Время нарастания импульса
15нс 30нс
Время падения импульса
15нс 20нс 75нс
Входное напряжение
-0.3…6.3В 10…20В 10…450В 3…25В 3.6…20В 8…14.5В
Выходное напряжение
-0.3…15.3В 0…20В 0.2…5.6В 0.6/5.5В DC 0.8…20В 13.5В 30В 5.4В 5В
Выходной ток
100мА 1А 200мА 2А 500мА 50мА
Интерфейс
I2C
Кол-во входов/выходов
11 9
Кол-во каналов
1 2
Кол-во таймеров 16 бит
1
Кол-во таймеров 8 бит
2
Корпус
DFN10 DIP16 DIP18 DIP8 QFN24 SO14 SO16 SO8 SSOP16
Максимальное напряжение
18В 5В 800В
Монтаж
SMD THT
Напряжение питания
0…30В DC 8…35В DC 8…40В DC 8.2…30В DC 9…13.5В DC
Объем Flash-памяти
4кБ
Объем памяти SRAM
256Б
Рабочая температура
-40…125°C -55…125°C
Рабочее напряжение
4.5…30В 4.5…32В 4.5…42В
Технология
MOSFET
Тип микросхемы
driver PWM controller PWM controller, buck, high side, low side PWM controller, SEPIC, cuk, flyback, low side, step up step down step up преобразователь DC/DC стабилизатор напряжения ШИМ-контроллер
Тип стабилизатора напряжения
регулируемый
Ток выхода макс.
1А 4А
Ток питания DC
1.3мА
Частота
0.03125-2МГц 0.1-1.6МГц 0.1-500кГц 115кГц 1МГц 30-300кГц 300кГц 47кГц 500кГц
Частота макс.
1Гц 1МГц
Производитель
DIODES INCORPORATED INFINEON TECHNOLOGIES LINEAR TECHNOLOGY MICROCHIP (SUPERTEX) MICROCHIP TECHNOLOGY MICROSEMI ON SEMICONDUCTOR ST MICROELECTRONICS TEXAS INSTRUMENTS
Фильтровать
ШИМ-РЕГУЛЯТОР ДЛЯ ЭЛЕКТРОВЕЛОСИПЕДА
Данный модуль предназначен для установки в электровелосипеды — в качестве блока управления электрическим приводом. Он работает с двигателем постоянного тока и аккумуляторной батареей на 15 — 95 В (любая в указанном диапазоне соответствующая двигателю).
Контроллер является элементом, необходимым для управления скоростью двигателя. Он ограничивает количество энергии идущей на двигатель, чтобы контролировать его скорость вращения. К сожалению, большинство доступных на рынке контроллеров не могут работать при таком высоком напряжении (либо ограничение по мощности). Поэтому решено было спроектировать и построить свой собственный ШИМ-контроллер, который мог бы работать с двигателем более высокого напряжения и тока.
Поскольку нужно контролировать скорость вращения двигателя постоянного тока, можем использовать две технологии:
- понижающий преобразователь который уменьшит напряжение, подаваемое на обмотку двигателя,
- ШИМ-управление (широтно-импульсная модуляция).
Конструкция инвертора довольно сложна, поэтому применим ШИМ. Этот метод относительно прост, может с высокой частотой контролировать скорость, с которой аккумулятор подключается и отключается от двигателя. Для изменения скорости изменяется время переключения между нагрузкой (двигателем) и АКБ.
Принципиальная схема мощного ШИМ регулятора
Переключение напряжения не может быть реализовано с помощью механического переключателя — ни один из них не выдержит такие большие и постоянные нагрузки, поэтому правильный выбор для таких схем — транзистор полевой MOSFET с N-каналом. Необходимо выбрать подходящую модель для этих требований — частота переключения, напряжение и ток.
Для управления транзисторами в схеме необходим сигнал ШИМ. Сгенерируем его используя классическую микросхему 555. Это простой универсальный таймер, который позволяет создавать множество устройств, в том числе управляемый генератор сигналов ШИМ. В такой схеме частота переключения постоянна, а изменение положения потенциометра изменяет скважность.
М/с NE555 может питаться постоянным напряжением до 15 В. Она не может питаться непосредственно от аккумулятора электровелосипеда. Именно поэтому добавлен модуль импульсного питания на основе интегральной микросхемы LM5008. Это понижающий преобразователь, который снижает напряжение с 80 В до 10 В, используемых для питания таймера 555 и охлаждающих вентиляторов.
Из-за высокого тока протекающего в схеме, использовались 4 транзистора MOSFET IRFPC60LC, соединенных параллельно. Каждый элемент может работать с напряжением Vds до 600 В и током стока до 16 А. Объединенные четыре таких транзистора позволяет достичь 64 А тока контроллера, что при напряжении питания 80 В дает более 5 кВт — намного больше, чем необходимо для управления двигателем в данном электровелосипеде.
Печатная плата ШИМ-регулятора
Разработка отдельной печатной платы поможет не только компактно объединить все элементы, но также позволит использовать этот готовый ШИМ-модуль в других проектах — и не только с двигателями постоянного тока, ШИМ-модуляция идеально подходит, например, для управления нагревателями.
Идея проектирования печатной платы может показаться сложной, но стоит иметь свои собственные печатные платы. Имея это в виду, автор спроектировал печатную плату для модуля регулятора скорости.
При проектировании печатной платы самое важное, что нужно помнить, это обеспечить правильную ширину токовых путей. Высокий ток, который должен проходить через транзисторы к двигателю, также будет проходить через фольгу платы и нагревать её.
На печатной плате добавлены монтажные отверстия, которые облегчат установку модуля в готовый электробайк, а также место для установки радиатора и вентилятора, который будет охлаждать работающие транзисторы.
Чтобы облегчить сборку нужно начать с самых маленьких элементов на печатной плате: в нашем случае это преобразователь LM5008 и компоненты SMD. После пайки дискретных компонентов инвертора LM5008 можем припаять большую катушку по источнику питания и начать пайку более крупных компонентов. В конце установить таймер 555, а затем силовые транзисторы.
При таком огромном количестве энергии, с которым имеет дело создаваемый контроллер, будет выделяться много тепла. Полевые транзисторы будут в основном нагреваться, поэтому надо обеспечить их достаточным охлаждением. Это делается с помощью радиатора с вентилятором.
После установки радиатора схема готова к настройке и дальнейшей работе.
Тестирование ШИМ контроллера
Для тестирования контроллера будем использовать набор ячеек литиевых батарей с номинальным напряжением 80 В, которые применяются для данного электрического велосипеда. Контроллер временно подключен к аккумулятору и мотору, который прикреплен к велосипеду, чтобы приводить в движение заднее колесо. Поворачивая потенциометр по часовой стрелке, двигатель должен начать вращаться постепенно и увеличивать скорость, пропорциональную вращению ручки.
Чтобы проверить регулятор скорости на реальной нагрузке, надо смонтировать все на своем месте. Посмотреть как он держит нагрузку, вес, долгое время работы и воздействие атмосферной влажности (лучше покрыть плату лаком).
3 Объяснение простых схем контроллера скорости двигателя постоянного тока
Схема, которая позволяет пользователю линейно управлять скоростью подключенного двигателя, вращая присоединенный потенциометр, называется схемой контроллера скорости двигателя.
Здесь представлены 3 простых в сборке схемы регулятора скорости для двигателей постоянного тока: одна с использованием полевого МОП-транзистора IRF540, вторая с использованием IC 555 и третья концепция с IC 556 с обработкой крутящего момента.
Дизайн № 1: Контроллер скорости двигателя постоянного тока на основе Mosfet
Очень крутая и простая схема контроллера скорости двигателя постоянного тока может быть построена с использованием всего одного МОП-транзистора, резистора и потенциометра, как показано ниже:
Использование Эмиттерный повторитель BJT
Как видно, mosfet настроен как повторитель источника или общий режим стока, чтобы узнать больше об этой конфигурации, вы можете обратиться к этому сообщению, в котором обсуждается версия BJT, тем не менее принцип работы остается тем же .
В приведенной выше конструкции контроллера двигателя постоянного тока регулировка потенциометра создает изменяющуюся разность потенциалов на затворе МОП-транзистора, а вывод истока МОП-транзистора просто следует за значением этой разности потенциалов и соответственно регулирует напряжение на двигателе.
Это означает, что источник всегда будет на 4 или 5 В отстать от напряжения затвора и будет меняться вверх / вниз с этой разницей, представляя переменное напряжение на двигателе от 2 до 7 В.
Когда напряжение затвора составляет около 7 В, вывод источника будет подавать минимум 2 В на двигатель, вызывая очень медленное вращение двигателя, и 7 В будет доступно на выводе источника, когда регулировка потенциометра генерирует полное напряжение 12 В на затворе. МОП-транзистора.
Здесь мы можем ясно видеть, что вывод истока mosfet, кажется, «следует» за затвором и, следовательно, за повторителем источника имени.
Это происходит из-за того, что разница между затвором и истоком МОП-транзистора всегда должна быть около 5В, чтобы МОП-транзистор работал оптимально.
В любом случае, вышеуказанная конфигурация помогает обеспечить плавное регулирование скорости двигателя, и конструкция может быть построена довольно дешево.
BJT может также использоваться вместо MOSFET, и фактически BJT будет обеспечивать более высокий диапазон регулирования от 1 В до 12 В на двигателе.
Видео-демонстрация
Когда дело доходит до управления скоростью двигателя равномерно и эффективно, контроллер на основе ШИМ становится идеальным вариантом, здесь мы узнаем больше о простой схеме для реализации этой операции.
Использование полевого МОП-транзистора в качестве потенциометра высокой мощности
На следующем рисунке ниже показана очень простая схема контроллера скорости двигателя постоянного тока, в которой полевой МОП-транзистор используется в качестве мощного потенциометра (реостата).Схема предназначена для работы с двигателями постоянного тока на 12 В, имеющими пиковый ток ниже 5 А.
Питание переменного тока от сети подается через двухпозиционный переключатель S1 на первичную обмотку развязывающего и понижающего трансформатора T1. Двухтактная схема выпрямителя D1 и D2 в двухполупериодном режиме выпрямляет выходной сигнал T1, и результирующий нефильтрованный выходной сигнал постоянного тока сглаживается до определенной степени с помощью C1 для создания относительно постоянного потенциала постоянного тока.
На этом выходе постоянного тока может быть значительный уровень пульсаций, однако в данном приложении это неважно.Tr1 обеспечивает питание нагрузки и смещается через резистивный делитель, состоящий из R1, VR1 и R2.
Напряжение смещения затвора, подаваемое на Tr1, может быть недостаточным, чтобы позволить полевому МОП-транзистору значимо вести себя со скребком VR1 на конце его вращения R2, и двигатель не будет работать. Перемещение грязесъемника VR1 к противоположному концу его вращения позволяет постоянно увеличивать смещение, подаваемое на Tr1, что приводит к неуклонно уменьшающемуся сопротивлению стока к истоку.
Из-за этого мощность, подаваемая на двигатель, увеличивается вместе со скоростью двигателя, пока Tr1 не достигнет насыщения (когда двигатель работает на полной скорости). Таким образом, VR1 можно использовать для изменения скорости двигателя с минимальной на максимальную.
C2 отфильтровывает любые сетевые гудения или другие электрические шумы, которые в противном случае могли бы быть уловлены высокоомной схемой затвора Tr1, предотвращая снижение скорости двигателя до нуля. D3 — это предохранительный диод, который предотвращает любые чрезмерные всплески обратного напряжения, которые могут возникнуть в результате чрезмерно индуктивной нагрузки двигателя.
Дизайн № 2: ШИМ-управление двигателем постоянного тока с помощью IC 555
Конструкцию простого контроллера скорости двигателя, использующего ШИМ, можно понять следующим образом:
Первоначально, когда схема запитана, контакт триггера находится в низком логическом положении, поскольку конденсатор С1 не заряжается.
Вышеупомянутые условия инициируют цикл колебаний, переводя выходной сигнал на высокий логический уровень.
Из-за высокого выходного сигнала конденсатор теперь заряжается через D2.
При достижении уровня напряжения, составляющего 2/3 напряжения питания, вывод 6, который является порогом срабатывания триггера IC.
Момент срабатывает на контакте №6, на контактах №3 и №7 устанавливается низкий логический уровень.
При низком уровне на выводе №3 C1 снова начинает разряжаться через D1, и когда напряжение на C1 падает ниже уровня, составляющего 1/3 напряжения питания, выводы №3 и №7 снова становятся высокими, вызывая цикл. следовать и повторять.
Интересно отметить, что C1 имеет два дискретно установленных пути для процесса зарядки и разрядки через диоды D1, D2 и через резистивные плечи, устанавливаемые потенциометром, соответственно.
Это означает, что сумма сопротивлений, с которыми сталкивается C1 во время зарядки и разрядки, остается неизменной независимо от того, как установлен потенциометр, поэтому длина волны выходного импульса всегда остается неизменной.
Однако, поскольку периоды времени зарядки или разрядки зависят от значения сопротивления, встречающегося на их пути, горшок дискретно устанавливает эти периоды времени в соответствии с его настройками.
Поскольку периоды времени заряда и разряда напрямую связаны с рабочим циклом выхода, они меняются в зависимости от настройки потенциометра, давая форму предполагаемым изменяющимся импульсам ШИМ на выходе.
Средний результат отношения метка / пространство дает выход ШИМ, который, в свою очередь, управляет скоростью двигателя постоянного тока.
Импульсы ШИМ подаются на затвор МОП-транзистора, который реагирует и регулирует ток подключенного двигателя в ответ на настройку потенциометра.
Уровень тока двигателя определяет его скорость и, таким образом, реализует управляющий эффект через потенциометр.
Частоту на выходе ИС можно рассчитать по формуле:
F = 1.44 (VR1 * C1)
МОП-транзистор можно выбрать в соответствии с требованиями или током нагрузки.
Принципиальная схема предлагаемого регулятора скорости двигателя постоянного тока представлена ниже:
Прототип:
Тестирование видео:
В приведенном выше видеоролике мы можем увидеть, как IC 555 основан на конструкция используется для управления скоростью двигателя постоянного тока. Как вы можете видеть, хотя лампочка отлично реагирует на ШИМ и меняет свою интенсивность от минимального свечения до максимально слабого, двигатель этого не делает.
Двигатель изначально не реагирует на узкие ШИМ, а запускается рывком после того, как ШИМ настроены на значительно более высокие значения длительности импульса.
Это не означает, что в цепи есть проблемы, это потому, что якорь двигателя постоянного тока плотно зажат между парой магнитов. Чтобы инициировать запуск, якорь должен совершить скачок своего вращения через два полюса магнита, что не может произойти при медленном и плавном движении. Он должен начинаться с укола.
Именно поэтому двигатель изначально требует более высокой настройки ШИМ, и как только начинается вращение, якорь получает некоторую кинетическую энергию, и теперь достижение более низкой скорости становится возможным с помощью более узких ШИМ.
Тем не менее, перевод в состояние «еле-еле медленно» может оказаться невозможным по той же причине, что и объяснено выше.
Я изо всех сил старался улучшить отклик и добиться максимально медленного ШИМ-управления, сделав несколько модификаций на первой диаграмме, как показано ниже:
Сказав это, двигатель мог бы показать лучшее управление на более медленных уровнях, если бы двигатель прикреплен или обвязан грузом через шестерни или систему шкивов.
Это может произойти из-за того, что нагрузка действует как демпфер и помогает обеспечить контролируемое движение во время регулировки более низкой скорости.
Дизайн № 3: Использование IC 556 для улучшенного управления скоростью
Изменение скорости двигателя постоянного тока может показаться не таким сложным, и вы можете найти множество схем для этого.
Однако эти схемы не гарантируют постоянных уровней крутящего момента при более низких скоростях двигателя, что делает их работу весьма неэффективной.
Кроме того, на очень низких скоростях из-за недостаточного крутящего момента двигатель имеет тенденцию останавливаться.
Еще одним серьезным недостатком является то, что в этих схемах нет функции реверсирования двигателя.
Предлагаемая схема полностью лишена вышеуказанных недостатков и способна создавать и поддерживать высокие уровни крутящего момента даже при минимально возможных скоростях.
Работа схемы
Прежде чем обсуждать предложенную схему контроллера двигателя с ШИМ, мы также хотели бы изучить более простую альтернативу, которая не так эффективна. Тем не менее, его можно считать достаточно хорошим, если нагрузка на двигатель невелика, и пока скорость не снижена до минимального уровня.
На рисунке показано, как одну микросхему 556 IC можно использовать для управления скоростью подключенного двигателя, мы не будем вдаваться в подробности, единственным заметным недостатком этой конфигурации является то, что крутящий момент прямо пропорционален скорости двигателя. .
Возвращаясь к предлагаемой конструкции схемы контроллера скорости с высоким крутящим моментом, здесь мы использовали две микросхемы 555 вместо одной или, скорее, одну микросхему 556, которая содержит две микросхемы 555 в одном корпусе.
Принципиальная схема
Основные характеристики
Вкратце предлагаемый контроллер двигателя постоянного тока включает следующие интересные особенности:
Скорость можно плавно изменять от нуля до максимума, без остановки.
На крутящий момент никогда не влияют уровни скорости и он остается постоянным даже при минимальных уровнях скорости.
Вращение двигателя можно изменить или изменить за доли секунды.
Скорость регулируется в обоих направлениях вращения двигателя.
Двум микросхемам 555 назначены две отдельные функции. Одна секция сконфигурирована как нестабильный мультивибратор, генерирующий такты прямоугольной волны 100 Гц, которые подаются на предыдущую секцию 555 внутри корпуса.
Вышеупомянутая частота отвечает за определение частоты ШИМ.
Транзистор BC 557 используется в качестве источника постоянного тока, который поддерживает заряженным соседний конденсатор на его плече коллектора.
При этом на вышеуказанном конденсаторе создается пилообразное напряжение, которое сравнивается внутри микросхемы 556 IC с напряжением образца, приложенным извне по показанной схеме контактов.
Напряжение выборки, прикладываемое извне, может быть получено с помощью простой схемы источника питания с переменным напряжением 0–12 В.
Это изменяющееся напряжение, подаваемое на микросхему 556 IC, используется для изменения ШИМ импульсов на выходе и, в конечном итоге, используется для регулирования скорости подключенного двигателя.
Переключатель S1 используется для мгновенного изменения направления вращения двигателя, когда это необходимо.
Список деталей
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 Ом,
- R7, R8, R9, R10 = 470 Ом,
- C1 = 0,1 мкФ,
- C2, C3 = 0,01 мкФ,
- C4 = 1 мкФ / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC5472, D 9017 — D4 = 1N5408,
- Z1 = 4V7 400 мВт
- IC1 = 556,
- S1 = тумблер SPDT
Приведенная выше схема была вдохновлена следующей схемой драйвера двигателя, которая давно была опубликована в журнале Elecktor Electronic India.
Управление крутящим моментом двигателя с помощью IC 555
Первую схему управления двигателем можно значительно упростить, используя переключатель DPDT для реверсирования двигателя и транзистор эмиттерного повторителя для реализации управления скоростью, как показано ниже:
Улучшено Крутящий момент на низкой скорости с использованием CMOS PWM Control
Хотя схемы регуляторов скорости линейного двигателя с одним MOSFET, описанные в начале статьи, включают преимущество простоты, но они могут иметь несколько недостатков.Один из них заключается в том, что в полевом МОП-транзисторе существует значительный уровень рассеивания, особенно когда двигатель настроен примерно на 50 процентов от оптимальной скорости. Однако это может быть, конечно, не серьезной проблемой, и просто требуется установка радиатора умеренно большого размера на полевой МОП-транзистор.
Гораздо более серьезное беспокойство вызывает то, что двигатель может заглохнуть, как только этот тип линейного регулятора настроен на более низкие скорости. Это связано с тем, что полевой МОП-транзистор в этой ситуации имеет относительно высокое сопротивление, что обеспечивает вход питания со значительно высоким выходным сопротивлением.
Когда нагрузка на двигатель увеличивается, он пытается потреблять чрезмерное количество тока питания, но это приводит к большему падению напряжения на транзисторе и более низкому напряжению питания на двигателе. В результате мощность, подаваемая на двигатель, существенно не меняется, а скорее уменьшается. Из-за этого у мотора есть склонность к заглоханию. Кроме того, существует обратная реакция, при которой снижение нагрузки на двигатель сокращает потребление тока, что приводит к увеличению напряжения питания и значительному увеличению скорости двигателя.
Используя контроллер, который подает импульсный сигнал ШИМ на двигатель, вы можете добиться гораздо лучшего управления скоростью двигателя.
Улучшенный крутящий момент с использованием управления скоростью CMOS PWM
Один из способов реализации этого, и тот, который здесь используется, состоит в том, чтобы иметь схему, которая обеспечивает фиксированную длительность выходного импульса при изменении частоты импульсов для изменения скорости двигателя. Низкая частота создает большие промежутки между импульсами и подает на двигатель относительно небольшую мощность.
При увеличении частоты нет заметных промежутков между импульсами, и двигатель получает почти постоянный сигнал.Это приводит к высокой средней мощности двигателя, который работает на полной скорости. Преимущество этой системы заключается в том, что когда двигатель работает в импульсном режиме, он, по сути, получает полную мощность в периоды включения импульсов и может потреблять большой ток питания, если нагрузка на двигатель действительно этого требует.
В результате двигатель приводится в действие последовательностью сильных импульсов, которые предотвращают остановку и обеспечивают улучшенный крутящий момент даже при пониженных скоростях.
На следующем рисунке изображена принципиальная схема импульсного управления скоростью двигателя постоянного тока.Здесь T1, D1, D2 и C1 получают достаточное питание постоянного тока от сети переменного тока. Tr1 подключен последовательно с двигателем, но его клемма затвора получает выходной сигнал от нестабильной схемы мультивибратора.
Эта схема ШИМ построена с использованием двух из четырех вентилей устройства CMOS 4001, которые используются в нестабильной схеме CMOS, которая представляет собой вполне обычную конструкцию.
Можно увидеть пару синхронизирующих резисторов, подключенных между выходом затвора 1 и переходом R1 и C2, что отличается от традиционной конструкции ШИМ.VR1 и R2 — это два резистора вместе с направляющими диодами D3 и D4, подключенными последовательно с выходом логического элемента И-НЕ 1.
Эти два диода гарантируют, что R2 работает как временное сопротивление всякий раз, когда на выходе нестабильного устройства высокий уровень, а VR1 функционирует как временное сопротивление, когда выход низкий.
Период выходных импульсов постоянен, поскольку R2 имеет заданное значение. Интервал между ними можно было изменить, варьируя VR1. Это будет почти нулевое значение при настройке на самое низкое сопротивление.Расстояние между метками вывода больше десяти к одному при максимальном сопротивлении.
VR1, следовательно, можно отрегулировать для создания желаемой скорости двигателя с эффективным крутящим моментом, при этом самая низкая скорость достигается при полном сопротивлении, а самая высокая скорость — при нулевом сопротивлении.
Прецизионное управление двигателем с помощью одного операционного усилителя
Чрезвычайно тонкое или сложное управление постоянным током. Двигатель может быть получен с помощью операционного усилителя и тахогенератора. Операционный усилитель выполнен в виде переключателя, чувствительного к напряжению.В схеме, показанной ниже, как только выходная мощность тахогенератора становится ниже, чем заданное опорное напряжение, переключающий транзистор включается, и на двигатель подается 100% мощность.
Переключение операционного усилителя произойдет всего за пару милливольт от опорного напряжения. Вам понадобится двойной источник питания, который может быть просто стабилитроном.
Этот контроллер мотора обеспечивает плавную регулировку диапазона без каких-либо механических проблем.
Выходной сигнал операционного усилителя составляет всего +/- 10% от уровня шины питания, таким образом, используя двойной эмиттерный повторитель, можно контролировать огромные скорости двигателя.
Опорное напряжение может быть зафиксировано с помощью термисторов или LDR и т. Д. Экспериментальная установка, указанная на принципиальной схеме, использовала операционный усилитель RCA 3047A и двигатель мощностью 0,25 Вт 6 В в качестве тахогенератора, который генерировал около 4 В при 13000. об / мин для предполагаемой обратной связи.
Дополнительные схемы схем :
ШИМ-управление двигателем с использованием только BJT
Следующая схема также использует принцип ШИМ для желаемого управления скоростью двигателя, однако он не зависит от каких-либо интегральных схем или ИС, а использует только обычные BJT. для реализации.Я взял это со страницы старого журнала.
Цепи управления двигателем с использованием LM3524
IC LM3524 представляет собой специализированную схему ШИМ-контроллера, которая позволяет нам конфигурировать очень полезные и точные схемы управления скоростью двигателя, как описано ниже:
На приведенной выше диаграмме показана базовая схема управления ШИМ-двигателем с использованием IC LM3524. Конструкция дополнительно включает управление обратной связью на основе датчика через микросхему LM2907.
Небольшой магнит прикреплен к валу двигателя, так что во время вращения магнит проходит вплотную к трансформатору со считывающей катушкой с железным сердечником.Этот механизм заставляет вращающийся магнит индуцировать резкий электрический импульс в считывающей катушке, который используется LM2907 в качестве входа триггера и соответствующим образом обрабатывается как импульс управления обратной связью для LM3524 IC.
Система обратной связи гарантирует, что заданная скорость никогда не может отклоняться от заданной, обеспечивая точное управление скоростью. Гнездо на штыре № 2 LM3524 используется для управления скоростью двигателя.
Бездатчиковое управление, без обратной ЭДС двигателя
Следующая конструкция ШИМ-управления скоростью LM3525 позволяет осуществлять управление с обратной связью без использования сложного механизма тахометра или громоздких датчиков, реализованных в предыдущей конструкции.
Здесь обратная ЭДС двигателя используется в качестве сигнала обратной связи и подается на вход IC LF198. В случае, если скорость имеет тенденцию к превышению установленного уровня, LF198 сравнивает нарастающий сигнал ЭДС с эталонным сигналом выборки с выхода LM393. Результирующий выходной сигнал отправляется на усилитель ошибки микросхемы LM3524 для необходимой обработки выходного ШИМ на транзисторы драйвера. Контролируемый ШИМ благодаря этой обратной связи без датчика через обратную ЭДС в конечном итоге позволяет двигателю оставаться точно зафиксированным на правильной скорости, которая регулируется потенциометром на контакте №2.
Как сделать ШИМ-контроллер скорости двигателя постоянного тока с использованием таймера 555 IC
В этом уроке мы узнаем, как создать ШИМ-контроллер скорости двигателя постоянного тока с использованием микросхемы таймера 555. Мы подробно рассмотрим, как работает схема генератора ШИМ с таймером 555, как использовать ее для управления скоростью двигателя постоянного тока и как сделать для нее специальную печатную плату.
РЕКОМЕНДУЕТСЯ Обзор
Мы можем контролировать скорость двигателя постоянного тока, контролируя входное напряжение двигателя.Для этого мы можем использовать ШИМ или широтно-импульсную модуляцию.
ШИМ-регулятор скорости двигателя постоянного тока
PWM — это метод, с помощью которого мы можем генерировать переменное напряжение, быстро включая и отключая питание, которое подается на электронное устройство. Среднее напряжение зависит от рабочего цикла сигнала или количества времени, в течение которого сигнал находится в состоянии ВКЛ, по сравнению с количеством времени, в течение которого сигнал отключен за один период времени.
Цепь генератора ШИМ таймера 555
Таймер 555 способен генерировать сигнал ШИМ при настройке в нестабильный режим.Если вы не знакомы с таймером 555, вы можете проверить мое предыдущее руководство, где я подробно объяснил, что находится внутри и как работает микросхема таймера 555.
Вот базовая схема таймера 555, работающего в нестабильном режиме, и мы можем заметить, что выходной сигнал ВЫСОКИЙ, когда конденсатор C1 заряжается через резисторы R1 и R2.
С другой стороны, выход IC имеет низкий уровень, когда конденсатор C1 разряжается, но только через резистор R2.Таким образом, мы можем заметить, что если мы изменим значения любого из этих трех компонентов, мы получим разные времена включения и выключения или другой рабочий цикл выходного сигнала прямоугольной формы. Простой и мгновенный способ сделать это — заменить резистор R2 на потенциометр и дополнительно добавить в схему два диода.
В этой конфигурации время включения будет зависеть от резистора R1, левой стороны потенциометра и конденсатора C1, а время выключения будет зависеть от конденсатора C1 и правой стороны потенциометра.Мы также можем заметить, что в этой конфигурации период одного цикла, то есть частота, всегда будет одинаковой, потому что полное сопротивление во время зарядки и разрядки останется неизменным.
Обычно сопротивление R1 намного меньше, чем сопротивление потенциометра, например 1 кОм по сравнению с 100 кОм потенциометра. Таким образом, мы на 99% контролируем сопротивление заряда и разряда в цепи. Управляющий вывод таймера 555 не используется, но он подключен к конденсатору емкостью 100 нФ, чтобы устранить любые внешние помехи от этого вывода.Сброс, контакт номер 4, активен на низком уровне, поэтому он подключен к VCC, чтобы предотвратить любой нежелательный сброс выхода.
Выход таймера 555 может потреблять или передавать ток 200 мА в нагрузку. Поэтому, если двигатель, которым мы хотим управлять, превышает это значение, нам нужно использовать транзистор или полевой МОП-транзистор для управления двигателем. В этом примере я использовал транзистор Дарлингтона (TIP122), который может выдерживать ток до 5А.
Выход микросхемы необходимо подключить к базе транзистора через резистор, а в моем случае я использовал резистор 1 кОм.Для предотвращения скачков напряжения, создаваемых двигателем, нам необходимо использовать обратный диод, который подключен параллельно двигателю.
Разработка печатной платы для ШИМ-контроллера скорости двигателя постоянного тока
Теперь мы можем перейти к разработке специальной печатной платы для этой схемы. Для этого я воспользуюсь бесплатным онлайн-программным обеспечением EasyEDA. Здесь мы можем начать с поиска и размещения компонентов на пустом холсте. Библиотека состоит из сотен тысяч компонентов, поэтому у меня не возникло проблем с поиском всех необходимых компонентов для этой схемы ШИМ-контроллера скорости двигателя постоянного тока.
После вставки компонентов нам нужно создать контур платы и начать расположение компонентов. Два конденсатора должны быть размещены как можно ближе к таймеру 555, в то время как другие компоненты могут быть размещены где угодно, но все же в логическом порядке в соответствии с принципиальной схемой.
Используя инструмент отслеживания, нам нужно соединить все компоненты. Инструмент отслеживания интуитивно понятен и с ним легко работать. Мы можем использовать как верхний, так и нижний слой, чтобы избежать пересечений и сделать пути короче.
Контактные площадки компонентов, которые необходимо подключить к заземлению, устанавливаются на «Земля» на вкладке «Свойства контактной площадки», где нам нужно ввести GND в метку «Сеть», когда контактная площадка выбрана.
Мы можем использовать слой Silk, чтобы добавить текст на доску. Также мы можем вставить файл изображения, поэтому я добавляю изображение логотипа своего веб-сайта, которое будет напечатано на доске. В конце, используя инструмент «Медная область», нам нужно создать область заземления печатной платы.
Здесь вы можете найти файлы проекта EasyEDA этого проекта.
Когда мы закончим проектирование, нам просто нужно нажать кнопку «Вывод Gerber», сохранить проект, и мы сможем загрузить файлы Gerber, которые используются для изготовления печатной платы. Мы можем заказать печатную плату в JLCPCB, которая занимается производством печатных плат EasyEDA, а также является спонсором этого видео.
Здесь мы можем просто перетащить загруженный zip-файл с файлами gerber. После загрузки мы можем еще раз просмотреть печатную плату в программе просмотра Gerber.Если все в порядке, мы можем выбрать до 10 печатных плат и получить их всего за 2 доллара.
Сборка печатной платы контроллера скорости двигателя постоянного тока с ШИМ
Тем не менее, через неделю печатные платы были доставлены, и я должен признать, что создание собственной конструкции печатной платы весьма приятно. Качество печатных плат отличное, все точно так же, как и в дизайне.
Хорошо, теперь мы можем перейти к вставке компонентов на плату.
Вы можете получить компоненты, необходимые для этого примера, по ссылкам ниже:
Раскрытие информации: это партнерские ссылки.Как партнер Amazon я зарабатываю на соответствующих покупках.
Сначала я вставил более мелкие компоненты, резисторы, диоды и конденсаторы.
Я согнул их выводы с другой стороны, чтобы они оставались на месте, когда я переворачиваю плату для пайки. Что касается более крупных компонентов, я использовал малярную ленту, чтобы удерживать их на месте при переворачивании платы.
Вот окончательный вид платы, и теперь осталось подключить двигатель постоянного тока и подходящий источник питания для него.
Я использовал двигатель постоянного тока с высоким крутящим моментом 12 В, который я питал от литий-ионных батарей 3,7 В, соединенных последовательно, что дает около 12 В. Итак, теперь, используя потенциометр, мы можем контролировать скорость двигателя постоянного тока или сигнал ШИМ, создаваемый микросхемой таймера 555.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любой вопрос в разделе комментариев ниже.
12V-24V PWM Схема контроллера двигателя с использованием TL494-IRF1405
Если вы ищете высококачественные схемы контроллера двигателя 24V PWM.У нас есть для вас много схем. Но сегодня я вам покажу. Возможно, вам лучше использовать TL494 и IRF1405.
Почему он особенный. Представьте, что в схеме есть система проверки низковольтной батареи, работающая с плавным пуском, регулирующая частоту импульсов и использующая батарею 12 В или 24 В при токе до 20 А.
А он маленький и простой. Не нужно программировать программное обеспечение (без микроконтроллера).
Он использует TL494, HEXFET и LM2940 в качестве основных.
Есть 3 схемы ниже!
ШИМ-схема управления скоростью двигателя постоянного тока 12 В с использованием TL494
Это схема ШИМ управления скоростью двигателя постоянного тока 12 В.Которая с использованием TL494 (ИС управления широтно-импульсной модуляцией в импульсном режиме) является базой для управления двигателем постоянного тока с помощью импульса.
Подробная информация:
— Для управления скоростью двигателя 12 В, 150 Вт, макс. 15 А.
— R6 регулирует скорость двигателя.
— Драйвер двигателя от Mosfet IRFZ48.x 2шт.
— Управление на частоте 100 Гц
— Регулировка рабочего цикла ШИМ от 0 до 100%
— Время нарастания и спада = 10 мкс
— Имеется ток перегрузки 15 А или ограничение тока с протекающим током, бросок R11 и Q1 работают для остановки IC1
12 В -24V PWM Схема контроллера двигателя с использованием TL494 и IRF1405
Работа схемы
Рис: 1 Принципиальная схема этого проекта.
Характеристики проекта
— Диапазон питания: от 12 В до 30 В
— Потребляемый ток: максимум при 20 А
— Токовый выход: максимум при 20 А
— Ток в режиме ожидания: 20 мА
— Контроллер двигателя: от 0 до 100%
— Отключение Работа при более низком напряжении батареи: как настройка 11,5 В для 12 В и 23 В для батареи 24 В.
— Регулировка частоты импульсов: от 100 Гц до 1,1 кГц (от 129 Гц до 1,28 кГц в этом проекте)
— Плавный запуск: от 0 до 100% в диапазоне менее 1 секунды
Нарастающий и спадающий фронт импульса на затворе МОП-транзистор: 1.5uS и 1.6uS
-VR1: регулировка скорости
-VR4: защита выхода низкого напряжения
-VR3-регулировка частотно-импульсного выхода
-VR2-sub контроллер скорости
Рис. 2 Схема медной печатной платы
Рис: Схема 3-х компонентов этого проекта.
Примечание:
Мой друг прислал мне эту схему. Он сказал, что это очень хороший контроллер двигателя постоянного тока с высоким током. Но это полная статья, а не четкое фото.
Детали, которые вам понадобятся
- IC1: TL494, широтно-импульсная модуляция (ШИМ)
- REG1: LM2940CT-12, регулятор
- Q1, Q2: IRF1405, N-канальный полевой МОП-транзистор
- Q3: BC327, транзистор 45 В, 800 мА
- Q4: 2N5484, N-канальный полевой транзистор
- D1: MBR20100CT, высокочастотный диод
- D2-D6: 1N4148, 75 В 0.15A Диоды
- ZD1, ZD2: 1N4744, стабилитрон
Конденсаторы
- C5: 22 мкФ 16 В, электролитический
- C3, C6, C7, C10: 10 мкФ 16 В, электролитический C
- C1: 470 нФ 63 В, полиэстер
- C2, C8: 100 нФ 63 В, полиэстер
- C9: 56 нФ 63 В, полиэстер
0,25 Вт Допуск резисторов: 1%
- R1, R4, R10: 100 K R3
- 9017 , R5: 10K
- R6, R7: 2,2K
- R2: 1K
- R8, R9: 47 Ом
- VR1: 10K Подстроечный резистор
- VR2: Подстроечный резистор 10K
- VR3, VR4: 10017 Подстроечный резистор Потенциометр
- Прочие детали, печатная плата, радиатор и прочее.
Управление двигателем 24 В с защитой от короткого замыкания 20 А
Это контроллер двигателя 24 В постоянного тока при токе 20 Ампер. По нему используется управление IC SG3526B в символьном ШИМ, которое получает очень много и приводной двигатель с мощностью Mosfet номер IRFP7410 x 2 шт. Затем можно применить к двигателю постоянного тока при использовании 20 ампер, удобнее и по-прежнему иметь схему защиты от выстрела. Вы видите, как детализация добавляется на изображенной схеме.
Вращение скорости ШИМ вперед-назад и рекуперативное торможение
Это цепь вращения двигателя постоянного тока скорости ШИМ.Он может работать в прямом и обратном направлении и с функцией рекуперативного торможения. По этой схеме используется сигнал ШИМ управления скоростью двигателя постоянного тока 12 В с силовым полевым МОП-транзистором IRF150.
Реле RY1 использует управление реверсом с цифровой сигнализацией, изменением, Q10. Реле RY2 работает как функциональный тормозной резистор. С помощью управления Запуск или остановка с помощью цифрового сигнала тревоги с помощью. F1, используйте защиту через цепь.
D1 используется для защиты обратного тока от двигателя постоянного тока. Детали другие, пожалуйста, смотрите в схеме.
ПОЛУЧИТЬ ОБНОВЛЕНИЕ ПО ЭЛЕКТРОННОЙ ПОЧТЕ
Я всегда стараюсь сделать Electronics Learning Easy .
Широтно-импульсная модуляция (ШИМ) | Видео о круговых навыках Collin Cunningham
ШИМ-контроллер: устройства управления с помощью цифрового сигнала
Коллин Каннингем.Широтно-импульсная модуляция (ШИМ) — очень умный способ использования электричества для управления аналоговыми устройствами с помощью цифрового сигнала. Это очень простой метод, который очень эффективен для управления двигателями, лампами, светодиодами и многим другим!
Прекрасный пример использования ШИМ — это если вы когда-либо приглушали светодиод с помощью Arduino:
Затухание — Демонстрирует использование функции analogWrite () для затухания и включения светодиода.AnalogWrite использует широтно-импульсную модуляцию (PWM), очень быстро включающую и выключающую цифровой вывод для создания эффекта затухания.
Однако вам не нужен микроконтроллер для генерации сигнала ШИМ. Микросхему таймера 555 можно настроить так, чтобы ее выходной рабочий цикл зависел от потенциометра — с помощью некоторых простых схем.
Создайте свой собственный комплект широтно-импульсного модулятора Навыки схемы : видео с широтно-импульсной модуляцией
Для более надежного решения вы можете рассмотреть комплект DC to Pulse Width Modulator, подходящий для отправки до 6.5 А и построен на базе Motorola SG3525 — микросхемы, посвященной искусству ШИМ.
Конечно, Коллин отрицал бы свою природу, если бы не упомянул хотя бы одно приложение, связанное со звуком. ШИМ пригодится для генерации простых звуков и мелодий с микроконтроллера.
Arduino Simple Sounds
Wavetable Melody Generator
Щелкните здесь для просмотра технических данных Velleman K8004.
Видео «Сделай сам» для других схемотехнических навыков от Коллина:
Травление печатной платыФункциональный генератор и корпуса
Инфракрасный световой барьер
Светодиодный цветной орган
Прототипирование перфорированной платы
Источник питания
Устройства для поверхностного монтажа
Волоконная оптика
Комплект светодиодной матрицы
Если вы решите создать модульный комплект от постоянного тока до ширины импульса, мы хотели бы услышать о ваших результатах! Отправьте свою историю на [адрес электронной почты]
Широтно-импульсная модуляция — Основы схемотехники
Широтно-импульсная модуляция или ШИМ — это цифровая технология, позволяющая более эффективно пропорциональное управление аналоговыми устройствами.Он генерирует импульсы переменной ширины для представления амплитуды аналогового входного сигнала. Транзистор переключения выхода большую часть времени включен для сигнала высокой амплитуды и выключен большую часть времени для сигнала низкой амплитуды. Цифровая природа (полностью включенная или выключенная) схемы ШИМ менее затратна в изготовлении, чем аналоговая схема, которая не дрейфует во времени. Типичными устройствами, использующими это, являются двигатели постоянного тока, обогреватели, фонари, светодиоды, двигатели гибридных автомобилей, печи, обжиговые печи, вентиляторы и т. Д.
Как это работает
В прошлом такие устройства могли управляться простым встроенным резистором.Но согласно закону Ома это приведет к сильному нагреву резистора. Таким образом, последовательность импульсов умеренно высокой частоты подается на устройство через подходящий управляющий транзистор или силовой полевой МОП-транзистор в цифровой системе. Теперь, поскольку привод либо полностью включен, либо полностью выключен, в устройстве отсутствуют потери I 2 R (на самом деле полевой МОП-транзистор может иметь небольшое сопротивление в открытом состоянии в несколько миллиомов).
Если драйвер работает половину времени и выключен половину времени, имеет смысл, что средняя мощность нагревателя составляет только половину или 50%.Если соотношение включения и выключения является переменным, можно получить любую степень контроля.
На рисунке выше мы видим, что импульс включен в течение 8 мс и выключен в течение 13 мс. Период — это сумма двух, которая составляет 8 + 13 = 21 мс. Частота обратно пропорциональна периоду, который составляет 1/21 мс = 47,6 Гц. Рабочий цикл или отношение метки к промежутку составляет (ширина ÷ период) * 100 = (8/21) * 100 = 38%.
Если бы импульсное напряжение было 5 В, среднее напряжение постоянного тока было бы рабочим циклом * V = (38/100) * 5 = 1,9 В.
Пример схемы
В схеме выше мы видим 555, подключенный как нестабильный генератор ШИМ.Q1 — это полевой МОП-транзистор, IRF540 — в порядке, а D1 — это светодиод (или, например, небольшой двигатель постоянного тока). D2 предотвращает повреждение полевого МОП-транзистора любой обратной ЭДС от индуктивной нагрузки (если бы светодиод был двигателем). Частота фиксирована и является функцией R1, 2 и 4 с C3 и составляет около 595 Гц. R4 (около 20 кОм) регулирует рабочий цикл, и, как вы можете видеть на двух дисплеях осциллографа ниже, он составляет от 78 мкс до 1,6 мс. Как и раньше, период 78 + 1600 мкс = 1678 мкс, а частота 1 / P = 596 Гц.
Расчет рабочего цикла в примере 1, (ширина ÷ период) * 100 = (77.9 ÷ 1678) * 100 = 4,6%, а в примере 2 (1570 ÷ 1678) * 100 = 93,5%.
Итак, как вы видите, мы можем очень красиво уменьшить яркость светодиода D1 или управлять скоростью небольшого двигателя.
Если бы вы спустились до 0%, у вас была бы прямая линия внизу кривой при 0 В и 100% то же самое, но при 5 В.
Здесь уместно задать вопрос: какое влияние имеет частота при любом рабочем цикле? Собственно, нет. Однако, если частота слишком низкая, вы увидите видимое мерцание светодиода, а если слишком высокая, устройство управления или нагрузка не смогут включаться и выключаться достаточно быстро.
| Макет вышеуказанной схемы | A 50% рабочий цикл |